ABB机器人程序指令汇总
ABB机器人常用指令详解-中文

ABB常用指令详解-中文ABB常用指令详解-中文一、简介及背景ABB是一种先进的自动化设备,具有广泛的应用领域。
本文档将详细介绍ABB常用指令,帮助用户快速了解和掌握的操作技巧和功能。
二、基础指令1.MOVE指令:用于控制的移动,包括直线和旋转方向的移动。
2.SPEED指令:设置的运动速度。
3.HOME指令:将恢复到初始位置。
4.STOP指令:停止的运动。
5.PAUSE指令:暂停的运动,可以手动恢复。
6.WT指令:等待指定条件满足后再继续执行下一步指令。
三、高级指令1.ROBOT指令:控制的工作模式,包括自动模式和示教模式。
2.PROGRAM指令:创建、编辑和运行的程序。
3.CALL指令:调用其他程序或子程序。
4.IF指令:根据条件执行不同的操作。
5.FOR指令:循环执行一系列指令。
6.WHILE指令:在条件满足的情况下重复执行一系列指令。
四、IO指令1.SET指令:设置的输入输出状态。
2.READ指令:读取的输入输出状态。
3.WTIO指令:等待的输入输出状态满足指定条件后再继续执行。
五、系统指令1.DATE指令:获取或设置的日期。
2.TIME指令:获取或设置的时间。
3.ERROR指令:获取或清除的错误信息。
4.POSITION指令:获取当前的位置信息。
5.TOOL指令:设置或校准的工具。
6.SPEEDLIMIT指令:设置的速度限制。
六、附件本文档涉及附件如下:1.附件1:ABB常用指令示例程序2.附件2:ABB常用指令使用手册七、法律名词及注释1.:指能够自动执行任务的可编程设备。
2.指令:语句或命令,用于控制的操作。
3.输入输出(IO):用于与外部设备之间的数据传输和通信。
4.程序:包含一系列指令的有序集合。
5.条件:一种逻辑判断,用于根据不同的情况执行不同的操作。
6.工具:所用的工作设备。
ABB机器人标准指令详解-2018

p10,外轴不动。
p20,外轴联动 track_motion。
p30,外轴联动 orbit_a。
限制: 不能在指令 StorePath …RestoPath 内使用。 不能在预置程序 RESTART 内使用。
2024/8/6
计数指令
Add Incr
Clear Decr
2024/8/6
计数指令-Add
Override:机器人运行速率 %。 ( num ) Max: 最大运行速度 mm/s。 ( num )
应用: 对机器人运行速度进行限制,机器人运动指 令中均带有运行速度,在执行运动速度控制 指令 VelSet 后,实际运行速度为运动指令规 定的运行速度乘以机器人运行速率,并且不 超过机器人最大运行速度,系统默认值为 VelSet 100, 5000; 。
实例:
Incr reg1;
等同于
reg1:=reg1+1;
2024/8/6
计数指令-Decr
Decr Name;
Name: 数据名称。
( num )
应用:
在一个数字数据值上增加 1,可以用赋值指 令替代,一般用于产量计数。
实例:
Decr reg1;
等同于
p10,外轴不动。
p20,外轴联动 track_motion。
p30,外轴联动 orbit_a。
限制: 不能在指令 StorePath …RestoPath 内使用。 不能在预置程序 RESTART 内使用。 不能在机器人转轴处于独立状态时使用。
2024/8/6
外轴激活指令-DeactUnit
外轴激活指令-ActUnit
实例:
MoveL p10,v100,fine,tool1; ActUnit track_motion; MoveL p20,v100,z10,tool1; DeactUnit track_motion; ActUnit orbit_a; MoveL p30,v100,z10,tool1;
ABB机器人标准指令详解
运动控制指令-PathResol
限制: 机器人必须在完全停止后才能更改路径控制
值,否则,机器人将默认一个停止点,并且 显示错误信息 50146。 机器人正在更改路径控制值时,机器人被强 制停止运行,机器人将不能立刻恢复正常运 行 ( Restart )。 以下情况机器人将自动恢复默认值 100%。 机器人冷启动。 系统载入新的程序。 程序重置 ( Start From Beginning )。
外轴激活指令
ActUnit
DeactUnit
2024/2/8
外轴激活指令-ActUnit
ActUnit MecUnit;
MecUnit:
外轴名。
( mecunit )
应用:
将机器人一个外轴激活,例如:当多个外轴 公用一个驱动板时,通过外轴激活指令 ActUnit 选择当前所使用的外轴。
2024/2/8
外轴激活指令-ActUnit
实例:
MoveL p10,v100,fine,tool1; ActUnit track_motion; MoveL p20,v100,z10,tool1; DeactUnit track_motion; ActUnit orbit_a; MoveL p30,v100,z10,tool1;
SoftDeact [\Ramp];
[\Ramp]: 软化坡度,>=100%。 ( num )
应用: 当前指令用于使软化机器人主机或外轴伺服 系统指令 SoftAct 失效。
实例:
SoftAct 3,20; SoftDeact; SoftAct 1,90; SoftDeact\Ramp:=150;
2024/2/8
限制:
机器人被强制停止运行后,软伺服设置将自 动失效。
第三部分:ABB机器人程序流程指令
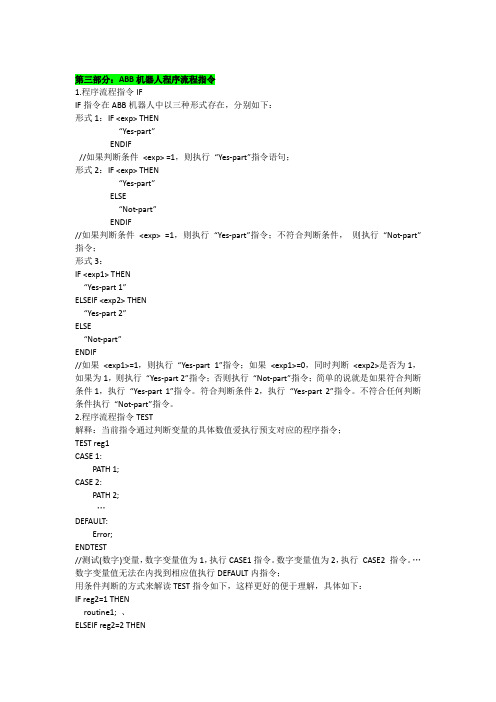
第三部分:ABB机器人程序流程指令1.程序流程指令IFIF指令在ABB机器人中以三种形式存在,分别如下:形式1:IF <exp> THEN“Yes-part”ENDIF//如果判断条件<exp> =1,则执行“Yes-part”指令语句;形式2:IF <exp> THEN“Yes-part”ELSE“Not-part”ENDIF//如果判断条件<exp> =1,则执行“Yes-part”指令;不符合判断条件,则执行“Not-part”指令;形式3:IF <exp1> THEN“Yes-part 1”ELSEIF <exp2> THEN“Yes-part 2”ELSE“Not-part”ENDIF//如果<exp1>=1,则执行“Yes-part 1”指令;如果<exp1>=0,同时判断<exp2>是否为1,如果为1,则执行“Yes-part 2”指令;否则执行“Not-part”指令;简单的说就是如果符合判断条件1,执行“Yes-part 1”指令。
符合判断条件2,执行“Yes-part 2”指令。
不符合任何判断条件执行“Not-part”指令。
2.程序流程指令TEST解释:当前指令通过判断变量的具体数值爱执行预支对应的程序指令;TEST reg1CASE 1:PATH 1;CASE 2:PATH 2;…DEFAULT:Error;ENDTEST//测试(数字)变量,数字变量值为1,执行CASE1指令。
数字变量值为2,执行CASE2 指令。
…数字变量值无法在内找到相应值执行DEFAULT内指令;用条件判断的方式来解读TEST指令如下,这样更好的便于理解,具体如下:IF reg2=1 THENroutine1; 、ELSEIF reg2=2 THENroutine2;ELSEIF reg2=3 THENroutine3;ELSEIF reg2=4 THENroutine4;ELSEError;ENDIF3.程序循环指令:WHILE解读:就是判断WHILE后面的条件是否满足条件,如果满足,则执行DO后面的内容,否则就结束ENDWHILE;实例:reg1:=1;WHILE reg1< 5 DOreg1:=reg1+1;ENDWHILE//循环至不符合判断条件reg1 < 5,才执行以后的ENDWHILE指令。
ABB机器人实际应用总结归纳中的指令说明

ABB机器人实际应用总结归纳中的指令说明(一)ABB机器人指令
1、JOINT指令:Joint指令是ABB机器人操作中最基本的指令,它用
来控制ABB机器人的运动。
Joint指令不仅要求用户指定机器人的力矩,
还要求用户指定机器人的关节转动角度以及机器人到达目标位置的时间。
2、POS指令:Pos指令用来控制ABB机器人在空间位置上的运动,以
及机器人的末端位置。
Pos指令要求用户指定机器人到达目标位置的速度,机器人的最大运动速度,机器人的到达目标位置的最短时间。
3、LINE指令:Line指令用来控制ABB机器人沿一条直线路径的运动。
Line指令要求用户指定机器人运动的起点和终点,以及机器人的最大运
动速度和到达目标位置的最短时间。
4、CYCLE指令:Cycle指令用来控制ABB机器人同一条轨迹多次运动
的指令,可以设置循环次数,指定循环运动的参数,如运动速度,运动的
起始点和终点,以及机器人的到达目标位置的最短时间。
5、WAIT指令:Wait指令用来控制ABB机器人暂停一段时间,在
Wait指令中,用户可以指定暂停时间的长短,也可以指定机器人在暂停
时间内运动的参数,如运动速度等。
6、IF指令:If指令用来控制ABB机器人在满足特定条件时执行特定
操作。
ABB机器人常用指令详解-中文(一)
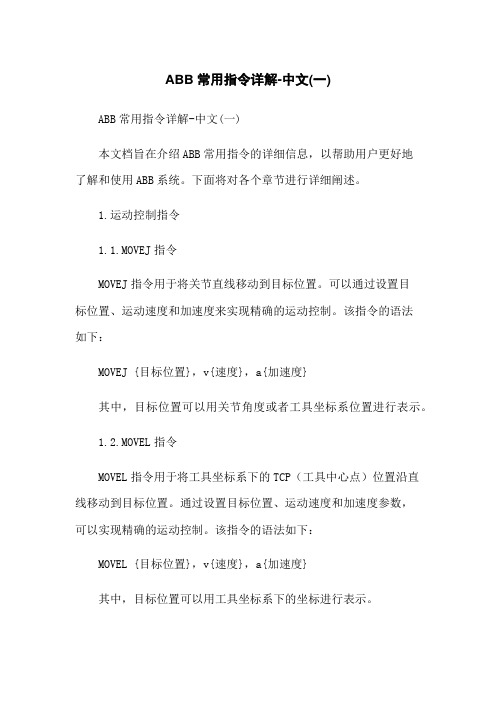
ABB常用指令详解-中文(一)ABB常用指令详解-中文(一)本文档旨在介绍ABB常用指令的详细信息,以帮助用户更好地了解和使用ABB系统。
下面将对各个章节进行详细阐述。
1.运动控制指令1.1.MOVEJ指令MOVEJ指令用于将关节直线移动到目标位置。
可以通过设置目标位置、运动速度和加速度来实现精确的运动控制。
该指令的语法如下:MOVEJ {目标位置},v{速度},a{加速度}其中,目标位置可以用关节角度或者工具坐标系位置进行表示。
1.2.MOVEL指令MOVEL指令用于将工具坐标系下的TCP(工具中心点)位置沿直线移动到目标位置。
通过设置目标位置、运动速度和加速度参数,可以实现精确的运动控制。
该指令的语法如下:MOVEL {目标位置},v{速度},a{加速度}其中,目标位置可以用工具坐标系下的坐标进行表示。
1.3.MOVEC指令MOVEC指令用于沿一条圆弧轨迹将点A移动到点B。
可通过设置起始点和终点的TCP位置,沿圆弧轨迹实现精确的运动控制。
该指令的语法如下:MOVEC {起始点TCP位置},{终点TCP位置},v{速度},a{加速度}2.系统控制指令2.1.SPEED指令SPEED指令用于设置运动的速度和加速度参数。
可以通过设置关节速度、坐标系速度和时间倍率三个参数来控制的运动速度。
该指令语法如下:SPEED v{速度},a{加速度},t{时间倍率}2.2.SETDO指令SETDO指令用于设置数字输出口的状态。
可以通过该指令将数字输出口的状态设置为高(1)或低(0)。
该指令的语法如下:SETDO x{数字输出口号},{状态}2.3.SETTOOL指令SETTOOL指令用于设置工具坐标系。
可以通过该指令将工具坐标系的原点和方向设置为指定的TCP位置。
该指令的语法如下:SETTOOL p{x},{y},{z},{q0},{q1},{q2},{q3}3.数据处理指令3.1.WT指令WT指令用于暂停程序的执行,直到满足指定的条件。
ABB机器人标准指令详解
ABB机器人标准指令详解一、 RAPID程序控制指令1、1程序开始/结束控制指令1) PROGRAM START/END1、指令格式: PROGRAM <程序名> <属性> ;2、描述:此指令标识一个机器人程序的开始或结束。
在这里,<程序名>是你给程序取的名字,<属性>是可选的,表示程序的属性(如:INTERLOCK, NO_INTERLOCK, NOPROGRAM等)。
2) JOB START/END1、指令格式: JOB <作业名> <属性> ;2、描述:此指令标识一个作业的开始或结束。
在这里,<作业名>是你给作业取的名字,<属性>是可选的,表示作业的属性(如:INTERLOCK, NO_INTERLOCK, NOPROGRAM等)。
1、2程序转移指令1) GOTO1、指令格式: GOTO <行号>;2、描述:此指令将程序执行转移到指定的行号。
2) GOSUB1、指令格式: GOSUB <行号>;2、描述:此指令将程序执行转移到指定的行号,并在返回时继续执行当前行。
3) RETURN1、指令格式: RETURN;2、描述:此指令将程序执行从 GOSUB转移到父程序,并从 GOTO转移到原程序行。
1、3条件判断指令1) IF/THEN/ELSE/ENDIF;1、指令格式: IF <条件> THEN <表达式> ELSE <表达式> ENDIF;2、描述:如果满足条件<条件>,则执行 THEN后面的表达式;否则执行 ELSE后面的表达式。
2) CASE/ESAC/ENDCASE;1、指令格式: CASE <变量> IN <表达式1> / <表达式2> /... / ENDCASE;2、描述:此指令根据变量<变量>的值选择要执行的表达式。
ABB机器人常用指令详解-中文(一)
ABB常用指令详解-中文(一)ABB常用指令详解-中文(一)1、介绍本文档详细介绍了ABB常用指令的使用方法和注意事项。
通过学习本文档,您将能够熟练使用ABB进行各种操作和编程。
2、指令列表2.1 运动指令2.1.1 MOVJ指令:用于指定关节间的跳跃式运动。
2.1.2 MOVL指令:用于指定关节间的连续式运动。
2.1.3 MOVC指令:用于指定末端执行器的圆弧路径运动。
2.1.4 MOVPT指令:用于指定末端执行器的直线和圆弧路径运动。
2.1.5 BACKUP指令:用于将退回到指定位置。
2.1.6 UPDATE指令:用于更新当前位置。
2.2 条件指令2.2.1 IF指令:用于根据某一条件执行不同的指令。
2.2.2 WHILE指令:用于在某一条件满足时重复执行一段指令。
2.2.3 WT指令:用于等待条件满足后再继续执行下一条指令。
2.3 数学指令2.3.1 ADD指令:用于将两个数相加。
2.3.2 SUB指令:用于将两个数相减。
2.3.3 MUL指令:用于将两个数相乘。
2.3.4 DIV指令:用于将两个数相除。
3、指令使用示例3.1 MOVJ指令使用示例3.1.1 指令格式:MOVJjoint_1_pos,joint_2_pos,joint_3_pos,joint_4_pos,joint_5_pos ,joint_6_pos3.1.2 示例:MOVJ 0,0,90,0,0,03.2 MOVL指令使用示例3.2.1 指令格式:MOVL x_pos,y_pos,z_pos,rz,ry,rz3.2.2 示例:MOVL 100,200,300,0,0,04、注意事项4.1 安全操作注意事项4.1.1 在操作时,请确保周围没有其他人员,以免发生意外伤害。
4.1.2 在进行编程前,请确保电源已关闭,并进行必要的安全检查。
4.2 指令使用注意事项4.2.1 在使用任何运动指令前,请确保当前位置与设定位置相符,避免发生运动错误。
ABB常用指令总结
ABB常用指令总结
1、TRS:手动编程操作指令,可以操作ABB机器人进行实时编程。
2、MOVJ:按照指定速度运动执行关节轴移动指令。
3、MOVL:按照指定速度运动执行末端移动指令。
4、MOVC:按照指定速度运动执行路径跟踪指令。
5、SETV:设置机器人的速度和加速度参数指令。
6、WAIT:等待指令,可以指定机器人在其中一状态下等待。
7、INPUT:输入口指令,可以定义机器人的输入口状态。
8、OUTPUT:输出口指令,可以定义机器人的输出口状态。
9、IF:条件控制指令,可以定义机器人在一定条件下执行不同指令。
10、ELSE:可以定义机器人在一定条件下执行不同指令,如果条件不
成立,则执行ELSE后的指令。
11、ENDIF:条件控制指令,本指令后就结束IF-ELSE结构体中的指令。
12、FOR:循环控制指令,可以定义其中一序列指令重复执行的次数。
13、NEXT:循环控制指令,本指令后就结束FOR结构体中的指令。
14、STOP:停止指令,可以立即停止机器人的运动或程序的执行。
15、ADD:程序连接指令,可以将多个程序连接在一起以执行。
16、SUB:子程序调用指令,可以调用已经定义的子程序。
17、CALL:子程序调用指令,可以调用已经定义的子程序。
18、JMP:跳转指令。
ABB机器人程序指令全集

ABB机器人程序指令全集一指令格式二指令及其参数Data := ValueAccSet Acc RampActUnit MecUnitAdd Name A ddValueBreakCallBy Var Name NumberClear NameClkReset ClockClkStart ClockClkStop ClockClose IODevice! CommentConfJ [\On] | [\Off]ConfL [\On] | [\Off]CONNECT Interrupt WITH Trap routineCorrCon DescrCorrDiscon DescrCorrWrite Descr DataCorrClearDeactUnit MecUnitDecr NameEOffsSet EaxOffs ErrWrite [ \W ] Header Reason[ \RL2] [ \RL3] [ \RL4]ExitExitCycleFOR Loop counter FROM S tart value TO End value [STEP Step value] DO ... ENDFORGOTO L abelGripLoad LoadIDelete InterruptIF Condition ...IF Condition THEN ...{ELSEIF Condition THEN ...}[ELSE ...]ENDIFIncr NameIndAMove MecUnit Axis [ \ToAbsPos ] | [ \ToAbsNum ]Speed[ \Ramp ]IndCMove MecUnit Axis Speed [ \Ramp ]IndDMove MecUnit Axis Delta Speed [ \Ramp ]IndReset MecUnit Axis [ \RefPos ] | [ \RefNum ] |[ \Short ] | [ \Fwd ] |[ \Bwd ] | [ \Old ]IndRMove MecUnit Axis [ \ToRelPos ] | [ \ToRelNum ] |[ \Short ] |[ \Fwd ] | [ \Bwd ] Speed [ \Ramp ]InvertDO SignalIODisable UnitName MaxTimeIOEnable UnitName MaxTimeISignalDI [ \Single ] Signal TriggValueInterruptISignalDO [ \Single ] Signal TriggValueInterruptISleep Interrupt ITimer [ \Single ] Time InterruptIVarValue VarNo Value, InterruptIWatch InterruptLabe l:MoveAbsJ [ \Conc ] ToJointPos Speed [ \V ] | [ \T ] Zone[ \Z]Tool[\WObj ]MoveC [ \Conc ] CirPoint ToPoint Speed [ \V ] | [ \T ] Zone [ \Z]Tool [\WObj ]MoveJ [ \Conc ] ToPoint Speed [ \V ] | [ \T ] Zone [ \Z ] Tool[ \WObj ]MoveL [ \Conc ] ToPoint Speed [ \V ] | [ \T ] Zone [ \Z ] Tool[ \WObj ]Open Object [\File] IODevice [\Read] | [\Write] | [\Append] | [\Bin]PathResol ValuePDispOn [ \Rot ] [ \ExeP ] ProgPoint Tool [ \WObj ]PDispSet DispFramePulseDO [ \PLength ] SignalRAISE [ Error no ]Reset SignalRETURN [ Return value ]Rewind IODeviceSearchC [ \Stop ] | [ \PStop ] | [ \Sup ] Signal SearchPoint CirPointToPoint Speed [ \V ] | [ \T ] Tool [ \WObj ]SearchL [ \Stop ] | [ \PStop ] | [ \Sup ] Signal SearchPoint ToPointSpeed [ \V ] | [ \T ] Tool [ \WObj ]Set SignalSetAO Signal Value SetDO [ \SDelay ] Signal ValueSetGO Signal ValueSingArea [ \Wrist] | [ \Arm] | [ \Off]SoftAct Axis Softness [\Ramp ]Stop [ \NoRegain ]TEST Test data {CASE Test value {, Test valu e} : ...}[ DEFAULT: ...] ENDTESTTPReadFK Answer String FK1 FK2 FK3 FK4 FK5 [\MaxTime][\DIBreak] [\BreakFlag]TPReadNum Answer String [\MaxTime] [\DIBreak] [\BreakFlag] TPShow WindowTPWrite String [\Num] | [\Bool] | [\Pos] | [\Orient]TriggC CirPoint ToPoint Speed [ \T ] Trigg_1 [ \T2 ][ \T3 ][ \T4]Zone Tool [ \WObj ]TriggInt TriggData Distance [ \Start ] | [ \Time ] InterruptTriggIO TriggData Distance [ \Start ] | [ \Time ] [ \DOp ] | [ \GOp ]|[\AOp ] SetValue [ \DODelay ] | [ \AORamp ]TriggJ ToPoint Speed [ \T ] Trigg_1 [ \T2 ] [ \T3] [ \T4]Zone Tool [ \WObj]TriggL ToPoint Speed [ \T ] Trigg_1 [ \T2] [ \T3] [ \T4]Zone Tool[ \WObj ]TuneServo MecUnit Axis TuneValueTuneServo MecUnit Axis TuneValue [\Type]UnLoad FilePath [\File]VelSet Override MaxWaitDI Signal Value [\MaxTime] [\TimeFlag]WaitDO Signal Value [\MaxTime] [\TimeFlag]WaitTime [\InPos] Time WaitUntil [\InPos] Cond [\MaxTime] [\TimeFlag]WHILE Condition DO ... ENDWHILEWrite IODevice String [\Num] | [\Bool] | [\Pos] |[\Orient][\NoNewLine]WriteBin IODevice Buffer NCharWriteStrBin IODevice StrWZBoxDef [\Inside] | [\Outside] Shape LowPoint HighPointWZCylDef [\Inside] | [\Outside] Shape CentrePoint RadiusWZDisable WorldZoneWZDOSet [\Temp] | [\Stat] WorldZone [\Inside] | [\Before] Signal SetValueWZEnable WorldZoneWZFree WorldZoneWZLimSup [\Temp] | [\Stat] WorldZone ShapeWZSphDef [\Inside] | [\Outside] Shape CentrePoint Radius 三函数及其参数Abs (Input)ACos (Value)AOutput (Signal)ArgName (Parameter)ASin (Value)ATan (Value)ATan2 (Y X)ByteToStr (ByteData [\Hex] | [\Okt] | [\Bin] | [\Char]) ClkRead (Clock) CorrReadCos (Angle)CPos ([Tool] [\WObj])CRobT ([Tool] [\WObj])DefDFrame (OldP1 OldP2 OldP3 NewP1 NewP2 NewP3) DefFrame (NewP1 NewP2 NewP3 [\Origin])Dim (ArrPar DimNo)DOutput (Signal)EulerZYX ([\X] | [\Y] | [\Z] Rotation)Exp (Exponent)GOutput (Signal)GetTime ( [\WDay] | [\Hour] | [\Min] | [\Sec] ) IndInpos MecUnit AxisIndSpeed MecUnit Axis [\InSpeed] | [\ZeroSpeed] IsPers (DatObj)IsVar (DatObj)MirPos (Point MirPlane [\WObj] [\MirY]) NumToStr (Val Dec [\Exp])Offs (Point XOffset YOffset ZOffset)OrientZYX (ZAngle YAngle XAngle)ORobT (OrgPoint [\InPDisp] | [\InEOffs]) PoseInv (Pose)PoseMult (Pose1 Pose2)PoseVect (Pose Pos)Pow (Base Exponent) Present (OptPar)ReadBin (IODevice [\Time])ReadMotor [\MecUnit ]AxisReadNum (IODevice [\Time])ReadStr (IODevice [\Time])RelTool (Point Dx Dy Dz [\Rx] [\Ry] [\Rz])Round ( Val [\Dec])Sin (An gl e )Sqrt (Value)StrFind (Str ChPos Set [\NotInSet])StrLen (Str)StrMap ( Str FromMap ToMap)StrMatch (Str ChPos Pattern)StrMemb (Str ChPos Set)StrOrder ( Str1 Str2 Order)StrPart (Str ChPos Len)StrToByte (ConStr [\Hex] | [\Okt] | [\Bin] | [\Char]) StrToVal ( Str Val )Tan (Angle)TestDI (Signal)Trunc ( Val [\Dec] )ValToStr ( Val )欢迎您的下载,资料仅供参考!致力为企业和个人提供合同协议,策划案计划书,学习资料等等打造全网一站式需求。
ABB机器人程序指令汇总
11ABB机器人程序指令汇总。
一指令格式[此处图片未下载成功]二指令及其参数Data := ValueAccSet Acc RampActUnit MecUnitAdd Name A ddValueBreakCallBy Var Name Number Clear NameClkReset ClockClkStart ClockClkStop ClockClose IODevice! CommentConfJ [] | []ConfL [] | []CONNECT Interrupt WITH Trap routineCorrCon DescrCorrDiscon DescrCorrWrite Descr DataCorrClearDeactUnit MecUnitDecr NameEOffsSet EaxOffs ErrWrite [ ] Header Reason [ ] [ ] [ ]ExitExitCycleFOR Loop counter FROM S tart value TO End value [STEP Step value] DO ... ENDFORGOTO L abelGripLoad LoadIDelete InterruptIF Condition ...IF Condition THEN ...ELSEIF Condition THEN ...[ELSE ...]Incr NameIndAMove MecUnit Axis [ ] | [ ]Speed[ ]IndCMove MecUnit Axis Speed [ ]IndDMove MecUnit Axis Delta Speed [ ]IndReset MecUnit Axis [ ] | [ ] | [ ] | [ ] |[ ] | [ ] IndRMove MecUnit Axis [ ] | [ ] | [ ] |[ ] | [ ] Speed [ ] InvertDO SignalIODisable UnitName MaxTimeIOEnable UnitName MaxTimeISignalDI [ ] Signal TriggValueInterruptISignalDO [ ] Signal TriggValueInterruptISleep Interrupt ITimer [ ] Time InterruptIVarValue VarNo Value, InterruptIWatch InterruptLabe l:MoveAbsJ [ ] ToJointPos Speed [ ] | [ ] Zone[ ]Tool[ ]MoveC [ ] CirPoint ToPoint Speed [ ] | [ ] Zone [ ]Tool [ ]MoveJ [ ] ToPoint Speed [ ] | [ ] Zone [ ] Tool[ ]MoveL [ ] ToPoint Speed [ ] | [ ] Zone [ ] Tool[ ]Open Object [] IODevice [] | [] | [] | [] PathResol ValuePDispOn [ ] [ ] ProgPoint Tool [ ]PDispSet DispFramePulseDO [ ] SignalRAISE [ Error no ]Reset SignalRETURN [ Return value ]Rewind IODeviceSearchC [ ] | [ ] | [ ] Signal SearchPoint CirPoint ToPoint Speed [ ] | [ ] Tool [ ]SearchL [ ] | [ ] | [ ] Signal SearchPoint ToPoint Speed [ ] | [ ] Tool [ ]Set SignalSetAO Signal Value SetDO [ ] SignaxxValueSetGO Signal ValueSingArea [ ] | [ ] | [ ]SoftAct Axis Softness []Stop [ ]TEST Test data CASE Test value , Test valu e : ... [ DEFAULT: ...] ENDTEST TPReadFK Answer String FK1 FK2 FK3 FK4 FK5 [] [] []TPReadNum Answer String [] [] []TPShow WindowTPWrite String [] | [] | [] | []TriggC CirPoint ToPoint Speed [ ] Trigg_1 [ ][ ][ ]Zone Tool [ ]TriggInt TriggData Distance [ ] | [ ] InterruptTriggIO TriggData Distance [ ] | [ ] [ ] | [ ]|[] SetValue [ ] | [ ]TriggJ ToPoint Speed [ ] Trigg_1 [ ] [ ] [ ]Zone Tool [ ] TriggL ToPoint Speed [ ] Trigg_1 [ ] [ ] [ ]Zone Tool[ ] TuneServo MecUnit Axis TuneValueTuneServo MecUnit Axis TuneValue []UnLoad FilePath []VelSet Override MaxWaitDI Signal Value [] []WaitDO Signal Value [] []WaitTime [] Time WaitUntil [] Cond [] []WHILE Condition DO ... ENDWHILEWrite IODevice String [] | [] | [] |[][]WriteBin IODevice Buffer NCharWriteStrBin IODevice StrWZBoxDef [] | [] Shape LowPoint HighPointWZCylDef [] | [] Shape CentrePoint RadiusWZDisable WorldZoneWZDOSet [] | [] WorldZone [] | [] Signal SetValueWZEnable WorldZoneWZFree WorldZoneWZLimSup [] | [] WorldZone ShapeWZSphDef [] | [] Shape CentrePoint Radius 三函数及其参数Abs (Input)ACos (Value)AOutput (Signal)ArgName (Parameter)ASin (Value)ATan (Value)ATan2 (Y X)ByteToStr (ByteData [] | [] | [] | []) ClkRead (Clock) CorrRead Cos (Angle)CPos ([Tool] [])CRobT ([Tool] [])DefDFrame (OldP1 OldP2 OldP3 NewP1 NewP2 NewP3) DefFrame (NewP1 NewP2 NewP3 []) Dim (ArrPar DimNo)DOutput (Signal)EulerZYX ([] | [] | [] Rotation)Exp (Exponent)GOutput (Signal)GetTime ( [] | [] | [] | [] ) IndInpos MecUnit AxisIndSpeed MecUnit Axis [] | [] IsPers (DatObj)IsVar (DatObj)MirPos (Point MirPlane [] []) NumToStr (Val Dec [])Offs (Point XOffset YOffset ZOffset)OrientZYX (ZAngle YAngle XAngle)ORobT (OrgPoint [] | []) PoseInv (Pose)PoseMult (Pose1 Pose2)PoseVect (Pose Pos)Pow (Base Exponent) Present (OptPar) ReadBin (IODevice [])ReadMotor []AxisReadNum (IODevice [])ReadStr (IODevice [])RelTool (Point Dx Dy Dz [] [] []) Round ( Val [])Sin (An gl e )Sqrt (Value)StrFind (Str ChPos Set [])StrLen (Str)StrMap ( Str FromMap ToMap) StrMatch (Str ChPos Pattern) StrMemb (Str ChPos Set)11 StrOrder ( Str1 Str2 Order)StrPart (Str ChPos Len)StrToByte (ConStr [] | [] | [] | []) StrToVal ( Str Val )Tan (Angle)TestDI (Signal)Trunc ( Val [] )ValToStr ( Val )1。
ABB机器人常用指令详解
ABB机器人常用指令详解关键信息项:1、指令名称:____________________2、指令功能:____________________3、适用场景:____________________4、参数设置:____________________5、示例代码:____________________11 移动指令111 MoveL 指令MoveL 指令用于线性移动机器人的工具中心点(TCP)到指定的目标位置。
它以直线方式移动,确保路径是一条直线。
指令格式:MoveL ToPoint, Speed, Zone参数说明:ToPoint:目标位置的坐标。
Speed:移动速度。
Zone:逼近和离开目标位置的过渡区域大小。
112 MoveJ 指令MoveJ 指令用于关节运动,机器人以最快的速度将工具中心点移动到目标位置。
指令格式:MoveJ ToPoint, Speed, Zone参数说明:ToPoint:目标位置的关节角度。
Speed:移动速度。
Zone:逼近和离开目标位置的过渡区域大小。
12 输入输出指令121 SetDO 指令SetDO 指令用于设置数字输出信号的值。
指令格式:SetDO Signal, Value参数说明:Signal:要设置的数字输出信号的名称。
Value:设置的值,通常为 0 或 1。
122 WaitDI 指令WaitDI 指令用于等待数字输入信号达到指定的值。
指令格式:WaitDI Signal, Value, Timeout参数说明:Signal:要等待的数字输入信号的名称。
Value:期望的信号值。
Timeout:等待的超时时间,如果在超时时间内未达到指定值,则程序继续执行。
13 逻辑指令131 IF 指令IF 指令用于根据条件执行不同的操作。
指令格式:IF Condition THEN Statements ELSE Statements ENDIF 参数说明:Condition:判断条件。
ABB机器人高级编程指令

ActUnit orbit_a; MoveL p30,v100,z10,tool1;
P30,外軸聯動
限製﹕
Orbit_a
不能在指令StorePath…RestorePath內使用
不能在預置程序RESTART內使用
2024/8/6
計數指令
Add Incr
2024/8/6
Clear Decr
計數指令-Add
PathSampleTime : 路徑控制% (num)
應用﹕ 當前指令用於更改機器人主機系統參數;
調整機器人路徑采樣時間﹐從而達到控制 機器人運行路徑的效果﹐通過此指令可以 提高機器人運動精度或縮短循環時間﹐路 徑控制默認值為100%﹐調整範圍為25%-400% 路徑控制百分比越小﹐運動精度越高﹐占用 CPU資源也越多
不能在指令StorePath…RestorePath內使用
不能在預置程序RESTART內使用
不能在機器人轉軸處於獨立狀態時使用
2024/8/6
外軸激活指令-DeactUnit
DeactUnit MecUnit
MecUnit:
外軸名 (mecunit)
應用﹕
將機器人一個外軸失效﹐例如﹕當多個外 軸公用一個驅動板時﹐通過外軸激活指令 DeactUnit使當前所使用的外軸失效﹔
VelSet ConfL PathReasol SoftDeact
2024/8/6
运动控制指令-AccSet
AccSet Acc,Ramp; Acc:机器人加速度百分率(num) Ramp:机器人加速度坡度(num) 应用﹕ 当机器人运行速度改变时﹐对所产生的相 应加速度进行限制﹐使机器人高速运行时 更平缓﹐但会延长循环时间﹐系统默认值 为﹕AccSet 100,100;
ABB机器人程序指令汇总

一指令格式二指令及其参数Data := ValueAccSet Acc RampActUnit MecUnitAdd Name AddValueBreakCallBy Var Name NumberClear NameClkReset ClockClkStart ClockClkStop ClockClose IODevice! CommentConfJ [\On] | [\Off]ConfL [\On] | [\Off]CONNECT Interrupt WITH Trap routineCorrCon DescrCorrDiscon DescrCorrWrite Descr DataCorrClearDeactUnit MecUnitDecr NameEOffsSet EaxOffs ErrWrite [ \W ] Header Reason [ \RL2] [ \RL3] [ \RL4]ExitExitCycleFOR Loop counter FROM Start value T O End value [STEP Step value] DO ... ENDFORGOTO LabelGripLoad LoadIDelete InterruptIF Condition ...IF Condition THEN ...{ELSEIF Condition THEN ...}[ELSE ...]ENDIFIncr NameIndAMove M ecUnit Axis [ \ToAbsPos ] | [ \ToAbsNum ] Speed[ \Ramp ] IndCMove M ecUnit Axis Speed [ \Ramp ]IndDMove M ecUnit Axis Delta Speed [ \Ramp ]IndReset MecUnit Axis [ \RefPos ] | [ \RefNum ] | [ \Short ] | [ \Fwd ] |[ \Bwd ] | [ \Old ]IndRMove MecUnit Axis [ \ToRelPos ] | [ \ToRelNum ] | [ \Short ] |[ \Fwd ] | [ \Bwd ] Speed [ \Ramp ]InvertDO SignalIODisable UnitName MaxTimeIOEnable UnitName MaxTimeISignalDI [ \Single ] Signal TriggValue InterruptISignalDO [ \Single ] Signal TriggValue InterruptISleep Interrupt ITimer [ \Single ] Time Interrupt IVarValue VarNo Value, InterruptIWatch InterruptLabe l:MoveAbsJ [ \Conc ] ToJointPos Speed [ \V ] | [ \T ] Zone [ \Z]Tool [\WObj ]MoveC [ \Conc ] CirPoint ToPoint Speed [ \V ] | [ \T ] Zone [ \Z]Tool [ \WObj ]MoveJ [ \Conc ] ToPoint Speed [ \V ] | [ \T ] Zone [ \Z ] Tool[ \WObj ] MoveL [ \Conc ] ToPoint Speed [ \V ] | [ \T ] Zone [ \Z ] Tool[ \WObj ] Open Object [\File] IODevice [\Read] | [\Write] | [\Append] | [\Bin] PathResol ValuePDispOn [ \Rot ] [ \ExeP ] ProgPoint Tool [ \WObj ]PDispSet DispFramePulseDO [ \PLength ] SignalRAISE [ Error no ]Reset SignalRETURN [ Return value ]Rewind IODeviceSearchC [ \Stop ] | [ \PStop ] | [ \Sup ] Signal SearchPoint CirPoint ToPoint Speed [ \V ] | [ \T ] Tool [ \WObj ]SearchL [ \Stop ] | [ \PStop ] | [ \Sup ] Signal SearchPoint ToPoint Speed [ \V ] | [ \T ] Tool [ \WObj ]Set SignalSetAO Signal Value SetDO [ \SDelay ] Signal ValueSetGO Signal ValueSingArea [ \Wrist] | [ \Arm] | [ \Off]SoftAct Axis Softness [\Ramp ]Stop [ \NoRegain ]TEST Test data {CASE Test value {, Test valu e} : ...}[ DEFAULT: ...] ENDTESTTPReadFK Answer String FK1 FK2 FK3 FK4 FK5 [\MaxTime] [\DIBreak] [\BreakFlag]TPReadNum Answer String [\MaxTime] [\DIBreak] [\BreakFlag] TPShow WindowTPWrite String [\Num] | [\Bool] | [\Pos] | [\Orient]TriggC CirPoint ToPoint Speed [ \T ] Trigg_1 [ \T2 ] [ \T3 ][ \T4] Zone Tool [ \WObj ]TriggInt TriggData Distance [ \Start ] | [ \Time ] InterruptTriggIO TriggData Distance [ \Start ] | [ \Time ] [ \DOp ] | [ \GOp ] |[\AOp ] SetValue [ \DODelay ] | [ \AORamp ]TriggJ ToPoint Speed [ \T ] Trigg_1 [ \T2 ] [ \T3] [ \T4]Zone Tool [ \WObj] TriggL ToPoint Speed [ \T ] Trigg_1 [ \T2] [ \T3] [ \T4]Zone Tool[ \WObj ] TuneServo MecUnit Axis TuneValueTuneServo MecUnit Axis TuneValue [\Type]UnLoad FilePath [\File]VelSet Override MaxWaitDI Signal Value [\MaxTime] [\TimeFlag]WaitDO Signal Value [\MaxTime] [\TimeFlag]WaitTime [\InPos] Time WaitUntil [\InPos] Cond [\MaxTime] [\TimeFlag] WHILE Condition DO ... ENDWHILEWrite IODevice String [\Num] | [\Bool] | [\Pos] | [\Orient][\NoNewLine] WriteBin IODevice Buffer NCharWriteStrBin IODevice StrWZBoxDef [\Inside] | [\Outside] Shape LowPoint HighPoint WZCylDef [\Inside] | [\Outside] Shape CentrePoint Radius WZDisable WorldZoneWZDOSet [\Temp] | [\Stat] WorldZone [\Inside] | [\Before] Signal SetValueWZEnable WorldZoneWZFree WorldZoneWZLimSup [\Temp] | [\Stat] WorldZone ShapeWZSphDef [\Inside] | [\Outside] Shape CentrePoint Radius三函数及其参数Abs (Input)ACos (Value)AOutput (Signal)ArgName (Parameter)ASin (Value)ATan (Value)ATan2 (Y X)ByteToStr (ByteData [\Hex] | [\Okt] | [\Bin] | [\Char]) ClkRead (Clock) CorrReadCos (Angle)CPos ([Tool] [\WObj])CRobT ([Tool] [\WObj])DefDFrame (OldP1 OldP2 OldP3 NewP1 NewP2 NewP3) DefFrame (NewP1 NewP2 NewP3 [\Origin])Dim (ArrPar DimNo)DOutput (Signal)EulerZYX ([\X] | [\Y] | [\Z] Rotation)Exp (Exponent)GOutput (Signal)GetTime ( [\WDay] | [\Hour] | [\Min] | [\Sec] )IndInpos MecUnit AxisIndSpeed MecUnit Axis [\InSpeed] | [\ZeroSpeed]IsPers (DatObj)IsVar (DatObj)MirPos (Point MirPlane [\WObj] [\MirY])NumToStr (Val Dec [\Exp])Offs (Point XOffset YOffset ZOffset)OrientZYX (ZAngle YAngle XAngle)ORobT (OrgPoint [\InPDisp] | [\InEOffs])PoseInv (Pose)PoseMult (Pose1 Pose2)PoseVect (Pose Pos)Pow (Base Exponent) Present (OptPar)ReadBin (IODevice [\Time])ReadMotor [\MecUnit ]AxisReadNum (IODevice [\Time])ReadStr (IODevice [\Time])RelTool (Point Dx Dy Dz [\Rx] [\Ry] [\Rz])Round ( Val [\Dec])Sin (An gl e )Sqrt (Value)StrFind (Str ChPos Set [\NotInSet])StrLen (Str)StrMap ( Str FromMap ToMap)StrMatch (Str ChPos Pattern)StrMemb (Str ChPos Set)StrOrder ( Str1 Str2 Order)StrPart (Str ChPos Len)StrToByte (ConStr [\Hex] | [\Okt] | [\Bin] | [\Char])StrToVal ( Str Val ) Tan (Angle) TestDI (Signal) Trunc ( Val [\Dec] ) ValToStr ( Val )。
ABB机器人常用指令详解

ABB常用指令详解1、ABB常用指令详解在ABB编程中,常用指令是必须掌握的内容。
本文将详细介绍ABB常用指令,并提供示例代码和相关说明,以帮助读者更好地理解和应用这些指令。
1.1 移动指令1.1.1 PTP(Point-to-Point)指令PTP指令用于使从当前位置直接移动到指定的目标位置。
该指令可在关节坐标系和工具坐标系下使用。
以下是一个示例代码:PTP P1, v100, z50, TCP1解释:- PTP:移动指令的类型。
- P1:目标位置的类型,可以是关节坐标或工具坐标。
- v100:移动速度,100表示100%的速度。
- z50:运动轴向的位置,50表示50mm。
- TCP1:工具坐标系,默认值为TCP1.1.1.2 LIN(Linear)指令LIN指令用于使沿直线轨迹从当前位置移动到指定的目标位置。
以下是一个示例代码:LIN P2, v200, z100, TCP2解释:- LIN:移动指令的类型。
- P2:目标位置的类型,可以是关节坐标或工具坐标。
- v200:移动速度,200表示200%的速度。
- z100:运动轴向的位置,100表示100mm。
- TCP2:工具坐标系。
1.2 程序控制指令1.2.1 IF-ELSE指令IF-ELSE指令用于根据条件执行不同的操作。
以下是一个示例代码:IF cond1 THENPTP P3, v150, z200, TCP3ELSEPTP P4, v100, z150, TCP4ENDIF解释:- IF cond1 THEN:如果条件cond1满足,则执行下一行的操作。
- PTP P3, v150, z200, TCP3:目标位置的移动指令。
- ELSE:如果条件cond1不满足,则执行下一行的操作。
- PTP P4, v100, z150, TCP4:另一个目标位置的移动指令。
- ENDIF:指示IF-ELSE语句块的结束。
1.2.2 WHILE指令WHILE指令用于循环执行一段代码,直到指定条件不满足为止。
ABB机器人程序指令汇总

ABB机器人程序指令汇总
一、IRProgram
1. IRProgram:使用此指令编程ABB机器人。
2. Instruction:此指令可以向机器人发送指令,包括按单次命令执行、循环执行、运动等。
3. ProgramLine:此指令设置机器人单次操作步骤的顺序,机器人按
此顺序执行指令。
4. Position:此指令确定机器人的实际位置,用来计算机器人的路
径或者运动距离。
5. Interpln:此指令用来控制机器人运动的过渡,比如采用加速度、减速度等。
6. Zonedheader:此指令定义机器人任务中的一些步骤,比如,给定
回归点、给定回归方向等。
7. Maskword:此指令用于设置机器人的安全模式,以防止机器人偏
离设定的轨迹和安全路径。
8. Stop:此指令用于控制机器人的停止。
9. Echo:此指令用于在编程过程中显示一段文字,方便开发人员从
错误中记录错误信息。
二、IRStep
2. Line:此指令可以定义任务中各个行动的顺序,机器人按此顺序
执行指令。
3. Move:此指令可以让机器人运动到指定位置。
4. Delay:此指令可以让机器人暂停其中一段时间,等待其中一种情况出现。
5. Add:此指令可用于给机器人添加各种参数,以完成不同的任务。
6. Subtract:此指令用于从机器人中减去参数,以完成任务。
ABB机器人常用指令总结

ABB机器人常用指令总结1. ProgramName:用户可以将编程的名称指定为ProgramName,该指令将定义当前编程的名称,例如,ProgramName=正在编程的程序名称示例。
2. Create: Create指令有三个补充部分,第一个部分是模式,要么用“INC”表示自动增量模式,要么用“TEACH”表示立体机械手模式,第二部分是程序号,第三部分是将要执行的程序号命令,例如,Create INC ProgramName 。
3. Add:当用户使用立体机械手模式编程时,使用Add相应指令添加新的点位,Add指令如下:Add [PointName] x y z a b c。
4. Move:用来控制机械手移动位置到目的位置,用户可以用下列指令定义移动方式:MoveJoint [Joint],MoveLin [Point],MoveCir [Point]和MoveComb。
5. End:当编程完成后,在程序的末尾应该编入End指令,一般结束一个程序的时候会回到原点,End指令有两个参数,第一个参数可以设置工具的坐标,设为“Work”;第二个参数可以设置用于到达home点的机械臂移动方式,设为“Joint”或“Lin”。
6. Speed:Speed指令可以用来控制机械臂运行的速度,在Speed指令中可以指定多个速度参数,例如,SpeedLin [velocity(m/s)], SpeedJoint [velocity(deg/s)]和SpeedTool [velocity (m/s)]。
7. Stop:当机械臂出现故障或在工作过程中又被迫暂停时,只要输入Stop指令就可以暂时停止机械臂的运行。
8. Wait:等待指令可以在机械臂完成某些指令之后,等待一定的时间后再继续执行下一个指令,单位是秒,例如,Wait 10 。
9. Comment: Comment指令用于在程序中添加任意的文本[1] 。
10. Manual: Manual指令用于退出自动模式,转入手动模式,在手动模式下,机械臂的运动受键盘,操作执行。
ABB机器人常用指令总结

ABB机器人常用指令总结
一、概述
ABB机器人的指令是基于操作系统的,也就是说,要掌握ABB机器人
的指令,就要先理解ABB机器人的操作系统。
ABB机器人的操作系统是一
个基于RobotWare的操作系统,用于控制ABB机器人的指令是基于RobotWare指令的。
ABB机器人的操作系统提供了许多指令可供用户操作,下面介绍ABB机器人常用的几个指令。
二、RobotWare指令
1、安全指令:RobotWare的安全指令包括“安全状态”和“安全设置”两大类。
其中,“安全状态”用于控制机器人的安全状态,如开启或
关闭机器人,检测机器人的状态等;“安全设置”用于设置机器人的安全
参数,如设置机器人的安全半径、设置机器人的碰撞告警阈值等。
2、机器人控制指令:RobotWare的机器人控制指令主要涉及机器人
的运动控制、机器人的位置控制、机器人的夹持控制等。
3、文件操作指令:RobotWare的文件操作指令包括文件打开、文件
查询和文件关闭等。
4、调试指令:RobotWare的调试指令主要涉及机器人调试、仿真调
试等。
三、常用指令
1、启动机器人:开启机器人的命令是“RobStart”,用于启动机器人。
2、停止机器人:停止机器人的命令是“RobStop”,用于停止机器人的运行。
3、控制机器人运动:机器人的运动控制指令有“RobMove”、“RobSpeed”等。
ABB机器人常用指令总结

备注
59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117
ABB机器人指令
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 名称 1.1.AccSet—降低加速度 1.2.ActUnit—激活一个机械单元 1.3.Add—增加一个数字数值 1.4.AliasIO—用别名定义I/O 1.5.“:=”—赋值 1.6.BitClear—在一个字节数据中清除一个特定位 1.7.BitSet—在字节数据中设定一个特定的位 1.8.BookErrNo—定制一个RAPID系统错误号码 1.9.Break—跳出程序执行 1.10.CallByVar—通过一个变量调用程序 1.11.CancelLoad—取消模块的加载 1.12.CirPathMode—在圆形路径过程中工具再定位 1.13.Clear—清除数值 1.14.ClearIOBuff—清除串行通道的输入缓冲器 1.15.ClearPath—清除当前路径 1.16.ClearRawBytes—清除原始字节数据的内容 1.17.ClkReset—复位一个用来计时的时钟 1.18.ClkStart—开始一个用来计时的时钟 1.19.ClkStop—停止一个用来计时的时钟 1.20.Close—关闭一个文件或者串行通道 1.21.CloseDir—关闭一个目录 1.22.comment—注释 1.23.Compact IF—如果满足一个条件,那么。。。(执行一个指令) 1.24.ConfJ—在关节运动过程中控制配置 1.25.ConfL—在线性运动过程中监视配置 1.26,CONNECT—把中断连接到陷阱程序 1.27.CopyFile—复制一个文件 1.28.CopyRawBytes—复制rawbytes数据的内容 1.29.CorrClear—删除所有修正发生器 1.30.CorrCon—连接到一个修正发生器 1.31.CorrDiscon-断开修正发生器 1.32.CorrWrite-向修正发生器写数据 1.33.DeactUnit-解除一个机械单元 1.34.Decr-(让变量或恒量的数值)减1 1.35.DitherAct-激活一个软件伺服的抖动 1.36.DitherDeact-解除一个软件伺服的抖动 1.37.DropSensor-丢弃传感器上的对象 1.38.DropWObject-丢弃conveyor上的工作对象 1.39.EoffsOff-解除一个外部轴的偏移 1.40.EoffsOn-激活一个外部轴的偏移 1.41.EoffsSet-用一个已知的数值激活一个外部轴的偏移 1.42.EraseModule-擦除一个程序模块 1.43.ErrLog-写一个错误信息 1.44.ErrRaise-写一个警告并且调用一个错误处理句柄 1.45.ErrWrite-写一个错误信息 1.46.EXIT-终止程序执行 1.47.ExitCycle-跳出当前循环并执行下一个指令 1.48.FOR-重复给定数量的次数 1.49.GetDataVal-获得数据对象的数值 1.50.GetSysData-获得系统数据 1.51.GetTrapData-获得当前TRAP的中断数据 1.52.GOTO-执行一个新指令 1.53.GripLoad-定义机器人的有效载荷 1.54.HollowWristReset-复位IRB5402和IRB5403的凹形腕部 1.55.Idelete-取消一个中断 1.56.Idisable-废除一个中断 1.57.Ienable-使能中断 1.58.Ierror-定制一个错误处理的中断
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB机器人程序指令汇总(1)控制指令:
MOVE:使机器人进行移动操作;
SETPOS:设置机器人的位置;
SETSPEED:设置机器人的移动速度;
STOP:停止机器人操作;
WAIT:让机器人等待指定时间;
RESET:重置机器人;
(2)比较指令:
EQ:比较两个数值是否相等;
GT:比较两个数值是否大于;
LT:比较两个数值是否小于;
GE:比较两个数值是否大于等于;
LE:比较两个数值是否小于等于;
(3)转换指令:
JMP:跳转指令;
CALL:调用其他程序指令;
RETURN:返回到调用程序的位置;
(4)数学指令:
ADD:加法;
SUB:减法;
MUL:乘法;
DIV:除法;
ABS:绝对值;
DFIX:四舍五入保留小数;
(5)条件指令:
IF:判断语句;
ELSE:条件不符合时执行的操作;
ENDIF:结束IF语句;
(6)循环指令:
WHILE:循环语句;
ENDWHILE:结束WHILE语句;
DO:DO循环语句;
ENDDO:结束DO循环语句;
(7)输入输出指令:
INPUT:输入信号;
OUTPUT:输出信号;
(8)其他指令:
JOG:机器人的连续运动;。