tinyOS串口通信和serialforward使用
Lesson4---串口通信与SerialForwarder
groupID 00
Nodeid 00 04
counter 00 01
三、 MIG消息接口生成工具
• Listen工具是与节点通信最基本的方式,它仅仅打印 出二进制数据包到屏幕。显然,该工具不易使传感 器的数据可视化。 • 使用 mig 工具去构建一个针对消息结构的java , python或者C接口,会自动地分解信息包中的每一个 域。 • 详见 BlinkToRadio下的makefile文件。
Radio components ActiveMessageC; components new AMSenderC(AM_BLINKTORADIO MSG); BlinkToRadioC.AMSend -> AMSenderC; BlinkToRadioC.AMControl -> ActiveMessageC; Serial components SerialActiveMessageC; components new SerialAMSenderC(AM_BLINKTORA DIOMSG); BlinkToRadioC.AMSend -> SerialAMSenderC; BlinkToRadioC.AMControl -> SerialActiveMessageC;
java net.tinyos.tools.MsgReader BlinkToRadioMsg –comm +端口
三、 MIG消息接口生成工具
java net.tinyos.tools.MsgReader BlinkToRadioMrder工具
• 直接使用串行口的问题是: – 只有一个PC 程序可以与节点交互。 – 必须在真正与节点有物理连接的PC上运行应用 程序。 • SerialForwarder工具可去除这些局限性。它打开信 息包源,让众多应用程序通过TCP/IP 流连接到信 息源并使用它。 • 例如,运行SerialForwarder,它的信息包源是串行 口;而应用程序连接到SerialForwarder,而不是直 接连接的串行口,SerialForwarder扮演了一个代理 读写信息包的角色。
tinyos串行通信

分派:SerialDispatcherC
SerialDispatcherC处理协议组件接收的数据包。它使用的SendBytePacket和ReceiveBytePacket接口,并提供参数化的发送和接收接口。在发送和接收接口参数(uart_id_t)决定
message_t中的数据包格式。
们是否使用转义字节,当发送一个转义字节时,传输路径有一个字节。
当HdlcTranslateC收到一个分隔符字节,以delimiterReceived()标志。当HdlcTranslateC收到转义字节,receiveEscape标志设置为true。当它接收到任何其他字节,它测试查看是否设
的111[tep111]),这归结于知道,在message_t一个特定的数据包格式开始(根据其头的大小)。3.4节介绍了默认的TinyOS2.x的实施,SerialDispatcherC。
第2节描述了在TinyOS2.x的串行协议栈的基本结构。本节介绍了其实际执行中,包括SerialActiveMessageC,位于Dispatcher的顶部。所有的组件除UartC串行库的一部分,在
SerialDispatcherC如上层组件调用startSend()启动发送数据包,传递的第一个字节发送。SerialP收集信号nextByte()的后续字节。在nextByte处理程序或nextByte()调用之间,
上层调用completeSend()应说明数据包的结束。如果completeSend内nextByte()处理调用,SerialP会忽略nextByte()调用返回。
一个串口(UART)通信。本备忘录的文件在TinyOS2.x的串行通信协议栈的协议和结构。
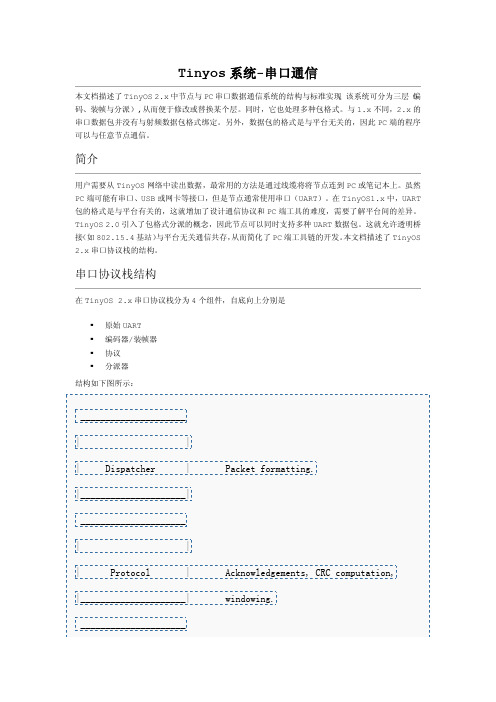
串行协议栈结构
TinyOS中节点串行通信模块分析

摘要本文主要介绍了TinyOS 2.x中节点-计算机数据交换串行通信系统的结构及其标准实现。
串行通信系统可以分为三个层次,从低到高依次为编码、构成帧和分发。
分层结构有利于试验和替换,同时便于管理多种信息包的形式。
和1.x不同,2.x 串行信息包并不一定要使用无线电包的形式。
另外,一种支持的包形式是独立于运行平台之外的,所以PC的应用程序能和任何的节点通信。
用户需要从TinyOS网络中读出数据,最常用的方法就是把节点跟PC连接在一起。
PC上的接口有串行,USB,IP,节点一般只和串口(UART)通信。
在TinyOS 1.x 中,UART信息包形式有固定的平台。
为了发现和管理平台的多样性,它使协议和PC工具变得很复杂。
TinyOS 2.x介绍了信息包分发的概念,一个节点可以同时支持多种UART信息包形式。
它允许透明桥与独立平台通信同时存在,这样可以减少PC工具链。
本文介绍了TinyOS 2.x串行通信栈的协议和结构。
关键词:微操作系统,nesC语言,无线传感器网络,串行通信AbstractThis memo d escrib es the structure and standard imp le mentatio n o f the TinyO S 2.x serial co mmun icatio n system fo r mo te-to-PC d ata exchange.The system is brok en into three levels (encod in g, framing,and d ispatch) to allo w easy exp erimentatio n and rep lacement. It can also hand le mu ltip le packet fo rmats: unl ik e 1.x, 2.x serial packets are no tbo und to the mo te's rad io p ack et fo rmat. Ad d itio nally, o ne o f thesup po rted p acket fo rmats is p latfo rm independent, so PC-sid e ap p licatio ns can co mmu nicate with arb itrary mo tes.Users need to read data o ut o f a TinyOS ne two rk. The most co mmo n app ro ach is to attach a mo te to a PC o r laptop with a wiredco nnectio n. W hile the interface o n the PC side can vary fro m a serialcab le to a US B device to IP, the mote generally talk s to a serial po rt (UART). In Tin yOS 1.x, the UART p acket fo rmat is p latfo rm-sp ecific,p ushing a good d eal o f co mp lex ity into the p ro to co l and PC-sid e too ls in ord er to d isco ver and p ro perly hand le p latform d iversity.Tin yO S 2.0 introd uces the no tio n o f p ack et fo rmat d ispatch, so a mo te can supp ort mu ltip le UART pack et formats simu ltaneo usly.This allo ws transparent brid ging (e.g., an 802.15.4 base statio n) to exist in parallel withp latfo rm-independent co mmu n icatio n, which simp lifies the PC too lchain. This memo documents the protoco ls and structure o f the TinyOS 2.x serial co mmun icatio n stack.Key Words:TinyOS,nesC,WSN,Serial Communication目录摘要……………………………………………………………………………………第一章绪论 (1)1.1 无线传感器网络及串行通信 (1)1.1.1 研究背景 (1)1.1.2 无线传感器网络概述 (1)1.1.3 无线传感器网络的特点 (2)1.2 TinyOS的简介 (4)1.2.1 TinyOS的特点 (4)1.2.2 TinyOS应用 (5)1.3 nesC语言简介 (5)1.4 主要工作 (6)1.5 组织结构 (7)第二章串行通信系统三个层次的划分 (8)2.1 简介 (8)2.2 串行栈结构 (8)2.3 串行栈的实现 (9)2.3.1 Raw UART: UartC (10)2.3.2 Enc oder/Framer:HdlcTranslateC (10)2.3.3 Protoc ol :SerialP (11)2.3.4 Dispatc her: SerialDispatcherC (13)2.3.5 SerialActiveMessageC (13)2.3.6 Packet Format (15)2.4 数据库的提取 (16)第三章串行通信应用实例分析 (17)3.1 BlinkToRadioC (17)3.2 SerialAMSenderC (23)3.2.1 AMQueueEntryP (23)3.2.2 SerialAMQunenP (24)3.3 SerialActiveMessageC (25)3.3.1 SerialDispatcherC (27)3.4 SerialAMreceiverC (29)第四章总结与展望 (31)致谢 (32)参考文献 (33)第一章绪论1.1 无线传感器网络及串行通信1.1.1 研究背景互联网为人类的生活提供了方便快捷的通信平台,成功地解决了信息交流问题。
串口助手使用教程

总结词:选择正确的串口参数
04
详细描述:根据连接的设备和通信协议的要求,选择正确 的波特率、数据位、停止位和校验位等参数。
05
总结词:保存配置
06
详细描述:完成参数设置后,记得保存配置以便下次使用 。
如何解决串口数据传输错误的问题?
总结词
检查数据完整性
详细描述
在数据传输过程中,如果发生错误,首先检查数据的完整性。确认发送的数据是否正确, 以及接收端是否完整接收。
用户需要先安装串口助 手软件,然后根据实际 硬件设备配置相应的串 口参数,如波特率、数 据位、停止位等。
通过串口助手,用户可 以发送和接收串口数据 。发送数据时,用户可 以选择文本或二进制格 式;接收数据时,软件 会自动捕获串口数据并 显示在界面上。
对于接收到的数据,用 户可以进行编辑、保存 或导出操作,方便后续 处理和分析。
如何解决串口数据传输错误的问题?
总结词
查看错误日志
详细描述
打开串口助手的错误日志功能,查看详细的 错误信息和历史记录。根据日志中的提示信 息,进一步排查问题原因。
05
总结与展望
总结串口助手的使用方法
功能介绍
安装与配置
数据发送与接收
数据编辑与保存
参数设置与调试
串口助手是一款用于串 口通信的软件,支持串 口数据的发送、接收、 查看、编辑等功能。
关闭串口
完成数据发送和接收后,点击“关闭串口”按钮。
关闭串口连接并释放相关资源。
03
串口助手的进阶功能
波特率设置
总结词
波特率是串口通信的重要参数,用于 控制数据传输速率。
详细描述
在串口助手中,您需要选择合适的波特率 以确保数据传输的稳定性和正确性。常见 的波特率有9600、19200、115200等, 根据您的设备和通信协议选择合适的值。
c++中的serialport用法
C++中的SerialPort用法一、概述在C++编程中,SerialPort(串口)是一种常用的通信方式。
它可以用于连接各种外部设备,进行数据传输和通信。
本文将详细介绍在C++中如何使用SerialPort,并且通过实例演示其用法。
二、SerialPort的基本概念1. 串口是一种通过串行通信接口进行数据传输的设备,它通过一根线缆(串口线)进行数据传输。
2. 串口通信有多种标准,如RS-232、RS-485等,不同的标准有不同的电气特性和数据传输速率。
3. 在C++中,可以使用串口库来实现串口通信,常见的串口库有Boost.Asio、Qt SerialPort等。
三、使用Boost.Asio进行串口通信Boost.Asio是一个开源的C++库,用于实现异步I/O操作。
它提供了丰富的网络和串口通信功能,可以方便地进行串口通信开发。
1. 安装Boost库在使用Boost.Asio之前,首先需要安装Boost库。
可以从Boost全球信息站(网络协议sxxx)下载最新版本的Boost库,并按照全球信息站提供的安装说明进行安装。
2. 创建SerialPort对象在C++中使用Boost.Asio库进行串口通信,首先需要创建一个SerialPort对象,并指定串口名称、波特率等参数。
```c++#include <boost/asio.hpp>using namespace boost::asio;// 创建SerialPort对象io_service io;serial_port serial(io, "COM1"); // 指定串口名称serial.set_option(serial_port::baud_rate(9600)); // 设置波特率```3. 读写串口数据创建好SerialPort对象之后,即可通过它进行串口数据的读写操作。
```c++// 向串口写入数据std::string write_data = "Hello, SerialPort!";write(serial, buffer(write_data));// 从串口读取数据char read_data[100];size_t len = read(serial, buffer(read_data, 100));```4. 异步串口通信Boost.Asio库支持异步串口通信,可以通过回调函数处理串口数据的读写操作。
serial-studio用法

Serial Studio是一款跨平台的软件,支持将串口、TCP/UDP、MQTT 等协议传输数据,并将数据可视化显示,方便嵌入式开发人员实现数据的可视化展示,呈现和分析其项目和设备生成的数据。
Serial Studio的使用方法包括以下步骤:1. 打开Serial Studio软件,选择“File”菜单下的“New”选项,然后选择“Serial Communication”或“TCP/IP Communication”来创建新的串行通信项目。
2. 在新创建的项目中,需要填写设备名称、波特率、数据位、停止位、奇偶校验等信息。
3. 在左侧的“Message Tree”窗口中,可以看到当前串行通信项目的所有数据包。
双击任何一个数据包,都可以查看其详细信息。
4. 在右侧的“Message Editor”窗口中,可以编辑和发送数据包。
在这里可以添加各种类型的数据包,比如文本、数字、布尔值等。
5. 在Serial Studio中还可以实时查看串行通信的数据。
只需要在左侧的“Message Tree”窗口中选择要查看的数据包,然后在右侧的“Message Editor”窗口中点击“Start”按钮即可。
6. 在使用Serial Studio的过程中,还可以随时修改串行通信的参数,比如波特率、数据位、停止位等。
只需要在左侧的“Serial Parameters”窗口中进行修改即可。
7. Serial Studio还支持多线程运行,可以在一个窗口中同时打开多个串行通信项目。
只需要在“View”菜单中选择“Multiple Windows”即可。
8. 在使用Serial Studio的过程中,还可以随时保存和打开串行通信项目。
只需要在“File”菜单中选择“Save”或“Open”即可。
以上是Serial Studio的基本使用方法,具体操作可能会因版本和操作系统不同而有所差异。
如果在使用过程中遇到问题,建议参考官方文档或寻求技术支持。
纳芯微的owi转串口
纳芯微的owi转串口
纳芯微的OWI(On-Wire Interface)是一种用于连接外围设备的接口技术,其中包括了转串口的功能。
转串口是指将串行数据转换为并行数据或将并行数据转换为串行数据的过程。
要实现纳芯微的OWI转串口功能,你可以按照以下步骤进行操作:
1. 首先,确保你已经有了纳芯微的OWI开发板或模块,并且已经正确连接到你的目标设备上。
2. 到纳芯微官方网站或开发者资源中心下载相关的开发文档和示例代码,以获取更详细的使用说明和示例代码。
3. 根据纳芯微的OWI规格和接口定义,配置你的开发板或模块的硬件连接和引脚分配,确保与目标设备的串口通信相匹配。
4. 在你的开发环境中,使用纳芯微提供的软件开发工具,如IDE或SDK,编写相应的代码来实现OWI转串口的功能。
这包括配置串口参数(如波特率、数据位、停止位等),发送和接收数据等操作。
5. 在代码中,根据需要使用纳芯微提供的OWI转串口的API 函数来实现具体的功能。
这些函数可以包括打开和关闭串口、发送和接收数据、设置串口参数等。
6. 编译和烧录你的代码到纳芯微的OWI开发板或模块上。
7. 运行你的代码,测试OWI转串口的功能是否正常工作。
你可以通过连接外部的串口设备(如计算机、传感器等)来进行测试。
请注意,具体的步骤和操作可能会因纳芯微的产品型号和版本而有所差异。
因此,建议你参考纳芯微提供的官方文档和技术支持资源,以确保正确地实现OWI转串口功能。
serial_port 用法
一、什么是串口串口是计算机与外部设备进行数据通信的一种接口,通过串口可以实现计算机与外部设备之间的数据传输。
通常情况下,串口包括一个发送线路和一个接收线路,用于传输数据。
串口通信可以通过物理连接或虚拟连接进行,常见的物理连接方式包括RS232,RS422和RS485等,而虚拟连接方式则包括USB转串口、蓝牙串口等。
二、串口的使用场景1. 工业控制领域在工业控制领域,串口被广泛应用于PLC(可编程逻辑控制器)、传感器、仪器仪表等设备的数据通信中。
通过串口,这些设备可以向主控计算机发送数据,或者接收主控计算机发送的控制指令,实现自动化控制。
2. 嵌入式系统开发在嵌入式系统开发中,串口通信也扮演了重要的角色。
开发人员可以通过串口与嵌入式设备进行通信,进行程序烧录、调试、数据传输等操作,方便对嵌入式设备进行控制和管理。
3. 通信设备通信设备如调制解调器、路由器等网络设备,也常使用串口进行数据传输和控制,例如通过串口进行配置、升级、诊断等操作。
4. 数据采集与监控在数据采集与监控系统中,串口可以连接各种传感器和监控设备,实现实时数据的采集和监控。
气象站、环境监测站的数据采集设备,通过串口与上位机进行数据传输。
三、串口的基本使用方法1. 串口的配置在使用串口进行通信之前,首先需要对串口进行配置,如波特率、数据位、停止位、奇偶校验等。
这些配置需要与通信的外部设备保持一致,才能够确保正常的数据传输。
2. 串口的打开和关闭在进行串口通信时,需要打开串口以建立通信连接,并在通信结束后关闭串口以释放资源,避免资源的浪费和冲突。
3. 串口的数据收发在串口通信中,数据的发送和接收是必不可少的部分。
通过串口发送数据时,需要将待发送的数据写入串口缓冲区,然后通过串口发送功能将数据发送出去;而在接收数据时,则需要通过串口接收功能从串口缓冲区中读取数据。
4. 串口的事件处理除了常规的数据收发操作,串口通信还需要处理一些事件,如串口接收到数据的事件、串口发送完成的事件等。
使用串口的流程
使用串口的流程介绍串口是一种用于在计算机和外部设备之间进行数据传输的通信接口。
它是一种一对一的全双工通信方式,可以实现数据的收发。
本文将介绍使用串口进行数据通信的基本流程。
步骤使用串口进行数据通信的流程一般包括以下几个步骤:1.打开串口:首先需要打开串口以建立与外部设备的连接。
在打开串口之前,需要先确定要使用的串口号、波特率、数据位、停止位和校验方式等参数。
2.配置串口参数:在打开串口后,需要根据实际需求配置串口的各种参数。
可以通过串口的配置接口来设置波特率、数据位、停止位和校验方式等参数。
3.发送数据:配置完串口参数后,就可以向外部设备发送数据了。
可以通过串口的发送接口将数据发送给外部设备。
在发送数据之前,需要将要发送的数据准备好,并将其转换成适合串口发送的格式。
4.接收数据:在发送完数据后,可以通过串口的接收接口来接收外部设备发送的数据。
可以通过串口的接收缓冲区来获取接收到的数据。
5.处理数据:接收到数据后,还需要对其进行处理。
可以根据实际需求对接收到的数据进行解析、处理或显示等操作。
6.关闭串口:在完成数据通信后,需要关闭串口以释放资源。
可以通过串口的关闭接口来关闭串口。
注意事项在使用串口进行数据通信时,还需要注意以下几个事项:•串口参数配置要与外部设备保持一致:在配置串口参数时,需要与外部设备的参数保持一致,否则可能会导致通信失败。
•数据格式要一致:在发送和接收数据时,要确保数据的格式一致。
可以约定好数据的格式,并在发送和接收时进行相应的转换。
•错误处理:在使用串口进行数据通信时,难免会出现一些错误。
因此,需要在程序中加入错误处理的代码,以便及时发现并处理错误。
•建立通信协议:在使用串口进行数据通信时,建议制定一套通信协议,包括数据的格式、指令的定义等。
这样可以更好地进行数据交换和数据处理。
示例代码下面是一个使用Python语言进行串口数据通信的示例代码:import serial# 打开串口ser = serial.Serial('COM1', 9600, timeout=1)# 配置串口参数ser.bytesize =8ser.stopbits =1ser.parity ='N'# 发送数据ser.write(b'Hello World')# 接收数据data = ser.readline()print(data)# 关闭串口ser.close()总结使用串口进行数据通信时,需要按照一定的流程进行操作。
串口配置使用的一般步骤及实例解读

串口配置使用的一般步骤及实例解读串口配置是在计算机与其他设备之间进行数据传输的一种常见方式。
在进行串口配置之前,我们需要确定串口的相关参数,并根据需要进行设置。
本文将介绍串口配置的一般步骤,并通过一个实例进行解读。
一般步骤如下:步骤1:确定串口的基本参数在进行串口配置之前,我们需要确定串口的基本参数,包括串口的名称、波特率、数据位、停止位和校验位等。
其中,串口的名称用于唯一标识一个串口,波特率用于表示数据传输的速度,数据位表示每个字符中数据的位数,停止位表示字符的结束位,校验位表示用于检测数据传输错误的一位。
步骤2:打开串口连接在实际使用串口之前,我们需要打开串口连接。
可以通过系统提供的串口库或API来实现。
步骤3:配置串口参数在打开串口连接后,可以通过相应的函数或方法来配置串口的参数。
不同的操作系统和编程语言可能提供了不同的方式来配置串口参数。
一般来说,可以使用相关的函数或方法来设置波特率、数据位、停止位和校验位等。
步骤4:检测串口状态在配置完串口参数之后,我们可以通过相应的函数或方法来检测串口的状态,例如检测串口是否打开、是否有数据可读等。
步骤5:进行数据传输在串口配置完成并且串口状态正常的情况下,可以进行数据传输。
可以通过写入数据到串口发送缓冲区来实现数据的发送,通过读取串口接收缓冲区来获取接收到的数据。
步骤6:关闭串口连接在数据传输完成后,应该关闭串口连接,释放相关资源。
下面是一个实例解读:假设我们需要使用串口来与一台温度传感器进行通信。
温度传感器使用一条RS232串口连接到计算机上,数据的传输速度为9600波特率,每个字符有8位数据位,1位停止位和无校验位。
首先,我们需要确定串口的名称。
假设串口的名称为COM1接下来,我们打开串口连接。
在Windows操作系统中,我们可以使用CreateFile函数来打开串口连接。
例如:```HANDLE hSerial = CreateFile("COM1", GENERIC_READ ,GENERIC_WRITE, 0, 0, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, 0);if (hSerial == INVALID_HANDLE_VALUE)//串口打开失败的处理代码```然后,我们配置串口的参数。
单片机中串口通信接口技术详解

单片机中串口通信接口技术详解串口通信是在计算机和外部设备之间进行数据传输的重要方式之一。
在单片机应用中,串口通信也扮演着十分重要的角色,提供了单片机与其他外设或者计算机之间的数据传输能力。
本文将详细介绍单片机中串口通信接口技术。
一、串口通信的基本原理串口通信是通过串行方式进行数据传输的一种通信方式。
它与并行通信相对应,串行通信只需要一根数据线,而并行通信需要多根数据线。
串口通信可以分为两类:同步串口通信和异步串口通信。
在同步串口通信中,数据传输的时钟信号由设备内部的时钟源提供,数据传输的速率由时钟源的频率决定。
而在异步串口通信中,数据传输的时钟信号和数据信号是分开的,传输速率可以根据通信双方的协商来确定。
二、串口通信的硬件实现单片机中的串口通信需要通过硬件来实现。
常见的串口通信硬件包括串口通信芯片和串口对应的引脚。
串口通信芯片常用的有MAX232、MAX3232等。
这些芯片可以将单片机的串口信号转换为标准的RS232或者RS485信号,与其他外设或者计算机进行通信。
通常,串口通信需要使用两个引脚,一个用于发送数据(TX),一个用于接收数据(RX)。
这两个引脚需要通过串口通信芯片与单片机进行连接。
三、单片机中的串口通信协议为了实现串口通信,需要定义一种通信协议来规定数据的格式和传输方式。
常见的串口通信协议有UART、SPI和I2C。
UART(Universal Asynchronous Receiver Transmitter)是最常见和简单的串口通信协议,适用于单片机与计算机之间的通信。
UART通信使用异步方式,数据传输的速率可以根据通信双方协商来确定。
SPI(Serial Peripheral Interface)是一种同步串口通信协议,适用于单片机与外设之间的通信。
SPI通信需要至少4根引脚:时钟线(SCLK)、主机输出线(MOSI)、主机输入线(MISO)和片选拉线(SS)。
SPI通信可以实现多个外设与单片机之间的通信。
TinyOS下的串口通信研究与实现
中 图分 类 号 :N 4 . 文 献 标 识 码 : 文 章 编 号 :6 3— 7 3 2 1 ) 1— 0 7— 4 T 284 A 17 4 9 ( 00 0 0 5 0
O S嵌 入 式 操 作 系 统 , iy S下 的通 信分 为 无线 通 Tn O
技术 , 通过 射频 信号 自动 识别 目标 对象 、 取对 象信 获 息 数据 ; N( WS 无线传 感 器 网络 ¨ ) 由大 量传 感 器 是
b e p le n a v rey o a d r l t r s s c e su l t r a e e r h sg iia c n ini - e n a p id i a it fh r wa e p af m u c sf ly wih g e tr s a c in fc n e a d sg f o i
Absr c : n OS i n o n s u c Op r tn y t m e eo e y UC r ee a d it S as ih t a t Ti y sa pe o r e e a i g S se d v l p d b Be k ly, n ’ lo a l t g we g n o po r e e d d s se ihta d lw we mb d e y t m s c al e in d fr W ie e s S n o Newo k. To a i ha pe ily d sg e o r l s e s r t r d y, t s
serial模块用法

serial模块用法serial模块是一个Python库,用于在计算机和其他设备之间进行串行通信。
它提供了一个简单而灵活的接口,使得开发者能够轻松地与串行设备(如串口、蓝牙设备、Arduino等)进行通信。
以下是serial模块的几个主要用法:1. 导入模块:```import serial```2. 创建串口对象:```ser = serial.Serial()```3. 配置串口参数:```ser.baudrate = 9600 # 波特率ser.port = 'COM1' # 串口号(或者设备路径,如'/dev/ttyUSB0')ser.timeout = 1 # 超时时间(秒)ser.bytesize = serial.EIGHTBITS # 数据位ser.parity = serial.PARITY_NONE # 校验位ser.stopbits = serial.STOPBITS_ONE # 停止位```4. 打开串口:```ser.open()```5. 读取数据:```data = ser.read() # 读取一个字节的数据data = ser.read(10) # 读取10个字节的数据data = ser.readline() # 读取一行数据(遇到换行符停止)```6. 写入数据:```ser.write(b'Hello') # 写入字节数据ser.write('Hello'.encode()) # 将字符串编码为字节并写入```7. 关闭串口:```ser.close()```这只是serial模块的一些基本用法,实际使用中还有很多高级功能和选项可供探索。
你可以查看serial模块的官方文档来了解更多详细信息。
tinyos系统-串口通信
|_____________________| _____________er
| | Translating raw bytes into frame delimiters, escape bytes.
|_____________________| _____________________ | | Raw UART | |
校验(CRC)码。同时,为了实现节点和主机之间的间隙检测和稳定链接,还可以发送一个序列号(默 认实现中无此功能)。 一帧发送结束并且接收到底层的最后一个 putDone()事件后,SerialP 调 用 sendCompleted()表明此帧发送成功与否。 SerialP 还负责数据包的接收工作, 并且向高层提 供 ReceiveBytePacket 接口:
同时,UartC 也可以提供多字节的 UartStream 接口,详见 TEP 低级 I/OTEP117。 另外,UartC 提供 split-phase 接口以便在 UART 空闲时发出通知信号。有时我们需要知道发送 到串口的数据已全部被传输 (比如与串口数据通路相连接无线收发机需要从发送转换到接收状态时) , 但问题是如果使用的 MCU 用的是双缓冲 UART 通信机制,那么 putDone 事件只意味着它已经准备好 接收下一字节,而不是 UART 空闲。
interface ReceiveBytePacket { async event error_t startPacket(); async event void byteReceived(uint8_t b); async event void endPacket(error_t result); }
Tinyos 系统-串口通信
本文档描述了 TinyOS 2.x 中节点与 PC 串口数据通信系统的结构与标准实现 。该系统可分为三层( 编 码、装帧与分派),从而便于修改或替换某个层。同时,它也处理多种包格式。与 1.x 不同,2.x 的 串口数据包并没有与射频数据包格式绑定。另外,数据包的格式是与平台无关的,因此 PC 端的程序 可以与任意节点通信。
单片机串口通信原理及应用实例分享

单片机串口通信原理及应用实例分享串口通信是一种常见的通信方式,它被广泛应用于单片机与外设、单片机与计算机等设备之间的数据传输。
本文将介绍单片机串口通信的原理和一些典型的应用实例。
首先,我们来了解一下单片机串口通信的原理。
串口通信是通过串行数据传输完成的,即数据一位位地按照固定的顺序传输。
单片机通常会使用UART(通用异步收发传输器)芯片来实现串口通信。
UART芯片中有两个寄存器,分别为发送寄存器和接收寄存器。
发送寄存器用于存放待发送的数据,而接收寄存器用于存放接收到的数据。
在单片机串口通信中,发送和接收的数据通过引脚进行传输。
其中,一个引脚称为TXD(发送数据线),负责将数据发送给外设或计算机;另一个引脚称为RXD(接收数据线),负责接收外设或计算机发送过来的数据。
数据的传输是通过一定的通信协议进行的,如常用的有RS232、RS485等。
下面,我们来讲解一些单片机串口通信的应用实例,以便更好地理解和应用该技术。
1. LED灯控制假设我们想要通过串口通信来控制一个LED灯的开关状态。
首先,我们需要连接单片机的TXD引脚和LED控制引脚,以便通过串口发送命令给LED灯控制。
然后,在单片机程序中,通过串口接收数据的中断服务程序接收外部发送过来的命令,根据命令的内容来控制LED灯的开关状态。
例如,当接收到字符"ON"时,将LED灯的控制引脚拉高,使其点亮;当接收到字符"OFF"时,将LED灯的控制引脚拉低,使其熄灭。
2. 温度监测与控制我们可以利用串口通信来监测和控制温度。
首先,我们需要连接温度传感器和单片机的RXD引脚,以便将温度数据传输给单片机。
然后,在单片机程序中,通过串口发送数据的函数周期性地向外部发送命令请求温度数据。
接收到温度数据后,可以根据预设的温度阈值来判断是否需要控制附加设备进行温度调节。
例如,当温度超过设定的上限值时,通过串口发送命令给风扇或空调,使其自动调整温度。
树莓派系列教程13:Serial串口

树莓派的串口默认为串口终端调试使用,如要正常使用串口则需要修改树莓派设置。
关闭串口终端调试功能后则不能再通过串口登陆访问树莓派,需从新开启后才能通过串口控制树莓派。
一、释放串口执行如下命令进入树莓派配置1 sudo raspi-config选择Advanced Options ->Serial ->no 关闭串口调试功能二、使用minicom调试串口设置完之后串口便可以正常使用了,便可测试一下树莓派的UART是否正常工作,Pioneer600扩展板带有USB转UART功能,用USB线连接到电脑。
minicom便是一个简单好用的工具。
minicom是linux平台串口调试工具,相当于windows上的串口调试助手。
1、minicom安装1 sudo apt-get install minicom2、minicom启动1 minicom -D /dev/ttyAMA0默认波特率为115200,如需设置波特率为9600加参数 -b 9600,-D代表端口,/dev/ttyAMA0 类似于windows中的COM1,同时在windows也打开串口助手。
设置波特率为115200,选择对应的串口号3、串口数据传输直接在minicom控制台中输入内容即可通过串口发送数据,在windows串口助手中会接到到输入的内容。
同理,在windows串口助手中发送数据会在minicom控制台上显示。
如果minicom打开了回显(先Ctrl+A,再E)可在控制台中观察到输出内容,如果回显关闭minicom控制台不会显示你输入的内容。
先Ctrl+A,再Q,退出minicom。
三、串口编程1、wiringPi01 #include <stdio.h>02 #include <wiringpi.h>03 #include <wiringserial.h>0405 int main()06 {07 int fd;08 if(wiringPiSetup() < 0)return 1;09 if((fd = serialOpen("/dev/ttyAMA0",115200)) < 0)return 1;10 printf("serial test start ...\n");11 serialPrintf(fd,"Hello World!!!\n");12 while(1)13 {14 serialPutchar(fd,serialGetchar(fd));15 }16 serialClose(fd);17 return 0;18 }</wiringserial.h></wiringpi.h></stdio.h>编译并执行,在window下打开串口助手会接收到” Hello World!!!”,发送数据会返回到显示窗口。
单片机串口工作原理

单片机串口工作原理
单片机串口是一种用于数据传输的通信接口,它能实现单片机与外部设备之间的数据交换。
串口的工作原理主要包括以下几个方面:
1. 时钟:串口通信需要一个时钟信号来同步发送和接收数据。
单片机通过内部或外部时钟源提供时钟信号。
2. 波特率:波特率是指每秒钟传输的位数,也就是单片机串口的传输速度。
单片机和外部设备通信时,需要设置相同的波特率,才能保证数据的正确传输。
3. 数据格式:串口通信中,通常采用的数据格式包括起始位、数据位、校验位和停止位。
起始位指示数据传输的开始,停止位指示数据传输的结束,数据位表示传输的数据长度,校验位用于检测数据传输的错误。
4. 串口寄存器:单片机内部有专门用于串口通信的寄存器,用于控制和存储串口的数据传输。
通过操作这些寄存器,单片机能够实现串口的发送和接收功能。
具体的工作流程如下:
1. 初始化:在使用串口之前,需要对串口进行初始化设置,包括波特率、数据格式等。
2. 发送数据:要发送数据,首先需要将要发送的数据存储到串
口发送寄存器中,然后通过时钟信号按照指定的数据格式将数据逐位地发送出去。
3. 接收数据:接收数据时,单片机会不断地检测串口接收寄存器中是否有新的数据到达。
如果有数据到达,单片机通过读取串口接收寄存器获取数据,并进行进一步处理。
4. 中断:为了提高效率,单片机通常会使用中断方式进行串口数据的发送和接收。
当发送或接收完成时,会触发相应的中断,单片机会在中断服务程序中进行数据的处理。
通过上述步骤,单片机能够与外部设备进行可靠的数据传输,实现各种应用功能。
单片机教程_-串口通信

单片机教程_-串口通信单片机教程串口通信在单片机的世界里,串口通信是一项至关重要的技术。
它就像是单片机与外部世界交流的“语言”,让单片机能够与其他设备进行有效的数据传输和信息交换。
无论是在工业控制、智能家居,还是在各种电子设备中,串口通信都扮演着不可或缺的角色。
接下来,让我们一起深入了解单片机中的串口通信。
首先,我们来认识一下什么是串口通信。
简单来说,串口通信是一种逐位传输数据的通信方式。
它将数据一位一位地按照顺序进行发送和接收,就像一个人在依次说出一个个的字。
与并行通信不同,并行通信是同时传输多位数据,而串口通信虽然速度相对较慢,但它的线路简单,成本较低,因此在很多应用场景中被广泛使用。
在单片机中,实现串口通信通常需要几个关键的部分。
首先是串口控制器,它负责控制数据的发送和接收。
就像是一个交通指挥员,指挥着数据的流向。
然后是串口引脚,通过这些引脚,数据得以进出单片机。
串口通信有其特定的参数设置,这包括波特率、数据位、停止位和校验位。
波特率决定了数据传输的速度,就像汽车行驶的速度一样。
常见的波特率有 9600、115200 等。
数据位则规定了每次传输的数据位数,一般有 8 位、7 位等。
停止位表示一个数据帧的结束,通常有 1 位或 2 位。
校验位用于检查数据传输过程中是否出现错误,有奇校验、偶校验和无校验等方式。
那么,如何在单片机中编程实现串口通信呢?以常见的 51 单片机为例,我们需要先对串口进行初始化设置。
这包括设置波特率、数据位、停止位和校验位等参数。
然后,在发送数据时,将要发送的数据写入特定的寄存器,单片机就会自动将数据通过串口引脚发送出去。
接收数据时,单片机会自动将接收到的数据存放到特定的寄存器中,我们只需要从这个寄存器中读取数据即可。
在实际应用中,串口通信有着广泛的用途。
比如,我们可以通过串口将单片机采集到的数据发送到电脑上进行分析和处理。
又或者,我们可以通过串口接收来自电脑或其他设备的控制指令,从而实现对单片机系统的远程控制。
串口标准例程讲解
串口标准例程讲解
串口(Serial port)是一种用于通过传输数据进行通信的接口标准。
串口通常用于连接计算机与外部设备,例如打印机、调制解调器、传感器等。
下面是一个简单的串口标准例程的讲解:
1. 设置串口参数:首先,需要设置串口的参数,包括波特率(Baud Rate)、数据位(Data Bits)、停止位(Stop Bits)和校验位(Parity)。
这些参数决定了数据的传输方式和格式。
例如,常见的设置是波特率为9600bps,数据位为8位,停止位为1位,无校验位。
2. 打开串口:使用编程语言提供的相应函数,打开串口端口,以便进行数据的收发。
在打开串口时,需要指定串口的名称或编号,例如COM1、COM2等。
3. 发送数据:使用相应的函数将数据发送到串口。
通常,需要将数据转换为字节流的形式,并指定发送的字节数。
例如,在C/C++中,可以使用write()函数发送数据。
4. 接收数据:使用相应的函数从串口接收数据。
同样地,需要指定接收的字节数,并将接收到的数据转换为合适的格式。
在C/C++中,可以使用read()函数进行数据的接收。
5. 关闭串口:在完成使用串口后,应该及时关闭串口,释放资源。
使用相应的函数关闭串口端口。
需要注意的是,在实际应用中,串口通信往往涉及更复杂的协议和数据处理。
例如,可以定义数据包的格式,添加校验和,处理数据的粘包和拆包等。
此外,还需要考虑并发访问和错误处理等情况。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TinyOs 串口通信时带有-comm项参数。
1、运行java 程序可以测试串口通信。
例如TestSerial
命令:java net.tinyos.tool.Listen -comm
serial@<prot>:<speed>
PORT 取决于平台,如果是Windows/Cygwin平台,则使用 COMN,而如果是Linux/Unix平台,则使用/dev/ttyS N。
输出时16进制的数据
例如ubuntu下 shimmer平台:
java net.tinyos.tools.Listen -comm
serial@/dev/ttyUSB0:115200
java <程序名> -comm serial@/dev/ttyUSB1:115200 输出时消息包
2、MIG消息生成工具
命令:javanet.tinyos.tools.MsgReader BlinkToRadioMsg –comm +端口
serialforward工具
命令:java net.tinyos.sf.Serialforward
–comm srial@<port>:<speed>
例如:java net.tinyos.sf.Serialforward
–comm srial/dev/ttyUSB1:115200
不同平台speed说明:
这些特定平台速率的映射关系的定义在:
support/sdk/java/net/TinyOS/packet/BaudRate.java
package net.tinyos.packet;
class BaudRate {
static void init() throws Exception {
/* The Platform.x argument is there for when this code is #include'd into C */
Platform.add(Platform.x, "mica", 19200);
Platform.add(Platform.x, "mica2", 57600);
Platform.add(Platform.x, "mica2dot", 19200);
Platform.add(Platform.x, "telos", 115200); Platform.add(Platform.x, "telosb", 115200); Platform.add(Platform.x, "tinynode", 115200); Platform.add(Platform.x, "tmote", 115200); Platform.add(Platform.x, "micaz", 57600);
Platform.add(Platform.x, "eyesIFX", 57600); Platform.add(Platform.x, "intelmote2", 115200); Platform.add(Platform.x, "iris", 57600);
Platform.add(Platform.x, "shimmer", 115200); }
}。