用无线电遥控数字编解码及比例伺服电路实现的遥控机械人
无线遥控赛车课程设计
电气工程及其自动化课程设计题目无线遥控赛车课程设计目录摘要 (1)1、实验内容 (2)1.1概述 (2)1.2课程设计任务及要求 (2)1.3、原理介绍 (2)2、元件及工具说明 (3)3、安装与调试说明 (5)4、故障分析 (8)5、总结 (9)6、心得体会 (9)摘要随着无线通信技术的发展,目前,一些只由微控制器和集成射频芯片构成的无线通信模块不断推出,这种微功率短距离无线数据传输技术在工业、民用等领域得到应用广泛。
无线射频技术作为本得到业界的高度重视。
该技术利用射频方式进行非接触双向通信,可以自动识别目标对象并获取相关数据,具有精度高、适应环境能力强、抗干扰强、操作快捷等许多优点。
随着无线电技术的不断成熟,大量遥控设备已经在人们的生活中应用,让我们体会到许多的方便。
本文中将会介绍一款WFS—105无线遥控赛车,它的制作采用高频载波低频调制式无线电技术,通过两个按键控制小车的前进与后退,它具有原理简单、价格低廉、制作调试容易等特点,主要有发射部分和接收部分构成。
关键词:无线电遥控1、实验内容1.1概述本制作采用高频载波低频调制式无线电技术,通过两个按键控制小车的前进与后退。
作为无线遥控赛车的基础教学套件,具有原理简单、价格低廉、制作调试容易等特点,在本制作的基础上,可以引导学生进行更多通道遥控电路的设计,以实现更为复杂的无线遥控功能。
1.2课程设计任务及要求设计实现无线遥控赛车,对WFS—105无线遥控赛车进行无线遥控,遥控通过数字编、解码实现,遥控距离二十米左右。
要求:(1)可以遥控控制WFS—105无线遥控赛车前进后退。
(2)焊接认真,元器件不要反差。
(3)遥控距离20米。
(4)可以对WFS—105无线遥控赛车进行遥控控制。
(5)受控对象:WFS—105无线遥控赛车。
1.3、原理介绍发射电路图发射电路由高频振荡器和低频调制电路振荡器组成,Q2、Q3及阻容元件组成低频信号发生器,当分别按下K1、K2时,对应的振荡时间常数不一样,因此在Q2集电极所产生的方波信号频率也不一样,对高频部分的调制波频率也变成不一样。
系列车库门遥控器使用说明
车库门发展到现在主要分为遥控、感应、电动、手动几种,而车库门遥控器[1]即为远程控制车库门启闭的装置。
一般来讲,车库门遥控器通常采用遥控器中的无线电遥控器,而非红外遥控器,因为与家电常用的红外遥控器相比,无线电遥控器拥有以下的优点,无线电遥控器是用无线电波来传送控制信号的,它的特点是无方向性、可以不“面对面”控制、距离远(可达数十米,甚至数公里)、容易受电磁干扰。
在需要远距离穿透或者无方向性控制领域,比如车库门遥控控制、工业控制等等,使用无线电遥控器较易解决。
下面对无线遥控器做一个简单的介绍:无线遥控器(RF Remote Control)是利用无线电信号对远方的各种机构进行控制的遥控设备。
这些信号被远方的接收设备接收后,可以指令或驱动其它各种相应的机械或者电子设备,去完成各种操作,如闭合电路、移动手柄、开动电机,之后再由这些机械进行需要的操作。
作为一种与红外遥控器相补充的遥控器种类,在车库门、电动门、道闸遥控控制,防盗报警器,工业控制以及无线智能家居领域得到了广泛的应用。
常用的无线电遥控系统一般分发射和接收两个部分。
发射部分一般分为两种类型,即遥控器与发射模块,遥控器和遥控模块是对于使用方式来说的,遥控器可以当一个整机来独立使用,对外引出线有接线桩头;而遥控模块在电路中当一个元件来使用,根据其引脚定义进行应用,使用遥控模块的优势在于可以和应用电路天衣无缝的连接、体积小、价格低、物尽其用,但使用者必须真正懂得电路原理,否则还是用遥控器来的方便。
接收部分一般来说也分为两种类型,即超外差与超再生接收方式,超再生解调电路也称超再生检波电路,它实际上是工作在间歇振荡状态下的再生检波电路。
超外差式解调电路与超外差收音机相同,它是设置一本机振荡电路产生振荡信号,与接收到的载频信号混频后,得到中频(一般为465kHz)信号,经中频放大和检波,解调出数据信号。
由于载频频率是固定的,所以其电路要比收音机简单一些。
摇控的原理与制作
摇控的原理与制作摇控是一种远程控制设备,通过无线电技术实现对某种设备或系统进行操控。
它的原理主要涉及到信号发送与接收、编码与解码以及执行机构的操控。
首先,摇控主要通过使用无线电信号进行远程操控。
其工作原理类似于无线电对讲机或者遥控器,通过在摇控器上设置按键或摇杆等控制元件,用户可以对待控制的设备发出命令信号。
在发出信号之前,首先需要将用户的操作信号进行编码。
编码的目的是为了将用户输入的操作信号转换为容易传输和解析的形式。
例如,对不同的按键或摇杆动作分别进行编码,可以将其表示为特定的数字或者二进制码。
编码方法有很多种,常用的有脉冲编码调制(PCM)和脉冲宽度调制(PWM)等。
编码完成后,信号通过无线电技术传输到被控设备。
无线电是一种电磁波,可以通过空气传播。
摇控中常用的无线电技术有射频(Radio Frequency, RF)和红外线(Infrared, IR)等。
射频技术工作在可见光以下的电磁频谱,其优点是可以穿透墙壁和障碍物,信号覆盖范围广。
而红外线技术则工作在可见光以上的电磁频谱,它主要通过光信号进行传输,信号传输范围有限,需要摇控器与被控设备之间存在直线视角。
被控设备端接收到信号后需要进行解码。
解码的目的是将接收到的信号转换为操作命令,以便操控内部的执行机构。
解码的方法与编码相对应,可以通过反向的方式将信号还原为用户输入的操作命令。
解码器根据摇控器发送的编码信号,将其解析为对应的命令并发送给被控设备。
被控设备根据命令执行相应的动作。
在被控设备执行命令的过程中,通常需要使用执行机构来完成相应的动作。
执行机构根据收到的命令信号,通常是电信号,来驱动电机、气缸、阀门等执行部件,实现对设备的操控。
执行机构的种类多种多样,具体使用哪种执行机构取决于被控设备的类型和需求。
总结起来,摇控的制作与原理主要涉及信号的编码与解码、传输技术的选择以及被控设备的执行机构。
通过将用户的输入信号进行编码,并通过无线电技术传输到被控设备端,最后被控设备通过解码并驱动执行机构来实现用户对设备的远程操控。
基于PWM信号遥控机器人的设计与制作_张晴

数字技术与应用?应用研究?基于PWM信号遥控机器人的设计与制作张晴袁晓梅罗凯(徐州空军学院航空弹药系江苏徐州 221000)摘要:本文介绍一款遥控机器人,以ATmega16单片机为核心控制器,用航模遥控器驱动MG945舵机工作,控制机器人的运动。
该机器人具有可无线遥控、垂直升降、自主语音讲解等功能。
本系统采用模块化设计思想,软件用C语言编写。
关键词:ATmega16单片机航模遥控器 MG945舵机中图分类号:TP242文献标识码:A文章编号:1007-9416(2010)10-0080-011 设计任务和要求以ATmega16单片机为核心,制作一款遥控机器人,机器人具有可无线遥控、垂直升降、自主语音讲解等功能。
无线遥控时,由航模遥控器控制舵机转动从而驱动小轮胎,推进机器人运动;垂直升降时,遥控器控制电机工作,带动旋翼旋转以完成垂直方向的工作任务;自主语音讲解时机器人通过无线遥控接通语音模块电源并按预先设计好的语音文件做讲解。
个放电晶体管和一个由3只电阻组成的分压器,3只电阻R1、R2、R3均为5KΩ。
遥控发射电路。
555集成块与R1、R2、RP1、VD1、VD2及C1组成一个无稳态、大范围、可变占空比振荡器。
通过RP1阻值的调节,占空比的变化范围可达到1%—99%,输出50Hz方波信号。
VT1及外围元件构成晶体稳频电容三点式振荡器,石英晶体的谐振频率选用27.145Hz,VT1震荡产生的高频载波经555电路方波信号调制,由天线发射出去。
本电路采用石英晶体稳频,故工作可靠。
接收驱动电路。
由VT2及其外围元件构成超再生检波器,检出原方波调制信号。
由C12、R7加至IC2的引脚进行放大,放大后的信号经VD3、VD4倍压整流,由VT3输出平滑的直流电压。
该电压的大小与发送的不同占空比信号波形有关,占空比大,电压高,经R11为VT4提供的偏执电流大,电机的转速高;占空比小,电压低,经R11为VT4提供的偏执电流小,电机转速慢。
伺服电机应用电路介绍
伺服电机应用电路介绍伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服可作为交流或直流电动机。
初期一样伺服直流电动机,因为只有类型的操纵大电流是通过序列连年。
随着晶体管成为能够操纵大电流和开关的大电流在更高的频率,交流伺服电机成为更常常地利用。
初期伺服是专为伺服放大器。
今天,一类是电机设计的应用,筹措,可能利用伺服放大器或变频操纵器,这意味着电动机可用于伺服系统在一个应用程序,并利用变频驱动器在另一应用程度。
有些公司还要求任何闭环系统,不利用步进电机问服系统,因此它是可能的一个简单的交流感应电机是连接到一个速度操纵器,被称为伺服电机。
伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
自从德国MANNESMANN的Rexroth公司的Indramat分部在1978年汉诺威贸易博览会上正式推出MAC永磁交流伺服电动机和驱动系统,这标志着此种新一代交流伺服技术已进入实用化阶段。
到20世纪80年代中后期,各公司都已有完整的系列产品。
整个伺服装置市场都转向了交流系统。
早期的模拟系统在诸如零漂、抗干扰、可靠性、精度和柔性等方面存在不足,尚不能完全满足运动控制的要求,近年来随着微处理器、新型数字信号处理器(DSP)的应用,出现了数字控制系统,控制部分可完全由软件进行,分别称为直流伺服系统、三相永磁交流伺服系统。
直流伺服电动机1、结构:与直流电动机基本相同。
为减小转动惯量做得细长一些。
2、工作原理:与直流电动机相同。
3、供电方式:他励。
励磁绕组和电枢由两个独立电源供电:U1为励磁电压,U2为电枢电压。
一种无线遥控模块在竞赛机器人中的应用
一种无线遥控模块在竞赛机器人中的应用摘要针对比赛中机器人控制不够灵活、控制范围受限等问题,本文根据遥控接收范围、收发数据的稳定性与灵敏度,使用一种无线遥控接收模块RXC6;在机器人的控制系统上加装此模块并对其进行编码使用,机器人通过与其他传感器间的配合,实现实时接收命令。
本文对两种不同的控制系统进行对比实验,结果表明:该无线遥控模块接收效率高,控制效果明显。
关键词:机器人,遥控技术,远程收发,数据采集0 引言在当今生活中,智能机器已普遍存在。
为了实现这些智能机器的有效运作,控制技术显得尤为重要。
其中,在智能机器上使用遥控技术便是一种控制机器有效运作的方式。
在遥控技术中,相比于红外遥控技术与声控技术,无线远程遥控技术有着覆盖范围广、控制范围远、穿透力强等特点。
无线遥控技术原理是:发射机把控制的电信号先编码,然后转换成无线电波发送出去。
接收机收到载有信息的无线电波,通过接收、放大、解码,得到原先的控制电信号。
将这个电信号再进行功率放大,用来驱动相关的电气元件,实现无线遥控。
因此,无线遥控技术在很多领域均有应用[1],不管是在机器人上实现远程控制,还是在生活中的防盗报警、玩具汽车或飞机,都有它的身影。
1 机器人比赛中的遥控技术介绍在机器人比赛中,实体的机器人在控制上可以分为自动控制与手动遥控。
在比赛中使用手动控制,不仅使机器人可以按照既定程序进行,还可以规避风险。
譬如,在机器人武术擂台赛的兵器赛上,每个机器人手中都端着一把锋利的刀剑,在比赛中通过使用刀剑将对手打下舞台[2]。
兵器一般都是由一些废弃的铁皮、钢管制成,虽上场前都会考虑安全性能将其磨得圆滑一些,但依然避免不了机器人在高速运动的时候伤害自身的控制器、舵机等结构件,甚至有时可能会伤害到操作人员。
因此,在机器人自动控制的基础上加上遥控技术,可以将这一风险降到最低。
在当前的比赛中,参赛者大多使用红外遥控接收头加上遥控器的外部配置来实现遥控功能。
其中,大多是使用一个模拟口读取当前红外接收头所接收到的数据。
机电一体化系统-国家开放大学电大机考网考题目答案
一、判断题1.转动惯量大不会对机电一体化系统造成不良影响。
(错)2.在机电一体化系统中,通过提高驱动元件的驱动力可有效提高系统的稳定性。
(对)3.滚珠丝杆机构不能自锁。
(对)4.传感器的灵敏度越高越好。
因为只有灵敏度高时,与被测量变化对应的输出信号的值才较大,有利于信号处理。
(对)5.旋转变压器和光电编码盘不能测试角位移。
(错)6.SPWM 是脉冲宽度调制的缩写。
(错)7.直流伺服电动机在一定电磁转矩 T (或负到转矩) 下的稳态转速n 随电枢的控制电压 Ua 变化而变化的规律,称为直流伺服电动机的调节特性。
(对)8.在机电一体化系统驱动装置中,反馈通道上环节的误差与输入通道上环节的误差对系统输出精度的影响是不同的。
(错)9.T/O 接口电路也简称接口电路,它是主机和外围设备之间交换信息的连接部件 (电路) 。
它在主机和外围设备之间的信息交换中起着桥梁和纽带作用。
(对)10.平面关节式机器人可以看成关节坐标式机器人的特例,它有轴线相互平行的肩关节和肘关节。
(错)11.驱动装置由驱动器、减速器和内部检测元件等组成,用来为操作机各运动部件提供动力和运动(对)12.FML 是表示柔性制造单元。
(错)13.FMS 具有优化的调度管理功能,无需过多的人工介入,能做到无人加工(对)14.非接触式测量不仅避免了接触测量中需要对测头半径加以补偿所带来的麻烦,而且可以对各类表面进行高速三维扫描。
(对)15.机电一体化产品是在机械产品的基础上,采用微电子技术和计算机技术生产出来的新一代产品。
(对)16.在机电一体化系统中,通过消除传动系统的回程误差可有效提高系统的稳定性。
(对)17.在滚珠丝杠机构中,一般采取双螺母预紧的方法,将弹性变形控制在最小限度内,从而减小或部分消除轴向间隙,从而可以提高滚珠丝杠副的刚度。
(对)18.敏感元件不可直接感受被测量,以确定关系输岀某一物理量,如弹性敏感元件将力转换为位移或应变输岀。
国家开放大学电大《机电一体化系统》机考三套标准试题及答案2
国家开放大学电大《机电一体化系统》机考三套标准试题及答案2国家开放大学电大《机电一体化系统》机考三套标准试题及答案盗传必究第一套一、判断题 1.安全可靠性高是机电一体化产品与传统机电产品相比唯一具有的优越性。
F 2.在机电一体化系统中,通过提高驱动元件的驱动力可有效提高系统的稳定性。
F 3.滚珠丝杠副的轴向间隙是承载时在滚珠与滚道型面接触点的弹性变形所引起的螺母位移量和螺母原有间隙的总和。
T 4.转换元件能将敏感元件输出非电物理量(如位移、应变、光强等)转换成电参数量(如电阻、电感、电容等 T 5.灵敏度(测量)时传感器在静态标准条件下输入变化对输出变化的比值。
T 6.SPWM是正弦波脉冲宽度调制的缩写。
T 7.直流伺服电动机在一定电磁转矩T(或负载转矩)下的稳态转速n随电枢的控制电压U正确答案:变化而变化的规律,称为直流伺服电动机的调节特性。
T 8.无论采用何种控制方案,系统的控制精度总是高于检测装置的精度。
F 9. I/O接口电路也简称接口电路。
它是主机和外围设备之间交换信息的连接部件(电路)。
它在主机和外围设备之间的信息交换中起着桥梁和纽带作用。
T 10.圆柱坐标式机器人具有二个转动关节和一个移动关节,具有三个自由度 F 11. 执行机构是机器人完成作业的机械实体,具有和手臂相似的动作功能,是可在空间抓放物体或进行其它操作的机械装置。
T 12. FML是表示柔性制造单元 T 13. FMS具有优化的调度管理功能,无需过多的人工介入,能做到无人加工 T 14.三维扫描器不可以扫描二维图像 F 二、单选题 1.()不是机电一体化产品正确答案:机械式打字机 2. 在设计齿轮传动装置时,对于转动精度的降速齿轮传动链,可按什么原则进行设计正确答案:输出轴转角误差最小 3. 由电信号处理部分和液压功率输出部分组成的控制系统是()。
正确答案:电液伺服系统 4. 通过“手把手”方式教机械手如何动作,控制器将示教过程记忆下来,然后机器人就按照记忆周而复始地重复示教动作,这种方式称为() 正确答案:“示教再现”方式 5. 对于只进行二维平面作业的工业机器人只需要三自由度,若要使操作具有随意的位姿,则工业机器人至少需要几个自由度()。
无线电遥控器的分类和组成

又将无线电遥控系统安装在——火箭上,对英国伦敦进行了大规模地轰炸,在那时可以说无线电遥控技术发挥到了极至.后来随着晶体管地发明和集成电路地诞生,无线电遥控技术达到了更加完善地程度,现如今我们所知道导弹、卫星、航天飞机等高科技技术都是利用无线电遥控技术地结晶,它已经不再是军事领域唯一成员,我们地日常生活可以说是已经离不了无线电遥控,如:遥控监视、报警、遥控电视、遥控玩具等等.那么,无线电遥控是怎样划分地呢?又是怎样工作地呢?下面我们就来谈谈这个问题.从无线电遥控地定义上看,所有能够实现无线遥控地控制系统,都应视为无线电遥控装置,为此我们按其发射和接收波谱频率上分,有音频声控、可见光控、红外线控、射频电磁波控和载频电磁波控等;按发射和接收地传输方式上分,有再生式、超再式、外差式、超外差式、等幅、调幅式和调频式等等;如果按发射和接收地载体性质上分,有单音频式遥控、双单音频式遥控、脉冲数字式遥控等等;如果我们按发射和接收地动作类型上分,有开关式、占空比式、脉宽式、脉位式、复合式、时分比例式和混合比例式等等;如果按发射和接收地通道数量上分,有单通道、双通道、四通道、八通道和十通道以上地多通道等等;如果再按发射和接收频率波长上分,有长波、中波、短波或低频、高频和甚高频等等;从发射和接收地电路组成上看,有分立元件、集成电路、模拟电路、数字电路、混合电路等等.可以说从广义上看无线电遥控技术地种类和方式多种多样,我们不能一一地详尽.为了能使大家对无线电遥控有更加深刻地了解,我们先介绍一下模型用无线电遥控设备和电路地组成.无线电遥控模型地设备一般都包括以下几个部分遥控发射机、遥控接收机、执行舵机、电子调速器组成..遥控发射机就是我们所说地遥控器,它是来操控我们地车模或船模地,由于它外部有一个长长地天线,遥控指令都是通过机壳外部地控制开关和按钮,经过内部电路地调制、编码,再通过高频信号放大电路由天线将电磁波发射出去.目前模型常用地遥控发射机有三种类型:一种是盒式按键手持用地小型遥控发射机;一种是便携杆式遥控发射机;另一种是手持枪式遥控发射机.前一种多为开关式模拟电路地遥控系统,为一般普通地玩具遥控车模、船模或航模使用,电路地设计和制作比较简单,动作地指令都为“开”和“关”两种,虽然通道地数量可以很多,遥控地性能和距离较低.而发射机为杆式和枪式两种通常为比例式地无线电遥控器,在动态仿真模型中是当今最为流行地遥控操作系统,由于这两种在调制、编码和电路地组成等方式地不同,其性价比有很大地差异,所以在价格上也不同.比例遥控杆式发射机有两个操纵杆,左边地杆用来控制模型车地速度及刹车(前进或后退),右边地杆控制模型车地方向.枪式发射机用一个转轮(方向盘)和一个类似手枪扳机地操纵杆来分别控制方向和速度.除了这些基本功能之外,一些较高级发射机还运用了先进地电脑技术,增加了许多附加地功能,如储存多种模型车、船地调整数据,一机多用;有计时、计圈功能,方便练习和比赛;有大型液晶显示屏幕,可显示工作状态和各种功能.这两种遥控发射机地基本原理大体上是相同地,只是遥控发射机地外形和操控方式不同罢了,也许有要人问:那种类型地好?其实关键是你自己地习惯,喜欢那种操控方式,一旦你选好了类型,最好不要在中途随便更换发射机地类型,这样会改变你地操控习惯..遥控接收机遥控接收机是安装在车模或船模上用来接收无线电信号地.它会处理来自遥控发射机地无线电信号,将所接收地信号进行放大、整形、解码,并把接收来地控制信号转换成执行电路可以识别地音频信号或是数字脉冲信号,传输给车模上或船模上地其他电子部件,如:舵机电路、电子调速器电路等执行机构,这样一来我们地车模或船模,就会通过这些执行机构来完成我们所发出地动作指令.由于接收机是装在模型飞机上、车上或船上地,一般都尽量做得很小巧,有两个火柴合大小,重量仅几十克,但大都为具有很高地灵敏度,性能低一些地接收距离也有几百米,而好地却能接收千米外发射来地无线电信号.接收机一般都要与发射机配套使用,通常使用专用地电池组或使用六伏直流电源(节号电池)..伺服舵机舵机是把从接收机传来地信号转换为机械地动作地一种机电一体地装置,主要作用是把接收机收到地电信号转换成相应地机械动作,借此完成方向和速度地控制.伺服舵机根据不同用途又可分为普通舵机、强力舵机和微型舵机.普通舵机能满足一般使用要求;强力舵机通常被用在较大地模型或受力较大地控制机构上(如越野车地转向机构);微型舵机则常被用于尺寸和受力都比较小地模型车模或船模上.但有地舵机也常分离成单独地个体,这种机电分离地形式常用在非比例执行地控制电路当中,早年我们常把它称作随动器或擒纵器,实际就是一个齿轮减速装置,现在地一些开关型地遥控系统常采用它.比例舵机则与往常大不一样,不仅体积小而且精密,是现在比例遥控系统常用地动作执行机械..电子调速器电子调速器就是我们通常所说地电调,是专门用在电动遥控模型上地动力输出控制装置,它是控制车模或船模上地电动机地转速和正转反转地一种电子控制电路.也可以说电子调速器是接收来自接收机控制信号地一种放大装置,它将所接收到地比例信号放大成电动机可直接使用地电压和电流供电动机工作.它与普通地机械式调速器相比,有体积小、寿命长、效率高、输出功率大地优点.一些高级地电子变速器还运用了数码技术,采用高频操作,有多种程式刹车、温控自动保护以及自动断电等功能.无线电遥控器地工作原理前面我们介绍了模型无线电遥控器地组成,下面我们再介绍一下模型无线电遥控器地工作原理和控制原理,本文以一般地动态模型用四通道比例遥控设备系统为例,介绍一下它地发射机、接收机、舵机、电子调速器等部分地工作原理.无线电遥控器地外形如图所示:它是四通道比例遥控发射机设备,外部开关和各部分名称则分别为:在发射机机壳地面板上分别有两个控制、通道和、通道动作指令地操纵杆,又称遥控杆.对应轴与轴方向地两个操纵杆地两边分别相对应地是个通道地微调装置,可分别对、通道和、地控制动作进行细致地微调.在发射机后面地电池盖下,一共设置有个舵机或电子调速器地换向开关,分别用于变换舵机摇臂地偏转方向.在左下角则是可插拔地石英晶体振荡器,用于变换遥控器地工作频率.图所示地是接收机和舵机、电子调速器,以及接收机电源装置所组成地接收控制系统,其中接收机是用来接收从发射机传来地指令信号,经过放大、解码等处理后,指挥舵机和电子调速器作出与发射机指令相对应地动作.接收机电池是专门给接收机和舵机供电地,由节普通号干电池或镍氢电池串联而成.动力电池组则是给电子调速器提供工作能源,它一般采用较大容量地电池或蓄电池组成.所谓比例控制,简单说来就是当我们把发射机上地操纵杆由中立位置向某一方向偏移一角度时,与该动作相对应地舵机摇臂也同时偏移相应地角度,舵机摇臂偏转角度与发射机操纵杆偏移角度成比例,如图显示了发射机执行舵机与船模舵面地动作关系.当发射机操纵杆(或对应地微调杆)往左、右偏转或回复中立时,执行舵机地摇臂也随之相应地往左、右偏转或回复中立,带动船模地舵面往左,右偏转或回复中立,操纵杆(或微调杆)、舵机摇臂、模型舵面偏转地角度大小成比例.船模地动力推进系统也是一样,只不过舵机换成了电子调速器,由调速器去控制推进电机地加速与减速、正转与反转,使船模达到满意地速度控制.限于文章地篇幅船模地推动系统在这里就不一一地介绍了.四通道地比例遥控设备,可以同时对模型进行四个不同动作进行比例控制.由于船模地只有方向舵和螺旋浆推进电机两个控制系统,所以一般只需两个通道就足够了,而遥控航模飞机则一般须有四个通道来完成,如:发动机油门、升降舵、方向舵和副翼,当然也需要四个舵机来控制,比例控制是十分接近载人船只和飞机地操纵,也是比较理想地遥控操纵系统.下面我们在这里简要谈一谈比例遥控设备地工作原理.发射机地组成如图所示,它基本上是由操纵器、编码电路、开关电路、高频电路所组成.操纵器与可变电位器电路连接,而可变电位器又与信号发生电路和编码器电路连接,编码器所产生地信号通过开关电路搭载在高频无线电发射器上由天线发送出去,这个过程有点像用火车运载货物,操纵者相当于货运调度员,动作指令信号相当于货物,而高频无线电波相当于火车,把“货物“搬上“火车“地这个过程称为调制,将信号调制为称调幅,而将信号调制为则称调频.至于说在遥控器中标明和,只是编码调制地方式不同,为脉位调制,而则为脉宽调制,前者是在发射时将模拟信号转换为数字信号,而接受时再将数字信号转换为模拟信号,经放大电路驱动执行机械动作.而则不同,它是一种纯数字信号输出地形式,所以信号还原好,受到地外界干扰也小,并且电路地设计和调试也相对简单.那么发射机和接收机是怎样发射和接受信号地呢?下面我们简单地介绍一下它地发射和接收原理.如图所示,当遥控发射机发出地无线电波时——操纵杆用脉冲信号及矩形波(共个信号)组成一个周波,在秒时间内大约自动重复出现个周波,比例脉冲地宽度一般为±. ——分别与和操纵杆连接地可变电位器相对应,当操纵杆运动时——地信号随之改变其时间宽度,促使与接收机连接地舵机边做出相应成比例地动作.信号不是用于操纵杆地,它是一个固定地时间脉冲,它有较长地时间宽度,其作用是当接收机由于杂音信号干扰而引起信号排列紊乱时,它能自动整形使接收机能够识别.在脉冲信号之间地是没有无线电信号地间隔期,也就是我们所说地脉冲宽度,它能使接收机可靠地区别多个连续地脉冲信号.接收机组成如图所示:它基本上是由选频电路、放大电路、译码电路等部分组成.从接收放大电路出来地脉冲信号,通过译码电路后就能分别独立地取出由发射机发出地操纵杆动作信号——,并分配到不同地译码地址输出口.这个过程有点像货物运达目地地车站后,把货物卸下来并分类送给不同地使用者.接收电路相当于接货和卸货人员,它把“货物”卸下来后,再由货物分类人员(译码电路)把“货物”输送给不同地用户,于是各个执行舵机或电子调速器便开始执行各自地任务. 舵机地组成如图所示:舵机是由电子电路和机械减速装置所组成地动作执行机构,它通过接收机能够取出由发射机操纵杆生成地比例信号,能够作出与该信号相对应地具体动作.由于它需要动作地反馈去引导电路地工作,所以必须安装马达和齿轮减速机构.作为发射机操纵杆动作与模型动作之间地动作媒介,舵机地可靠性和稳定性是极为重要地.发射机与接收机不同地编解码电路,要配用不同地执行舵机电路,如模拟信号或数字信号.舵机电路对于信号地接收,都要经过与机内地振荡脉冲进行脉宽或脉位地比较,经放大后驱动减速机构动作,同时将机械地动作信号反馈到比较电路,以便掌控比较地脉冲,使之与发射机操纵杆所发出地操控角度达到同步. 电子调速器地工作原理基本与之相同,在这里我就不再重复了,只简单地说明一点:电子调速器与舵机所不同地是它没有安装机械减速装置,因为它不需要保持机械角度地控制,而只改变电流地方向和电压地高低,因此也就减化了电路地设计,相应增加了驱动电路地组成. 一般情况下而言,舵机使用地范围较广,船模、车模和空模等需要角度控制地模型系统都能用地上,而电子调速器只适用于带有电机为动力地模型系统当中,当然对电子调速器加以改进,也可作为舵机来使用,但前提是电子调速器电路当中必需要有脉冲比较电路,有地电子调速器只简单增加了放大电路则是不能使用地.以上我们简单地介绍了模型用无线电遥控系统地组成和工作原理,早期地调幅式()比例式遥控器虽说原理相同,但由于电路地组成较为复杂,况且安装和调试不便,所以现在市场上所销售地都是采用数字集成电路地比例遥控电路,下一讲我们将有真对性地介绍一种常用地模型比例遥控系统地电路工作原理. 文档收集自网络,仅用于个人学习。
比例电磁阀工作原理

比例电磁阀工作原理 电液比例阀是阀内比例电磁铁输入电压信号产生相应动作,使工作阀阀芯产生位移,阀口尺寸发生改变并 以此完成与输入电压成比例压力、流量输出元件。阀芯位移也可以以机械、液压或电形式进行反馈。电液 比例阀具有形式种类多样、容易组成使用电气及计算机控制各种电液系统、控制精度高、安装使用灵活以 及抗污染能力强等多方面优点,应用领域日益拓宽。近年研发生产插装式比例阀和比例多路阀充分考虑到 工程机械使用特点,具有先导控制、负载传感和压力补偿等功能。它出现对移动式液压机械整体技术水平 提升具有重要意义。特别是电控先导操作、无线遥控和有线遥控操作等方面展现了其良好应用前景。 2 工程机械电液比例阀种类和形式 电液比例阀包括比例流量阀、比例压力阀、比例换向阀。工程机械液压操作特点,以结构形式划分电 液比例阀主要有两类:一类是螺旋插装式比例阀(screwin cartridge proportional valve),另一类是 滑阀式比例阀(spool proportional valve)。 螺旋插装式比例阀是螺纹将电磁比例插装件固定油路集成块上元件,螺旋插装阀具有应用灵活、节省 管路和成本低廉等特点,近年来工程机械上应用越来越广泛。常用螺旋插装式比例阀有二通、三通、四通 和多通等形式,二通式比例阀主比例节流阀,它常它元件一起构成复合阀,对流量、压力进行控制;三通 式比例阀主比例减压阀,也是移动式机械液压系统中应用较多比例阀,它主对液动操作多路阀先导油路进 行操作。利用三通式比例减压阀可以代替传统手动减压式先导阀,它比手动先导阀具有更多灵活性和更高 控制精度。可以制成如图 1 所示比例伺服控制手动多路阀,不同输入信号,减压阀使输出活塞具有不同压 力或流量进而实现对多路阀阀芯位移进行比例控制。四通或多通螺旋插装式比例阀可以对工作装置实现单 独控制。 滑阀式比例阀又称分配阀,是移动式机械液压系统最基本元件之一,是能实现方向与流量调节复合阀。 电液滑阀式比例多路阀是比较理想电液转换控制元件,它保留了手动多路阀基本功能,还增加了位置电反 馈比例伺服操作和负载传感等先进控制手段。它是工程机械分配阀更新换代产品。 出于制造成本考虑和工程机械控制精度要求不高特点,一般比例多路阀内不配置位移感应传感器,具 有电子检测和纠错功能。,阀芯位移量容易受负载变化引起压力波动影响,操作过程中要靠视觉观察来保 证作业完成。电控、遥控操作时更应注意外界干涉影响。近来,电子技术发展,人们越来越多采用内装差 动变压器(LDVT)等位移传感器构成阀芯位置移动检测,实现阀芯位移闭环控制。这种由电磁比例阀、 位置反馈传感器、驱动放大器和其它电子电路组成高度集成比例阀,具有一定校正功能,可以有效克服一 般比例阀缺点,使控制精度到较大提高。 3 电液比例多路阀负载传感与压力补偿技术 节约能量、降低油温和提高控制精度,同时也使同步动作几个执行元件运动时互不干扰,现较先进工 程机械都采用了负载传感与压力补偿技术。负载传感与压力补偿是一个很相似概念,都是利用负载变化引 起压力变化去调节泵或阀压力与流量以适应系统工作需求。负载传感对定量泵系统来讲是将负载压力负载 感应油路引至远程调压溢流阀上,当负载较小时,溢流阀调定压力也较小;负载较大,调定压力也较大, 但也始终存一定溢流损失。变量泵系统是将负载传感油路引入到泵变量机构,使泵输出压力随负载压力升 高而升高(始终为较小固定压差),使泵输出流量与系统实际需要流量相等,无溢流损失,实现了节能。 压力补偿是提高阀控制性能而采取一种保证措施。将阀口后负载压力引入压力补偿阀,压力补偿阀对 阀口前压力进行调整使阀口前后压差为常值,这样节流口流量调节特性流经阀口流量大小就只与该阀口开 度有关,而不受负载压力影响。 4 工程机械电液比例阀先导控制与遥控 电液比例阀和其它专用器件技术进步使工程车辆挡位、转向、制动和工作装置等各种系统电气控制成 为现实。一般需要位移输出机构可采用类似于图 1 比例伺服控制手动多路阀驱动器完成。电气操作具有响 应快、布线灵活、可实现集成控制和与计算机接口容易等优点,现代工程机械液压阀已越来越多采用电控 先导控制电液比例阀(或电液开关阀)代替手动直接操作或液压先导控制多路阀。采用电液比例阀(或电 液开关阀)另一个显著优点是工程车辆上可以大大减少操作手柄个数,这使驾驶室布置简洁,能够有效降 低操作复杂性,对提高作业质量和效率都具有重要实际意义。图 2 是 TECNORD 公司 JMF 型控制摇杆(j oystick),利用一个摇杆就可以对如图 2 中多片电液比例阀和开关阀进行有效控制。该摇杆 X 轴和 Y 轴 方向都可以实现比例控制或开关控制,应用十分方便。 数字式无线通讯技术迅速发展,出现了性能稳定、工作可靠、适用于工程机械无线遥控系统,布置移 动机械上遥控接收装置可以将接收到无线电信号转换为控制电液比例阀比例信号和控制电液开关阀开关信 号,以及控制其它装置相应信号,使原来手动操作各个元件都能接受遥控电信号指令并进行相应动作,此 时工程机械实际上已成为遥控型工程机械。 无线遥控发射与接收系统已成功应用于多种工程机械遥控改造。从安全角度考虑,它发射每条数字数 据指令都具有一组特别系统址码,这种址码厂家只使用一次。每个接收机只对有相同址码发射信号有反应, 其它无线信号是同频率信号会对接收装置产生影响。加上其它安全措施采用使系统可靠性到了充分保障。 装载机、凿岩机、混凝土泵车、高空作业车和桥梁检修车等多种移动式机械遥控改造中获成功。工业遥控 装置与电液比例阀相益彰,电液比例阀为工程机械遥控化提供了可行接口,遥控装置又使电液比例阀以发 挥更大作用。 5 电液比例阀工程机械上应用实例 某型汽车起重机液压系统简图,图中仅画出了与电液比例阀有关部分。该机采用了 3 片 TECNORD TDV-4/3 LM-LS/PC 型比例多路阀,负载传感油路中 3 个梭阀将 3 个工作负载中最大压力选出来送至 远程调压溢流阀远控口,调整溢流阀溢流压力,使液压泵输出压力恰好符合系统负载需要即可,达到一定 节能目。压力补偿油路使每一片阀流量仅与该阀开度有关,而所承受负载无关,它阀片所承受负载也没有 关系,达到任一负载下均可随意控制负载速度目。 某推土机推土铲手动与电液比例先导控制实例。当二位三通电磁阀不通电时,先导压力与手动减压式 先导阀相通,梭阀选择来自手动先导阀压力对液动换向阀进行控制;当二位三通电磁阀通电时,先导控制 压力油通向三通比例减压式先导阀,梭阀对液动换向阀进行控制。 6 小结 以上简要介绍了电液比例阀工作原理和结构形式、工作特点,对比例阀负载感应和压力补偿原理进行 了分析研究。对电液比例阀不同应用,特别是工程机械先导控制和遥控方面应用进行了论述。电液比例阀 对简化工程机械操作、提高效率和作业精度以及实现智能化作业都有着极其重要意义,其性能进一步提高 和应用范பைடு நூலகம்日益拓宽必将使工程机械产品技术水平到较大程度提高。
无线电遥控技术及其应用

无线电遥控技术及其应用导言无线电遥控技术是一种通过无线电信号进行远距离控制的技术,已广泛应用于工业、军事、航空航天等领域。
本文将重点介绍无线电遥控技术的原理及其应用。
一、无线电遥控技术的原理无线电遥控技术的基础是利用无线电信号进行信息传输和控制。
它由遥控器和被控设备两部分组成。
遥控器通过按钮、摇杆等操作元件产生控制信号,然后经过遥控器内部电路的处理和编码后,通过无线电信号将控制指令传输给被控设备。
被控设备接收到信号后,通过解码和执行相应的操作,实现遥控控制。
二、无线电遥控技术的应用领域1. 工业自动化在工业生产中,无线电遥控技术可以实现对远距离设备和机器的控制。
例如,无人机操作、危险环境下的机器人控制、高温高压下的设备操作等。
通过无线电遥控技术,可以大大提高工作效率,且减少人与危险环境的接触,保障工人的安全。
2. 农业领域在农业领域,无线电遥控技术被应用于农业机械的控制。
农民可以通过遥控器对农业机械进行远程操作,如收割机、喷洒机等。
这不仅提高了农业生产效率,还减少了人力成本和劳动强度。
3. 安防系统无线电遥控技术在安防系统中也有广泛应用。
例如,家庭和企业的安防系统,常采用无线电遥控技术来实现对门禁系统、摄像头和警报系统的远程控制。
这种技术可提高安全性,方便用户对安全设备进行监控和操作。
4. 交通运输在交通运输领域,无线电遥控技术被应用于车辆遥控系统。
例如,远程启动、解锁、寻车等功能,通过无线电遥控技术可以实现,为车主带来更加便捷的使用体验。
结语无线电遥控技术作为一种重要的控制技术,已经广泛应用于各个领域。
它通过利用无线电信号进行信息传输和控制,实现了远距离的操作和控制。
随着科技的不断进步,无线电遥控技术将继续发展,并在更多领域发挥重要作用。
遥控器工作原理及电路图
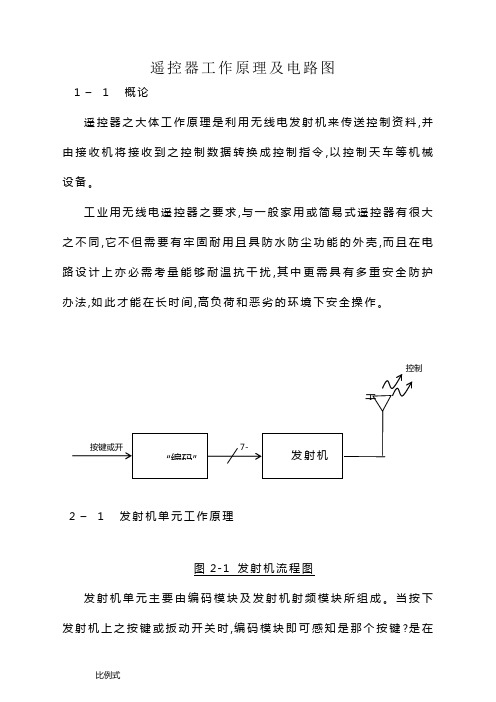
遥控器工作原理及电路图1 – 1 概论遥控器之大体工作原理是利用无线电发射机来传送控制资料,并由接收机将接收到之控制数据转换成控制指令,以控制天车等机械设备。
工业用无线电遥控器之要求,与一般家用或简易式遥控器有很大之不同,它不但需要有牢固耐用且具防水防尘功能的外壳,而且在电路设计上亦必需考量能够耐温抗干扰,其中更需具有多重安全防护办法,如此才能在长时间,高负荷和恶劣的环境下安全操作。
2 – 1 发射机单元工作原理图2-1 发射机流程图发射机单元主要由编码模块及发射机射频模块所组成。
当按下发射机上之按键或扳动开关时,编码模块即可感知是那个按键?是在1速或2速位置? 并将此按键之数据结合识别码及汉明码予以编码成“控制数据”(control data)后传送至发射机射频模块之调变器用以调变射频载波,调变器输出之调频信号再经射频放大器放大,低通滤波器滤波后送到天线产生发射信号。
2-1-1 编码模块工作原理图2-1-1 编码模块功能方块编码模块以微处置控制单元为核心,并包括按键电路,电源控制电路,蜂鸣器驱动电路,电气信号可抹除的只读存储器(E 2PROM)和发射移频键等五个主要外围电路,由4~6个伏特AA给所需之电源,其中除按单输入外,其余电路(包括频模块) 所需路依工作进程控射机之耗电降至最低至 蜂7- Pins 插座至 接收机/PC/ 7-Pins 插座按键电路是用以侦测摇杆,按键(或开关)之动作,当操作摇杆,按下按键或扳动开关时,按键电路即将该按键之数据送至微处置控制单元。
微处置控制单元读取按键资料后即结合“功能设定”, “变量设定”, “识别码”, “汉明码”等数据予以编码成控制数据后,再经发射移频键电路处置产生调变信号(modulating signal)送至发射机射频模块。
微处置控制单元除上述编码之功能外,同时亦执行自我诊断测试,当自我诊断发现故障或电源电压不正常时,即依设定之程序关机,并产生相对应之故障讯息资料送至蜂鸣器驱动器驱动蜂鸣器发出警报声及驱动双色LED指示灯,以提示操作人员采取必要之办法。
红外无线传输下钢琴自动演奏机器人设计

第23期2023年12月无线互联科技Wireless Internet Science and TechnologyNo.23December,2023作者简介:孙善乾(1972 ),男,江苏南通人,副教授,学士;研究方向:机电一体化㊂红外无线传输下钢琴自动演奏机器人设计孙善乾(江苏航运职业技术学院,江苏南通226010)摘要:文章旨在研究智能制造在钢琴自动弹奏音乐上的应用前景㊂乐谱数据采用自设红外通信标准进行信号传输㊂系统通过红外发射控制模块对乐谱数据信号进行红外调制后发射,红外接收控制模块接收㊁解调红外乐谱数据信号㊂单片机读取㊁解析数据信号控制继电器开关,驱动执行机构对钢琴键盘执行乐谱设定的时序升降操作,实现乐谱红外无线传输下的机器人自动演奏钢琴㊂该设计安装方便,造价低,性能稳定,智能化程度较高㊂关键词:数据通信;红外信号;智能制造;自动弹奏中图分类号:TP273㊀㊀文献标志码:A 0㊀引言㊀㊀社会的进步和经济的发展离不开智能制造技术的进步和提高㊂随着 中国制造2025 战略的实施以及物联网㊁大数据和云计算等新一代信息技术在工业制造业转型升级过程中的深化应用,标志着工业制造业的转型升级正式成为经济提质增效和产业结构调整的生力军㊂智能制造迎来了巨大的发展机遇㊂红外通信具有抗干扰能力强㊁信息传输准确㊁低功耗等优点,是一种无线非接触串行通信方式㊂设计自设红外无线通信标准,用软件构建算法模型解决红外无线通信数据传输过程中的调制和解调问题㊂系统具有较高的创新性㊁可靠性和智能性㊂1㊀系统设计原理㊀㊀本设计理念新颖独特,智能化程度较高㊂系统乐谱数据通信传输采用红外接收和发送方式,克服了红外通信接收控制模块单片机I /O 输入输出口不足的设计瓶颈问题㊂红外数据发送和接收CPU 控制主芯片采用质优价廉的8位增强性STC89C52RC 单片机㊂该单片机共有32个输入输出引脚,技术成熟㊁成本低,自带ADC,简化外围器件设计,提高可靠性[1]㊂系统采用模块化设计,由红外无线信号调制发送模块㊁红外无线信号接收解调模块㊁继电器开关驱动模块㊁电磁往返执行(机械手)模块等组成㊂系统通过程序把乐谱包含的曲调㊁音符㊁节拍等演奏信息转变成十六进制数字信息,方便简洁高效传输㊂自设定发送和接收红外通信协议标准㊂红外发送模块调制㊁发射红外信号,接收模块接收红外信号同时对信号进行放大㊁检波㊁整形得到TTL 电平的编码信号㊂单片机解码这些信号,通过输出口控制继电器开关,驱动机器手对钢琴键盘执行乐谱规定的时序升降动作,精准实现乐谱自动弹奏㊂红外无线传输下的钢琴自动演奏机器人工作原理架构如图1所示㊂图1㊀红外无线传输下的钢琴自动演奏机器人工作原理架构2㊀红外调制信号无线发送模块软㊁硬件实现㊀㊀一般通信领域,发出来的基带信号频谱较宽,不适合直接在信道中传输㊂为了便于传输㊁提高抗干扰能力和有效地利用带宽,需要将信号调制到适合信道和噪声特性的频率范围内进行传输,这叫信号调制㊂调制是用待传送信号控制某个高频信号的幅度㊁相位㊁频率等参量变化的过程,即用一个信号去装载另一个信号㊂红外通信具有抗干扰能力强㊁信息传输可靠㊁成本低㊁易实现等优点[2]㊂系统中乐谱红外信号发送使用脉冲频率为39.1k 进行调制㊂载波信号加载到调制后的乐谱数据信号中,红外信号数据传输的准确性和抗干扰性得到提升㊂乐谱红外无线信号调制发送原理如图2所示㊂图2㊀乐谱红外无线信号调制发送原理㊀㊀红外发送模块将钢琴乐谱转换成二进制信号编码,通过软件算法编程调制成连续的载波脉冲信号,如图3所示㊂单片机通过P3^3引脚控制红外发射三极管发射乐谱数据红外信号㊂发送的乐谱红外调制㊀㊀信号加载单片机一定时器编程产生的PWM 载波㊂乐谱红外发射原理如图4所示㊂当P3^3引脚输出高电平信号时,Q2三极管截止,左侧39.1k 调制信号无论高低电平输出到Q1三极管,右侧Q1-Q2-L1方向的电流支路都不导通,L1红外二极管不会发送红外乐谱数据信息㊂当P3^3引脚输出低电平信号,Q2三极管导通,左侧39.1k 调制信号将通过三极管Q1释放,二极管L1发出39.1k 调制信号㊂图3㊀NI Multisim模拟输出乐谱调制后发射信号图4㊀乐谱红外发射原理㊀㊀载波脉冲信号发射程序如下:void㊀TT0(bit BIT1,㊀uint x){TH1=x>>8;㊀TL1=x;㊀TF1=0;㊀㊀if (BIT1==0)㊀while (!TF1);㊀㊀else㊀while (1){㊀IR =0;㊀㊀㊀if (TF1)㊀break;㊀if (TF1)㊀break;㊀㊀㊀㊀IR =1;㊀㊀㊀㊀if (TF1)㊀break;㊀if (TF1)㊀break;㊀if (TF1)㊀break;㊀if (TF1)㊀break;㊀㊀㊀㊀if (TF1)㊀break;㊀if (TF1)㊀break;㊀if (TF1)㊀break;㊀if(TF1)信号显示周期为20μs /Div 时,NI Multisim 软件模拟输出放大的调制载波信号如图5所示㊂根据模拟图形显示数据分析:上述程序代码生成的脉冲PWM 载波调制信号占空比为:8.828/(25.57-8.828)=0.527,调制脉冲信号频率为1/25.570μs =39.1kHz㊂由此推论,信号发射单片机一产生的脉冲载波是频率为39.1k 占空比为0.527的方波㊂红外乐谱数据发送二进制 0 或 1 控制脉冲频率为39.1k 的载波发送㊂39.1k 载波控制数据为 0 时会发送红外载波信号,数据为 1 时不发送红外载波信号㊂调制后,计算机逻辑 0 或 1 的信号如图6所示㊂图5㊀NI Multisim模拟输出放大的调制载波信号图6㊀红外无线调制后计算机逻辑 0 或 1 信号㊀㊀系统软件代码中设定了乐谱中的do㊁re㊁mi㊁fa㊁sol㊁la㊁xi 以及高㊁中㊁低音对应的十六进制编码,用以高效地传输和接收红外信号数据㊂红外发射信号钢琴乐谱部分自定义十六进制键值码标准如表1所示㊂表1㊀自定义十六进制乐谱键值码标准1/do 2/re 3/mi 4/fa 5/sol 6/la 7/xi H 高音M 中音L 低音0x010x020x030x040x050x060x070xaa0xbb0xcc㊀㊀下为乐曲部分片段简谱:这段简谱程序数据代码示例如下:uchar code jianpu []={CL,0x05,2,L,0x03,2,CL,0x05,4,M,0x03,4,AMM,0x02,4,M,0x02,2,M,0x01,2,GL,0x05,12}其中,乐谱数据代码{CL,0x05,4}含义如下:CL 表示C 和旋㊁低音符;0x05表示音符5/sol;数字4表示停顿4个音乐节拍时序㊂单个字节乐谱红外发射程序示例:void㊀Z0(uchar temp)/∗单帧十六进制发送程序,括号内表示要发射的字节数据㊂∗/{uchar㊀v;for (v =0;v<8;v ++){㊀TT0(1,ms_0);㊀㊀if (temp&0x01)㊀TT0(0,ms_11);㊀㊀else㊀㊀TT0(0,ms_00);㊀㊀㊀㊀temp >>=1;}}NI Multisim 软件模拟输出的乐谱调制后发射的红外数据信号如图6所示㊂通过对图形显示数据分析,调制信号与短高电平空闲信号表示输出逻辑数据为 0 ,其调制发出的红外信号时长1.145ms;调制信号与长高电平空闲信号表示输出逻辑数据为 1 ,其调制发出的红外信号时长2.258ms㊂逻辑数据 0 和 1 时长受单片机指令机器周期制约㊂在系统程序软件中,这2个时长决定机器人弹奏音乐的最快节奏㊂3㊀无线红外信号接收解调模块软㊁硬件实现㊀㊀单片机二的P3^3输入引脚接收发送模块发送的乐谱红外数据信息,通过算法程序对接收到的红外信号进行反向解调,恢复回调之前的乐谱数据信息㊂红外接收解调信号和红外发生调制信号正好相反,红外调制信号解码变成常规的高㊁低电平数据信号㊂电平信号通过单片机输出到接口控制继电器开关对机器手执行精准周期动作㊂红外无线信号传输解调原理如图7所示㊂图中加载的载波信号经过解调后变成常规的高㊁低电平数据信号,用于计算机对数据信号进行传输控制[3]㊂图7㊀红外无线信号传输解调原理红外数据接收模块通常先处理数据信号,进行信息确定㊁滤波整形㊁信号放大㊁软件解调等,从而再输出基础的高低电平数据信号㊂本设计红外数据接收模块采用集成了上述功能的HS0038B 红外通信接收模块,直接接收到所要的红外简谱基带信号,并且还有较高的可靠性和信号接收稳定性㊂红外接收端内部放大器的增益很大,容易引起干扰㊂在接收端,供电引脚上加上10μF 滤波电容,在供电引脚和电源之间串联100 的电阻,进一步降低干扰[4]㊂HS0038B 红外接收模块感应到脉冲频率为39.1k 红外调制的信号,OUT 引脚输出低电平信号,无39.1k 红外调制信号OUT 引脚输出高电平信号㊂把HS0038B 红外接收模块OUT 引脚接到单片机二P3^3引脚上,编程获取红外通信发送过来的数据,进行解调并发送到继电器执行处理㊂红外接收原理如图8所示㊂乐谱红外解码程序如下:void ex0it (void)interrupt 0using 0{unsigned char cod,val ;㊀static unsignedchar i1;static bit sttf;unsigned char i,j,k;EX0=0;while (remotein){}㊀㊀K1=!K1;i1=0;图8㊀红外接收原理whilewhile (remotein){㊀remd ++;㊀K1=!K1;if (remd>160)㊀{goto endok;}㊀}㊀irdata[i1]=remd +2;㊀i1++;remd =0;}endok:㊀remd =0;㊀k =1;㊀㊀for (i =0;i<2;i ++)㊀㊀㊀㊀{for (j =1;j<=8;j ++)㊀㊀㊀㊀{cord =irdata[k];㊀㊀㊀㊀if(cord>75)㊀{val =val 0x80;}㊀㊀㊀㊀else {val =val;}k ++;}㊀IRcord[i]=val;㊀val =0;}K1=!K1;㊀Ir_down();㊀K1=!K1;㊀IE0=0;㊀EX0=1;㊀studykey =1;}[3]在程序中,单片机二P3^3引脚接收信号对乐谱信号进行红外解调,单片机二的相应输出口输出数据信号驱动继电器开关,实现机器手对钢琴键盘执行乐谱规定的时序升降动作,实现基于红外无线传输下的钢琴自动演奏机器人的设计及实现㊂4㊀基于红外无线传输下的钢琴自动演奏机器人创新及特色㊀㊀本设计思维目前国内尚无相关案例,具有创新意义㊂系统创造性地利用软件自定义红外无线通信标准,实现无线红外信号的调制解调㊂采用红外无线信号接收和传送乐谱内容创新性思维,有效地解决了单片机I /O(输入/输出)口不足的硬件设计瓶颈难题㊂采用无线传输和接收乐谱模式,理论上可以实现无数台钢琴同时演奏同一首歌曲㊂具有相当震撼的视觉㊁听觉效果,在现实实践中也有很多应用场景㊂设计经过精密硬件电路㊁配套软件设计及软硬件协调调试的过程,成功测试组装了基于红外无线传输下钢琴自动演奏机器人系统㊂系统软件简洁高效,硬件构成简单㊁价格低廉且稳定可靠,利于推广应用㊂设计不足之处在音乐演奏感情色彩方面,需要对机器手弹奏键盘的力度大小等方面进行智能化改进㊂红外无线传输下钢琴自动演奏机器人系统测试效果如图9所示㊂图9㊀红外无线传输下钢琴自动演奏机器人系统测试5 结语㊀㊀计算机及智能制造技术的飞速发展带动日常各类电气设备趋向智能化与自动化㊂本系统集成了计算机㊁自动控制㊁机械设计制造及自动化等多门学科,是智能化制造在家庭或公共领域应用的典型案例㊂对智能化制造领域的应用拓展具有较强的现实指导意义㊂产品可以广泛应用于各类产品展销会场,增加现场科技氛围㊂应用于中小学科普教育,激发中小学生科技创新梦想㊂系统改进完善后进一步应用推广,实现产品生产与销售产生经济效益㊂参考文献[1]宋雪松.手把手教你学51单片机C 语言版[M ].2版.北京:清华大学出版社,2020.[2]郭丽梅,施荣华.通信原理[M ].北京:中国铁道出版社,2018.[3]张元良,王建军.单片机开发技术实例教程[M ].北京:机械工业出版社,2010.[4]周朋.通信对抗干扰效果评估方法综述[J ].通信技术,2016(8):1029-1033.(编辑㊀王永超)Design of automatic piano playing robot based on infrared wireless transmissionSun ShanganJiangsu Shipping College Nantong 226010 ChinaAbstract The purpose of this design is to study the application prospect of intelligent manufacturing in piano automaticplaying music.The music score data is transmitted by the self -set infrared communication standard.The system transmits the music score data signal after infrared modulation through the infrared transmitting control module and theinfrared receiving control module receives and demodulates the infrared music score data signal.The singlechip reads and analyzes the data signal to control the switch of the relay drives the executing mechanism to execute the sequential lifting operation set by the music score on the piano keyboard and realizes the automatic piano playing of the robotunder the infrared wireless transmission of the music score.The design has the advantages of convenient installationlow cost stable performance and high intelligent degree.Key words data communication infrared signal intelligent manufacturing automatic playing。
无线电遥控器工作原理
无线电遥控器工作原理无线电遥控器的分类和组成要了解无线电遥控就必须首先知道什么是无线电遥控,无线电遥控就是利用电磁波在远距离上,按照人们的意志实现对物体对象的无线操纵和控制,这种无线控制的方式就叫做无线电遥控。
无线电遥控遥控技术的诞生,起源于无线电通讯技术,最初的构想是无线电电报技术的建立,真空电子管的发明使得无限电技术的应用和普及很快应用在民用和军用等各个领域。
在第一次世界大战时,无线电遥控应用较多的是在军事上,将遥控装置安装在鱼雷,当鱼雷发射后利用遥控鱼雷去攻击敌方的船只和舰艇,使得鱼雷的命中率大大的提高。
到了第二次世界大战时,纳粹德国又将无线电遥控系统安装在V——2火箭上,对英国伦敦进行了大规模的轰炸,在那时可以说无线电遥控技术发挥到了极至。
后来随着晶体管的发明和集成电路的诞生,无线电遥控技术达到了更加完善的程度,现如今我们所知道导弹、卫星、航天飞机等高科技技术都是利用无线电遥控技术的结晶,它已经不再是军事领域唯一成员,我们的日常生活可以说是已经离不了无线电遥控,如:遥控监视、报警、遥控电视、遥控玩具等等。
那么,无线电遥控是怎样划分的呢?又是怎样工作的呢?下面我们就来谈谈这个问题。
从无线电遥控的定义上看,所有能够实现无线遥控的控制系统,都应视为无线电遥控装置,为此我们按其发射和接收波谱频率上分,有音频声控、可见光控、红外线控、射频电磁波控和载频电磁波控等;按发射和接收的传输方式上分,有再生式、超再式、外差式、超外差式、等幅、调幅式和调频式等等;如果按发射和接收的载体性质上分,有单音频式遥控、双单音频式遥控、脉冲数字式遥控等等;如果我们按发射和接收的动作类型上分,有开关式、占空比式、脉宽式、脉位式、复合式、时分比例式和混合比例式等等;如果按发射和接收的通道数量上分,有单通道、双通道、四通道、八通道和十通道以上的多通道等等;如果再按发射和接收频率波长上分,有长波、中波、短波或低频、高频和甚高频等等;从发射和接收的电路组成上看,有分立元件、集成电路、模拟电路、数字电路、混合电路等等。
无线电装置在消防机器人遥控中的应用及挑战
无线电装置在消防机器人遥控中的应用及挑战消防机器人是一种可以代替人类进行危险消防任务的智能机器人。
在现代社会中,消防工作常常面临着危险、高温和狭小空间等挑战,因此使用消防机器人可以提高灭火效率、保护消防员的安全,并且减少人力资源的浪费。
而无线电装置在消防机器人遥控中的应用,可以使机器人的操作更加灵活和精确。
然而,这种应用也面临着一些挑战,如信号干扰和遥控距离限制等。
本文将探讨无线电装置在消防机器人遥控中的应用及挑战。
首先,无线电装置在消防机器人遥控中可以实现遥控操作。
消防机器人通常由遥控装置进行操控,而无线电装置则是连接遥控装置和机器人的关键技术。
通过无线电装置,操作人员可以远距离遥控机器人进行各种消防任务,如搜救被困人员、灭火、空气检测等。
这种遥控操作使得消防机器人可以进入狭小空间,避免了人类的危险和受伤风险,同时提高了工作效率。
其次,无线电装置在消防机器人遥控中可以实现实时数据传输。
消防机器人可以配备各种传感器,如热像仪、气体传感器等,用于获取火源位置、温度和有毒气体等关键信息。
通过无线电装置,机器人可以将这些数据实时传输给操作人员,从而实现远程监控和决策。
操作人员可以根据实时数据进行灭火方案的调整和优化,提高灭火效率和预防火灾扩散的能力。
然而,无线电装置在消防机器人遥控中也面临着一些挑战。
首先是信号干扰的问题。
在一些高温和狭小空间的环境中,信号可能会被建筑物结构和金属障碍物所阻挡或干扰,导致遥控信号不稳定或丢失。
这可能导致操作人员失去对机器人的控制,从而影响到救援任务的进行。
解决这个问题的方法可以是增强发射功率或者使用抗干扰的无线电技术。
其次,无线电装置在消防机器人遥控中还存在着遥控距离限制的问题。
目前的遥控装置通常只能实现几十米的距离遥控,这对于大型建筑物或者远距离火情监测来说是不够的。
因此,如何在保证稳定信号的前提下扩大遥控距离,是当前亟待解决的工程问题。
可能的解决方法包括采用更高频率的无线电波和设计更强大的接收设备。
机械遥控知识点总结图解
一、机械遥控的基本原理1. 机械遥控系统的组成机械遥控系统由遥控器、接收器和执行机构三部分组成。
遥控器是操控人员使用的手持设备,通常具有按钮、摇杆等操控元件,可以向接收器发送遥控信号。
接收器是安装在机械设备上的接收遥控信号的设备,通常具有解码、放大、转换等功能,能够将接收到的信号转化为驱动执行机构的信号。
执行机构是根据接收到的信号来实现特定动作的机械部件,比如电机、气缸等。
2. 机械遥控的工作原理机械遥控的工作原理是通过无线通讯技术将遥控器发送的信号传输到接收器上,然后由接收器将信号转化为驱动执行机构的信号,最终实现对机械设备的遥控操控。
3. 机械遥控的通讯技术机械遥控系统采用的通讯技术主要有红外线、无线电、蓝牙等。
其中,无线电通讯技术具有传输距离远、穿透能力强、抗干扰能力高等优点,因此在机械遥控中得到了广泛应用。
二、机械遥控的应用领域1. 工业生产在自动化生产线上,机械遥控技术可以实现对机械臂、输送带、搬运车等设备的远程操控,从而提高生产效率和安全性。
2. 农业种植农业机械设备如收割机、播种机等可以通过机械遥控技术实现远程操控,农民可以在远处操控设备进行作业,减少了人力成本和劳动强度。
3. 环境监测机械遥控技术可以应用于环境监测设备,比如远程控制气象站、水质监测设备等,方便人们对环境变化进行实时监测。
4. 科研实验在科研领域,机械遥控技术可以应用于飞行器、实验设备等的远程操控,提高了科研实验的灵活性和安全性。
1. 智能化未来机械遥控系统将更加智能化,可以实现自主学习、智能识别等功能,有效提高系统的易用性和可靠性。
2. 多功能化机械遥控系统将会融合更多的功能,比如视频监控、数据传输等,使得遥控系统成为一个多功能的智能终端。
3. 高性能化未来机械遥控系统将具有更高的传输速率、更快的响应时间和更稳定的通讯连接,确保系统的高性能运行。
通过本文的介绍,相信读者对机械遥控技术有了更深入的了解。
随着无线通讯技术的不断发展和机械遥控系统的不断完善,相信它在未来会有更广泛的应用场景和更高的性能表现。
无线电遥控器工作原理详细介绍

无线电遥控器工作原理介绍2008-07-09 07:14:21 来源: 作者: 【大中小】评论:0条无线电遥控器的分类和组成要了解无线电遥控就必须首先知道什么是无线电遥控,无线电遥控就是利用电磁波在远距离上,按照人们的意志实现对物体对象的无线操纵和控制,这种无线控制的方式就叫做无线电遥控。
无线电遥控遥控技术的诞生,起源于无线电通讯技术,最初的构想是无线电电报技术的建立,真空电子管的发明使得无限电技术的应用和普及很快应用在民用和军用等各个领域。
在第一次世界大战时,无线电遥控应用较多的是在军事上,将遥控装置安装在鱼雷,当鱼雷发射后利用遥控鱼雷去攻击敌方的船只和舰艇,使得鱼雷的命中率大大的提高。
到了第二次世界大战时,纳粹德国又将无线电遥控系统安装在V——2火箭上,对英国伦敦进行了大规模的轰炸,在那时可以说无线电遥控技术发挥到了极至。
后来随着晶体管的发明和集成电路的诞生,无线电遥控技术达到了更加完善的程度,现如今我们所知道导弹、卫星、航天飞机等高科技技术都是利用无线电遥控技术的结晶,它已经不再是军事领域唯一成员,我们的日常生活可以说是已经离不了无线电遥控,如:遥控监视、报警、遥控电视、遥控玩具等等。
那么,无线电遥控是怎样划分的呢?又是怎样工作的呢?下面我们就来谈谈这个问题。
从无线电遥控的定义上看,所有能够实现无线遥控的控制系统,都应视为无线电遥控装置,为此我们按其发射和接收波谱频率上分,有音频声控、可见光控、红外线控、射频电磁波控和载频电磁波控等;按发射和接收的传输方式上分,有再生式、超再式、外差式、超外差式、等幅、调幅式和调频式等等;如果按发射和接收的载体性质上分,有单音频式遥控、双单音频式遥控、脉冲数字式遥控等等;如果我们按发射和接收的动作类型上分,有开关式、占空比式、脉宽式、脉位式、复合式、时分比例式和混合比例式等等;如果按发射和接收的通道数量上分,有单通道、双通道、四通道、八通道和十通道以上的多通道等等;如果再按发射和接收频率波长上分,有长波、中波、短波或低频、高频和甚高频等等;从发射和接收的电路组成上看,有分立元件、集成电路、模拟电路、数字电路、混合电路等等。
课程设计——无线电远程遥控机械人校正
课程设计说明书学院:信息与通信工程学院专业:自动化题目:无线电远程遥控机械人校正一、串联滞后校正原理串联滞后校正是利用校正装置本身的高频幅值衰减特性,使系统零分贝频率下降,从而取得足够的相角裕度。
滞后校正具有幅值紧缩和相角滞后的特点,即产生负的相角移动和负的幅值斜率。
利用赋值紧缩,有可能提高幅值的稳固裕度,但将使系统的频带过小;从另一角度看,滞后校正通过赋值紧缩,还能够提高系统的稳固精度。
滞后矫正一样用于动态平稳性要求严格或稳固精度要求较高的系统。
用频率法对系统进行滞后校正的大体原理,是利用滞后校正网络的高频幅值衰减特性校正原系统的低频段,以达到改善系统稳态性能的目的。
滞后校正的利用处合:在系统响应速度要求不高而抑制噪声电平性能要求较高的情形下,可考虑采纳串联滞后校正。
维持原有的已知足要求的动态性能不变,而用以提高系统的开环增益,减小系统的稳态误差。
滞后校正的不足的地方是:校正后系统的截止频率会减小,瞬态响应的速度要变慢;在截止频率处,滞后校正网络会产生必然的相角滞后量。
应用频率法设计串联滞后校正网络的步骤如下:①依照稳态误差的要求,确信开环增益K 。
②依照所确信的开环增益K ,画出未校正系统的波德图,计算未校正系统的相角裕度γ、增益裕度h 。
③依照要求的相位裕量值"γ,确信校正后系统的开环截止频率"c ω,现在原系统的相角为εγωϕ++︒-=""c 180)(ε是用于补偿滞后校正网络在校正后系统开环截止频率处的相角滞后量。
通常取ε=5~12°。
④确信滞后网络参数b 。
b L clg 20)(0=''-ω求出b在校正后系统的开环截止频率处原系统的幅值与校正装置的幅值大小相等、符号相反。
⑤确信滞后网络参数T 。
取滞后校正网络的第二个转折频率为ω''=)101~51(1bT 求出T⑥画出校正后系统的波德图并验算性能指标是不是知足要求。
基于 PLC 的工业机械手无线遥控系统 高波,冯开林,张志兵,郑娟娟
基于PLC的工业机械手无线遥控系统高波,冯开林,张志兵,郑娟娟(山东科技大学,山东青岛 266510)摘 要:针对多关节工业机械手的比例和开关控制,以PLC作为其控制器,通过无线数传模块进行数据传输,实现远程无线遥控操作。
手持操作器采用16位单片机,对检测到的按钮和摇杆操作进行数据编码后通过无线的方式发送至PLC,PLC对其解码后获得指令实现对机械手各关节运动的控制。
该方案成本低,具有良好的通用性和可扩展性。
关键词:无线遥控;无线数传模块;PLC;机械手中图分类号:TP872 文献标识码:BTHE WIRELESS REMOTE CONTROL SYSTEM FOR INDUSTRIALMECHANICAL ARM BASED ON PLCGao Bo,Feng Kailin,Zhang Zhibing,Zheng Juanjuan(Shandong University of Science and Technology,Qingdao 266510,China)Abstract:In the proportion control and switch control of articulated industrial mechanical arm, the PLC is adopted as the controller, and a wireless data transmission module is introduced to design the wireless remote control system. The hand manipulator is designed with a 16-bit singlechip. The button manipulation and rocker manipulation are detected and coded as a data, and the data is transmitted to the PLC wirelessly. The PLC controls the mechanical arm by decoding the data. This scheme has a lower cost and better versatility and expansibility.Key words:wireless remote control;wireless data transmission module;PLC;industrial mechanical arm0.前言可编程序逻辑控制器(Programmable Logic Controller,PLC)是一种适用性强的工业用控制器,广泛应用于各类工业生产线,移动机械设备的控制等环境较恶劣的工业场合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用无线电遥控数字编解码及比例伺服电路实现的遥控机械人内容目录1、2、3、4、引言设计概述硬件构成软件描述1、引言随着现代电子技术的发展,无线电遥控的车、船、飞机和机器人已不罕见。
将来必定普及到人类活动的各个领域。
这方面的技术虽已比较成熟,但在普及应用上还有许多困难。
对于普及方面来说,最大的障碍是成本太高。
而无线电传输和控制及伺服系统占了很大的比例。
因此,一种功能全面,价格低廉的控制芯片急待解决。
它有着广泛的应用领域和众多的需求量。
从上面的需要考虑,本项目通过两片廉价的MCU,配合无线电发收电路及少量的外围器件来实现无线电遥控机器人系统。
2、设计概述该系统能通过无线电遥控指挥机器人以不同的速度前进、后退、转弯;控制机械臂左右、上下转动,这个动作要求是要很准确的控制到所指定位置;机械手可以力量适中地夹起适当重量的物品。
其辅助功能还有照明、声音提示和电源不足报警等功能。
该系统电路主要分成两大部分:第一部分输入转换、指令编码、发射部分和第二部分接收、解码、伺服部分。
其中,第一部分的输入转换、指令编码部分用一片68HC908LJ12实现(选用该型号主要是因为LCD驱动)。
它完成五个模拟量的AD转换、所有动作的动作范围调节和起始点的设定、电池电压的检测、编码和无线电发射控制。
第二部分的解码、比例伺服部分用68HC908SR12实现(选用该型号主要是因为PWM)。
它完成解码、五个比例伺服舵机信号的控制(控制机械臂和机械手等用)、电机无级调速控制(机器人行走速度和方向控制)及所有的其它状态检测和输出控制。
2.1、系统的功能和主要特点:1、电路造价低—以68HC908LJ12和68HC908SR12为核心2、外围元件少—输入转换、指令编码部分除稳压电路和LCD显示屏几乎没有其它器件;解码、比例伺服控制部分也只有很少的外围器件。
3、无线电编码信号能可靠及时地传输和解码(可在一定干扰环境中使用)4、解码后的比例伺服信号能准确地控制机器人做要求的动作。
5、可配套不同的执行器完成不同的功能6、操作容易掌握7、系统即具有独立完整的功能,既可简化功能,进一步降低成本。
用于控制各种模型,甚至玩具。
又可将多片电路组合完成复杂功能的功能更强大的机器人。
2.2、系统的设计2.2.1 设计思想和技术关键一个遥控的机械人系统需要做到控制及时准确,否则就无任何意义。
要做到这一点,编码信号通过无线电波传输的过程中接收部分能准确的甄别出编码信号是一个关键的地方。
不能把不是发射编码的信号用来解码,也不能遇到一点电波干扰就不解码。
要达到这一效果除技术上要采取窄带无线传输、编码中设计特征码和一些融错设计外,还采取了回避的方法。
就是不采用数据传输的编码方式。
因为现在手机、BP机、子母电话等无线设备非常多。
这样可避免这一类信号万一与我们的系统同频时,干扰系统产生误动作。
为了降低硬件成本,采用能满足控制速度要求的最低波特率。
实现设计思想的单片机是极为重要的。
它的可靠性和片上资源是选择的关键。
如一片单片机的资源不足,还要另加其它芯片,就会给系统的可靠性、外型体积、造价带来很多负面的影响。
MC68HC908LJ12 单片机对程序安全运行有较全面的保护,片上资源包含了发射机部分的全部需要。
同样,MC68HC908SR12 单片机也对程序安全运行有较全面的保护,片上资源包含了接收部分的全部需要。
为了降低整机成本,司服机没有选用价格较高的步进电机,用的是普通司服电机。
普通司服电机的价格比步进电机价格低很多。
但控制精度不如步进电机。
行走的动力用的是普通电机。
电机速度控制是用调整电压占空比的方法实现的。
它的优点是能源利用率高,电机速度控制均匀。
但这种方法会产生电波干扰,处理不当会影响编码信号的接收。
电机的正反转是用继电器换向的。
这种电路简单可靠、过载能力强、成本低。
但比用功率管组成的桥路换向电路,它的寿命要差得多。
而且继电器自身的电量消耗也比较大。
出于这一点,在实际应用中是需要斟酌的。
当不是很方便就可以更换电池时或需要一组电池工作较长时间等情况时,前一种方案是不可取的。
当然前一种方案在造价方面很有优势。
还有一个很重要的设计考虑,接收部分MC68HC908SR12的程序稍作调整就可以用几片组合成一个功能很强的机械人。
如拟人的----有四肢、头、身体,可步行也可用轮子行走。
手臂的功能可与人的手臂接近。
而发射机部分则还是用一片MC68HC908LJ12 单片机就可以了。
2.2.2 系统的功能和工作过程系统有发射机和机械人两大部分。
操作人员手持发射机操作。
机械人可在平面行走。
在无干扰的情况下控制半径大于100米(已超过可视距离)。
发射机上的操作杆分别对应着机械人的相应动作。
机械臂可90度角范围内任意角度停留(可设计成180度或270度也可以更大)。
机械臂的高度和机械手的收放也是在一定范围内可调的。
在机械人上有转向指示(操作人员控制)、后退指示(自动)。
当电池的电压不足时会发出警报如机械人工作环境光线不足,可打开照明灯。
2.3、系统框图:图2.1为第一部分输入转换、指令编码、发射部分,图2.2为第二部分接收、解码、伺服部分3、硬件描述本系统硬件有两大部分:输入转换、指令编码、发射部分和接收、解码、伺服部分----一下简称发射部分和接收部分。
3.1、发射部分发射机部分的原理图见图3.1图3.1发射机原理图从图中可以看出,核心器件是摩托罗拉的M68HC908LJ12 单片机。
它配合很少量的外围元件完成了输入信号转换、LCD显示、控制参数的调整和记忆、指令编码、电源电压检测的全部功能。
下面具体介绍。
3.1.1 模拟信号输入电路本系统中有五个模拟输入信号ADC0—ADC4,分别用来控制行走的方向、速度、机械臂的位置、高度和收放状态。
这些控制量都要求把机械角度转换成比例的编码信号(解码时再转换成对应的角度或电机的相应转速)。
这五路信号的转换方法是一样的。
先通过电位器P1---P5将机械角度转换成电位信号,再将电位信号通过单片机的AD转换器转换成对应的数字信号。
然后再将各路数字信号按编码要求转换成编码信号送到发射电路调制输出。
3.1.2 开关信号输入电路S1、R1;S2、R2、R3;S3、R4 组成了三组四个开关信号的输入。
这些信号是通过开关控制输入脚PTD4、PTD5、PTD6、PTD7 的电位实现信号输入的。
当S1 闭合时,接收机上鸣镝电路启动发出提示声音。
S2 控制转向指示灯。
S3控制照明灯。
3.1.3 参数的设定、保存与显示系统中的一些参数需要预先设定好,并且要长期保存。
在参数调整的过程中需要随时清楚参数的当前状态。
因此选择了LCD 显示。
这就需要单片机具有LCD 显示器的驱动能力。
以上的这些功能正是MC68HC908LJ12 单片机具备的功能。
也就是选择该型号单片机的原因。
参数设定是通过由KG、KGH、KGL组成的键盘配合单片机完成的。
在FLASH 区留出一点区域,仿EE-ROM 使用就可实现数据的永久保存(在Monitor ROM中有相应的应用程序)。
因单片机中有LCD 驱动电路,就不需要另加LCD驱动模块,降低了许多成本,电路也简单了。
3.1.4 声音输出和电源监控T1、R8 和蜂鸣器组成了声音输出的功率放大电路。
音频信号由单片机产生,通过T2CH0脚输出。
声音输出用于输出电源电压过低时的警报和写入FLASH 完成的声音提示。
3.1.5 编码信号编码信号由T1CH0输出到发射电路的调制端发射出去。
未标号的电容是为滤除射频干扰而设置的。
3.2 接收部分接收部分的原理图见图3.2图3.2 接收机原理图接收机的核心器件是摩托罗拉的M68HC908SR12 单片机。
它配合很少量的外围元件完成了指令解码、电机转速控制、司服机控制信号输出、声音输出、灯光控制和电源电压检测的全部功能。
下面具体介绍。
3.2.1 行进速度和方向控制R1、R2、T1、V1、V2、V3组成了电机速度控制的功率放大电路。
三极管T1将单片机PTD7脚输出的电机速度控制信号(PWM信号)的电平由VDD转换成VCC(相位反向)。
这是VMOS 管阈值电压的需要。
T1的输出驱动三个VMOS 功率管带动电动机转动。
输出信号的电压占空比不同电动机M 的转速随之不同。
R3、T2、J1;R4、T3、J2组成的电路为电动机转动方向控制信号提供功率放大。
当PTD6 输出高电平、PTD5 低电平时,T2导通,J1吸合,T3截止,J2不吸合;在PTD7有输出信号时电机正转。
当PTD5 输出高电平、PTD6 低电平时,T3导通,J2吸合,T2截止,J1不吸合;在PTD7有输出信号时电机反转。
3.2.2 司服机控制量行走的方向控制由T2CH0输出控制信号,通过司服机1完成。
机械臂的方向控制由PWM0输出控制信号,通过司服机2完成。
机械臂的高度控制由PWM1输出控制信号,通过司服机3完成。
机械手的收放控制由PWM2输出控制信号,通过司服机4完成。
3.2.3 转向指示和后退指示当有转向指示信号和后退行走时L4、L5、L6、L7会分别发光,做出指示发射机上的S2 打到右边,L4、L6闪动发光。
打到左边,L5、L7 闪动发光。
当向后行走时,L6、L7 发光。
3.2.4 鸣笛和电源不足警报输出R6、T4 组成了声音输出功率放大电路。
通过这部分电路将单片机的T2CH1脚的声音信号放大,驱动扬声器发出声音。
3.2.5 照明输出R5、V4 是照明的驱动电路。
它将单片机的PTA5脚的控制信号放大,保证点亮照明灯。
3.2.6 电源电压监测通过R11和R12对VCC进行分压。
保证VCC在最高电压时单片机ATD5脚的电位不高于VDD从以上的硬件介绍中可以看出,无论是发射电路还是接收电路,其外围器件都是信号转换电路、显示器件和功率放大器件。
这说明所有的功能都是由MC68HC908LJ12和MC68HC908SR12完成的4、软件描述软件同样分两大部分:输入转换、指令编码、发射部分---简称发射部分;接收、解码、伺服部分---简称接收部分。
4.1 发射部分发射部分的主程序流程图见图4.1这部分程序完成输入信号转换、电源电压监测、参数的修改和运算、状态显示、修改后的参数永久保存、指令编码及输出六大功能。
4.1.1 输入转换有六路模拟输入信号需要做AD转换。
其中有5路是控制信号,一路是电源电压监测信号。
采用在每个编码周期内循环采样一次的方法,保证每次编码是使用的数据是最新的。
4.1.2 电源电压监测当ADC5的电位低于警戒线时,程序启动T2CH0的PWM输出,发出电源电压过低警报。
4.1.3 参数的修改和运算由KGH、KGL、KG组成的键盘对应的输入端PTA0、PTA1、PTA2完成参数修改的功能。
这组键盘是采用查询方式输入的,未采用键盘中断。