《有限元基础教程》_【MATLAB算例】3.2.5(2)__四杆桁架结构的有限元分析(Bar2D2Node)
基于matlab的四杆机构运动分析
基于matlab的四杆机构运动分析一、四杆机构基本概念四杆机构是一种通过变换连杆长度,改变机构运动形态的机械系统。
四杆机构通常由固定连杆、推动连杆、连接杆和工作连杆四个连杆组成,其中固定连杆和推动连杆固定不动,连接杆和工作连杆则沿固定轴线的方向做平动或旋转运动。
四杆机构的基本构造如下图所示:四杆机构的四个连杆的长度和构造参数,以及驱动机构的运动决定了机构的运动特性。
在进行四杆机构运动分析时,需要通过求解运动学关系式和动力学方程,得到连杆的运动规律和力学特性。
二、四杆机构运动学分析1.运动学基本方程四杆机构的运动学分析基本方程是连杆长度变化的定理,即:l₁²+l₂²-2l₁l₂cosθ₂=l₃²+l₄²-2l₃l₄cosθ₄其中,l₁,l₂分别为固定连杆和推动连杆长度;l₃,l₄分别为连接杆和工作连杆长度;θ₂,θ₄分别为推动连杆和工作连杆的夹角。
2.运动学求解方法根据四杆机构运动学基本方程,可以求解机构中任意连杆的角度和位置,从而分析机构运动规律。
在matlab程序中,运动分析可以采用分析法或图解法。
分析法通常采用向量法或坐标法,即将四杆机构中各连杆和运动副的运动量表示为向量或坐标,然后根据连杆长度变化的定理,求解四个未知角度θ₁、θ₂、θ₃、θ₄。
图解法则先通过画图确定机构的运动规律,在图上求解连杆的角度。
比如可以采用伯格(Bourgeois)图法或恰普利恩(Chaplygin)图法等。
四杆机构动力学分析基本方程包括平衡方程和力平衡方程。
平衡方程:当四杆机构处于平衡状态时,连杆的受力关系可以表示为:ΣF=0其中ΣF为各连杆受力的合力。
ΣF=m×a其中,m为每个连杆的质量,a为连杆的加速度。
四杆机构动力学求解方法以matlab为工具,可借助matlab的求解器完成求解。
具体可以利用matlab的优化工具箱、控制工具箱和系统动态学工具箱等,来实现机构模型的动态模拟、仿真和优化设计。
2D四杆桁架结构的有限元分析实例
实例:2D四杆桁架结构的有限元分析学习有限元方法的一个最佳途径,就是在充分掌握基本概念的基础上亲自编写有限元分析程序,这就需要一个良好的编程环境或平台。
MATLAB软件就是这样一个平台,它以功能强大、编程逻辑直观、使用方便见长。
将提供有限元分析中主要单元完整的MATLAB程序,并给出详细的说明。
1D杆单元的有限元分析MATLAB程序(Bar1D2Node)最简单的线性杆单元的程序应该包括单元刚度矩阵、单元组装、单元应力等几个基本计算程序。
下面给出编写的线性杆单元的四个MATLAB函数。
Bar1D2Node _Stiffness(E,A,L)该函数计算单元的刚度矩阵,输入弹性模量E,横截面积A和长度L,输出单元刚度矩阵k(2×2)。
Bar1D2Node _Assembly(KK,k,i,j)该函数进行单元刚度矩阵的组装,输入单元刚度矩阵k,单元的节点编号i、j,输出整体刚度矩阵KK。
Bar1D2Node _Stress(k,u,A)该函数计算单元的应力,输入单元刚度矩阵k、单元的位移列阵u(2×1)以及横截面积A计算单元应力矢量,输出单元应力stress。
Bar1D2Node_Force(k,u)该函数计算单元节点力矢量,输入单元刚度矩阵k和单元的位移列阵u(2×1),输出2×1的单元节点力矢量forces。
基于1D杆单元的有限元分析的基本公式,写出具体实现以上每个函数的MATLAB程序如下。
%%%%%%%%%%% Bar1D2Node %% begin %%%%%%%%%function k=Bar1D2Node_Stiffness(E, A, L)%该函数计算单元的刚度矩阵%输入弹性模量E,横截面积A和长度L%输出单元刚度矩阵k(2×2)%---------------------------------------k=[E*A/L -E*A/L; -E*A/L E*A/L];%%%%%%%%%%%%%%%%%%%%%%%%%%function z=Bar1D2Node_Assembly(KK,k,i,j)%该函数进行单元刚度矩阵的组装%输入单元刚度矩阵k,单元的节点编号i、j%输出整体刚度矩阵KK%-----------------------------------DOF(1)=i;DOF(2)=j;for n1=1:2for n2=1:2KK(DOF(n1), DOF(n2))= KK(DOF(n1), DOF(n2))+k(n1, n2);endendz=KK;%------------------------------------------------------------function stress=Bar1D2Node_Stress(k, u, A)%该函数计算单元的应力%输入单元刚度矩阵k, 单元的位移列阵u(2×1)%输入横截面积A计算单元应力矢量%输出单元应力stress%-----------------------------------stress=k*u/A;%-----------------------------------------------------------%%%%%%%%%%%%%%%%%%%%%%%%%function forces=Bar1D2Node_Force(k, u)%该函数计算单元节点力矢量%输入单元刚度矩阵k和单元的位移列阵u(2×1)%输出2×1的单元节点力分量forces%-----------------------------------------forces=k*u;%%%%%%%%%%% Bar1D2Node %% end %%%%%%%%%【四杆桁架结构的有限元分析—数学推导】如图所示的结构,各杆的弹性模量和横截面积都为E=29.54×10N/mm2, A=100mm 2,试求解该结构的节点位移、单元应力以及支反力。
有限元分析基础教程

有限元分析基础教程前言有限元分析已经在教学、科研以及工程应用中成为重要而又普及的数值分析方法和工具;该基础教程力求提供具备现代特色的实用教程。
在教材的内容体系上综合考虑有限元方法的力学分析原理、建模技巧、应用领域、软件平台、实例分析这几个方面,按照教科书的方式深入浅出地叙述有限元方法,并体现出有限元原理“在使用中学习,在学习中使用”的交互式特点,在介绍每一种单元的同时,提供完整的典型推导实例、MATLAB实际编程以及ANSYS应用数值算例,并且给出的各种类型的算例都具有较好的前后对应性,使学员在学习分析原理的同时,也进行实际编程和有限元分析软件的操作,经历实例建模、求解、分析和结果评判的全过程,在实践的基础上深刻理解和掌握有限元分析方法。
一本基础教材应该在培养学员掌握坚实的基础理论、系统的专业知识方面发挥作用,因此,教材不但要提供系统的、具有一定深度的基础理论,还要介绍相关的应用领域,以给学员进一步学习提供扩展空间,本教程正是按照这一思路进行设计的;全书的内容包括两个部分,共分9章;第一部分为有限元分析基本原理,包括第1章至第5章,内容有:绪论、有限元分析过程的概要、杆梁结构分析的有限元方法、连续体结构分析的有限元方法、有限元分析中的若干问题讨论;第二部分为有限元分析的典型应用领域,包括第6章至第9章,内容有:静力结构的有限元分析、结构振动的有限元分析、传热过程的有限元分析、弹塑性材料的有限元分析。
在基本原理方面,以基本变量、基本方程、求解原理、单元构建等一系列规范的方式进行介绍;在阐述有限元分析与应用方面,采用典型例题、MATLAB程序及算例、ANSYS算例的方式,以体现出分析建模的不同阶段和层次,引导学员领会有限元方法的实质,还提供有大量的练习题。
本教程的重点是强调有限元方法的实质理解和融会贯通,力求精而透,强调学员综合能力(掌握和应用有限元方法)的培养,为学员亲自参与建模、以及使用先进的有限元软件平台提供较好的素材;同时,给学员进一步学习提供新的空间。
桁架优化matlab算法
桁架优化matlab算法桁架优化Matlab 算法【引言】桁架是一种常见的结构体系,它由连接节点的杆件构成。
桁架通常在工程设计中用于支撑、加固或分散载荷。
优化桁架结构对于减少材料使用、提高结构强度和降低成本非常重要。
Matlab 是一种功能强大的计算软件,它提供了许多优化算法和工具。
本文将介绍如何使用Matlab 进行桁架优化的算法实现。
【第一步- 建立力学模型】桁架的力学模型是优化过程的基础。
在Matlab 中,可以使用矩阵表示力学模型。
首先,我们需要定义桁架的节点和杆件。
节点用坐标表示,杆件用节点之间的连接关系表示。
根据节点和杆件的定义,可以构建节点坐标矩阵和链接关系矩阵。
【第二步- 约束条件和目标函数】在进行桁架优化时,通常会遇到一些约束条件和目标函数。
典型的约束条件可能包括杆件的最大和最小尺寸限制、节点的最大和最小高度限制等。
目标函数可以是桁架的重量、刚度或模态频率等。
根据具体问题,我们需要定义合适的约束条件和目标函数。
【第三步- 优化算法】Matlab 提供了许多优化算法,如遗传算法、粒子群优化算法等。
我们需要选择合适的算法来解决桁架优化问题。
对于离散变量的优化,可以使用遗传算法。
对于连续变量的优化,可以使用粒子群优化算法。
选择合适的算法后,可以将约束条件和目标函数输入优化算法,得到优化结果。
【第四步- 结果分析】优化算法完成后,我们需要对结果进行分析。
可以通过绘制优化后的桁架结构来比较与原始结构的差异。
此外,还可以从目标函数的值来评估优化结果。
如果目标函数的值较小,则说明优化结果较优。
【第五步- 进一步优化】根据结果的分析,我们可以进一步优化桁架结构。
可以尝试使用不同的约束条件和目标函数,或者尝试其他优化算法。
通过多次迭代优化,逐步优化桁架结构,以得到更好的结果。
【第六步- 结论】通过以上的一步一步的回答,我们可以得出结论,桁架优化的Matlab 算法是一个有效的方法。
通过建立力学模型、定义约束条件和目标函数、选择合适的优化算法,我们可以获得优化后的桁架结构。
四节点四边形单元悬臂梁的matlab有限元编程-概述说明以及解释

四节点四边形单元悬臂梁的matlab有限元编程-概述说明以及解释1.引言1.1 概述悬臂梁是一种常见的结构形式,在工程领域中被广泛应用。
四节点四边形单元是有限元分析中常用的元素类型,能够准确地模拟悬臂梁的受力情况。
Matlab是一种强大的数学工具,可以用来编程实现有限元分析。
本文旨在介绍如何利用Matlab进行四节点四边形单元悬臂梁的有限元编程,并对其进行分析和展望。
通过本文的研究,我们希望能够为工程实践提供一定的参考和指导,同时也为进一步的研究提供基础。
1.2 文章结构本文主要分为三个部分:引言、正文和结论。
引言部分将介绍文章的背景和目的,明确文章研究的问题和意义。
正文部分包括理论基础、Matlab有限元编程介绍和四节点四边形单元悬臂梁建模三个小节。
其中,理论基础将介绍与悬臂梁有关的理论知识,Matlab有限元编程介绍将详细介绍如何使用Matlab进行有限元分析,最后,四节点四边形单元悬臂梁建模将展示具体的悬臂梁建模过程。
结论部分将对实验结果进行分析与总结,探讨本研究的意义和潜在研究方向。
1.3 目的本文旨在利用Matlab编程实现四节点四边形单元悬臂梁的有限元分析,通过建立合适的数学模型,探索悬臂梁在受力状态下的力学特性。
具体目的包括:1. 建立悬臂梁的有限元数学模型,包括节点、单元和材料参数的设置;2. 实现悬臂梁在不同受力情况下的应力、应变、位移等力学性能的计算;3. 分析悬臂梁受力情况下的应力分布情况,探讨悬臂梁的破坏模式和极限承载能力;4. 验证Matlab编程方法的有效性和准确性,为工程实际中悬臂梁等复杂结构的有限元分析提供参考和借鉴。
通过本文的研究,旨在为工程实践提供可靠的数值计算工具和理论分析方法,为解决工程结构强度和稳定性问题提供一定的指导和参考价值。
2.正文2.1 理论基础在介绍四节点四边形单元悬臂梁的Matlab有限元编程之前,我们首先需要了解一些基本的理论知识。
悬臂梁是一种常见的结构形式,在工程领域中广泛应用于桥梁、建筑物等领域。
matlab桁架结构有限元计算
matlab桁架结构有限元计算摘要:一、引言- 介绍MATLAB在桁架结构有限元计算中的应用- 说明本文的主要内容和结构二、有限元计算原理- 有限元方法的背景和基本原理- 有限元方法在桁架结构分析中的应用三、MATLAB实现桁架结构有限元计算- MATLAB的基本操作和编程基础- 使用MATLAB进行桁架结构有限元计算的步骤和示例四、MATLAB桁架结构有限元计算的应用- 分析不同桁架结构的特点和计算结果- 探讨MATLAB在桁架结构有限元计算中的优势和局限五、结论- 总结MATLAB在桁架结构有限元计算中的应用和优势- 展望MATLAB在桁架结构分析中的未来发展方向正文:一、引言随着计算机技术的不断发展,有限元方法已经成为工程界解决复杂问题的重要手段。
MATLAB作为一款功能强大的数学软件,可以方便地实现桁架结构的有限元计算。
本文将介绍MATLAB在桁架结构有限元计算中的应用,并详细阐述其操作方法和计算原理。
二、有限元计算原理1.有限元方法的背景和基本原理有限元法是一种数值分析方法,通过将连续的求解域离散为离散的单元,将复杂的问题转化为求解单元的线性或非线性方程组。
有限元方法具有适应性强、精度高、计算效率高等优点,广泛应用于固体力学、流体力学、传热等领域。
2.有限元方法在桁架结构分析中的应用桁架结构是一种由杆件组成的结构,其节点只有三个自由度。
有限元方法可以有效地分析桁架结构的强度、刚度和稳定性,为工程设计提供理论依据。
三、MATLAB实现桁架结构有限元计算1.MATLAB的基本操作和编程基础MATLAB是一种功能强大的数学软件,可以进行矩阵运算、绘制图形、编写程序等操作。
在MATLAB中,用户可以通过编写脚本文件或使用图形界面进行各种计算和分析。
2.使用MATLAB进行桁架结构有限元计算的步骤和示例(1) 建立桁架结构模型:根据实际结构绘制桁架的节点和杆件,确定各节点的三自由度。
(2) 离散化:将桁架结构离散为有限个单元,每个单元包含若干个节点。
【ANSYS算例】3.2.5(4)-四杆桁架结构的有限元分析(GUI)及命令流
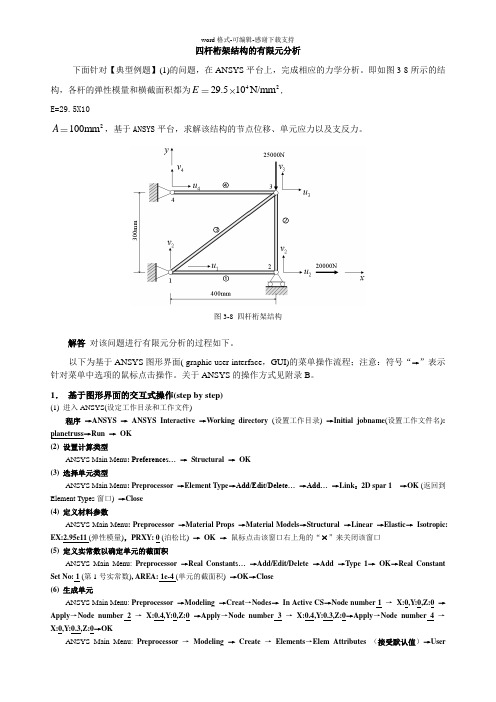
四杆桁架结构的有限元分析下面针对【典型例题】(1)的问题,在ANSYS 平台上,完成相应的力学分析。
即如图3-8所示的结构,各杆的弹性模量和横截面积都为4229.510N/mm E,E=29.5X10 2100mm A ,基于ANSYS 平台,求解该结构的节点位移、单元应力以及支反力。
图3-8 四杆桁架结构解答 对该问题进行有限元分析的过程如下。
以下为基于ANSYS 图形界面( graphic user interface ,GUI)的菜单操作流程;注意:符号“→”表示针对菜单中选项的鼠标点击操作。
关于ANSYS 的操作方式见附录B 。
1. 基于图形界面的交互式操作(step by step)(1) 进入ANSYS(设定工作目录和工作文件)程序 →ANSYS → ANSYS Interactive →Working directory (设置工作目录) →Initial jobname (设置工作文件名): planetruss →Run → OK(2) 设置计算类型ANSYS Main Menu : Preferences… → Structural → OK(3) 选择单元类型ANSYS Main Menu : Preprocessor →Element Type →Add/Edit/Delete… →Add… →Link :2D spar 1 →OK (返回到Element Types 窗口) →Close(4) 定义材料参数ANSYS Main Menu : Preprocessor →Material Props →Material Models →Structural →Linear →Elastic → Isotropic: EX:2.95e11 (弹性模量),PRXY: 0 (泊松比) → OK → 鼠标点击该窗口右上角的“ ”来关闭该窗口(5) 定义实常数以确定单元的截面积ANSYS Main Menu: Preprocessor →Real Constant s… →Add/Edit/Delete →Add →Type 1→ OK →Real Constant Set No: 1 (第1号实常数), AREA: 1e-4 (单元的截面积) →OK →Close(6) 生成单元 ANSYS Main Menu: Preprocessor →Modeling →Creat →Nodes → In Active CS →Node number 1 → X:0,Y:0,Z:0 →Apply →Node number 2 → X:0.4,Y:0,Z:0 →Apply →Node number 3 → X:0.4,Y:0.3,Z:0→Apply →Node number 4 → X:0,Y:0.3,Z:0→OKANSYS Main Menu: Preprocessor → Modeling → Create → Elements →Elem Attributes (接受默认值)→Usernumbered→Thru nodes→OK→选择节点1,2→Apply→选择节点2,3→Apply→选择节点1,3→Apply→选择节点3,4→Apply→OK(7)模型施加约束和外载添加位移的约束,分别将节点1 X和Y方向、节点2 Y方向、节点4的X和Y方向位移约束。
2D四杆桁架结构的有限元分析实例

2D四杆桁架结构的有限元分析实例2D四杆桁架结构是一种常见的结构形式,广泛应用于工程领域。
在进行结构设计和分析时,有限元分析是一种常用的方法,可以对结构进行力学性能和应力分布的分析。
下面将以一个具体的例子来介绍2D四杆桁架结构的有限元分析。
```A*/\/\/\*-------*BC```该桁架结构由四根杆件构成,材料为钢,杆件截面可视为圆形。
假设桁架结构的高度为H,宽度为W,杆件的直径为D,且杆件AB和BC的长度为L。
首先,我们需要将该桁架结构离散为有限元网格。
可以采用等距离离散方法,在杆件AB上取N个节点,在杆件BC上取M个节点。
每个节点的坐标可以通过计算得到。
接下来,我们需要确定边界条件。
假设桁架结构的支座在节点A和C 处。
我们可以将节点A和C固定,即其位移为零,这是考虑到节点A和C作为支座点不会产生水平和竖直的位移。
然后,我们需要为杆件的材料属性和截面属性建立数学模型。
假设桁架结构的钢材的弹性模量为E,泊松比为ν。
另外,我们需要确定杆件的截面半径r。
接下来,我们需要确定桁架结构的荷载。
假设在节点B作用一个竖直向下的荷载P。
这个荷载会使得杆件AB和杆件BC受到拉力。
然后,我们可以使用有限元软件进行计算。
在计算中,我们可以采用线性弹性模型进行计算,即假设所有杆件在加载之前是弹性的。
在计算中,我们可以使用有限元方法对每个单元进行力学性能和应力分布的分析。
可以使用线性弹性有限元方法,如直接刚度法或变分法等。
在计算得到每个单元的力学性能和应力分布后,我们可以进一步分析整个桁架结构的强度和刚度。
可以计算整个结构的位移、载荷和应力等。
最后,我们可以通过对结果进行后处理和分析,来评估桁架结构的性能和稳定性。
可以计算结构的应力、变形和应变等。
综上所述,2D四杆桁架结构的有限元分析可以通过离散桁架结构为有限元网格,确定边界条件、材料和截面属性,施加荷载,并使用有限元软件进行计算。
通过对每个单元的力学性能和应力分布进行分析,并综合整个结构的性能和稳定性,可以得到结构的位移、载荷和应力等信息。
桁架结构及有限元分析MATLAB

桁架结构及有限元分析MATLAB桁架结构是一种由杆件和节点连接而成的结构系统。
它的主要特点是具有良好的刚性和承载能力,适用于跨度较大的建筑物或桥梁。
桁架结构的设计和分析是工程领域中重要的课题。
有限元分析是一种常用的方法,用于对桁架结构进行力学和结构分析。
MATLAB是一种强大的数学建模和计算工具,可以方便地进行有限元分析。
在进行桁架结构的有限元分析之前,首先需要进行结构的建模。
可以使用MATLAB中的节点和杆件来建立桁架结构的几何模型。
节点代表结构中的连接点,杆件代表连接节点的杆件。
接下来,需要将结构分割为有限元网格。
在MATLAB中,可以使用二维和三维有限元网格生成函数来生成网格。
生成的网格可以根据需要的精度进行调整。
每个有限元包含一个或多个节点和杆件,用于描述局部的力学行为。
在有限元分析中,需要考虑材料的力学性质。
可以通过定义材料的模量、泊松比和密度等参数来描述材料的本构关系。
在MATLAB中,可以使用材料库函数来定义不同材料的力学性质。
进行有限元分析时,需要考虑结构的边界条件和加载条件。
边界条件包括固定边界和位移约束,加载条件可以是力、压力或扭矩等。
在MATLAB中,可以使用边界条件函数来定义结构的边界条件和加载条件。
在有限元分析的过程中,需要对结构进行求解。
可以使用线性或非线性求解算法来计算结构的位移和应力等。
MATLAB中提供了多种求解器和求解方法,可以根据需要选择适合的求解算法。
完成有限元分析后,可以进行结果的后处理。
可以使用MATLAB中的可视化工具来绘制结构的位移和应力云图,以及显示结构的反应力和形变等。
可以通过对结果进行分析和比较,评估结构的可靠性和安全性。
总之,使用MATLAB进行桁架结构的有限元分析可以帮助工程师深入了解结构的力学行为和性能。
它可以为结构的设计和优化提供依据,并帮助工程师制定提高结构性能的策略。
同时,MATLAB提供了丰富的功能和工具,使得桁架结构的分析和设计更加高效和准确。
有限元方法与MATLAB程序设计 第3章 桁架和刚架
Fe keUe
Ue TUe
结构坐标系下的 单元刚度方程
9
结构坐标系下单元刚度矩阵 ke T TkeT
c cos s sin
y
Fe keUe
y
i (xi , yi )
(xj, yj ) x j
x
结构坐标系
cos sin 0
0 1 0 1 0 e cos sin 0
0
ke
EA sin
Fyi
Fxj Fyj
EA l
0
1
0
0 0 0
0 1 0
0
vi
0 0
u v
j j
单元坐标系下的 1 0 1 0
单元刚度矩阵
ke
EA l
0
1
0 0
0 1
0 0
0
0
0
0
7
§3.1.3 整体坐标系下的单元刚度方程
Fxi Fxi cos Fyi sin Fyi Fxi sin Fyi cos Fxj Fxj cos Fyj sin
是结构坐标系x轴正方 向至单元坐标轴x 的角度
y
x
y Fxi i
Fxi Fyi Fyi
x
结构(整体)坐标系
Fyj Fxj sin Fyj cos
Fxi Fyi
Fxj
Fyj
e
cos
sin
0
0
sin cos
0 0
0 0
cos sin
0
e
Fxi
e0Fyi源自sin cosFxj
Fyj
Fe TFe Ue TUe
cos
T sin
0
0
sin cos
用matlab分析四杆机构

首先创建函数FoutBarPosition,函数fsolve通过他确定。
function t=fourbarposition(th,th2,L2,L3,L4,L1)t=[L2*cos(th2)+L3*cos(th(1))-L4*cos(th(2))-L1;…L2*sin(th2)+L3*sin(th(1))-L4*sin(th(2))];主程序如下:disp '* ** *** 平面四杆机构的运动分析*** ***'L1=304.8;L2=101.6;L3=254.0;L4=177.8;%给定已知量,各杆长L1,L2,L3,L4th2=[0:1/6:2]*pi; %曲柄输入角度从0至360度,步长为pi/6th34=zeros(length(th2),2); %建立一个N行2列的零矩阵,第一列存放options=optimset('display','off'); %θ_3,第二列存放θ_3for m=1:length(th2) %建立for循环,求解θ_3,θ_4th34(m,:)=fsolve('fourbarposition',[1 1],…%调用fsove函数求解关于θ_3,θ_4options,th2(m),L2,L3,L4,L1); %的非线性超越方程,结果保存在th34中endy=L2*sin(th2)+L3*sin(th34(:,1)');%连杆3的D端点Y坐标值x=L2*cos(th2)+L3*cos(th34(:,1)');%连杆3的D端点X坐标值xx=[L2*cos(th2)]; %连杆3的C端点X坐标值yy=[L2*sin(th2)]; %连杆3的C端点Y坐标值figure(1)plot([x;xx],[y;yy],'k',[0 L1],[0 0],…%绘制连杆3的几个位置点'k--^',x,y,'ko',xx,yy,'ks')title('连杆3的几个位置点')xlabel('水平方向')ylabel('垂直方向')axis equal %XY坐标均衡th2=[0:2/72:2]*pi; %重新细分曲柄输入角度θ_2,步长为5度th34=zeros(length(th2),2);options=optimset('display','off');form=1:length(th2)th34(m,:)=fsolve('fourbarposition',[1 1],…options,th2(m),L2,L3,L4,L1);endfigure(2)plot(th2*180/pi,th34(:,1),th2*180/pi,th34(:,2)) %绘制连杆3的角位移关于曲柄2的角位移图plot(th2*180/pi,th34(:,1)*180/pi,…th2*180/pi,th34(:,2)*180/pi)%绘制摇杆4的角位移关于曲柄2的角位移图axis([0360 0170])%确定XY边界值grid %图形加网格xlabel('主动件转角\theta_2(度)')ylabel('从动件角位移(度)')title('角位移线图')text(120,120,'摇杆4角位移')text(150,40,'连杆3角位移')w2=250; %设定曲柄角速度for i=1:length(th2)A=[-L3*sin(th34(i,1))L4*sin(th34(i,2));…L3*cos(th34(i,1)) -L4*cos(th34(i,2))];B=[w2*L2*sin(th2(i));-w2*L2*cos(th2(i))];w=inv(A)*B;w3(i)=w(1);w4(i)=w(2);endfigure(3)plot(th2*180/pi,w3,th2*180/pi,w4); %绘制角速度线图axis([0 360 -175200])text(50,160,'摇杆4角速度(\omega_4)')text(220,130,'连杆3角速度(\omega_3)')gridxlabel('主动件转角\theta_2(度)')ylabel('从动件角速度(rad\cdot s^{-1})')title('角速度线图')for i=1:length(th2)C=[-L3*sin(th34(i,1)) L4*sin(th34(i,2));…L3*cos(th34(i,1))-L4*cos(th34(i,2))];D=[w2^2*L2*cos(th2(i))+w3(i)^2*L3*cos(th34(i,1))-w4(i)^2*L4*cos(th34(i,2));...w2^2*L2*sin(th2(i))+w3(i)^2*L3*sin(th34(i,1))-w4(i)^2*L4*sin(th34(i,2))];a=inv(C)*D;a3(i)=a(1);a4(i)=a(2);endfigure(4)plot(th2*180/pi,a3,th2*180/pi,a4); %绘制角加速度线图axis([0360-70000 65000])text(50,50000,'摇杆4角加速度(\alpha_4)')text(220,12000,'连杆3角加速度(\alpha_3)')gridxlabel('从动件角加速度')ylabel('从动件角加速度(rad\cdot s^{-2})')title('角加速度线图')disp '曲柄转角连杆转角-摇杆转角-连杆角速度-摇杆角速度-连杆加速度-摇杆加速度'ydcs=[th2'*180/pi,th34(:,1)*180/pi,th34(:,2)*180/pi,w3',w4',a3',a4'];disp(ydcs)>> ** * * * * 平面四杆机构的运动分析** *** *曲柄转角连杆转角-摇杆转角-连杆角速度-摇杆角速度-连杆加速度-摇杆加速度1.0e+004 *00.0044 0.0097 -0.0125 -0.0125-0.5478 4.84580.0005 0.0042 0.0094 -0.0126 -0.0107 0.2300 5.56300.0010 0.0039 0.0092 -0.0124 -0.00860.8946 6.05200.0015 0.0037 0.0091 -0.0119-0.0065 1.4143 6.29820.00200.0034 0.0090-0.0114 -0.0043 1.7801 6.31740.0025 0.0032 0.0089-0.0107-0.0021 2.0027 6.14670.0030 0.0030 0.0089 -0.0100 0.0000 2.1046 5.83390.0035 0.0028 0.0089 -0.0093 0.0020 2.1134 5.42720.00400.0026 0.0090 -0.00850.0038 2.0566 4.96870.0045 0.0025 0.0091 -0.00780.0054 1.9578 4.4918 0.00500.00230.0092 -0.0072 0.0069 1.8356 4.01980.00550.0022 0.0093 -0.00650.0082 1.7040 3.56800.00600.0021 0.0095 -0.0060 0.0094 1.5725 3.14500.0065 0.00190.0097 -0.0055 0.0104 1.4474 2.75450.00700.0018 0.0099 -0.00500.0113 1.33282.39680.0075 0.00170.0102 -0.00450.0121 1.2307 2.07020.0080 0.0017 0.0104-0.0041 0.0128 1.1425 1.77160.0085 0.00160.0107 -0.0037 0.0134 1.0687 1.49710.0090 0.0015 0.0110 -0.00340.0138 1.0095 1.24260.0095 0.0014 0.0112 -0.0030 0.0142 0.96531.00350.0100 0.0014 0.0115 -0.00270.0145 0.9364 0.77520.01050.0013 0.0118 -0.0024 0.0148 0.92320.5530 0.0110 0.00130.0121-0.0020 0.0149 0.9269 0.33190.01150.0013 0.0124 -0.0017 0.0150 0.9485 0.10690.0120 0.00120.0127 -0.0014 0.0150 0.9899-0.12760.01250.0012 0.0130 -0.0010 0.0149 1.0530 -0.37730.0130 0.0012 0.0133 -0.00060.0147 1.1404 -0.64810.0135 0.0012 0.0136 -0.0002 0.0145 1.2544 -0.94550.0140 0.0012 0.01390.0002 0.0141 1.3967 -1.27430.0145 0.00120.0142 0.0008 0.0136 1.5677 -1.6368 0.0150 0.0012 0.0144 0.0013 0.0129 1.7648 -2.03140.0155 0.0012 0.01470.00200.01211.9807 -2.4495 0.0160 0.0013 0.0149 0.00270.0112 2.2018 -2.8735 0.0165 0.0013 0.01510.00350.0101 2.4071-3.2754 0.01700.0014 0.0153 0.0044 0.0089 2.5697 -3.6186 0.0175 0.00150.01550.0053 0.0076 2.6616 -3.8650 0.0180 0.00160.01560.0063 0.0063 2.6609-3.9849 0.0185 0.0018 0.01570.0072 0.0049 2.5591 -3.96740.0190 0.0019 0.01580.0080 0.0035 2.3638 -3.82440.0195 0.0021 0.0159 0.0088 0.0022 2.0959 -3.58660.0200 0.00230.0159 0.0095 0.0010 1.7823 -3.2931 0.0205 0.00250.0159 0.0100 -0.0001 1.4487-2.9815 0.0210 0.0027 0.0159 0.0105-0.0011 1.1152-2.68090.0215 0.0029 0.0159 0.0108 -0.0020 0.7942-2.41030.0220 0.00310.0158 0.0111 -0.0028 0.4916 -2.17940.0225 0.0033 0.01580.0112 -0.0035 0.2086 -1.9913 0.02300.0036 0.01570.0112 -0.0042 -0.0565-1.84500.0235 0.0038 0.0156 0.0111 -0.0048 -0.3071 -1.73750.02400.0040 0.0155 0.0110-0.0054 -0.5475-1.66500.0245 0.0042 0.0154 0.0108 -0.0060-0.7817 -1.6233 0.0250 0.00440.01530.0104 -0.0065 -1.0139-1.6089 0.0255 0.0046 0.0151 0.0100-0.0071 -1.2479-1.61810.02600.0048 0.0150 0.0096-0.0077 -1.4868-1.6480 0.0265 0.00500.0148 0.0090 -0.0082-1.7336-1.69550.0270 0.00520.01460.0084 -0.0088-1.9905 -1.7574 0.02750.00540.0145 0.0076 -0.0095 -2.2588 -1.83040.0280 0.0055 0.0143 0.0068 -0.0101 -2.5391 -1.9100 0.0285 0.0056 0.01410.0058 -0.0108 -2.8305 -1.99100.0290 0.0057 0.0138 0.0048 -0.0115 -3.1300 -2.06600.02950.0058 0.01360.0037 -0.0122 -3.4326-2.1255 0.0300 0.0059 0.01330.0024 -0.0130 -3.7297 -2.15720.0305 0.00590.01310.0011 -0.0137 -4.0091 -2.1451 0.0310 0.00590.0128 -0.0004 -0.0145 -4.2538-2.06960.0315 0.0059 0.0125 -0.0019 -0.0152 -4.4419 -1.90790.0320 0.0058 0.0122 -0.0035 -0.0158 -4.5473 -1.63520.0325 0.0058 0.0119-0.0051 -0.0163 -4.5411 -1.2273 0.03300.0056 0.0115 -0.0066 -0.0166 -4.3954-0.66610.0335 0.0055 0.0112 -0.0081 -0.0167-4.08890.05510.03400.00530.0109 -0.0095 -0.0166 -3.6129 0.9243 0.03450.0051 0.0105 -0.0106 -0.0161 -2.9781 1.90580.0350 0.0049 0.0102-0.0115 -0.0152-2.2178 2.9395 0.03550.0047 0.0099-0.0122 -0.0140 -1.3857 3.94730.0360 0.0044 0.0097 -0.0125 -0.0125 -0.5478 4.8458图形输出:图2 连杆3的几个位置点图4 角加速度线图图5 角加速度线图。
《有限元基础教程》_【MATLAB算例】3.3.7(2) 三梁平面框架结构的有限元分析(Beam2D2Node)

【MATLAB 算例】3.3.7(2) 三梁平面框架结构的有限元分析(Beam2D2Node)如图3-19所示的框架结构,其顶端受均布力作用,结构中各个截面的参数都为:113.010Pa E =⨯,746.510I m -=⨯,426.810A m -=⨯。
试基于MA TLAB 平台求解该结构的节点位移以及支反力。
图3-19 框架结构受一均布力作用解答:对该问题进行有限元分析的过程如下。
(1) 结构的离散化与编号将该结构离散为3个单元,节点位移及单元编号如图3-20所示,有关节点和单元的信息见表3-5。
(a ) 节点位移及单元编号(b ) 等效在节点上的外力图3-20 单元划分、节点位移及节点上的外载(2) 各个单元的描述首先在MA TLAB 环境下,输入弹性模量E 、横截面积A 、惯性矩I 和长度L ,然后针对单元1,单元2和单元3,分别二次调用函数Beam2D2Node_ElementStiffness ,就可以得到单元的刚度矩阵k1(6×6)和k2(6×6),且单元2和单元3的刚度矩阵相同。
>> E=3E11;>> I=6.5E-7;>> A=6.8E-4;>> L1=1.44;>> L2=0.96;>> k1=Beam2D2Node_Stiffness(E,I,A,L1);>> k2=Beam2D2Node_Stiffness(E,I,A,L2);(3) 建立整体刚度方程将单元2和单元3的刚度矩阵转换成整体坐标下的形式。
由于该结构共有4个节点,则总共的自由度数为12,因此,结构总的刚度矩阵为KK(12×12),对KK 清零,然后两次调用函数Beam2D2Node_Assemble 进行刚度矩阵的组装。
>> T=[0,1,0,0,0,0;-1,0,0,0,0,0;0,0,1,0,0,0;0,0,0,0,1,0;0,0,0,-1,0,0;0,0,0,0,0,1];>> k3=T'*k2*T;>> KK=zeros(12,12);>> KK=Beam2D2Node_Assemble(KK,k1,1,2);>> KK=Beam2D2Node_Assemble(KK,k3,3,1);>> KK=Beam2D2Node_Assemble(KK,k3,4,2)KK = 1.0e+008 *1.4431 0 0.0127 -1.4167 0 0 -0.0264 0 0.0127 0 0 0 02.1328 0.0056 0 -0.0078 0.0056 0 -2.1250 0 0 0 0 0.0127 0.0056 0.0135 0 -0.0056 0.0027 -0.0127 0 0.0041 0 0 0 -1.4167 0 0 1.4431 0 0.0127 0 0 0 -0.0264 0 0.0127 0 -0.0078 -0.0056 0 2.1328 -0.0056 0 0 0 0 -2.1250 0 0 0.0056 0.0027 0.0127 -0.0056 0.0135 0 0 0 -0.0127 0 0.0041 -0.0264 0 -0.0127 0 0 0 0.0264 0 -0.0127 0 0 0 0 -2.1250 0 0 0 0 0 2.1250 0 0 0 0 0.0127 0 0.0041 0 0 0 -0.0127 0 0.0081 0 0 0 0 0 0 -0.0264 0 -0.0127 0 0 0 0.0264 0 -0.0127 0 0 0 0 -2.1250 0 0 0 0 0 2.1250 0 0 0 0 0.0127 0 0.0041 0 0 0 -0.0127 0 0.0081(4) 边界条件的处理及刚度方程求解该问题的位移边界条件为0444333======θθv u v u 。
运用MATLAB解决四杆机构问题
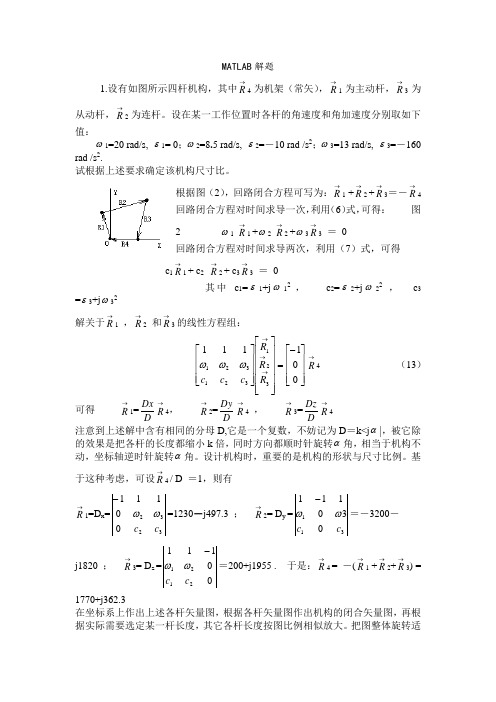
MATLAB 解题1.设有如图所示四杆机构,其中→R 4为机架(常矢),→R1为主动杆,→R3为从动杆,→R 2为连杆。
设在某一工作位置时各杆的角速度和角加速度分别取如下值:ω1=20 rad/s, ε1= 0;ω2=8.5 rad/s, ε2=-10 rad /s 2;ω3=13 rad/s, ε3=-160rad /s 2.试根据上述要求确定该机构尺寸比。
根据图(2),回路闭合方程可写为:→R 1 +→R 2 +→R 3=-→R 4 回路闭合方程对时间求导一次,利用(6)式,可得: 图2 ω1→R 1 +ω2→R 2 +ω3→R 3 = 0回路闭合方程对时间求导两次,利用(7)式,可得c 1→R 1 + c 2 →R 2 + c 3→R 3 = 0其中 c 1=ε1+j ω12 , c 2=ε2+j ω22, c 3=ε3+j ω32解关于→R 1 ,→R 2 和→R 3的线性方程组:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡→→→001111321321321R R R c c c ωωω→R 4 (13) 可得 →R 1=DDx →R 4, →R 2=DDy →R 4 , →R 3=DDz →R 4注意到上述解中含有相同的分母D,它是一个复数,不妨记为D =k<j α|,被它除的效果是把各杆的长度都缩小k 倍,同时方向都顺时针旋转α角,相当于机构不动,坐标轴逆时针旋转α角。
设计机构时,重要的是机构的形状与尺寸比例。
基于这种考虑,可设→R 4 / D =1,则有→R 1=D x =32320111c c ωω-=1230-j497.3 ; →R 2= D y =311030111c c ωω-=-3200-j1820 ; →R 3= D z =001112121c c ωω-=200+j1955 . 于是:→R 4 = -(→R 1 +→R 2+→R 3) = 1770+j362.3在坐标系上作出上述各杆矢量图,根据各杆矢量图作出机构的闭合矢量图,再根据实际需要选定某一杆长度,其它各杆长度按图比例相似放大。
matlab桁架结构有限元计算
matlab桁架结构有限元计算摘要本文介绍了使用M ATL A B进行桁架结构有限元计算的方法。
首先,我们将讨论桁架结构的基本概念和有限元分析的原理。
然后,我们将详细介绍如何使用MA TL AB建立桁架结构的有限元模型,并进行力学分析。
最后,我们将通过一个案例演示如何使用MA TL AB进行桁架结构的有限元计算,以及如何分析结果。
1.引言桁架结构是一种由杆件和节点组成的空间结构。
它具有轻巧、刚性和稳定等特点,在工程领域中得到了广泛应用。
有限元方法是一种常用的工程分析方法,可以用于求解桁架结构的应力、变形等问题。
MA T LA B是一个功能强大的计算软件,具有丰富的工具箱和便于使用的界面,可以用于桁架结构的有限元分析。
2.桁架结构的基本概念桁架结构由若干杆件和节点组成,杆件可以看作是刚性杆,节点是杆件的连接点。
桁架结构常用于承受桥梁、建筑物等结构的荷载。
桁架结构的节点可以是固定支撑、铰支撑或滑动支撑等。
杆件可以是直杆、曲杆或弯曲杆等。
桁架结构的力学行为可以通过有限元方法进行分析。
3.有限元分析的原理有限元分析是一种将复杂结构离散化为单元,通过对单元的力学计算得到整体结构的力学行为的方法。
有限元分析的基本步骤包括离散化、建立单元模型、求解节点位移和计算单元力等。
在桁架结构的有限元分析中,常用的单元类型有一维梁单元和杆单元。
4.使用MAT LAB进行桁架结构有限元分析使用MA TL AB进行桁架结构有限元分析的步骤如下:4.1建立有限元模型首先,需要根据实际情况确定桁架结构的几何尺寸和材料属性,然后使用MA TL AB的有限元建模工具箱创建桁架结构的有限元模型。
模型的建立包括定义节点、杆件和单元,设置边界条件和加载。
4.2求解节点位移和单元力通过求解有限元方程,可以得到桁架结构的节点位移和单元力。
M A TL AB提供了一系列用于求解线性方程组的函数,可以快速得到结果。
4.3分析结果得到节点位移和单元力后,可以进行进一步的分析。
桁架结构的有限元分析MATLAB

桁架结构的有限元分析MATLAB桁架结构是一种由直杆或斜杆连接而成的稳定结构,在工程应用中较为常见。
有限元分析(Finite Element Analysis,FEA)是一种利用数值方法解决结构力学问题的工具。
本文将介绍如何使用MATLAB进行桁架结构的有限元分析,并对其进行1200字以上的详细描述。
在进行桁架结构有限元分析前,需要先进行结构建模以及材料属性和加载条件的定义。
这些定义可以通过MATLAB命令行或者编写MATLAB脚本文件实现。
首先,我们需要定义桁架结构的节点和单元。
节点用于表示桁架结构的连接点,单元用于表示相邻节点之间的连接关系。
可以使用MATLAB中的矩阵表示节点和单元,如下所示:nodes = [x1, y1; x2, y2; ...; xn, yn];elements = [n1, n2; n3, n4; ...; nm, np];```其中,`nodes`是一个n行2列的矩阵,表示n个节点的坐标;`elements`是一个m行2列的矩阵,表示m个单元的节点连接关系。
接下来,我们需要定义材料属性和加载条件。
材料属性包括杨氏模量和截面面积等参数,加载条件包括节点的约束和外部加载。
可以使用MATLAB中的矩阵或者结构体表示材料属性和加载条件,如下所示:materials = struct('E', E1, 'A', A1; 'E', E2, 'A', A2; ...);constraints = [n1, d1x, d1y; ...; nm, dmx, dmy];loads = [n1, F1x, F1y; ...; nl, Flx, Fly];```其中,`materials`是一个结构体数组,每个结构体包含材料的杨氏模量(E)和截面面积(A);`constraints`是一个m行3列的矩阵,表示m个节点的约束,其中d1x和d1y分别表示节点的x方向和y方向位移约束;`loads`是一个l行3列的矩阵,表示l个节点的外部加载,其中F1x和F1y分别表示节点的x方向和y方向外部力。
matlab桁架结构有限元计算
matlab桁架结构有限元计算
在MATLAB中,进行桁架结构的有限元计算可以按照以下步
骤进行:
1. 定义节点和单元:根据实际问题的几何形状和拓扑关系,定义桁架结构的节点和单元。
节点是桁架结构的连接点,单元是连接节点的构件。
2. 定义材料属性和截面属性:根据实际问题的材料和截面要求,定义桁架结构的材料属性和截面属性。
材料属性包括弹性模量和泊松比等,截面属性包括截面面积和惯性矩等。
3. 组装刚度矩阵:根据节点和单元的几何形状和材料属性,计算每个单元的局部刚度矩阵,然后根据单元和节点的连接关系,将局部刚度矩阵组装成整体刚度矩阵。
4. 施加边界条件:根据实际问题的边界条件,将边界节点的位移固定为零,或施加位移或力的约束条件。
5. 求解位移和反力:使用求解线性方程组的方法,求解位移和反力。
可以使用MATLAB中的线性方程组求解函数(如'\''运
算符)来计算。
6. 计算应力和应变:根据位移和节点的几何形状,计算节点上的应变,然后根据材料属性,计算节点上的应力。
以上步骤涵盖了桁架结构的有限元计算的基本流程,具体实现时需要根据实际问题进行适当的调整和扩展。
2D四杆桁架结构的有限元分析实例学习资料
2D四杆桁架结构的有限元分析实例实例:2D四杆桁架结构的有限元分析学习有限元方法的一个最佳途径,就是在充分掌握基本概念的基础上亲自编写有限元分析程序,这就需要一个良好的编程环境或平台。
MATLAB软件就是这样一个平台,它以功能强大、编程逻辑直观、使用方便见长。
将提供有限元分析中主要单元完整的MATLAB程序,并给出详细的说明。
1D杆单元的有限元分析MATLAB程序(Bar1D2Node)最简单的线性杆单元的程序应该包括单元刚度矩阵、单元组装、单元应力等几个基本计算程序。
下面给出编写的线性杆单元的四个MATLAB函数。
Bar1D2Node _Stiffness(E,A,L)该函数计算单元的刚度矩阵,输入弹性模量E,横截面积A和长度L,输出单元刚度矩阵k(2×2)。
Bar1D2Node _Assembly(KK,k,i,j)该函数进行单元刚度矩阵的组装,输入单元刚度矩阵k,单元的节点编号i、j,输出整体刚度矩阵KK。
Bar1D2Node _Stress(k,u,A)该函数计算单元的应力,输入单元刚度矩阵k、单元的位移列阵u(2×1)以及横截面积A计算单元应力矢量,输出单元应力stress。
Bar1D2Node_Force(k,u)收集于网络,如有侵权请联系管理员删除该函数计算单元节点力矢量,输入单元刚度矩阵k和单元的位移列阵u(2×1),输出2×1的单元节点力矢量forces。
基于1D杆单元的有限元分析的基本公式,写出具体实现以上每个函数的MATLAB程序如下。
%%%%%%%%%%% Bar1D2Node %% begin %%%%%%%%%function k=Bar1D2Node_Stiffness(E, A, L)%该函数计算单元的刚度矩阵%输入弹性模量E,横截面积A和长度L%输出单元刚度矩阵k(2×2)%---------------------------------------k=[E*A/L -E*A/L; -E*A/L E*A/L];%%%%%%%%%%%%%%%%%%%%%%%%%%function z=Bar1D2Node_Assembly(KK,k,i,j)%该函数进行单元刚度矩阵的组装%输入单元刚度矩阵k,单元的节点编号i、j%输出整体刚度矩阵KK%-----------------------------------DOF(1)=i;DOF(2)=j;for n1=1:2for n2=1:2收集于网络,如有侵权请联系管理员删除KK(DOF(n1), DOF(n2))= KK(DOF(n1), DOF(n2))+k(n1, n2);endendz=KK;%------------------------------------------------------------function stress=Bar1D2Node_Stress(k, u, A)%该函数计算单元的应力%输入单元刚度矩阵k, 单元的位移列阵u(2×1)%输入横截面积A计算单元应力矢量%输出单元应力stress%-----------------------------------stress=k*u/A;%-----------------------------------------------------------%%%%%%%%%%%%%%%%%%%%%%%%%function forces=Bar1D2Node_Force(k, u)%该函数计算单元节点力矢量%输入单元刚度矩阵k和单元的位移列阵u(2×1)%输出2×1的单元节点力分量forces%-----------------------------------------forces=k*u;%%%%%%%%%%% Bar1D2Node %% end %%%%%%%%%收集于网络,如有侵权请联系管理员删除【四杆桁架结构的有限元分析—数学推导】如图所示的结构,各杆的弹性模量和横截面积都为E=29.54×10N/mm2,A=100mm 2,试求解该结构的节点位移、单元应力以及支反力。
matlab桁架结构有限元计算

matlab桁架结构有限元计算摘要:一、引言二、MATLAB 在桁架结构有限元计算中的应用1.桁架结构的离散化与编号2.组装刚度矩阵3.求解器求解4.后处理三、MATLAB 桁架有限元分析实例1.空间桁架有限元分析2.基于MATLAB 的三维桁架有限元分析3.五杆桁架有限元分析四、用MATLAB 编写程序求解桁架结构内力问题1.静定结构绘制简图2.计算结构力学3.机动分析五、结论正文:一、引言在工程领域中,桁架结构由于其优越的力学性能和简单的结构形式,被广泛应用于桥梁、塔架等大型建筑结构中。
为了确保桁架结构的安全性和稳定性,对其进行有限元分析是非常必要的。
MATLAB 作为一种强大的数学软件,可以方便地进行桁架结构的有限元计算。
本文将介绍如何使用MATLAB 进行桁架结构有限元计算。
二、MATLAB 在桁架结构有限元计算中的应用1.桁架结构的离散化与编号在进行有限元分析之前,首先需要对桁架结构进行离散化处理,将连续的桁架杆件划分为有限个小杆件。
同时,为了方便后续计算,需要对各个杆件和节点进行编号。
2.组装刚度矩阵根据桁架结构的几何参数和材料性能,可以计算出各个杆件的刚度矩阵。
将这些刚度矩阵组装成一个总的刚度矩阵,用于描述整个桁架结构的刚度特性。
3.求解器求解利用MATLAB 的求解器,可以对桁架结构进行有限元求解。
求解器会根据刚度矩阵和施加的边界条件,计算出节点的位移和单元的应力。
4.后处理在求解完成后,需要对计算结果进行后处理。
这包括对计算结果的保存、可视化以及结果的验证等。
三、MATLAB 桁架有限元分析实例1.空间桁架有限元分析例如,可以针对一个空间桁架结构,使用MATLAB 进行有限元分析。
假设该桁架结构由铝制成的垂直和水平部分和钢制成的对角桁架构件组成。
结构承受荷载P,需要计算节点位移、单元应力以及支反力。
2.基于MATLAB 的三维桁架有限元分析还可以利用MATLAB 进行三维桁架有限元分析。
matlab4节点杆单元计算
篇下载MATLAB4节点杆单元计算在工程结构分析领域中,节点杆单元是一种常用的有限元分析方法。
它通过将结构划分成多个小单元,然后对每个小单元进行力学分析,最终得出整个结构的受力情况。
MATLAB作为一种强大的工程计算工具,被广泛应用于结构分析中。
本文将介绍如何利用MATLAB进行4节点杆单元计算,并提供相应的代码实例。
1. 理论背景在进行4节点杆单元计算之前,首先需要了解节点杆单元的基本理论。
节点杆单元是将结构划分为多个杆件,并在每个节点处考虑位移和受力。
通过分析每个杆件的受力平衡和位移关系,可以得出整个结构的受力和变形情况。
4节点杆单元是其中的一种常用的单元类型,它由4个节点和2个杆件组成,可以用来模拟各种不同形状和受力情况的结构。
2. MATLAB实现在MATLAB中,可以利用有限元分析工具箱进行4节点杆单元计算。
首先需要定义结构的几何形状和材料性质,并将其转化为有限元模型。
然后可以利用有限元分析工具箱提供的函数进行网格划分和边界条件设置。
接下来可以利用求解器进行结构的力学分析,并得出节点的位移和受力情况。
最后可以利用MATLAB的绘图工具对结果进行可视化展示。
3. 代码实例下面是一个简单的MATLAB代码实例,演示了如何利用有限元分析工具箱进行4节点杆单元计算:```matlab定义结构的几何形状和材料性质L = 1; 结构的长度A = 1; 结构的横截面积E = 1; 结构的弹性模量定义节点坐标node = [0, 0; 0, L; L, L; L, 0];定义单元节点关系element = [1, 2; 2, 3; 3, 4; 4, 1];网格划分和边界条件设置model = createpde();geometryFromEdges(model,(p)struct('p',p','e',[]),(p)ones(size(p,2 ),1));generateMesh(model);结构的力学分析structuralProperties(model,'YoungsModulus',E,'PoissonsRatio',0); structuralBC(model,'Edge',1,'Constraint','fixed');节点的位移和受力情况result = solve(model);可视化展示pdeplot(model,'XYData',result.displacement,'Deformation','on'); ```4. 结论通过以上代码实例,可以看到利用MATLAB进行4节点杆单元计算是非常简单和高效的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
【MATLAB 算例】3.2.5(2) 四杆桁架结构的有限元分析(Bar2D2Node)如图3-8所示的结构,各个杆的弹性模量和横截面积都为4229.510/E N mm =⨯, 2100A mm =。
试基于MATLAB 平台求解该结构的节点位移、单元应力以及支反力。
图3-8 四杆桁架结构解答:对该问题进行有限元分析的过程如下。
(1) 结构的离散化与编号对该结构进行自然离散,节点编号和单元编号如图3-8所示,有关节点和单元的信息见表3-1~表3-3。
(2)计算各单元的刚度矩阵(基于国际标准单位)建立一个工作目录,将所编制的用于平面桁架单元分析的4个MA TLAB 函数放置于该工作目录中,分别以各自函数的名称给出文件名,即:Bar2D2Node_Stiffness ,Bar2D2Node_Assembly ,Bar2D2Node_Stress ,Bar2D2Node_Forces 。
然后启动MATLAB ,将工作目录设置到已建立的目录中,在MATLAB 环境中,输入弹性模量E 、横截面积A ,各点坐标x1,y1,x2,y2,x3,y3,x4,y4,角度alpha 1, alpha 2和alpha 3,然后分别针对单元1,2,3和4,调用4次Bar2D2Node_Stiffness ,就可以得到单元的刚度矩阵。
相关的计算流程如下。
>>E=2.95e11;>>A=0.0001;>>x1=0;>>y1=0;>>x2=0.4;>>y2=0;>>x3=0.4;>>y3=0.3;>>x4=0;>>y4=0.3;>> alpha1=0;>> alpha2=90;>> alpha3=atan(0.75)*180/pi;>> k1=Bar2D2Node_Stiffness (E,A,x1,y1,x2,y2,alpha1)k1 = 73750000 0 -73750000 00 0 0 0-73750000 0 73750000 00 0 0 0>> k2=Bar2D2Node_Stiffness (E,A,x2,y2,x3,y3,alpha2)k2 = 1.0e+007 *0.0000 0.0000 -0.0000 -0.00000.0000 9.8333 -0.0000 -9.8333-0.0000 -0.0000 0.0000 0.0000-0.0000 -9.8333 0.0000 9.8333>> k3=Bar2D2Node_Stiffness (E,A,x1,y1,x3,y3,alpha3)k3 = 1.0e+007 *3.7760 2.8320 -3.7760 -2.83202.8320 2.1240 -2.8320 -2.1240-3.7760 -2.8320 3.7760 2.8320-2.8320 -2.1240 2.8320 2.1240>> k4=Bar2D2Node_Stiffness (E,A,x4,y4,x3,y3,alpha1)k4 = 73750000 0 -73750000 00 0 0 0-73750000 0 73750000 00 0 0 0(3) 建立整体刚度方程由于该结构共有4个节点,因此,设置结构总的刚度矩阵为KK (8×8),先对KK 清零,然后四次调用函数Bar2D2Node _Assembly 进行刚度矩阵的组装。
相关的计算流程如下。
>>KK=zeros(8,8);>>KK=Bar2D2Node_Assembly (KK,k1,1,2);>>KK=Bar2D2Node_Assembly (KK,k2,2,3);>>KK=Bar2D2Node_Assembly (KK,k3,1,3);>>KK=Bar2D2Node_Assembly (KK,k4,4,3)KK= 1.0e+008 *1.1151 0.2832 -0.7375 0 -0.3776 -0.2832 0 00.2832 0.2124 0 0 -0.2832 -0.2124 0 0-0.7375 0 0.7375 0.0000 -0.0000 -0.0000 0 00 0 0.0000 0.9833 -0.0000 -0.9833 0 0-0.3776 -0.2832 -0.0000 -0.0000 1.1151 0.2832 -0.7375 0-0.2832 -0.2124 -0.0000 -0.9833 0.2832 1.1957 0 00 0 0 0 -0.7375 0 0.7375 00 0 0 0 0 0 0 0(4) 边界条件的处理及刚度方程求解由图3-8可以看出,节点1的位移将为零,即10u =, 10v =,节点2的位移20v =,节点4的40u =,40v =。
节点载荷3F =10N 。
采用高斯消去法进行求解,注意:MATLAB 中的反斜线符号“\”就是采用高斯消去法。
该结构的节点位移为:[]T v u v u v u v u 44332211=q 而节点力为:[]T y x y y x R R R R R 4442411105.20102⨯-⨯=+=F R P 其中,11(,)x y R R 为节点1处沿x 和y 方向的支反力,2y R 为节点2处y 方向的支反力,44(,)x y R R 为节点4处沿x 和y 方向的支反力。
相关的计算流程如下。
>>k=KK([3,5,6],[3,5,6])k =1.0e+008 *0.7375 -0.0000 -0.0000-0.0000 1.1151 0.2832-0.0000 0.2832 1.1957>> p=[20000;0;-25000];>>u=k\pu = 1.0e-003 *0.2712 0.0565 -0.2225 [这里将列排成了一行,以节省篇幅] 由此可以看出,所求得的结果2330.271 2,0.056 5,0.222 5u mm u mm v mm ===-,则所有节点位移为[]000.271 200.056 50.222 500Tmm =-q (3-75)与前面通过数学推导得到的结果相同,见式(3-72)。
(5)支反力的计算在得到整个结构的节点位移后,由原整体刚度方程就可以计算出对应的支反力。
将整体的位移列阵q (采用国际单位)代回原整体刚度方程,计算出所有的节点力P ,按上面的对应关系就可以找到对应的支反力。
相关的计算流程如下。
>> q=[0 0 0.0002712 0 0.0000565 -0.0002225 0 0]'q = 1.0e-003 *0 0 0.2712 0 0.0565 -0.2225 0 0 [这里将列排成了一行,以节省篇幅] >>P=KK*qP = 1.0e+004 *-1.5833 0.3126 2.0001 2.1879 -0.0001 -2.5005 -0.4167 0 [这里将列排成了行]按对应关系,可以得到对应的支反力为(3-76)(6)各单元的应力计算先从整体位移列阵q 中提取出单元的位移列阵,然后,调用计算单元应力的函数Bar2D2Node_ElementStress ,就可以得到各个单元的应力分量。
当然也可以调用上面的Bar2D2Node_ElementForces(E,A,x1,y1,x2,y2,alpha,u)函数来计算单元的集中力,然后除以面积求得单元应力。
相关的计算流程如下。
>>u1=[q(1);q(2);q(3);q(4)]u1 = 1.0e-003 *0 0 0.2712 0 [这里将列排成了一行,以节省篇幅] >> stress1=Bar2D2Node_Stress(E,x1,y1,x2,y2,alpha1,u1)stress1 =2.0001e+008>>u2=[q(3);q(4);q(5);q(6)]u2 = 1.0e-003 *0.2712 0 0.0565 -0.2225 [这里将列排成了一行,以节省篇幅]>> stress2=Bar2D2Node_Stress(E,x2,y2,x3,y3,alpha2,u2)stress2 = -2.1879e+008>>u3=[q(1);q(2);q(5);q(6)]u3 = 1.0e-003 *0 0 0.0565 -0.2225 [这里将列排成了一行,以节省篇幅] >> stress3=Bar2D2Node_Stress(E,x1,y1,x3,y3,alpha3,u3)stress3 = -52097000>>u4=[q(7);q(8);q(5);q(6)]u4 = 1.0e-003 *0 0 0.0565 -0.2225 [这里将列排成了一行,以节省篇幅] >> stress4=Bar2D2Node_Stress(E,x4,y4,x3,y3,alpha1,u4)stress4 = 41668750可以看出:计算得到的单元1的应力为82.000 110Pa e σ=⨯;单元2的应力为82.187 910Pa σ=-⨯,单元3的应力为75.209 710Pa σ=-⨯,单元4的应力为74.16710Pa σ=⨯。
与前面通过数学推导得到的结果相同,见式(3-73)。