具有抑振功能的超精密微动平台
高精度运动控制系统的关键技术及综合运用

装配工艺中应注意的问题
设备的装配质量受到多方面因素的影响,除了技术、工艺方面的问题以外,还与装 配工人的人为因素有关,这里我们重点介绍一下位置反馈传感器的选取与安装 光栅传感器精度的决定因素
光栅尺的精度 线距,或信号周期(每毫米线数,或每圈线) 光栅尺的热敏系数 差值技术 信号质量
旋转编码器最大速度 = [工作频率 (Hz) / (每转线数) ]*60 [RPM] 线性编码器最大速度 = [扫描频率(Hz)*信号周期 (micron) ]*10e-6 其中 信号周期 = 测量步距 (micron) * 细分倍数 * 4 [micron]
高精度运动控制系统的应用
龙门式双轴直线电机平台
构成:CNC(控制卡)+驱动+电 机+反馈 控制模式:位置/速度/力矩 控制接口:总线/模拟/脉冲 定位分辨率:0.5um-5um 重复定位精度:10um 最大加速度:5g 特点:多轴联动,精度高,功能 强,价格偏高 应用领域:数控机床、激光设备 、封装设备、测试测量
伺服驱动器的选择
HN伺服控制驱动器是一种通用型的 伺服控制驱动器,可驱动交流无刷旋 转电机和交流无刷直线电机等伺服电 机。该驱动器采用DSP作为核心控制 芯片,使用全数字电机控制算法,实 现了电流环、速度环、位置环的闭环 控制,此外该驱动器还具有:微动换 相、电机参数识别、控制参数自整定 、高阶运动轨迹生成、共振抑制、用 户程序控制等功能。
慧摩森
高精度运动控制系统 ----关键技术及综合运用 关键技术及综合运用
北京慧摩森电子系统技术有限公司
公司简介( 公司简介(一)
北京慧摩森电子系统技术有限公司是以开发生 产高精度运动定位系统为主的高新技术企业,所研 发产品集成光机电一体化技术,采用的技术和产品 精度达到国际先进水平。 目前直线电机在运动控制领域的应用越来越广 泛,我公司所生产的SM系列直线电机性能稳定, 质量好,与PWM的驱动控制器及直线光栅编码器组 成伺服运动系统,代替传统的丝杠和皮带传动结构 形式,简化了结构,提高了运动控制系统的性能。 公司自主研制的0.1微米级精密运动平台及集成 控制系统是微电子制造和测试设备的核心部件,也 是生物医疗设备和精密制造业发展的关键部件,这 些产品在以上领域的应用可以极大提高我国的制造 水平,缩小和先进国家的差距。
HN 系列通用伺服控制驱动器

HN系列通用伺服控制驱动器HN Series Servo Driver总经销:北京慧摩森电子系统技术有限公司Beijing SmartMotion System Technology Inc.秦皇岛海纳科技开发有限公司HN系列伺服控制驱动器是一种通用型的伺服控制驱动器,以数字信号处理器(DSPs)作为核心控制芯片,采用了先进的全数字电机控制算法,以软件方式实现了电流环、速度环、位置环的闭环伺服控制,具备良好的鲁棒性和自适应能力,可配合交流无刷旋转电机、交流无刷直线电机,以及直流电机和音圈电机,组成伺服控制系统。
产品广泛应于需要快速响应的精密速度控制,特别是定位控制的应用系统,如半导体生产设备数控机床印刷机械包装机械造纸机械塑料机械纺织机械工业机器人自动化生产线等。
产品特性1.通用性可以实现对交流无刷旋转伺服电机和直接驱动直线伺服电机的控制,可以驱动直流电机和音圈电机等单相伺服电机;2.易用性强大的软件控制功能,可以通过上位机设定控制命令,改变电机的控制模式及运行方式;3.实用性a.共振抑制功能,自动分析系统共振点并设定相应的滤波器参数以消除系统机械共振;b.速度前馈和加速度前馈功能,提高系统的命令跟随能力;c.高阶平滑技术,以有效消除机械系统震荡;d.多种换相模式,六步换相、正弦换相, 可同时实现旋转、直线电机的微动启动;e.电子齿轮比设定功能,对上位控制器发出的位置脉冲命令进行放大或缩小的处理;4.灵活性控制驱动器具有位置环、速度环和力矩环下的多种控制方式,具备脉冲+方向单极性、以及差分或正交脉冲输入接口,模拟输入接口,电机反馈接口,串行通讯接口及可编程I/O接口;5.可靠性完善的保护功能及报警模式可确保系统长时间稳定运行。
主要技术指标型号 HN-4/150 HN-4/400 HN-6/400 HN-10/400持续电流(A ) 4 4 6 10 峰值电流(A ) 8 8 12 20 额定电压(V ) 100 300300300 额定功率(W ) 400 120018003000控制电压(V ) 24VDC工作模式 力矩模式、速度模式、位置模式控制接口±10V 模拟电压、PWM 、脉冲加方向、正交脉冲电流环:2KHz速度环:500Hz 旋转电机位置环:200Hz 电流环:1.5KHz 速度环:300Hz 频率响应直线电机位置环:150Hz电流环20KHz 速度环10KHz 采样率位置环5KHz 特性速度波动率<±0.1%(空载,额定转速下)RS232指令脉冲+方向≤2MHz 控制方式正交脉冲≤2MHz 反馈输入 增量式编码脉冲20Mcount(5M pulse)位置控制电子齿轮比0.01-100RS232指令模拟输入-10V ~+10VDC PWM50%占空比1KHz ~100KHz 速度和力矩控制控制方式PWM100%占空比+方向1KHz ~100KHz 保护功能 短路、过流、过压、欠压、过热等高级功能微动换相、电机参数辨别、PID 参数自整定、高阶运动轨迹生成、共振抑制、用户程序控制等。
调谐质量阻尼器TMD

NO.4 TMD能否用于抗震 1、进行风时程工况下TMD方案与阻尼器方案减震效果对比 由表可见,在加设TMD或阻尼器以后,楼层加速度、基地位移角、基底剪力和弯矩都有明显 改善,且本次试验的阻尼器方案减振效果尚略优于TMD方案。
NO.4 TMD能否用于抗震
2、进行地震程工况下TMD方案与阻尼器方案减震效果对比
NO. TMD在工程上的应用 3二、纽约Citicorp中心
Citicorp中心高279m,大楼底部仅设 置了4根粗大的柱子支撑整个大厦,水 平刚度较柔,在强风作用下,水平摆 动很大,该大楼最后采用了约 3630KN重的混凝土调频质量块。
该TMD安装于建筑的59楼,在这个高 度,建筑物可以用一个约为20000t的 简单模态质量表设计,TMD固定于其 上形成图二所示的2-DOF系统。实验 结果和实际观测显示,TMD能将建筑 的风致加速度水平减少约50%。
TMD构造布置的多样性
NO.2
各种形式的TMD
TMD构造布置的多样性
TMD在工程上的应用
NO.3
一、澳大利亚悉尼Centerpoint塔 TMD在工程上的应用
安装TMD的第一个结构是悉尼的Centerpoint塔。作为结构的供 水和防火设施,塔的水箱和一个液压吸振器一起被设计到TMD中 用以减小风致运动。水塔悬挂于回转塔的径向构件上,随后又将 一个40t重的辅助质量安装在中间锚固环上以进一步控制第二振型 的振动。加速度测定结果表明,风致加速度响应减少了40%— 50%。 单摆型TMD结构的例子还包括加拿大多伦多CN塔、位于日本 Osaka的水晶塔等。其中高157m的水晶塔也利用了置于结构顶部 的储水箱作为单摆TMD。
D在工程上的应用
三、合肥电视塔 NO.3 由加速度响应比例来看,最优的频率比和最优阻尼比分别是1.02和 0.07。最大的加速度减振率达到了49%。 为获得电视塔风振响应的最大减振率 需要进行TMD参数的优化分 析从而确定TMD的三个重要参数即质量、频率和阻尼比。由于电视 塔的风振响应是以第一振型为主,故TMD 应调谐至结构第一阶频 率。设计时水箱总质量为60000kg,故TMD质量即为60000kg, 因而TMD 与电视塔第一阶振型广义质量的比值为0.0196 。固定质 量比,变化TMD与结构第一振型的频率比和TMD阻尼比可计算出 各种控制情况下电视塔(以第12质点响应为代表)和TMD的位移和 加速度响应。
高精度运动控制系统的关键技术及综合运用ppt课件

3
公司简介(二)
此外公司还与秦皇岛海纳科技公司 合作研发了国内首款可驱动直线电机和 旋转电机的通用型伺服驱动器。该驱动 器具有高阶轨迹生成、支持用户编程等 高端功能,产品性能已达到国际先进水 平,可广泛用于高精密运动控制系统的 驱动和控制。
17
总结
❖ 运动控制技术是多学科复合技术:机械与电子、硬件和软件、算法 和分析
❖ 运动控制应用范围广:开环控制或闭环控制、半闭环或全闭环控制 ❖ 采用闭环控制首要考虑的是系统稳定性 ❖ 运动控制的性能不仅要考核时域响应,还要考核频域特性 ❖ 运动控制系统由控制平台、功率放大器/驱动器、执行机构/电机/
安装误差的影响
15
实例:编码器安装对信号质量及精度的影响(续) 信号质量对误差影响
16
运动控制系统的保护
软件级 •计算错误保护 •位置误差保护 •饱和保护 •震荡保护 •RMS功率保护 •电源故障保护 •急停保护
机械级 •机械限位装置 •机械刹车/卡紧装置 •机械防撞装置 •… …
硬件级 •限位传感器保护 •看门狗保护 •电源故障保护 •过功率保护 •驱动器短路保护 •驱动器过压/欠压保护 •驱动器过温保护 •驱动器RMS电流保护 •… …
➢ 光栅尺的精度
➢ 线距,或信号周期(每毫米线数,或每圈线)
➢ 光栅尺的热敏系数
➢ 差值技术
➢ 信号质量
➢ 频率响应与最高速度
旋转编码器最大速度 = [工作频率 (Hz) / (每转线数) ]*60 [RPM]
柔性铰链微动平台设计
柔性铰链微动平台设计概述柔性铰链微动平台是一种具有高灵活性和精确控制能力的微型机械系统,在多个领域中发挥着重要作用。
本文将介绍柔性铰链微动平台设计的综述,包括其工作原理、设计要求、设计流程和应用案例等。
工作原理柔性铰链微动平台是基于柔性铰链机构设计的微型机械平台。
柔性铰链机构由一系列具有可弯曲性能的连接件组成,通过这些连接件的柔性变形,实现平台的微动控制。
具体来说,柔性铰链微动平台的工作原理如下:1.柔性铰链机构的变形: 通过施加力或扭矩,柔性铰链机构的连接件发生变形,从而改变平台的位置和姿态。
这种柔性变形具有较大的位移范围和高精度的响应能力。
2.控制系统的反馈: 在柔性铰链微动平台上安装传感器,监测平台的位置和姿态。
这些传感器将实时反馈到控制系统中,以便根据需求调整施加在柔性铰链机构上的力或扭矩。
3.控制策略的实施: 根据控制系统的反馈信息和预设的控制策略,控制系统通过执行合适的控制算法,实现对柔性铰链机构的控制。
这样,就实现了平台的精确位移和姿态控制。
设计要求设计柔性铰链微动平台时,应满足以下要求:1.柔性性能: 连接件应具有足够的柔性,能够实现平台的精确位移和姿态控制。
同时,连接件的变形应具有稳定的特性,以保证平台的可靠性和重复性。
2.结构刚度: 平台的柔性铰链机构需具备一定的结构刚度,以保证在外力作用下的稳定性和抗扭性能。
同时,在高精度控制要求下,结构刚度也可减小位移误差。
3.传感器选择: 选择合适的传感器用于监测平台的位置和姿态。
传感器应具有高精度、高灵敏度和快速反应的特点,以确保系统控制的准确性和稳定性。
4.控制系统设计: 设计合适的控制系统,能够接收传感器反馈信息,并根据预设的控制策略实现对柔性铰链机构的控制。
控制系统应具有高精度、高稳定性和高响应性能。
5.应用场景适应: 根据具体的应用需求,设计柔性铰链微动平台时应考虑适应不同环境和工况的要求,例如温度、湿度和尺寸约束等。
设计流程设计柔性铰链微动平台的流程一般包括以下几个步骤:1. 确定需求和应用场景在设计柔性铰链微动平台之前,首先需要明确需求和应用场景。
NZB6001 微机 PT 测控装置 使用说明书
目录
1 概述................................................................................................................................................. 1 1.1 适用范围.....................................................................................................................................1 1.2 功能配置.....................................................................................................................................1 1.3 性能特点.....................................................................................................................................1 2 技术性能及电气参数.....................................................................................................................2 2.1 额定电气参数...............................................................................
大族 l20h-d技术参数
大族l20h-d技术参数1.引言1.1 概述在当前的快节奏社会中,技术的发展日新月异。
大族l20h-d作为一种先进的技术,在不断地推动着科技创新和工业升级的进程。
本文将对大族l20h-d技术参数进行全面而深入的介绍。
大族l20h-d是一种高性能的技术,具有出色的特点和功能。
该技术采用了一系列先进的工艺和材料,使得其在多个领域拥有广泛的应用。
无论是在电子行业,还是在通信领域,大族l20h-d都展现出了其强大的实力和威力。
首先,大族l20h-d具有卓越的可靠性和稳定性。
通过优化装置的内部结构设计,该技术能够在恶劣的环境下保持稳定的运行状态,并且能够在长期使用过程中保持高效的性能。
这种可靠性是大族l20h-d在行业中广受好评的重要原因之一。
其次,大族l20h-d还具有出色的性能指标。
该技术在处理速度、效能和功耗等方面表现优异。
通过采用先进的制造工艺和优质的材料,大族l20h-d不仅能够达到高性能的要求,而且能够在工作过程中节约能源,减少资源消耗。
此外,大族l20h-d还具备广泛的适用性。
无论是在电子芯片制造、光纤通信、还是在医疗和航天等领域,大族l20h-d都能够发挥出其独特的优势。
它的应用范围广泛,能够满足各种行业的不同需求。
综上所述,大族l20h-d技术通过其卓越的可靠性、出色的性能指标以及广泛的适用性,已经在多个领域展现出了巨大的潜力和应用价值。
相信随着科技的不断进步,大族l20h-d技术将会在未来发展中继续发挥重要作用,为人类的创新和发展提供强有力的支持。
文章结构:文章结构是指文章的整体组织框架,它对于文章的逻辑性和可读性至关重要。
一个良好的文章结构可以使读者更好地理解和吸收文章的内容。
本文将按照以下结构进行展开:1. 引言1.1 概述在引言部分,我们将简要介绍大族L20H-D的技术参数,并引起读者对该产品的关注。
1.2 文章结构本节将详细介绍文章的整体结构,包括各个章节的内容和目标。
1.3 目的在本节中,我们将明确本文的目的,即探讨大族L20H-D的技术参数及其在相关领域的应用。
【国家自然科学基金】_精密运动平台_基金支持热词逐年推荐_【万方软件创新助手】_20140731
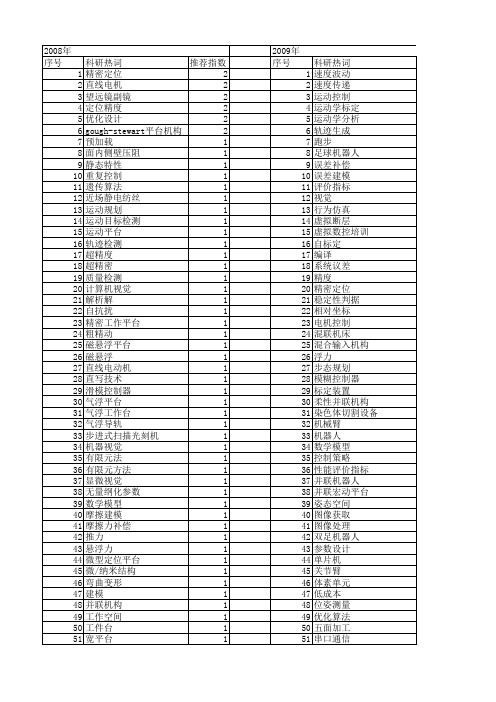
科研热词 速度波动 速度传递 运动控制 运动学标定 运动学分析 轨迹生成 跑步 足球机器人 误差补偿 误差建模 评价指标 视觉 行为仿真 虚拟断层 虚拟数控培训 自标定 编译 系统议差 精度 精密定位 稳定性判据 相对坐标 电机控制 混联机床 混合输入机构 浮力 步态规划 模糊控制器 标定装置 柔性并联机构 染色体切割设备 机械臂 机器人 数学模型 控制策略 性能评价指标 并联机器人 并联宏动平台 姿态空间 图像获取 图像处理 双足机器人 参数设计 单片机 关节臂 体素单元 低成本 位姿测量 优化算法 五面加工 串口通信 三维实体测量
科研热词 推荐指数 精密定位 2 直线电机 2 望远镜副镜 2 定位精度 2 优化设计 2 gough-stewart平台机构 2 预加载 1 面内侧壁压阻 1 静态特性 1 重复控制 1 遗传算法 1 近场静电纺丝 1 运动规划 1 运动目标检测 1 运动平台 1 轨迹检测 1 超精度 1 超精密 1 质量检测 1 计算机视觉 1 解析解 1 自抗扰 1 精密工作平台 1 粗精动 1 磁悬浮平台 1 磁悬浮 1 直线电动机 1 直写技术 1 滑模控制器 1 气浮平台 1 气浮工作台 1 气浮导轨 1 步进式扫描光刻机 1 机器视觉 1 有限元法 1 有限元方法 1 显微视觉 1 无量纲化参数 1 数学模型 1 摩擦建模 1 摩擦力补偿 1 推力 1 悬浮力 1 微型定位平台 1 微/纳米结构 1 弯曲变形 1 建模 1 并联机构 1 工作空间 1 工件台 1 宽平台 1 宏/微双重驱动 1
1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78
2011年 科研热词 坐标变换 高精度 高加速度 面阵ccd 非线性控制 静电驱动 键合图 锁相环 钢丝绳 运动耦合 运动平台 运动分析 软性磨粒流 跟瞄机构 超精密运动 超精密定位平台 超声电机 结构化表面 精密定位平台 筒形件旋压 空间电压矢量调制 磁悬浮直线运动 磁悬浮 相对运动 直线电机 直线伺服驱动 电机转速 灵巧度 液滴 波导器件封装 波导器件 永磁同步电机 模态分析 模场耦合 柔顺并联机构 有限元分析 有限元 新型驱动机构 数字信号处理器 数值模拟 控制系统 振型 扫描平台 微流控芯片 微动平台 微分几何 开放式结构 并联运动装备 并联机构 并联机器人机构 并联机器人 工作空间测量定位系统 推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
SinOne SC92F844XB 超高速1T 8051内核工业级Flash微控制器说明书
超高速1T 8051内核Flash MCU ,1 Kbytes SRAM ,16 Kbytes Flash ,128 bytes 独立EEPROM ,31通道可低功耗双模触控电路,12位ADC ,1个模拟比较器,LCD/LED Driver ,12位PWM ,3个定时器,乘除法器,UART ,SSI ,Check Sum 校验模块Page 1 of 105 V0.1SinOneSC92F8447B/8446B/8445B1 总体描述SC92F8447B/8446B/8445B (以下简称SC92F844XB )系列是一颗增强型的超高速1T 8051内核工业级Flash 微控制器,指令系统完全兼容传统8051产品系列。
SC92F844XB 集成有16 Kbytes Flash ROM 、1 Kbytes SRAM 、128 bytes EEPROM 、内置有31路高灵敏度隔空电容触控电路、最多46个 GP I/O 、16个IO 可外部中断、3个16位定时器、17路12位高精度ADC 、1个模拟比较器、8路12位PWM 、IO 驱动分级控制(LED segment 口)、1个16 ×16位硬件乘除法器、内部±1%高精度高频16/8/4/1.33MHz 振荡器和±4%精度低频128K 振荡器、可外接晶体振荡器、UART 等通讯接口等资源。
为提高可靠性及简化客户电路,SC92F844XB 内部也集成有4级可选电压LVR 、2.4V 基准ADC 参考电压、低耗电WDT 等高可靠电路。
SC92F844XB 具有非常优异的抗干扰性能,非常适合应用于各种物联网控制、大小智能家电和智能家居、充电器、电源、航模、对讲机、无线通讯、游戏机等工业控制和消费应用领域。
2 主要功能工作电压:2.4V~5.5V工作温度:-40 ~ 85℃ 封装:SC92F8447B (LQFP48) SC92F8446B (LQFP44) SC92F8445B (LQFP32)内核:超高速的单字节指令 1T 8051Flash ROM :16 Kbytes Flash ROM (MOVC 禁止寻址0000H~00FFH 的256 bytes )IAP :可code option 成0K 、0.5K 、1K 或16KEEPROM :128 bytes ,无需擦除,10万次写入,10年以上保存寿命SRAM :内部256 bytes+外部768 bytes+PWM&LCD RAM 44 bytes系统时钟(f SYS ): ● 内建高频 16MHz 振荡器(f HRC )● IC 工作的系统时钟,可通过编程器选择设定为:⏹ *********~5.5V⏹8/4/***********~5.5V●频率误差:跨越 (3.0V~5.5V) 及 (-20 ~ 85℃) 应用环境,不超过 ±1%内置低频晶体振荡器电路: ● 可外接32K 振荡器,作为Base Timer 时钟源,可唤醒STOP内建低频 128kHz LRC 振荡器:● 可作为BaseTimer 的时钟源,并唤醒STOP ● 可作为WDT 的时钟源●频率误差: 跨越 (4.0V ~ 5.5V) 及 (-20 ~ 85℃),频率误差不超过 ±4%低电压复位(LVR ): ● 复位电压有4级可选: 4.3V 、3.7V 、2.9V 、2.3V● 缺省值为用户烧写Code Option 所选值Flash 烧写和仿真: ● 2线JTAG 烧写和仿真接口。
Flexiv Robotics自适应机器人产品手册说明书

非夕科技关于FLEXIVFlexiv非夕科技是一家全球技术领先的通用智能机器人公司,延着仿人化技术创新路径,非夕专注于研发、生产集工业级力控、计算机视觉和人工智能技术于一体的自适应机器人产品,为不同行业的客户提供基于非夕机器人平台型产品的创新性解决方案和服务。
非夕于2016年成立,核心创始团队来自斯坦福大学机器人和人工智能实验室。
目前,非夕已在硅谷、上海、北京、深圳、佛山、台湾、新加坡等地区设立办公室。
2022年,非夕科技成长为通用机器人领域的独角兽企业。
自适应机器人是沿着仿人化技术路线打造的、深度融合工业级力控和先进AI技术的通用智能机器人产品。
仿人化技术理念旨在让机器人能够像人一样以手感调整为主、视觉引导为辅,在本能反应和条件反射的基础上,不断领悟和精进自身技能。
因此,自适应机器人能够适应复杂环境,以类人的方式完成多种复杂任务。
误差容忍度高抗干扰性强可迁移工作能力强在生产线上,误差可能来自于产品公差、工艺误差或受力下发生的形变、装配或检测流程积累的误差、AI视觉的系统误差等,这些都无法完全避免。
自适应机器人可以补偿这些误差,确保机器人完成工作的能力。
当机器人的基座(AMR)晃动,机器人上装配的工具产生震动,或者有人类触碰干扰时,自适应机器人都可以很好地抵消或顺应干扰,完成工作任务,也因此比过去的任何机器人都更加适应不确定的生产环境。
第三代自适应机器人具备基于力控和视觉的层级式智能,只需简易配置便可处理大量相似又不完全相同的工作任务,例如通过同一生产线来装配一些外形不同、装配手法相近的零件或者接插件,解决过去生产线上部署成本高的问题。
操作对象自适应环境自适应任务自适应RIZON 4RIZON 4s RIZON 10RIZON 10s MOONLIGHTAI云平台边缘AI系统周边配件GRAV系列夹爪AGV 工业相机更多NOEMA EDGENOEMA CLOUD穹知边缘控制器机器人控制箱NON-REALTIME REALTIMEINTERNET现场部署面向工程人员的任务编辑系统面向开发者的开发工具包为什么选择自适应机器人?降低自动化一次性投入成本降低自动化部署成本降低后期维护成本优化总体拥有成本适应多品种的工件,提升产线生产兼容性综合提高产线良率、换线效率和设备复用率升级产线柔性人类般手眼配合精细操作适应更多复杂任务适应开放式和复杂环境实现更多应用围绕自适应机器人的全面平台型产品线(即将推出)与 兼容Rizon 4Rizon 4s Rizon 10世界上首台自适应机器人七自由度工业级力控独有创新性的力/力矩传感技术获CE&ETL双安全认证更强大的力控表现满足更复杂的应用场景更强抗干扰实现全身多点力控更广的力作用范围适应多种高负载场景更高负载始终如一的灵巧和全身力控Grav Enhanced增强型Grav标准版MoonlightMOONLIGHT 玄晖力控型自适应并联机器人GRAV 星擎力控型机器人夹爪高扩展性/适配性三自由度工业级力控强易用性专为动作相对简单但又有力控需求的场景而设计即插即用应用仿生壁虎材料极致的力控性能强大通用性,适应尽可能多的处理对象和复杂任务ROBOT ARM关节运动范围自由度负载臂展自重防护等级安装位置运行温度湿度工具输出法兰重复定位精度(ISO9283)噪声标准末端线速度最大可控力范围74 kg916 mm 20 kg IP65 任意0 到 45 °C20 % 至 80 %, 非凝结ISO 9409-1-50-4-M6±0.05 mm <70 dB 1.0 m/s200 N -160° 到 +160°-130° 到 +130°-170° 到 +170°-107° 到 +154°-170° 到 +170°-80° 到 +260°-170° 到 +170°74 kg*959 mm 21 kg IP65任意0 到 45 °C20 % 至 80 %, 非凝结ISO 9409-1-50-4-M6±0.05mm <70 dB 1.0 m/s 150 N -160° 到 +160°-130° 到 +130°-170° 到 +170°-107° 到 +154°-170° 到 +170°-80° 到 +260°-170° 到 +170°710 kg 941 mm38 kg IP65任意0 到 45 °C20 % 至 80 % ,非凝结ISO 9409-1-50-4-M6±0.05 mm <70 dB 1.0 m/s350 N -160° 到 +160°-153° 到 +153°-160° 到 +160°-155° 到 +155°-170° 到 +170°-80° 到 +260°-170° 到 +170°Rizon 4Rizon 4sA1 A2A3A4A5A6 Rizon 10* 包含0.5kg力/力矩传感器重量机器人Moonlight 玄晖产品参数自由度自重最大工作高度最大工作直径安装位置防护等级重复定位精度 (ISO9283)机器人底座尺寸工具法兰330 kg 400 mm 800 mm任意IP65±0.03 mm Ø206 mm ISO 9409-1-50-4-M61.5 m/s 10.4 m/s^21.5 m/s 7.5 m/s^21.5 m/s2.8 m/s^2F_xy: 89 N, F_z: 119 N F_xy: 81 N, F_z: 99 N F_xy: 47 N, F_z: 50 N低负载 (5 kg)中负载 (7 kg)高负载 (12 kg)低负载 (5 kg)中负载 (7 kg)高负载 (12 kg)最大TCP力最大速度/加速度夹爪单指行程夹持速度手指位置重复精度力控精度重量防护等级运行温度通讯 两指力控夹持50 mm1N 到 100 N1 到 200 mm/s 0.1 mm 1 N0.9 kg IP67-20 到 +45 ℃整臂集成 (Modbus RTU)平行夹持模式: 两指力控夹持52 mm1N 到 30/80 N 1 到 200 mm/s0.1 mm 1NV 型夹持模式: 211 mm x 210 mm x 84 mm 1 kg IP67-20 到 +45 ℃整臂集成 (Modbus RTU)GravGrav Enhanced最佳夹持力范围周边产品产品参数操控手柄示教器视觉模块管线包导轨AMR 末端工具移动工作台控制箱重量电源电压尺寸功耗输入/输出电源空气湿度防护等级运行温度11 kg 100-240 VAC 50-60 Hz, 42-72 VDC(选配)423 mm x 230 mm x 230 mm 500 W数字量输入:16所有 18 项安全功能通过 EN ISO 13849-1 Cat. 3, PL d 认证24 V, 2 A(控制箱) 24 V, 1 A(工具)主站: Modbus TCP, Ethernet TCP/IP 20 % 至 80 %, 非凝结IP200 到 45°C操作手柄和控制箱之间:7 米Hesper安全系统先进的层级式智能由先进AI及机器人算法驱动、专用处理器搭建的层级式智能系统提供完善的感知、力觉引导的操控能力、灵活性极强的任务规划以及实时的自适应能力。
施耐德自动化产品介绍

ሏႜ ᆫࣅ
ፌׂิࢅీׂࣅٷၳ୲ ॔੦߾ሏႜጒLjۨᆫ ံपਦ֧փీࠕेᅜํแԍኤ߾ڟڥᆶၳڦ੦
具有规模可延展性、灵活性、集成性、协同性四大特性 规模可延展性 协同性
适应系统改造和升级需求
灵活性
您的系统对于我们来说 都是独一无二的 支持各种客户需要的系统 构架,可以实现从单站点 控制,多站点控制,分布 式控制,集中式控制,离 散控制,过程控制,安全 控制到批量控制的多种控 制方式。
3
Modicon Quantum-性能卓越的高端 自动化平台
概述
Unity Pro
a Socollaborative software
Modicon Quantum 是 PLC 的发明者 Modicon 推出的高端自动化平 台,一经推出,就以其无与伦比的可靠性和稳定性,在全球范围内, 特别是中国市场上取得了巨大的成功。2005 年初施耐德电气推出全 新的 Unity 自动化平台,作为该平台的重要组成部分之一,Modicon Quantum 获得了全面的升级。 作为工厂自动化和过程自动化领域最理想的高端自动化平台, Modicon Quantum 广泛应用于以下领域:
海事组织的认证:
■ 美国 ABS 认证 ■ 法国 BV 认证 ■ 挪威 DNV 认证 ■ 德国 GL 认证 ■ CEI GOST 认证 ■ 英国 LR 认证 ■ CIS 的 RRS 认证
等
4
全面升级的 CPU 的技术特征
随着 Unity 自动化平台的发布, Modicon Quantum 推出 6 款基于 Unity 平台的 CPU。这些 CPU 在指令执行速度,内存容量,通讯性能 和热备性能等方面获得了巨大的突破:
EPS 便携式数字地震仪 用户指南说明书
EPS便携式数字地震仪用户指南在使用本产品之前,请仔细阅读并妥善保管中地装(重庆)地质仪器有限公司2016年11月尊敬的用户:您好!首先感谢您购买本企业产品,相信这一全新的产品会给您的工作带来帮助和便利;为了让您能更好的使用EPS系列仪器,请仔细阅读本用户指南。
本用户指南专门用于指导您了解该系列仪器的功能和使用。
在使用本产品前请您认真阅读产品使用指南,并妥善保存。
因违反本用户指南中的安全注意事项及使用说明事项而导致的事故,本企业不承担任何责任。
请先阅读说明文件·使用仪器之前,请先仔细阅读全部安全注意事项和本用户指南,以确保安全和正确使用。
·本用户指南中的说明基于仪器的出厂设置。
·本用户指南中所用的图像、屏幕截图可能与实际产品的外观不同。
·本用户指南中所介绍的功能及配置可能与用户实际选择的配置和功能有所不同。
·本用户指南中的一些内容,可能与服务提供商或服务商提供的软件有所不同,如有变更,恕不另行通知。
请访问获得用户指南的最新版本。
·可用功能和服务可能因为设备、软件或服务提供商而异。
·安装仪器配套软件请根据具体要求操作,因操作系统而导致的性能问题或不兼容性,本企业概不负责。
·您可以访问下载或致电我厂销售技术部索取最新的相关程序,对仪器的工作软件及操作软件进行升级。
·无线网络通讯功能的使用可能会产生其他费用,有关详细信息,请联系服务提供商。
·本仪器提供的软件、图像及其他内容被许可在中国地质装备集团有限公司及其各所有人之间有限使用。
将这些资料引用并使用于商业或其他用途,是违反版权的行为。
我们对用户的此类版权侵权行为概不负责。
如果您在阅读本用户指南中遇到不清楚的地方,中地装(重庆)地质仪器有限公司销售技术部,将会为您详细解释。
如果您有任何意见或建议,欢迎致电中地装(重庆)地质仪器有限公务热线)。
感谢您对中地装(重庆)地质仪器有限公司的支持与厚爱,祝您使用愉快。
欧姆龙振动抑制技术
欧姆龙振动抑制技术
欧姆龙振动抑制技术(Omron Vibration Suppression Technology)是欧姆龙公司独有的一项技术,用于在机械设备
中抑制振动,提高设备的稳定性和精度。
这项技术通过使用专门设计的控制算法和硬件设备来实现。
它可以根据设备的振动情况进行实时监测和调整,从而减少振动的影响。
该技术适用于各种机械设备,例如工业机械、机器人、医疗设备等。
欧姆龙振动抑制技术的主要优点包括:
1. 提高设备的稳定性:通过抑制振动,减少了设备因振动而引起的不稳定性和摆动,提高了设备的工作效率和可靠性。
2. 提高设备的精度:振动对于某些精密设备的工作精度有很大影响。
欧姆龙振动抑制技术可以减少振动对设备精度的干扰,提高设备的工作精度。
3. 增加设备寿命:振动会对设备的部件产生额外的压力和损耗,降低设备的寿命。
通过减少振动,欧姆龙振动抑制技术可以延长设备的使用寿命。
4. 高度可定制化:欧姆龙振动抑制技术可以根据不同设备的需要进行定制,满足各种不同场景下的应用需求。
总之,欧姆龙振动抑制技术是一项有助于提高机械设备稳定性和精度的先进技术,为各个行业提供了可靠的解决方案。
光刻机运动平台系统的模型辨识
光刻机运动平台系统的模型辨识范文超;陈兴林;王斌;魏凯【摘要】In view of the influence of the mechanical resonance on ultra-precision lithography system, the macro-micro motion stage containing mechanical resonance is recognized for suppressing the mechanical resonance. Firstly, the single degree of freedom ( SDOF ) macro-micro coupling model and resonance model are built, then, based on hierarchical recognition principle, the mechanical model is recognized segmentally, finally, the notch filter is designed based on resonance model for suppressing the mechanical resonance. The test results show that this method effectively suppresses the mechanical resonance of the macro-micro stage, and greatly improves the dynamic response of the system.%针对机械谐振对超精密光刻系统的影响,对包含有机械谐振的光刻机宏微运动平台进行辨识来抑制机械谐振。
首先建立单自由度宏微耦合运动模型和谐振模型,然后基于递阶辨识原理对机械谐振模型进行分段辨识,最后基于谐振模型设计陷波器,抑制机械谐振。
基于柔性铰链微动平台的自抗扰控制方法
基于柔性铰链微动平台的自抗扰控制方法
彭皓;杨志军;蔡炳彧;白有盾
【期刊名称】《机床与液压》
【年(卷),期】2024(52)8
【摘要】微动平台一般以柔性铰链为导向机构,由于系统固有频率低,会严重限制传统PID算法的控制带宽,影响定位精度。
因此,设计自抗扰控制算法(ADRC)将系统未建模动态与外部未知扰动共同视作“总扰动”,通过扩张状态观测器(ESO)进行估计和补偿,提高系统的控制带宽。
为了充分利用已知的模型信息,设计基于模型的ADRC算法,将柔性铰链标称模型输入到ESO中,进一步提升系统的控制性能。
最后,通过10μm行程的点位运动实验进行验证。
结果表明:因为控制带宽无法过大而导致PID难以响应,ADRC提高了控制系统带宽,实现了精密定位;模型ADRC进一步提升了响应速度与定位精度。
相比ADRC,模型ADRC整定时间缩短了68.1%,最大跟踪误差降低了53.8%,定位精度提升了60.7%。
【总页数】5页(P24-28)
【作者】彭皓;杨志军;蔡炳彧;白有盾
【作者单位】广东工业大学;佛山市华道超精科技有限公司;汕头职业技术学院机电工程系
【正文语种】中文
【中图分类】TP273
【相关文献】
1.空间微动平台的柔性铰链参数优化设计
2.柔性铰链的微动平台设计
3.新型并联柔性铰链微动精密平台的研究
4.基于柔性铰链的二维微动平台特性研究
5.基于最小二乘法优化的柔性机械臂自抗扰控制方法
因版权原因,仅展示原文概要,查看原文内容请购买。
纳米位移台
纳米位移台
压电纳米位移台
压电纳米位移台是通过压电马达驱动控制的电动位移台,不同于传统的步进马达,直线电机,电磁马达等驱动形式,压电马达是利用逆压电效应的原理,通过压电陶瓷在电场作用下(一般在共振状态下)产生的形变,由摩擦耦合推动滑台动子的运动,从而驱动平台的精密位置移动。
压电纳米位移台断电时保持自锁,从而不消耗能量,不发热,可以很好的保持位置的机械稳定性。
由压电马达驱动的纳米位移台一般把马达安装在位移台的基座上,而动子则是安装位移台滑动台面部分,压电驱动纳米位移台没有传统电磁马达(伺服或步进电机)驱动的位移台所需的丝杆或蜗轮蜗杆组部件,是一个直接驱动,稳定性更高,惯性更小,没有回程间隙和机械部件之间的空回,响应时间没有所延迟。
压电陶瓷的形变量小,可以达到非常高的平台位移精度,可以说压电马达驱动的位移台是名副其实的纳米位移台。
特点:我司的压电纳米位移台产品包括成系列的纳米平移台,纳米角位移台,旋转台,纳米升降台和一体式纳米显微镜位移台。
我司纳米位移台均由压电马达驱动,并带位置反馈,可以实时显示平台的实际位置。
根据需要,用户可以选配不同精度位置反馈和不同平台的组合。
同时,也欢迎用户按需要定制。
睿能伺服控制器说明书(D)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
42
机械设计
第 27卷第 7期
图 8 所示为步进电机产生的干扰信号频率为 2 H z、幅值为 0. 8 Lm 时的位移控制曲线, f 为干扰信号 的频率, A 为幅值。通过 P ID参数和采样频率的参数优 化后, 可以获得良好的响应时间和抑振效果。干扰信号 幅值 A 为 0. 8 Lm 下不同频率的抑振效果如表 3所示。
关键词: 定位; 抑振; 超精密; 微动平台 中图分类号: TD302 文献标识码: A 文章编号: 1001- 2354( 2010) 07- 0040- 03
随着科学技术的不断发展, 各类精密、超精密仪 器仪表如图形发生器、分步重复照相机、光刻机、电子 束和 X 射线及其检测设备等, 被广泛地应用于科学研 究和现实生活中。与此同时, 相配套的各类精密、超精 密微动平台也应运而生 [ 1- 2] , 主要分为两大类, 一类主 要用于隔离外界对设备的干扰信号, 属于被动隔振范 畴; 另一类主要用作驱动器, 使超精密仪器设备实现微 小量的位移, 属于精密定位范畴。目前, 高精度、高分 辨率的精密微动平台在近代尖端科学研究领域内占有 极其重要的地位。
3 给定位移量定位下的抑振研究
系统抑振功能的研究建立在理想的定位功能基础 上。通过高分辨率的位移传感器, 对精密设备本身产生 的位移信号进行拾取, 经过 A /D 转换器采集后传送给 PC机, 与程序设定的精确位移量进行比较, 并利用 P ID 控制算法计算出增量, 再由 D /A 转换器、功率放大器、 压电陶瓷驱动器把增量信号施加到工作平台, 从而大 幅度地减小系统内部扰动对系统产生的影响, 使安装 与微动平台上的精密设备处于相对理想的环境。系统 纯抑振的情况即为设定的定位位移量为 0, 属于一种 特例, 由于篇幅关系不再讨论。
0. 5 0. 19 2. 2
1 0. 21 4. 1
2 0. 24 6. 2
3 0. 32 8. 3
4 0. 40 10. 5
在较大幅值的干扰信号作用下, 系统仍具有较理 想的抑振效果。图 9中的干扰信号频率为 5 H z, 幅值有 较大幅度的增加, 达 5 Lm。分析位移控制曲线得出, 系 统响应时间为 0. 44 s, 抑振效果为 12. 9% 。
rea lm ean ing.
能有效地抑制系统内部产生的位移干扰, 不同频率、小 幅值和大幅值的干扰信号均有理想的抑振效果, 响应 时间均小于 0. 5 s, 抑振效果在 13% 以内。
参考文献
图 8 f = 2 H z, A = 0. 8 Lm 时的位移曲线 表 3 不同频 率干扰信号下的抑振效果
干扰 信号频率 /H z 响应时间 / s 抑振效果 /%
func tion, but a lso can effective ly suppress v ibrating interference oc-
curred in the equ ipm ent itse lf by apply ing the ant-i position pr inc iple
但是以上两类精密微动平台均未对仪器仪表本身 执行机构的动作所产生的扰动加以抑制。文中研究的 重点在于完成高精度定位 [ 3] 的同时, 能有效地抑制高 精度仪器仪表由于本身执行机构的 动作所产生的 振 动, 达到更理想的精密定位控制效果。
图 2给出了平台的主要尺寸。
图 2 微动平台主要尺寸
图 3 和表 1为平台中柔性铰链的主要参数及尺 寸。微动平台采用压电陶瓷驱动器, 用柔性铰链作为 导轨形式, 采用 P ID 闭环控制方法。系统输出位移的 分辨率为 ? 10 nm, 可以实现纳米级的定位和抑振。
表 2 不同定位位移量的响应时间
定位位移量 /Lm 响应时间 / s
1. 22 3. 22 5. 22 8. 22 0. 11 0. 23 0. 35 0. 47
图 5 微动平台的简化模型
驱动电源对 D /A输出的电压成正比的放大, 放大 倍数为一定值, 其线性相当好, 因此, 其传递函数可以 认为是一个常数, 设为 A。
U ltra-prec ision m icro-disp lacem ent work tab le w ith vib ra-
tion suppression function
HUANG Jin-yon g1, DENG Jin- lian1, W E I Yan-d ing2
( 1. D epartm ent ofM echanical Eng ineer ing, Zhe jiang Institute
图 9 f = 5 H z, A = 5. 0 Lm 时的位移曲线
4 结论
实验所研究的精密微动平台可实现精密定位, 精 度在 ? 10 nm 以内, 且具有理想的动态响应特性。同时
[ 1] 薛实福, 李庆祥. 精密仪器设计 [M ] . 北 京: 清华大学 出 版社, 1991.
[ 2] Jae W R yu, D ae-G ab Gweon, K ee S. M oon optima l design of a flexure hinge based XYHwa fer stage[ J]. Prec ision Eng ineer ing, 1997, 21( 1): 18- 28.
Ab stract: A im ing a t the increasing num be r of ultra-precision
instruments, the wo rktab le w ith work env ironm ent is comm on ly pro-
v ided, this can on ly reduce vibra ting in terference from outside, but
摘要: 针对目前日益增多的超精密仪器仪表, 一般 给其提 供良好 工作环 境的工 作平台 只能消 除外 界对其 的振 动干 扰, 对于仪 器仪表自身各种执行机构动作所产生的干扰却无能为力。文中研究的微动平台不仅具有良好 的定位功能, 同 时运用反定位原理, 采用闭环 P ID 控制算法, 可 以有效抑制设备自身产 生的振动 干扰, 从 而更全面 地获得 精密设备 所需 要的良好工作环境, 实现真正意义上的超精密。
it is im possib le to e lim inate the interference caused by the action o f
var ious ac tuators w ith the instrum ents them se lves. T he m icro-d is-
placem ent wo rktab le in th is paper no t only has a good positional
* 收稿日期: 2009- 03- 05; 修订日期: 2009- 12- 25 基金项目: 国家自然科学基金资助项目 ( 50005020) ; 863 青年基金资助项目 ( 863 - 2- 2- 11- 3 ) 作者简介: 黄金永 ( 1978) ) , 男, 浙江诸暨人, 讲师, 硕士研究生, 研究方向: 机电一体化、精密定位。
1 微位移系统的模型建立
图 1所示为二维微动平台示意图 [ 3] 。
图 1 微动平台示意图
铰链厚度 t /mm 1
图 3 柔性铰链机构简图 表 1 柔性铰链主要参数尺寸
铰 链半径 平台厚度 连杆宽度
R /mm 1. 5
b /mm 15
h /mm 10
连杆长度 l /mm 20
系统选用的 WTDS- IA型压电陶瓷驱动器呈电容
and adopting and c lo sed- loop P ID contro l a lgo rithm, much m ore
com prehensively obta in ing the good w ork env ironm ent requ ired by
the prec ision equ ipm ent, m aking them to be u ltra-prec ision in the
2010年 7月
黄金永, 等: 具有抑振功能的超精密 微动平台
41
性, 其模型可简化为如图 4所示 [ 4 ] 。C 为微位移执行器
的等效电容; R 为驱动电源的等效充放电电阻。因此,
V i 到 Vo 的传递函数为:
G1 ( s)
=
Km T s+
1
( 1)
式中: T ) ) ) 时间常数, T = RC;
图 7 定位量为 5. 22 Lm 的定位曲线
另外, 在带前馈环节的控制中, 系统也显示出良好 的动态响 应特性, 不同 的定位位 移量 的响应 时间如 表 2所示。理想的定位精度为抑振控制提供了良好的 平台。但前馈环节使系统产生了较大的超调量, 因此在 不允许出现较大超调量的情况下, 应尽量避免使用前 馈环节。Biblioteka 图 4 压 电驱动器的简化模型
微动平台可简化为如图 5所示的弹簧、质量、阻尼
的二阶系统, 其传递函数为:
G2 ( s)
=
kX2n s2 + 2NXn s + X2n
( 2)
式中: k) ) ) 放大系数, k = K t /(K t + K );
N) ) ) 阻尼比;
Xn) ) ) 系统无阻尼自然角频率, Xn = (K + K t ) /m。
对于电感式位移传感器, 其位移与输出电压的关 系与选择的档位有关, 当档位确定后, 其比例系数也就 确定。因此, 同样可设传感器环节的传递函数为 B。图 6 示出了微位移系统的模型方块图。图中 W ( s) 为控制 系统的传递函数 [ 5] 。