Jacobi迭代法
雅克比迭代法
雅克比迭代法雅克比迭代法是一种数值计算方法,用于求解非线性方程组的数值解。
它是一种层层逼近的迭代法,能够计算出不容易解析求解出的最终解。
而雅克比迭代法以德国数学家康托尔(Carl Gustav Jakob Jacobi)于1846年发明,因此也称为“Jacobi方法”或“Jacobi迭代法”。
它属于收敛性迭代,相比较其他迭代法,其优点在于可以减少有限步数达到收敛的程度。
许多工程应用要求精确地求解非线性方程组,因此雅克比迭代法受到了热烈关注,因而被广泛用于科学计算和工程问题中。
以其解决非线性方程组求解为主要应用,例如工程中的确定型求解,最佳化求解,和物理系统模拟,例如核物理、计算物理;可以满足复杂系统的非线性方程求解需求。
雅克比迭代法的四个基本步骤如下:(1)确定非线性方程组,包括初始猜测和期望的精度;(2)逐步求解非线性方程组。
计算第一步的近似解,使用Jacobi 迭代法,即:使用当前的近似解求出新的近似解;(3)根据Jacobi迭代法的收敛特性,采用误差判断准则判断结果的准确度,根据有关条件决定是否继续迭代;(4)得到足够精确的非线性方程组的解,并根据求解结果对后续工作进行分析和决策。
雅克比迭代法虽然十分有用,但仍有一些局限性。
其一,它只适用于方程组的求解;其二,它只适用于可容易矩阵求解的非线性方程;其三,它不能保证收敛而算法很难预估;最后,它的复杂度较高,求解方程组需要大量的计算。
雅克比迭代法在解决工程问题时发挥了重要作用。
它可以有效地求解非线性方程,可以用于复杂系统分析模型中。
因此,雅克比迭代法仍被广泛应用于许多不同的工程应用和科学计算中。
自雅克比迭代法发明以来,许多理论和应用都开发出来,为许多工程和科学应用提供了可靠的计算解决方案。
例如,在工程应用领域,雅克比迭代法的应用包括求解复杂的动态系统、控制系统优化设计、机械结构分析、结构设计与优化、热学模拟、流体力学、图像处理、卫星轨道动力学、经济模拟和遗传算法等。
Jacobi迭代法

Jacobi 迭代法设方程组Ax=b 中的A 是n n ⨯阶矩阵,x 和b 都是n 维列向量。
若系数矩阵A 为非奇异的且0,1,2,ii a i n ≠=L ,将A 分解为:A=D+L+U其中1122(,,,)nn D diag a a a =L21120000000n n a L a a ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦L L M M O L, 121200000n n a a a U ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦L L M M OM L 将方程组1,1,2,,nijji j a xb i n ===∑L乘以1iia ,得到等价的方程组 11(),1,2,,ni i ij j j ii j ix b a x i n a =≠=-=∑L简记为:X Bx f =+其中 B=I-D1-A=-D1-(L+U), f= D1-b我们称()x Bx f ϕ=+为迭代函数,任取初始向量(0)x x =,按照(1)()k k xBx f +=+用矩阵运算表示,完成这一步骤相当于用k L 左乘以第k-1步所形成的方程组,即形式,称这种迭代方法为Jacobi 迭代法。
Jacobi 迭代法算法简单描述:(0)(0)(0)(0)12(,,,),T n x x x x =L ( 向量初始)For 1,2,k =L For 1,2,,k n =L如果()(1)k k xx ε--≤ 停止,否则Next k用Jacobi 迭代法求解方程组实例为:1231231222213225x x x x x x x x x +-=⎧⎪++=⎨⎪++=⎩,的解,初始向量(0)(0,0,0),T x = 解 由公式知,Jacobi 迭代法为:(1)()()123(1)()()213(1)()()3121223522k k k k k k k k k x x x x x x x x x +++⎧=-+⎪=--⎨⎪=--⎩ 由初始向量(0)(0,0,0),T x=迭代可得(1)(1,3,5),T x =(2)(5,3,3),T x =--(3)(1,1,1),T x =(4)(1,1,1),T x =所以方程组的解为(1,1,1)T x =。
分别用 jacobi 迭代法和 gauss-seidel 迭代法,求解方程组
分别用 jacobi 迭代法和 gauss-seidel 迭代法,求解方程组【jacobi 迭代法和 gauss-seidel 迭代法分别应用于方程组的求解】1. 引言在数学领域中,方程组的求解一直是一个重要的课题。
为了解决复杂的线性方程组,人们提出了各种迭代方法,其中 jacobi 迭代法和gauss-seidel 迭代法是两种常见的方法。
本文将探讨这两种迭代方法在求解方程组中的应用。
2. jacobi 迭代法的原理和应用jacobi 迭代法是一种基于逐次逼近的迭代方法。
对于线性方程组AX=B,其中 A 是系数矩阵,X 是未知数向量,B 是已知向量。
我们可以通过以下公式进行逐次逼近:X(k+1) = D^(-1)*(B - (L+U)X(k))其中,D、L、U 分别是 A 的对角线、下三角和上三角矩阵。
jacobi 迭代法的优点在于易于理解和实现,但在收敛速度上较慢,需要进行多次迭代才能得到精确解。
在实际应用中,需要根据实际情况选择合适的迭代次数。
3. gauss-seidel 迭代法的原理和应用与 jacobi 迭代法类似,gauss-seidel 迭代法也是一种基于逐次逼近的迭代方法。
不同之处在于,gauss-seidel 迭代法在计算 X(k+1) 时利用了已经得到的 X(k) 的信息,即:X(k+1)_i = (B_i - Σ(A_ij*X(k+1)_j,j≠i))/A_ii这种方式使得 gauss-seidel 迭代法的收敛速度较快,通常比 jacobi 迭代法更快,尤其是对于对角占优的方程组。
4. 分别用 jacobi 迭代法和 gauss-seidel 迭代法求解方程组为了更具体地说明 jacobi 迭代法和 gauss-seidel 迭代法的应用,我们分别用这两种方法来求解以下方程组:2x1 + x2 = 9x1 + 3x2 = 11我们将该方程组写成矩阵形式 AX=B:|2 1| |x1| |9||1 3| * |x2| = |11|我们根据 jacobi 迭代法和 gauss-seidel 迭代法的原理,依次进行迭代计算,直到满足收敛条件。
jacobi迭代计算式
jacobi迭代计算式Jacobi迭代是一种求解线性方程组的迭代方法。
它可以用于求解大规模的线性方程组,并且具有较好的收敛性和稳定性。
在这篇文章中,我们将介绍Jacobi迭代的原理和应用。
我们来看一下Jacobi迭代的基本原理。
对于一个n阶线性方程组Ax=b,其中A为方阵,b为常向量,Jacobi迭代的基本思想是将方程组转化为x=D^{-1}(b-Rx),其中D为A的对角矩阵,R为A 的非对角矩阵。
然后,我们可以通过不断迭代的方式求解x的近似解。
Jacobi迭代的迭代公式为x^{(k+1)}=D^{-1}(b-Rx^{(k)}),其中x^{(k)}为第k次迭代的近似解,k为迭代次数。
通过不断迭代,我们可以得到x的逼近解。
接下来,我们来看一下Jacobi迭代的应用。
Jacobi迭代广泛应用于科学计算和工程领域,特别是在求解大规模线性方程组时具有一定的优势。
它可以用于求解电力系统潮流计算、结构力学计算、流体力学计算等领域的问题。
例如,在电力系统潮流计算中,Jacobi迭代可以用于求解节点电压和节点功率的关系。
通过迭代计算,可以得到电力系统各个节点的电压和功率的近似值,从而分析电力系统的稳定性和安全性。
Jacobi迭代还可以应用于结构力学计算中的应力分析。
通过迭代计算,可以得到结构体系中各个节点的应力分布情况,从而分析结构的强度和稳定性。
在流体力学计算中,Jacobi迭代可以用于求解流体流动的速度场和压力场。
通过迭代计算,可以得到流体流动过程中各个位置的流速和压力的近似值,从而分析流体流动的规律和特性。
需要注意的是,Jacobi迭代的收敛性和稳定性与矩阵A的特征值有关。
如果矩阵A的特征值分布不合理,Jacobi迭代可能会出现不收敛或收敛速度很慢的情况。
因此,在实际应用中,需要对矩阵A进行合理的预处理,以提高迭代的收敛性和稳定性。
Jacobi迭代是一种求解线性方程组的有效方法。
它具有较好的收敛性和稳定性,并且可以广泛应用于科学计算和工程领域。
matlab中jacobi迭代法
一、简介Matlab中jacobi迭代法是一种用于求解线性方程组的迭代方法,适用于系数矩阵为对称、正定矩阵的情况。
该迭代方法通过将系数矩阵分解为对角矩阵、上三角矩阵和下三角矩阵的形式,然后通过迭代计算得到方程组的解。
在Matlab中,可以利用矩阵运算和迭代循环来实现jacobi迭代法。
二、 jacobi迭代法原理1. 基本思想jacobi迭代法的基本思想是将系数矩阵分解为对角矩阵D、上三角矩阵U和下三角矩阵L的形式,即A=D+L+U,其中D为系数矩阵A 的对角线元素组成的对角矩阵,L为系数矩阵A的下三角部分,U为系数矩阵A的上三角部分。
令x为方程组的解向量,b为方程组的右端向量,则方程组可表示为Ax=b。
根据方程组的性质,可将方程组表示为(D+L+U)x=b,然后利用迭代的方式逐步逼近方程组的解。
2. 迭代公式假设迭代到第k次,方程组可表示为(D+L+U)x=b,将其转化为迭代形式x(k+1)=(D+L)^(-1)(b-Ux(k)),利用迭代公式可以逐步计算出方程组的解。
3. 收敛条件对于jacobi迭代法,收敛条件为系数矩阵A为对角占优矩阵或正定矩阵。
如果满足这一条件,迭代计算会逐步收敛于方程组的解。
三、 Matlab中jacobi迭代法实现在Matlab中,可以利用矩阵运算和迭代循环来实现jacobi迭代法。
具体步骤如下:1. 对系数矩阵进行分解将系数矩阵A分解为对角矩阵D、上三角矩阵U和下三角矩阵L的形式。
2. 初始化迭代变量初始化迭代的初始值x0、迭代次数k、逐次逼近解向量x(k+1)。
3. 迭代计算利用迭代公式x(k+1)=(D+L)^(-1)(b-Ux(k))来逐步计算出方程组的解。
4. 判断收敛条件在迭代计算过程中,需要实时判断迭代计算是否满足收敛条件,如果满足则停止迭代计算,得到方程组的解。
四、实例分析假设有如下方程组:2x1 + x2 + 4x3 = 103x1 + 4x2 - x3 = 10x1 + 2x2 + 3x3 = 0可以利用jacobi迭代法来求解该方程组,在Matlab中可以通过编程实现迭代计算过程。
研究生数值分析(11)---雅可比(Jacobi)迭代法
a x (k) n,n1 n1
bn )
取初始向量
X
(0)
(
x (0) 1
,
x (0) 2
,
,
x (0) n
)T
利用(4)反复迭代可以得到一个向量序列 {X (k)}
称式(4)为雅可比迭Jacobi代公式。
若记
a11
D
a22
0
a21 0
0 a12
0
L a31
a32
0
U
特征方程 I D1(L U ) 0
又可以写成 D1 D L U 0 因为 D1 0 ,所以 D L U 0 上式左端为将系数矩阵 A 的对角元同乘以 λ 后所得新矩阵的行列式。
例8 用雅可比迭代法求解方程组
10x1 2x2 x3 3 2x1 10x2 x3 15 x1 2x2 5x3 10
由迭代矩阵的特征方程
10 2 1 2 10 1 0 1 2 5
展开得到
(10 2)(50 2 10 3) 0
解得
1
1 5
, 2
1 10
7
, 3
1 10
7
于是 (J ) 1 7 0.3646 1
10
因而雅可比迭代公式是收敛的。
练习:考察用雅可比Jacobi迭代法解方程组 AX=b的收敛性,
解:相应的雅可比迭代公式为
x1(
k
1)
1 10
(2x2(k )
x (k) 3
3)
x2(k
1)
1 10
(2
x1(
k
)
x (k) 3
15)
x3(k
1)
1 5
(
x1(
雅可比迭代法
雅可比迭代法一、引言雅可比迭代法,也称为雅可比算法(Jacobi method),在科学计算领域中应用很广泛,本文重点讲述该算法在迭代进化计算中的应用。
20世纪40年代初,由美国数学家Jacobi和瑞士数学家可夫等人创造。
雅可比迭代法主要步骤如下: 1、初始化; 2、选择一种迭代策略; 3、按照迭代策略执行相应的操作,直至收敛; 4、调整参数使迭代过程收敛,得到最终的收敛速度。
下面将详细介绍这个方法的原理及过程。
1、初始化“雅可比”是一个美国人,因此他不会使用编程来实现自己的想法,但是他对于迭代法非常了解,曾经使用编程来解决两个公开的问题,一个是阿基米德与公元前250年的欧几里德的问题,另一个是荷兰金属铸件需要多少时间来铸成一个合金块。
他研究过可以提高计算效率的任何技术。
20世纪30年代初, Jacobi发现一些只能运行到第n次的迭代法并没有提供尽可能快的收敛速度。
因此,他决定编写一个运行到第n+1次的迭代法,通过检查某种程序的输入输出情况,就可以预测当前执行到哪一步。
2、选择一种迭代策略在给定初始条件,一共有m次迭代,该迭代法一定满足下列条件之一:直到十年后的1973年, Jacobi在美国数学学会会议上才正式提出了雅可比算法(Jacobi algorithm),而且仅仅限于这个算法本身,并没有对它加以推广,由此可见, Jacobi选择这样一种渐进的发展策略,也许是出于性格上的稳健吧。
3、按照迭代策略执行相应的操作如果你想设计一种运行到第n+1次的迭代法,那么你要选择使计算复杂度为O(n^n)。
的策略(L(n))。
注意(1)此处的复杂度是以数字的形式来表示的;(2)它是针对每一次迭代的计算复杂度。
然后再选择一个初值使函数值在第m次迭代时满足O(n^m)。
3、调整参数使迭代过程收敛,得到最终的收敛速度雅可比迭代法一般情况下,迭代算法的目标函数不收敛,就需要对参数进行调整,而使算法收敛,如果把迭代速度函数和梯度算法进行比较,就可以知道梯度算法存在算法收敛性问题,而雅可比迭代法是满足这一要求的。
jacobi迭代法
jacobi迭代法
Jacobi迭代法是常见的数值计算中解线性方程组的方法之一,它是一种迭代式方法。
Jacobi迭代法主要用于近似解决线性方程组,它是以变步长的简单迭代方法,以求解高维空间的线性方程组。
Jacobi迭代法的基本思想是,使用当前近似解求解未知数,其数学模型为Ax=b,将x分解为x=x0+dx,其中dx为增量,前面先确定x0,求解dx,新近似解为x0+dx。
Jacobi迭代法的具体步骤是:给定问题的数学模型Ax=b,确定初值xi(0)(i=1,2,…,n),用Aijxj(k)=bi-Σ(i≠j)Aijxj (k)计算第i个未知数的新近似解xi (k+1),代入上一次的新近似解作为右边的初值,重复上述过程,即可以得到新的xi(k+1)。
Jacobi迭代法的主要优点是计算简单,实现容易,需要的存储空间少,因此被广泛应用于解线性方程组。
但是,Jacobi迭代法的收敛性能较差,如果迭代次数太多,会使计算效率降低。
因此,Jacobi迭代法在数值计算中由其算法本身的简单性及其低纬度和低存储量得以广泛使用,其计算过程也由此得到优化。
但是,该迭代法局限于其较差的收敛性能,必须谨慎使用以防超过预定的最大迭代数。
雅可比迭代法和高斯超松弛迭代
雅可比迭代法分量形式(63)式也可改写为
(64)
(64)式更方便于编程求解。
雅可比迭代法公式简单,迭代思路明确。每迭代一次只需计算n个方程的向量乘法,程序编制时需设二个数组分别存放xk和xk+1便可实现此迭代求解。
2、高斯-赛德尔(Gauss-seidel)迭代法
由雅可比迭代法可知,在计算xk+1的过程中,采用的都是上一迭代步的结果xk。考察其计算过程,显然在计算新分量xik+1时,已经计算得到了新的分量, 。有理由认为新计算出来的分量可能比上次迭代得到的分量有所改善。希望充分利用新计算出来的分量以提高迭代解法的效率,这就是高斯-赛德尔迭代法(简称G-S迭代法)对(64)式进行改变可以得到G-S迭代法的分 量形式
(75)
其中ω称为松弛因子。
式(75)是迭代公式(74)的一个改进,可以选择松弛因子ω加速迭代过程的收敛。 式(75)的分量形式为
(76)
若对上述改进的迭代公式,按高斯-赛德尔迭代法尽量利用最新迭代得到的分量的原则,又可得到新的迭代公式
(77)
当线性方程组的系数矩阵A具有非零主元(aii≠0,i=1,2,3,…n)的特点时,可 以得到主元为1的方程组形式
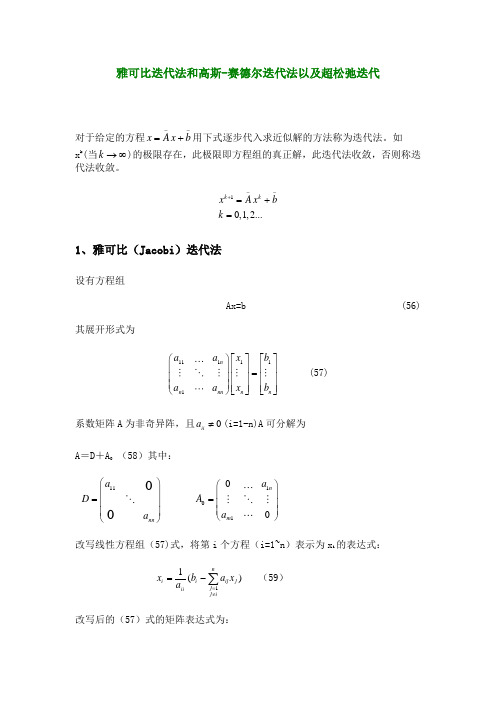
雅可比迭代法和高斯-赛德尔迭代法以及超松弛迭代
对于给定的方程 用下式逐步代入求近似解的方法称为迭代法。如xk(当 )的极限存在,此极限即方程组的真正解,此迭代法收敛,否则称迭代法收敛。
1、雅可比(Jacobi)迭代法
设有方程组
Ax=b (56)
其展开形式为
(57)
系数矩阵A为非奇异阵,且 (i=1-n)A可分解为
高斯-赛德尔迭代的矩阵形式可表达为
(69)
高斯-赛德尔迭代法每步迭代的计算量与雅可比迭代相当,但在计算机进行计算时,只需存放x一个数组。
雅可比(Jacobi)迭代法
0 a21 A a31 an1
0 a32
an2
0
ann1
a11 0
a22
0
ann
a12 0
a13 a23 0
a1n
a2n
an1n
0
记作 A = L + D + U
则 Ax b 等价于 (L D U )x b
数值计算方法
雅可比(Jacobi)迭代法
1.1雅可比迭代法算法构造
例4.2 用雅可比迭代法求解方程组
8x1 3x2 2x3 20 4x1 11x2 x3 33 6x1 3x2 12x3 36
解建:立从迭方代程公组式的三个方程中分离出 x1, x2 和 x3
x1x( k 11) xxxx32(( kk 3211))
B (I D 1 A) f D 1b
x (k 1) Bx (k ) f (k = 0,1,2…)
称为雅可比迭代公式, B称为雅可比迭代矩阵
其中
0
B
(I
D 1 A)
a21 a22
an1
ann
a12 a11
0
an2
ann
a1n a11
a2n
a22
0
在例4.2中,由迭代公式写出雅可比迭代矩阵为
i 1,2,, n
若上xia(式xkiii1称)0为ja(1解a1i1iiii方((1bb,程2ii , 组jj的,njnn1i )1Ja,aaijc分xijo(xjbk离i)j)迭)出代变i公i量式1,。21x,,2i , n , n ji
1.2 雅可比迭代法的矩阵表示
设方程组 Ax b 的系数矩阵A非奇异,且主对
雅可比(Jacobi)迭代法
高斯赛德尔迭代矩阵BG一般不容易计算,所以实际使用 时采用分量形式的算法,参见程序 GaussSeidelit2.m
例子:p.55(p.52)例8 ,10-3的精度,迭代6 次。
3x1x12xx22
5 5
x(k 1) 1
x(k) 2 3
x(k) i
(bi
a x( k1) ij j
aij
x
( j
k
)
)
/
aii
j 1
ji
不同的 的值会影响SOR迭代的收敛性、收敛 速度。
20
例(7)SOR迭代法
8 3 2 A 4 11 1
6 3 12
取 =1.5,则迭代矩阵:
1 / 2 9 / 16
3 / 8
B 3 /11 71/ 88 15 / 44
|| B || 20, || B ||1 17, || B ||2 14.4, (B) 13
不收敛。
14
(2)简单构造迭代法-2
8x1 3x2 2x3 20 4x1 11x2 x3 33 6x1 3x2 12x3 36
2
3
4x1 20 4x1 3x2 2x3
9x2 33 4x1 2x2 x3
举例:
8 4
x1 x1
3x2 2x3 11x2 x3
20 33
6 x1 3 x2 12x3 36
精确解
3 2 1
13
(1)简单迭代法
8 3 2 7 3 2 B I A I 4 11 1 4 10 1
6 3 12 6 3 11 20 b' 33 36
SOR迭 代( 1.3545), 17次 , (B) 0.452847
jacobi迭代法python代码
jacobi迭代法python代码一、什么是Jacobi迭代法?Jacobi迭代法是一种线性方程组的迭代解法,用于求解形如Ax=b的线性方程组,其中A为系数矩阵,b为常数向量。
该方法的基本思想是将A分解为D-L-U三个矩阵之和,其中D为A的对角线矩阵,L和U分别为A的下三角和上三角矩阵。
然后将Ax=b转化为(D-L-U)x=b,即Dx=(L+U)x+b。
因此可以得到迭代公式x^(k+1)=D^(-1)(L+U)x^(k)+D^(-1)b。
二、Jacobi迭代法的Python实现以下是使用Python实现Jacobi迭代法的代码:```import numpy as npdef jacobi(A, b, x0, tol=1e-6, max_iter=1000):"""Jacobi iteration method to solve Ax=b.:param A: coefficient matrix:param b: constant vector:param x0: initial guess of solution:param tol: tolerance of error:param max_iter: maximum number of iterations:return: solution vector and number of iterations"""n = len(b)D = np.diag(np.diag(A))L = -np.tril(A, k=-1)U = -np.triu(A, k=1)x = x0.copy()for k in range(max_iter):x_new = np.dot(np.linalg.inv(D), b + np.dot(L+U, x)) error = np.linalg.norm(x_new - x)if error < tol:return x_new, k+1x = x_newreturn x, max_iter```三、代码解析1. import numpy as np:导入NumPy库并使用别名np。
雅克比迭代法公式
雅克比迭代法公式
雅克比迭代法公式是一种在数学中求解不定方程的算法。
它的名字来源于著名的19世纪的德国数学家詹姆斯雅克比(JamesJakobie)。
雅克比迭代法是一种递归算法,可以求解非线性方程组的解,从而有效地求解不定方程组。
在这种算法中,我们使用递归迭代来进行求解,简单来说,就是用某种格式的解公式,以及递归公式来求解方程组。
雅克比迭代法公式是一种求解不定方程组的方法,它可以帮助我们求解某些问题中存在的不定方程,以有效地求解此类问题。
雅克比迭代法公式可以很容易地表示为:
递归公式:X_(n+1) = F(X_n),
其中,F(x)=f(x)的连续函数。
用雅克比迭代法公式求解不定方程的具体步骤如下:
(1)首先,对于一个不定方程,需要确定可能求解的迭代起点;
(2)然后,用迭代起点作为基准,构造一个新的迭代方程,即
雅克比迭代法公式;
(3)接下来,用此方程迭代求解,迭代次数根据实际情况而定;
(4)最后,通过迭代求解求得方程的解,并对其进行检验,以
确定此解是否正确。
雅克比迭代法公式的优势在于它的计算复杂度比其他方法要低,因此在求解不定方程组方面具有很大的优势。
此外,不定方程的求解过程也更简单,不需要太多的计算量。
雅克比迭代法公式一直备受追捧,它可以帮助我们在数学中有效地求解不定方程,简化计算过程。
它也被广泛应用于科学、工程、数学和计算机方面,大大减少了计算量,提高了效率。
因此,雅克比迭代法公式在求解不定方程组中发挥着重要作用,它不仅在实际应用中十分重要,而且它的应用也使得计算更加便捷,从而为人们带来了巨大的方便。
雅克比迭代法和高斯赛德尔迭代法的算法描述
雅克比迭代法和高斯赛德尔迭代法的算法描述一. 雅克比迭代法雅克比迭代法(Jacobi Iteration)是计算数值解的一种迭代方法,它遵循一个简单的步骤:给定问题的初始值,按照一定的规则,用求出某一个矩阵元素,替换当前值,得到下一个矩阵值,重复这个步骤,直到满足某一个条件,即为所求解的结果。
雅克比迭代法求解矩阵问题的一般步骤为:(1)给定初始矩阵A和右端值矩阵B,将第i行第j列的元素表示为aij,bi;(2)第i行其它元素之和定义为s(i) =∑(j≠i)|a(i, j)|,亦即∑|aij|;(3)如果s(i)不等于0,则第i行第i列元素的值更新为xi=1 (b(i) ∑(j≠i)[a(i, j)x(j)])/a(i, i)(4)重复步骤3,直到满足|X(i)X(i)|<ε(ε为设定的误差),此时x即为所求解的结果。
二. 高斯-赛德尔迭代法高斯-赛德尔迭代法(Gauss-Seidel Iteration)是另一种迭代方法,算法的基本思想也是:通过迭代,计算出当前矩阵的第i行第j列的元素xi;然后更新第i行第j列元素的值,继续迭代,直到某种条件满足,即可求出矩阵的解。
高斯-赛德尔迭代法的基本步骤为:(1)给定初始矩阵A和右端值矩阵B,将第i行第j列的元素表示为aij,bi;(2)第i行其它元素之和定义为s(i) =∑(j≠i)|a(i, j)|,亦即∑|aij|;(3)如果s(i)不等于0,则第i行第i列元素的值更新为xi=1 (b(i) ∑(j<i)[a(i, j)x(j)]∑(j>i)[a(i,j)x(j)] )/a(i, i)(4)重复步骤3,直到满足|X(i)X(i)|<ε(ε为设定的误差),此时x即为所求解的结果。
总结从上面的对比来看,雅克比迭代法和高斯赛德尔迭代法的步骤基本一致,均采用迭代的方式求解矩阵A的解X,不同的是,高斯赛德尔迭代法在更新矩阵A的第i行第i列元素时,采用把小于i的j元素的值替换成当前迭代求得的值来计算,而雅克比迭代法采用把全部j元素的值替换成当前迭代求得的值来计算。
解线性方程组的Jacobi迭代法

【解答】
迭代格式为
(k ) (k ) ⎛ 3 + 2 x2 ⎞ + x3 ⎜ ⎟ 10 ⎟ ⎛ x1( k +1) ⎞ ⎜ (k ) ⎟ ⎜ ( k +1) ⎟ ⎜ 15 + 2 x1( k ) + x3 ⎟ ⎜ x2 ⎟ = ⎜ 10 ( k +1) ⎟ ⎜ ⎟ ⎜ x3 ( ⎝ ⎠ ⎜ 10 + x k ) + 2 x ( k ) ⎟ 1 2 ⎜ ⎟ 5 ⎝ ⎠
2
end x(i)=x(i)/a(i,i); end while norm(x-x0)>e x0=x; for i=1:n x(i)=b(i); for j=1:i-1 x(i)=x(i)-a(i,j)*x0(j); end for j=i+1:n x(i)=x(i)-a(i,j) *x0(j); end x(i)=x(i)/a(i,i); end k=k+1; end disp(x); disp(p);
矩阵形式:
function [x,k]=jacobi2(A,b,x0,e) n=length(b); D=diag(A); D=diag(D); L=zeros(n,n); U=zeros(n,n); x=zeros(n,1); k=1; for i=2:n for j=1:i-1
3
L(i,j)=A(i,j); end end for i=1:n-1 for j=i+1:n U(i,j)=A(i,j); end end x=-inv(D)*(L+U)*x0+inv(D)*b; while norm(x-x0)>e x0=x; x=-inv(D)*(L+U)*x0+inv(D)*b; k=k+1; end disp(x); disp(k);
jacobi 迭代格式
jacobi 迭代格式
Jacobi迭代格式是一种用于解线性方程组的迭代方法。
它的基本思想是将线性方程组中的每个未知数分别求解出来,然后根据这些已知值更新其他未知数的近似值。
其迭代公式如下:对于线性方程组Ax = b,假设A可以表示为对角元素D和非对角元素L+U的和,其中L是严格下三角矩阵,U是严格上三角矩阵。
Jacobi迭代格式的迭代公式为:
x^(k+1) = D^(-1) * (b - (L+U)*x^k)
其中,x^(k+1)是第k+1次迭代得到的近似解,x^k是第k次迭代得到的近似解,D是对角矩阵,D^(-1)表示D的逆矩阵。
Jacobi迭代格式的算法步骤如下:
1. 初始化近似解x^0。
2. 根据迭代公式计算x^(k+1)。
3. 判断迭代结果是否满足收敛条件,如果满足则停止迭代;否则返回第2步继续迭代。
需要注意的是,Jacobi迭代格式只在系数矩阵A满足严格对角占优条件时才能保证收敛。
在实际应用中,可以通过设置迭代次数或者设定误差阈值来控制迭代的停止条件。
1。
雅克比迭代法python
雅克比迭代法python
-Jacobi迭代法是一种数值计算技术,用于求解非线性系统的迭代方法。
它将
非线性系统拆解为若干个独立的一维或二维子系统,利用迭代过程不断迭代地改进参数,最终收敛到满足约束条件的最优解。
Jacobi迭代法有利于在非线性系统中有效求解问题,它具有以下特点:
1、计算简单:Jacobi迭代法只需要计算每次迭代的细节,不需要求解任何解析表
达式,这种迭代方法可以有效地减少计算量和计算时间;
2、易编译:Jacobi迭代法只需要将等式离散化,然后对每组等式进行迭代,在程
序上比较容易编译;
3、稳定性好:Jacobi迭代法能够很快地收敛到最优解。
因此,Jacobi迭代法在不断优化的求解参数的过程中,以及优化非线性系统
的运算效率上,都具有较高的效率和准确度。
它的优势在于计算简单性和高效的稳定性,可以有效地提升计算效率,作为从大规模非线性系统中求解问题的一种技术,它在机器学习、信号处理、图像处理、线性系统控制、建模和函数优化等诸多领域都得到了广泛应用,受到学术界和实际应用界的高度重视。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一题算法解释Jacobi迭代法方程组Ax=b,其中A∈R nxn,b∈R n,且A为非奇异,则A可以写成A=D-L-U。
其中,D=diag[a11, a22,…, a nn],而-L,-U分别为A的上三角和下三角部分(不包括对角线元素)则x=D-1(L+U)x+D-1b,由此可以构造迭代法:x(k+1)=Bx(k)+f其中:B= D-1(L+U)x=I-D-1A,f=D-1b。
M文件function[x,n]=jacobi(A,b,x0,eps,varargin)%采用Jacobi迭代法求线性方程组Ax=b的解%线性方程组的系数矩阵:A%线性方程组中的常数向量:b%迭代初始向量:x0%解的精度控制:eps%迭代步数控制:varargin%线性方程组的解:x%求出所需精度的解实际的迭代步数:nif nargin==3eps=1.0e-6;M=200;elseif nargin<3errorreturnelseif nargin==5M=varargin{1};endD=diag(diag(A)); %求A的对角矩阵L=-tril(A,-1); %求A的下三角阵U=-triu(A,1); %求A的上三角阵B=D\(L+U);f=D\b;x=B*x0+f;n=1; %迭代次数%迭代过程while norm(x-x0)>=epsx0=x;x=B*x0+f;n=n+1;if(n>=M)disp('Warning:迭代次数太多,可能不收敛!');return;endendxn例题Jacobi迭代法求线性方程组实例。
用Jacobi迭代法求解以下线性方程组10x1-x2=9-x1+10x2+-2x3=7-x2+10x3=6在matlab命令窗口输入如下程序:>> a=[10 -1 0;-1 10 -2;0 -2 10];>> b=[9;7;6];>> jacobi(a,b,[0;0;0])y =0.99580.95790.7916输出的迭代次数为:n =11ans =0.99580.95790.7916n=length第二题方法一:运用戴维宁定理求出外电路的等效电压Uoc=(Z2/(Z1+Z2)-Z4/(Z3+Z4)).*Us,将电压源短路,z1,z2并联,z3,z4并联,Req=Z3.*Z4./(Z3+Z4)+Z1.*Z2./(Z1+Z2)。
所求电流源两端电压为Ut=Is.*Req+Uocw=[eps,1,2];Us=[10,10,0];Is=[5,5,0]; Z1=1./(0.5*w*j);Z4=1*w*j; Z2=[2,2,2];Z3=[2,2,2];Uoc=(Z2/(Z1+Z2)-Z4/(Z3+Z4)).*Us; Req=Z3.*Z4./(Z3+Z4)+Z1.*Z2./(Z1+Z2); Ut=Is.*Req+Uocdisp(‘ w Um phi ‘)disp([w ’,abs(u ’),angle(u ’)*180/pi])等效电路图方法二:运用电路叠加定理,分别求出电流源与电压源单独作用在所求端点两端的电压,当只有电压源作用时,电流源断路,得到Uoc=(z2./(z1+z2)-z4./(z3+z4)).*us;当只有电流源作用时,电压源短路,z1,z2并联,z3,z4并联,外加电阻R=(z3.*z4./(z3+z4)+z1.*z2./(z1+z2),电流源作用得到Uc=Is.*R。
所求端点电压为两者叠加值Ut =Uoc+Uc>> w=[eps,1,2]; %输入频率值>> us=[10,10,0]; %输入不同频率下的电压分量 >> Is=[5,0,5];>> z1=1./(0.5*w*j); >> z4=1*w*j; >> z2=[2,2,2]; >> z3=[2,2,2];>> Uoc=(z2./(z1+z2)-z4./(z3+z4)).*us; %电压源单独作用的端点电压>> Uc=Is.*(z3.*z4./(z3+z4)+z1.*z2./(z1+z2)); %电流源单独作用的端点电压 >> Ut=Uoc+Uc;>> disp([w',abs(u'),angle(u')*180/pi]) 0.0000 10.0000 0 1.0000 3.1623 -18.43492.0000 7.0711-8.1301第三题:(2)写出牛顿多项式Nk(x),k=1,2,3,4。
(3)在给定值x处求牛顿多项式Nk(x),k=1,2,3,4的值。
(4)比较(3)中的结果与实际函数值。
M文件function[P,A]=chashang(X,Y)n=length(X);A=zeros(n,n);A(:,1)=Y';for j=2:nfor i=j:nA(i,j)=(A(i,j-1)-A(i-1,j-1))/(X(i)-X(i-j+1));endendP=A(1:n,1:n)在命令窗口中输入>> X=[0 1 2 3 4];>> Y=[0 0.75 2.25 3.0 2.25];>> chashang(X,Y)P =0 0 0 0 00.7500 0.7500 0 0 02.2500 1.5000 0.3750 0 03.0000 0.7500 -0.3750 -0.2500 02.2500 -0.7500 -0.7500 -0.1250 0.0313ans =0 0 0 0 00.7500 0.7500 0 0 02.2500 1.5000 0.3750 0 03.0000 0.7500 -0.3750 -0.2500 02.2500 -0.7500 -0.7500 -0.1250 0.0313M文件function [C,A]=newtonpoly(X,Y)n=length(X);A=zeros(n,n);A(:,1)=Y';for j=2:nfor i=j:nA(i,j)=(A(i,j-1)-A(i-1,j-1))/(X(i)-X(i-j+1));endendC=A(n,n);for k=(n-1):-1:1C=conv(C,poly(X(k)));d=length(C);C(d)=C(d)+A(k,k);end在命令窗口中输入>> X=[0 1 ];>> Y=[0 0.75];>> n1=newtonpoly(X,Y)n1 =0.7500 0>> N1=poly2sym(n1)N1 =3/4*x>> X=[0 1 2];>> Y=[0 0.75 2.25];>> n2=newtonpoly(X,Y)n2 =0.3750 0.3750 0>> N2=poly2sym(n2)N2 =3/8*x^2+3/8*x>> X=[0 1 2 3];>> Y=[0 0.75 2.25 3.0];>> n3=newtonpoly(X,Y)n3 =-0.2500 1.1250 -0.1250 0>> N3=poly2sym(n3)N3 =-1/4*x^3+9/8*x^2-1/8*x>> X=[0 1 2 3 4];>> Y=[0 0.75 2.25 3.0 2.25];>> n4=newtonpoly(X,Y)n4 =0.0313 -0.4375 1.4688 -0.3125 0 >> N4=poly2sym(n4)N4 =1/32*x^4-7/16*x^3+47/32*x^2-5/16*x>> f1=polyval(n1,1.5)f1 =1.1250>> f2=polyval(n2,1.5)f2 =1.4063>> f3=polyval(n3,1.5)f3 =1.5000>> f4=polyval(n4,1.5)f4 =1.5176>> p1=polyval(n1,3.5)p1 =2.6250>> p2=polyval(n2,3.5)p2 =5.9063>> p3=polyval(n3,3.5)p3 =2.6250>> p4=polyval(n4,3.5)p4 =2.8301>> x=1.5;>> F=3*(sin(pi*x/6))^2F =1.5000>> x=3.5;>> P=3*(sin(pi*x/6))^2P =2.7990画图比较输入:x=0:0.05:4;y=3.*sin(pi.*x./6).*sin(pi.*x./6);>> plot(x,y,'r')>> hold on>> x=1.5;>> f1=1.125;>> f2=1.4063>> f3=1.500;>> f4=1.5176>> plot(x,f1,'o',x,f2,'o',x,f3,'o',x,f4,'o')>> x=3.5;>> p1=2.6250;>> p2=5.9063;>> p3=2.6250;>> p4=2.8301;>> plot(x,p1,'o',x,p2,'o',x,p3,'o',x,p4,'o') 得到如下图形。