基于图像匹配的飞行器导航定位算法及仿真
目标定位跟踪算法及仿真程序
目标定位跟踪算法及仿真程序目标定位和跟踪是机器视觉和计算机图形学中一个重要的研究领域,旨在实现对视频图像中的目标进行准确的定位和持续的跟踪。
随着计算机视觉和深度学习的发展,目标定位和跟踪的算法也在不断进步和创新。
本文将介绍目标定位和跟踪算法的基本原理,并给出一个基于Python的仿真程序实例。
目标定位算法的基本原理是通过图像处理和特征提取来找到目标在图像中的位置。
常用的算法包括边缘检测算法、颜色分割算法、模板匹配算法等。
边缘检测算法通过检测图像中的边缘来定位目标,常用的算法有Sobel算子、Canny算子等。
颜色分割算法通过检测目标的颜色来定位目标,常用的算法有HSV颜色空间分割算法等。
模板匹配算法通过比对目标特征与图像的相似度来定位目标,常用的算法有模板匹配算法、相关滤波器算法等。
目标跟踪算法的基本原理是通过目标的运动信息和外观特征来实时追踪目标。
常用的算法包括卡尔曼滤波算法、粒子滤波算法、深度学习算法等。
卡尔曼滤波算法是一种常用的线性状态估计算法,通过迭代的方式对目标的位置和速度进行估计。
粒子滤波算法是一种基于贝叶斯滤波的非线性状态估计算法,通过一组粒子对目标的位置进行采样和估计。
深度学习算法利用卷积神经网络等深度学习模型对目标进行特征提取和跟踪。
下面以一个基于Python的仿真程序为例进行说明。
程序首先读取一个视频文件,并使用OpenCV库进行视频的读取和显示。
然后选择目标定位和跟踪的算法,并利用算法对视频帧进行处理,获取目标的位置信息。
最后,通过绘制矩形框来标记目标的位置,并将处理后的视频帧显示出来。
```pythonimport cv2#读取视频文件video = cv2.VideoCapture("video.mp4")#创建窗口dWindow("Object Tracking", cv2.WINDOW_NORMAL)#选择目标定位和跟踪算法#...while True:#读取视频帧ret, frame = video.readif not ret:break#目标定位和跟踪算法处理#...#绘制矩形框标记目标位置cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2) #显示处理后的视频帧cv2.imshow("Object Tracking", frame)#按下ESC键退出程序if cv2.waitKey(1) == 27:break#释放资源video.releasecv2.destroyAllWindows```以上为一个简单的目标定位和跟踪的仿真程序示例,具体的算法实现需要根据具体场景和需求进行选择和开发。
基于图像处理的视觉定位与导航系统设计
基于图像处理的视觉定位与导航系统设计视觉定位与导航技术是无人驾驶、无人机及机器人等智能系统中重要的核心技术之一。
它可以通过实时处理图像数据,对周围环境进行识别、定位和导航,使机器能够在没有人的干预下完成特定任务。
本文将重点介绍基于图像处理的视觉定位与导航系统的设计。
视觉定位与导航系统的设计主要包括三个方面:图像数据采集、定位与建图、路径规划与导航。
下面将依次介绍这三个方面的设计内容。
首先是图像数据采集。
视觉定位与导航系统需要通过摄像头等设备采集周围环境的图像数据,以获取有关环境特征的信息。
为了提高系统的鲁棒性和精确性,应选择视野广阔、分辨率高的摄像头,并合理安装在合适的位置上。
同时,还需要考虑图像数据的实时性,以保证系统能够对环境的变化作出及时响应。
其次是定位与建图。
定位是指系统能够准确地确定自身在环境中的位置信息,建图是指系统能够生成环境的地图以供导航使用。
在基于图像处理的视觉定位与导航系统中,常用的定位方法包括特征点匹配、激光雷达测距和深度学习等。
特征点匹配方法通过比对摄像头采集的图像与预先存储的地图特征点进行匹配,从而实现定位。
激光雷达测距则利用激光传感器扫描环境,测量自身与周围物体的距离,实现定位和建图。
深度学习方法则通过训练神经网络,使其能够从图像中提取特征,并进行定位和建图。
最后是路径规划与导航。
路径规划是指系统能够根据定位和建图结果,找到从出发点到目标点的最佳路径。
导航是指系统根据规划出的路径,自主控制车辆或机器人完成导航任务。
在基于图像处理的视觉定位与导航系统中,常用的路径规划方法包括图搜索算法、A*算法和遗传算法等。
这些算法可以根据地图的特性,找到最优的路径。
导航方法则涉及到自主导航控制、障碍物避障和路径跟踪等技术,通过精确控制车辆或机器人的动作来完成导航任务。
除了以上的基本设计内容,基于图像处理的视觉定位与导航系统还可以进一步优化与完善。
例如,可以考虑引入多传感器融合技术,将图像处理与激光雷达、惯性测量单元等其他传感器的数据进行融合,提高系统的定位精度和鲁棒性。
基于视觉SLAM的室外定位和导航系统设计与实现
基于视觉SLAM的室外定位和导航系统设计与实现近年来,随着无人机、自动驾驶等技术的发展,基于视觉SLAM(simultaneous localization and mapping)的室外定位和导航系统受到了越来越多的关注。
SLAM 是一种利用传感器数据实时构建环境地图并同时定位的技术,通过使用相机及其他传感器,系统能够根据外部环境的信息进行自主导航和定位。
基于视觉SLAM的室外定位和导航系统设计与实现涉及多个方面,包括传感器选择、地图构建和定位、路径规划以及系统集成等。
在这篇文章中,我们将着重讨论这些方面的内容,并提供一种具体的设计与实现思路。
首先,传感器的选择对于系统的性能至关重要。
在室外环境中,常用的传感器包括相机、惯性测量单元(IMU)、全球定位系统(GPS)等。
相机是进行视觉信息获取的核心传感器,可以通过图像的特征点提取与匹配进行地图构建和定位。
IMU可以提供姿态和加速度等数据,有助于提高定位的精度和鲁棒性。
GPS则提供全球定位信息,但在室外环境中由于信号不稳定,单独使用的精度较低,因此通常与其他传感器相结合使用,以提高定位的准确性。
其次,在地图构建和定位方面,视觉SLAM利用相机采集的图像进行特征点的提取与匹配,通过特征点的三维重建构建地图,并根据相机姿态估计实现定位。
在室外环境中,地图更新的频率要求并不高,可以基于关键帧的方式进行地图构建,以提高系统的实时性。
同时,地图的稀疏性也可以减少数据处理的计算量,降低系统成本。
第三,路径规划是室外定位和导航系统中非常重要的一部分。
路径规划旨在为系统提供最佳的导航路线,以实现从起点到终点的自主导航。
基于视觉SLAM的路径规划中,可以使用地图提供的信息,利用搜索算法(如A*算法)或者最优化方法(如Dijkstra算法)来生成最佳的路径。
此外,还可以考虑到环境的避障需求,使用避障算法(如Rapidly-exploring Random Trees算法)对路径进行进一步优化。
基于SIFT的影像匹配方法研究和实现 - 许世娇

传统影像匹配主要利用了影像的灰度信息,仅能满足辐射和几何畸变不大的影像对,适应性较差。近几年来,国内外学者对匹配算法的研究已经取得了显著的成果。SIFT算法是目前性能最好的一种特征点匹配算法,它不受图像几何变形的影响,对影像的视角差异、噪声、光照不同也有很好的鲁棒性。因此,本文对SIFT算法的基本原理、特征提取以及实现方法等做了深入的研究。
随着科技信息的进步,我们对图像信息需求的日益增加,近几年来对图像处理的研究日趋成熟。而数字图像处理技术可以为图像处理提供更加广阔的研究思想。在20世纪60年代国内外学者们首次提出了数字图像处理这一个概念,起初图像处理只能起到改善图像质量的作用。在当今社会中,对于信息的获取、处理以及应用已经成为我们生活的重要组成部分,数字图像处理在科技信息过程中的地位是无可替代的。数字图像处理慢慢的渗入到各行各业,开发出更高、更深的功能,已经取得了重大的成就。迄今为止,数字图像处理技术已经应用到通讯领域、生物工程、农业、工业生产、军事以及航空航天等领域中,并在其中扮演着越来越重要的角色,发挥着显著的作用。
雷达与图像融合算法在航空导航中的应用技巧
雷达与图像融合算法在航空导航中的应用技巧引言:航空导航在现代飞行中起着至关重要的作用,它是飞行员确定航向、位置和高度的基石。
随着科技的进步,雷达与图像融合算法被广泛应用于航空导航领域,有效提高了导航的准确性和可靠性。
本文将介绍雷达与图像融合算法及其在航空导航中的应用技巧,以期为相关研究和实践提供参考。
一、雷达与图像融合算法的基本原理1.1 雷达原理雷达是一种利用射频波和回波反射特性进行距离测量和探测的设备。
它通过发射电磁波,接收返回的回波来探测目标的位置、速度和方位角等信息。
1.2 图像融合算法原理图像融合算法是将多个图像融合为一个具有更高质量和更全面信息的图像的过程。
它通过整合不同传感器获得的图像信息,提高图像的清晰度、分辨率和对比度。
1.3 雷达与图像融合算法原理雷达与图像融合算法是将雷达获取的信息与图像获取的信息相结合,实现对目标的准确位置和特征的判别。
该算法主要利用雷达的高精度测距和图像的高清分辨率,将两者相互补充,提高导航的可靠性和准确性。
二、雷达与图像融合算法在航空导航中的应用2.1 目标检测与跟踪雷达与图像融合算法可以通过联合使用雷达和视觉传感器,实现对飞行器周围障碍物的检测和跟踪。
通过融合雷达的距离信息和图像的颜色和纹理信息,可以更准确地识别和定位障碍物,为飞行员提供可靠的导航指导。
2.2 地形识别与导航在航空导航中,了解飞行器所处的地形是至关重要的。
雷达与图像融合算法可以将地形数据与图像进行融合,实现对地形的精确识别和导航。
通过利用雷达测距的精确性和图像的高清分辨率,该算法可以提供飞行器所在位置的准确高度和地形数据,保证飞行的安全和顺利进行。
2.3 气象信息获取雷达与图像融合算法还可以应用于获取气象信息,包括降水、云层、大气湿度等。
通过融合雷达的回波信息和图像的纹理信息,可以实现对降水和云层的检测和识别。
这为飞行员提供了重要的天气预警和导航信息,保障飞行安全。
三、雷达与图像融合算法的应用技巧3.1 数据预处理与配准技术在雷达与图像融合算法中,数据预处理和配准技术是至关重要的环节。
基于双目视觉的无人飞行器目标跟踪与定位

基于双目视觉的无人飞行器目标跟踪与定位张梁;徐锦法【摘要】According to the problem of target tracking for UAV, a target tracking and locating algorithm based on Camshift algorithm and binocular vision is proposed. The left and right images from binocular camera are used to calculate the central interesting point of the target with Camshift algorithm. After the central interesting point is reconstructed, the relative position and yaw angle between UAV and target under the body coordinate system are got. Data is optimized with the kalman filter. The estimated data is used as the flight control system loopback input data to achieve the autonomous tracking of UAV. The result of the experiment shows that the error of the algorithm is little. This algorithm has strong stability and accuracy.%针对小型无人飞行器跟踪目标的问题,提出了一种基于双目视觉和Camshift算法的无人飞行器目标跟踪以及定位算法。
航天飞行器导航与控制系统设计与仿真
航天飞行器导航与控制系统设计与仿真导语:航天飞行器是现代科技的巅峰之作,它的导航与控制系统是其正常运行和控制的核心。
本文将探讨航天飞行器导航与控制系统的设计原理、关键技术以及仿真模拟的重要性。
一、航天飞行器导航与控制系统设计原理航天飞行器的导航与控制系统设计原理主要包括三个方面,即姿态控制、导航定位和轨迹规划。
1. 姿态控制:姿态控制是指通过控制飞行器的各种运动参数,使其保持稳定的飞行姿态。
对于航天飞行器来说,由于外部环境的复杂性和飞行任务的特殊性,姿态控制尤为重要。
常用的姿态控制方法包括PID控制、模型预测控制和自适应控制等。
2. 导航定位:导航定位是指通过测量飞行器的位置和速度等参数,确定其在空间中的位置。
现代航天飞行器的导航定位通常采用多传感器融合的方式,包括惯性导航系统、卫星定位系统和地面测控系统等。
其中,卫星导航系统如GPS、北斗系统等具有广泛应用。
3. 轨迹规划:轨迹规划是指根据航天飞行器的飞行任务和外部环境的要求,确定其飞行轨迹和航线。
航天飞行器的轨迹规划需要考虑多个因素,如飞行器的运动特性、飞行任务的要求、空间障碍物等。
二、航天飞行器导航与控制系统的关键技术航天飞行器导航与控制系统设计离不开一些关键技术的支撑,其中包括:1. 传感器技术:传感器技术是导航与控制系统的基础,可以通过传感器对飞行器的姿态、速度、位置等进行准确测量。
陀螺仪、加速度计、GPS接收机等传感器设备的精度和稳定性对导航与控制系统的性能有着重要影响。
2. 控制算法:姿态控制和导航定位需要高效的控制算法来实现。
PID控制算法是常用的姿态控制方法,模型预测控制和自适应控制等算法则在一些特殊应用中得到了广泛应用。
对于导航定位,卡尔曼滤波和粒子滤波等算法可以很好地利用多传感器信息进行位置估计。
3. 轨迹规划算法:航天飞行器的轨迹规划需要考虑多个因素,如安全性、能耗等。
基于遗传算法和优化算法的轨迹规划方法可以在不同的约束条件下求解最优解。
北斗导航系统定位算法仿真研究
北斗导航系统定位算法仿真研究一、概述随着科技的快速发展,卫星导航系统已经成为现代社会不可或缺的重要技术支撑。
北斗导航系统作为我国自主研发的全球卫星导航系统,在军事、民用等多个领域都发挥着关键作用。
北斗导航系统的定位算法作为实现精准定位的核心技术,其性能优劣直接影响到整个系统的定位精度和稳定性。
对北斗导航系统定位算法进行深入研究与仿真分析,对于提升系统性能、优化定位效果具有重要意义。
本文旨在通过对北斗导航系统定位算法进行仿真研究,深入剖析其工作原理、性能特点以及影响因素。
我们将介绍北斗导航系统的基本组成、工作原理以及定位算法的基本原理。
我们将建立北斗导航系统定位算法的仿真模型,包括信号传播模型、接收机模型、误差模型等,以便对算法性能进行定量评估。
我们将通过仿真实验,分析不同场景下定位算法的性能表现,探讨影响定位精度的主要因素,并提出相应的优化策略。
通过本文的研究,我们期望能够为北斗导航系统定位算法的优化提供理论支持和实践指导,推动北斗导航系统在实际应用中的性能提升和拓展。
本文的研究成果也将为其他卫星导航系统的定位算法研究提供一定的参考和借鉴价值。
1. 北斗导航系统概述北斗卫星导航系统(Beidou Navigation Satellite System,简称BDS),作为中国自行研制的全球卫星导航系统,是中国着眼于国家安全和经济社会发展需要,自主建设运行的时空基础设施。
它旨在为全球用户提供全天候、全天时、高精度的定位、导航和授时服务。
北斗系统由空间段、地面段和用户段三部分组成,其服务范围覆盖全球,具有高精度、高可靠性,并具备短报文通信能力。
北斗导航系统的发展经历了北斗一号、北斗二号和北斗三号三个阶段。
北斗一号系统于2000年年底建成,开始向中国提供服务北斗二号系统于2012年年底建成,服务范围扩展至亚太地区而北斗三号系统则于2020年建成,实现了向全球提供服务的目标。
随着全球组网的成功,北斗卫星导航系统的国际应用空间将会不断扩展,为全球科技、经济和社会发展做出贡献。
星图匹配技术在航空航天领域中的应用研究

星图匹配技术在航空航天领域中的应用研究随着现代科技的不断进步,航空航天领域的应用也越来越广泛。
而其中一项受到重视的技术便是星图匹配技术。
它的应用范围从卫星导航到太空探索,已经深入到了航空航天工业的许多领域。
一、星图匹配技术介绍星图匹配技术是一种将卫星或飞行器拍摄到的星空图像和既有的星图进行比较的技术。
其主要原理是依靠计算机图像处理技术,将两种星图进行匹配,从而定位航空器的位置和方向。
这项技术的优势在于其能够适应各种天气条件和地理环境,并具有高精度、高速度、高可靠性等特点。
二、星图匹配技术的应用1.卫星导航在卫星导航中,星图匹配技术能够在不使用定位协议的情况下,增强定位精度和可靠性。
通过计算目标天体的方位角和高度角,能够确定卫星的位置,同时以此校准卫星定位系统的位置信息,提高定位精度。
2.火星探测火星探测中,星图匹配技术也被广泛应用,能够辅助太空器的姿态控制和导航。
通过比较画面中的星座和地图中的星座,可以确定探测器的方向,校准姿态参数,从而保证任务的顺利完成。
3.地球观测在地球观测中,星图匹配技术被用于地球遥感和气候监测领域。
通过对星空图像进行处理和比对,可以构建出三维的地球模型,实现对地球表面的高精度测量和全球范围的气象监测。
4.无人机应用星图匹配技术也能够被应用于低空飞行的无人机。
通过传感器和相机的联合作用,可以完成无人机的自主导航和路径规划,实现地面遥感和环境监测等任务。
三、星图匹配技术的发展趋势随着航空航天技术的不断发展,星图匹配技术也在不断进化和改进。
如今,一些新兴技术已经被广泛应用到星图匹配中。
比如说,深度学习技术将被用于提高星图匹配的识别精度,以及选择与现有星图的匹配成功率更高的新星图。
此外,在航空器设计方面,星图匹配技术还将结合三维成像技术和激光测量技术,实现更为高效和精确的姿态控制。
同时,在地球观测方面,星图匹配技术也将借助云计算和大数据技术,处理大量的卫星遥感数据和气象数据,以实现更准确的预测和分析。
飞行器姿态控制系统设计及仿真
飞行器姿态控制系统设计及仿真近年来,随着无人机技术的快速发展,飞行器姿态控制系统的设计和仿真成为了一个备受关注的领域。
飞行器姿态控制系统是无人机飞行过程中保持稳定的重要组成部分,它能够通过精确的姿态控制来实现飞行器的稳定飞行和各种机动动作。
本文将介绍飞行器姿态控制系统的设计原理和步骤,并通过仿真验证其性能。
一、飞行器姿态控制系统的设计原理飞行器姿态控制系统的设计原理主要基于控制理论和传感器技术。
控制理论提供了一种系统动力学建模和控制器设计的理论基础,而传感器技术能够提供准确的姿态信息,为控制系统提供反馈信号。
在飞行器姿态控制系统设计中,常用的控制方法包括PID控制和模型预测控制。
PID控制是一种经典的控制方法,通过测量当前状态与目标状态的误差,综合考虑比例、积分和微分三个部分,计算出控制输出。
模型预测控制则是基于飞行器的数学模型,通过预测未来一段时间内的状态变化,计算出最优的控制策略,从而实现姿态控制。
二、飞行器姿态控制系统的设计步骤1. 系统动力学建模飞行器姿态控制系统的设计首先需要进行系统动力学建模。
根据飞行器的物理特性和运动方程,建立数学模型。
常见的模型包括刚体模型、欧拉角模型和四元数模型。
选择合适的模型能够更好地描述飞行器的运动特性。
2. 控制器设计根据系统模型,选择适当的控制方法进行控制器设计。
常用的控制方法有PID控制和模型预测控制。
PID控制是一种简单而有效的方法,但对于复杂的飞行器姿态控制来说,模型预测控制能够提供更好的性能。
根据系统的需求和性能指标,设计合适的控制器参数。
3. 传感器选择飞行器姿态控制系统需要依赖传感器来获取准确的姿态信息。
常用的传感器包括加速度计、陀螺仪和磁力计等。
根据飞行器的需求和环境条件,选择合适的传感器,并进行校准和数据处理,以提供准确的姿态反馈。
4. 闭环控制设计好控制器和选择好传感器后,将其组合成一个闭环控制系统。
将传感器获取的姿态信息与目标姿态进行比较,计算出控制输出,通过执行机构来实现姿态控制。
图象匹配导航
地形匹配导航:
• 单纯的地形数据不能提供地理坐标位臵,匹配导航必须与其他导航方式进行 组合,如地形/惯性组合导航,就是由惯性导航系统提供地理位臵信息,利用 地形匹配修正惯性导航的误差,以提高定位精度。 • 地形匹配导航辅助导航系统主要由以下硬件设备组成: • 惯性导航系统,提供全部导航信息; • 无线电高度表,提供真实高度; • 气压式高度表或大气数据系统,提供绝对高度; • 导航计算机和大容量存储器,进行匹配计算和存放数字地图。 • 其中高度表、大气数据系统等仪表系统为导航系统提供所需的数据,而并非 在导航系统中另采用一套。 • 在一维的地形匹配导航中,地形跟踪是主要的飞行方式,它由大气数据系统 提供绝对高度,由无线电高度表探测航路上的真实高度,绝对高度减真实高 度得到地形高度,沿飞行航迹的地形高度序列数据组成了高度实时图。将实 时图与存储的数字地图按一定的算法进行数据处理,找出原图中与实时图最 为接近的区域,则这个区域就是飞行器估计的地理位臵,地形/惯性组合导航 系统根据这个估计值去修正惯性导航系统的指示误差。匹配算法是相当复杂 的,它对计算机由很高的要求。一般讲,实时图与原图几乎找不到完全一致 的区域,通常是以一定的误差范围来判断匹配的接近程度,满足所要求的误 差精度,就认为达到了匹配,原图中的相应位臵既飞行器当时的地理位臵。 • 利用地形匹配导航可以使飞行器进行地形跟踪,保持一定的真实高度。也可 利用数字地图中相同地形高度进行地形回避飞行,绕过高山,在山谷中穿行。 地形跟踪和地形回避是军用飞机低空突防的隐蔽飞行方式,并可保证低空飞 行的安全高度
导航原理:
• 预先将飞行器经过的地域,通过大地测量、航空摄影、卫星摄影或已有的地 形图等方法将地型数据(主要是地形位臵和高度数据)制作成数字化地图, 储存在飞行器的计算机中,这种地图称为原图。飞行器在飞越已经数字化的 预定空域时,其上的探测设备再次对该区域进行测量(录取),取得实际的 地表特征图像,将实时图与预先存储的原图进行比较,由此可以确定飞行器 实际飞行的地理位臵与标准位臵的偏差,用以对飞行器进行导航。 • 图像匹配导航可分为地形匹配导航和景象匹配导航两种。 • 地形匹配导航是以地形高度轮廓为匹配特征,通常用无线电高度表测量沿航 迹的高度数据,与预先获得的航道上的区域地形数据比较,若不一致,表明 偏离了预定的飞行航迹。这种方式时一维匹配导航,适合于山丘地形的飞行。 • 景象匹配导航是以一定匹配的地表特征,采用摄像等图像成像装臵录取飞行 轨迹周围或目标附近地区地貌,与存储在飞行器上的原图比较,进行匹配导 航。景象匹配属于二维匹配导航,可以确定飞行器两个坐标的偏差,适合于 平坦地区导航。
飞行器自主导航的研究与应用
飞行器自主导航的研究与应用飞行器自主导航是机器人科技的一个代表性应用,是现代工程技术的典型之一。
在飞行器自主导航方面,计算机视觉、恒星导航传感器、惯性导航、卫星导航、激光雷达和视觉惯导等多种技术相互融合,可以实现多种环境下的无人飞行。
随着飞行器自主导航技术不断发展,其在军事、民用、商业等领域的应用也日益广泛。
一、飞行器自主导航技术1、计算机视觉技术计算机视觉技术是飞行器自主导航中最为核心的技术之一。
它利用特定的算法对图像进行分析、处理、识别,进而实现对飞行器的自主导航控制。
计算机视觉技术主要应用于图像处理、目标跟踪、姿态估计、环境感知等方面。
2、恒星导航传感器技术恒星导航传感器技术利用星光的位置信息来获取飞行器的航向和姿态,用于进行精确的导航和定位。
目前主要采用的恒星导航传感器是光电式恒星传感器,它可以通过感应星光的位置来获取飞行器的位置信息和姿态信息。
3、惯性导航技术惯性导航技术是以加速度计和微型陀螺仪为主要部件的,用于获取飞行器的动态信息。
惯性导航系统可以测量飞行器的加速度、角速度和姿态信息,进而计算出飞行器的速度、位移和姿态变化。
在其它导航传感器信号受干扰或者无信号的情况下,惯性导航可以独立地提供较为精确的位置信息。
4、卫星导航技术卫星导航技术是基于卫星发射的信号进行自主导航的一种技术。
全球卫星定位系统(GNSS)是卫星导航技术中最为常见的技术之一,由全球定位系统(GPS)、伽利略和格洛纳斯三大卫星定位系统组成。
卫星导航技术可以在开阔空间或者地表开阔区域中提供较好的定位和导航服务。
5、激光雷达技术激光雷达技术是一种高精度三维雷达技术,用于获取飞行器周围环境与障碍物的信息。
激光雷达利用光脉冲的回波来检测目标位置,并用其反射时间计算出目标的距离、位置、速度和方向等信息。
二、飞行器自主导航应用1、军事领域飞行器自主导航应用最早起源于军事领域,其中的典型应用是无人飞行器(HUD)。
HUD 不仅可以执行侦察、侦察和侦察任务,还可进行空中打击和指挥战斗机等高敏感任务。
飞行器自主导航的传感和定位技术实验

飞行器自主导航的传感和定位技术实验无人机自主导航是目前航空领域的一项重要技术。
传感器和定位系统在飞行器自主导航中起着关键作用。
本文将介绍飞行器自主导航的传感和定位技术的实验研究,包括传感器选择、定位算法和实验设计等方面的内容。
在飞行器自主导航中,传感器的选择非常重要。
常用的传感器包括惯性测量单元(IMU)、全球定位系统(GPS)、激光雷达、摄像头等。
惯性测量单元提供了飞行器的姿态、加速度和角速度等信息,是飞行器导航的基础。
GPS系统可以提供准确的位置和速度信息,但在室内或高层建筑物附近的环境中可能信号不稳定。
激光雷达可以实现对周围环境的三维建模和障碍物检测,可以辅助飞行器进行位置和姿态估计。
摄像头则可以用于图像处理和目标识别,可以在飞行器自主导航中提供更多的环境信息。
为了实现准确的飞行器自主导航,需要使用适当的定位算法。
目前常用的定位算法包括惯性导航、视觉定位和基于特征点的定位等。
惯性导航是一种基于IMU的定位方法,利用飞行器的姿态、加速度和角速度等信息来推测其位置和速度。
虽然惯性导航具有实时性强的优点,但受到积分漂移等问题的影响,需要不断校正。
视觉定位是一种基于摄像头的定位方法,通过分析摄像头捕捉到的图像信息,如地标、特征点等,来推测飞行器的位置和姿态。
基于特征点的定位是一种利用激光雷达等传感器对周围环境进行建模,并通过匹配特征点来计算飞行器位置的方法。
在实验研究中,需要设计合理的实验方案来验证飞行器自主导航的传感和定位技术。
首先,需要确定实验的目标和指标,如飞行器的定位精度、响应时间等。
然后,选择合适的实验场景和环境,如室内、室外、夜间等,以模拟实际使用中的不同条件。
接下来,设计实验过程,包括飞行器的起飞、导航过程以及降落等。
在实验过程中,收集传感器和定位系统的数据,并与实际位置进行对比和校准,评估定位算法的准确性和可靠性。
最后,根据实验结果进行数据分析和算法优化,提高飞行器自主导航的性能。
基于图像识别的室内定位与导航系统

基于图像识别的室内定位与导航系统室内定位与导航系统在日常生活中具有广泛的应用前景。
本文基于图像识别技术,探讨了室内定位与导航系统的原理和实现方法。
通过对室内环境中的图像进行处理和分析,可以实现对人物和物体的识别,从而实现精准的定位和导航功能。
本文通过对相关技术进行深入研究,并结合实际案例进行分析,展示了基于图像识别的室内定位与导航系统在实际应用中所取得的成果。
1. 引言随着人们生活水平提高和科技进步,人们对于室内环境中精准定位和导航需求日益增加。
传统的GPS定位在室内环境下存在精度不高、信号不稳定等问题。
而基于图像识别技术的室内定位与导航系统可以通过对环境中的图像进行处理和分析,从而实现精准且稳定地确定人物或物体位置,并提供相应的导航功能。
2. 图像处理与分析2.1 图像获取室内定位与导航系统需要获取室内环境的图像数据。
可以使用摄像头、激光雷达等设备进行图像采集。
采集到的图像数据可以通过图像处理算法进行预处理,提取出关键信息。
2.2 特征提取通过对采集到的图像进行特征提取,可以获取到环境中的关键特征点。
这些特征点可以是室内物体的边缘、角点等。
通过对这些特征点进行分析和匹配,可以实现对人物和物体的定位。
2.3 图像识别算法在室内定位与导航系统中,需要使用一些图像识别算法来实现对人物和物体的识别。
常用的算法包括模板匹配、边缘检测、角点检测等。
这些算法可以根据实际需求选择合适的方法来实现。
3. 定位与导航系统设计3.1 定位算法设计在基于图像识别技术的室内定位与导航系统中,需要设计一种精准且稳定地定位算法来确定人物或物体位置。
该算法应考虑到环境中可能存在遮挡、光照变化等因素,并能够在复杂环境下实现高精度的定位。
3.2 导航算法设计定位算法确定了人物或物体的位置后,需要设计一种导航算法来实现路径规划和导航功能。
该算法应考虑到路径的安全性和效率性,能够根据实时环境变化进行动态调整。
4. 实际应用案例4.1 商场导航系统商场是一个复杂且庞大的室内环境,人们在其中往往会感到迷失。
一种基于卫星图像匹配的无人机自主定位算法

航天返回与遥感第42卷第2期130SPACECRAFT RECOVERY & REMOTE SENSING2021年4月一种基于卫星图像匹配的无人机自主定位算法刘欣1吴俊娴2张占月1(1 航天工程大学,北京 101416)(2 空装驻北京地区第一军事代表室,北京 100854)摘要针对基于图象匹配的无人机自主定位易失效的问题,文章提出了一种基于卫星图像辅助的由粗到精的无人机自主定位框架。
首先设计了一种CNN-LSTM联合分类器,利用CNN网络抽取图像特征的优势,结合无人机图像时间维度上的连续性,实现无人机图像与卫星基准图像的区域匹配;然后从匹配后的区域提取同名点,结合光学成像的共线约束,设计了一种基于多点加权约束的无人机自主定位算法。
试验结果表明提出的算法鲁棒性好、精度高,适合用于无人机自主定位。
关键词无人机自主定位卷积神经网络图像匹配加权最小二乘估计遥感应用中图分类号: V279文献标志码: A 文章编号: 1009-8518(2021)02-0130-09DOI: 10.3969/j.issn.1009-8518.2021.02.015A UA V Autonomous Positioning Algorithm Based onSatellite Image MatchingLIU Xin1 WU Junxian2 ZHANG Zhanyue1(1 Space Engineering University, Beijing 101416, China)(2 The 1th Military Office in Beijing, Equipment Department of PLA Air Force, Beijing 100854, China)Abstract For the problem that autonomous positioning of UAVs based on image matching is easily invalid, the paper proposed a coarse-to-fine autonomous UAV positioning framework based on the assist by satellite images. Firstly, a CNN-LSTM joint classifier is designed to achieve regional matching between UAV image and satellite reference image, utilizing the advantage of CNN network to extract image features and combining with the continuity of UAV image in time dimension. Then, an autonomous UAV positioning algorithm based on multi-point weighted constraints is designed by extracting points of the same name from the matched region and combining with the collinear constraint of optical imaging. The experimental results show that this proposed algorithm is suitable for UAV autonomous positioning with good robustness and high precision.Keywords unmanned aerial vehicle (UA V); autonomous positioning; convolutional neural network; image matching; weighted least square estimation; remote sensing application0 引言无人机在执行任务时首先要解决的问题是确定自身在工作环境中的准确位置。
视觉导航系统中的目标识别与定位技术

视觉导航系统中的目标识别与定位技术摘要:视觉导航系统中的目标识别与定位技术是一种基于图像处理的技术,用于识别和定位导航系统中的目标物体。
本文将介绍视觉导航系统中常用的目标识别与定位技术,并讨论它们的应用和未来发展。
引言:随着无人机、自动驾驶车辆、机器人等应用的快速发展,视觉导航系统的需求日益增长。
目标识别与定位技术作为视觉导航系统的核心组成部分,能够帮助导航系统实现环境感知和路径规划。
本文将以视觉导航系统为背景,介绍目标识别与定位技术的基本原理、常用方法及其应用领域。
一、目标识别技术目标识别技术是指通过对图像或视频进行分析,将感兴趣的目标从背景中区分出来。
常见的目标识别方法包括模板匹配、特征提取与匹配以及深度学习方法。
1. 模板匹配:模板匹配是一种基于像素级别相似度的目标识别方法。
它通过将待识别目标与预先定义的模板进行比较,找到最相似的位置。
该方法的优点是计算简单,但对光照、变形等因素较为敏感。
2. 特征提取与匹配:特征提取与匹配是一种基于局部特征的目标识别方法。
它通过提取图像中的角点、边缘等特征信息,并将其与数据库中的特征进行匹配。
该方法具有较好的鲁棒性,但对目标物体的旋转、尺度变化较为敏感。
3. 深度学习方法:深度学习方法是近年来发展起来的一种目标识别技术。
它通过构建深层神经网络模型,学习从原始图像到目标标签的映射关系。
与传统方法相比,深度学习方法在目标识别的准确性和鲁棒性方面取得了显著的进展。
二、目标定位技术目标定位技术是指通过计算目标物体在图像上的位置信息,实现对目标物体的定位。
常见的目标定位方法包括边界框回归、关键点定位和姿态估计等。
1. 边界框回归:边界框回归是一种基于目标外框的目标定位方法。
它通过对图像中目标物体的外框进行回归,得到目标的位置信息。
该方法简单快速,适用于目标物体边界明显的情况。
2. 关键点定位:关键点定位是一种基于目标内部关键点的目标定位方法。
它通过检测目标物体的关键点,如人脸的眼睛、鼻子等,计算目标的位置信息。
STK飞行器路径规划与仿真
STK飞⾏器路径规划与仿真系统⼯具包(System Tool Kit)是由美国Analytical Graphics(AGI)公司开发的⼀款在航空航天仿真领域处于领先地位的商业分析软件。
作为航天⼯业领域先进的可视化分析软件,其逼真的场景仿真效果、精确地分析结果获得了众多专家学者的认可,在航空、航天、地⾯模拟以及其他复杂任务中发挥着越来越重要的作⽤。
STK中提供了四个进⾏飞⾏器路径规划的⽅式:ØGreat ArcØSTK ExternalØAircraft Mission Modeler——本次汇报重点ØReal TimeAMM任务规划准备在飞⾏器属性设置选项“基本-路径-propagator”中选择“Mission Modeler Aircraft”。
此外,需要在属性中进⾏⼀些设置,以保证仿真呈现最佳效果。
场景属性中的设置:在“基本-时间-动画”选项中,设置合理仿真时间步长;在“基本-单位”选项中,单位设置为英尺;在“3D图像-全球属性-地球参考⾯”⼀栏中,将参考⾯设置为海平⾯。
在3D图像窗⼝属性浏览器中的设置:在“细节-地图细节”⼀栏中,勾选“显⽰国际省际线”;在“光线”页,关闭所有光线设置。
在场景中插⼊飞⾏器之后,需要选择对应的飞⾏器类型。
选择飞⾏器的⽅法分为以下三种⽅式:Ø选择STK软件模型库提供的飞⾏器模型。
Ø选择修改后的飞⾏器模型。
Ø⾃⾏导⼊飞⾏器数据。
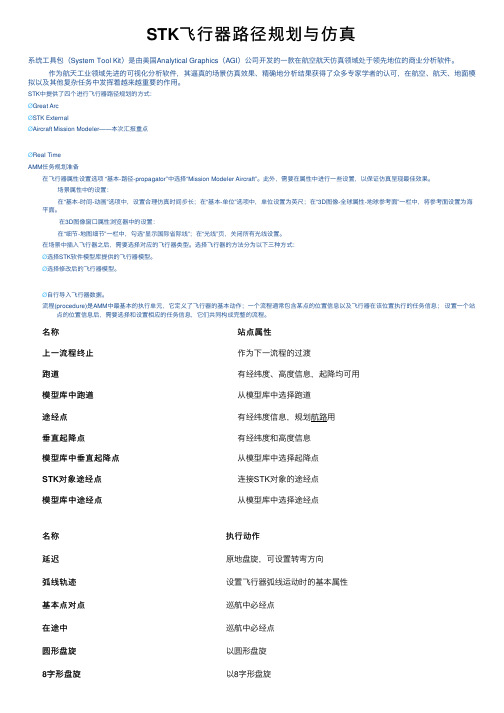
流程(procedure)是AMM中最基本的执⾏单元,它定义了飞⾏器的基本动作;⼀个流程通常包含某点的位置信息以及飞⾏器在该位置执⾏的任务信息;设置⼀个站点的位置信息后,需要选择和设置相应的任务信息,它们共同构成完整的流程。
名称站点属性上⼀流程终⽌作为下⼀流程的过渡跑道有经纬度、⾼度信息,起降均可⽤模型库中跑道从模型库中选择跑道途经点有经纬度信息,规划航路⽤垂直起降点有经纬度和⾼度信息模型库中垂直起降点从模型库中选择起降点STK对象途经点连接STK对象的途经点模型库中途经点从模型库中选择途经点名称执⾏动作延迟原地盘旋,可设置转弯⽅向弧线轨迹设置飞⾏器弧线运动时的基本属性基本点对点巡航中必经点在途中巡航中必经点圆形盘旋以圆形盘旋8字形盘旋以8字形盘旋跑道型盘旋以跑道状盘旋地形跟踪贴地飞⾏阶段(phase)是⽐流程⾼⼀级的执⾏单元:Ø⼀个阶段内可以插⼊好⼏个流程Ø阶段之后还可以插⼊阶段Ø不同的阶段可以设置飞⾏器的不同性能,从⽽共同构成⼀个完整的任务。
无人机景象匹配辅助导航仿真系统设计与实现
无人机景象匹配辅助导航仿真系统设计与实现
李耀军;潘泉;沈贺;张绍武;凌志刚
【期刊名称】《火力与指挥控制》
【年(卷),期】2011(036)007
【摘要】景象匹配导航技术以其自主性强,定位精度高,抗电子干扰的优势逐渐成为未来无人机平台最主要辅助导航方式之一.采用基于边缘响应加权Hausdorff距离景象匹配算法作为仿真系统的核心匹配算法,利用小波多分辨分析技术对模拟实时图进行预处理,将改进的蚁群算法用于航迹规划,运用遗传算法的快速搜索优势进行景象匹配定位,构建出无人机平台景象匹配导航仿真系统.该仿真系统可模拟无人机的真实工作环境,并为无人机平台景象匹配导航的设计与开发提供技术支持.
【总页数】5页(P114-118)
【作者】李耀军;潘泉;沈贺;张绍武;凌志刚
【作者单位】西北工业大学自动化学院,西安 710072;西北工业大学自动化学院,西安 710072;西北工业大学自动化学院,西安 710072;西北工业大学自动化学院,西安710072;西北工业大学自动化学院,西安 710072
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于TMS320DM642的无人机景象匹配辅助导航系统构建 [J], 冯胜民;梁彦;赵春晖;曲圣杰
2.基于空间关系几何约束的无人机景象匹配导航 [J], 李耀军;潘泉;赵春晖;张绍武;凌志刚
3.基于X-Plane的小型无人机导航仿真系统的分布式设计与实现 [J], 王建锋;李荣冰;刘建业;于永军
4.基于局部精确直方图匹配的无人机景象匹配导航色彩恒常算法 [J], 靳珍璐;潘泉;赵春晖;魏妍妍;马娟娟
5.重力辅助惯性导航可视化仿真系统设计与实现 [J], 何英;蔡体菁
因版权原因,仅展示原文概要,查看原文内容请购买。
飞行模拟机组合导航系统建模与仿真的开题报告

飞行模拟机组合导航系统建模与仿真的开题报告一、开题背景随着航空事业的发展,飞行模拟技术也逐渐走进人们的视野。
将真实飞行场景通过计算机技术进行模拟,使得飞行员能够在模拟中进行飞行操作,提高其飞行技能和对特定飞机型号的理解程度。
其中,组合导航系统作为飞行模拟技术中的一个重要组成部分,其模型建立和仿真分析具有重要意义。
二、研究意义针对组合导航系统的建模和仿真,具体意义如下:1. 提升飞行模拟器的可信度和准确度:在飞行模拟器中,组合导航系统是飞行员进行自主导航的关键系统之一。
通过建立组合导航系统的模型和仿真分析,可以大大提升飞行模拟器的可信度和准确度,更好地服务于飞行员的培训和训练工作。
2. 探索组合导航系统性能的影响因素:组合导航系统的性能对于飞机的导航及定位精度至关重要。
通过建立组合导航系统的模型和仿真分析,可以深入探索影响组合导航系统性能的因素,为进一步提升组合导航系统的性能提供科学依据。
3. 推动飞行模拟技术的发展:飞行模拟技术是现代飞行培训和训练的重要手段,然而其发展仍然存在诸多挑战和困难。
通过组合导航系统建模和仿真,可以推动飞行模拟技术的发展和创新,为飞行培训和训练提供更加高效和优质的服务。
三、研究内容和方法本文主要研究内容为组合导航系统的建模和仿真分析。
具体研究方法如下:1. 组合导航系统的建模:根据组合导航系统的结构和工作原理,建立相应的数学模型,并将各子系统进行整合和联通,形成完整的组合导航系统模型。
2. 组合导航系统的仿真:针对组合导航系统的模型,通过MATLAB等仿真软件进行仿真分析,得出组合导航系统的性能指标和特性,并对其进行定量分析。
3. 实际数据验证:采用实际飞行数据进行验证,并比较分析仿真结果和实际数据的一致性和差异性,验证组合导航系统模型的可靠性和有效性。
四、预期成果和成果应用1.预期成果:通过组合导航系统建模和仿真分析,得出组合导航系统的性能指标和特性,并对其进行定量分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
() 1 7
一
口l 6
1( 6 + b3 x)
a6 2
。 熹 = + l 3 ( c’ 一 3 Zc ) J
=
0(2 一1 n ) 2 口 (2 一 n 1) 3 口(2 一1 4 a (2 1) 5 Ⅱ(2 n ) n一 n 一1 6 ) 口 (2 n) 2 0(2 ) 3 n Ⅱ (2 n) 4
n t v i b e e p o o e n ag r h b s d o p ca a d r n oma in frp e ie p st n n f i r t o al l ,w r p s d a l o i m a e n s e i l n ma k if r t r c s o i o i g o r a .Us — a a t l o o i a cf e i g t e i g no main o a t u a a d r n t e t e a r o e c me a i g ln n h ma e if r t fa p r c lr ln mak o h h i r a r ma e p a e,a d t r u h t e i g o i bn n h o g h ma e ta so ma in,ma c i g p st n a d c o dn ts ta so a in,t re—dme so a a r p c o r i a e n rnfr t o t h n o i o n o r i ae r n f r t i m o he i n i n l c me a s a e c o d n t s a d t r e a t u e a ge r rc c ltd h e t t d n l swee a u ae .Ac o d n h a so ai n r lt n o a r n i r tb d o r iae i l c r i g t t e t n fr t ea i fc me a a d ar a o y c o d n t o r m o o cf s se y t m,t e p e ie lc t n o i r tw sc l r t d h r cs o ai far a a ai a e .Co u e i lt n w sc rid o t o v l a e te a g r h , o cf b mp trsmu a i a are u a i t h lo i m o t d t a d t e rs l h w a h rp s d ag rt m a aif h e u r me t o h n e r td n vg t n a c r c o n h e u t s o t t e p o o e oi s h t l h c ns t yterq i s e ns ft e i tg ae a ia i c u a y f r o
W ANG n a g, UN ua -x n Mi -g n S Ch n i
( ol eo s o at sN r w s r oy cncl nvri , i nSa x 7 07 , h a C l g f t nui ot et nP lt h i i sy X ' hn i 10 2 C i ) e Ar c h e e aU e t a n
【 l 1 , 寺[( X +3 ) c 一s] 一 s b — +3 Z) ) ( (
() 6
消去 比例 因子得 :
r 1~ + Y 丽 一 f aA )1— + z ( 置 b sc s X ( )1 ) (
l 口 (
2
一 )+6 ( — )+c ( 一z ) 2 2 s
口: = ( +Y 2 【 。) 1 专。 n 口 3
: =
=
8(2 ) 5
飞行器 的位姿估计算 法 , 取得 了 良好 的效果 ¨ 。 3 ]
2 飞行 器精 确 定位原 理
利用机载摄像 机得到地面特定 地标 的实时 图像 , 与数 据 库相应点 的图像信 息通过 图像 匹配 实现飞行 器 的精 确定位 。
在飞行器飞行航迹 内 . 选择 图像 特征较易辨认 的 N组特定 地 标 , 建立其坐标 、 字高 程数 据库 。飞行 器进 入特 定地 标 并 数
8 ~ 6
机空 间三维坐标 和三个 姿态 角 。根 据摄像 机坐 标 系与机 体
l 音 l A X +l ) cZ— s】 。X —s 6 一 +l A Z ( ) ( ( )
{ f
一
1
y - n( 一 s +6( — )+ 2Z —Z )】 i [2 - X ) 2 c( A s
ABS TRACT :n o d rt e o v h o g e d r n e a rr f S NS e r rc re t n p o lm ,wh n t e GP in l i I r e o r s l e t e ln - n u a c ‘ i a t I ro o r ci r b e c o e h S s a s g
() 7
一 ,
j
[[ [ 薹 ] , ] =薹[ = 三 c
l 2 j ls 。 。 。 s cZ 。 ・ ox。 J
上式 为中心投影 构像 方程式 。又称 共线 条件 方程 式 。
该 公 式 的示 意 图如 图 1
图 1 共 线 方 程 示 意 图
机体坐标系的变换关系 , 推算飞行器精确位置 。通过计算机仿真对算法进行 了验证 , 结果表 明 , 出的算 法能够 满足 G S 提 P 不 可用时长航的飞行器组合导航精度要求 , 研究结果对长航时飞行器导航具有一定借 鉴和参 考价值 。
关键词 : 飞行器 ; 图像匹配 ; 精确定位 ; 组合导航
H gn和 H yral 出了在 不使 用 I S 况下 , 图像位 置 ae aedh 提 N情 用 量 测结 合数字 高程地 图进 行 飞行 器定 位 [ 。美 国 N V Y 1 ] A SS 公 司开发了一种 C S 惯性/ P/ 图像组合 系统—— G — y , 发 I E e研 出一种视频校正技术并应 用在 C S 惯性/ P/ 图像 传感 器 中, 使
第2卷 第5 9 期
文章编号 :0 6 9 4 (0 2 0 — 0 6 0 10 — 3 8 2 1 ) 5 0 8 — 4
计
算
机
仿
真
21年5 0 2 月
基 于 图像 匹配 的飞 行 器 导 航 定 位 算 法 及 仿 真
王 民 钢 . 传 新 孙
( 西北工业大学航天学 院 , 陕西 西安 7 0 7 ) 10 2 摘要 : 在飞行器导航定位优化控制的研究 中, 针对无法获得 G S信号时 , P 长航时 飞行器捷联惯 导系统存在 误差 , 出了关于 提 图像 地标 的飞行 器精确 定位算法 , 为实现成像系统对捷联惯导系统的误差校正奠定 了基础 。利用特定地标 在机载摄像 机像 平 面上的图像信 息 , 通过图像 变换 、 匹配定位 、 坐标变换 , 解算摄 像机空间三维坐标和三个 姿态角 。再根 据摄像机坐标 系与
E
() 5
暖
一
87 一
o 2_ o x z
O x
一
,—
Xs
一
Xs
]
假 如观测了 n个像点 , 则可列 出 2 个误差 方程式 , 表示
成矩阵形式 为 :
V = A —L X
( 6 1)
】
一— 叫 一= c , 专
= =
= 【 , VIV2v2 J y,x z…
f =0( l —X)+ ly—Y)+ lz—Z) s b( s c( s
{ 口( X) b 1 l) c z— s () Y= 2 x— + 2 , , + 2 Z) 9 (一s (
l z=口( 一 )+b( 3 3Y—Y) 3z—Z ) s +c( s
则共线方程可表示 为 :
() 8
( ,y ) ( )为 函数 近似值 ; X 、 、Z 、 、 、 为 待 d d d s咖 幽
求的外方位元素修正数 , 它们的系数 为函数的偏 导数 , 令
圈
= b cIl ( 1 Y I 22 4 口 2 l ) 儿Z J
一
『 -
c ] -
1 引 言
飞 行 器 ( n n e ei e ie U V) 称 “ 中机 器 U mandA r l hc , A 又 aV l 空
其 即使在 C S信 息连续丢 失 的情 形下 也可 以维 持高 精江大 学李 阳 、 浙 李平 等选 择 了微
所在 区域 时 , 利用 飞行器 上安 装 的成像 系统 跟踪 地标 , 进 并
基 金项 目: 天科技创 新基 金( A C 0 9 2 航 C S 20 0 ) 收稿 t期 :0 1 0 — 5 3 2 1— 7 2
—
行拍摄 。根据数据库 信息 , 利用特 定地标 在摄像 机像平 面上 的图像 信息 , 过 图像 变换 、 通 匹配定位 、 坐标变 换 , 解算摄 像
小 型飞行器视觉 系统作 为研究方 向, 就地标 识别 和位姿估计 展开 了具体研究 , 在此基础上设计并 实现 了一个 飞行器视 觉 系统应用程序 , 实现 了微型 飞行 器对人工 地标 的 自动识别 和
人 ” 可应用 于场区监控 、 , 气象 探测 、 路巡视 、 探测绘 、 公 勘 水 灾监 视 、 航空摄 影 、 交通管 理 、 电力线 路查巡 、 林火灾 防救 森 等。 飞行器 基于 图像 的组 合 导航 的相关 研究 主要集 中在 基 于图像 的运动 估计 (m g — ae oi smao ,B I ae bsd M tn Et t n IME) o i i 方面, 国外也 有不 少学 者将 I M B E引入 到 飞行 器导 航 系统 ,