FESTO robotino_part_b
机器人系统介绍

抓手
机器人法兰面 (抓手安装面)
手指
工件
(2)吸着抓手
用途:工件装箱,工件排列等 构造:抓手内部真空,把工件吸着的构造
特点: ・不受工件外形影响。 ・抓手比较小。 ・可以快速取出小工件 ・有发生误差的可能性 真空发生器
机器人法兰面 (抓手安装面) 吸着抓手
工件
(3)复合抓手
用途:组装 构造:多手爪的构造,可以同时拿多个不同的工件。 特点:不用换抓手,可以迅速地工作。
水切割工具
控制箱
加工位置 [启动]
10.6 产品的自动化搬送
说明 机器人抓住托盘,接受传送带送来的产品。托盘配合工件的搬运速度,使工件在托盘上排列时不重复。
抓手
产品 [启动]
10.7 巧克力在传送带间的搬送
说明 使用视觉系统、检测到巧克力的位置。使用传送带追踪功能进行高速搬送。 使用3连的吸着抓手抓取工件。供料传送带根据机器人的动作,启动和停止。
8.装配机器人运动位置图
二.MITSUBISHI机器人
1.设备构成
2.操作面板说明
3.示教器按键说明
4.JOG操作
4.1 JOG画面
关节模式 各关节坐标
速度
4种运行模式
4.2 操作方法
4.3抓手的操作
5.机器人语言
6.用示教器进行程序输入与示教
程序输入
示教
7.RT Toolbox2 软件编程与仿真
浙江大学工程训练 ——工业机器人
FESTO
MITSUBISHI
BFP-A6096-*
目录
一.FESTO机器人介绍 二.MITSUBISHI机器人介绍
一.FESTO机器人
1、功能介绍
FESTO产品目录说明书

MDH-5/3…
1
1,200
G¼
2
2,300
Gy
3
4,000 …4,600 G½
24
–
24
–
4
Internet: /catalogue/...
Subject to change – 2012/05
Solenoid valves, ISO 5599-1
Product range overview
Type
Pilot air supply
Type of reset
internal
external
pneumatic spring
mechanical spring
Double solenoid valve with central plug M12x1
JMEBH
–
–
–
–
–
–
–
–
–
Double solenoid valve with central plug M12x1, with dominant signal
MFH-5/3…
37
MDH-5/3…
–
–
71
Solenoid valve with central plug M12x1
MEBH-5/3-…-…-ZSR
–
49
–
–
Solenoid valve with single plug M12x1, connector pin allocation to VDMA or Desina
Pneumatic working port on sub-base
Operating voltage
[V DC]
Festo 平行安装组件操作手册说明书

1适用文件遵守适用文件:–操作说明–电缸操作说明2安全2.1安全注意事项–仅允许将产品安装在处于安全状态的部件上。
–清洁轴。
联轴器轮毂[17] 只有夹紧在干燥且无润滑脂的轴颈上才不会打滑。
–保持联轴器轮毂校准[17]。
–如果电机松动或扭转,则必须在电缸上执行参考运行。
–选择所需的紧固件。
该组件包括最大要求的紧固件。
–遵守拧紧扭矩。
如果没有特别说明,则公差为 ±20%。
2.2按规定使用2.2.1用途平行安装组件并排连接电缸和电机。
2.2.2许用的电缸和电机•由接口代码推导出轴和电机。
示例:EAMM-U-...-T42-60PT42:电缸接口60P:电机接口表格 1:许用的电缸表格 2:许用的电机2.3专业人员的资质关于产品的一切工作仅允许由具备资质的专业人员进行,这些专业人员对工作进行评估并识别出危险。
专业人员经过机械方面的培训。
3其他信息–附件 è/catalogue。
4供货概述4.1供货范围插图 2:EAMM-U-...-67A 的补充5装配5.1组装5.1.1预安装转接板(EAMM-U-...-67A)插图 3:安装转接板•将转接板[40] 用螺钉[2] 固定在电机上。
5.1.2联轴器的预装配1.将滑环 [20] 装入电机侧联轴器轮毂 [17] 的槽 [K] 内。
2.拧开夹紧螺钉[16]。
插图 5:在电机侧推开联轴器轮毂•用合适的安装孔将联轴器轮毂 [17] 推到轴颈[C] 上。
插图 6:在电机侧校准联轴器轮毂1.遵守间距 (Y) è 5.1.3 对准联轴器。
2.拧紧电机侧夹紧螺钉[16]。
插图 7:安装电缸侧滑环•将滑环 [20] 装入电缸侧联轴器轮毂 [P] 的槽 [L] 内。
5.1.3对准联轴器5.1.4连接电机和电缸插图 9:安装电机侧齿形带盘1.将星形弹性体 [19] 以旋转钮 [M] 向外的方式插入齿形带盘 [15] 中。
2.将齿形带盘 [15] 连同星形弹性体 [19] 推到联轴器轮毂 [17] 的挡块处。
Festo 产品说明书.pdf_1705480633.1020026

Traduzione delle istruzioni originali 1Marcatura EXTab. 1 2Documentazione di riferimento validaIn altri documenti, i dati tecnici relativi al prodotto possono presentare valori diversi rispetto al presente documento. Per l'esercizio del prodotto in atmosfera esplosiva si deve fare riferimento in primo luogo ai dati tecnici del presente documento.Tutti i documenti disponibili sul prodotto si trovano sul sito è/pk.3Prodotti certificatiTipoTipoDFM12...B DFM32...B DFM16...B DFM40...B DFM20...B DFM50...B DFM25...BDFM63...BTab. 24FunzionamentoAlimentando le camere del cilindro il giogo si muove avanti ed indietro. La trasmissione di forze avviene mediante il movimento della piastra a giogo.5Sicurezza 5.1Avvertenze di sicurezza–Alle condizioni di esercizio indicate, l'unità può essere impiegata nelle zone 1e 2 a rischio di esplosione per la presenza di atmosfere gassose.–Eseguire tutti i lavori al di fuori delle zone a rischio di esplosione.–Mettere in funzione l'unità utilizzando esclusivamente un fluido di servizioadeguato è Dati tecnici.–L'impiego di altri liquidi esula dalle modalità di uso consentite.5.2Impiego ammessoL'unità viene utilizzata per il trasporto di masse e per la trasmissione di forze.6Montaggio A causa di un'installazione errata, possono verificarsi temperature elevate sulle bronzine. Le superfici calde possono creare una atmosfera esplosiva.•Provvedere ad avere una superficie di montaggio piana.•Installare l'unità in modo adeguato.•Evitare il danneggiamento delle aste di guida.7Messa in servizio La scarica di cariche elettrostatiche presenti su alcuni componenti può dare origine a scintille infiammabili.•Evitare la carica elettrostatica mediante opportune misure di installazione epulizia.•Includere l’apparecchio nella compensazione equipotenziale dell’impianto.Aspirare l'aria compressa fuori da atmosfere a rischio di esplosioni. Aerosol nell'aria compressa possono generare cariche elettrostatiche.Metodo di protezione contro l'accensione: c (sicurezza costruttiva)–Considerare l'etichetta dei dati identificativi del prodotto.8Manutenzione e cura–Verificare regolarmente la funzionalità dell'unità. Intervallo: 2 milioni di cicli di movimento o al più tardi dopo 6 mesi.In caso di impiego dell'unità in ambiente inquinato o umido, la durata utile delle guide è minore.–Verificare la funzionalità delle aste di guida e del supporto a intervalli più ravvicinati secondo le condizioni ambientali.9Eliminazione dei guastiAnomalia di funzionamentoRimedioDanni esterni rilevati durante l'ispezione visivaSostituire l'unitàPerdita udibileSostituire l'unitàNessuna sede fissa di fissaggioSerrare le viti di fissaggio Il giogo si sposta violentemente nella posizione terminaleRispettare i valori limite /Sostituire l'unitàResidui di lubrificante asciutti e saldamente attaccati sullo steloPulire lo stelo con una spugna morbida /Sostituire l'unitàComportamento di marcia irregolareRegolare l'aria di scarico con i regolatori di portata unidirezionale /Sostituire l'unitàGraffi longitudinali sullo steloSostituire l'unitàDeterioramento della qualità delle guide dovuto all'elevato gioco del supporto sul giogo Sostituire l'unitàRumorosità aumentataSostituire l'unitàTab. 3La sostituzione dei pezzi di usura e delle parti di ricambio è possibile in singoli casi. Le riparazioni di questo tipo possono essere eseguite solo da personale specializzato formato e autorizzato.–Contattare il consulente specializzato Festo.10Dati tecniciCondizioni d’esercizioTemperatura ambiente [°C]–20 £ T a £ +70Temperatura del fluido [°C]–20 £ T a £ +70Pressione d'esercizio [bar]10Fluido di lavoro Aria compressa a norma ISO 85731:2010 [5::]Posizione di montaggio qualsiasiVelocità max.Carico di coppia max.Energia di impatto nelle posizioni terminali max. ammissibileCarico utile max.è/catalogueLe leghe di alluminio utilizzate contengono meno del 7,5 % di magnesio (Mg).Tab. 48099854DFM-…-B-…-EX3-…Cilindro guidato8099854201811a [8099859]Festo SE & Co. KG Ruiter Straße 82 73734 Esslingen Germania+49 711 347。
FESTO 自动化系统产品参考手册说明书

13120220 e n 06/2017Your partner for process automationOperator levelSolenoid pilot valvesAccessoriesPositioners and SensorsActuatorsProcess and media valvesField level ControllersRemote I/OValve terminalsControl level Industry sectorsWater technologyBiotech/pharmaChemicalsFood andbeverageMining/mineralsEnergy/power stationsFluid powerFactory automationPulp and paperField automation componentsProcess Valve Units Customized SystemsAutomation ConceptsIntegrated ControllerCPX-CEC Modular ControllerCECX Compact ControllerCECC Integrated ControllerCDPX-CEC Front-End DisplayFED (pushbuttons)Front-End DisplayCDPX 4" (touchscreen)Front-End DisplayCDPX 7" (touchscreen)Front-End DisplayCDPX 10" (touchscreen)Front-End DisplayCDPX 13" (touchscreen)NAMUR Valve StandardVSNC-F8Specialty Valve Internal Pilot VOFCSpecialty Valve Direct ActingVOFDModular valve terminalCPX-P/MPAModular valve terminal CPX/MPACompactValve TerminalCPV Intrinsically Safe Valve TerminalCPV Ex-i StandardValve TerminalMPA/MPA-F Clean Design Valve TerminalMPA-C Cost Effective Valve TerminalVTUG VersatileValve TerminalVTSA/VTSA-FElectrical TerminalCPI Connecting BlockCAPCModular Electrical TerminalCPX Modular Electrical Terminal with NAMURCPX-POperator UnitCPX-MMI Digital Positioner CMSXSensor BoxHazardous LocationSRBEPressure Transmitter for Gases/LiquidsSPTWSensor Box StandardSRBCProximity Sensor for Linear ActuatorsSME/SMTPressure Sensor for Gases/LiquidsSPAWControlled Linear Actuator Servo-Pneumatic DFPIQuarter-Turn ActuatorDFPDQuarter-Turn Actuator Stainless SteelDAPS-CR Quarter-Turn Actuator with Handwheel DAPS-MW Linear Actuator PneumaticDLP Compressed AirReservoirsService Units CouplingsFDA ApprovedPlastic TubingPush-in Fittings Knife Gate ValveVZKAButterfly ValveVZAVPinch Valve VZQASanitary Ball ValveVZBDAngle Seat ValveVZXA/VZXFDirect-Acting ValveVZWDPiloted ValveVZWMForce-Piloted ValveVZWFPulse Valve VZWEBall valve VZBEQuarter turn actuator DFPD NAMUR valve VSNCSensor box SRBCControl desk for automated operation including pneumaticoperator panelCustomized control cabinet solution, also for the ATEXzonePneumatic operator panelQuarter turn actuator DAPSwith butterfly valve VZAFValve control unit for disc anddouble-seated valvesQuarter turn actuator DAPSwith butterfly valve VZAVValve terminal CPV with stainless steel cover for theATEX zoneLinear actuator DLPwith knife gate valve VZKAUnits for high and lowtemperature applicationsFesto Designer Studio engineering design soft-ware for visualisationPLC development environmentBanjo ValveSensor Puck SRBGFlow Sensor for Liquids SFAWFlanged Ball Valve VZBFGeneral use Plastic Tubing NAMUR ValveHazardous Location VSNC - FNNPT Ball Valve VZBEBall valve with clampconnections VZBDQuarter turn actuator DFPD Digital positioner CMSXBall valve with weld connections VZBDQuarter turn actuator DFPD NAMUR valve VSNC PUCK Sensor SRBG。
费斯托 robotino 参数
费斯托 robotino 参数费斯托Robotino 是一款先进的机器人,具备多项功能和特点,为各种工作场景提供了便利和效率。
下面将以人类的视角来描述这款机器人的参数和优势。
一、外观与尺寸费斯托Robotino 的外观设计简洁大方,呈现出现代科技感。
它的尺寸适中,既能在狭小的环境中灵活行动,又能承载一定的负载,如零件、工具等。
二、动力与驱动Robotino 使用电池作为动力源,具备长时间连续工作的能力。
它采用全向轮驱动系统,能够在各种地形和狭小空间中自如移动,具备出色的机动性和灵活性。
三、感知与定位费斯托Robotino 配备了多种传感器,包括激光传感器、摄像头和红外传感器等。
这些传感器能够实时感知周围环境,精确获取目标物体的位置和距离信息,从而实现精准定位和避障功能。
四、导航与路径规划机器人导航是Robotino 的核心能力之一。
它能够通过自主学习和建模,快速了解工作环境,并根据任务需求进行路径规划和导航。
无论是在仓库、工厂还是实验室等场景中,Robotino 都能高效地完成指定路径的行走和定位任务。
五、载荷与操作费斯托Robotino 具备较强的载荷能力,可以携带和操作各种物体。
它的机械臂灵活可调,能够完成复杂的操作,如抓取、搬运和装配等。
无论是在生产线上还是在物流仓库中,Robotino 都能胜任各种操作任务,提高工作效率。
六、人机交互与通信Robotino 支持人机交互和远程通信。
它配备了高清摄像头和语音识别系统,能够识别和理解人类的指令,实现语音控制和交流。
同时,Robotino 还可以通过无线网络与其他设备和系统进行连接,实现远程监控和控制,提供更便捷的操作方式。
费斯托Robotino 是一款功能强大、灵活多变的机器人。
它的参数和优势使其在各个工作场景中都能发挥出色的作用,为人们提供了更高效、便捷的工作体验。
无论是在生产制造、物流仓储还是科研实验等领域,Robotino 都能成为人类的得力助手,为人们创造更多可能。
FESTO双工半旋钮驱动器DSM DSM-B产品介绍说明书

Semi-rotary drives DSM/DSM-B2d Internet: /catalogue/...Subject to change – 2022/10Semi-rotary drives DSM/DSM-BCharacteristicsAt a glance • Double-acting semi-rotary drive with vane• The swivel angle is infinitely adjustable over the entire swivel range • High precision thanks to metal fixed stops• Polyurethane ensures a long service life for the rotary vane and sealing system •Easy precision adjustment of the end positions using the cushioning components• The mechanical gearing between the stop element and the semi-rotary drive prevents movement of the stop system under load• Torques of up to 80 Nm with tandem rotary vanes in combination with multi-tooth shaftThe technology in detailSize 6 (10)32Size 12 (63)[1] Interface Choice of:– Spigot shaft – Flange shaft[2] Wide range of mounting options[3] Cushioning with size 6 ... 10: elastic cushioning components with metalfixed stop (P) Cushioning with size 12 ... 63: Three types of cushioning, with metal fixed stop:– Elastic cushioning components (P)– Adjustable, elastic cushioning components (P1)– Hydraulic shock absorbers (CC)[4] Position sensing– With size 6 ... 10: SME/SMT-10– With size 12 ... 40: SME/SMT-10 or SIEN – With size 63: SME/SMT-8[5] Precision adjustment of the end positions: the end positions can be veryaccurately adjusted by moving the stops[6] Angle scale: the required swivel angle can be easily preset using the scale [7] The cover cap prevents unwanted interference in the swivel motion andreduces the risk of injury32022/10 – Subject to changed Internet: /catalogue/...Semi-rotary drives DSM/DSM-BCharacteristicsWide choice of variantsDSM-T-...: semi-rotary drive with tandem rotary vanesTorques of up to 80 Nm can be achieved by having two rotary vanes on the multi-tooth shaft.The functionality corresponds to that of the DSM without tandem rotary vanes:• Infinitely adjustable swivel angle • Identical interfaces • Identical accessoriesDSM-...-HD: semi-rotary drive with heavy-duty bearingBacklash-free, preloaded, high-quality bearing elements allow very high load torques and very precise bearing with high running accuracy.The functionality corresponds to that of the DSM-B without heavy-duty bearing:• Infinitely adjustable swivel angle • Identical mounting interfaces • Identical accessoriesChoice of two cushioning types:• Cushioning P1 and CCSemi-rotary drives DSM/DSM-BProduct range overviewCharacteristic values of the semi-rotary drivesThe specifications shown in the tableare maximum values. The precisevalues for each of the sizes can befound in the relevant data sheet in thecatalogue.4d Internet: /catalogue/...Subject to change – 2022/10Semi-rotary drives DSM/DSM-B Product range overviewCharacteristic values of the semi-rotary drivesThe specifications shown in the tableare maximum values. The precisevalues for each of the sizes can befound in the relevant data sheet in thecatalogue.1)The cushioning type P1 can be ordered as an accessory (a page 53).2)The stop kit (adjustable swivel angle) can be ordered as an accessory (a page 54).3)The mounting kit (for position sensing) can be ordered as an accessory (a page 54).5 2022/10 – Subject to change d Internet: /catalogue/...6d Internet: /catalogue/...Subject to change – 2022/10Semi-rotary drives DSM/DSM-BCharacteristicsSize 12 (63)Via threaded through-holeVia through-hole Via thread, lateralCentring via centring collarSpecial mounting options for DSM-...-HDVia thread, lateralOf attachmentsPositive-locking connections possiblewhen using centring sleeves ZBH.Semi-rotary drives DSM/DSM-B CharacteristicsAccessoriesFree wheel unit FLSM Size 6 ... 40Push-on flange FWSRSize 6 (40)Mounting plate HSMSize 12 (40)Direction of rotation in combination with free wheel unit FLSMThe free wheel unit only allows movement in one of the two possible swivel directions of the semi-rotary drive DSM. The reverse direction is blocked.Dimensions and ordering data a page 49FLSM-...-R, right-hand (clockwise) rotationFLSM-...-L, left-hand (anticlockwise) rotation11[1] View towards drive shaftPosition sensor SRBSThe position sensor is used for sensing the end positions of semi-rotary drivesDSM.Sensing is done magnetically and contactless. Two switching points are output.Characteristics:• Quick assembly without having to manually search for switching points • Simple and reliable operation using one pushbutton• Only one connecting cable required• Long service life thanks to sturdy and non-contacting position sensing Technical data:• Possible sensing range: 0 ... 270°• Repetition accuracy: š 1°• 2 switching outputs (24 V)• Switching output: PNP or NPN programmable •Switching element function: N/O contact or N/C contact programmable7 2022/10 – Subject to change d Internet: /catalogue/...Semi-rotary drives DSMType codes DSM-6 (10)8d Internet: /catalogue/...Subject to change – 2022/10Semi-rotary drives DSM Peripherals overview DSM-6 (10)9 2022/10 – Subject to change d Internet: /catalogue/...Semi-rotary drives DSM Data sheet DSM-6 (10)Function -N- Size6 (10)1090, 180 or 2400 (200)3 (at 240°: 2 Hz)5.51) Theoretical values1)Note operating range of proximity switches1)The axis of rotation and the centre of the drive shaft are the point of reference for the forces2)Maximum value; please see graphs starting on a page 1210d Internet: /catalogue/...Subject to change – 2022/10MaterialsSectional viewwith spigot shaft with flange shaftDSM-...DSM-T-...DSM-...-FW DSM-T-...-FW 123240°180°90°16Function-N- Size12 (63)3240G1/8240 1) Restricted swivel angle in combination with sensor bracket SL-DSM-S-...1) Note operating range of proximity switches14235 21341) The axis of rotation and the centre of the drive shaft are the point of reference for the forces-NoteH-If the semi-rotary drives DSM-...-A-B are used without a stop system or the mass moments of inertia are exceeded, external stops must be used. A minimum radius relative to the drive shaft (r min) must be observed. The stop force mustnot exceed the maximum force.Axial eccentricity and concentricity of DSM-...-HDAxial eccentricity:Measured on the surface of the rotat-ing plate at the plate edge, when new.Concentricity:Measured at the centre of the rotatingplate, when new.Permissible dynamic load for DSM-...-HDPermissible axial force F x as a function of distance l Fxll [mm]F x [N ]5010015020025030050100150200250300350400450500550600l [mm]F x [N ]501001502002503000200400600800100012001400DSM-12-...-HD DSM-16-...-HD DSM-25-...-HDDSM-32-...-HD DSM-40-...-HD DSM-63-...-HDPermissible radial force F z as a function of distance lFz ll [mm]F z [N ]2040608010012050100150200250300350400450500550600l [mm]F z [N ]50100150200200400600800100012001400160018002000DSM-12-...-HD DSM-16-...-HD DSM-25-...-HDDSM-32-...-HD DSM-40-...-HD DSM-63-...-HD180°270°H--Note Engineering software for calculating inertiad Mass moment of inertia J as a function of swivel time tWith adjustable, elastic cushioning components (P1)DSM-12-270-P1DSM-16-270-P190°180°246°DSM-25-270-P1DSM-32-270-P190°180°246°DSM-40-270-P1DSM-63-270-P190°180°240°180°240°added in order to obtain the total swivel time.1)Included in the scope of delivery.Semi-rotary drives DSM-B Data sheet DSM-12 (63)1)Included in the scope of delivery.Semi-rotary drives DSM-B Data sheet DSM-12 (63)Semi-rotary drives DSM-B Data sheet DSM-12 (63)Semi-rotary drives DSM-B Data sheet DSM-12 (63)Semi-rotary drives DSM-B Data sheet DSM-12 (63)1)Thread for compressed air through-feed with size 12 (25)2)Thread for compressed air through-feed with size 32 (63)Semi-rotary drives DSM-B Data sheet DSM-12 (63)Semi-rotary drives DSM-B Data sheet DSM-12 (63)Semi-rotary drives DSM-B Data sheet DSM-12 (63)Semi-rotary drives DSM/DSM-B AccessoriesFree wheel unit FLSMfor size 6, 8Material:Housing: anodised aluminium Shaft, sleeve:Size 6, 8: steelSize 10: hardened steel H--NoteThe minimum possible rotation angle is 3°. However, the switching accura-cy is dependent on speed and load.1) Corrosion resistance class CRC 2 to Festo standard FN 940070Moderate corrosion stress. Indoor applications in which condensation can occur. External visible parts with primarily decorative surface requirements in direct contact with a normal industrial environment.Semi-rotary drives DSM/DSM-B AccessoriesFree wheel unit FLSMFor size 12 (40)Material:Housing: anodised aluminiumShaft, sleeve: hardened steel H--NoteThe minimum possible rotation angle is 3°. However, the switching accura-cy is dependent on speed and load.1) Corrosion resistance class CRC 2 to Festo standard FN 940070Moderate corrosion stress. Indoor applications in which condensation can occur. External visible parts with primarily decorative surface requirements in direct contact with a normal industrial environment.。
Festo 比例压力阀 VEAB 装配、安装和操作手册说明书

原版操作手册的译本适用文件è /pk。
用户文件名称,型号内容H 导轨安装件,VAME-P7-T装配说明书安装板,VAME-P...-Y装配说明书气路导轨,VABM-P6-15.../-P7-18...装配说明书Tab. 1 产品文件2安全2.1安全注意事项–仅在原装状态下使用产品,请勿擅自进行改动。
–请仅在技术状态完好的情况下使用本产品。
–注意使用地的环境条件。
–装配、安装和维修保养工作:关闭电源,确保不会重新启动。
2.2按规定使用按照规定,比例压力阀用于根据给定的设定点值按比例调节压力。
本产品设计用于工业领域。
2.3专业人员的资质仅允许由具备资质的专业人员进行安装、调试、保养及拆卸。
专业人员必须掌握电气和气动控制系统安装的专业知识。
3详细信息–附件 è /catalogue。
4服务若有技术问题,请联系 Festo 公司在您所在地的联系人 è 。
5产品概览5.1功能原理集成式压力传感器可感测到工作接口的压力,并将其与额定值进行比较。
在实际值和设定点值之间存在偏差时,阀将进行调节,直到输出压力达到设定点值。
Fig. 1 气动开关符号5.2结构5.2.1产品配置管式阀1LED 指示灯2电接口,M8 插头3工作气接口 (2)Fig. 2 前部视图1气源口 (1)2排气接口 (3)3用于固定阀的通孔 (3x)Fig. 3 后部视图板式阀1LED 指示灯2电接口,M8 插头3用于将阀固定在气路板上的通孔(2x)Fig. 4 前部视图1工作气接口 (2)2排气接口 (3)3气接口 (1)Fig. 5 底部视图8111244VEAB比例调压阀81112442019-08b[8111252]Festo AG & Co. KGRuiter Straße 8273734 Esslingen德国+49 711 347-05.2.2产品派生型特性型号代码说明基本功能VEAB 压电式比例压力阀L 管式阀阀类型B板式阀阀功能262x 两位三通阀,常闭D20 ... 2 bar D70 ... 1 bar D90 (6)bar D120 … 0.2 barD13–1 … 1 bar D14–1 … 0 bar D15–0.5 … 0.5 bar 压力范围D18–1 … 5 bar F 法兰/气路板气接口Q4快插接头 4 mm V1电压型 0 (10)V 设定点值输入和设定点值输出A4电流型 4 … 20 mA 额定工作电压124 V DC 电接口R1插头 M8,4 针Tab. 2 产品派生型6运输和存放–在干燥、防紫外线、防腐蚀的环境中存放本产品。
摆动模块DSMI-B Festo 2017-12d 操作手册说明书
中文–摆动模块DSMI-...-B(zh)操作指南80765562017-12d[8076564]DSMI-BFesto DSMI-B 2017-12d2原版操作手册的译本意思是:安装与调试必须由具备相应资质的专业人员按照操作手册来实施。
警告小心注意环境附件中文3...........................................................................DSMI-BFesto DSMI-B 2017-12d 中文3中文–摆动模块DSMI-...-B目录1工作部件和接口4..............................................2功能和应用5..................................................3运输和存放5..................................................4产品使用前提条件6.. (5)安装7........................................................机械安装7....................................................校准DSMI 的限位挡块9........................................借助外部限位挡块系统校准DSMI 11...............................气动安装12....................................................电气安装13. (6)调试15........................................................整套设备的调试15..............................................单机调试15....................................................7操作和运行19..................................................8维护和保养19.. (9)拆卸和维修20..................................................10附件20........................................................11故障排除21....................................................12技术数据21....................................................DSMI-BFesto DSMI-B 2017-12d 中文4产品文件有关产品的所有可用文件 /pk1工作部件和接口1驱动器的安装螺纹孔2输出轴3气接口4测量系统接口5配备锁紧螺母的调节套筒6接地接口的安装孔7由缓冲器座和调节套筒组成的限位挡块8角度刻度9六角孔aJ 用于选配护盖的卡环aA 止动杠杆,配备有用于位置感测的内置磁铁aB 缓冲器座止动螺丝Fig.1DSMI-B2功能和应用通过对气接口交替加压,实现壳体中内叶轮来回摆动。
Festo 电机驱动器操作手册说明书
原版操作手册的译本© 2020 Festo SE & Co. KG 保留一切权利1适用文件有关产品的所有文件 è/sp 产品的用户文件使用手册EMCA-EC-DIO-…设备及功能说明书;装配、安装、调试和诊断使用手册EMCA-EC-C-HP-…设备配置文件 FHPP (Festo Handling and Positioning Profile)的说明FCT 插件帮助EMCAFesto Configuration Tool (FCT) 的在线帮助,用于调试和参数设置专项文件EMCA-EC_UL-…根据 Underwriters Laboratories Inc. (UL) 认证在美国和加拿大使用本产品的要求Tab. 12安全–务必注意遵守产品相关文件和其它所用部件文件中的安全和警告注意事项。
–进行装配和安装工作之前,关闭供电电压并采取保护措施,防止其意外重新启动。
在彻底完成装配和安装工作之后,才能重新接通电源。
–禁止在带电情况下插拔插头。
–遵守有关静电敏感部件的操作规程。
–只有当正确安装驱动器并完成全部参数配置之后,才能启用控制器。
–不允许对本设备进行维修。
若损坏,则更换设备。
–除了外壳盖上的 4 颗螺钉,不得松开其他螺钉。
触碰炙热表面有烫伤危险。
接触壳体可能导致烫伤。
由此可能造成人员惊慌,并作出失控反应。
这还可能造成其他损失。
•避免意外触碰壳体。
•告知操作人员和维护人员可能存在的危险。
•进行维修工作之前:使驱动器冷却到 40 °C 以下。
快速旋转的电机轴具有较高的扭矩。
接触电机轴,可能会造成烫伤和擦伤。
•确保不会接触到旋转的电机轴和其上安装的部件。
产生气体,存在火灾危险。
清洁剂与驱动器的高温表面发生接触,可能会产生气体并着火。
•进行清洁工作之前,使驱动器冷却到室温。
2.1按规定使用按照规定,本产品用于驱动和控制机电驱动器。
本产品设计用于安装在机器中。
仅允许在以下情况下使用:–在技术性能完好的状态下–在未作擅自修改的初始状态下;仅允许使用产品随附文件中的扩展–在本产品技术参数规定的极限值内–在工业领域内除工业环境外,例如在商业和住宅混合区等,必须采取措施防止无线电干扰。
Festo 电机与轴操作手册.pdf_1705500741.4976394说明书

原版操作手册的译本1关于本文件适用文件产品所有相关文档è /pk。
–电机操作指南–轴操作指南2安全2.1安全注意事项–仅允许将产品安装在处于安全状态的部件上。
–清洁轴/空心轴。
联轴器只有夹紧在干燥且无润滑脂的轴表面上时才不会打滑。
–清洁 [1] 联轴器轮毂:–去除 [G] 外径夹紧销上的油脂。
为膨胀心轴椎体 [H] 润滑。
–去除夹紧孔的油脂。
–遵守 [1] 联轴器轮毂校准è 4.3.4 联轴器校准。
–为以下组合提供支撑è 4.4.1 轴-电机组合的支撑:–凸出的电机附件和重电机附件–强烈振动和振动/冲击负载–在每次松开或旋转电机后,进行轴的参照点运行。
–选择所需的紧固件。
该组件包括最大要求的紧固件。
–遵守拧紧力矩。
如果没有特别说明,则公差为 ± 20 %。
è 6 技术数据。
2.2按规定使用2.2.1使用轴与电机连接,电机与驱动轴呈轴向布置。
2.2.2许用的轴和电机过载将导致功能故障和财产损失。
电机的输出端变量不得超过所使用部件的许用数值。
许用数值è /catalogue。
•对电机输出端变量予以相应限制。
•由接口代码推导出轴和电机。
示例:EAMM-A-L48-70AL48:轴接口70A:电机接口轴接口轴1)L27EGC-50-...-TBL38EGC-70-...-TBL48EGC-80-...-TBL62EGC-120-...-TBL95EGC-185-...-TB,ELGA-TB- (1502)N38ELGA-TB-...-70N48ELGA-TB-...-80N80ELGA-TB-...-1201) 齿形带式电缸 EGC/ELGA2) ELGA-TB-...150 仅配备 EAMM-A-L95-…-G2Tab. 1电机接口电机1)55A EMMS-AS-55,外厂电机57A EMMS-ST-5757AA外厂电机电机接口电机1)58AA外厂电机60P EMMB/EMME/EMMT-AS-60, 外厂电机60PA外厂电机60RB外厂电机67A EMCA-EC-6770A EMMS-AS-70,外厂电机70AA外厂电机70AB外厂电机80P EMMB/EMME/EMMT-AS-80, 外厂电机82AA外厂电机84AA外厂电机87A EMMS-ST-8788A外厂电机90R外厂电机92RA外厂电机100A EMME/EMMS/EMMT-AS-100108AA外厂电机140A EMMS-AS-140190A EMMS-AS-1901) 伺服电机 EMM...-AS,步进电机 EMM...-ST,电机单元 EMCA-ECTab. 2用户应自行决定将外厂电机与合适的机械接口进行组合。
FESTO 产品目录.pdf_1705483892.3028948说明书

32
10
B3
B5
17,4
14,6
H4
H6
min.
max.
5
1,5
5,5
D1
M5
L1
L2
77,6
45
D4 @ 30,2
L3
40
D5 @
2,7
L4
W1
2,5
45°
d /catalogue/...
Dimensions – Polymer lever version, pneumatic connection M5, underneath
G1/8
H5
H6
L1
min.
max.
40,5
2
4
84,6
D3
D4
@
@
5,5
30,2
L2
L3
L4
60,5
54,5
3
D5 @ 3,3
W1
45°
d /catalogue/...
Dimensions – Polymer lever version, pneumatic connection G1/8, under
VHER-P-H-B43C-B-M5 VHER-P-H-B43E-B-M5 VHER-P-H-B43U-B-M5 VHER-P-H-B43C-M5 VHER-P-H-B43E-M5 VHER-P-H-B43U-M5 VHER-P-H-B43U-B-G18 VHER-P-H-B43E-B-G18 VHER-P-H-B43C-B-G18 VHER-P-H-B43U-G18 VHER-P-H-B43E-G18 VHER-P-H-B43C-G18 VHER-P-H-B43U-B-G14 VHER-P-H-B43C-B-G14 VHER-P-H-B43E-B-G14 VHER-P-H-B43E-G14 VHER-P-H-B43U-G14 VHER-P-H-B43C-G14 VHER-P-H-B43U-B-G12 VHER-P-H-B43E-B-G12 VHER-P-H-B43C-B-G12 VHER-P-H-B43C-G12 VHER-P-H-B43E-G12 VHER-P-H-B43U-G12
FESTO IO-Link 产品说明书

All set for automation with IO-Link®Point-to-point!Standardised IO-Link technology (IEC 61131-9) makescommunication with sensors and actuators simple and economical. The result of an evolutionary development, this low-cost connectiontechnology with three or five conductors is used for point-to-point connection without complex wiring and with minimal material requirements.Parameterisation made easy Software-supportedparameterisation of intelligent sensors and actuators via the IO-Link master makes it extremely easy to set andreassign parameters. All descrip-tion files are stored in the central IODD finder database. Theautomatic parameter assignment server function (data storage) following device replacement is an especially convenient feature.Less downtime, increased productivityThe comprehensive exchange of diagnostic and operational data between device and master systems speeds up troubleshooting and forms the basis for condition monitoring systems.Safe investment thanks to standardisationAn international, open and fieldbus-independent IO-Link standard supports existing and future connection concepts.Easier to installUncomplicated wiring of the sensor-actuator combinations with standardised, unscreened cables reduces material costs, simplifies logistics and saves time.Easier communicationMore flexible communication thanks to standardisation, from the control level to the field level, and compatible with Industry 4.0 host environments.IO-Link – the intelligent “last step” in automationIO-Link is not a new bus system, but a new kind of interface which expands fieldbus and Industrial Ethernet systems. IO-Link allows you not only to transmit process data, but also to download parameter data from the control system to the sensor or actuator, and to send diagnostic data in the other direction to the control system.Whereas integrating a fieldbusinterface all the way down to thelowest field level used to be verycostly, digital or analogue valuescan now be transmitted with onlya simple 3- or 5-wire cable – withno special features in terms ofscreening, twisting, impedanceor terminating resistance.The gateway between thefieldbus and one or more IO-Linkslaves is normally provided bya fieldbus device with multipleIO-Link master channels. Insmaller machines or systems,which may not require a fieldbusbecause of their size, the PLCacts as the IO-Link master.What does IO-Link do?• Serial, bidirectional communication interface for sensors and actuators• Simplified commissioning of a wide range of devices based on standardised profiles• Point-to-point connection at field level with master-device communication • Can be used either for simplesensors or for very complexsensor-actuator combinations• One standard connection formeasuring or switchingsensors as well as for fielddevices with a mix of signalsand data• Compatible with standardcables and connectors• Parameter assignment serverfunction (data storage) for thefast and easy replacement ofsensors and actuators. If anIO-Link device fails, the oldsettings are automaticallytransferred to the replacementdevice by the IO-Link master• Device description file IODDfor easy parameterisation onthe PC with a graphical userinterface: https://ioddfinder.What are the key features of IO-Link?A mass of expertiseFesto is a member of all the globally relevant fieldbus/Ethernet organisations as well as AS-Interface and IO-Link. We have been developing fieldbus-capable electronic components for more than 25 years, and we are a global market leader in intelligent pneumatics and in technical basic and further training.All fieldbus/Ethernet, AS-Interface and IO-Link products are suitable for use as “contributors” interms of Industry 4.0. IO-Link offers a clear and machine-readable data structure. Festo offers you a comprehensive IO-Link portfolio for integrated solutions from the mechanical system to the cloud.Professional and consistent decentralisation: the compact controller CECC with four IO-Link master ports doesn’t just reduce the cost of installing and networking intelligent sensors and valve terminals. It also provides valuable diagnostic options. The automation system CPX-E with 4-way IOL master in IP20 is a new addition.Economical and efficient installationLow-cost standard cables and IO-Link for valve terminals instead of multi-pin plugs allow simple, decentralised diagnostic messagesand offer distinct technical advantages, such as more flexible installation, improved energy chain feed-through, and optimum adaptation to humid or particularly harsh ambient conditions.Secure processes and data transmissionProportional pressure regulators VPPM or vacuum generators OVEM connected to the IO-Link master do not need a screened analogue cable, making the signal level less prone to interference. Para m eterisation and data storage take place in the IO-Link master (parameter assignment server function), so that devices can be restarted after replacement.Easy integration of complex sensorsThe uniform interface in IO-Link replaces individual sensor connections, e.g. with a mix of analogue and digital signals. That means that even position transmitters SDAT and parame -terisable pressure and flow sensors can be integrated and installed at low cost.Secure: valve terminals with type B portsValve terminals from Festo have a galvanically isolated power supply to the electronics and valves. They communicate using the IO-Link V1.0 and V1.1 protocol with a baud rate according to COM3. And astype B port devices, they ensure that valves can be shut down securely after emergency off.Other IO-Link devices from Festo have a type A port and protocol V1.1.IO-Link benefits with FestoThe benefits of Industry 4.0 and IO-LinkInstallation, parameterisation and diagnostics in peak formDSBF DRRD DSBC DSBGCPV MPA-L VTUB VTOC VTUG SDATElectrical connections Pneumatic connections* Installation system CTEL, bus node CTEU, adapter CAPC for 2 Festo I-Port/IO-Link devicesESG ELGR EPCOCTSL -M8CTSL -M12SCDNOVELCMMO-STCMMO-STSPAESPANSFAHSFAWCompact controller CECC as master (port type B, V1.1)IO-Link and products from Festo• CECC-LK and CECC-S can also be operated as IO-Link devices on any IO-Link master module • For activating electric and pneumatic actuators for small tasks• Stand-alone or in mechatronic solutions via CODESYS V3.5 provided by Festo, with OPC UA for Industry 4.0Features• Hybrid: direct activation and connection of electric and pneumatic actuators via CANopen• Can be integrated into higher-level systems via Modbus/TCP • Compact and with more functionsTerminal CPX (port type B, V1.0)Allows one or more master interfaces for IO-Link devices to be integrated when used as remote I/O or in conjunction with valve terminals.Currently available for:PROFINET SERCOS III EtherNet/IPCoDeSys controller CPX-CEC-V3-5(≥SP7)Features• On-site installation• Control platform to IP65• Integrated in a valve terminal MPA or VTSA• Comprehensive function integration• Simple control of pneumatic or electric actuators• Plus: individual IO-Link third-party devices can be connected in the near/direct vicinity of the valve terminalValve terminal MPA-L (port type B, V1.1)Expandable in individual steps.Features• Light, cost effective andcorrosion-resistant thanksto sub-base with polymertechnology• Wide range of electricalconnection options frommulti-pin plug up to fieldbusthanks to Festo I-Port (IO-Link)and CPX • Low-cost and tamper-proof fixed restrictor with vertical pressure shut-off plateto replace valves during operation, and pressure regulator• Three combinable valve sizes for flow rates of upto 850 l/min, optionallyin polymer or metal designCPX-E modular remote I/O and control systemPowerful and extremely compact system for factory automation focusing on the function of motion control (CODESYS V3). Profinet, EtherNet/IP, EtherCAT or OPC UA for Industry 4.0 are available for integration in existing host environments, plus a 4-way IO-Link master module for system expansion.Features• High performance (Dual Core766 MHz, 512 MB RAM)• Integrated bus masterinterfaces:−EtherCAT master• Integrated bus slave interfaces:−PROFINET device−EtherNet/IP slave(from the end of 2018)• Bus modules:−PROFIBUS−PROFINET−EtherCAT−EtherNet/IP(with Modbus/TCP)• USB interface• SD card interface• Optional display• Modern programming systemCODESYS V3 to IEC 61131-3>SP10• Integration of motion fun c tions(SoftMotion)• UL/CSA, C-Tick, IEC ExcertificationsValve terminal VTUG (port type B, V1.1)Compact with high flow rate: VTUG with plug-in.Features• A wealth of electricalconnection options from multi-pin plug up to fieldbus thanksto Festo I-Port (IO-Link)• Manifold rails for directintegration and optimisedinstallation in control cabinets• Electrically and pneumaticallyactuated valves for vacuumapplications even in an ATEXenvironment• Three valve sizes for flow ratesof 220 up to 1300 l/minInput module CTSL (port type A, V1.0)16 inputs on 8xM12 or 16xM8.Features• Display of the input statuses for each input signal via an assigned LED• Operating voltage supply 24 V DC for all connected sensors• M12: DUO plug connector with double allocation• Labelling options on all sides with large, hinged inscription label• Earthing plate and H-railmounting already integratedValve terminal VTOC (port type B, V1.0)Valve terminal CPV (port type B, V1.0)Pilot/miniature valve terminalMaximum power density, light and compact.Features• Wide range of electricalconnection options thanks to Festo I-Port (IO-Link)• Interlock option for more safetyFeatures• Electrically actuated valves for vacuum applications even in an ATEX environment • ATEX certification as per EU ATEX directive• Manifold rails for direct integration and optimised installation in control cabinets • Three valve sizes for flow ratesof 400 up to 1600 l/minProportional pressure regulator VPPM (port type A, V1.1)Position transmitter SDAT (port type A, V1.1)First proportional valve with IO-Link connection technology.Piston position detection with high repetition accuracy, whether for monitoring screwing-in processes, riveting, ultrasonic welding, pressing or adhesive bonding, or for object detection.Features• Short cycle times thanks to point-to-point connection • Choice of 3 regulator settings • Easy connection to the system • Adjustable pressure rangesApplications• Pressure regulation • Checking • Metering • Pressing • Press fittingMain industry segments • Special purpose machines, food and beverage, printing and paper, automotive, electronics and assemblyFeatures• Analogue feedback signal for piston position • Optimised for T-slots • Insertable from above• Sensing ranges from 50 to 160 mm• SDAT-MHS and SMAT-8M: transmitter solutions for large and small drives• High repetition accuracy • Programmable IO-Link/switching output• Five sensing ranges to match the most important standard strokes• Sensor function and mechanical mounting suitable for all FestodrivesSignal converters SCDN The signal converter detects analogue current or voltagesignals from sensors (transmitters). Connection to the higher-level system is provided by IO-Link. Process values can be read out and parameters changed and transmitted to additional devices.Features• Transmitter signal range scalable (e.g.: 1 … 5 V)• Measured value indicator can be individually configured • Min./max. monitoring • PNP/NPN, switchable • Eco mode• Tamper protection with security code• Filter can be adjusted to smooth the signals• Quick and easy setting of theswitching points via teach-inFlow sensor SFAW and SFAH (port type A, V1.1)Motor controller CMMO-ST (port type A, V1.1)Features• For liquid media• Clip connection for quick replacement• For measuring flow rate, volume and temperature, e.g. when monitoring a cooling circuit• Rotatable sensor display which can be aligned after installation for optimum viewing• Sensor can be rotated around its longitudinal axis when installed• Display switches between red and blue for visual feedback on system status• Sensor SFAH for air and non-corrosive gasesFeatures• Optimised Motion Series: the entire system, consisting of actuator, permanentlyintegrated stepper motor with servo functionality, servo controller and cabling, can be ordered with one order code and is easy to configure via web serverPerfect for use with:• Electric cylinder EPCO • Electric axis ELGR • Rotary driveClosed-loop servo controller as a position controller for stepper motors on IO-Link.System structure with power supply unit, motion controller CECC and laptop for simpleparameterisation via web serverPressure transmitters SPAE and pressure sensors SPAU and SPAN (port type A, V1.1)FeaturesSPAE: very small pressure sensor with indicator for core pneumatic applications• Ideal for vacuum applications with pick & place in assembly and testingSPAN: compact 30x30 mmpressure sensor with wide range of variants in pressure range up to 16 bar• Electrical compatibility with all controllers• Tamper protection• Attractive price and great performanceSPAU: universal pressure sensor and transmitter for all non-corrosive gases• Uniquely flexible connection concept• Quick and easy mounting and commissioning• Visual pressure statusindication: blue for pressure OK, red for pressure not OKSPAUSPANSPAESFAWSFAHAutomation with IO-Link ® – Subject to change – 2018/0511Vacuum generator OVEM and OVEL (port type A, V1.1)Connecting cable NEBU-… compatible with IO-Link Features• Digital setpoint/actual value transfer, convenient parame-terisation and accurate diagnostic feedback.• Device exchange withautomatic re-parameterisation.• Ejector pulse: quick, precise and reliable, separately controllable.The modular vacuum generator series OVEM offers a wide range of individually selectablefunctions, so that a solution for a huge variety of applications can be found.• OVEM monitors the setevacuation and ejection time for each cycle. With automatic and timely error reporting. Additionally: LCD displayFeatures• M8/M12 and other connecting cables available in standard lengths as stock items• Modular cable system with individually configurable connecting cables M8/M12 – precisely tailored toyour application and your requirementsSpecial catalogue “Electrical Connection Technology” available. Individual advicepossible with “cable folder”.OVELOVEM135618 e n 2018/05 – E r r o r s a n d o m i s s i o n s e x c e p t e dIO-Link – created for greater productivityDiagnostics:Festo IO-Link masters have a comprehensive range of diagnostic options – seen here using the CPX interface as an example (I-Port interface for IO-Link). The “IOL_Call” module also allows seamless integration into a Siemens diagnostic environment.Web server in PROFINET fieldbus nodeFesto Maintenance Tool FMT, error message from an IO-Link third-party deviceYour goal is to increase productivity. Automation with innovative IO-Link products from Festo takes you directly to your goal. Judge for yourself:Take your future into your own hands:with IO-Link and electric automation from FestoSecurity• IO-Link provides a secure connection for analogue, binary and serialcommunication devices.Typical IO-Link applications for complex sensor technology and terminals: in the body shop and in automotive assembly, for personal protection with safety fences, in heavy machinery construction and for machine tools, at manual workstations, assembly cells, input/output stations etc.EfficiencyIO-Link is a uniform,standardised and therefore efficient technology for installation and wiring.SimplicityIO-Link devices are quick and easy to parameterise – and can be put back into operation immediately after replacement without the need for engineering software tools.CompetencyFesto offers a comprehensive range of products for IO-Link from a single source: several masters, pressure and flowsensors, displacement encoders/position transmitters, five valve terminal series, proportionalpressure regulators, vacuumgenerators, stepper motor controllers and the connecting cables. In addition, Festo has awealth of application knowledge in factory and processautomation, as well as basic and further training for industrial users – right up to Industry 4.0.。
Festo 产品说明书
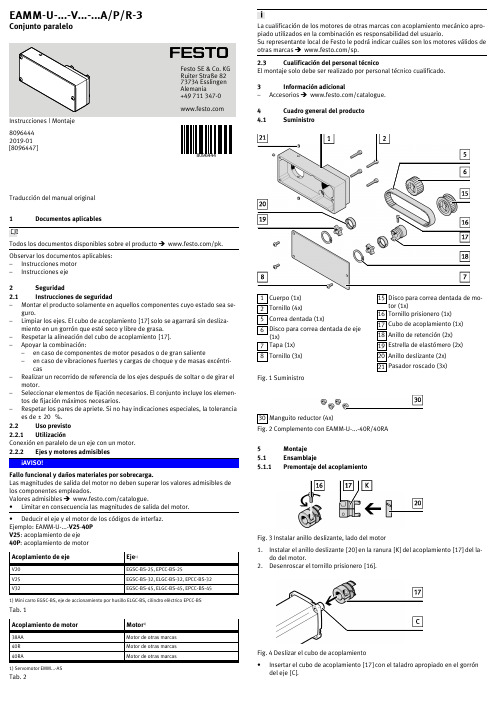
Traducción del manual original 1Documentos aplicablesTodos los documentos disponibles sobre el producto è/pk.Observar los documentos aplicables:–Instrucciones motor –Instrucciones eje2Seguridad 2.1Instrucciones de seguridad–Montar el producto solamente en aquellos componentes cuyo estado sea seguro.–Limpiar los ejes. El cubo de acoplamiento [17] solo se agarrará sin deslizamiento en un gorrón que esté seco y libre de grasa. –Respetar la alineación del cubo de acoplamiento [17].–Apoyar la combinación:–en caso de componentes de motor pesados o de gran saliente–en caso de vibraciones fuertes y cargas de choque y de masas excéntricas–Realizar un recorrido de referencia de los ejes después de soltar o de girar elmotor.–Seleccionar elementos de fijación necesarios. El conjunto incluye los elementos de fijación máximos necesarios.–Respetar los pares de apriete. Si no hay indicaciones especiales, la toleranciaes de ± 20 %.2.2Uso previsto 2.2.1UtilizaciónConexión en paralelo de un eje con un motor.2.2.2Ejes y motores admisiblesFallo funcional y daños materiales por sobrecarga.Las magnitudes de salida del motor no deben superar los valores admisibles de los componentes empleados.Valores admisibles è /catalogue.•Limitar en consecuencia las magnitudes de salida del motor.•Deducir el eje y el motor de los códigos de interfaz.Ejemplo: EAMMU...V2540P V25: acoplamiento de eje 40P : acoplamiento de motor Acoplamiento de ejeEje 1)V20EGSCBS25, EPCCBS25V25EGSCBS32, ELGCBS32, EPCCBS32V32EGSCBS45, ELGCBS45, EPCCBS451) Mini carro EGSCBS, eje de accionamiento por husillo ELGCBS, cilindro eléctrico EPCCBSTab. 1Acoplamiento de motorMotor 1)38AAMotor de otras marcas 40RMotor de otras marcas 40RAMotor de otras marcas1) Servomotor EMM...ASTab. 2La cualificación de los motores de otras marcas con acoplamiento mecánico apropiado utilizados en la combinación es responsabilidad del usuario.Su representante local de Festo le podrá indicar cuáles son los motores válidos de otras marcas è /sp.2.3Cualificación del personal técnicoEl montaje solo debe ser realizado por personal técnico cualificado. 3Información adicional–Accesorios è /catalogue.4Cuadro general del producto 4.1Suministro1Cuerpo (1x)2Tornillo (4x)5Correa dentada (1x)6Disco para correa dentada de eje (1x)7Tapa (1x)8Tornillo (3x)15Disco para correa dentada de motor (1x)16Tornillo prisionero (1x)17Cubo de acoplamiento (1x)18Anillo de retención (2x)19Estrella de elastómero (2x)20Anillo deslizante (2x)21Pasador roscado (3x)Fig. 1 Suministro30Manguito reductor (4x)Fig. 2 Complemento con EAMMU...40R/40RA 5Montaje 5.1Ensamblaje5.1.1Premontaje del acoplamientoFig. 3 Instalar anillo deslizante, lado del motor1.Instalar el anillo deslizante [20] en la ranura [K] del acoplamiento [17] del lado del motor.2.Desenroscar el tornillo prisionero [16].Fig. 4 Deslizar el cubo de acoplamiento •Insertar el cubo de acoplamiento [17] con el taladro apropiado en el gorrón del eje [C].8096444EAMM-U-...-V...-...A/P/R-3Conjunto paralelo8096444201901[8096447]Festo SE & Co. KG Ruiter Straße 82 73734 Esslingen Alemania+49 711 347Fig. 5 Alinear el cubo de acoplamiento1.Respetar la distancia (Y) .2.Apretar el tornillo prisionero del lado del motor [16].Fig. 6 Instalar anillo deslizante, lado del eje •Instalar el anillo deslizante [20] en la ranura [L] del cubo de acoplamiento del lado del eje [P].5.1.2Alineación de acoplamientoAlineación defectuosa del acoplamientoSi la dimensión Y está mal ajustada, se produce un mayor desgaste de la correa y puede provocar el contacto mecánico entre disco para correa dentada y cuerpo y tapa.•Respetar la distancia.Fig. 7 Alineación del cubo de acoplamiento EAMM-U-Y ±0,3[mm]45V2538AA 2645V2540R 25,545V2540RA 18,545V3238AA 2645V3240R 25,545V3240RA18,5Tab. 3 5.1.3Conexión motor y ejeFig. 8 Fijar el disco para correa dentada del lado del motor1.Insertar la estrella de elastómero [19], con el rebaje [M] mirando hacia el exterior, en el disco para correa dentada [15].2.Deslizar hasta el tope el disco para correa dentada [15] junto con la estrellade elastómero [19] en el cubo de acoplamiento [17].3.Insertar el anillo de retención [18] en la ranura [N] del cubo deacoplamiento [17].Fig. 9 Fijar el disco de correa dentada por el lado del eje1.Insertar la estrella de elastómero [19], con el rebaje [M] mirando hacia el exterior, en el disco para correa dentada [6].2.Deslizar hasta el tope el disco para correa dentada [6] junto con la estrella deelastómero [19] en el cubo de acoplamiento [P].3.Insertar el anillo de retención [18] en la ranura [C] del cubo deacoplamiento [P].Fig. 10 Fijar el cuerpo al eje1.Insertar el cuerpo [1] en el collar de centrado del ejeÄEl pasador antirrotación [O] del eje encaja en el taladro del cuerpo [1].2.Fijar el cuerpo [1] con los pasadores roscados [21] en la ranura en V del collarde centrado.Fig. 11 Posicionamiento del motor •Posicionar el motor en el cuerpo [1].ÄEl motor puede desplazarse y puede inclinarse fácilmente.Fig. 12 Colocar la correa dentada1.Desplazar el motor, hasta hacer tope, en el sentido del eje, e inclinar ligeramente.2.Colocar la correa dentada [5] primero en el disco para correa dentada [15] y,después, en el disco para correa dentada [6].Con el EAMMUV..40R/40RA se requieren los manguitos reductores [30].Fig. 13 Colocar el manguito reductor •Montar los manguitos reductores [30] en los orificios de fijación del motor.Fig. 14 Fijar el motor •Fijar el motor con los tornillos [2] al cuerpo [1].ÄEl motor puede desplazarse pero no se puede inclinar más.5.1.4Tensado de la correa dentadaExcesiva pretensión de la correa dentada.Cargas radiales inadmisibles o rotura del eje.Elevado desgaste de la correa dentada, así como de los cojinetes del eje y del motor.•Evítese una excesiva pretensión de la correa dentada.Se recomienda que la pretensión de la correa dentada sea reducida.La correa dentada [5] estará tensada cuando los ramales [D] discurran más o menos en paralelo:–Destensada: y > x–Tensada: y L1 … 1,05 xFig. 15 Ramales de la correa dentadaFig. 16 Tensar la correa dentada1.Desplazar el motor hasta que sobre la correa dentada [5] se ejerza la fuerzaelástica Fv.2.Apretar los tornillos [2].EAMM-UFuerza elástica Fv[N]305 ... 153817 (4045)17 (40)Tab. 4 Fuerza de tensión admisible de la correa dentada5.1.5Montaje de la tapaFig. 17 Montar la tapa •Antes de la puesta en funcionamiento: fijar la tapa [7] con los tornillos [8] al cuerpo [1].5.2Instalación 5.2.1Soporte de la combinación de eje y motorFig. 18 La combinación debe soportarse sin crear tensiones •Apoyar la combinación libre de tensiones para evitar daños.6Durante el funcionamiento Riesgo de lesiones al tocar superficies calientes.El juego de montaje del motor se calentará debido al calor generado por el motor.•No tocar el juego de montaje del motor durante el funcionamiento ni inmediatamente después.Riesgo de lesiones por movimiento inesperado de componentes en caso de fallo de la correa dentada.•Cumplir las medidas de seguridad complementarias.7Mantenimiento 7.1Comprobación de la correa dentadaLa correa dentada [5] es una pieza de desgaste è /spareparts. probar la correa dentada [5] periódicamente:–cuando se cumplen los plazos de mantenimiento de la máquina –cuando se sustituye un eje2.Sustituir la correa dentada [5] cuando aparezcan los siguientes indicios dedesgaste:–fuerte acumulación de partículas de desgaste en la carcasa –grietas en el dorso de la correa dentada–hilado de tracción de fibra de vidrio visible en la base de los dientes 7.2Sustitución de la correa dentadaFig. 19 Desmontar la correa dentadaEn caso de montaje en posición vertical o transversal:•Respetar las instrucciones de seguridad correspondientes incluidas en lasinstrucciones del eje.1.Retirar los tornillos [2].ÄEl motor puede desplazarse y puede inclinarse fácilmente.2.Desplazar el motor, hasta hacer tope, en el sentido del eje, e inclinar ligeramente.3.Retirar la correa dentada [5] de los discos para correa dentada [6] y [15].8Especificaciones técnicas8.1Tamaño de tornillos y pares de aprieteEAMM-U-[2] [Nm][8] [Nm][16][Nm][21][Nm] 45V2538AA M3x241,2M3x81,2M2,5x81M3x60,8 45V2540R M3x201,2M3x81,2M2,5x81M3x60,8 45V2540RA M3x161,2M3x81,2M2,5x81M3x60,8 45V3238AA M3x241,2M3x81,2M2,5x81M3x60,8 45V3240R M3x201,2M3x81,2M2,5x81M3x60,8 45V3240RA M3x161,2M3x81,2M2,5x81M3x60,8 Tab. 5。
FESTO电动气帕司-BS系列产品介绍说明书

Electric cylinder units EPCS-BSThis product is also available as a modular mechanical systemElectric cylinder EPCC2d Internet: /catalogue/...Subject to change – 2023/08Electric cylinder units EPCS-BSKey featuresAt a glancePlug and work with the Simplified Motion SeriesThe simplicity of pneumatics is now combined for the first time with the advantag-es of electric automation thanks to the Simplified Motion Series.These integrated drives are the perfect solution for all users who are looking for an electric alternative for very simple movement and positioning tasks between two mechanical end positions, but don't want the commissioning process for tra -ditional electric drive systems that can often be quite complex. There is no need for any software since operation is simply based on the "plug and work" principle. Digital I/O (DIO) and IO-Link ® are always automatically in -cluded – a product with two types of control as standard.IntegratedEasyStandardisedConnectedThe integrated electronics in the drive are at the heart of the Simplified Motion Series.For commissioning, simply set all rele-vant parameters directly on the drive:• Speed and force• Reference end position and cush -ioning• Manual operationElectrical connection via M12 plug design• Power (4-pin): power supply for the motor• Logic (8-pin): control signal, sensor signal and power for the integrated electronicsUse of extended functions possible via IO-Link ®:• Remote configuration of motion pa-rameters• Copy and backup function for trans -ferring parameters• Read function for extended p rocess parameters• Freely definable intermediate posi-tion• Firmware updateThe functions of the Simplified Motion Series Basic profile for movement between two end positions: Extended motion profile for simplified press-fitting and clamping functions: with v v• • Proximity switches are required in order to implement any intermediate positions.• With the intermediate position that can be freely configured via IO-Link ®, movements can be stopped at any point between the end positions, without the need for proximity switches or external stops32023/08 – Subject to changed Internet: /catalogue/...Electric cylinder units EPCS-BSKey featuresAt a glance• Without external servo drive: all the necessary electronic components are com -bined in the integrated drive• Two control options integrated as standard: digital I/O and IO-Link ®• Complete solution for simple movements between mechanical end positions • Simplified commissioning: all parameters can be manually set directly on the drive• No special expertise required for commissioning• End-position feedback similar to that of a conventional proximity switch is inte-grated as standard• Very high-quality ball screw with low internal friction• Ideal for precise and fast movement in sorting, distribution or clamping appli -cationsThe products in the Simplified Motion Series Electric cylinder unit EPCE Electric cylinder unit EPCSElectric cylinder unit with parallelmotor mounting EPCSMini slide unit EGSS-BS-KFMini slide unit with parallel motor mounting EGSS-BS-KFSpindle axis unit ELGS-BS-KFSpindle axis unit with parallel motor mounting ELGS-BS-KFToothed belt axis unit ELGS-TB-KF Toothed belt axis unit ELGE Rotary drive unit ERMSModular and flexible with motor, motor mounting kit and servo driveThis product is also available as a modular mechanical system as electric cylinder EPCC-BS:When it comes down to flexibility and adaptability, the compact dimensions and different combinations are ideal for making optimal use of the installation space.• Compact: optimum ratio of installation space to working space • Unique: "one-size-down" mounting system• Modular: individual combinations with motor, motor mounting kit and servo drive • Flexible: wide range of mounting options for optimum machine integration4d Internet: /catalogue/...Subject to change – 2023/08Electric cylinder units EPCS-BSKey featuresCombination matrix between axis ELGC-TB/ELGS-TB, ELGC-BS/ELGS-BS, mini slide EGSC-BS/EGSS-BS, electric cylinder EPCC-BS/EPCS-BS and guide axis ELFC Mounting options with profile mounting and with angle kitWith profile mounting EAHF-L2-…-P-D…With angle kit EHAA-D-L2-…-APElectric cylinder units EPCS-BS Key featuresCombination matrix between axis ELGC/ELGS-TB, ELGC/ELGS-BS, mini slides EGSC/EGSS-BS, electric cylinder EPCC/EPCS-BS and guide axis ELFCMounting options with adapter kit or direct fasteningWith adapter kit EHAA-D-L2With direct mounting• Mounting option: base axis with the same size assembly axis• Mounting option: base axis with height compensation for one-size-down as-sembly axis• When motors are mounted using parallel kits, this may lead to interfering con-• Mounting option: base axis with the same size assembly axis5 2023/08 – Subject to change d Internet: /catalogue/...6d Internet: /catalogue/...Subject to change – 2023/08Electric cylinder units EPCS-BSKey featuresTypical handling systemsThe axes ELGC can be combined into very space-saving handling systems that are suitable for assembly systems, test and inspection systems, small parts handling, the electronics industry and desktop applications where compact dimensions are essential. Combining the very compact linear axes ELGC, mini slides EGSC and electric cyl-inder EPCC offers an optimum ratio of installation space to working space. These feature a common system approach and platform architecture and the connections are largely adapterless.Cantilever systemPlanar surface gantry3-dimensional gantryElectric cylinder units EPCS-BS Type codes7 2023/08 – Subject to change d Internet: /catalogue/...8d Internet: /catalogue/...Subject to change – 2023/08Electric cylinder units EPCS-BSPeripherals overviewCable outlet direction Standard[D] Underneath [L] Left [R] RightControl elements[1] Pushbutton actuators for parameterisation and controlOn topaaElectric cylinder units EPCS-BS Peripherals overview1)Proximity switches are optional and only required in order to sense any intermediate positions.92023/08 – Subject to change d Internet: /catalogue/...10d Internet: /catalogue/...Subject to change – 2023/08Electric cylinder units EPCS-BSDatasheet-N- Size 32 ... 60-T-Stroke length 25 ... 500 mm1) At the drive shaft 2) When new3) Adjustable in increments of 10%4)Unchangeable parameterDatasheetMaterialsSectional view1234Pin allocationPower supply Logic interface Plug PlugDatasheetMaximum permissible loads on the piston rodIf there are two or more forces and torques si -multaneously acting on the piston rod, the following equations must be satisfied:F 1/M 1 = dynamic value F 2/M 2 = maximum valueff vv =|FF yy 1|FF yy2+|FF zz1|FF zz2+|MM yy1|MM yy2+|MM zz1|MM zz2≤1 |MMMMMMMM | ≤ MMMMMMMM mmmmmmmm mmmm|FFFF FFFF | ≤ FFFFFFFF mmmmmmmm mmmm Maximum permissible lateral forces Fy max and Fz max on the piston rod as a function of projection AEPCSA [mm]F y m a x , F z m a x [N ]100200300400500600110100EPCS-BS-32EPCS-BS-45EPCS-BS-60H- -NoteEngineering software Electric Motion Sizinga /x/electric-motion-sizingPiston rod deflection f 2 as a function of projection A and lateral force FA [mm]f [m m ]1002003004005006000123456ffff 1=FFFF 1FFFF 2∙ffff 2f 1 = Piston rod deflection caused by lateral force [mm]F 1 = Lateral force [N]F 2 = Standardised lateral force [N] (constant force from graph)f 2= Piston rod deflection caused by lateral force [N] (reading from graph)Example : Electric cylinder EPCS-32-50-8P with a lateral force of 7 N F 1 = 7 N and F standard = 3.5 NValue read from graph for EPCS-32 and projection = 50 mm f 2 = 1 mmCalculation of deflection caused by lateral force:ffff 1=FFFF 1FFFF 2∙ffff 2=3 NNNN 1,5 NNNN∙1 mmmmmmmm =2 mmmmmmmmEPCS-BS-32 (F 2 = 3.5 N)EPCS-BS-45 (F 2 = 4.0 N)EPCS-BS-60 (F 2 = 8.0 N)DatasheetCalculating the mean feed force F xm with the electric cylinder EPCSThe peak feed force value must not exceed the maximum feed force within a movement cycle. The peak value is generally achieved in vertical operation during the acceleration phase of the upwards stroke. If the maximum feed force is exceeded, this can increase wear and thus shorten the service life of the ball screw. The maximum speed must likewise not be exceed-ed:F xš F xmax andv xš v xmaxCalculating the mean feed force F xm (to DIN 69051-4)During operation, the continuous feed force may be briefly exceeded up to the maximum feed force. The continuous feedforce must, however, be adhered to when averaged over a movement cycle:F xmš F xcontinuousFFFF xxxx xxxx=��FFFF xxxx3∙vvvv xxxx vvvv xxxx xxxx∙qqqq1003=FFFF xxxx xxxx=�FFFF xxxx13∙vvvv xxxx1vvvv xxxx xxxx∙qqqq1100+FFFF xxxx23∙vvvv xxxx2vvvv xxxx xxxx∙qqqq2100+FFFF xxxx33∙vvvv xxxx3vvvv xxxx xxxx∙qqqq3100 3+⋯Mean feed speed (to DIN 69051-4)vv xxxx=∑vv xx∙qq100=vv xx1∙qq1100+vv xx2∙qq2100+vv xx3∙qq3100+⋯F x Feed forceF xm Mean feed forceF xmax.Max. feed forceF xcontinuous C ontinuous feed forceq Timev x Feed speedv xm Mean feed speedv xmax.Max. Feed speed F x [N]q [100%]F xmaxF xmF x3F x2F x1q1q2q3v x [mm/s]q [100%]v xmav xmv x3v x2v x1q1q2q3Mean feed force F xm as a function of running performance L, with an operating coefficient f B of 1.0 at room temperature Size 32Size 45EPCS-45L [km]F [N ]200040006000800010000075150225300375450525600EPCS-BS-32-3P EPCS-BS-32-8PEPCS-BS-45-3P EPCS-BS-45-10PSize 60EPCS-60L [km]F [N ]20004000600080001000002004006008001000EPCS-BS-60-5P EPCS-BS-60-12P1) This refers to stress caused by impact, temperature, contamination, shock and vibrations that affect the cylinder or piston rod.H- -NoteThe specifications for running performance are based on experimentally deter-mined and theoretically calculated data (at room temperature). The running per-formance that can be achieved in practice can deviate considerably from the specified curves under different parameters.LLLL 1=LLLL ffff BBBB3L 1 Actual service life L Target service life(d graphs)f B Operating coefficientDatasheetSizing example Application data:• Payload: 25 kg• Mounting position: horizontal • Motor mounting position: axial • Stroke: 150 mm• Max. permissible positioning time: 2 s (one direction)Step 1: Selecting the smallest possible size from the table a page 10Step 2: Selecting the max. speed level v for payload mStep 3: Reading off the min. positioning time t for stroke lEPCS-45-10P v m [k g ]EPCS-45-10P vt [s ]HorizontalVerticall = 50 mm l = 100 mm l = 150 mm l = 200 mm l = 250 mm l = 300 mma Max. speed level for the payload: level 7a Min. positioning time for 150 mm at level 7: 1 sResultThe application can be implemented using EPCS-BS-45-150-10P . A minimum positioning time (one direction) of 1 s is achieved. Longer positioning times can be select-ed at any time using a lower speed level.Mass m as a function of speed level v With axial kit EPCS-BS-32-3PEPCS-BS-32-8PEPCS-32-3P v m [k g ]123456789100510152025EPCS-32-8Pvm [k g ]123456789100510152025Horizontal VerticalEPCS-BS-45-3PEPCS-BS-45-10PEPCS-45-3Pv m [k g ]123456789100102030405060EPCS-45-10Pvm [k g ]12345678910010********Horizontal VerticalEPCS-BS-60-5PEPCS-BS-60-12PEPCS-60-5Pv m [k g ]12345678910020406080100120EPCS-60-12Pvm [k g ]123456789100102030405060Horizontal VerticalH- -NoteThe lines represent the maximum values. The lower speed levels can be set at any time.DatasheetPositioning time t as a function of speed level v and stroke l With axial kit EPCS-BS-32-3PEPCS-BS-32-8PEPCS-32-3P v t [s ]123456789100510********EPCS-32-8Pvt [s ]12345678910024681012l = 50 mm l = 100 mm l = 150 mm l = 200 mml = 50 mm l = 100 mm l = 150 mm l = 200 mmEPCS-BS-45-3P EPCS-BS-45-10PEPCS-45-3Pv t [s ]12345678910010********EPCS-45-10Pv t [s ]12345678910024********l = 50 mm l = 100 mm l = 150 mm l = 200 mm l = 250 mm l = 300 mm l = 50 mm l = 100 mm l = 150 mm l = 200 mm l = 250 mm l = 300 mmElectric cylinder units EPCS-BSDatasheetPositioning time t as a function of speed level v and stroke l With axial kit EPCS-BS-60-5PEPCS-BS-60-12PEPCS-60-5P v t [s ]123456789100102030405060EPCS-60-12Pvt [s ]123456789100510152025l = 50 mm l = 100 mm l = 150 mm l = 200 mm l = 250 mm l = 300 mm l = 350 mm l = 400 mm l = 500 mm l = 50 mm l = 100 mm l = 150 mm l = 200 mm l = 250 mm l = 300 mm l = 350 mm l = 400 mm l = 500 mmElectric cylinder units EPCS-BSDatasheetMass m as a function of speed level v With parallel kit EPCS-BS-32-3PEPCS-BS-32-8PEPCS-32-3P v m [k g ]12345678910510152025EPCS-32-8Pvm [k g ]123456789100510152025Horizontal VerticalEPCS-BS-45-3PEPCS-BS-45-10PEPCS-45-3Pv m [k g ]123456789100102030405060EPCS-45-10Pvm [k g ]12345678910010********Horizontal VerticalEPCS-BS-60-5PEPCS-BS-60-12PEPCS-60-5Pv m [k g ]12345678910020406080100120EPCS-60-12Pvm [k g ]123456789100102030405060Horizontal VerticalH- -NoteThe lines represent the maximum values. The lower speed levels can be set at any time.Electric cylinder units EPCS-BSDatasheetPositioning time t as a function of speed level v and stroke l With parallel kit EPCS-BS-32-3PEPCS-BS-32-8PEPCS-32-3P v t [s ]123456789100510********EPCS-32-8Pvt [s ]12345678910024681012l = 50 mm l = 100 mm l = 150 mm l = 200 mml = 50 mm l = 100 mm l = 150 mm l = 200 mmEPCS-BS-45-3P EPCS-BS-45-10PEPCS-45-3Pv t [s ]12345678910010********EPCS-45-10Pv t [s ]12345678910024********l = 50 mm l = 100 mm l = 150 mm l = 200 mm l = 250 mm l = 300 mm l = 50 mm l = 100 mm l = 150 mm l = 200 mm l = 250 mm l = 300 mmElectric cylinder units EPCS-BSDatasheetPositioning time t as a function of speed level v and stroke l With parallel kit EPCS-BS-60-5PEPCS-BS-60-12PEPCS-60-5P v t [s ]123456789100102030405060EPCS-60-12Pvt [s ]123456789100510152025l = 50 mm l = 100 mm l = 150 mm l = 200 mm l = 250 mm l = 300 mm l = 350 mm l = 400 mm l = 500 mm l = 50 mm l = 100 mm l = 150 mm l = 200 mm l = 250 mm l = 300 mm l = 350 mm l = 400 mm l = 500 mmFeed force F as a function of force level F1EPCS-BSF1F [N ]123456789101002003004005006007008009001000EPCS-BS-32-3P/-8P EPCS-BS-45-3P EPCS-BS-45-10P EPCS-BS-60-5P EPCS-BS-60-12PElectric cylinder units EPCS-BS DatasheetElectric cylinder units EPCS-BS DatasheetElectric cylinder units EPCS-BS DatasheetElectric cylinder units EPCS-BS DatasheetElectric cylinder units EPCS-BS Ordering data – Modular product system[2]Not with motor mounting position PR[3]Not with motor mounting position PT[4]Not with motor mounting position PL[5]Not in combination with cable outlet direction R[6]Not in combination with cable outlet direction L[7]Not in combination with cable outlet direction standard[8]Not in combination with cable outlet direction DElectric cylinder units EPCS-BSAccessoriesProfile mounting EAHF-L2-...-P-S• For mounting the cylinder on the side of the profile Material:Anodised wrought aluminium alloyRoHS-compliantProfile mounting EAHF-L2-...-P Material:Anodised wrought aluminium alloy RoHS-compliant • For mounting the cylinder on the side of the profile.The profile mounting can be attached to the mounting surface using the drilled hole in the centreAccessoriesFlange mounting EAHH Material:Galvanised steel RoHS-compliant1)Corrosion resistance class CRC 1 to Festo standard FN 940070 Low corrosion stress. Dry internal application or transport and storage protection. Also applies to parts behind covers, in the non-visible interior area, or parts that are covered in the application (e.g. drive trunnions).Adapter kit EAHA Material:RoHS-compliant1)Corrosion resistance class CRC 1 to Festo standard FN 940070Low corrosion stress. Dry internal application or transport and storage protection. Also applies to parts behind covers, in the non-visible interior area, or parts that are covered in the application (e.g. drive trunnions).AccessoriesSwivel mounting EAHS Material:Galvanised steel RoHS-compliant1)Corrosion resistance class CRC 1 to Festo standard FN 940070 Low corrosion stress. Dry internal application or transport and storage protection. Also applies to parts behind covers, in the non-visible interior area, or parts that are covered in the application (e.g. drive trunnions).Trunnion support LNZG Material:Trunnion support: Anodised aluminiumPlain bearing: Plastic Free of copper and PTFE RoHS-compliant1)Corrosion resistance class CRC 2 to Festo standard FN 940070Moderate corrosion stress. Indoor applications in which condensation can occur. External visible parts with primarily decorative surface requirements that are in direct contact with a normal industrial environment.Swivel flange SNCSMaterial:Die-cast aluminiumFree of copper and PTFE RoHS-compliant1)Corrosion resistance class CRC 1 to Festo standard FN 940070 Low corrosion stress. Dry internal application or transport and storage protection. Also applies to parts behind covers, in the non-visible interior area, or parts that are covered in the application (e.g. drive trunnions).AccessoriesSwivel flange SNCLMaterial:Wrought aluminium alloyFree of copper and PTFE RoHS-compliant1)Corrosion resistance class CRC 1 to Festo standard FN 940070 Low corrosion stress. Dry internal application or transport and storage protection. Also applies to parts behind covers, in the non-visible interior area, or parts that are covered in the application (e.g. drive trunnions).Corrosion resistance class CRC 2 to Festo standard FN 940070Moderate corrosion stress. Indoor applications in which condensation can occur. External visible parts with primarily decorative surface requirements that are in direct contact with a normal industrial environment.Swivel flange SNCBMaterial:Die-cast aluminiumFree of copper and PTFE RoHS-compliant1)Corrosion resistance class CRC 1 to Festo standard FN 940070 Low corrosion stress. Dry internal application or transport and storage protection. Also applies to parts behind covers, in the non-visible interior area, or parts that are covered in the application (e.g. drive trunnions).Accessories1)Packaging unit1)Packaging unitAccessoriesSensor bracket EAPM-L2Material:Anodised wrought aluminium alloyRoHS-compliant412023/08 – Subject to changed Internet: /catalogue/...Electric cylinder units EPCS-BSAccessories。
费斯托 robotino 参数

费斯托 robotino 参数费斯托Robotino是一款先进的机器人,具备多种功能和特点。
它拥有高度灵活的机动性能,能够轻松穿越各种复杂环境。
无论是在室内还是室外,Robotino都能准确地完成各种任务。
Robotino具备智能避障功能,能够自主感知周围环境,并通过内置的传感器来避免与障碍物发生碰撞。
这使得它能够在狭小的空间中自由移动,同时保持与周围物体的安全距离。
Robotino还具备卓越的定位能力。
它采用先进的定位系统,可以在不依赖GPS信号的情况下,准确地确定自身的位置。
这使得Robotino成为一个理想的自动导航工具,可以在复杂的环境中进行精确的定位和导航。
Robotino还具备丰富的传感功能。
它搭载了多种传感器,包括摄像头、激光雷达等,能够实时感知和获取周围环境的信息。
这使得Robotino能够与外界进行有效的交互,并根据实时数据做出智能决策。
Robotino还配备了强大的计算能力和通信功能。
它搭载了高性能的处理器和大容量的内存,能够快速处理各种复杂的算法和任务。
同时,Robotino还支持多种通信接口,可以与其他设备进行无缝连接,实现信息的共享和协同工作。
在实际应用中,Robotino被广泛应用于工业自动化、物流配送、科研教育等领域。
它能够代替人工完成一些重复性、危险性高或繁琐的任务,提高工作效率和安全性。
同时,Robotino还能够作为教育工具,帮助学生学习和掌握机器人技术和编程知识。
费斯托Robotino是一款功能强大、性能卓越的机器人。
它的智能避障、定位导航、传感互动等多种功能,使其成为现代机器人领域的佼佼者。
无论是在工业生产线上,还是在教育研究中,Robotino都能发挥重要作用,为人类的生产和学习带来便利与创新。
FESTO 环形胶囊式产品操作指南说明书
ESNURound cylinderFesto SE & Co. KGRuiter Straße 8273734 EsslingenDeutschland+49 711 347-0Operating instructions81505062021-11[8150508]Translation of the original instructions© 2021 all rights reserved to Festo SE & Co. KG1Applicable Documents2Safety2.1Safety instructions–Only use the product in its original condition without unauthorised modifica-tions.–Take into account the ambient conditions at the location of use.–Observe the identifications on the product.–Store the product in a cool, dry environment protected from UV and corrosion.Keep storage times short.–Before working on the product, switch off the compressed air supply and lock itto prevent it from being switched on again.2.2Intended useThe product is intended for the transport of loads.2.3Training of qualified personnelWork on the product may only be carried out by qualified personnel who can eval-uate the work and detect dangers. Personnel must have the relevant mechanicaltraining.3Additional information–Contact the regional Festo contact if you have technical problemsè .–Accessories and spare parts è /catalogue.4FunctionThe piston rod moves outwards when the cylinder chamber is pressurised.With single-acting cylinders the extended piston rod is retracted by an integratedreturn spring.With a single-ended piston rod the cylinder force is different in forward andreverse.The position of the piston can be queried by proximity switches.5Product designFig. 1:Round cylinder ESNU6Transport1.Take product weight into account è 12 Technical data.2.Maintain the support clearance of £ 300 mm when attaching transportationequipment.7Mounting1.Handle the cylinder so as to avoid any damage to the cylinder barrel and thepiston rod.2.Note the following points:–Parallel mounting when using external guides–Mounting without distortion–Compliance with the permissible loads è /catalogue3.Observe the maximum tightening torque of the counter nut on the malethread on the bearing cap [2].4.Avoid a mechanical alignment inaccuracy between the piston rod and anexternal guide with one of the following measures:–absolutely precise alignment–use of a self-aligning rod coupler FK–use of a guide unit FEN with compensating couplingA rigid coupling will reduce the service life and the function of the cylinder.8Mounting accessoriesIn the case of a large payload, high piston speed or when using quick exhaustvalves:•Use suitable shock absorbers or external stops.To prevent the payload from sliding down suddenly in the event of an air supplyfailure in a horizontal or sloping mounting position:•Use piloted check valves.To set the velocity:•Use one-way flow control valves in the following supply ports:–for single-acting cylinders: GRLZ (supply air)The one-way flow control valves are screwed directly into the supply ports. Useof other accessories with a screw-in depth that is too long will damage thecushioning piston.For position sensing with proximity switches:•Use proximity switches with mounting kit.Avoid external influence caused by magnetic or ferritic parts in the vicinity ofthe proximity switches. Distance ³ 10 mm.9Pneumatic installation•Connect the tubing to the pneumatic port [3].10Commissioning1.Pressurise the complete system. A soft start valve is used for the slow switch-on pressurisation è /catalogue.2.With medium or large payloads or at high velocities:revolution.4.Pressurise the cylinder at the pneumatic port [3].ÄThe piston rod advances to the end position.5.Exhaust the cylinder.ÄThe piston rod is retracted to the end position by the spring return.6.Start the test run.7.If necessary: correct the velocity at the one-way flow control valve. The pistonrod should reach the end stop without hard impact or rebounding.11Fault clearance12Technical data。
Festo 产品使用说明书

原版操作手册的译本© 2020 Festo SE & Co. KG 保留一切权利1关于本文件1.1文件用途本文件介绍了上述产品的使用。
本文件还包含在安全相关系统内使用产品的信息(符合 IEC 61508 标准的安全手册)。
1.2适用文件有关产品的所有可用文件 è 。
文件名内容工作条件 EX 有关产品在爆炸性气体环境中使用的信息认证材料机械安全测试认证Tab. 1 适用文件1.3目标人群该文件面向安装及运行该产品的人员。
该文件还面向负责产品在安全相关系统内的规划和应用的人员。
1.4指定标准版本IEC 61508-1:2010IEC 61508-7:2010IEC 61508-2:2010IEC 61511:2016IEC 61508-4:2010–Tab. 2 指定标准2安全2.1一般性安全提示–仅在原装状态下使用产品,请勿擅自进行改动。
–请仅在技术状态完好的情况下使用本产品。
–遵守产品使用地的法律规定。
–注意使用地的环境条件。
腐蚀性环境将缩短产品的使用寿命。
–请注意产品标签上的说明。
–请注意产品上的各种标识。
–在进行装配、安装和维护工作之前:关闭气源并防止重新接通。
–在装配、安装和拆卸前:对驱动器进行排气。
–由专业人员定期进行产品检查并加以记录 è 9 维护。
–避免设备出现压力波动。
请使用增压阀和减压阀。
工作介质–只允许使用符合规格说明的压缩空气 è 14 技术参数。
–在正常条件下请仅使用未经润滑的压缩空气。
第一次使用经过润滑的压缩空气后,本产品此后只能使用经过润滑的压缩空气运行。
退回 Festo 公司危险材料可能危及人员的健康和安全,特定材料还可能危害环境。
为避免危害,只有满足 Festo 公司明确要求的产品,方可允许退回。
–请联系 Festo 公司当地的联系人。
–填写污染说明并将其安装在外包装上。
–遵守使用危险材料和运输危险品的全部法律规定。
Festo MS系列减压阀说明书

55.2
40.2
4
B4
B5
L1
L2
L3
L4
44
83.4
92.8
34.8
5.6
45.2
99
69
17.5
54
129
98.6
41.3
6.6
41.3
22
d Internet: /catalogue/...
Subject to change – 2021/10
技术参数
尺寸 – 旋转手柄 用于安装到ß1
24
21
24
16.8
42
14.5
24
24
24
34
34
26
34
24
62
15.5
34
34
34
34
CAD 相关数据 a
型号 MS4-LR-...-WB MS4-LR-...-WBM
MS6-LR-...-WB
B1
B2
56
41
66.5
44
79.4
62
B3
B4
L1
L2
订货数据 规格
接口
压力调节范围 0.3 ... 4 bar
订货号
型号
压力调节范围 0.3 ... 7 bar
订货号
型号
集成 MS 压力表,带标准量程,显示单位 [bar],旋转手柄带闩,可用附件锁定
MS4
G1/4
q 529415 MS4-LR-1/4-D5-AS
q 529417
MS6
G1/2
q 529989 MS6-LR-1/2-D5-AS
型号
B2
MS4-LR-...-AD11
FESTO LR 气压调节器说明书

Traducción del manual original 1Documentos aplicablesTodos los documentos disponibles sobre el producto è/pk.DocumentosProducto, tipoContenidoInstruccionesEscuadra de fijación, MS2-WRMontajeTab. 12Seguridad 2.1Instrucciones de seguridad–Utilizar el producto únicamente en su estado original, sin efectuar modifica-ciones no autorizadas.–Utilizar el producto únicamente en perfectas condiciones técnicas.–Tener en cuenta las identificaciones que se encuentran en el producto. –Tener en cuenta las condiciones ambientales en el lugar de utilización. –Antes de realizar trabajos de montaje, instalación o mantenimiento, desco-nectar la alimentación de aire comprimido y asegurarla contra una reconexión accidental.–Respetar los pares de apriete. Si no hay indicaciones especiales, la toleranciaes de ± 20 %.2.2Uso previstoEl regulador de presión LR ha sido diseñado para regular el aire comprimido, delramal aguas abajo, a la presión de salida establecida. La función incluye una pur-ga secundaria integrada y una purga primaria con comportamiento al retorno.2.3Cualificación del personal técnicoEl montaje, la puesta a punto, el mantenimiento y el desmontaje solo deben ser realizados por personal técnico cualificado.3Más información–Accesorios è /catalogue.–Documentación è /sp.4Servicio de postventaAnte cualquier problema técnico, póngase en contacto con el representante regio-nal de Festo è .5Estructura del producto1Botón giratorio 2Manómetro3Tornillo de cierre (lado posterior)Fig. 1 Estructura del producto6Montaje 6.1Distancias de montaje•Mantener el espacio suficiente por encima y por debajo del producto.–Espacio necesario por encima del producto: 20 mm –Espacio necesario por debajo del producto: 30 mm Con montaje en panel frontal:•Respetar el espesor de pared máximo admisible. Espesor de pared: £ 2,5mm.6.2Tipos de fijaciónMontar el producto empleando uno de los siguientes tipos de fijación en función de la utilidad que se la vaya a dar:Tipo de fijaciónMás sobre la descripciónMontaje mural con escuadra de fijación–Instrucciones de montaje è 1 Documentos aplicables.–è 6.5 Instalación.En panel frontal–è 6.1 Distancias de montaje.–Accesorios è /catalogue.Tab. 2 Tipos de fijación 6.3Preparación1.Respetar la posición de montaje è 13 Especificaciones técnicas.2.Respetar el sentido de flujo de acuerdo con las cifras indicadas sobre el cuer-po: de 1 a 2.3.Para descargar de aire el sistema antes de realizar trabajos de mantenimien-to:Emplear la válvula de cierre de la línea de alimentación de aire comprimido. 4.Emplear el material de fijación del catálogo de Festoè /catalogue.5.Respetar el tipo de fijación.6.4Montaje del manómetro1.Girar el manómetro 2 en sentido horario hasta hacer tope. La junta del ma-nómetro está premontada en el bulón de conexión de la rosca.–Se puede realizar una conversión a la variante Z. Para ello, cambiar deposición el tornillo de cierre y emplear la conexión alternativa en el lado posterior del equipo. Par de apriete: 0,5 Nm2.Alinear la escala. Aflojar el manómetro en sentido antihorario y alinear la es-cala del manómetro verticalmente (tras enroscar hasta el tope, aflojar máx.1 vuelta).6.5Instalación1.Colocar el producto en el lugar dónde vaya a utilizarse.2.Respetar las distancias de montaje è 6.1 Distancias de montaje.3.Colocar la escuadra de fijación sobre el producto.4.Apretar la escuadra de fijación con la tuercaè 1 Documentos aplicables è Instrucciones de montaje.5.Fijar la escuadra de fijación sobre la superficie de montaje.7Instalación neumática1.Emplear racores, juntas y tubos flexibles adecuados del catálogo de Festoè /catalogue.2.Enroscar los racores en las conexiones neumáticas.3.Respetar la profundidad máxima de enroscado de la rosca de conexión. Unenroscado profundo reduce el caudal. Profundidad de roscado: £ 6,5 mm 4.Unir los tubos flexibles adecuados hasta hacer tope en el racor.–Los tubos flexibles deben quedar en posición axial respecto a las cone-xiones neumáticas.–Los tubos flexibles no deben presentar ningún radio de curvatura.8Ajustar la presión de salida1.Desbloquear el botón giratorio 1 (tirar).2.Girar el botón giratorio hasta el máximo en el sentido –.3.Presurizar el sistema lentamente: girar el botón giratorio en el sentido +, has-ta alcanzar la presión deseada.Respetar la gama de regulación de la presión è %getreference.La presión de entrada p1 deberá ser siempre, como mínimo, 0,5 bar superior que la presión de salida p2 ajustada.4.Bloquear 1 el botón giratorio (presionar).9Limpiar el producto•Limpiar el exterior del producto con un paño suave cuando sea necesario. Co-mo producto de limpieza puede considerarse cualquier producto de limpieza no abrasivo.10Eliminación de fallosDescripción del falloCausaSoluciónCaudal reducido (la presión de funcionamiento desciende mu-cho cuando hay consumo de ai-re).Estrechamiento en el conducto de alimentaciónComprobar el conducto.La presión sobrepasa el valor ajustado de presión de trabajo.Disco de la válvula defectuoso en el asiento selladorSustituir el producto.8090025MS2-LRRegulador de presión80900252019-01[8090028]Festo AG & Co. KG Ruiter Straße 8273734 Esslingen Alemania+49 711 Descripción del fallo Causa SoluciónAsiento de la válvula dañado Sustituir el producto. Escape de aire audible y cons-tante en el botón giratorioTab. 3 Eliminación de fallos11Desmontaje completo1.Purgar la instalación y el producto por completo.2.Soltar el bloqueo del racor presionando y extraer las tuberías flexibles.3.Aflojar los racores de la brida de unión y desenroscarlos.12Eliminación•Una vez terminada la vida útil del producto, reciclar el embalaje y el propio producto conforme a las disposiciones legales vigentes medioambientales. 13Especificaciones técnicas13.1Especificaciones técnicas, parte mecánicaTab. 413.2Especificaciones técnicas, neumáticaTab. 5。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Drive1 Closed-loop control/PID controller ________________________________ B -32 Robot subsystems: Drive _____________________________________ B-21Sensors3 Characteristic curve __________________________________________ B-354 Infrared distance sensor ______________________________________ B-375 Optical proximity sensor ______________________________________ B-416 Inductive sensor ____________________________________________ B-517 Sensitive edge, collision detection ______________________________ B-538 Webcam ___________________________________________________ B-55Robotino ® View9 Generators _________________________________________________ B-57 10 Oscilloscope ________________________________________________ B-61 11 Segmenter _________________________________________________ B-65 12 Segment extractor __________________________________________ B-6913 I Ffunction _________________________________________________ B-71 14 Sign reversal _______________________________________________ B-73 15 Sequence control ____________________________________________ B-75Part B – TheoryOn machines or within systems, variables such as pressure, temperature or flow often need to be set to predefined values. Furthermore these set values should not change even in the event of any disturbances occurring. These functions are assumed by closed-loop control. Closed-loop control deals with any problems occurring in conjunction with this task. In order for a variable to be controlled, and to be available to a closed-loop controller in the form of an electrical signal, it first has to be measured and correspondingly converted. This variable needs to be compared with the specified value or the value pattern in the controller. From this comparison it is then necessary to derive the response required within the system. Finally, a suitable point must be found within the system, via which the variable can be controlled (e.g. the actuator of a heater). To be able to do so, it is important to know how the system behaves. Closed-loop control technology tries to establish the generally applicable relationships which universally occur in different technologies. Most textbooks explain this with the help of higher mathematics. This chapter is intended to explain basic terminology and information regarding closed-loop control technology so as to largely dispense with mathematics. Open-loop control The German standard DIN 19226 defines this as follows: Open-loop control is a process occurring within a system where one or several input variables exert aninfluence on other variables in the form of output variables according to the specific rules of the system.The characteristic feature of open-loop control is the open action flow, i.e. the output variable does not have any retroactive influence on the input variable.Closed-loop controlThe German standard DIN 19226 defines this as follows: Closed-loop control is a process within a system whereby the variable to be controlled (controlled variable) is continuously monitored and compared with the specified value (reference variable). Depending on the result of this comparison, the input variable of thesystem is influenced in such a manner as to bring about the adaptation of the output variable to the specified value despite any disturbances. This response brings about closed action flow.1. Closed-loop control/PID controller What is closed-loopcontrol?Open-loop control/closed-loop controltechnologyReference variable The reference variable W is also referred to as the setpoint value of the controlled variable. It specifies the desired value of the controlled variable. The reference variable can remain constant over time; but can also change over time. The desired value of the reference variable is known as the actual value. In closed-loop control the task is to keep the controlled variable at a desired value or to follow the desired value curve. This desired value is known as the reference variable. Controlled variable Definition: The aim of closed-loop control is to keep a variable at a specified value or value curve. This variable to be controlled is referred to as controlled variable x. This problem occurs in systems or on machines of most widely diverging technologies, the variable to be controlled is known as the controlled variable. Example: Speed of a DC motor See project 2 The setpoint and actual value of the speed should be set virtually the same in order to obtain optimal motion behaviour. Examples of controlled variables are: • The pressure in an air reservoir • The pressure in a hydraulic press • The temperature in an electroplating bath • The flow of coolants in a heat exchanger • The concentration of a chemical in a stirring vessel • The speed of a feed motion in machine tool using an electric drive • The speed of a motor Manipulated variable Closed-loop control can only be effected if there is a possibility of intervening in a machine or system in order to change the controlled variable. The controlled variable can be influence in any system by means of intervention. This intervention alone allows the controlled variable to be set such that it corresponds to the specified value. The variable which effects such intervention is known as the manipulated variable y. Basic terms of closed-loopcontrol technologyExamples of manipulated variables are:•The setting of an exhaust air restrictor on an air reservoir•The setting of a hydraulic pressure regulating valve•The voltage applied to the electric heating element of an electroplating bath •The setting of a flow control valve in a coolant feed line•The setting of a valve in a chemicals feed line•The voltage on the armature of a DC motorDisturbance variable zDisturbances occur in any controlled system and these are what make closed-loop control a matter of necessity. The effects of such disturbances are known as disturbance variables z.The controlled system is the part of a machine or system where the controlled variable is to be adjusted to the specified value and where the manipulated variables adjust the disturbance variables. A controlled system consists not only of the manipulated variable as an input variable, since disturbance variables also occur as input variables.System deviation xdThe comparison of reference and controlled variable is knows as system deviation . It is calculated from the difference:xd= e = W - xxdControl responseThe control response indicates how the controlled system responds to changes to the input variable. Determination of the control response is the aim of closed-loop control technology.Closed-loop controllerThe task of the closed-loop controller is to keep the controller variable as near as possible to the reference variable. The controller constantly compares the value of the controlled variable with the value of the reference variable.From this comparison and the control response, the controller determines and outputs the value of the manipulating variable.Final control element and actuatorThe final control element adjusts the controlled variable. The final control element is normally actuated by a special actuator. An actuator is always required in cases where it is not possible for the closed-loop controller to actuate the final control element directly.Measuring elementIn order to make the controlled variable accessible to the controller, it must be measured by a measuring element (sensor, transducer) and converted into a physical variable that can be processed by the controller as an input.Closed loopThe closed loop contains all components necessary for automatic closed-loop control.controlleroutput COExample -Robotino ®The function block …motor“ comprises a software controller to adjust the speed of the motor. The reference variable W of the closed-loop controller is thus identical to the setpoint speed x of the motor.• Controlled variable = Actual value of motor speedMeasurement is effected via the motor encoder.The task of a closed-loop controller is to minimise the system deviation, i.e. the deviation of the actual value from the reference variable.• The solution is effected via a PID controller:Actual value (t) + P(t) + I(t) + D(t), whereby value(t) = x(t) refers to the curent speed of motor at the time t.Also the following applies:P(t) = System deviation(t) * Kp, whereby the following scaling was carried out: System deviation(t) = (W(t) – x(t)) *255•In order to calculate the integral-action component, the last 32 system deviations are added:I(t) = Total (R(t) –R(tj)) * Ki * 100, j=0,..,31.The total should be interpreted as follows: R(t) refers to the system deviation at time t. The values R(tj) refer to the measured system deviation at previous times tj , j= 0,..,31.•The differential component is calculated via:D(t) = (R(t) – R(t-1))* KdNumerous experiments have shown that the motor controller provides excellent overall response using the valuesKp = 0.9Ki = 0.020Kd = 0ExampleDependent on the system deviation, the closed-loop controller supplies a signal to the final control element. If the system deviation is mainly in the negative direction, i.e. the measured value of the volumetric flow rate is greater than the preset value (the reference variable), the valve is further closed. If the system deviation is mainly in the positive direction, i.e. the measured value is lower than the preset value, the valve is further opened.streamGenerally it is not possible to optimally follow-up the output variable:•If intervention is too quick or sudden, the system is too heavily activated at the input. The consequence is a fluctuating response at the output.•If intervention is slow or weak, the output variable will only approximately follow the desired response.Moreover different systems, i.e. different controlled systems, also require different control strategies. Systems which involve long delays need to be controlled with care and foresight. This briefly outlines the problems of closed-loop control technology and the task facing the control engineer.disturbance (variable)PVThe following steps are required if closed-loop control is to be designed for a variable within a system:• Defining the manipulated variable (this defines the controlled system), • Determining the response of the controlled system,• To establish the control strategy for the controlled system (response of the "controller" system),• Selecting appropriate measuring and final control elements.Controlled systemsDefinition: Complex relationships exist between the manipulated variable and the controlled variable. This relationship results from the physical interdependence of the two variables. The part of the control that describes these physical processes is called the controlled system.The controlled system is the part of the machine or system in which the controlled variable is to be adjusted to the specified value and where the manipulatedvariables adjust the disturbance variables. A controlled system not only comprises the manipulated variable as input variable, since disturbance variables also occur as input variables.Before a controller can be defined for a controlled system, the behaviour of the controlled system must be known. The control engineer is not interested in the technical processes within the controlled system, but only in the system behaviour. Time response of a system Of particular importance in closed-loop control technology is the time response of a system (also known as dynamic response). This is the time characteristic of the output variable (controlled variable) for changes in the input variable. Particularly important is the response when the manipulated variable is changed. The control engineer must understand that nearly every system has a characteristic dynamic response. Step response or transient function The response of a system to a sudden change of the input variable is called the step response or transient function. Every system can be characterised by its step response. The step response also allows a system to be described using mathematical formulas. Dynamic response This description of a system is also known as dynamic response. The illustration below demonstrates this correlation. Here the manipulated variable y is suddenly increased (see diagram below). The step response of the controlled variable x is a settling process with transient overshoot.t Steady state Another description of a system is the behaviour in the steady state of the system, the static behaviour. Description of the timeresponse of control systemsStatic behaviourThe static behaviour of a system is reached when none of the variables change with time. The steady state is therefore reached only when the system has settled. This state can be maintained for an unlimited time.The output variable is still equally dependent on the input variable. This dependence is shown by the characteristic of a system.The previous section dealt with the controlled system – the part of the system which is to be controlled by a controller. This sections looks at the closed-loop controller.The controller is the device in a closed-loop system that compares the measured value (actual value) with the desired value, the setpoint value, and then calculates and outputs the manipulated variable.The above section showed that controlled systems can have very differentresponses. There are systems which respond quickly, systems that respond very slowly and systems with storage properties.In the case of each of these controlled systems, changes to the manipulated variable y must take place in a different way. For this reason there are various types ofcontroller each with its own control response. The task of the control engineer is to select the controller with the optimal control response for the controlled system.Control responseControl response is the way in which the closed-loop controller derives the manipulated variable from the system deviation.Standard linear controllers are most commonly used in industry. The transmissionratio of these controllers can be ascribed to the P-, I- and D components which represent the three basic linear forms.The PID controller is the most important standard controller since it combines the good characteristics of other controller types and is very fast and accurate. Thiscontroller combines proportional, integral and differential behaviour. If a step occurs in a signal, the controlled variable initially exhibits PD behaviour, the D-action then drops off while the I-action increases as a function of time. The characteristics are those of the individual control units:• Kp - the proportional-action component of the PID controller upstream of the motor• Ki – the integral-action component of the PID controller upstream of the motor • Kd – the differential-action component of the PID controller upstream of the motorClosed-loop controllersPID control for motor controlIn the case of the proportional controller, the control signal is calculatedproportional to the system deviation. If the system deviation is large, the value of the manipulated variable is also large. If the system deviation is small, the value of the manipulated variable is small. The time response of the P controller in the ideal state is exactly the same that of the input variable. The advantage is that the controller intervention is very fast and without delay.Water flows into a container via an inlet and forces the float upwards. The float acts on the gate valve via a lever. If water consumption is high, the gate valve has to be correspondingly opened. If consumption is low, the gate valve opens only very slightly.This means that, if water consumption is high, the level of water in the tank is also lower than if consumption is low. This is the disadvantage of a proportionalcontroller: Depending on the disturbance variable Z, the level of water in the tank varies.These controllers are generally realised electronically.drainArea of applicationProportional-action controllers are used wherever the requirements for control precision are minimal. The P controller converts a step in the input signal directly into a step in the output signal. It has a fast response behaviour.• AdvantagesThe advantages of a proportional controller are its speed and simple design. • DisadvantageThe disadvantage is that control loops using proportional controllers exhibit residual system deviation. The controlled variable (actual value) never reaches the reference variable (setpoint value).Proportional controllerExample- level controldt ArrayCOtsymbol of P-controllerTime response of a P controller:With a P controller the response of the manipulated variable y is proportional to the system deviation eThe effectiveness of an I controller increases over time. Even a slight system Integral-action controllerdeviation results in a high output signal if it exists for a sufficiently long period. Thiscontroller converts input signal jumps into ramp-type output signals by means ofcontinuous integrationThis means that changes in manipulated variables are continuous and considerablyslower than in the case of a proportional-action controller.If a constant signal is applied at the input of an integral-action controller, the outputchanges continuously until the system deviation is compensated. The manipulatedvariable of an integral-action controller is proportional to the system deviation-time-area.The greater the system deviation and system deviation over time, the steeper is theincrease in the manipulated variable. In the case of an I controller, the systemdeviation and manipulating speed of the manipulated variable are proportional,i.e. the greater the system deviation, the faster the final control element is changed.Pure integral-action controllers are rarely used since they tend towards instabilityand respond too slowly to fast changes.Area of applicationI controllers are frequently used to eliminate the disadvantage of a proportionalcontroller of not being able to fully compensate the system deviation. This is whythey are often used in combination with proportional controllers in practice.dt ArrayCOtsymbol of I-controllerTime response of an I controller:With an I controller the manipulated variable responds proportional to the area of the system deviation and timeIn some controlled system major disturbance variables can rapidly become Differential-action controllerapparent. The controlled variable deviates greatly from the reference variable withina short time. Deviations such as these can be compensated with a D controller.The output variable of a D controller is proportional to the temporal change insystem deviation. A sudden change in system deviation therefore creates aninfinitely large manipulated variable at the controller output.Area of applicationSince a D controller responds solely to the change in system deviation, it is not usedon its own. It is therefore always used in combination with a P or PI controller.A differential-action controller cannot adjust a residual system deviation and istherefore rarely used in industry.Differential-action controllers are used in combination with a proportional-action orintegral-action controller.The faster the change in system deviation occurs, the more effective a differential-action controller becomes.dt Array COtsymbol of D-controllerTime response of a differential-action controller:With a D controller, the manipulated variable is proportional to the change in system deviationSince the various types of closed-loop controller often do not exhibit the desired response for a particular control task, these are often combined. However, not all combinations of the three controller types are practical. The most frequently used combinations are: • PI controller • PD controller • PID controllertdeviationtPI-controllertPD-controllertPID-controllerdCOCOCOA PI controller combines the behaviour of the I controller and P controller whereby the advantages of both controller types are to be used: fast response of the integral-action controller and compensation of the residual system deviation of the proportional-action controller. A PI controller can therefore be used in a large number of controlled systems.Combined controllersPI controllerIn addition to proportional gain, a PI controller has a further characteristic thatindicates the behaviour of the I component: the integral-action time which providesa measure of how fast the controller resets the manipulated variable in addition tothe manipulated variable generated by the P-action to compensate a residualsystem deviation. The reset time is the period by which the PI controller is fasterthan the integral-action controller.In addition to the properties mentioned of a PI controller, a PID controller alsoPID controllerincludes the derivative-action component. This takes into account the rate of changeof the system deviation.If the system deviation is large, the D-component ensures a momentary extremelyhigh change in the manipulated variable. While the influence of the D-componentdrops off immediately, the I component increases slowly. If the system deviation isslight, the behaviour of the D-component is negligible.•AdvantageThis behaviour has the advantage of faster response in the event of changes ordisturbance variables and system deviations are therefore compensated morerapidly.•DisadvantageThe disadvantage is that the control loop is much more prone to oscillation andthe correct setting of the controller is therefore more difficult.Derivative-action timeAs a result of the D-action, this controller type is faster than a P or aPI controller. This manifests itself in the derivative-action time Tv. The derivative-action time is the period by which the PID controller is faster than the PI controller.Closed-loop control forms a components part of automated systems whose main function consists of process stabilisation. They are used with the aim of• bringing about and automatically maintaining certain process states (modes of operation)• eliminating disturbances in process sequences and• preventing the unwanted linking of subprocesses within the technical process.This method of sizing the individual components is particularly suitable in this instance since we are dealing with a simple system. First the Kp, Ki and Kdcomponents need to be roughly tuned. This is achieved by selecting the smallest possible Kp component and tuning the other two components to zero (Kp small, Kd=0 and Ki=0).The Kp component (gain) is now slowly increased until poor damping is obtained.Example - Robotino ® ViewTuning of the PID controllerIn Robotino ® View, the adjustment of the speed of a DC motor can be easily realised. The sizing of the components kp, ki, kd can be effected by means of adjusting the slides.Structuring and parameterisation of controllersSizing by means of trialPoor dampingPoor damping is obtained if oscillation is reducedDisplacement of oscillation.However if a tendency to oscillate is to occur, the Kp component must be adjustedslightly lower. The I component is then added and increased and tested in steps untilthe result virtually coincides. If the result is still not satisfactory, the D componentcan also be added. This component enables closed-loop control to become morestable. If this is the case, the Kp and Ki components can be increased once more.This is repeated until the result is absolutely satisfactory.This very practice-oriented and commonly used method of determining controllerparameters does not always provide optimum results; this result is howeveradequate in the case of this system.Other methods of tuning controller parameters are,Sizing according to:•Tuning rules•The oscillation method•Sep response•Bode diagramIndustrial robots consist of various subsystems that fulfil different function. Thetable below provides a schematic representation of these subsystems andsubfunctions. The table also provides you with the relevant references as to wherethese subsystems and subfunctions are described in the technical documentation,data sheets or in this training package.Subssystems Subfunctions Description in documentation regarding Robotino®Kinematics Establishing the spatial relationshipbetween workpiece/tool andproduction device Part B Freedom of movement of a system in the plane and within a spacePart A Project 6 and 7Drive Conversion and transfer of therequired energy to all axes of motion Part B Omnidirectional robot, multidirectional wheels, omnidirectional drivePart A Project 2 and 3Technical documentation and data sheets regarding thetopics:…DC motor, gear units, transmission,toothed-belt drive and multidirectional wheels r“Displacement encoder Measurement of the position andspeed of the individual axes ofmotionPart A Project 2 and 3Technical documentation, data sheets: Incremental encodersOpen-loop/ closed-loop control Storing, controlling and monitoringof the program sequence.Adjustment and control ofrotiational speeds and velocitiesPart B Closed-loop control technologyPart A Projects 2,3,4, 8,9Sensors Measurement of physical variablessample and position detection Part B SensorsPart A Projects 4 to 8Data sheets, technical documentationGrippers Gripping of workpiece, securingworkpiece position during travel Planned as expansion of Robotino®2. Robot subsystems: DriveThe advantage of omnidirectionally driven vehicles is that they can move in any direction without having to rotate.(= omnidirectional). The core element of an omnidirectional drive is a so-calledomnidirectional wheel or multidirectional wheel or caster, also known as omniwheel. Usually barrel-shaped, these wheels are attached to the revolving surface of the main wheel, whose axes of rotation are at a right angle to the axis of rotation of the main wheel (see illustration).Multidirectional wheels can be actively driven via the motor and also passively roll laterally via the casters integrated in the wheel.A robot does not need to turn away from the object monitored; it retains its line of visionGeneral informationregarding omnidirectional robotsDetected objectMoving with rotating (see also project 2, positional sketch)Multidirectional wheelsA multidirectional caster is moved in one direction via its drive axis and in additioncan roll in any direction by means of the other casters. Through interaction with theother two drive units, it is therefore possible to generate a direction of motion whichdeviates from that of the direction of actuation.Omnidirectional driveIf the main wheel is driven, the two auxiliary wheels lock and act as the runningsurface of the main wheel. If the drive is stopped and the vehicle moved into anotherdirection, for example via a second omniwheel attached at a right angle, theauxiliary wheels rotate and thus minimise the frictional resistance of the wheel. Thistype of design allows fast locomotion at virtually any angle to the direction of travelof the main wheel.。