松下伺服驱动器故障报警内容和处理方法
松下伺服发生故障报警代码一览和对策

(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
按位置指令脉冲,检查电机是否转动。
使用电机转矩监视器检查功率转矩是否达到饱和。
调整增益。
设定Pr0.13(第1转矩限制),Pr5.22(第2转矩限制)为最大值。
如配线图所示进行编码器接线。
30
0
安全输入保护
安全输入1或安全输入2中至少一项的输入光电耦合器为OFF。
确认安全输入1,2的输入配线状态。
报警错误代码
(3)驱动器故障(回路故障)
(3)更换新的驱动器。
12
0
过电压保护
逆变器P-N间电压超过规定值。
测量连接器(L1,L2,L3)的线间电压。
(1)电源电压超过允许输入电压范围。无功补偿电容器和UPS(无间断电源)造成的电压反弹。
(1)输入正确电压,拆除无功补偿电容器。
用测试仪测量驱动器端子P-B间外接的电阻值,如
1
松下伺服发生故障报警代码一览及对策

(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,那么需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,那么应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(2)电源容量缺乏…受主电源接通时的冲击电流影响,导致电源电压下降。
(2)提高电源容量。
(3)缺相…应输入三相规格的驱动器实际以
单相电源运转。
(3)正确设定各相电源。
(4)驱动器故障(回路故障)
(3)电机电缆接地。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,那么需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,那么应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
辅助码
保护功能
原因
对策
33
0
I/F输入重复分配异常1保护
输入信号(SI1,SI2,SI3,SI4,SI5)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
1
I/F输入重复分配异常2保护
输入信号(SI6,SI7,SI8,SI9,SI10)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
松下伺服发生故障报警代码一览和对策
(1)负载过重,有效转矩超过额定转矩,长时间持续运转。
(1)加大驱动器,电机的容量。延长加减速时间,降低负载。
(2)增益调整不良导致振荡,振动。电机出现振动,异常声音。Pr0.04(惯量比)的设定值异常。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
(4)更换新的驱动器。
13
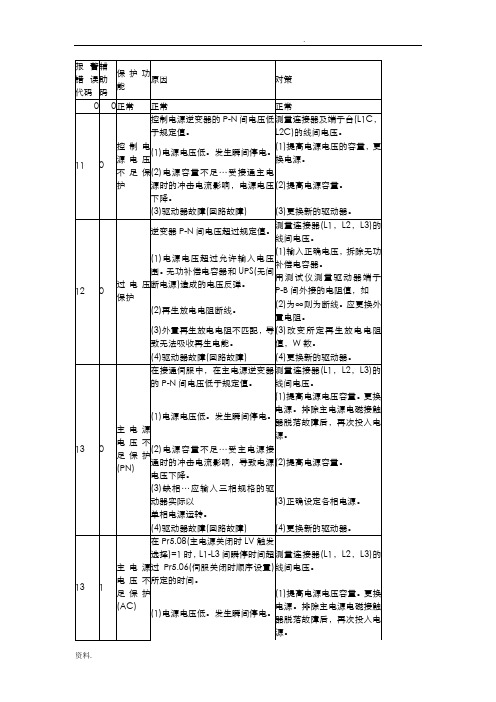
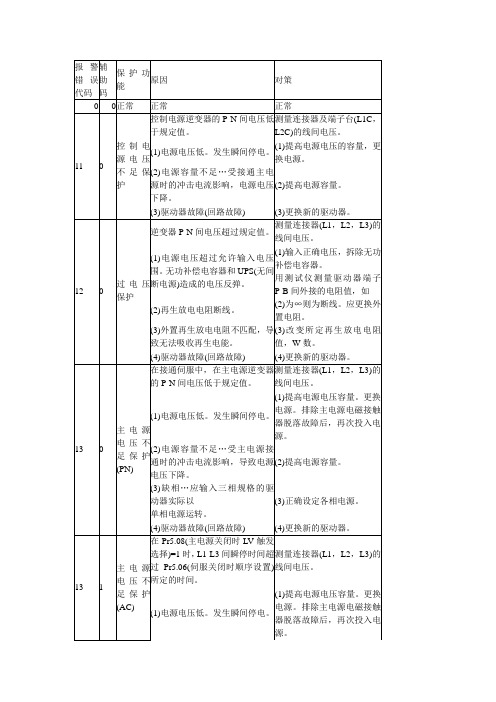
1
主电源电压不足保护(AC)
在Pr5.08(主电源关闭时LV触发选择)=1时,L1-L3间瞬停时间超过Pr5.06(伺服关闭时顺序设置)所定的时间。
测量连接器(L1,L2,L3)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(3)电机电缆接地。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
(2)重新调整增益。
(3)电机布线错误,断线。
松下伺服发生故障报警代码一览和对策

7
INH分配异常
指令脉冲禁止输入功能分配到输入信号SI10之外。
请正确设定针对连接器引线的功能分配。
34
0
电机可动范围设定异常保护
针对位置指令输入范围,电机超过(电机可动范围设定)所设定的电机动作可能范围。
检查电机是否转动。
(1)增益不恰当。
(1)确认增益(位置环增益和速度环增益的平衡),惯量比。
15
0
过热保护
驱动器散热器,功率元件的温度超过规定值以上。
(1)驱动器的使用温度超过规定值。
(1)降低驱动器使用温度及改善冷却条件。
(2)过载。
(2)提高驱动器,电机的容量。延长加减速时间。降低负载。
报警错误代码
辅助码
保护功能
原因
对策
16
0
过载保护(过载保护)
转矩指令值超过(过载等级设置)设定的过载水平时,根据后述时限特性激活过载保护。
报警错误代码
辅助码
保护功能
原因
对策
0
0
正常
正常
正常
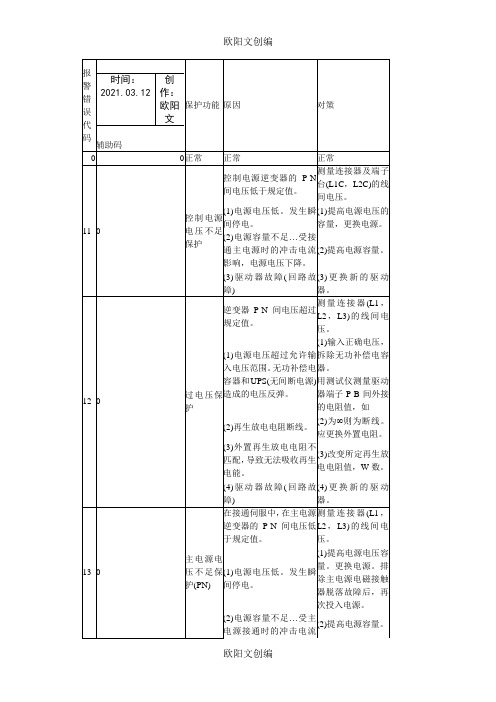
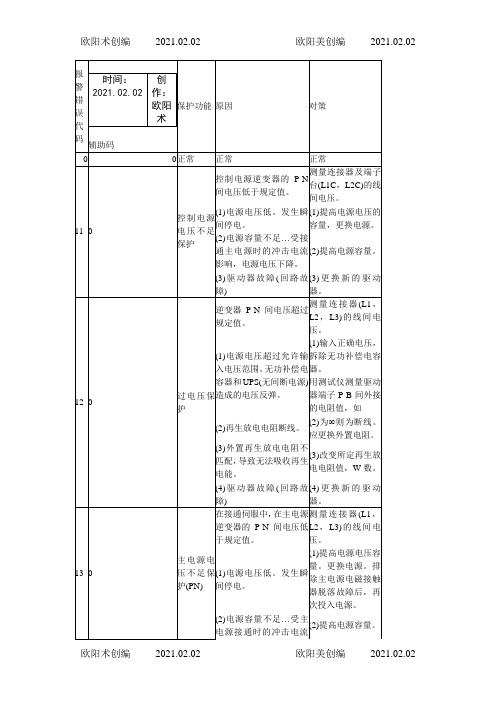
11
0
控制电源电压不足保护
控制电源逆变器的P-N间电压低于规定值。
测量连接器及端子台(L1C,L2C)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压的容量,更换电源。
(2)电源容量不足…受接通主电源时的冲击电流影响,电源电压下降。
(2)提高电源容量。
输出信号(SO1,SO2,SO3)的有在功能分配中未定义编号。
请正确设定针对连接器引线的功能分配。
33
5
I/F输出功能号码异常2
输出信号(SO4,SO5,SO6)的有在功能分配中未定义编号。
松下伺服驱动器故障报警内容和处理方法

松下伺服驱动器故障报警内容和处理方法在工业自动化领域,松下伺服驱动器以其出色的性能和稳定性得到了广泛的应用。
然而,在使用过程中,难免会遇到各种故障报警情况。
了解这些故障报警的内容以及掌握相应的处理方法,对于确保设备的正常运行和提高生产效率至关重要。
一、松下伺服驱动器常见的故障报警内容1、过电流报警(OC)当驱动器检测到电机电流超过设定的允许值时,会触发过电流报警。
这可能是由于电机过载、短路、驱动器故障或参数设置不当等原因引起的。
2、过电压报警(OV)电源电压过高或者在制动过程中产生的再生能量无法及时释放,都可能导致过电压报警。
3、欠电压报警(UV)供电电源电压过低,无法满足驱动器的正常工作要求,就会出现欠电压报警。
4、编码器故障报警(ENC)编码器是用于反馈电机位置和速度信息的重要部件。
如果编码器出现损坏、连接不良或信号干扰等问题,驱动器会发出编码器故障报警。
5、过热报警(OH)驱动器内部温度过高,可能是由于环境温度过高、散热不良、长时间过载运行等原因造成的。
6、位置偏差过大报警(Pd)当实际位置与指令位置的偏差超过设定的允许值时,会触发位置偏差过大报警。
7、速度偏差过大报警(Sv)实际速度与指令速度的偏差超出了规定范围,导致速度偏差过大报警。
8、通信故障报警(COM)驱动器与控制器之间的通信出现异常,例如通信线路中断、通信协议不匹配等。
二、松下伺服驱动器故障报警的处理方法1、过电流报警(OC)处理方法(1)首先检查电机是否过载,如果是,减轻负载或更换更大功率的电机。
(2)检查电机和驱动器之间的连接线路是否短路,修复或更换短路的线路。
(3)确认驱动器的参数设置是否正确,特别是电流限制相关的参数。
(4)如果驱动器故障,需要维修或更换驱动器。
2、过电压报警(OV)处理方法(1)检查电源电压是否过高,如果过高,调整电源电压至正常范围。
(2)优化制动参数,确保再生能量能够及时释放。
可以考虑增加制动电阻或使用能量回馈装置。
松下伺服发生故障报警代码一览及对策之欧阳文创编
将屏蔽线接入FG。
23
0
编码器通信数据异常保护
编码器的数据通讯无异常,但数据内容异常。编码器的数据通信异常。
确保编码器电源电压为DC5V±5%(4.75〜5.25V)。尤其在编码器线缆较长时需特别注意。
主要因噪音引起的数据异常。虽与编码器连接,但通信数据异常。
15
0
过热保护
驱动器散热器,功率元件的温度超过规定值以上。
(1)驱动器的使用温度超过规定值。
(1)降低驱动器使用温度及改善冷却条件。
(2)过载。
(2)提高驱动器,电机的容量。延长加减速时间。降低负载。
报警错误代码
辅助码
保护功能
原因
对策
16
0
过载保护(过载保护)
转矩指令值超过Pr5.12(过载等级设置)设定的过载水平时,根据后述时限特性激活过载保护。
(2)再生放电电阻断线。
(2)为∞则为断线。应更换外置电阻。
(3)外置再生放电电阻不匹配,导致无法吸收再生电能。
(3பைடு நூலகம்改变所定再生放电电阻值,W数。
(4)驱动器故障(回路故障)
(4)更换新的驱动器。
13
0
主电源电压不足保护(PN)
在接通伺服中,在主电源逆变器的P-N间电压低于规定值。
测量连接器(L1,L2,L3)的线间电压。
辅助码
保护功能
原因
对策
33
0
I/F输入重复分配异常1保护
输入信号(SI1,SI2,SI3,SI4,SI5)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
1
I/F输入重复分配异常2保护
松下伺服发生故障报警代码一览及对策

3
波形生成异常
指令脉冲值急速变化。
改小加速度、减速度的设定。
28
0
脉冲再生界限保护
脉冲再生的输出频率数超过界限。
检查Pr0.11(电机每旋转1次的输出脉冲数),Pr5.03(脉冲输出分频分母)的设定值。
将检测置于无效时,请将Pr5.33(脉冲再生输出界限设定)置于0。
29
0
偏差计数溢出保护
按位置指令脉冲,检查电机是否转动。
在起动负载时,检查电机位置(编码器反馈值)的变化与负载位置(光栅尺反馈值)的变化为相同符号。
检查光栅尺分频分子(Pr3.24),分母(Pr3.25),光栅尺方向反转(Pr3.26)是否设定正确。
26
0
过速度保护
电机的转速超过Pr5.13(过速度等级设置)的设定值。
避免过大速度指令。
检查指令脉冲的输入频率及分频,递增比。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(2)电源容量不足…受主电源接通时的冲击电流影响,导致电源电压下降。
(2)提高电源容量。
(3)缺相…应输入三相规格的驱动器实际以
单相电源运转。
(3)正确设定各相电源。
(4)驱动器故障(回路故障)
(2)提高电源容量。
(3)驱动器故障(回路故障)
(3)更换新的驱动器。
12
0
过电压保护
逆变器P-N间电压超过规定值。
测量连接器(L1,L2,L3)的线间电压。
(1)电源电压超过允许输入电压范围。无功补偿电容器和UPS(无间断电源)造成的电压反弹。
(1)输入正确电压,拆除无功补偿电容器。
松下伺服发生故障报警代码一览及对策

测量连接器(L1,L2,L3)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(2)电源容量不足…受主电源接通时的冲击电流影响,导致电源电压下降。
(2)提高电源容量。
(3)缺相…应输入三相规格的驱动器实际以单相电源运转。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(2)发生瞬间停电。
(2)尝试将Pr5.09(主电源关闭检测时间)设定延长。正确设定各相电源。
(2)电源容量不足…受主电源接通时的冲击电流影响,导致电源电压下降。
(3)提高电源容量。
(3)缺相…应输入三相规格的驱动器实际以
按布线图正确连接编码器线缆。
延长加减速时间。减轻负载,降低速度。
(2)Pr0.14(位置偏差过大设置)的数值过小。
(2)加大Pr0.14(位置偏差过大设置)设定值。
24
1
速度偏差过大保护
内部位置指令速度与实际速度的差(速度偏差)超过Pr6.02(速度偏差过大设置)的设定。
将内部位置指令速度的加减速时间变长,或通过增益调整来提高追随性。
(2)电机转速过高,无法在规定减速时间内完全吸收再生能量。
(2)检查运转模式(速度监视器)。检查再生放电电阻负载率及过再生警报显示,提高电机,驱动器容量,延长减速时间。降低电机转速。外置再生放电电阻。
(3)外附电阻动作极限被限制为10%负载率。
(3)设定Pr0.16(再生放电电阻外置选择)为2。
18
1
再生晶体管异常保护
伺服驱动器的再生驱动用晶体管故障。
松下伺服发生故障报警代码一览及对策

1
IPM異常保護
在逆变器上流动电流超过规定值。
检查电机电缆是否短路等。
(1)驱动器故障(回路,IGBT部件不良)
(1)拆除电机电缆,接通伺服,如果立即发生故障,则需更换新的驱动器。
(2)电机电缆U,V,W短路。
(2)检查电机电缆连接U,V,W是否短路,连接器导线是否有毛刺等。正确连接电机电缆。
(3)电机电缆接地。
将屏蔽线接入FG。
报警错误代码
辅助码
保护功能
原因
对策
24
0
位置偏差过大保护
位置偏差脉冲超过(位置偏差过大设置)的设定。
检查电机是否转动。
(1)电机未按指令动作。
(1)按位置指令脉冲,检查电机是否转动。
确认转矩监控器的输出转矩未达到饱和。
调整增益。将(第1转矩限制),(第2转矩限制)设定为最大值。
按布线图正确连接编码器线缆。
原因
对策
33
0
I/F输入重复分配异常1保护
输入信号(SI1,SI2,SI3,SI4,SI5)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
1
I/F输入重复分பைடு நூலகம்异常2保护
输入信号(SI6,SI7,SI8,SI9,SI10)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
2
如果电机电缆与编码器线捆扎在一起,请分开布线。
将屏蔽线接入FG。
23
0
编码器通信数据异常保护
编码器的数据通讯无异常,但数据内容异常。编码器的数据通信异常。
确保编码器电源电压为DC5V±5%〜。尤其在编码器线缆较长时需特别注意。
主要因噪音引起的数据异常。虽与编码器连接,但通信数据异常。
松下伺服发生故障报警代码一览及对策

(4)正确连接电源的各相(L1,L2,L3)。单相100V及单相200v时,请使用L1,L3。
(4)驱动器故障(回路故障)
(5)更换新的驱动器。
14
0
过电流保护
在逆变器上流动电流超过规定值。
检查电机电缆是否短路等。
(1)驱动器故障(回路,IGBT部件不良)
(1)拆除电机电缆,接通伺服,如果立即发生故障,则需更换新的驱动器。
如果电机电缆与编码器线捆扎在一起,请分开布线。
将屏蔽线接入FG。
23
0
编码器通信数据异常保护
编码器的数据通讯无异常,但数据内容异常。编码器的数据通信异常。
确保编码器电源电压为DC5V±5%(4.75〜5.25V)。尤其在编码器线缆较长时需特别注意。
主要因噪音引起的数据异常。虽与编码器连接,但通信数据异常。
(1)输入正确电压,拆除无功补偿电容器。
用测试仪测量驱动器端子P-B间外接的电阻值,如
(2)再生放电电阻断线。
(2)为∞则为断线。应更换外置电阻。
(3)外置再生放电电阻不匹配,导致无法吸收再生电能。
(3)改变所定再生放电电阻值,W数。
(4)驱动器故障(回路故障)
(4)更换新的驱动器。
13
0
主电源电压不足保护(PN)
1
再生晶体管异常保护
伺服驱动器的再生驱动用晶体管故障。
更换驱动器。
21
0
编码器通讯断线异常保护
编码器和驱动器的通信,在达到一定次数后中断,激活断线检测功能。
接线图所示正确连接编码器线路。
纠正连接器插头的错误连线。
21
1
编码器通信异常保护
主要因噪音引起的数据异常。虽与编码器连接,但通信数据异常。
松下伺服发生故障报警代码一览与对策
(7)电机与驱动器不匹配。
(7)检查铭牌所示电机,驱动器型号(容量),更换匹配驱动器的电机。
(8)脉冲输入和接通伺服时序为同步,或脉冲输入过快。
(8)接通伺服100ms以后,再输入脉冲。
(9)动态制动器电路过热。
(9)请勿用伺服On/Off作为运转、停止使用。高速运转时请设置动态制动器动作的停止时间为3分钟左右。
(2)再生放电电阻断线。
(2)为∞则为断线。应更换外置电阻。
(3)外置再生放电电阻不匹配,导致无法吸收再生电能。
(3)改变所定再生放电电阻值,W数。
(4)驱动器故障(回路故障)
(4)更换新的驱动器。
13
0
主电源电压不足保护(PN)
在接通伺服中,在主电源逆变器的P-N间电压低于规定值。
测量连接器(L1,L2,L3)的线间电压。
以PANATERM的波形图形画面检查转矩(电流)波形是否发生振荡,是否上下晃动过大。通过PANATERM检查过载警报显示及负载率。
(1)负载过重,有效转矩超过额定转矩,长时间持续运转。
(1)加大驱动器,电机的容量。延长加减速时间,降低负载。
(2)增益调整不良导致振荡,振动。电机出现振动,异常声音。Pr0.04(惯量比)的设定值异常。
(6)更换驱动器。请勿通过接通,切断伺服进行运转,停止操作。
(7)电机与驱动器不匹配。
(7)检查铭牌所示电机,驱动器型号(容量),更换匹配驱动器的电机。
(8)脉冲输入和接通伺服时序为同步,或脉冲输入过快。
(8)接通伺服100ms以后,再输入脉冲。
(9)动态制动器电路过热。
(9)请勿用伺服On/Off作为运转、停止使用。高速运转时请设置动态制动器动作的停止时间为3分钟左右。
松下伺服发生故障报警代码一览与对策

(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
在起动负载时,检查电机位置(编码器反馈值)的变化与负载位置(光栅尺反馈值)的变化为相同符号。
检查光栅尺分频分子(Pr3.24),分母(Pr3.25),光栅尺方向反转(Pr3.26)是否设定正确。
26
0
过速度保护
电机的转速超过Pr5.13(过速度等级设置)的设定值。
避免过大速度指令。
检查指令脉冲的输入频率及分频,递增比。
14
1
IPM異常保護
在逆变器上流动电流超过规定值。
检查电机电缆是否短路等。
(1)驱动器故障(回路,IGBT部件不良)
(1)拆除电机电缆,接通伺服,如果立即发生故障,则需更换新的驱动器。
(2)电机电缆U,V,W短路。
(2)检查电机电缆连接U,V,W是否短路,连接器导线是否有毛刺等。正确连接电机电缆。
(3)电机电缆接地。
辅助码
保护功能
原因
对策
33
0
I/F输入重复分配异常1保护
输入信号(SI1,SI2,SI3,SI4,SI5)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
1
I/F输入重复分配异常2保护
输入信号(SI6,SI7,SI8,SI9,SI10)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
松下伺服驱动器报警代码大全

松下伺服驱动器报警代码大全松下伺服驱动器是工业自动化领域中常见的一种设备,它具有高精度、高速度和高可靠性的特点,被广泛应用于各种自动化设备中。
然而,在使用过程中,我们有时会遇到各种报警代码,这些代码对于及时排除故障、保障设备正常运行至关重要。
因此,了解松下伺服驱动器的报警代码以及相应的解决方法显得尤为重要。
1. AL01,电源电压过低。
当松下伺服驱动器显示AL01报警代码时,意味着电源电压过低。
解决方法是首先检查电源线路是否正常连接,然后检查电源供电是否稳定,如有必要,可以更换稳压器或者更换电源线路。
2. AL02,电源电压过高。
AL02报警代码表示电源电压过高,这可能会对伺服驱动器造成损坏。
解决方法是检查电源线路是否正常,排除电源电压过高的原因,必要时使用稳压器进行调节。
3. AL03,过流保护。
当伺服驱动器出现AL03报警代码时,意味着发生了过流保护。
解决方法是检查驱动器输出负载是否正常,检查电机是否有堵转现象,必要时检查驱动器的参数设置是否合理。
4. AL04,过载保护。
AL04报警代码表示发生了过载保护,解决方法是检查负载是否正常,检查传动部件是否有卡滞现象,必要时检查伺服驱动器的参数设置。
5. AL05,过热保护。
当伺服驱动器显示AL05报警代码时,意味着发生了过热保护。
解决方法是检查散热器是否通风良好,及时清理散热器上的灰尘,必要时更换散热器或者增加散热风扇。
6. AL06,编码器故障。
AL06报警代码表示编码器出现故障,解决方法是检查编码器连接是否良好,检查编码器线路是否正常,必要时更换编码器。
7. AL07,通信故障。
当伺服驱动器出现AL07报警代码时,意味着发生了通信故障。
解决方法是检查通信线路是否正常连接,检查通信参数设置是否正确,必要时更换通信线路或者重新设置通信参数。
8. AL08,其他故障。
AL08报警代码表示发生了其他故障,解决方法是通过故障代码手册进行详细排查,根据具体情况进行处理。
松下伺服驱动器故障报警内容和处理方法

松下伺服驱动器故障报警内容和处理方法代码:11保护功能:控制电源欠电压故障原因:控制电源逆变器上P、N间电压低于规定值。
1)交流电源电压太低。
瞬时失电。
2)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1C、L2C和r、t之间电压。
1)提高电源电压。
更换电源。
2)增大电源容量。
3)请换用新的驱动器。
代码:12保护功能:过电压故障原因:电源电压高过了允许输入电压的范围。
逆变器上P、N 间电压超过了规定值。
电源电压太高。
存在容性负载或UPS(不间断电源),使得线电压升高。
1)未接再生放电电阻。
2)外接的再生放电电阻不匹配,无法吸收再生能量。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2和L3之间的相电压。
配备电压正确的电源。
排除容性负载。
1)用电表测量驱动器上P、B间外接电阻阻值。
如果读数是“∞”,说明电阻没有真正地接入。
请换一个。
2)换用一个阻值和功率符合规定值的外接电阻。
3)请换用新的驱动器。
代码:13保护功能:主电源欠电压故障原因:当参数Pr65(主电源关断时欠电压报警触发选择)设成1时,L1、L3相间电压发生瞬时跌落,但至少是参数Pr6D(主电源关断检测时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N间相电压下降到规定值以下。
1)主电源电压太低。
发生瞬时失电。
2)发生瞬时断电。
3)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
4)缺相:应该输入3相交流电的驱动器实际输入的是单相电。
5)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2、L3端子之间的相电压。
1)提高电源电压。
换用新的电源。
排除电磁继电器故障后再重新接通电源。
2)检查Pr6D设定值,纠正各相接线。
3)请参照“附件清单”,增大电源容量。
4)正确连接电源的各相(L1、L2、L3)线路。
单相电源请只接L1、L3端子。
5)请换用新的驱动器。
代码:15保护功能:电机和驱动器过热故障原因:伺服驱动器的散热片或功率器件的温度高过了规定值。
松下伺服发生故障报警代码一览和对策

(3)电机布线错误,断线。
(3)按布线图正确连接电机线路。更换电缆。
(4)机械受到碰撞,突然负载变重,发生扭转缠绕。
(4)排除缠绕因素。减轻负载。
(5)电磁制动器处于动作状态。
(5)测量制动器端子的电压。断开制动器。
(6)在复数台机械布线中,误将电机电缆连接到其它轴,错误布线。
(6)将电机电缆,编码器连线正确连接到各自的对应轴上。
输出信号(SO1,SO2,SO3)的有在功能分配中未定义编号。
请正确设定针对连接器引线的功能分配。
33
5
I/F输出功能号码异常2
输出信号(SO4,SO5,SO6)的有在功能分配中未定义编号。
请正确设定针对连接器引线的功能分配。
33
6
CL分配异常
计数器清除功能分配到输入信号SI7之外。
(3)电机电缆接地。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
辅助码
保护功能
原因
对策
33
0
I/F输入重复分配异常1保护
输入信号(SI1,SI2,SI3,SI4,SI5)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
1
I/F输入重复分配异常2保护
输入信号(SI6,SI7,SI8,SI9,SI10)的功能分配有重复设定。
松下伺服驱动器故障报警内容和处理方法之欧阳学文创编

松下伺服驱动器故障报警内容和处理方法欧阳歌谷(2021.02.01)代码:11保护功能:控制电源欠电压故障原因:控制电源逆变器上P、N间电压低于规定值。
1)交流电源电压太低。
瞬时失电。
2)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1C、L2C和r、t之间电压。
1)提高电源电压。
更换电源。
2)增大电源容量。
3)请换用新的驱动器。
代码:12保护功能:过电压故障原因:电源电压高过了允许输入电压的范围。
逆变器上P、N间电压超过了规定值。
电源电压太高。
存在容性负载或UPS(不间断电源),使得线电压升高。
1)未接再生放电电阻。
2)外接的再生放电电阻不匹配,无法吸收再生能量。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2和L3之间的相电压。
配备电压正确的电源。
排除容性负载。
1)用电表测量驱动器上P、B间外接电阻阻值。
如果读数是“∞”,说明电阻没有真正地接入。
请换一个。
2)换用一个阻值和功率符合规定值的外接电阻。
3)请换用新的驱动器。
代码:13保护功能:主电源欠电压故障原因:当参数Pr65(主电源关断时欠电压报警触发选择)设成1时,L1、L3相间电压发生瞬时跌落,但至少是参数Pr6D(主电源关断检测时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N间相电压下降到规定值以下。
1)主电源电压太低。
发生瞬时失电。
2)发生瞬时断电。
3)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
4)缺相:应该输入3相交流电的驱动器实际输入的是单相电。
5)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2、L3端子之间的相电压。
1)提高电源电压。
换用新的电源。
排除电磁继电器故障后再重新接通电源。
2)检查Pr6D设定值,纠正各相接线。
3)请参照“附件清单”,增大电源容量。
4)正确连接电源的各相(L1、L2、L3)线路。
单相电源请只接L1、L3端子。
松下伺服发生故障报警代码一览及对策之欧阳术创编
3
波形生成异常
指令脉冲值急速变化。
改小加速度、減速度的设定。
28
0
脉冲再生界限保护
脉冲再生的输出频率数超过界限。
检查Pr0.11(电机每旋转1次的输出脉冲数),Pr5.03(脉冲输出分频分母)的设定值。
将检测置于无效时,请将Pr5.33(脉冲再生输出界限设定)置于0。
29
0
偏差计数溢出保护
编码器脉冲标准的位置偏差值,或者,光栅尺标准的全闭环偏差值超过2^29(536870912)。
在起动负载时,检查电机位置(编码器反馈值)的变化与负载位置(光栅尺反馈值)的变化为相同符号。
检查光栅尺分频分子(Pr3.24),分母(Pr3.25),光栅尺方向反转(Pr3.26)是否设定正确。
26
0
过速度保护
电机的转速超过Pr5.13(过速度等级设置)的设定值。
避免过大速度指令。
检查指令脉冲的输入频率及分频,递增比。
请将Pr6.02(速度偏差过大设置)的设定值变大。或将Pr6.02设定为0而速度偏差过大检测置于无效时,请将Pr6.02置于0。
25
0
混合偏差过大保护
在全闭环控制时,光栅尺的负载位置与编码器的电机位置不符,超过Pr3.28(混合偏差过大设置)所设定的脉冲数。
检查电机与负载的连接。
检查光栅尺与驱动器的连接。
(4)驱动器故障(回路故障)
(5)更换新的驱动器。
14
0
过电流保护
在逆变器上流动电流超过规定值。
检查电机电缆是否短路等。
(1)驱动器故障(回路,IGBT部件不良)
(1)拆除电机电缆,接通伺服,如果立即发生故障,则需更换新的驱动器。
(2)电机电缆U,V,W短路。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
松下伺服驱动器故障报警内容和处理方法
代码:11
保护功能:控制电源欠电压
故障原因:控制电源逆变器上P、N间电压低于规定值。
1)交流电源电压太低。
瞬时失电。
2)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1C、L2C和r、t之间电压。
1)提高电源电压。
更换电源。
2)增大电源容量。
3)请换用新的驱动器。
代码:12
保护功能:过电压
故障原因:电源电压高过了允许输入电压的范围。
逆变器上P、N间电压超过了规定值。
电源电压太高。
存在容性负载或UPS(不间断电源),使得线电压升高。
1)未接再生放电电阻。
2)外接的再生放电电阻不匹配,无法吸收再生能量。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2和L3之间的相电压。
配备电压正确的电源。
排除容性负载。
1)用电表测量驱动器上P、B间外接电阻阻值。
如果读数是“∞”,说明电阻没有真正地接入。
请换一个。
2)换用一个阻值和功率符合规定值的外接电阻。
3)请换用新的驱动器。
代码:13
保护功能:主电源欠电压
故障原因:当参数Pr65(主电源关断时欠电压报警触发选择)设成1时,L1、L3相间电压发生瞬时跌落,但至少是参数Pr6D(主电源关断检测时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N间相电压下降到规定值以下。
1)主电源电压太低。
发生瞬时失电。
2)发生瞬时断电。
3)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
4)缺相:应该输入3相交流电的驱动器实际输入的是单相电。
5)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2、L3端子之间的相电压。
1)提高电源电压。
换用新的电源。
排除电磁继电器故障后再重新接通电源。
2)检查Pr6D设定值,纠正各相接线。
3)请参照“附件清单”,增大电源容量。
4)正确连接电源的各相(L1、L2、L3)线路。
单相电源请只接L1、L3端子。
5)请换用新的驱动器。
代码:15
保护功能:电机和驱动器过热
故障原因:伺服驱动器的散热片或功率器件的温度高过了规定值。
1)驱动器的环境温度超过了规定值。
2)驱动器过载了。
应对措施:
1)降低环境温度,改善冷却条件。
2)增大驱动器与电机的容量。
延长加/减速时间。
减轻负载。
代码:16
保护功能:过载
故障原因:转矩指令实际值超过参数Pr72设定的过载水平时,按照电机的过载保护时限特性,过载保护功能激活。
1)电机长时间重载运行,其有效转矩超过了额定值。
2)增益设置不恰当,导致振动或振荡。
电机出现震动或异常响声。
参数Pr20(惯量比)设得不正确。
3)电机电缆连接错误或断开。
4)机器碰到重物,或负载变重,或被缠绕住。
5)电磁制动器被接通制动(ON)。
6)多个电机接线时,某些电机电缆接错到了别的轴上。
应对措施:过载时间常数取决于电机特性。
用PANATERM波形图功能监测转矩(电流)的振荡或波动。
检查PANATERM上的过载报警显示内容和负载率。
1)增大驱动器与电机的容量。
延长加/减速时间。
减轻负载。
2)重新调整增益。
3)按照接线图,正确连接电机电缆。
4)清除缠绕物。
减轻负载。
5)测量施加到制动器上的电压。
断开其连接。
6)将电机电缆和编码器电缆正确的连接到对应的轴上。
再生放电电阻过载
代码:18
保护功能:再生放电电阻过载
故障原因:再生的能量超过了放电电阻的容量。
1)惯量很大的负载在减速过程中产生的能量抬高了逆变器电压,而且由于放电电阻无法有效的吸收再生能量而继续升高。
2)电机转速太高,无法在规定时间内吸收产生的再生能量。
3)外接电阻被限制为工作周期的10%。
应对措施:在PANATERM波形图上监测放电电阻负载率。
放电电阻不可以用来连续的再生制动1)检查运行状况(在速度监视器上)。
检查电阻负载率和过载报警显示内容。
增大驱动器与电机的容量。
延长加/减速时间。
外接一个电阻放电。
2)将参数Pr6C值设为2。
Pr6C设为2,首先要确保外接电阻有保护措施,比如采用了热熔断保险丝。
如果没有保护措施,放电电阻可能会过热,进而导致电机烧坏。