数字式航向角指示器的设计
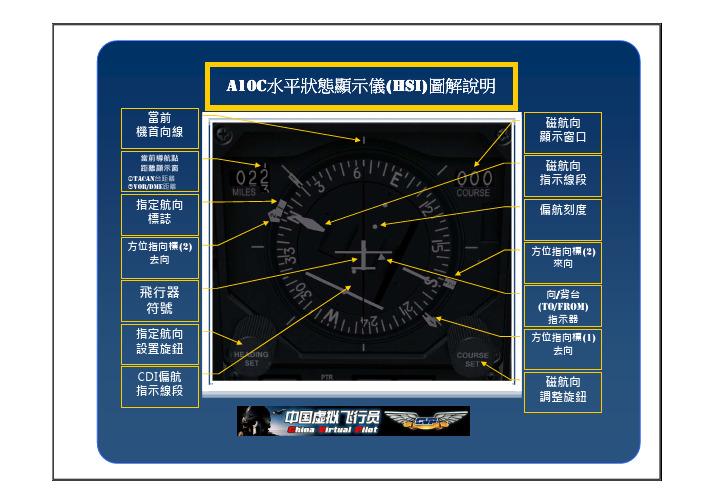
A10C水平状态显示仪(HSI)图解说明
二轉改出 1.外圈方位指向線指向機場 (可以目視機場也在相對方位 上) 2.CDI偏航指示線與飛機飛 行路徑 平行並在飛機左側
进入四邉及四转-BASE 1.进入四邉后機首向
線与CDI偏航線垂直 2.依據 HSI 方位指向線(2)
與機首向線的角度逐漸 減小(靠近跑到中線)抓 提前量进行平滑转向对 正跑道
去向
磁航向 調整旋鈕
起飛前HSI 設定程序及注意事項
1. 冷啟完畢後(慣性導航程式校準完成 後)將準備起飛跑道的磁航向入HIS 右上角航向欄內(起飛跑道磁航向請 查閱機場航圖跑道旁標示)
2.設定進近點(不能使用0號點-0號位置 為地面慣性校準位置也就是停機位,距 離跑道進近點差一大截)請至轉降場頁 面選擇進近點,方法:UFC設置
當前 機首向線
當前導航點 距離顯示窗 TACAN台距離 VOR/DME距離
指定航向 標誌
方位指向標(2) 去向
飛行器 符號
指定航向 設置旋鈕 CDI偏航 指示線段
A10C水平狀態顯示儀(HSI)圖解說明
磁航向 顯示窗口
磁航向 指示線段 偏航刻度
方位指向標(2) 來向
向/背台 (TO/FROM)
指示器 方位指向標(1)
本場五邉HSI應用圖解
FUNC鍵→NAV主頁 →DIVERT子頁→選擇機 場→檢查HUD右下角導航點是否已變成選擇的 機場位置…完成!! 2. 進入跑道後確認HSI 四線均在同一線
上,且方位指向線(2)箭頭指向正前方
三轉 1.通過機場正橫點 2.注意 HSI 距離決定
轉向點轉向四邉 3.開始進入四轉
三邉-DOWNWIND 1.確認機場寬度 2.這時你可以看到方位
阿尔法航海 G MKR056 航向指示仪安装与使用手册说明书
ALPHACOURSE G/MKR056 Analogue heading indicatorInstallation & Operation manualALPHATRON MARINE B.V. Schaardijk 233063 NH ROTTERDAM The NetherlandsTel: +31 (0)10 – 453 4000 Fax: +31 (0)10 – 452 9214P.O. Box 2100033001 AA ROTTERDAM The information in this Manual is subject to changewithout notice and does not represent a commitment on the part of ALPHATRON MARINE B.V.Document : Manual Alphacourse G/MKR056 Issue : 1.1Table of Contents:1Revision history (5)2Introduction (6)3Definitions and abbreviations (7)3.1Definitions (7)3.2Abbreviations used in this manual (8)4Installation (9)4.1Delivered hardware (9)4.1.1Hardware Alphacourse G (9)4.2Dimensions Alphacourse G (10)4.3Mounting Alphacourse G (11)4.4Connecting hardware (11)4.4.1Connecting Alphacourse G (12)4.4.1.1Preparing and terminating the cables (12)4.4.1.2Grounding the Alphacourse G (13)4.4.1.3Connecting power supply Alphacourse G (13)4.4.1.4Connecting Alphacourse G to serial data source (14)5OPERATING Alphacourse G (15)5.1Operation ESSENTIALS (15)5.2SYNC button (15)5.3Dimmer knob (15)5.4OPERATING MODES (15)5.4.1Normal operating mode (16)5.4.2Alarm mode (16)6COMPASS SAFE DISTANCE (18)7TECHNICAL SPECIFICATIONS (18)7.1ELECTRICAL SPECIFICATIONS (18)7.2ENVIRONMENTAL SPECIFICATIONS (18)7.3MECHANICAL SPECIFICATIONS (18)8TECHNICAL SUPPORT (19)9Appendix 1: Connection diagram (20)10Notes: (21)Figures and tables:Figure 1: Hardware of the Alphacourse G (9)Figure 2: Mechanical dimensions (10)Figure 3: Possible mounting positions (11)Figure 4: Location of connector on back side of the Alphacourse G (12)Figure 5: Correct grounding of the instrument (13)Figure 6: Dipswitch setting Alphacourse G (14)Figure 7: Operation knops of Alphacourse G (15)Figure 8: Operating elements Alphacourse G (16)Table 1: Error codes Alphacourse G (17)CAUTION!DO NOT modify this equipment in any way without obtaining a written permission from ALPHATRON MARINE otherwise you will void the warranty.CAUTION!This product is only to be installed by a certified installation company either approved by ALPHATRON MARINE B.V or by one of its distributors, otherwise you will void the warranty. This product must be installed according to the prescribed installation methods in this manual, otherwise you will void the warranty.CAUTION!The ALPHACOURSE G contain no operator serviceable parts. Service and repair shall only be done by trained and certified personal.Nothing from this manual may be copied, multiplied or published by means of press, photocopy, microfilm or any other way, without written consent beforehand by Alphatron Marine B.V.Even though this manual has been composed with the utmost care, no rights can be derived on the content of this manual.1Revision historyREVISION DATA COMMENTV1.0 22-09-2008 Document draft.V1.1 11-01-2010 Changed/updated appendix connection diagram2IntroductionThe Alphacourse G/MKR056 is a analog heading indicator, designed to indicate a ships (true)heading in respect to the geographical(true) North of the earth. The Alphacourse has a standardized IEC-61162-1(NMEA0183) data-input for receiving true-heading serial data. From now on the Alphacourse G/MKR056 will be called “Alphacourse G”.3Definitions and abbreviations3.1DefinitionsGyro compassthis is a compass that finds true north by using an (electrically powered) fast-spinning wheel and friction forces in order to exploit the rotation of the Earth.LED’sLight emitting diodes, these are used for signaling statuses of hardware and signals to the user.IEC61162-1/NMEA dataProtocol/standard for transmitting and receiving of asynchronous serial data sentences. grounding point/studPoint on the chassis of the instrument which should be connected to the ships mass. (galvanic)isolatedElectrically separation of two circuits. There is no current flowing directly from one circuit to another. Electrical energy and/or information can still be exchanged between the sections by other means, such as induction or optical means(think of transformers or optocouplers).baudrateThis is the transmission speed of serial interfaces in bits per second.compass save distanceThis distance determines the distances above which equipment will not cause an unacceptable deviation of the ship's standard and steering compasses.true-headingHeading relative to true north of the earth3.2Abbreviations used in this manualA AmpereDC Direct currentGPS Global positioning systemGyro GyrocompassI/O Inputs and OutputsLED Light emitting diodemA mill amperesmm millimeterNMEA National Marine Electronics Association PCB Printed circuit boardVDC Volts direct currentW Watt4InstallationIn this chapter the hardware and the installation of the Alphacourse G are discussed. Please be advised to strictly meet the prescribed installation methods. If the Alphacourse G is not installed according to the prescribed installation methods it will possible not meet to the specifications.The Location class/category of the Alphacourse G/MKR056 is:Protected from the weather (formerly class B)4.1Delivered hardwareIn this chapter the delivered hardware will be discussed.4.1.1Hardware Alphacourse GThe hardware of the Alphacourse G consists of the following parts:Analogue heading indicatorCable 1x5x0.75mm2, Length 3mFigure 1: Hardware of the Alphacourse GInstallation & Operation manual Alphacourse G Issue 1.14.2Dimensions Alphacourse G The physical dimensions of the Alphacourse G are:Figure 2: Mechanical dimensions There is also a dimensional drawing in the appendix of this document.Alphacourse G/MKR05610 104.3Mounting Alphacourse GThe Alphacourse G can be installed a number of different ways; horizontally, vertically as well as at an angle. The possible positions are shown in figure 3. Do consider the placing of the Alphacourse G carefully. Make sure that there is enough room left for the connecting of the cables.Please also consider the right position/angle for mounting the Alphacourse G in which maximum visibility for the user can be achieved.Figure 3: Possible mounting positions4.4Connecting hardwareIn this chapter the connecting of the Alphacourse G is explained.NOTE: Use only recommended cable as described in the cable diagram in the appendix.NOTE: Install the Alphacourse G according to the prescribed installation methods in this manual.4.4.1Connecting Alphacourse GThe Alphacourse G has one internal connector located on the back side of the instrument. This connector is for connecting both power supply and serial data input to the instrument. It has 6 terminals with the following functions:Serial input:1.GND2.RX-(SDB)(RS485)3.RX+(SDA)(RS485)Power supply input:4.0V5.GND(DO NOT USE)6.24VDC inputNOTE: terminal 5 should not be used for powering the instrument only terminals 4 and 6 should be used for this.Figure 4: Location of connector on back side of the Alphacourse G4.4.1.1Preparing and terminating the cablesFor the instrument to operate correctly it is essential that all cables are installed and terminated correctly. The Alphacourse G comes with a pre-installed cable with a length of 3 meters. This cable is already connected and mounted on to the Alphacourse G’s back side. It is highly recommended to use this cable and to connect it in a external connection box to the installed cable(s) on the ship. See also figure 4 and the complete connection diagram that can be found in the appendix of this manual.4.4.1.2Grounding the Alphacourse GThe instrument must be grounded to the ships structure/mass to operate correctly. There is a grounding point on the back of the instrument on the right of the internal connector.Via the green wire in the pre-installed cable this grounding point should be connected to the ships structure/mass. See Figure 5: Correct grounding of the instrumentFigure 5: Correct grounding of the instrument4.4.1.3Connecting power supply Alphacourse GThe Alphacourse G must be connected to a 24VDC power supply that can supply at least 0.75 ampere. Connector terminals 4 and 6 should be used to connect the power supply. The polarity of the power connectors is shown on both the printed circuit board and the connection label on the back of the instrument. The maximum core thickness that can be connected is 2.5mm². The power supply input is galvanic isolated.The complete connection diagram of the Alphacourse G is included in the Appendix of this manual.4.4.1.4Connecting Alphacourse G to serial data sourceVia the terminals 2 and 3 serial data can be connected to the Alphacourse G. This data should comply with the IEC61162-1 norm. The by the Alphacourse G accepted sentence is:Via dipswitches inside the Alphacourse G the type of data source should be selected. To change the dipswitch settings the (back-side)housing of the Alphacourse G should be opened. Via the dipswitches there are three selectable data source types, these are: -HE -> Gyrocompass-HC -> Magnetic compass-GP -> GPS compassVia the dipswitches one of these data source types can be selected at a time. See figure below for the location of the dipswitches and the configuration settings.Figure 6: Dipswitch setting Alphacourse GBy default the Alphacourse G is set to:-4800 bps(Baudrate)-Accepted sentence: $HEHDT5OPERATING Alphacourse GIn this section the operating of the Alphacourse G is explained.5.1Operation ESSENTIALSFor operation, the Alphacourse G has one push-button(SYNC) and one rotatingknob(Dimmer).Figure 7: Operation knops of Alphacourse G5.2SYNC buttonWith the SYNC button the user can calibrate the analogue indicator of the Alpgacourse G. Once pushed on this button both analogue scales(inner and outer) will turn to zero and calibrate them selfs. During calibration the green RUN let will blink. After calibration the indicator will turn to the heading received on the serial input port.5.3Dimmer knobThe brightness of the backlight of the instrument can be set by rotating the dimmer knob. Turning clock-wise will increase brightness and turning anti-clock wise will decrease the brightness.5.4OPERATING MODESThe Alphacourse G has two working statuses:1.Normal mode2.Alarm mode5.4.1Normal operating modeDuring normal mode the Alphacourse G will indicate the ships heading with one decimal accuracy. The “outer” analogue scale will indicate the heading without decimals, 0 till 360degrees per revolution). The “inner” scale will indicate only the heading part of one decimal in front and one decimal behind the comma.If the instrument is powered the green RUN LED is lit. When the instrument is calibrating(directly after start-up or via SYNC button) the green LED will blink. See figure above.5.4.2Alarm modeWhen the instrument has detected an error the red fail LED is lit or will blink.NOTE: most of the errors are related to wrong serial data received on the serial input. Check the wire polarity and the dipswitch setting in the Alphacourse G. The type of error indicated by the instrument can be found in Table 1: Error codes Alphacourse G.Table 1: Error codes Alphacourse GIf the optical sensor is broken the analogue pointer can be calibrated manually. This has to be done in the following way.It is possible to adjust the null point manually when the automatic calibration fails. The procedure is as follows:1.Push SYNC button for more than 2 seconds.2.Push SYNC button(The analogue scales will turn around rapidly)3.Push SYNC button when the outer scale value is within 0 till 10 degrees(roughadjustment) The compass will start to turn slowly now.4.Pus SYNC button when the compass inner scale aligns with the 0 degrees lubbermark.(fine adjustment)After 3 seconds the fail indicator LED will be turned off and the Alphacourse G should indicate the same heading as the ships master compass. CHECK if this is soIf there is still a miss-alignment than repeat the above procedure till there is no difference between the master compass and the Alphacourse G.6COMPASS SAFE DISTANCEThe magnetic compass save distance of the Alphacourse G is given below:STANDARD MAGNETIC COMPASS: 0.8mSTEERING MAGNETIC COMPASS: 0.8m7TECHNICAL SPECIFICATIONSIn this chapter the technical specifications of the Alphacourse G are given. The technical specifications are divided into electrical, environmental and mechanical specifications. 7.1ELECTRICAL SPECIFICATIONSElectrical:Parameter Value CommentsOperating voltage 18-36 Volts DC voltagePower consumption 0.6A maxReverse battery protection No Automatic fuse will tripOutput(s) NoSafe compass distance 0.8 meter7.2ENVIRONMENTAL SPECIFICATIONSEnvironmental:Parameter Value CommentsOperation temperature -10°C to +50°CStorage temperature -10°C to +50°C7.3MECHANICAL SPECIFICATIONSMechanical:Parameter Value Comments Size 200x210x141mmWeight 2.7 Kg8TECHNICAL SUPPORTPlease contact Alphatron Marine B.V. for technical support regarding the ALPHACOURSE G:Alphatron Marine BVSchaardijk 233063NH, RotterdamP.O. Box 21003The NetherlandsTel: 0031(0)10 4534000Fax: 0031(0)10 4529214***************************A l p h a c o u r s e G /M K R 056I n s t a l l a t i o n & O p e r a t i o n m a n u a l A l p h a c o u r s e G I s s u e 1.120209 A p p e n d i x 1: C o n n e c t i o n d i a g r a m10Notes:- this page is intentionally left blank -。
使用HMC5883L-3轴数字罗盘传感器计算航向角
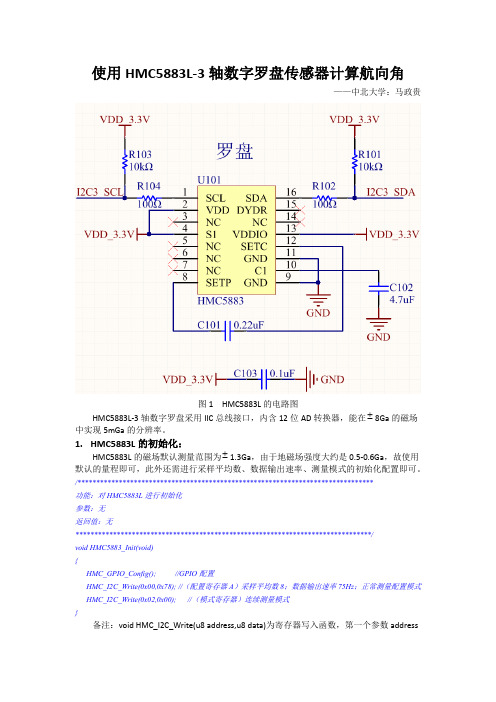
使用HMC5883L -3轴数字罗盘传感器计算航向角——中北大学:马政贵图1 HMC5883L 的电路图HMC5883L -3轴数字罗盘采用IIC 总线接口,内含12位AD 转换器,能在8Ga 的磁场中实现5mGa 的分辨率。
1. HMC5883L 的初始化:HMC5883L 的磁场默认测量范围为 1.3Ga ,由于地磁场强度大约是0.5-0.6Ga ,故使用默认的量程即可,此外还需进行采样平均数、数据输出速率、测量模式的初始化配置即可。
/******************************************************************************* 功能:对HMC5883L 进行初始化参数:无返回值:无*******************************************************************************/ void HMC5883_Init(void){HMC_GPIO_Config(); //GPIO 配置HMC_I2C_Write(0x00,0x78); //(配置寄存器A )采样平均数8;数据输出速率75Hz ;正常测量配置模式 HMC_I2C_Write(0x02,0x00); //(模式寄存器)连续测量模式}备注:void HMC_I2C_Write(u8 address,u8 data)为寄存器写入函数,第一个参数address ±±为要写入的寄存器地址,第二个参数data 为要写入寄存器的值。
2. HMC5883L 自测:HMC5883L -3轴数字罗盘内含自测模式。
HMC_I2C_Write(0x00,0x79); //(配置寄存器A )采样平均数8;数据输出速率75Hz ;正偏压自测模式 HMC_I2C_Write(0x02,0x01); //(模式寄存器)单一测量模式通过将配置寄存器A 的最低位(MS1和MS0)从00更改为01,然后再配置为单一测量模式,即可进入自测模式。
A320主飞行显示器PFD概述
罗盘显示的方式是非常传统化的 。固定的黄色线代表飞机的中心线 ,灰色的标尺相对其移动以显示航 向。在本例中,飞机航向是090度 。
航向 090
MENU
绿色的小菱形代表飞机的航迹, 这个菱形被称为航迹菱形(TRACK DIAMOND)。
在本例中航迹显示为094度,这 意味着飞机有3度向右的偏流。
MENU
飞机的航向和航迹相同,所以 FPV和航迹菱形与航向标志对齐。 这些指示表示飞机没有偏流。
MENU
俯仰姿态
飞机正在平飞俯仰角为9度。FPV 在水平线上所以现在飞行航迹角为0 ,也就是飞机在平飞。
现在让我们输入一个下降看看 FPV上会发生什么
MENU
俯仰姿态
飞行航迹角 FPV将移到下方指示飞机飞行线 路在空中下降的角度。这被称为飞 行航迹角。
参考气压选择和指示器
参考气压指示
MENU
旋转选择器的外圈可以将 参考气压显示的单位改为百 帕。
参考气压选择和指示器
1020
1020
参考气压指示
MENU
F7L 07000
3S0T.D08
QNH
飞机着陆后,地面参考带 在标尺的中央。垂直速度指 示为0。
下面我们将讨论罗盘标 尺。
垂直速度0
地面参考带
MENU
MENU
姿态指示器上也有高于或低于水 平的俯仰角刻度标尺。
MENU
坡度显示在指示器的顶部,每个 刻度代表10度坡度。
MENU
横滚标志
三角型的横滚指示标志通过与固 定刻度的相对移动指示出坡度。
为了演示俯仰和坡度的指示让我 们来看看爬升转弯时的指示。
MENU
20 度左倾
在本例中飞机向左倾斜,坡度为 20度,并且上仰10度。
声纳浮标处理系统测试设备中的航向角指示器研制

1 设 计 方 案
口, T 9 5 A 8S 1可 以按 照 常 规 方 法 进 行 编程 , 可 以在 线 编 程 。 置看 门 也 内
信息处理系统测试设备中如采用综合计划导航仪 ,一是 价格昂贵: 二 是需 从 国外 订 货 , 周期 长 。 因此 决 定设 计 制作 正余 弦变 压 器 及 匹配 电 路来 指 示 航 向角 信 号 , 到 相 同 的 指 示 目 的 , 且 同 时 还 可 将 模 拟 指 达 并 示 转 为 数 字 指示 , 高 指 示 精 度 。 电路 原 理 如 图 1 示 。 提 所
某 型 飞 机声 纳 浮 标 信 息 处理 系统 技 术 较 为 先 进 . 缺 乏 配 套 的 通 但 AT 9 5 单 片 机 由美 国 A ME 8S 1 T L公 司生 产 .是一 个 低 电压 高 性 能 电检 测设 备 , 维 护 工 作 带来 不 便 。 解 决 此 问题 , 制 了声 纳 浮 标 信 C S8位 单 片 机 , 内 含 4 给 为 研 MO 片 k字 节 Fah闪 速存 储 器 和 18字 节 的 随 l s 2 息 处 理 系统 测 试 设 备 。 机 存 取 数 据 存 储 器 ( AM) 内置 看 门 狗 ( D , 容 标 准 MC 一 1指 R , W T)兼 S5 测试 设 备 主要 有供 电 控 制 电路 、 收机 控 制 电 路 、 拟 器 控 制 电 令 系 统 , 有 4 接 模 共 O个 引脚 ,2个 外 部 双 向 输 人/ 出 ( o) 口 , 时 内 3 输 u 端 同 路 、 向角 指 示 器 等组 成 。这 里 重 点 介 绍航 向角 指 示 器 的研 制 。 航 含 2个 外 中 断 口 , 2个 1 6位 可 编 程 定 时 计 数 器 , 垒 双 工 串行 通 信 2个
从“两个罗盘”到“航向位置指示器”
从“两个罗盘”到“航向位置指示器”作者:曲霞钱金山来源:《硅谷》2013年第22期摘要单机穿云飞行是飞行员必须掌握的技能之一,其最后一个阶段是使飞机沿跑道延长线穿云下降。
在这一过程中,由于受侧风的影响以及飞行员保持要素不准等原因,飞机可能会偏离跑道延长线,进而影响安全着陆。
所以,飞行员必须要及时地发现并修正偏差,使飞机回到跑道延长线上。
复杂气象条件下,无法用目视的方法判断飞机是否在跑道延长线上,偏差的发现和修正一般是借助于领航仪表来实现的。
在初教机上,可以借助于两个罗盘——磁罗盘和无线电罗盘;而在安装有航向位置指示器的飞机上,无线电罗盘和磁罗盘指示的角度都可以在航向位置指示器上指示,所以,偏差的发现和修正只需借助这一块仪表进行。
完成初教机飞行训练的学员,已经适应了两个罗盘,本文对如何尽快完成从“两个罗盘”到“航向位置指示器”的转化做详细分析。
关键词“两个罗盘”;“航向位置指示器”;穿云下降;偏差和修正中图分类号:V323 文献标识码:A 文章编号:1671-7597(2013)22-0102-021 发现偏差如果飞机在跑道延长线上(所说的不偏),飞机的磁航向(CX)和电台相对方位角(DXF)之和应等于着陆磁航向(CX着),即CX+DXF=CX着。
否则,飞机将偏离跑道延长线。
飞机沿跑道延长线上穿云下降,实际上就是沿着与跑道延长线相重合的无线电方位线作向电台飞行。
向电台飞行的方法有两种:一种是保持DXF=0º;另一种是修正风的影响,保持DXF=360º+PL。
1.1 理论分析1.1.1 保持DXF=0º飞行在公式CX+DXF=CX着中,如果DXF=0º,说明当CX=CX着时,飞机在跑道延长线上,并且机头对正导航台。
如果飞机位置偏左,CX大于CX着;如果飞机位置偏右,CX小于CX 着。
飞机位置偏离跑道延长线的程度用飞机位置和导航台的连线与跑道延长线之间的夹角,称之为偏离角(LJ)来表示,其大小等于CX与CX着的差值。
基于液晶航向指示器接口电路的优化设计
传统机载仪表主要是机械仪表,在实际操作过程中存在许多问题,传输效率低、分辨率差导致指示航向常常出现失误。
近年来,随着我国科学技术的不断进步,电子仪表大量使用液晶屏显示,也应用在航向指示器中,解决了传统机械仪表的问题,提高了仪表的准确度。
本文所研究的航向指示器接口电路能够接收通过液晶屏显示的各种信息,希望对实际中基于液晶航向指示器接口电路的优化设计有所帮助。
1 硬件设计硬件设计的主要目的是提高其性能,所以要选择最先进的控制系统和最优秀的逻辑数据编辑器。
以自整角机信号为例,如Cygnal推出了混合信号系统单片机(C8051F020),控制系统以内部含有CIP-51的CPU内核的51系列单片机C8051F020为主,相比较51早期系列单片机,其内部存储增大且可靠性增强。
指示器接口电路设计用C8051F020来控制处理数据,还可以和驱动液晶屏,使用串口法进行数据传输,用CPLD来输入输出逻辑数据。
在数据处理方面,以精度要求为标准,实行信号转好,转换器采用14SZZ系列(中国船舶重工集团716研制所提供),分辨率调整为14位就能满足需求,当两路同类信号输入时,可选择双通道功能的转换器,避免电路面积过大。
接口电路通过解算输入自整角机的信号数字,得到数字输出,最后将数字通过D/A转换器从接口电路输出。
1.1 转换器CPLD程序以VHDL语言实现,以单片机输入数据的地址定义为依据,将地址值设为敏感信号,由此产生单通道A/D 模块的片选信号(高低字节),再将转换器芯片A/D转换结果录入缓存进行读取;针对无高低字节选择信号的双通道模块,可产生禁止/使能信号,将转换结果录入缓存,输入信号进行缓存后,CPLD程序可根据地址值将输入信号写单片机,经解算后得出数字输出信号,再根据地址敏感信号产生D/A 转换芯片的控制信号,根据控制信号将数字输出送入转换器。
转换器直流电源波动范围正常允许值为上下10%,严谨越限加电,电路并联方式为:PCB板块正5V、正15V、负15V 以及GND之间分别并联6.8uF和0.1uF的滤波电容。
一种数字式航向角指示仪[发明专利]
![一种数字式航向角指示仪[发明专利]](https://img.taocdn.com/s3/m/e62aec09aeaad1f347933fe5.png)
专利名称:一种数字式航向角指示仪专利类型:发明专利
发明人:王滨,韩雪
申请号:CN201310615860.1
申请日:20131127
公开号:CN104677327A
公开日:
20150603
专利内容由知识产权出版社提供
摘要:一种数字式航向角指示仪,其组成包括:FPGA系统板、接口板、传感器,其中传感器包括地磁传感器以及LCD1602显示模块。
由地磁传感器来实现航向角的测量,用FPGA处理其测量的信息,用LCD来实现航向角的数字式显示的数字式航向角指示仪。
其中FPGA系统板,负责实现整个系统的数据处理、计算、控制。
本设计中采用FPGA ED2开发板作为主控制板来实现此功能。
接口板,负责各传感器与FPGA ED2开发板的硬件接口,以及系统各模块的供电。
传感器,包括地磁传感器以及LCD1602显示模块。
申请人:哈尔滨功成科技创业投资有限公司
地址:150001 黑龙江省哈尔滨市南岗区南通大街258号船舶大厦西区1614室
国籍:CN
更多信息请下载全文后查看。
测绘技术中的航摄航向角设置方法

测绘技术中的航摄航向角设置方法测绘技术是一项非常重要的科学,通过测绘技术,我们可以准确地获取地理信息,并制作出详尽的地图和空间数据。
其中,航摄航向角是测绘过程中一个非常重要的参数,它能够影响测绘结果的准确性和精度。
本文将探讨测绘技术中航摄航向角设置的方法。
首先,我们需要了解什么是航向角。
航向角是飞机或航天器相对于地球表面上某一方向的偏离角度,也可以说是航摄摄影机轴线与正北方向的夹角。
正确设置航向角可以确保测绘过程中所获取到的影像与地面特征的方向对应准确,从而提高地图的制作精度。
那么,如何设置航向角呢?在测绘技术中,有几种常见的方法。
第一种方法是地面控制点法。
这种方法需要在地面上选取一些已知坐标的控制点,以及与其相关的照片。
通过对控制点进行几何解算,可以确定出照片的摄影中心,并计算出航摄航向角。
这种方法需要大量的实地测量工作,但可以提供较为准确的结果。
第二种方法是遥感影像解算法。
这种方法利用遥感影像的特点,通过对影像进行解算,可以获取航摄航向角。
具体来说,可以通过解算影像中的直线或矩形目标物的方向,或者通过解算影像与已知地理数据的对应关系来得到航向角。
这种方法适用于对大面积区域进行快速测绘,但需要准备一些遥感影像和已知地理数据。
第三种方法是惯性导航法。
惯性导航系统是一种可以测量飞行器加速度和角速度的设备,通过对飞行器的运动进行测量和计算,可以得到航摄航向角。
惯性导航法准确度高,但需要较昂贵的设备,并且需要对其进行定期校准。
除了这些常见的方法,还有一些其他方法可以用来设置航向角。
例如,可以利用全球定位系统(GPS)进行测量,或者使用惯性测量单元(IMU)进行测量。
这些方法都有其优缺点,选择合适的方法需要根据具体的测绘要求和条件来决定。
在实际应用中,航向角的设置还需要考虑一些其他因素。
例如,地球上的磁场会对航向角的测量结果产生影响,需要进行磁校正。
此外,飞行器的姿态稳定性也会对航向角的测量精度产生影响,需要进行相应的姿态矫正。
舵角指示器工作原理
舵角指示器工作原理
舵角指示器(Steering Angle Indicator)是飞行器上的一种指示设备,用于显示飞机的舵角。
它通过测量飞机的舵角传感器信号,并将其转换为可视化形式来显示飞机的舵角。
舵角指示器的工作原理如下:
1. 传感器测量:舵角指示器通常通过连接到飞机的舵角传感器来获取数据。
舵角传感器通常是安装在飞机的操纵系统中,可以测量飞机的操纵杆或脚蹬的位置。
2. 数据转换:舵角传感器通常输出电信号,舵角指示器将这些电信号转换为可视化的舵角指示。
转换过程通常涉及一些电子元件,例如模数转换器和放大器。
转换后的数据可以表示为角度或以其他形式呈现。
3. 显示:转换后的舵角数据被传送到舵角指示器的显示屏上。
显示屏可以是液晶显示屏、指针式显示器等。
舵角指示器通常以某种标尺或刻度来显示舵角数值,如度数或百分比。
4. 校准:舵角指示器通常需要进行校准,以确保准确地显示飞机的舵角。
校准可以通过设备自身的功能进行,也可以通过与飞机操纵系统连接进行。
需要注意的是,每个飞机的舵角指示器工作原理可能会有所不同,取决于其设计和制造商。
以上是一个一般的舵角指示器的工作原理的描述,实际情况可能会有所不同。
目标指示器

目标指示器
目标指示器,也被称为目标标识或目标指针,是一种用于指示或显示目标位置的装置。
它可以用于各种场合,例如军事、航海、航空等领域。
目标指示器通常使用指针、线条或者其他方式来指示目标位置,并且可以根据需要进行调节或设置。
在军事上,目标指示器被广泛应用于指挥和控制系统中。
它可以用来指示敌方目标的位置,以便进行击败或避开。
目标指示器通常配备有雷达或其他探测设备,可以实时获取目标的位置信息,并将其显示或指示给指挥官或操作员。
在现代战争中,目标指示器起着重要的作用,可以提高军事行动的效果和精确度。
在航海和航空领域,目标指示器被用于指示目标的位置和航向。
例如,在船舶上,导航仪通常配备有目标指示器,可以显示目标的方位角和距离,船员可以根据该信息进行航向调整。
在飞机上,目标指示器可以用来指示其他飞机或目标的位置,以避免碰撞或进行战术规避。
目标指示器的设计和功能各有不同,不同的领域和需求会有不同的规格和要求。
一般来说,目标指示器需要具备准确度高、反应迅速、易于操作和可靠性强的特点。
在使用目标指示器时,需要注意它的使用方法和限制。
例如,在操作目标指示器时需要根据可视范围和角度来进行调整,以保证准确性和可靠性。
此外,在环境条件不佳的情况下,如天气恶劣或光照不足的情况下,目标指示器的有效性可能会受到
影响。
综上所述,目标指示器是一种用于指示目标位置的装置,可以在军事、航海、航空等领域中应用。
它具备准确度高、反应迅速、易于操作和可靠性强的特点,可以提高工作效率和准确性。
在使用目标指示器时,需要注意其使用方法和限制,并结合实际需求进行调整和设置。
测绘技术中的航测舱位角设计方法
测绘技术中的航测舱位角设计方法航测舱位角是测绘技术中的一个重要概念,它指的是航测相机在飞行过程中的角度设定。
正确的舱位角设计方法对于航测数据的准确性和精度具有至关重要的影响。
在本文中,我将探讨航测舱位角的设计方法,并介绍一些常用的技术手段。
首先,为了掌握舱位角的设计方法,我们需要了解航测舱位角的定义和作用。
在航测中,舱位角是指航测相机与地面的连线与飞行方向之间的夹角。
一个准确的舱位角设计可以确保图像中的特征被恰当地记录下来,并提供足够的信息用于制图和测量。
在航测舱位角的设计中,需要考虑许多因素。
首先是地形的复杂性和起伏度。
不同的地形要求不同的舱位角,以保证获取到足够的细节信息。
特别是在山地或丘陵地区,航测相机的角度需要随着地形的变化而调整,以保证图像中的特征能够清晰可见。
其次是航测任务的具体要求。
不同的测绘任务需要不同的航测舱位角,以满足特定的测量精度和覆盖范围。
例如,在进行地形测量时,舱位角设计需要考虑地面高程变化的分辨率,以获取精确的地形数据。
而在进行城市或道路建设规划时,舱位角的设计则需要考虑建筑物或道路的细节特征,以提供详细的测绘信息。
舱位角的设计还需要考虑航测相机的技术参数和性能。
例如,相机的焦距、像素大小和感光度等,都会对舱位角的设计产生影响。
在实际航测中,需要通过计算和模拟来确定最佳的舱位角,以满足测量要求并保证图像质量。
为了实现舱位角的准确设计,航测舱位角测量仪成为了必不可少的工具。
航测舱位角测量仪是一种专门测量舱位角的设备,它可以通过光学测量原理来确定相机与地面之间的角度。
舱位角测量仪通过与GPS系统或飞行控制系统的协同工作,确保测量的准确性和稳定性。
除了舱位角测量仪,航测舱位角的设计还可以借助模拟和分析软件来完成。
这些软件可以模拟不同的舱位角设计方案,并提供预估的测量精度和覆盖范围。
通过对不同方案的比较和评估,航测人员可以选择最佳的舱位角设计方案,以提高测绘数据的质量和效率。
舵角指示器工作原理
舵角指示器工作原理舵角指示器工作原理什么是舵角指示器?舵角指示器是一种用于飞机仪表板的设备,用于显示飞机的舵角,即飞机相对于水平飞行面的转动角度。
它为飞行员提供了关于飞机舵角的重要信息,帮助他们进行飞行控制和导航。
舵角的定义和测量原理•舵角是指飞机的纵向和横向轴相对于水平面的旋转角度。
•舵角可以分为俯仰角和滚转角。
•俯仰角是指飞机的纵向轴相对于水平面的旋转角度。
•滚转角是指飞机的横向轴相对于水平面的旋转角度。
舵角指示器的工作原理1.传感器采集数据:舵角指示器通过内置的传感器采集飞机的姿态数据,包括俯仰角和滚转角。
这些传感器通常是陀螺仪或加速度计等惯性传感器,能够精确测量飞机的旋转角度。
2.数据处理和校正:采集到的姿态数据经过处理和校正,以确保准确性和稳定性。
这通常包括滤波和校正算法的应用,以去除由传感器误差或干扰引起的不准确数据。
3.显示舵角信息:校正后的姿态数据通过舵角指示器的显示器进行显示。
舵角指示器通常具有一个旋转式指针或数字显示,用于显示飞机的俯仰角和滚转角。
这使得飞行员能够实时监控飞机的舵角状态。
4.附加功能:一些高级的舵角指示器还可能提供额外的功能,如警告和报警功能。
例如,当飞机的舵角超过安全范围时,舵角指示器可能会发出声音或光信号,提醒飞行员及时采取措施。
舵角指示器的应用•舵角指示器是飞机驾驶舱中必不可少的仪器之一,对于飞行员的飞行控制和导航至关重要。
•飞行员可以通过舵角指示器准确了解飞机的姿态并进行相应的操纵,以保持飞机平衡和稳定。
•舵角指示器还可以帮助飞行员进行姿态控制,如实施机动、滑行、起飞和着陆等。
总而言之,舵角指示器是一种关键的航空仪器,通过测量和显示飞机的舵角信息,为飞行员提供重要的飞行控制和导航帮助。
它的工作原理基于传感器数据采集、数据处理和显示舵角信息。
正确使用舵角指示器可以提高飞行安全性和飞行效率。
舵角指示器的优势和局限性优势•舵角指示器能够提供准确的飞机舵角信息,帮助飞行员更好地掌握飞行姿态和飞行控制。
数字式航向角指示器的设计
数字式航向角指示器的设计
赵波;高飞;王公浩
【期刊名称】《现代电子技术》
【年(卷),期】2005(28)13
【摘要】在各种导航系统、飞行器姿态控制、雷达天线跟踪等角位置检测系统中,常用自整角机(synchro)、旋转变压器(resolver)完成角位移的检测、传输、接收和变换等工作,为了实现自整角机和旋转变压器信号与计算机的接口,国内外已研制开发了自整角机/旋转变压器-数字转换模块.本文利用ZSZ/XSZ系列自整角/旋转变压器-数字转换模块和单片机设计制作了数字式航向角指示器,介绍了指示器的硬件电路及软件设计方法,设计制作的航向角指示器简单实用、工作稳定.
【总页数】4页(P67-69,73)
【作者】赵波;高飞;王公浩
【作者单位】海军航空工程学院,青岛分院,山东,青岛,266041;海军航空工程学院,青岛分院,山东,青岛,266041;海军航空工程学院,青岛分院,山东,青岛,266041
【正文语种】中文
【中图分类】TP216
【相关文献】
1.基于GPRS数据传输技术的航向角指示器的客户端设计 [J], 徐剑
2.声纳浮标处理系统测试设备中的航向角指示器研制 [J], 潘云芝;潘传勇;王崇斌
3.WST—2型数字式深度指示器 [J],
4.基于偏振光与MEMS陀螺的航向角测量系统设计 [J], 支炜;褚金奎;王寅龙
5.无线电罗盘自动测试系统航向角信号仿真设计 [J], 崔健;谈展中;潘涌泽
因版权原因,仅展示原文概要,查看原文内容请购买。
舵角指示器

舵角指示器简介舵角指示器是飞行器上常见的飞行仪表之一,用于显示飞行器的舵角情况。
舵角是指飞行器的舵面(如副翼、方向舵)与飞行器的机身之间的夹角,它对飞行器的操纵至关重要。
舵角指示器通过指针或数字显示飞行器的舵角,使飞行员能够准确控制飞行器的姿态和飞行方向。
功能舵角指示器的主要功能是提供准确的舵角信息,以帮助飞行员控制飞行器的姿态和飞行方向,确保飞行的安全和稳定。
以下是舵角指示器的主要功能:1. 实时显示舵角:舵角指示器通过指针或数字显示飞行器的舵角,并及时更新舵角信息。
飞行员可以根据指示器上显示的舵角信息调整飞行器的操纵,使飞行器保持预期的姿态。
2. 提供准确的舵角测量:舵角指示器使用精密的传感器和测量技术,能够准确测量飞行器的舵角,并将测量结果以可读的方式显示出来。
这使得飞行员能够准确地了解飞行器的舵角,从而做出正确的操纵动作。
3. 可视化界面:舵角指示器通常采用直观的界面设计,如指针、数字或进度条等,以便飞行员能够快速地获取舵角信息。
这种可视化界面使得飞行员能够一目了然地了解飞行器的舵角情况,提高了操纵飞行器的效率。
4. 报警功能:一些高级的舵角指示器还具有报警功能,当舵角超出安全范围时会发出警示信号,提醒飞行员采取相应的措施。
这种报警功能可以帮助飞行员在紧急情况下快速反应,保证飞行的安全。
应用领域舵角指示器广泛应用于各种飞行器中,包括民用飞机、军用飞机、直升机和无人机等。
它在以下几个方面发挥着重要作用:1. 飞行姿态控制:舵角指示器帮助飞行员控制飞行器的姿态,确保飞行器保持稳定的飞行状态。
飞行员可以通过观察舵角指示器上的舵角信息,及时调整飞行器的操纵,使其保持预期的姿态。
2. 方向控制:舵角指示器对于飞行器的方向控制也至关重要。
飞行员可以通过观察舵角指示器上方向舵的舵角信息,来判断飞行器的飞行方向,并做出相应的调整。
3. 危险警示:舵角指示器中的报警功能可以及时提醒飞行员飞行器的舵角是否超出安全范围,从而避免潜在的危险。
飞机仪表着陆系统及基本使用(本教程只适用于模拟飞行)

飞机仪表着陆系统及基本使用(本教程只适用于模拟飞行)相信大部分飞友在模拟飞行中对仪表着陆系统已经有了一个基本的认识,无论是B737还是A320等主流机型,着陆一般情况都会用到仪表着陆系统(Instrument Landing System,后简称为ILS)。
模拟飞行中,飞友一般喜欢在各大型机场起降,大型机场一般配备ILS,今天就来介绍下ILS以及飞机仪表。
本次教程主要是介绍通用飞机基本型仪表以及ILS系统(不适用于真实飞行)。
1. 作用:地面设备发射信号由机载设备接受对飞机进行水平、垂直引导以及距离引导2. 系统组成:地面设备:LOC(水平引导)GS(垂直引导)MB(距离引导)机载设备:VHF NAV接收机3.类别:分为I、II、IIIA、IIIB、IIIC类,在此ILS的分类就不多做介绍了ILS的信号分为两部分一部分做水平引导(LOC,下图A)一部分做垂直引导(GS,下图B)基本认识了GS和LOC过后来认识一下飞机上的设备(所用机模A2A C172)下图为频率输入面板下图为LOC/GS指示该仪表也可以作为仪表飞行是VOR指示指示器中横着的小圆点是偏航指示,每点为2.5度,飞行中如非返航道飞行,OBS选择为024,航道指示杆向右偏离两格,说明飞机左偏航,位于该导航台019航道上。
LOC指示杆满偏为10度。
在通用飞机上,手动进近可在GS的基础上参考PAPI灯如下图:基本型仪表ILS的判断根据该图可以判断,飞机低于正常下滑道以及偏离航向道,偏航位置位于正常下滑位置的左下方,对于通用行飞机,此图中的情况本人建议通过维持高度并进行水平的迅速修正恢复到正常下滑位置。
很多飞友还有个问题,就是小飞机不像喷气式客机,前段可以通过飞机自动驾驶来下高,并且很容易就能知道飞机当前速度下正常的下滑率是多少,这里告诉大家一个比较快速的计算方法。
在进近图上通常会标识出下滑角度,个别图会直接标出下滑梯度,梯度是什么东西呢?下滑梯度就是下降高度与水平距离的比值,一般情况为5.2%,对于只有下滑角的航图要计算下滑梯度其实也是很简单的(当然这个简单是针对计算器),相信大家对三角函数都不陌生,3度角要计算梯度就直接用计算器tan3°(自己算反正我是没算出来,本人读书不用功,请谅解)可以算出来约等于0.052用百分百表示就是5.2%。
领航计算尺的制作研究
领航计算尺的制作研究在航海和航空中为了准确测量经纬度,需要使用到领航计算尺。
领航计算尺是一种基于三角学原理的测量工具,它可以用于计算距离、方位角和航向角等信息,是非常重要的求导工具。
领航计算尺的原理领航计算尺的主要原理是利用相似三角形的原理来计算距离和方位角。
对于任意两点之间的距离,我们可以用直角三角形的勾股定理来计算。
而在海洋上,我们无法使用直角三角形计算距离,因为两个点之间的弧线不是直线。
因此,在海洋上我们需要使用大圆航线的概念来计算两点之间的距离。
这时候,领航计算尺就派上用场了。
它可以通过相似三角形的原理,计算两点之间经纬度的差值,并通过大圆航线的概念计算距离。
同时,可以使用方位角计算方向,计算船舶航向等信息。
领航计算尺的分类根据功能和设计,领航计算尺可以分为以下几类:分度领航计算尺分度领航计算尺是应用最广泛的一种领航计算尺。
它的主要特点是规格统一,制作方便,同时可以实现快速准确计算。
分度领航计算尺通常是以尺寸、度数和比例尺为单位。
带计算功能的领航计算尺带计算功能的领航计算尺是在传统领航计算尺的基础上,加入了计算功能。
这种计算尺除了可以进行距离和方向的计算,同时还可以用来计算速度、时间和加速度等信息。
电子领航计算尺随着科技的发展,电子领航计算尺应运而生。
电子领航计算尺是一种使用电子技术和微处理器计算距离和方向等信息的计算尺,它可以实现数据的存储和处理,并能够与其他设备进行联网。
领航计算尺的制作方法领航计算尺的制作方法通常是基于三角形的原理,这需要使用到比例尺、直角三角形和相似三角形等数学知识。
制作过程领航计算尺的制作步骤如下:第一步:确定比例尺和规格首先需要确定领航计算尺的比例尺和规格。
比例尺决定了尺子的大小,规格决定了尺子的精度等级。
第二步:确定基线和方向根据实际需求确定基线和方向,基线可以是两点之间的距离,方向可以是两点之间的方向角。
第三步:绘制比例尺和直角三角形根据比例尺绘制出尺子,同时绘制出两点之间的直角三角形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测试・测量・自动化
数字式航向角指示器的设计
赵 波, 高 飞, 王公浩
( 海军航空工程学院 青岛分院 山东 青岛 266041)
摘 要: 在各种导航系统、飞行器姿态控制、雷达天线跟踪等角位置检测系统中, 常用自整角机 ( synch ro ) 、旋转变压 器 ( reso lver) 完成角位移的检测、传输、接收和变换等工作, 为了实现自整角机和旋转变压器信号与计算机的接口, 国内 外已研制开发了自整角机 旋转变压器- 数字转换模块。 本文利用 ZSZ XSZ 系列自整角 旋转变压器- 数字转换模块和单 片机设计制作了数字式航向角指示器, 介绍了指示器的硬件电路及软件设计方法, 设计制作的航向角指示器简单实用、工 作稳定。 关键词: 自整角机; 旋转变压器; 航向角指示器; 数字转换模块 中图分类号: T P 216 文献标识码: B 文章编号: 1004 373X ( 2005) 13 067 03
2122 k 8 , 按规定要求 R 1 , R 2 为同型号精密电阻, 功率不小
= K E 0 sin Ξt sin Η co s Υ) = K E 0 sin Ξt sin ( Η- Υ
K E 0 sin Ξtco s Η sin Υ
) = K E 0 sin Ξt ( sin Η co s Υ- co s Η sin Υ
V 1 = K E 0 sin Ξt sin Η V 2 = K E 0 sin Ξtco s Η
11113 型号选择
ZSZ XSZ 系列转换器型号命名方法如图 2 所示。
其中: Η为旋转变压器轴角。 如果转换器是 ZSZ 系列旋转变压器- 数字转换器, 则 旋转变压器 4 线输出应连接到转换器的 S1, S2, S3, S4 引 脚端, 此时斯科特变压器只起降压和隔离作用。 假设可逆计数器当前字状态为 Υ , 高速数字式正余弦 乘法器将 V 1 乘以 co s Υ , V 2 乘以 sin Υ , 得到:
( 3) 速度电压输出端 V EL
脚, 32 个外部双向输入 输出 ( I O ) 端口, 同时内含 2 个 外中断口, 2 个 16 位可编程定时计数器, 2 个全双工串行 通信口, 片内含 4 kB 的可反复擦写的只读程序存储器 (PEROM ) 和 128 B 的随机存取数据存储器 (RAM ) , 兼 容标准M CS 51 指令系统, A T 89C51 将通用的微处理器 和可反复擦写的 FLA SH 存储器结合在一起可有效地降 低开发成本。 A T 89C51 可以按照常规方法进行编程, 也可 以在线编程。
A T 89C51 单片机由美国 A TM EL 公司生产, 40 个引
包括+ 5 V , + 15 V , - 15 V 和 GND ( 地) 4 个引脚。 直流电源允许波动范围为±10% , 不允许超过此范围加 电, 更不允许电源加反的情况出现。
( 2) 输入模拟信号引脚
转换器的 S1, S2, S3 引脚接自整角机的 3 线输出端, 或者转换器的 S1, S2, S3, S4 引脚接旋转变压器 4 线输出 端, RH 和 RL 接参考信号。
A bs tra c t: In va riou s cap e po sition exam ina tion system , fo r exam p le, naviga tion system , flew ca rriage con tro l, rada r an tenna fo l2
终使转换器处于动态平衡。若 IN T 持续时间小于忙脉冲间 68
《现代电子技术》2005 年第 13 期总第 204 期
反相器 54L S06 的输出端对应连接, 当要显示信息时, 由
P0 口的低 4 位输出 BCD 码后经过 54L S48 驱动译码器输
测试・测量・自动化
熄灭, 这样采用了轮流点亮各个L ED , 在每一位停留 5 m s 左右, 利用人的视觉暂留效应, 好像 4 支 L ED 是同时点亮 的, 这种方法由于各个 L ED 数码管共用一个段码输出口 分时轮流通电, 大大简化了硬件电路。
Ke yw o rds : synch ro; reso lver; cou rse ang le ind ica to r; d ig ita l converter
d ig ita l converto r and sing le ch ip to
design d ig ita l cou rse ang le ind ica to r, in troduces the ind ica to r′ s ha rdw a re electric circu it and softw a re design m ethod 1T he ind ica to r is
( 5) 禁止信号输入端 IN T
代表旋转变压器轴角信号的并行自然二进制码送到单片 机的 P1, P2 口, 经过运算程序将并行自然二进制码转换
BCD 码送到显示电路。
该信号的加入, 使输出数据稳定在 IN T 加入的时刻, 同时 IN T 将切断转换器内部跟踪环路, 使转换器处于非跟 踪状态。 而当该信号撤消后, 转换器将要花一定的一
) 趋近于零, 当这一过程完成时, 可 个闭环回路使 sin ( Η- Υ ) 在转换器的额定精度范围内, 等于 逆计数器的字状态 ( Υ
旋转变压器的轴角 Η 。 11112 引脚功能
( 1) 直流供电引脚
于 011 W , 相对误差不大于 011% , 绝对误差不大于 2% 。 若 使用电阻 R H 其误差范围应小于 10% 。 112 译码转换与显示电路 译码转换与显示电路采用 89C51 单片机, 54L S48BCD 码至 7 段驱动译码器和数码管电路组成, 如图 3 所示。
在各种导航系统、飞行器姿态控制、雷达天线跟踪等 角位置检测系统中, 常用自整角机 ( synch ro ) 、旋转变压 器 ( reso lver ) 完成角位移的检测、传输、接收和变换等工 作, 现在的自整角机和旋转变压器已经能够满足较高的准 确度要求, 并能在很宽的温度、湿度、振动和冲击环境条 件下正常工作, 随着计算机技术的发展, 机载仪表系统也 由过去的机械仪表向电子仪表 ( EF IS) 发展, 为了实现自 整角机和旋转变压器信号与计算机接口, 国外研制开发了
( 小于 179° 阶跃响应时间) 来重新跟踪输入信号的变化, 最
显示电路用 L ED 数码管组成, L ED 数码管显示器具 有亮度高、全天候的特点, 在仪器设计中应用广泛, 本电 路采用动态显示, 动态显示实际上是一种动态扫描显示过 程, P0 口输出 BCD 码和片选信号, 经 54L S48 驱动译码器 和六反相器 54L S06 加到数码管电路, 4 个数码管的段选 信号与 54L S48 译码器相连, 而 4 个数码管的共阴端与六
10 位 ZSZ 旋转变压器- 数字转换模块输出的 10 位
该端的输出信号是一个与输入轴角角速度成比例的直 流模拟信号, V EL 的极性与输入轴角的转向有关 ( 数码增大 时为负, 减小时为正) , 幅值与输入轴角角速度成正比。
( 4) “忙”信号输出端 BU SY
当输入模拟信号变化一个转换器最低有效位对应的 小角度时, 该端就输出一个约 215 Λs 宽的正脉冲, 当 BU SY 为高电平时, 表示转换器内部正处于跟踪转换状 态, 此时数据输出不稳定; 当 BU SY 为低电平时, 表示转 换器内部已转换结束, 此时数据输出稳定有效, 可以读取。
SDC RDC1700 系列自整角 旋转变压器- 数字转换模块,
111 自整角 旋转变压器- 数字转换电路 自整角 旋转变压器- 数字转换电路直接采用中国船 舶重工集团公司第七一六研究所研制开发的 ZSZ XSZ 系 列自整角机 旋转变压器- 数字转换模块。 11111 模块工作原理
ZSZ XSZ 系列转换器是一种采用跟踪技术和模块化
D es ign of D ig ita l Course Angle Ind ica tor
ZHAO Bo, GAO Fei,W AN G Gonghao
(Q ingdao B ranch, N avy A viation Engineering In stitu te, Q ingdao, 266041, Ch ina)
low , w e a lw ays u se synch ro and reso lver to rea lize the ta sk of exam ina tion 1deliver receiver and tran sfo rm a tion of the cap e m oves1 In o rder to ach ieve the in terface betw een synch ro reso lrer and com p u ter, dom estic and in terna tiona l have develop ed synch ro reso lver d ig ita l converto r1T h is p ap er in troduces how to m ake u se of the ZSZ XSZ series synch ro reso lver si m p le u tility and stab ility1
结构的自整角 旋转变压器- 数字转换器, 采用二阶伺服 回路, 输出与 T TL 电平兼容的并行自然二进制码, 具体电 路由斯科特 ( sco t t ) 变压器、 高速数字式正余弦乘法器、 误 差放大器、 相敏解调器、 压控振荡器、 可逆计数器组成, 如 图 1 所示。
与之相适应国内也开发了 ZSZ XSZ 系列自整角机 旋转 变压器- 数字转换模块。 本文介绍了利用 ZSZ XSZ 系列 自整角 旋转变压器- 数字转换模块和单片机设计制作的 数字式航向角指示器, 介绍了硬件电路的组成及软件设计 方法, 整个系统简单实用、 工作稳定。 1 硬件电路 硬件电路包括自整角 旋转变压器- 数字转换电路和 单片机组成的数码转换与显示电路。