guide-of-robot-relay20111017
开关机器人操作器手册说明书
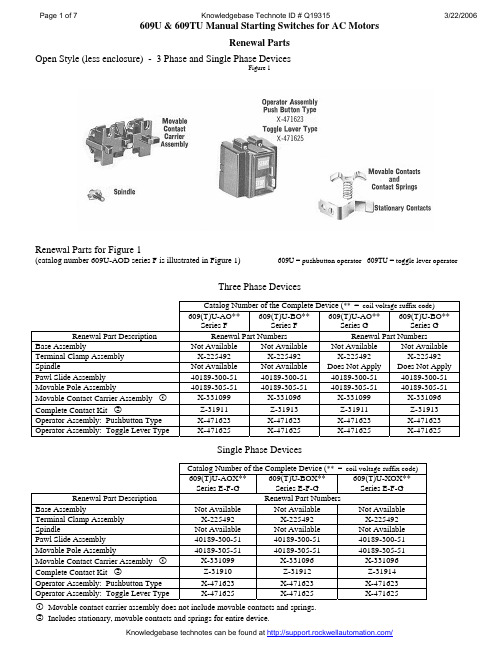
Open Style (less enclosure) - 3 Phase and Single Phase DevicesFigure 1Renewal Parts for Figure 1(catalog number 609U-AOD series F is illustrated in Figure 1) 609U = pushbutton operator 609TU = toggle lever operatorThree Phase DevicesCatalog Number of the Complete Device (** = coil voltage suffix code)609(T)U-AO** Series F 609(T)U-BO** Series F 609(T)U-AO** Series G 609(T)U-BO**Series GRenewal Part Description Renewal Part Numbers Renewal Part NumbersBase Assembly Not Available Not Available Not Available Not AvailableTerminal Clamp Assembly X-225492 X-225492 X-225492 X-225492 Spindle Not Available Not Available Does Not Apply Does Not Apply Pawl Slide Assembly 40189-300-51 40189-300-51 40189-300-51 40189-300-51 Movable Pole Assembly 40189-305-51 40189-305-51 40189-305-51 40189-305-51Movable Contact Carrier Assembly !X-331099 X-331096 X-331099 X-331096 Complete Contact Kit "Z-31911 Z-31913 Z-31911 Z-31913 Operator Assembly: Pushbutton Type X-471623 X-471623 X-471623 X-471623 Operator Assembly: Toggle Lever Type X-471625 X-471625 X-471625 X-471625Single Phase DevicesCatalog Number of the Complete Device (** = coil voltage suffix code)609(T)U-AOX** Series E-F-G 609(T)U-BOX** Series E-F-G 609(T)U-XOX**Series E-F-GRenewal Part Description Renewal Part NumbersBase Assembly Not Available Not Available Not AvailableTerminal Clamp Assembly X-225492 X-225492 X-225492Spindle Not Available Not Available Not AvailablePawl Slide Assembly 40189-300-51 40189-300-51 40189-300-51Movable Pole Assembly 40189-305-51 40189-305-51 40189-305-51Movable Contact Carrier Assembly !X-331099 X-331096 X-331096 Complete Contact Kit "Z-31910 Z-31912 Z-31914 Operator Assembly: Pushbutton Type X-471623 X-471623 X-471623Operator Assembly: Toggle Lever Type X-471625 X-471625 X-471625! Movable contact carrier assembly does not include movable contacts and springs." Includes stationary, movable contacts and springs for entire device.Solenoid (Coil) Assemblies (Includes Mounting Hardware)Cat. No. Coil Suffix Voltage Code Coil Volts - Hz Solenoid (Coil) Renewal Part Number WJ 24V 60 Hz MA-013None 40V 60 Hz MA-219S, XS 110 – 115V 50 Hz MA-322D, XD 115 - 120V 60 Hz MA-236None 127 - 132V 50 Hz MA-328None 152 - 158V 60 Hz MA-289None 166 - 173V 60 Hz MA-245None 174 - 181V 60 Hz MA-246None 192 - 200V 50 Hz MA-337F 201 - 210V 50 Hz MA-338H, XH 200 - 208V 60 Hz MA-249P, XP 220 - 230V 50 Hz MA-339A, XA 230 - 240V 60 Hz MA-254None 252 - 263V 60 Hz MA-257None 317 - 331V 60 Hz MA-263None 364 - 380V 60 Hz MA-267VN 380V 50 Hz MA-354None 384 - 401V 50 Hz MA-355N, WL 415V 50 Hz MA-357None 438 - 459V 60 Hz MA-271Q 440 - 460V 50 Hz MA-360B 460 - 480V 60 Hz MA-273None 481 - 502V 60 Hz MA-274None 527 - 551V 60 Hz MA-276C 550V 50 Hz MA-368C 575 - 600V 60 Hz MA-278Enclosed NEMA Type 1 Bulletin 609U Manual Starting Switches - 3 Phase and Single Phase DevicesEnclosure Only for 609U-AAD (does not include manual starting switch)Renewal Part Number 40189-806-01Manual Starting Switch – 609U-AOD609U = pushbutton operator 609TU = toggle lever operatorCatalog Number of the Complete Device (* = coil voltage suffix code)609U-AA* or 609U-BA* 609TU-AA* or 609TU-BA* 609U-AAX* or 609U-BAX* or 609U-XAX* 609TU-AAX* or 609TU-BAX* or 609TU-XAX*Series F-G Series H Series F-G Series H Renewal Part Description Renewal Part Numbers Renewal Part NumbersEnclosure (base and cover assemblies) 40189-806-01 !40189-806-01 40189-806-01 !40189-806-01 Enclosure Base Only Not Available Not Available Not Available Not Available Enclosure Cover Only Not Available 40189-808-01 Not Available 40189-808-01! This part number is larger than the enclosure used on the original devices.Manual Starting Switches (less enclosure)609U-AOD (609TU devices similar in appearance)Enclosed Switch Cat. No. Renewal Part Number for Manual Switch less Enclosure (* = coil voltage suffix code) 609(T)U-AA* 609(T)U-AO* 609(T)U-AAX* 609(T)U-AOX* 609(T)U-BA* 609(T)U-BO* 609(T)U-BAX* 609(T)U-BOX* 609(T)U-XAX* 609(T)U-XOX*Enclosed NEMA 12 Bulletin 609U Manual Starting Switches - 3 Phase and Single Phase DevicesEnclosure Only for 609U-AJD (does not include manual starting switch) Renewal Part Number 40189-807-01 Cover Pushbutton Assembly Renewal Part Number 40189-062-51Catalog Number of the Complete Device (* = coil voltage suffix code)609U-AJ* or 609U-BJ* 609U-AJX* or 609U-BJX* or 609U-XJX*Series E-H Series J-K Series F-H Series J-K Renewal Part Description Renewal Part Numbers Renewal Part NumbersEnclosure (base and cover assemblies) 40189-807-01 !40189-807-01 40189-807-01 !40189-807-01Enclosure Base Only Not Available Not Available Not Available Not AvailableEnclosure Cover with Cover Pushbuttons Not Available 40189-809-01 Not Available 40189-809-01Cover Pushbutton Assembly Only 40189-062-51 40189-062-51 40189-062-51 40189-062-51! This part number is larger than the enclosure used on the original devices.Manual Starting Switch (less enclosure)Enclosed Switch Cat. No. Renewal Part Number for Manual Switch less Enclosure (* = coil voltage suffix code) 609U-AJ* 609U-AO* 609U-AJX* 609U-AOX* 609U-BJ* 609U-BO* 609U-BJX* 609U-BOX* 609U-XJX* 609U-XOX*Renewal Parts - Enclosed NEMA 4X Bulletin 609U Manual Starting Switches – 3 Phase and Single Phase DevicesEnclosure Only for 609U-ACD (less switch) Renewal Part Number 40189-803-01 Cover Operating MechanismRenewal Part Number 40189-810-01Conduit Hub1490-N9Grounding Adapter1490-N20Catalog Number of the Complete Device (* = coil voltage suffix code)609U-AC* (Sz 0) or609U-BC* (Sz 1)609U-ACX* (Sz 0) or 609U-BCX* (Sz 1)or 609U-XCX* (Sz 1P) Series G-J Series K Series F-H Series JRenewal Part Description Renewal Part Numbers Renewal Part Numbers Enclosure (base and cover assemblies) 40189-802-01 !40189-802-01 40189-802-01 !40189-802-01 Enclosure Base Only Not Available Not Available Not Available Not AvailableEncl. Cover w/ Cover Operating Mech – Sz 0 X-474310 609-ACW-COV Encl. Cover w/ Cover Operating Mech - Sz 1 X-474310 609-BCW-COVX-474310(for sizes 0, 1, 1P)609-ACX-COV(for sizes 0, 1, 1P)Operating Mechanism used in Cover 40189-805-01 40189-803-01 40189-805-01 40189-803-01 Grounding Adapter in Base 1490-N20 1490-N20 1490-N20 1490-N20Conduit Hub in Base 1490-N9 1490-N9 1490-N9 1490-N9! This part number is larger than the enclosure used on the original devices.Manual Starting Switch (less enclosure)609T Manual Switch is illustrated (609TU switch is similar in appearance with addition of solenoid assembly) Enclosed Switch Cat. No. Renewal Part Number for Manual Switch less Enclosure (* = coil voltage suffix code) 609U-AC* 609TU-AO* 609U-ACX* 609TU-AOX* 609U-BC* 609TU-BO* 609U-BCX* 609TU-BOX* 609U-XCX* 609TU-XOX*Renewal Parts -Enclosed NEMA 7&9 and NEMA 3R, 7&9 Bulletin 609U Manual Starting Switches – 3 Phase and Single Phase DevicesEnclosure Only for 609U-AED (less switch) Renewal Part Number X-474312Enclosure Only for 609U-AHD (less switch)Renewal Part Number 40189-800-01Cover Operating MechanismRenewal Part Number 40189-801-01 Catalog Number of the Complete Device (* = coil voltage suffix code) 609U-AE* (Sz 0), 609U-BE*609U-AEX* (Sz 0), 609U-BEX* (Sz 1)609U-AH* (Sz 0), 609U-BH* (Sz 1),609U-AHX* (Sz 0), 609U-BHX* (Sz 1) Series F-H Series ARenewal Part Description Renewal Part Numbers Renewal Part Numbers Enclosure (base and cover assemblies) X-474312 40189-800-01 ! Enclosure Base Only Not Available Not AvailableEnclosure Cover with Cover Operating Mechanism 609-AEW-COV (for Sz 0)609-BEW-COV (for Sz 1)609-BHW-COV(for Size 0 and for size 1 devices)Operating Mechanism used in Cover 40189-804-01 40189-801-01! Does not include drain. Order separately as 1401-N2.Manual Starting Switch (less enclosure)609T Manual Switch is illustrated (609TU switch is similar in appearance with addition of solenoid assembly) Enclosed Switch Cat. No. Renewal Part Number for Manual Switch less Enclosure (* = coil voltage suffix code) 609U-AE* 609TU-AO* 609U-AH* 609TU-AO* 609U-BE* 609TU-BO* 609U-BH* 609TU-BO* 609U-AEX* 609TU-AOX* 609U-AHX* 609TU-AOX* 609U-BEX* 609TU-BOX* 609U-BHX* 609TU-BOX*Important User Information Because of the variety of uses for the products described in this publication, those responsible forthe application and use of this control equipment must satisfy themselves that all necessary stepshave been taken to assure that each application and use meets all performance and safetyrequirements, including any applicable laws, regulations, codes and standards.The illustrations, charts, sample programs and layout examples shown in this guide are intendedsolely for purposes of example. Since there are many variables and requirements associated with anyparticular installation, Rockwell Automation does not assume responsibility or liability (to includeintellectual property liability) for actual use based upon the examples shown in this publication.Allen-Bradley publication SGI-1.1, Safety Guidelines for the Application, Installation and Maintenance ofSolid-State Control (available from your local Allen-Bradley office), describes some importantdifferences between solid-state equipment and electromechanical devices that should be taken intoconsideration when applying products such as those described in this publication.Reproduction of the contents of this copyrighted publication, in whole or part, without writtenpermission of Rockwell Automation, is prohibited.Throughout this document we use notes to make you aware of safety considerations:Identifies information about practices or circumstances that can lead topersonal injury or death, property damage or economic lossIdentifies information that is critical for successful application andunderstanding of the product.Use only replacement parts and devices recommended by Rockwell Automation to maintain theintegrity of the equipment. It is the user’s responsibility to ensure that the renewal part numberselected is properly matched to the model, series and revision level of the equipment being serviced.Servicing energized Industrial Control Equipment can be hazardous.Severe injury or death can result from electrical shock, burn, orunintended actuation of controlled equipment. Recommended practiceis to disconnect and lockout control equipment from power sources,and release stored energy, if present.Refer to National Fire Protection Association Standard No. NFPA70E, Part 2 and (asapplicable) OSHA rules for Control of Hazardous Energy Sources (Lockout/Tagout) andOSHA Electrical Safety Related Work Practices for safety related work practices, includingprocedural requirements for lockout/tagout, and appropriate work practices, personnelqualifications and training requirements where it is not feasible to de-energize and lockout or tagoutelectric circuits and equipment before working on or near exposed circuit parts.ROCKWELL DISCLAIMS ALL WARRANTIES WHETHER EXPRESSED OR IMPLIED INRESPECT TO THE INFORMATION (INCLUDING SOFTWARE) PROVIDED HEREBY,INCLUDING THE IMPLIED WARRANTIES OF FITNESS FOR A PARTICULAR PURPOSE,MERCHANTABILITY, AND NON-INFRINGEMENT. Note that certain jurisdictions do notcountenance the exclusion of implied warranties; thus, this disclaimer may not apply to you.Allen-Bradley is a trademark of Rockwell Automation。
R系列机器人说明资料

R系列的特长
1.充实的产品系列 2.动作性能高
3.工作范围大
4.结构紧凑的手臂
5.环境适应性高
6.充分的扩展性 7.维护简单
Kawasaki Robot Kawasaki Robot Kawasaki Robot Kawasaki Robot Kawasaki Robot Kawasaki Robot
RS30N 30 2,100 ±180 +140 ~ -105 +135 ~ -155 ±360 ±145 ±360 180 180 185 260 260 360 13,400 210 210 130 16.8 16.8 6.6 ±0.07mm 555
JT1 JT2 JT3 JT4 JT5 JT6 最大速度 JT1 [°/s] JT2 JT3 JT4 JT5 JT6 合成轴最大速度 [mm/s] 许用负载 JT4 转矩 JT5 [N・m] JT6 许用负载 JT4 惯性转矩 JT5 2 JT6 [kg・m ] 位置往复精度 [mm] 本体质量 [kg]
Kawasaki Robot Kawasaki Robot Kawasaki Robot Kawasaki Robot Kawasaki Robot Kawasaki Robot
中小型机器人
R系列
2009年11月 川崎重工业株式会社
Kawasaki Robot Kawasaki Robot Kawasaki Robot Kawasaki Robot Kawasaki Robot Kawasaki Robot
R系列的特长
速度快! 动作性能高
小! 紧凑流畅 的结构
便于使用! 充分的扩展性 维护简单!
范围大! 工作范围大
强! 环境适应性高
Focusrite 产品指南(夏季2011)说明书

Products guideSUMMER 2011of satisfied customers. Phil Dudderidge/rednetnewsletterDUNK - BASED ON THE MANLEy SLAM! TRANSFORMER / VALVE MIC-PRE NEW AGE 1 - BASED ON THE MILLENIA HV-3D 8 CHANNEL MIC-PRE OLD TUBE - BASED ON THE PULTEC MB-1 FIXED GAIN VALVE MIC-PRE DEUTSCH 72 - BASED ON THE TELEFUNKEN V72 VALVE MIC-PRESTELLAR 1B - BASED ON THE UNIVERSAL AUDIO M610 MONO TUBE MIC-PREFEATURED EMULATIONS:RED 1 H - BASED ON THE FOCUSRITE RED 1 QUAD CLASS A MIC-PRE CLASS A 2A - BASED ON THE NEVE 1073 MONO MIC-PRE TRANY H - BASED ON THE API 3124+ DISCRETE QUAD MIC-PRE SILVER 2 - BASED ON THE AVALON VT-737SP VALVE CHANNEL STRIP SAVILLEROW - BASED ON THE HELIOS CONSOLE MIC-PRE / EQ MODULE7IMPORTANT INFORMATION: FOCUSRITE, the FF logo, LIQUID TECHNOLOGY and the LIQUID logo, and SAFFIRE are trademarks of Focusrite Audio Engineering Limited. DYNAMIC CONVOLUTION is a trade mark of Sintefex Ltd. All other product names, trade marks, or trade names are the names of their respective owners, which are in no way associated, connected nor affiliated with Focusrite or its LIQUID SAFFIRE 56 product and which have not endorsed Focusrite’s LIQUID SAFFIRE 56 product. These other product names, trade marks, and trade names are used solely to identify and describe the third party products the sonic behaviour of which was studied for the LIQUID SAFFIRE 56 product, and to accurately describe the functionality of the LIQUID SAFFIRE 56 product. The LIQUID SAFFIRE 56 product is an independently engineered technology which utilises the patented process of Dynamic Convolution to actually measure examples of the sonic impact of original analogue products upon an audio stream, so as to electronically emulate the performance of the original product studied. The result of this process is subjective and may not be perceived by a user as producing the same effects as the original products studied.What is VRM?Convenient though headphones may be, they’re simply not the same as listening on a pair of monitor loudspeakers. And yet… listening on one pair of monitor speakers isn’t enough either. To tell how your music will sound in the real world, you need to listen in different environments, with different speakers. Until now, you had to burn a CD or transfer a file and play it back on real systems in actual environments to A/B your mixes in different places. But now, there’s a better way.VIRTUAL REFERENCE MONITORINgThe answer is Focusrite’s unique and well-established VRM™ (Virtual Reference Monitoring) technology – a room and loudspeaker simulation system for headphone monitoring. While listening on conventional monitoring headphones, VRM lets you select your listeningenvironment – pro studio, bedroom studio or living room – and choose from an extensive list of industry-standard studio monitors and loudspeaker systems to listen on.VRM’s extensive selection of built-in loudspeakers and listening environments is based on precise mathematical models derived from convolutions of actual impulse responses measured using the original loudspeakers. The use of mathematical modelling provides maximum flexibility of combinations of loudspeakers and listening environments for the highest possible accuracy of the virtual monitoring simulation.VRM allows you to choose between 10 pairs of industry-standard nearfield monitors in an acoustically-treated control room. In addition, two extra rooms are provided – a large living room and a smaller bedroom – where you can choose between speakers such as quality hi-fi, computer, cheap stereo and TV speakers.VRM GUI featured on the Saffire 24 DSP (part of Saffire MixControl)VRM gUI featured on the VRM BoxCHOOSE FROM 15 INDUSTRy-STANDARD STUDIO MONITORS AND SPEAKERS12Saffire/Scarlett MixControlUnmatched sonic quality at an MixControl software is a powerful ultra-low-latency monitoring package that enables youto create several independent mixes and send each of them out to any interface output. Eachmix can be built up using a combination of input signals and DAW outputs. Intuitive one-clickconfigurations help you track, monitor and mix as quickly as possible.The software window comprises of four main sections: a mixer, a router, a monitor sectionand a device status section:• The mixer section allows you to create independent mixes - each of which can be routed outto physical outputs for monitoring, headphone cues or external processing.• The router section is used to send any combination of physical inputs, DAW outputs or user-created mixes of these streams to any outputs.• The monitor section provides control of Volume, Dim, Mute and independent left or right cut.• The device set-up section shows the status of synchronisation and connection, as well asallowing the user to change the sample rate and the synchronisation source for clocking.MixControl gUISaffire MixControl utilises a unique tab system for mixes, allowing you to sendwhatever you want, wherever you want!Fully-featured mix window with clear input and output meteringMultiple independent mixes can be created, each accessible via their own tabSolos, mutes, pans and PFL’s available on every channelMixer output channels can be routed to any number of outputsRouting section provides a clear indication of all audio routingMonitor section lets you switch between different monitoring set-ups quicklyClear device status section shows sample rate, sync source and more11223344556677The image above is for representation purposes. The configuration of MixControl changes depending on the interface in use.SHIPS FREE WITHEVERY SCARLETTINTERFACE17FOCUSRITE ARTISTSMIXMIX。
大学课程中英对照 三

大学课程中英对照三J开头的课程机床Machine Tool机床电路Machine Tool Circuit机床电气Machine Tools Electric机床电气控制Electrical Control of Machinery Tools机床电器Machine Tool Electric Appliance机床动力学Machine Tool Dynamics机床设计Machine Tool design机床数字控制Digital Control of Machine Tool机床液压传动Machinery Tool Hydraulic Transmission机床自动化Machinery Tool Automation机电产品Mechanical&Electrical Products 机电传动Mechanical&Electrical Transmission机电传动控制Mechanical&electrical Transmission Control机电耦合系统Mechanical&Electrical Combination System机电系统计算机仿真Computer Simulation of Mechanic/Electrical Systems机电一体化Mechanical&Electrical Integration机构学Structuring机类专业课程设计Course Design of Machinery机器人Robot机器人导论Introduction of Robot机器人技术基础Fundamentals of Robot Techniques机器人控制技术Robot Control Technology机械产品及管理Mechanic Products&Management机械产品学Mechanic Products机械产品造型设计Shape Design of Mechanical Products机械工程测试技术Measurement Techniques of Mechanic Engineering机械工程计算机控制Mechanic Engineering Computer Control机械工程控制基础Basic Mechanic Engineering Control机械工业企业管理Mechanic Industrial Enterprise Management机械加工自动化Automation in Mechanical Working机械加工自动化系统Automatic System in Mechanical Working机械可靠性Mechanical Reliability机械控制工程Mechanical Control Engineering机械零件Mechanical Elements机械零件课程设计Course Design of Machinery Elements机械零件设计Course Exercise in Machinery Elements Design机械零件设计基础Basis of Machinery Elements Design机械设计Mechanical Designing机械设计基础Basis of Mechanical Designing机械设计课程设计Course Exercise in Mechanical Design机械设计原理Principle of Mechanical Designing机械式传输信息机构Mechanic Information Transmission Device机械式信息传输机构Mechanical Information Transmission Device机械原理Principle ofMechanics机械原理和机械零件Mechanism&Machinery机械原理及机械设计Mechanical Designing机械原理及应用Mechanical Principle&Mechanical Applications机械原理课程设计Course Exercise of Mechanical Principle 机械原理与机械零件Mechanical Principle and Mechanical Elements机械原理与机械设计Mechanical Principle and Mechanical Design机械噪声控制Control of Mechanical Noise机械制图Mechanical Graphing机械制造概论Introduction to Mechanical Manufacture机械制造工艺学Technology of Mechanical Manufacture机械制造基础Fundamental of Mechanical Manufacture机械制造基础(金属工艺学)Fundamental Course of Mechanic Manufacturing(Meta机械制造系统Mechanical Manufacture System机械制造系统自动化Automation of Mechanical Manufacture System机械制造中计算机控制Computer Control in Mechanical Manufacture机制工艺及夹具Mechanical Technology and Clamps机制工艺学Mechanical Technology积分变换Integral Transformation积分变换及数理方程Integral Transformation&Mathematical Equations积分变换控制工程Integral Transformation Control Engineering积分变换与动力工程Integral Transforms&Dynamic Engineering基本电路分析Basis Theory of Circuitry Analysis基本电路理论Basis Theory of Circuit基础代数Fundamental Algebra基础工程计算与分析Calculation and Analysis of Founda tion Engineering基础会计Basic Accountancy基础写作Fundamental Course of Composition基因工程技术Technique for Gene Engineering基因工程药物学Pharmacology of Gene Engineering基因工程原理Principles of Gene Engineering基因诊断Gene Diagnosis基因治疗Ge ne Therapy基因组学Genomics畸形学Teratology激波理论The Theory of Shock Waves激光电源Laser Power Devices激光光谱Laser Spectroscopy激光光谱分析Laser Spectroscopy Analysis激光焊Laser Welding激光化学Laser Chemistry激光基础Basis of Laser激光技术Laser Technology激光加工Laser Processing激光器件Laser Devices激光器件与电源Laser Devices&Power Source激光器件原理与设计Principles of Laser Devices&Design激光生物医学Laser Biomedicine激光实验Laser Experiments激光医学临床实践Clinical Practice for Laser Medicine激光与材料相互作用Reciprocity of Laser&Materials激光与近代光学Laser and Contemporary Optics激光原理Principles of Laser激光原理与技术Laser Principles&Technology极限分析Limit Analysis集成电路CAD Integrate Circuit CAD集成电路CAD设计Design of Integrate Circuit CAD集成电路材料和系统电子学Material and System Electronics for Integrated Circuits集成电路课程设计Course Design of Integrate Circuit集成电路原理与设计Principles&Design of Integrate Circuit集成光学Integrated Optics集合论与代数结构Set Theory&Algebraical Structure计量经济学Measure Economics计算方法Computational Method计算方法Computing Metho d计算方法与算法语言Computational Method&Algorithmic Language计算机导论Introduction to Computers计算机导论与实践Introduction to Computers&Practice计算机仿真Computer Simulation计算机仿真Computer Simulation计算机分析Computer Analysis计算机辅助热力学Computer Aided Thermodynamics计算机辅助设计CAD计算机辅助设计与仿真Computer Aided Design&Imitation计算机辅助语言教学Computer-Aided Language Teaching计算机辅助制造Computer-Aided Manufacturing计算机概论Introduction to Computers计算机概论与上机操作Introduction to Computers&Practise计算机汇编语言Computer Assembly Language计算机绘图Computer Graphics计算机基础Basis of Computer Engineering,Computer Basis计算机技术研究新进展Advances in Computer Technology计算机接口技术Computer Interface Technology计算机接口与通讯Computer Interface&Communication计算机局域网Regional Network of Computers计算机科学研究新进展Advances in Computer Science计算机科学中的逻辑学Logic in Computer Science计算机控制Computer Control,Computer Controlling计算机控制技术Computer Controlling Technology计算机控制系统Computer Control System计算机逻辑设计Computer Logic Designing计算机模拟Computer Imitation计算机软件基础Basis of Software of Computer计算机设计自动化Automation of Computer Design计算机实践Computer Practice计算机实践基础Basis of Computer Practice计算机视觉Computer Vision计算机数据安全Computer Data Security计算机数据库Computer Database计算机算法基础Basis of Computer Algorithm计算机通讯网Computer Communication Network计算机图形显示Computer Graphic Demonstration计算机图形学Computer Graphics 计算机外部设备Computer Peripheral Equipment计算机网络ComputerNetworks计算机网络实验Computer Network Experiment计算机网络新技术Modern Computer Network Technologies计算机维修技术Computer Repair Technique计算机文字处理Computer Language Processing计算机系统结构Computer Architecture计算机系统维修Computer System Maintain计算机信息保密与安全Secrecy and Security of Computer Information计算机应用技术Computer Applications Technology计算机语言处理Computer Language Processing计算机原理Principle of Computer Engineering计算机原理及应用Principle&Applications of Computer计算机原理与BASIC语言Principle of Computer Engineering&BASIC Language计算机原理与算法语言Principles of Computer&Algorithm计算机在分析化学的应用Computer Application in Analyt ical Chemistry计算机在化学中的应用Application of Computer in Chemistry计算机组成原理Principles of Computer Composition计算机组成原理课程设计Principles of Computer Composition Course Design计算力学Computational Mechanics计算力学基础Basis of Computational Mechanics 计算流体Fluid Computation计算流体力学Fluid Mechanics Computation计算微电子学Computational Microelectronics计算物理基础Basics of Computational Physics计算物理谱方法Spectral Method in Computational Physics计算物理学Computational Physics技术管理Technological Management技术经济Technological Economy技术经济学Technological Economics技术贸易Technology Trade技术市场学Technological Marketing 继电保护Relay Protection继电保护新技术New Technology of Relay Protection继电保护原理Principles of Relay Protection继电保护运行Relay-Protected Operation寄生物学Parasutology价格学Price Theory减振设计Vibration Absorption Designing检测技术Measurement Technique检测系统动力学Detection System Dynamics检测与控制Detection&Controling 检测与显示技术Detection&Display Technique简明社会学Concise Sociology简明世界史Brief World History建筑材料Building Material s建筑初步Elementary Architecture建筑防火Building Fire Protection建筑概论Introduction to Architecture建筑工程概论Introduction to Architecture Engineering建筑工程概预算Construction Project Budget建筑构造Architectural Construction建筑绘画Architectural Drawing建筑结构Architectural Structure建筑结构抗震设计Anti-quake ArchitecturalStructure Design建筑结构试验Architectural Structure Experimentation 建筑经济与企业管理Architectural Economy&Enterprise Management建筑力学Architectural Mechanics建筑名作欣赏Appreciation of Architectural Works建筑入门Elementary Architecture建筑设备Architectural Equipment 建筑设计Architectural Design建筑摄影Architectural Photographing建筑施工Construction Technology建筑识图Architectural Recognition Graph建筑物理Architecural Physics建筑制图Architectural Graphing舰船辅助机械Marine Auxiliary Equipment渐近方法Asymptotical Method交换代数Commutative Algebra交流调速系统Alternating Current Governor System胶体化学Colloid Chemistry教学实习Teaching Practice教育心理学Pedagogic Psychology接口与控制器Interface and Controler接口与通讯Interface and Communication接口与通讯课程设计Course Design of Interface and Communication节目制作Programming节目主持人概论Introduction to Compeers结构程序设计Structural Program Designing结构动力学Structural Dynamics结构化学Structural Chemistry结构检验Structural Testing结构力学Structural Mechanics结构素描Structure Sketching结构塑性分析Structural Plasticity Analysis结构稳定Stability Analysis of Structures结构先进技术Advanced Structuring Technology结构优化理论Optimal Structure Theory结构优化设计Optimal Structure Designing结构与强度Structure&Intensity解剖学Anatomy解析几何Analytic Geometry介质波导Medium Wave Guide介质测量Medium Measurement介质光学Medium Optics金工实习Metalworking Practice金融法Financial Law金融工程Finance Project金融市场概论Introduction to Money Market金融市场学Financial Marketing金融与证券市场研究Security Market Research金相分析Metallographic Analysis金相技术Metallographic Techniques金属X射线学Metal X-Ray Analysis金属材料焊接Metal Material Welding金属材料学Metal Material Science金属材料与热处理Metal Material&Heat Treatment金属腐蚀与保护MetalErosion&Protection金属腐蚀与应用Metal Erosion&Application金属腐蚀原理Principles of Metal Erosion金属工艺及设计Metal Technics&Design金属工艺学Metal Technics金属焊接性基础Elementary Metal Weldability金属焊接原理Principles of Metal Welding金属机械性能MechanicalProperty of Metal金属力学性能Metal Mechanic Property金属切削机床Metal Cutting Machine Tool金属切削原理及刀具Principles of Metal Cutting&Cutters金属熔焊原理Principles of Metal Molten Welding金属熔焊原理及工艺Principles of Metal Molten Welding&Technique金属熔炼Metal Melting金属塑性成形原理Principles of Metal Forming金属物理性能Physical Property of Metal金属学Metallography金属学与热处理Metallography&Heat Treatment金属学原理Principles of Metallography近代光学测试技术Modern Optical Testing Technology近代光学计量技术Modern Optical Measuring Technology近代经济史Modern History of Economics近代日本文学史文学作品选读Contemporary Literature History of Japan近代物理实验Contemporary Physics Experiments近世代数Modern Algebra进出口实务Importation&Exportation Affairs进化生物学Evolutionary Biology经济地理Economical Geography经济法Law of Economy经济法概论Introduction of Economy Law经济法学Law of Economy 经济分析基础Basis of Economic Analysis经济基础Basis of Economy经济计量学Economic Metrology经济计量学Economics Metrology经济控制论Economical Cybernetics经济社会学Economic Sociology经济新闻Economic News经济学概论Introduction of Economics经济学说史History of Economics经济学原理Principles of Economics经济预测Economic Predicting经济预测与管理奖惩Economic Predicting&Management经济原理Principles of Economy经济运筹学Economic Operation Research经济增长理论Theory of Economic Growth经营管理Operation Management经营管理学Operation Management晶体工程基础Crystal Engineering晶体管原理Principles of Transistors晶体光学Crystallographic Optics精读Perusal 精密测量技术Technology of Precision Measurement精密电磁测量Precise Electromagnetic Measurement精密电气测量Precise Electric Measurement 精密合金Precise Alloy精密机械CAD CAD for Precision Machinery精密机械课程设计Course Design for Precision Machinery精密机械零件Precision Machinery Elements精密机械零件与机构Precision Machinery Elements&Mechanism精密机械设计基础Elementary Precision Machinery Design精密机械学Precision Machinery精密机械学课程设计Course Design of Precision Machinery精神病护理学Psychiatric Nursing精细化工装备Refinery Chemical Equipment精细有机合成Minute Organic Synthesis静力学Statics纠错编码Error Correction of Coding矩阵分析Matrix Analysis 决策分析Analysis of Policy Making决策支持系统与专家系统Decision Support Systems and Expert Systems绝缘在线检测Insulation Live Testing军事理论Military Theory K开头的课程开花的艺术Art of Flowering康复护理学Rehabilitation Nursing康复咨询学Rehabilitation Counseling抗干扰技术Anti-Jamming Technique科技翻译Scientific English Translation科技管理Technological Management科技史History of Science&Technology科技史及新技术知识Historry of Science&Knowledge of New Techndogy科技写作Scientific Writing科技新闻Scientific News科技英语Scientific English科技英语基础Elementary Scientific English科技英语阅读Readings of Scientific English科技与社会Science&Society科技阅读Scientific Reading科学方法论Scientific Methodology科学计量Scientific Measurement科学技术史History of Science&Technology科学社会学概论Introduction to Scientific Socialism科学社会主义Scientific Socialism科学思维方法Methods of Scine tific Thinking科学学Scientology可计算性Calculability可靠性Reliability可靠性工程Reliability Engineering可靠性及故障诊断Reliability&Error Diagnosis可靠性技术导论Introduction to Reliability Technology可靠性数学Reliable Mathematics可靠性物理Reliability Physics可靠性与优化设计Reliability&Optimization Designing可逆式机组Reversible Machinery Group可逆式水力机械Reversible Hydraulic Machinery课程设计Course Exercise课程设计(接口)Course Exercise(Interface)空气调节Air Regulation空气调节与通风Air Regulation&Ventilation空气动力学Aerodynamics控制电机Electrical Machines for Control控制工程Control Engineering控制工程基础Basis of Control Engineering控制理论Theory of Control控制理论基础Elementary Theory of Control控制理论基础与水轮机调节Elementary Theory of Control&Water Turbine控制系统Control System控制系统仿真Control System Imitation控制系统设计Control System Design控制系统数字仿真Control System Digital Imitation控制系统数字仿真与CAD Control System Digital Imitation&CAD口腔/牙科科学Oral/Dental Sciences口腔生物学Oral Biology口腔外科学Oral Surgery口译Oral Intepretation口语Oral Training口语实践Oral Practice口语系列Oral Catena口语训练Oral Training跨国公司International Firm跨国公司理论与实务International Firm Concept&Affairs跨国公司专题研究Special Research of Transnational Corporation快速阅读Fast Reading L开头的课程劳动工资管理Management of Labor Wages乐理Music Theory雷达原理Principles of Radar雷电静电及环境Radar StaticElectricity&Environment冷冻干燥技术Freeze Drying Technique冷冻技术Refrigeration Technique冷库设计Refrigerating House Design离散数学Discrete Mathematics离心泵与轴流泵Centrifugal Pumps&Axial Pumps离心式压缩机模拟Centrifugal Compressor Imitation李代数Lie Algebra理疗学Physical Therapy理论力学Theoretical Mechanics理论生物学Theoretical Biology理论物理Theoretical Physics力热学Mechanics&Thermology力学Mechanics力学,热学Mechanics&Thermology力学实验Mechanics-Practical力学性能测试Mechanics Performance Testing立体化学Stereochemistry两相流动和传热Two-phase Flow&Thermal Conduction量子场论Quantum Field Theory量子光学与统计光学Quantum Optics and Statistical Optics量子化学(含群论)Quantum Chemistry(including Group Theory)量子力学Quantum Mechanics量子群表示Represe ntation of Quantum Groups劣质煤燃烧与利用Tinpot Coal Combustion&Use临床检验与诊断Clinical Check-up&Diagnosis临床科学Clinical Science临床心理学Clinical Psychology零件设计Element Design领导科学Leadership Science流场数值计算及性能预测Numerical Calculation of Flow Field流态化工程Fluidization Engineering流体力学Fluid Mechanics流体力学及液压传动Fluid Mechanics&Hydraulic Transmission流通经济学Circulation Economics六朝文论Articles of Six Dynasties鲁迅研究Research on LU Xun律师实务Lawyer Affairs绿色化学Green Chemistry伦理学Ethics轮机概论Introduction to Turbines论文写作Thesis Writing论文选读Study on Selected Papers论文指导Thesis Supervision逻辑程序设计与专家系统Logic Programming and Expert Systems逻辑设计Logic Design逻辑学Logic Theory螺杆压缩机Spiral Lobe Compressor螺杆制冷压缩机Spiral Lobe Refrigeration Compressor M开头的课程麻醉学Anesthesia马克思主义原理Principles of Marxism马列(社会学)原著选读Selected Readings ofMarx\'s&Lenin\'s Original Wor马列哲学原著选读Selected Readings of Marx\'s&Lenin\'s Original Wor马列主义原理Principles ofMarxism&Leninism马氏规划Martensitic Planning脉冲功率放大Pulse Power Magnification脉冲功率技术Pulse Power Techniques脉冲与数字电路Pulse&Digital Circuit毛泽东思想哲学研究Research on Mao Zedong\'s Thinking Philosophy煤粉燃烧技术及测量技术Coal PowerCombustion&Technology and Measurement美国文学作品选读Selected Readings of American Literature美术粉彩Art Powder Paint美术室外建筑写生Outdoors Architectural Sketch美术素描Art Sketch美学概论Introduction to Aesthetics蒙特卡罗方法在统计物理中的应用Applications of the Monte Carlo Method in Statistical Physics秘书学Secretary Science密封技术Sealing Technology免疫化学技术Immunochemical Technology,Methods for Immunological Chemistry免疫学Immunity,Immunology免疫遗传学Immunogenetics面向对象程序设计Object-Oriented Programming面向对象程序设计方法Design Methods of Object Oriented Program面向对象的程序设计Object Oriented Programming面向对象系统分析与设计Object-Oriented System Analysis and Design民法学Civil Law敏感器件Sensitive Apparatus敏感元件Sensors敏感元件及材料Sensors&Materials名篇赏析Appreciation of Master Pieces明清小说研究Research on NOVELS OF Ming&Qing Dynasties模糊数学Fuzzy Mathematics模糊信息处理技术Fuzzy Inf ormation Processing Technology模具计算机辅助设计Computer Aided Design of Models模拟电路Analog Circuitry模拟电子技术Analog Electronics Technique模拟电子技术基础Basic Analog Electronics模拟电子技术实验Analog Electronics Technique Experiment模拟电子线路Analog Electrical Circuitry模拟集成电路AnalogIntegrated Circuitry模拟集成电路及应用Analog IntegratedCircuit&Application模式识别Matrix Recognition模式识别Pattern Recognition模型辨识Model Distinguish膜模拟化学Membrane Mimetic Chemistry磨削原理Principle of Grinding and Cutting N开头的课程内部审计与政府审计Internal Auditing and Government Auditing内分泌学Endocrinology内燃机测试技术IC Engine Test Technology内燃机调节IC Engine Regulation内燃机动力学IC Engine Dynamics内燃机概论Introduction to IC Engine内燃机检测技术Measuring Technology for Internal-Combustion Engine内燃机结构Structure of Internal-Combustion Engine内燃机排气净化Purification of IC Exhaustive Gas内燃机强度Strength of Internal-Combustion Engine内燃机设计IC Engine Design内燃机原理Principles of Internal-Combustion Engine内燃机制造工艺学IC Manufacturing Technology内燃机装修Internal-Combust ion Engine Maintenance耐腐蚀非金属材料Erosion-Resisting Non-metallic Materials 能源工程Energy Source Engineering拟南芥-结构与发育Arobidosis-Structure and Development扭转振动Torque Vibration P开头的课程排压力波计算Computation of Pressure Extraction Wave配位化学Coordination Chemistry配位化学Coordination Chemistry皮肤学Dermatology疲劳断裂力学Fatigue Fracture Mechanics疲劳失效分析Fatigue Invalidation Analysis偏微分方程Partial Differential Equation偏微分方程近代方法The Recent Methods of Partial Differential Equations偏微分方程数值解Numerical Solution of Partial Differential Equation评报Commentary Report评论写作Commentary Writing普通化学General Chemistry普通话训练Mandarin Training普通逻辑General Logic普通生态学General Ecology普通生物学Biology,General Biology普通物理General Physics普通物理实验Lab of General Physics特别声明:1:资料来源于互联网,版权归属原作者2:资料内容属于网络意见,与本账号立场无关3:如有侵权,请告知,立即删除。
【Robot中英对照说明书】Function函数

【Robot中英对照说明书】Function函数For a given semi-axis always treated as positive (x>0), you can build a set of fi functions determined in the successive ranges separated by the characteristic points xi.对于给定的半轴总是被视为正(x>0),可以建立一组由特征点xi分开的连续范围内确定的FI函数。
When defining the fi function for the given range (xi, xi+1), the following should be considered:当定义给定范围的FI函数时,应考虑以下因素:•Origin point of the range xi.•The end point of the range xi+1 does not need to be specified, because it is the origin point of the next range or the function is determined without limiting the argument value, if it is the last range on the list.•Xi+1终点不需要指定,因为它是下一个范围的起点,或者如果不在列表中的最后一个范围,则函数不限制参数值而被确定。
•Each function formula is valid for x ≥ xi.•每个函数公式对于X均有效。
•Definition of the xi point alone without the determined function formula, completes the definition of the function set for a given semi-axis, for the points x > xi value of the function is zero.•在没有确定函数公式的情况下,仅定义xi点,完成给定半轴函数集的定义,对于函数xx>函数的xi值为零。
要给机器人(robot)下个明确的定义并不容易

¤@ §×1.1 ¤-n÷¤H {s ~Bc -wq qi°§O÷¤HPq Oê@ ¤@¨B- ¤H C t~o¤]ú¤F÷¤HP° §@ ± ÷ ¤ b@¤Ww¤-Q~k¤F A zQ¤÷Hà°¨ìj A Z÷íìzQ¤ A àWL¤HOdò A O¤{b A O° O÷ ¤HA¨ò yA (robot)¤U- F t¤@-ì]O±q¤P¨×÷H o¨S x Q ¨ ú¤°ò O ÷¤HC A à°÷P¨B ¤WNz¤Hné (software agent)Fesbó A ]°¤O¤Hsy q± C ¤§-wgiHb-±¤W C ¨°÷ ¤H {ê@Aáh C pGi úTwq¨¤eA ¤@-ì]OH÷¤ A |±o¨ì¤Pwq L× póA [29]°÷¤H oiA|¤@X C ¨ p G \àB ¤UF¤@ C wG ÷¤HO¤@uê@¤HyFè(autonomous robot)X{ R¨ì§l÷¤HPd÷ Meê÷¤Huà°X-Sw¤u§@ ÷¤HbY¨¤u§@¤Wà°÷±o¤Hn ¤u§@BObMI¤U°C¨s÷¤H-n¤@-èVO÷¤Hpó° °P÷¤Hh°¤¨Lé F á±`¨¤lNO÷¤uA °¤Si¤°÷H¨(manipulator)1(motion planning)¤èk¨Mw ÷¤Hpó°§@ -÷ ¤u A¤]NO| b¤ A @° ¤H¨ ÷¤H ¤Hbuê@¤°dòb A¤]NObo¨y-z w¤F°_lPפAI (obstacle)| of freedom)Fí÷¤HAV×jM]V°C A s ± °_IP×A ÷¤HA°c C B°-pNObA¤M§@±×KI C c¨A°¤S× (DOF, degree A b¤ìmP¤èVNOA A hAN]§to¨`¤× -n§Y- C ¨ p A ¤@-÷Hn±qeìm°¨ìY-aI éh¨ì§OB hAg ó° §@¨ ¤u§@C¤ B°-p¤§á iH±o¨ì ¨A§-÷ ¤H (free-flying)÷ A O` A ¤u§@ (workspace)hO÷ ¤@sêB°-y A O(path)A÷¤H Dp °uA(configuration)v Cói° F pG÷¤H§| C ¨ C b¤u§@¤¨Mw¤F÷¤H°_l¤× ¨A(configuration space)¤¤Aü÷¤HOuàW§@~ ÷¤HX§@nBG¨¤u§@¤÷H¨xO-n¤~২A ]¨h-÷¤HiH°v ]-p¤ ò§¨° u{¨ì¤ ià|¤I ¨±÷¤H q±`¨LkOà¨M§x°DC C -n¨ó¤èk¨Mo-°D A O¨C-÷¤HPuv¨Mw° A ¤où~÷| C h-÷¤HbB°¤jDNO¤WA ÷¤HP§iH¤°§UC b [9]¤¤¨ìFh-C Bh-÷¤H¨t¤ C §Y¨¤÷HGA ¨C-÷¤H\àiH A àa¨L÷¤H~ A ]°b-po¨|A ¨S{ìL÷¤H A ¨p¨üqWh-¨A o|B°A C Oo¨¤èkb-ph-÷¤HB° ìm A iHTO÷¤HbB°¤|IA pG{o-° C b¤m¤WA `N¨ìC-èL÷¤H A sé÷¤HB°-pq2(decoupled approach)P kO§°D¤ ¨L÷¤H| ¤H ÷¤H¨-p| F O {-p± A ¨C¤@-÷HpX| ±§ A ¤] ¨S n¤è kiH° C °¤hO§÷¤H°@-é C ¤÷uIO§°D¤¨h-¤l°D A |-¨ìá±p÷¤H A ¨C-÷¤H§O-pB°| A O¤@-p§°¤(centralized approach)C¤÷è F Oo¤èk¨¤í-{A á¨-p÷¤H×}§e-p÷ A í§@O¤@-×° A A¤§Oh¨M A Hià|X - °hjM (backtrack)B zC°¤ uI B i§ A ¤NOàb§A@jM]u-n×sbAzפWNiH§±o¨ìF IOí÷¤Hqh C A A×° A -p-p×° A jM¤]1.1 séB°-pbq°e¨¤lsé÷¤HB° (computer animation)¤¤ L{¤A-nséB°A¤èkOH¤u]w es§@néH¤A iHbi°÷¤Hs|Wq°e ê¤Hs¤WAq°eO§-D-nCbs§@°e (key frame)AMá (interpolation)¤èX¨C -e (frame)AC O¤Hh °31.1 ¤ ¨¤HsApG¤Huh¨C-e¨C-°e¤HìmA|áOíhC B°-pKO¤@¨Mèk {°C A u-nüw°_lPפA A ¤B°L{N1.2 °Dwqbo¤@` ú§-°]P¤Dèk ¤W÷HB°-p ¤H±qeìm °ì¤C A °-pXקKIB| C §-n¨M°D A §-|¤Wzq°e C ÷¤HséB°-p A ¨KO A ÷¤Hà°¨ì×I A úTwq-n¨M°D A sxwq G üw¤@-×I A NO¨-H A ¤@s÷ A ¨B1.2 Hy-z-±§-°]¤iHQ§vb¤@- h§¨í t~ -÷¤Hí°Pb|ê§Cp ¨í- C ¨ê§-nB G ÷¤H°úI A §-°]÷¤HXó§àXzH¨~]ê 1.3 ÷¤HséA§-¤@jê A p 1.2 ¤°ì C §-¨°]b-pL{¤O¤|°2D -±¤u§@¤A]H C (enclosing circle)¨í A ¨BCA u-n¤¨-êZ÷41.4A-ìb-±¤WA° ¤èV¨× θ(x, y, θ)÷¤HAꧨúNáiHXB Y ¤èVhU°¤@-ìZ÷ qCA ¨¤ìPZ÷O§-w1.3 P¤jpê¨í÷¤H1.4 Hêí÷¤iH¤èV¨× N -÷¤Hθ R1B R2……RN °_ PA ÷¤H CkA ÷¤HàoIbפ§-n±°QD lA à°÷§Q¨ì@Pa SA §X¤@q s±A GCb|A p 1.5 O A°CSB C1B C2……CG §¨¤@±| P ¤ó@-A5Ri P Rj ¤à àP ¤@꧰ìA-p¨±óOC-÷¤Hi¤J×I°ì A p 1.6(b)C §-¤üw¨CA p -÷¤HTw×Iy1.6(a)F BN¤@-÷H A ]×I G ¤CRi] ¤ A ¤ G O1.5 §-wqséB°-p°D1.6 Iwq1.3 ¨s¤èVPפ°^mséB°-pb¤m±Qh -{°¤p¨jM§ qh -páO§ó v ¤èk V°PZ÷ ¤|§A]iHTOP@÷N°IC A ¨Od§ A ¨§°¤séB-p A ¤]NOP@÷H¨ìUB§á A oI÷|° C §-±à°÷¤jML{I| C ] A °wséBS C s¤OF÷H¨CP@-è A ¤ìm A §-X¤@h°As A ¤e§¨ìXk A b[¤÷P°-p§á A OjMq±`¤[ B קKI¤U@¨BA A °¤-p§ó C S§Oí÷¤H A ] A §61. §-]-p¤F¤÷P°séB°-p ¤÷¨èkb¤Psé¤UvCA ¨Hê¤èR°P2. §-X¤Fh°As¤èk (sphere tree)cséA-°§C÷¤HI|UvPA ¨§°¤séB°-pC ¨y§3. ±NséB°-pGAóq°e¤HsB°C1.4 פ`[cb¤G B°-p P¤@¨§ièk As¤èk¨§°éB-p ¤PHUv qCáhO×P¨oi C ¤CObq°eW¨l B séB° C |O¤°séB-p C b¤ A §-Hê¤Uèkb A ¨úê¤W A §-zX¤@¨s B ¤y§c A ]A¤FXB°-pèk C b¤T A ¤÷séB°-p C ¤-hO° B h-÷¤H7。
工业应用移动机器人术语标准说明书

目 次前言 ................................................................................ I II1 范围 (1)2 规范性引用文件 ...................................................................... 1 3 通用术语 . (1)4 导航方式术语 (2)5 转向方式术语 ........................................................................ 3 6 驱动方式术语 ........................................................................ 4 7 驱动结构术语 ........................................................................ 4 8 性能参数 ............................................................................ 5 9 运动方向术语 (6)10 机构与零部件 (6)11 辅助零部件术语 ..................................................................... 7 12 软件功能术语 .. (8)13 充电/供电方式 (9)14 安全术语 .......................................................................... 10 英文索引 .. (12)中文索引 (14)全国团体标准信息平台前 言本标准按照GB/T1.1给出的规则起草。
机器人装调与维修英文说明书
机器人装调与维修英文说明书In the realm of robotics, the precision of assembly and the efficacy of maintenance are pivotal to the operational longevity and reliability of robots. This document serves as a comprehensive guide to the systematic procedures involved in the assembly, tuning, and maintenance of robots.Assembly。
The assembly of a robot is a meticulous process that begins with the preparation of the workspace. Ensure the area is clean, well-lit, and free of static electricity. Gather all necessary tools and components before commencing. Each part should be inspected for defects and compatibility.Start by assembling the core frame, which will support the robot's structure. Attach motors to their respective mounts, ensuring that all connections are secure and that the motors are able to rotate freely without obstruction. Proceed to install the power supply unit, taking care to route wires neatly to avoid entanglement or wear.Once the skeleton is assembled, begin attaching the outer panels. These should click or screw into place with precision, providing a protective shell for the internal components. Verify that all moving parts have the necessary clearance to operate without interference from the panels.Tuning。
机器人示教——精选推荐
Robot TeachingSince the late 20th century, the world's first 50 years after the birth of robot, robot technology has developed rapidly. Robotics is a national science and technology and modernization of the national economy, an important indicator of information is the key to open the door to the 21st century.With the development of robot technology, its application in the field of education has gradually taken seriously. Currently the robot is mainly used in classroom education, teaching and participating in various science and technology innovation at all levels, showing unparalleled educational value and great prospects for the development to be excavated.In the technology sector, the scientists will give each a clear definition of the term science and technology, but the robot is still no uniform definition. One reason is that the robot is still developing, the root cause is the robot to the people involved in the concept, making it difficult to answer philosophical questions. As early as 1967, the first robot of Japan's academic conference, experts have proposed two representative definition. Later emerging new ideas. Chinese scientists on the robot is defined as: "robot is an automated machine, the difference is that this machine has some similarity with human or biological intelligence capabilities,Such as perception, planning ability, motor ability and coordination ability, is a highly collaborative nature of the automated machines. "360毕业设计网Characteristics of teaching the robotTeaching is a robot-aided teaching, management, teaching, dealing with matters as well as teaching the robot the auspices of teaching functions.(2) Human-friendly. Teaching robots to be accepted by teachers and students must be humane of human-machine interface, human-machine communication barrier, operate and use smart. Especially for teachers and students ask questions and request, do not bother asking to be 100, language and sincere, self-esteem of teachers and students can not hurt.As an ideal teaching the robot should have the following nine characteristics of areas:(1)-teaching. Unlike industrial robots, robot teaching, and other robots, it is mainly used for teaching preaching Tuition FAQ and handling affairs, etc., should be required to give professional educators teaching robot teaching characteristics.(2) Human-friendly. Teaching robots to be accepted by teachers and students must be humane of human-machine interface, human-machine communication barrier, operate and use smart. Especially for teachers and students ask questions and request, do not bother asking to be 100, language and sincere, self-esteem of teachers and students can not hurt.(4) autonomy. Teaching the robot should have a strong independent decision-making, environmental adaptability, self-control.(5) knowledge richness. Teaching the robot should have extensive knowledge and deep expertise in particular subjects should be familiar with the latest results, with knowledge of the alternative expression.(3) high intelligence. Teaching the robot should have strong powers of observation, attention, memory, thinking, teachers and students in the state of timely, accurate analysis and prompt more correct response.(6) versatility. Teaching the robot should have assisted teaching, management teaching,daily routines and other functions.(7) Multi-forms of. Teaching the robot can have many forms, either human-type robot can move, it can be fixed in the classroom of the robot, and even computer software robots.(8) professional. Teaching the robot is not a panacea, should give it a certain professional characteristics and special duties, and pay attention to all disciplines of teaching robot coordination.(9) security. Teaching the robot in any case should be safe. No leakage, no electrical short circuit due to explosion or fire, not a sudden loss of "reason", there should be emergency safety measures and facilities.On the general issue of the security robot, 1950, U.S. science fiction writer Isaac Asimov in Aida Seck • "I am a robot," a book, made came to be generally accepted "three principles of robot": ①machine should not harm human beings; ② robot should comply with the order of mankind, with the exception of the first violation of an order; ③ robot should be able to protect themselves in conflict with the exception of the first phase. These principles are also teaching the robot design, manufacture and use must comply.The definition of robot educationRobot Education is learning to use robots, optimize its effectiveness and the way teachers and students work theory and practice.Understanding of the definition of the noteworthy issues:(1) robot education in two major areas of theory and practiceTheory, the robot has its own theoretical basis of education and basic theory, can form relatively independent of the subject system and method of system theory. Practice, robotic education refers to the robot as the main course content or teaching tool for teaching and learning activities undertaken, these activities are in practice the process of gradually completed.(2) to develop robotic education has two main purposes.First, the effect of optimizing teaching and learning, the second is to optimize the working methods of teachers and students. The former emphasis on less investment in education (including human, material, financial resources, time, etc.) to achieve greater educational results (mainly students of knowledge acquisition, skill formation, emotion training, etc.). The latter refers to the use of robots that work of teaching and learning tools, ways and means to improve teaching, teachers and students to reduce labor intensity, reduced labor time and improve labor efficiency.(3) Education There are five basic types of robots:① robot Subject Teaching② Robot-assisted instruction③ Management Teaching Robot④ robot agent (teacher) Services⑤ robot over teaching(4) artificial intelligence robot technology education emphasizes the application of information technology education in the new development.The core of education is based on the robot artificial intelligence technology in educationto materialization, humane, intelligent forms to be used. The development of information technology, artificial intelligence technology is a major leap forward. Information technology education in the future development trend is to be robots Education Center.Main features: a rib on the establishment of a new educational philosophy and education system; a rib on the reform of educational thought, methods, curriculum, teaching materials and evaluation system; help to improve the quality of education. Dry State wins in his master's thesis on the educational robot are explained as follows: Using artificial intelligence in the field of education to determine the robot action [2]. From the learning perspective, "education is a manufacturer specialized robots developed to stimulate student interest in learning to develop students ability to target the robot integrated product, package or spare parts" [3]. It is in addition to the robot body itself, there is a corresponding control software and teaching textbooks.There have been some domestic enterprises and companies to produce educational robot or teaching platform. Robots of different types of education are emerging, such as SmartCar [4], SUUNY618, Bosiweike educational robots have been put into the market. Robot technology is only developed after World War II technology. 1958 Consolidated U.S. companies produce the world's first industrial robot, robot development, thus opening a prelude to [5]. Kawasaki Heavy Industries of Japan in 1967, the company purchased from the United States permit the production of robots, the Japanese from the beginningThe research and manufacture of robot boom. With the wide range of robotic applications in industry, how to strengthen the workers to improve their understanding of the robot the robot's control has become a significant problem. Robot education, and will follow. April 3, 2003 to 7, held in Y okohama, Japan Robot Exhibition 2003 [6]. Education devoted to teaching the robot was born.Foreign education robot to carry out earlier. Back in the sixties of last century in Japan, the United States, Britain and other Western countries have already started in American universities, the research on robotics education, to the sixties they started the robot at the primary and secondary education, in the process also launched their own educational robot development platform based on [5]. Our robot research already carried out in seven eighties up during China's "Seventh Five-Y ear Plan", "863" plans have relevant content. But the robot for teaching primary and secondary schools started late, to late nineties of the last century has been the initial development ofThe current development is still not perfect.Educational robot used robot competitions and classroom teaching. Robotics Education Robotics Competition huge impact on the high-tech society has caused the United States, Europe, Japan and other developed countries and Asian countries attach great importance to the education sector in China has also been of great concern. Robot competition at home and abroad constantly, striking. Currently, the global number of robots in each of 100 race participants from primary, secondary and college students to researchers1) international competition. ①robot soccer competition. To the idea of robots playing soccer in 1995 by the Korea Institute of Science and Technology (KAIST) of Professor Jin Zhonghuan to develop multi-agent technology proposed. November 1996, he supported the South Korean government held its first micro-robot soccer World Cup. The most influentialinternational robot soccer mainly FIRA and RoboCup robot soccer World Cup two, these two games have strict rules, financial interest, ornamental, popular science as a whole, for more Y outh participation in international science and technology activities provide a good platform.FIRA is the abbreviation of International Robot Soccer Association, in 1997, the second micro-robot Championship (MiroSot '97) set up in Korea during the period. FIRA Robot Soccer World Cup, held once a year event, referred to as FIRARWC, where competition is different every year, has been set up in South Korea (three), France, Brazil, Australia (twice), China and other countries held multiple championships.RoboCup is an international organization, established in 1997 in Japan. RoboCup robotic soccer as a center to research topics, through the organization of robot soccer competition, to promote artificial intelligence, robotics and related disciplines. RoboCup's ultimate goal is to set up in 2050, a completely autonomous humanoid robot soccer team, to work with humans in a real football match. RoboCup has organized the eighth World Cup.Events are: computer simulation games, mini-soccer robot competition, medium-sized autonomous robot soccer competition, the four legged robot soccer, football and other humanoid robot projects. ②fire fighting robot contest. The idea of robots fighting in 1994 by the American College Trinity professor Jack Mendelssohn first proposed. Housing in a simulated game within Sishiyiting require participating robots out in the shortest time possible placed in any room in the candle. Players can choose different game modes, for example, could choose to set the playing field slopes or furnitureObstacles in the robot's control and the optional voice-activated remote control, put out candles used in the shortest time, the most difficult choice model, an integrated player for the championship points at least. Although the race only a few seconds or even just a fraction of the time, used to extinguish the robot is not more than 31 cubic centimeters volume, but contains a high technology content. At present, the robot fighting game has become the world's most popular race of intelligent robots.机器人示教自从20世纪50年代末世界上第一台机器人诞生之后,机器人技术得到了迅速的发展。
机器人导游英语作文高中

机器人导游英语作文高中Robot Tour Guide。
With the rapid development of technology, robots have become an indispensable part of our lives. They can be found in various fields, such as manufacturing, healthcare, and even entertainment. One of the most interesting applications of robots is as tour guides. In this essay, I will discuss the advantages and disadvantages of using robot tour guides and provide my perspective on this innovative concept.First and foremost, robot tour guides have several advantages. Firstly, they can provide accurate and up-to-date information about tourist attractions. Unlike human tour guides who may forget certain details or provide outdated information, robots are programmed with a vast amount of knowledge and can instantly access the latest data. This ensures that tourists receive reliable and relevant information during their visit.Secondly, robot tour guides can overcome language barriers. In today's globalized world, people fromdifferent countries and cultures travel to various destinations. Language differences often pose a challenge for tourists, as they may struggle to communicate withlocal tour guides. However, robot tour guides can be programmed to speak multiple languages fluently, enabling them to interact with tourists from different countries effectively. This enhances the overall tourism experience and promotes cross-cultural understanding.Furthermore, robot tour guides can provide a personalized experience for tourists. By collecting data on tourists' preferences and interests, robots can tailortheir explanations and recommendations accordingly. For example, if a tourist is interested in history, the robot can focus on providing detailed historical background information. This personalized approach ensures that tourists get the most out of their visit and have a memorable experience.Despite these advantages, there are also some disadvantages to using robot tour guides. Firstly, robots lack human emotions and empathy. Human tour guides can establish a connection with tourists, understand their needs, and provide emotional support if necessary. In contrast, robots may be perceived as cold and impersonal, which can negatively impact the overall tourism experience, especially for those seeking a more human touch.Secondly, robots may encounter technical issues or malfunctions. As with any technology, there is always a possibility of errors or breakdowns. If a robot tour guide malfunctions during a tour, it can disrupt the entire experience and leave tourists feeling frustrated. In such cases, human intervention may be required to resolve the issue, which defeats the purpose of using a robot tour guide in the first place.In conclusion, robot tour guides have both advantages and disadvantages. While they can provide accurate information, overcome language barriers, and offer personalized experiences, they lack human emotions and mayencounter technical issues. As technology continues to advance, it is essential to strike a balance between the convenience and efficiency of robots and the human touch that is irreplaceable. Ultimately, the decision to use robot tour guides should be based on the specific needs and preferences of tourists.。
Safe Robot Design Human-Safe Machines

Safe Robot Design Human-Safe Machines Designing human-safe machines, particularly safe robots, is a critical challenge in the field of robotics. As technology continues to advance, the integration of robots into various aspects of human life becomes more prevalent. From manufacturing to healthcare, robots are becoming an integral part of our society. However, with this integration comes the responsibility of ensuring that these machines do not pose a threat to human safety. This is a multifaceted problem that requires a comprehensive approach to address the various aspects of safety in robot design.One of the key considerations in designing human-safe robots is the physical safety of humans who interact with these machines. This includes ensuring that robots are equipped with sensors and algorithms that allow them to detect and respond to the presence of humans in their vicinity. For example, in industrial settings where robots work alongside human workers, it is essential to have safety mechanisms in place to prevent collisions and other accidents. Additionally, robots should be designed with physical features that minimize the risk of injury in the event of a collision, such as rounded edges and soft materials.Another important aspect of human-safe robot design is the need to prevent harm caused by the actions of the robot itself. This requires the implementation of robust control systems that can accurately predict and prevent potentially harmful movements or behaviors. For instance, in the case of collaborative robots that work in close proximity to humans, it is crucial to have advanced motion planning algorithms that can ensure safe and predictable movements. Moreover, robots should be equipped with emergency stop mechanisms that can be activated in the event of an unexpected situation to prevent harm to humans.In addition to physical safety, it is also essential to consider the psychological and emotional safety of humans who interact with robots. As robots become more advanced and human-like in their capabilities, there is a growing concern about the potential emotional impact of interacting with machines. For example, in healthcare settings where robots are used to provide care and companionship to the elderly, it is crucial to designrobots that can establish empathetic and supportive interactions with humans. This requires the integration of emotional intelligence and social skills into the design of robots, as well as the implementation of ethical guidelines to ensure that robots do not exploit or manipulate human emotions.Furthermore, ensuring the cybersecurity of robots is another critical aspect of human-safe robot design. As robots become more connected and autonomous, they become vulnerable to cyber attacks that can compromise their safety and the safety of humans around them. It is essential to implement robust cybersecurity measures, such as encryption and authentication protocols, to prevent unauthorized access to robots and the manipulation of their behavior. Additionally, continuous monitoring and updating of security measures are necessary to adapt to evolving cyber threats.Moreover, the ethical considerations surrounding the use of robots in various domains cannot be overlooked. As robots take on more complex tasks and responsibilities, it is essential to establish clear ethical guidelines for their design and use. This includes addressing issues such as accountability for the actions of robots, the potential displacement of human workers, and the impact of robots on social dynamics. Designing human-safe robots requires a thoughtful and conscientious approach to ensure that these machines are not only physically safe but also aligned with ethical principles that prioritize human well-being.In conclusion, the design of human-safe robots is a multifaceted problem that requires a comprehensive approach to address the various aspects of safety. From physical safety to emotional well-being, cybersecurity, and ethical considerations, ensuring the safety of humans who interact with robots is a complex and evolving challenge. As technology continues to advance, it is essential for designers, engineers, and policymakers to collaborate in developing and implementing robust safety measures and ethical guidelines to ensure that robots enhance human life without posing a threat to human safety and well-being.。
机器人导游英语作文

机器人导游英语作文Robot Tour Guides: The Future of Travel。
Imagine stepping into a new city and being greeted by a robot tour guide, all smiles and ready to answer your questions. No more fumbling with maps or trying to understand confusing local signage. The robot guide knows exactly where you are and where you want to go.These robot guides are packed with information. They can tell you about the history of the place, interesting facts, and even recommend the best local food. Plus, they never tire or get lost, unlike human guides.But it's not just about information. These robots have personality! Some are funny and light-hearted, making the tour more enjoyable. Others are serious and educational, perfect for those who want to learn more about the culture and history.And the best part? No language barrier! Whether you speak English, Spanish, or any other language, the robot guide can adjust to your needs. No more worries about not understanding the tour or missing out on important details.Of course, some people might miss the human touch of a traditional tour guide. But these robots are designed to be friendly。
机器人大师56982的快速引用指南说明书

2. Pull up the lower spray arm to remove.
3. Check the outlet nozzles on the spray arms for blockages under running water and remove any foreign bodies.
and remove. 2. On initial start-up: Fill the dispenser right up with
water.
Adding rinse aid
1. Press the catch on the lid
of the dispenser for rinse
2
aid and lift .
7. To cancel the programme, press
for
approx. 4 seconds.
The programme is cancelled and ends after ap-
prox. 1 minute.
Cleaning filters
1. After each wash check the filters for
Water tap is turned off. ▶ Turn on the water tap.
Water tap is jammed or furred up. ▶ Turn on the water tap.
The flow rate must be at least 10 l/min when the water supply is open.
1) 2:10 2) 1.130 3) 15.0
1) 0:15 - 0:15 2) 0.050 - 0.050 3) 4.0 - 4.0
RMHS系列的协同机器人空气铒铛说明书
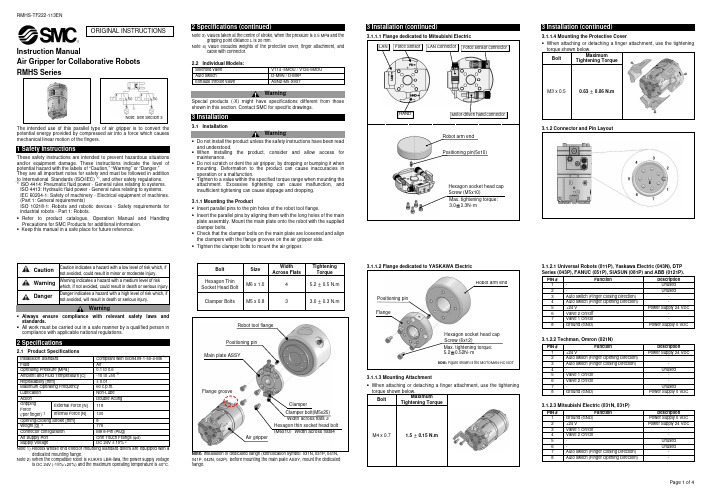
Instruction ManualAir Gripper for Collaborative RobotsRMHS SeriesTheintendeduse ofthisparallel typeofairgripperis toconvert the potential energy provided by compressed air into a force which causes mechanical linear motion of the fingers.These safety instructions are intended to prevent hazardous situations and/or equipment damage. These instructions indicate the level of potential hazard with the labels of “Caution,” “Warning” or “Danger.”They are all important notes for safety and must be followed in addition to International Standards (ISO/IEC) *1), and other safety regulations. *1)ISO 4414: Pneumatic fluid power - General rules relating to systems. ISO 4413: Hydraulic fluid power - General rules relating to systems.IEC 60204-1: Safety of machinery - Electrical equipment of machines. (Part 1: General requirements)ISO 10218-1: Robots and robotic devices - Safety requirements for industrial robots - Part 1: Robots.• Refer to product catalogue, Operation Manual and Handling Precautions for SMC Products for additional information. • Keep this manual in a safe place for future reference.Caution Caution indicates a hazard with a low level of risk which, if not avoided, could result in minor or moderate injury.WarningWarning indicates a hazard with a medium level of riskwhich, if not avoided, could result in death or serious injury.DangerDanger indicates a hazard with a high level of risk which, ifnot avoided, will result in death or serious injury.Warning• Always ensure compliance with relevant safety laws and standards.• All work must be carried out in a safe manner by a qualified person in compliance with applicable national regulations.2.1 Product SpecificationsInstallation Standard Compliant with ISO9409-1-50-4-M6 *1Fluid Air Operating Pressure [MPa] 0.1 to 0.6 Ambient and Fluid Temperature [C] -10 to +50 *2 Repeatability [mm] ± 0.01 Maximum Operating Frequency 60 c.p.m. Lubrication Non-Lube Action Double Acting Gripping Force(/per finger) *3External Force [N] 118 Internal Force [N] 130 Opening/Closing Stroke [mm] 8 Weight [g] *4 776 Connector configuration M8 8-Pin (Plug) Air Supply Port One Touch Fittings (φ4) Supply Voltage DC 24V ± 10%*2Note 1) Robots whose end effector mounting standard differs are equipped with adedicated mounting flange.Note 2) When the compatible robot is KUKA's LBR-iiwa, the power supply voltageis DC 24V (-15%/+20%) and the maximum operating temperature is 40°C.Note 3) Values taken at the centre of stroke, when the pressure is 0.5 MPa and thegripping point distance L is 20 mm.Note 4) Value excludes weights of the protective cover, finger attachment, andcable with connector.2.2 Individual Models:Solenoid valve V114 -5MOU / V124-5MOU Auto switchD-M9N / D-M9P Exhaust throttle valveASN2-M5-X937WarningSpecial products (-X) might have specifications different from those shown in this section. Contact SMC for specific drawings.3 Installation3.1 InstallationWarning• Do not install the product unless the safety instructions have been read and understood.• When installing the product, consider and allow access for maintenance.• Do not scratch or dent the air gripper, by dropping or bumping it when mounting. Deformation to the product can cause inaccuracies in operation or a malfunction.• Tighten to a value within the specified torque range when mounting the attachment. Excessive tightening can cause malfunction, and insufficient tightening can cause slippage and dropping.3.1.1 Mounting the Product• Insert parallel pins to the pin holes of the robot tool flange.• Insert the parallel pins by aligning them with the long holes of the main plate assembly. Mount the main plate onto the robot with the supplied clamper bolts.• Check that the clamper bolts on the main plate are loosened and align the clampers with the flange grooves on the air gripper side. • Tighten the clamper bolts to mount the air gripper.Bolt Size Width Across FlatsTightening Torque Hexagon Thin Socket Head Bolt M6 x 1.045.2 0.5 N.mClamper Bolts M5 x 0.8 3 3.0 0.3 N.mNote: Installation of dedicated flange (identification symbol: 031N, 031P, 041N, 041P, 042N, 042P). Before mounting the main plate ASSY, mount the dedicated flange.3.1.1.2 Flange dedicated to YASKAWA ElectricNote: Figure shown is the MOTOMAN-HC10DT 3.1.1.3 Mounting Attachment• When attaching or detaching a finger attachment, use the tightening torque shown below.BoltMaximum Tightening TorqueM4 x 0.71.5 0.15 N.m3.1.1.4 Mounting the Protective Cover• When attaching or detaching a finger attachment, use the tightening torque shown below.BoltMaximum Tightening TorqueM3 x 0.50.63 0.06 N.m3.1.2 Connector and Pin Layout3.1.2.1 Universal Robots (011P), Yaskawa Electric (043N), DTP Series (043P), FANUC (051P), SIASUN (081P) and ABB (0121P).PIN # FunctionDescription 1 - Unused 2 -Unused3 Auto switch (Finger Closing Direction) -4 Auto switch (Finger Opening Direction) -5 +24 VPower Supply 24 VDC6 Valve 2 On/Off -7 Valve 1 On/Off -8Ground (GND)Power Supply 0 VDC3.1.2.2 Techman, Omron (021N)PIN # FunctionDescription1 +24 VPower Supply 24 VDC2 Auto switch (Finger Opening Direction) -3 Auto switch (Finger Closing Direction) -4 -Unused5 Valve 1 On/Off -6 Valve 2 On/Off -7 -Unused8Ground (GND)Power Supply 0 VDC3.1.2.3 Mitsubishi Electric (031N, 031P)PIN # FunctionDescription 1 Ground (GND) Power Supply 0 VDC 2 +24 VPower Supply 24 VDC3 Valve 1 On/Off -4 Valve 2 On/Off -5 - Unused6 -Unused7 Auto switch (Finger Closing Direction) - 8Auto switch (Finger Opening Direction)-ORIGINAL INSTRUCTIONSNote: See Section 3 Main plate ASSYFlange grooveClamperClamper bolt(M5x25)(M6x10)Width across flats4LANForce SensorHANDMotor-driven hand connectorForce sensor connectorLAN ConnectorHexagon socket head cap Screw (M5x10) Positioning pin(5x10)Positioning pinMax. tightening torque: 5.2±0.52N ・mHexagon socket head cap Screw (6x12)3.1.2.4 Yaskawa Electric (041N, 041P, 042N, 042P, 111P)PIN # Function Description1 +24 V Power Supply 24 VDC2 Ground (GND) Power Supply 0 VDC3 Valve 1 On/Off -4 Valve 2 On/Off -5 Auto switch (Finger Opening Direction) -6 Auto switch (Finger Closing Direction) -7 - Unused8 - Unused3.1.2.5 KUKA (061P)PIN # Function Description1 +24 V Power Supply 24 VDC2 - Unused3 Auto switch (Finger Opening Direction) -4 Auto switch (Finger Closing Direction) -5 Valve 1 On/Off -6 Valve 2 On/Off -7 - Unused8 Ground (GND) Power Supply 0 VDC3.1.2.6 Doosan Robotics (071P)PIN # Function Description1 Auto switch (Finger Opening Direction) -2 Valve 1 On/Off -3 Valve 2 On/Off -4 - Unused5 +24 V Power Supply 24 VDC6 - Unused7 Auto switch (Finger Closing Direction) -8 Ground (GND) Power Supply 0 VDC3.1.2.7 JAKA (091N, 091P)PIN # Function Description1 +24 V Power Supply 24 VDC2 Auto switch (Finger Opening Direction) -3 Auto switch (Finger Closing Direction) -4 Valve 1 On/Off -5 Valve 2 On/Off -6 - Unused7 - Unused8 Ground (GND) Power Supply 0 VDC3.1.2.8 AUBO (101N)PIN # Function Description1 Ground (GND) Power Supply 0 VDC2 +24 V Power Supply 24 VDC3 Auto switch (Finger Opening Direction) -4 Auto switch (Finger Closing Direction) -5 Valve 1 On/Off -6 - Unused7 Valve 2 On/Off -8 - Unused 3.1.3 Internal Circuit DiagramsUniversal Robots (011P)Switch Output: PNPValve: +COMOmron/Techman (021N)Switch Output: NPNValve: +COMMitsubishi Electric (031N)Switch Output: NPNValve: +COMMitsubishi Electric (031P)Switch Output: PNPValve: -COMYaskawa Electric (041N,042N)Switch Output: NPNValve: +COMYaskawa Electric (041P,042P)Switch Output: PNPValve: -COMYaskawa Electric (043N)Switch Output: NPNValve: +COMYaskawa Electric (043P)Switch Output: PNPValve: -COMFUNAC (051P)Switch Output: PNPValve: +COMKUKA (061P)Switch Output: PNPValve: -COMDoosan (071P)Switch Output: PNPValve: -COMSIASUN (081P)Switch Output: PNPValve: -COMJAKA (091N)Switch Output: NPNValve: +COMJAKA (091P)Switch Output: PNPValve: -COMAUBO (101N)Switch Output: NPNValve: +COMHAN’S ROBOT (111P)Switch Output: PNPValve: +COMABB (121P)Switch Output: PNPValve: +COM3.2 EnvironmentWarning•Do not use in an environment where corrosive gases, chemicals, saltwater or steam are present.•Do not use in an explosive atmosphere.•Do not expose to direct sunlight. Use a suitable protective cover.•Do not install in a location subject to vibration or impact.•Do not mount in a location exposed to radiant heat that would result intemperatures in excess of the product’s specifications.•Do not use this product in a dusty environment, or in an environmentin which water or oil can splash onto the product.3.3 PipingCaution•Before connecting piping make sure to clean up chips, cutting oil, dustetc.•When installing piping or fittings, ensure sealant material does notenter inside the port. When using seal tape, leave 1 thread exposedon the end of the pipe/fitting.•Connect tubing with outer diameter Ø4mm to the air supply port. Toremove the tubing, press the release button and pull.3.4 Pneumatic Circuit DiagramBasic Form Normally Open Normally Closed3.5 Wiring•When installing and securing the cable between the air gripper and thetool flange, do not energise the product.Ensure that the connect is secure before operating to prevent it3.6 LubricationCaution•SMC products have been lubricated for life at manufacture, and do notrequire lubrication in service.•If a lubricant is used in the system, refer to catalogue for details.4 Settings4.1 Finger Opening/Closing Speed Adjustment•Use a flat blade screwdriver for adjusting the metering valves.•Ensure that the restriction of the two metering valves is approximatelythe same. If they differ too much, the operation can become unstable.4.2 Relationship between Valve ON/OFF and Gripper ActionEnergization stateof valveGripper actionSolenoidvalve (1)Solenoidvalve (2)Basic typeNormalopenNormalcloseOFF OFF No pressureapplied *1FingeropeningFinger closingON OFF Finger opening No pressureapplied *1Pressureapplied toboth sides *2OFF ON Finger closingPressureapplied toboth sides *2No pressureapplied *1ON ON Pressure appliedto both sides *2FingerclosingFingeropeningAir supply portapplicable tubeouter diameter 4Note 1) When no pressure is applied, there is no air pressure on either the open orclose side of the piston, therefore the fingers can be moved by hand.Note 2) When pressure is applied to both sides, air is on both sides of the piston,however due to the construction there will be a small force generated in theclosing direction.Refer to product catalogue for ‘How to Order’.〇Compatible robot6 Outline DimensionsRefer to product catalogue for outline dimensions.7 Maintenance7.1 General maintenanceCaution•Not following proper maintenance procedures could cause the productto malfunction and lead to equipment damage.•If handled improperly, compressed air can be dangerous.•Maintenance of pneumatic systems should be performed only byqualified personnel.•Before performing maintenance, turn off the power supply and be sureto cut off the supply pressure. Confirm that the air is released toatmosphere.•After installation and maintenance, apply operating pressure andpower to the equipment and perform appropriate functional andleakage tests to make sure the equipment is installed correctly.•If any electrical connections are disturbed during maintenance, ensurethey are reconnected correctly and safety checks are carried out asrequired to ensure continued compliance with applicable nationalregulations.•Do not make any modification to the product.•Do not disassemble the product, unless required by installation ormaintenance instructions.Warning•When air grippers are removed for maintenance, first confirm thatmeasures are in place to prevent any workpieces from dropping, run-away of equipment. Then cut off the supply pressure and electricpower and exhaust all compressed air from the system using theresidual pressure release function. When the equipment is restarted,proceed with caution after confirming that appropriate measures are inplace to prevent cylinders from sudden movement.•Do not allow people to enter or place objects in the carrying path of theair gripper.•Do not put hands in between the air gripper fingers or attachments.7.2 Procedure for replacing Gripper•Loosen the screw of the auto switch.•Loosen the hexagon socket head cap screws (M5x40) which securethe gripper and remove the gripper assembly.•Replace the gripper and mount the dismounted parts by following theabove steps in the reverse order.Caution•When disassembly the product, take care not to lose the positioningpin and the O-ring.•The lengths of the cables of the two auto switches are different fromeach other. When installing the switches, fix them as shown above.7.3 Procedure for replacing Auto Switch•Follow the same steps as described in Section 7.2.•Loosen the hexagon socket head cap screws (M4x8) and remove theflange.•Loosen the hexagon socket head cap screws (M4x8) and remove thetool plate.•Take the auto switches out from the tool plate side to the extent thatthe connector of the substrate in the module base is visible.•Replace the auto switch assembly by disconnecting the connector andmount the dismounted parts by following the above steps in the reverseorder.Step 2Caution•When disassembly the product, take care not to lose the positioningpin and the O-ring.7.4 Procedure for replacing the solenoid valve (Basic Type)•Loosen the cross recessed head machine screw (M2x5) and take thesolenoid valve out.•Replace the valve by disconnecting the connector and mount thedismounted parts by following the above step.Caution• A gasket is mounted on the solenoid valve. Take care not to lose thegasket or have dirt attach on it at the time of replacement.•Mount the solenoid valve while placing the cable with a marking to bebelow the other cable.7.5 Procedure for replacing the solenoid valve (Normally Open,Normally Closed)In the normally open or normally closed version, a piping block isassembled between the valve on one side and the module base. Thevalve on the side with the piping block should be replaced with V124-5MOU and the valve on the other side with V114-5MOU. Thereplacement procedure is the same as for the basic type.•Remove the valve by following the same procedures as those for basictype.•Mount a gasket on the piping block, and secure the block to the modulebase.•*1 While moving the piping block in the direction indicated by the arrowin the figure below, secure it with screws.•Mount the connector to the valve, and install the valve on top of thepiping block.Cross recessed round headscrew (M2x5)tightening torque:0.18±0.02N・mConnectorGasketHexagon socket headcap screw (M4x8)width across flats 3tightening torque:1.5±0.15N・mTool platePositioningpinMount the solenoid valve whileplacing the cable with a markingbelow the other cable.O-ringPositioning pinHexagon sockethead cap screw:M5x40Max. tighteningtorque:3.0±0.3 N・mMarkingAuto switchMax.tightning torque:0.05 to 0.15N・mO-ringHexagon socket headcap screw (M4x8)width across flats 3Tightening torque:1.5±0.15N・mPositioningpinFlangeConnectorBaseModule baseAuto switchStep 1Caution• When installing the gasket on the piping block, pay attention not to have dirt attach to it.• Mount the solenoid valve while placing the cable with a marking be below the other cable.7.6 Solenoid Valve Part NumbersValve 1 Valve 2 Basic Form V114-5MOU V114-5MOU Normally Open V124-5MOU + Piping block assemblyV114-5MOU Normally Closed V114-5MOUV124-5MOU + Piping block assembly8 Limitations of Use8.1 Limited warranty and disclaimer/compliance requirements Refer to Handling Precautions for SMC Products.Warning• Do not operate this product at specifications beyond what has been specified, as this can cause damage and/or malfunction to the product. • Do not allow people to enter or place objects in the carrying path of the air gripper. Otherwise, injury or accident may occur.• Do not put hands in between the air gripper fingers or attachments. It is the end-user’s responsibility to take relevant safety measures e.g. protective covers to prevent this.• There is a danger that workpieces may be dropped if there is a reduction in gripping force, caused by a power failure. It is the end-user’s responsibility to take measures to prevent drop prevention which can lead to injury, or damage to machinery or equipment.• If the product is used for any purpose other than the transportation of a workpiece such positioning of clamping, please consult SMC.9 Product DisposalThis product shall not be disposed of as municipal waste. Check your local regulations and guidelines to dispose this product correctly, in order to reduce the impact on human health and the environment.10 ContactsRefer to or www.smc.eu for your local distributor/importer.URL : https:// (Global) https:// www.smc.eu (Europe) SMC Corporation, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JapanSpecifications are subject to change without prior notice from the manufacturer. © 2022 SMC Corporation All Rights Reserved. Template DKP50047-F-085MGasket。
开关机器人操纵手说明书

IL01222027EEffective Date 11/07Instruction Leaflet for Series G L - Frame Motor OperatorDO NOT ATTEMPT TO INSTALL OR PERFORM MAINTENANCE ON EQUIPMENT WHILE IT IS ENERGIZED. DEATH OR SEVERE PERSONAL INJURY CAN RESULT FROM CONTACT WITH ENERGIZED EQUIPMENT.ALWAYS VERIFY THAT NO VOLTAGE IS PRESENT BEFORE PROCEEDING.WARNINGRemove existing two screws from primary cover of breaker.Assemble support onto the breaker with four mounting screws supplied. Torque to 0.44 to 0.6 N.m or 4 to 5 in. lb.4•Turn breaker to the “OFF” position first.•Line up breaker handle and molded trigger of motor operator, and position motor operator on the breaker.Mount motor operator to breaker using mounting screws. Torque to 0.44 to 0.6 N.m or 4 to 5 in. lb.SupportMolded Trigger Mounting Screws (14 mm length)Breaker HandleMounting Screws(35 mm length) Mounting Screws(100 mm length)Manual OperationsMove the slide knob to the MANUAL position to expose the manual operating shaft located under the slide knob. The control power supply is cut off automatically.Insert the operating key into shaft slot. Turn the key clockwise to verify the breaker can be closed Leave breaker in the ON position. Press the manual PUSH-TO-TRIP button on the breaker to trip the breaker. Check that the display indicates the TRIP position.Turn the operating key clockwise (approximately 180°) again. This should reset the breaker. Turn the key (Clockwise only)Status IndicationPUSH-TO TRIP ButtonOpetating keyEffective Date 11/07Motor Operator Electrical DataVoltage Frequency Inrush Current 24VDC Application110-127VAC/110-125VDC Application48VDC Application9Lock-Off LeverLOCK-OFFMove slide knob to AUTO position. Pull outthe Lock-Off lever when breaker is in OFFposition, insert one to three padlock shacklesup to 6mm (.25 inch) in diameter.CAUTIONThe motor operator cannot be locked offwhile it is in the ON position.Printed in TQC。
机器人(AS-MII)教案

机器人教案第一周与学生进行自我介绍,并认识学生。
介绍这门课程开设的目的和内容。
带学生去机房,安排座位,观看机器人场地。
告知机房的使用规则。
第二周走进机器人的世界一、教学目标知识与技能:1.了解机器人的诞生与发展历史。
2.了解能力风暴机器人AS-MII。
过程与方法:给学生展示各种机器人,并介绍其功能,是同学们对机器人有较深的认识。
情感态度价值观:通过了解中国古代的机器人,伶人、木鸟、木牛流马,使学生们认识到中国人的智慧与伟大。
通过接触能力风暴机器人,使同学们产生兴趣,并能积极投入到学习氛围中。
二、教学重点与难点其实机器人在我们的日常生活中无处不在,如吸尘器、电梯等,通过这些常见的机器人,可以使大家能更好理解机器人。
三、课前准备制作课件“走进机器人世界”。
四、教学过程第三周让机器人动起来一、教学目标知识与技能:1.了解能力风暴机器人开发软件。
认识流程图。
熟悉模块的操作。
2.能使用开发软件让机器人动起来,并完成走正方形。
过程与方法:认识机器人开发软件仿真vjc1.5,并介绍其界面和使用方法。
分析机器人走正方形步骤,为今后让机器人做更复杂动作时做好基础。
情感态度价值观:通过使用开发软件让机器人动起来,认识到,机器人是人类智慧的结晶,机器人只有在人的指令下才能工作,从而认识到机器是永远不可能代替人类的。
通过实现机器人走正方形,同学们可以感受到学习的乐趣。
二、教学重点与难点教学重点:知道流程图的执行过程。
在机器人走正方形过程中,修改参数时掌握固定一个的方法,能很快调整到一个好的状态。
教学难点:对于流程图的概念,学生们以前没有接触过,可能会有些同学不容易理解。
可以用简单的话去解释,尽量不要复杂话。
三、课前准备安装机器人开发软件仿真版vjc1.5。
四、教学过程(一)能力风暴机器人开发软件图形化交互式C 语言(简称VJC)是用于AS-MII 的专用开发系统具有基于流程图的编程语言与交互式C语言。
目前的最新版本为VJC1.6 ,它由流程图编辑界面和JC 代码编辑界面组成。
不错资料

前言本指导性技术文件为首次制定。
为了方便使用,在正文中简称“本文件”。
本指导性技术文件由上海中为智能机器人有限公司负责起草。
本指导性技术文件主要起草人:卢秋红、蒋金鹏。
引言随着移动机器人技术的迅猛发展,移动机器人已经进入了公共安全等领域。
关于移动机器人的性能指标的判定尚无国内国际标准。
为了能够恰当地评价移动机器人的各项重要指标,特制定本文件,目的是能为移动机器人,尤其是轮式和履带式的移动机器人的性能测试提供方法和评判指南。
本文件的制定参考了一些工业机器人的相关标准,本文件与这些标准没有密切相关以及违背和冲突的部分。
移动机器人测试方法和性能评估规范指南1、范围本文件提供了如何测试轮式或履带式移动机器人的各项功能。
现有文件没有给出移动机器人的测试方法,也没有单独给出轮式或者履带式机器人的测试方法。
本文件旨在为这两种机构的移动机器人提供一个测试程序,并能对测试结果的评价提供指导。
2、规范性引用文件无3、定义3.1 移动机器人mobile robot主要是指能自由移动的,移动机器人都带有至少一个移动机构。
机器人的移动机构是多种多样的,主要包括以下几种形式:车轮式、履带式、双足式、多足式、混合式、水中移动机构、空中移动机构等。
3.2 履带机构track mechanism一般由车体和配置在车体左右的各一组履带组成驱动机构。
履带机构一般由履带、支撑轮、支撑框架、主动轮、被动轮组成。
3.3 遥控操作单元OCU operator control unit3.4 多自由度机械手臂multi-DOF robot是指具有两个以上自由度的机械装置,可以完成物体抓取等操作。
3.5 最大行驶速度maximum speed是指机器人在平坦的地面上所能达到的最大直线运行速度。
3.6 转弯半径turning radius是指机器人旋转运动时行走的圆形轨迹的圆心与机器人的质心(一般为左右两履带机构主动轮连线中心)之间的距离。
3.7 爬坡度grade ability是指机器人能够行使的路面的最大坡度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
广东省机器人大赛
接力赛机器人
说明手册
广东省智能软件与机器人分会华南理工大学智能软件与机器人研究室
2011.10.17
目录
目录 (2)
1.概况 (3)
2.部件 (3)
2.1.主要部件 (3)
2.2.主要部件及数量 (5)
2.3.嵌入式控制板 (5)
2.4.传感器 (7)
2.5.RGB发光管 (8)
2.6.光敏电阻 (8)
2.7.高分子材料 (9)
3.编程 (9)
3.1.Arduino软件开发环境 (9)
3.2.例子程序 (12)
1.概况
接力赛机器人由普通电池供电,具有前进、后退、转弯、颜色检测、障碍物检测等功能。
机器人在运动的过程中能同时检测地面颜色,如果偏离了正常轨道,也能及时调整前进的方向。
碰撞开关可用来获取障碍物信息和向队友传递接力信息。
2.部件
2.1.主要部件
机器人部件主要包括骨架、面包板、嵌入式控制板、轮子、电机、万向轮、电池盒、RGB管、光敏电阻、变阻器、杜邦线、高分子材料和电容等。
图1-5为部件示意图。
图1 面包板、控制板等
图2 机器人底部视图
图3 机器人俯瞰图
图4 杜邦线、电池盒
图5 高分子材料
2.2.主要部件及数量
骨架:1个
面包板:1个
嵌入式控制板:1个
电容:1个(0.1uF)
RGB管:1个
光敏电阻:1个
变阻器:4个(3量程为1K,1个量程为10K)
轮子:2个
电机:2个
万向轮:1个
触碰开关:1对
电池盒:1个
高分子材料:(1小袋)
杜邦线:若干
螺丝:若干
2.3.嵌入式控制板
控制板主要包括单片机Atmel Atmega8A、电机驱动电路及相应外围电路。
控
制板通过USB 线连接PC 机,需安装所提供的驱动程序(CP210x.rar )。
安装完毕后,系统显示为一个串口设备comX (X 为串口的编号,具体编号请在“控制面板”中的硬件信息查看)。
图 6 嵌入式控制板的接口
(蓝色框内端口为地GND ,红色框内端口为电源VDD )
左电机 接口
右电机 接口
电池 接口
电源 开关
USB 接口
图7 嵌入式控制板管脚图
在图7中,模拟端口0-5分别和数字端口14-19共用管脚。
2.4.传感器
机器人前方安装两个碰撞开关,红色线(编号2)为公共端口,蓝色线为左碰撞开关(编号3),黑色线为右碰撞开关(编号1)。
在未触碰情况下,1、3与2均为断开状态;若左碰撞开关发生碰撞,则3和2导通;若右碰撞开关发生碰撞,则1和2导通。
传感器接入电路的方法是:2接地,1和3分别接到单片机的两个端口,每个端口配置有上拉电阻。
图8 碰撞开关
VDD
B
VDD
GND
B
(a)未碰撞 (b)碰撞
图 9 碰撞开关的接入原理图
2.5. RGB 发光管
RGB 发光管能发出红、绿、蓝3种颜色的光,发光管的一端接地,另一端通过变阻器接到嵌入式控制板的端口,变阻器的量程为1K ,电路图如下:
变阻器
D2D3D4
RGB 管
图 10 RGB 管与变阻器电路图
2.6. 光敏电阻
光敏电阻与变阻器连接,变阻器的量程为10K ,电路图如下:
VCC
图 11 光敏电阻与变阻器电路图
2.7. 高分子材料
高分子材料为白色颗粒状的绝缘体,在高于60℃的水中会熔化,在凝固之前可用手将其捏成任意形状,凝固后形状稳定、可重复使用。
图12 用高分子材料装饰后的RGB 管
3. 编程
3.1. Arduino 软件开发环境
Arduino 用于编写及下载嵌入式控制板的程序(软件网址为 ),解压arduino-0018.zip 到一个目录即可直接使用。
软件平台提供的API 见帮助文件(目录为reference ),索引文件为Index.html 。
核心源代码见目录
\hardware\arduino\cores\arduino。
软件设置选择板的类型为Atmega8,串口选择根据嵌入式板对应的编号。
程序Project的目录名必须与程序的文件名一致。
图9 控制板类型设置
图10 串口选择
图11 Project目录名与程序名的关系
图12 下载程序按钮
图1 串口调试按钮
发送数据区
接收数据区
波特率
图2 串口调试界面
3.2.例子程序
例子程序见sample.rar。
每个程序的功能在readme文件中都有详细说明。
共4个程序,部分代码如下。
程序一:使LED灯每秒闪烁一次
digitalWrite(led, 1); //亮
delay(1000); //延迟1000毫秒
digitalWrite(led,0); //熄
delay(1000); //延迟1000毫秒
程序二:测试颜色值
//读取环境颜色值
ambientvalue=0; //初始化环境基准值
ambientvalue=analogRead(RGBLDRpin); // 读取环境颜色值
delay(100); //延迟100毫秒
ambientvalue+=analogRead(RGBLDRpin); //再次读取环境颜色值
ambientvalue=ambientvalue >>1; // 求平均值
// 读取红色值
digitalWrite(RedLEDpin,1); //发出红光
delay(100); // 延迟100毫秒
redvalue=analogRead(RGBLDRpin); //读取红色值
digitalWrite(RedLEDpin,0); //关闭红光
redvalue=redvalue-ambientvalue; //减去环境颜色值,即为反射的红色值…… //同理,读取绿色值、蓝色值
//根据RGB值的比例来确定颜色
lightvalue=redvalue+greenvalue+bluevalue;
redvalue=redvalue*100/lightvalue; //红色值所占的百分比
if(redvalue>redThreshold) //如果红色值的比例超过了某个阈值,则 Serial.println(" =red= "); //为红色,并通过串口输出
程序三:测试传感器是否正常
pinMode(lsensor,INPUT); // 定义左传感器的对应管脚为输入模式
digitalWrite(lsensor,1); // 配置上拉电阻
if(digitalRead(lsensor)==0) // 如果检测到障碍,则读取的值为0,否则为1 {
}
程序四:测试小车能否正常运动
//设定轮子的速度和方向,检验其是否正常运动
pinMode(7,OUTPUT); // 7号管脚对应左轮子的方向
pinMode(9,OUTPUT); // 9号管脚对应左轮子的速度
digitalWrite(7, 1); // 设定左轮子的方向,1表示前进、0表示后退
analogWrite(9, 50); // 左轮子的速度值。