连续搅拌反应釜的智能控制器设计
反应釜自动化控制说明
反应釜自动化控制说明一、引言反应釜是一种用于进行化学反应的设备,为了提高反应的效率和安全性,采用自动化控制系统对反应釜进行控制是非常必要的。
本文将详细介绍反应釜自动化控制系统的设计原理、控制策略和操作流程。
二、设计原理1. 反应釜自动化控制系统的设计基于PLC(可编程逻辑控制器)技术,通过传感器采集反应釜内的温度、压力、液位等参数,并根据预设的控制策略进行自动调节。
2. 控制系统通过与反应釜内的加热、冷却、搅拌等设备进行连接,实现对反应过程的精确控制。
3. 采用人机界面(HMI)作为操作界面,方便操作人员对控制系统进行监控和参数设置。
三、控制策略1. 温度控制:根据反应釜内的温度传感器实时采集的数据,控制系统自动调节加热或冷却设备的输出,使反应釜内的温度维持在设定的目标温度范围内。
2. 压力控制:通过压力传感器实时采集反应釜内的压力数据,控制系统根据预设的压力范围自动调节排气阀的开度,以保持反应釜内的压力稳定。
3. 液位控制:利用液位传感器监测反应釜内的液位变化,控制系统根据预设的液位范围自动调节进料阀和排料阀的开度,以维持反应釜内的液位在合适的范围内。
4. 搅拌控制:根据反应釜内的搅拌器转速传感器实时采集的数据,控制系统自动调节搅拌器的转速,以保证反应液体的均匀混合。
四、操作流程1. 启动系统:操作人员通过HMI界面启动反应釜自动化控制系统,系统进行自检并显示各个传感器的状态。
2. 设置参数:操作人员根据具体的反应要求,在HMI界面上设置目标温度、压力、液位和搅拌速度等参数。
3. 开始反应:操作人员确认参数设置无误后,点击“开始反应”按钮,控制系统开始监控反应釜内的温度、压力、液位和搅拌速度,并进行相应的调节。
4. 监控过程:操作人员可以通过HMI界面实时监控反应釜内各个参数的变化趋势,并根据需要随时修改参数设置。
5. 反应结束:当达到预设的反应时间或达到设定的结束条件时,控制系统自动停止加热、冷却和搅拌设备,并发出相应的提示。
理想混合连续搅拌釜式反应器(CSTR)
理想混合状态
物料在反应器内达到完全混合,不存在浓度和温度 的梯度分布。
反应器内各点的物料性质(如浓度、温度等)完全 相同,且随时间保持不变。
在理想混合状态下,反应器的性能达到最优,反应 效率和产物质量得到保证。
03
CSTR反应器的数学模型
物料平衡方程
进入反应器的物料流量与离开 反应器的物料流量相等,即输 入等于输出。
用于连续加入反应物和排出产物,实现连续化生产 。
工作流程
01
02
03
04
物料进入
反应物通过进料口连续加入反 应器内。
充分混合
在搅拌装置的作用下,物料在 反应器内充分混合,达到浓度 和温度的均匀分布。
反应进行
在适宜的反应条件下,物料在 反应器内进行化学反应。
产物排出
反应完成后,产物通过出料口 连续排出反应器。
100%
平均停留时间
表示物料在反应器内的平均停留 时间,影响反应器的生产能力和 产品质量。
80%
停留时间分布曲线
通过实验测定,可直观反映反应 器内物料的停留时间分布情况。
转化率与选择性
转化率
表示原料在反应器内转化为产 品的程度,是衡量反应器性能 的重要指标。
选择性
表示在给定转化率下,生成目 标产物的能力,反映反应器的 选择性能。
THANK YOU
感谢聆听
缺点与挑战
能耗较高
连续搅拌过程需要消耗大量能量,导致CSTR反应器的能耗相对较 高。
设备复杂度高
CSTR反应器结构复杂,涉及搅拌、传热、传质等多个过程,设备 设计、制造和维护难度较大。
放大效应
在将实验室规模的CSTR反应器放大至工业生产规模时,可能会遇到 放大效应问题,影响反应器的性能和产物质量。
反应釜自动化控制说明
反应釜自动化控制说明一、概述反应釜自动化控制系统是为了提高反应釜生产过程的自动化程度、精确度和安全性而设计的。
该系统通过采集反应釜内部的各种参数,并根据预设的控制策略,自动调节反应釜的温度、压力、搅拌速度等参数,实现对反应过程的精确控制和监测。
本文将详细介绍反应釜自动化控制系统的硬件配置、软件功能和操作流程。
二、硬件配置1. 传感器:反应釜自动化控制系统需要安装温度传感器、压力传感器、液位传感器等传感器,用于实时监测反应釜内部的各种参数。
2. 控制器:采用先进的PLC控制器作为反应釜自动化控制系统的核心控制设备,负责采集传感器数据并控制执行机构的运动。
3. 执行机构:根据控制信号,控制执行机构的运动,例如控制加热器的加热功率、控制搅拌器的转速等。
三、软件功能1. 参数设置:通过人机界面,可以设置反应釜自动化控制系统中的各项参数,包括温度设定值、压力设定值、搅拌速度设定值等。
2. 实时监测:反应釜自动化控制系统可以实时监测反应釜内部的温度、压力、液位等参数,并将数据显示在人机界面上,方便操作人员实时了解反应过程的状态。
3. 控制策略:根据预设的控制策略,反应釜自动化控制系统可以自动调节反应釜的温度、压力、搅拌速度等参数,以保持反应过程的稳定性和精确度。
4. 报警功能:当反应釜内部参数超出设定范围时,自动化控制系统会发出警报,并通过人机界面显示相应的警报信息,提醒操作人员及时处理。
四、操作流程1. 启动系统:将反应釜自动化控制系统的电源接通,并按照系统启动流程进行操作,确保系统正常运行。
2. 参数设置:通过人机界面,设置反应釜的温度设定值、压力设定值、搅拌速度设定值等参数。
3. 实时监测:在操作过程中,通过人机界面实时监测反应釜内部的温度、压力、液位等参数,并观察其变化趋势。
4. 控制调节:根据实时监测的数据和预设的控制策略,自动化控制系统会自动调节反应釜的温度、压力、搅拌速度等参数,以保持反应过程的稳定性和精确度。
连续搅拌釜式反应器(CSTR)控制系统设计 连续
连续连续搅拌釜式反应器搅拌釜式反应器搅拌釜式反应器((CSTR )控制系统设计1. 前言连续搅拌釜式反应器(continuous stirred tank reactor ,简称为CSTR )是聚合化学反应中广泛使用的一种反应器,该对象是过程工业中典型的、高度非线性的化学反应系统。
在早期反应釜的自动控制中,将单元组合仪表组成位置式控制装置,但是化学反应过程一般都有很强的非线性和时滞性,采用这种简单控制很难达到理想的控制精度。
随着计算机技术和PLC 控制器的发展,越来越多的化学反应采用计算机控制系统,控制方法主要为数字PID 控制。
但PID 控制是一种基于对象有精确数学模型的线性过程,而CSTR 模型最主要的一个特征就是非线性,因此PID 控制在这一过程中的应用受到限制。
随着现代控制理论和智能控制的发展,更加先进有效的控制方法应用于CSTR 的控制,如广义预测控制,神经模糊逆模PID 复合控制,自抗扰控制,非线性最优控制,基于逆系统方法控制,基于补偿算子的模糊神经网络控制,CSTR 的非线性H ∞控制等。
但任何一种复杂的化工反应过程都不能用一种简单的控制方式达到理想的控制效果。
目前先进的反应釜智能控制技术就是将智能控制理论和传统的控制方法相结合,如钟国情、何应坚等于1998年对基于专家系统的CSTR 控制系统进行了研究[1],宫会丽、杨树勋等于2003年发表了关于PID 参数自适应控制的新方法[2],冯斌、须文波等于1999年阐述了利用遗传算法的寻优PID 参数的模型参考自适应控制方法等[3]。
但由于这些控制方法的算法比较复杂,在算法的工程实现、现场调试及通用型方面存在着局限性,因此研究一种相对简单实用的CSTR 控制方法,更易为工程技术人员所接受。
本文在对CSTR 过程及其数学模型进行详细分析的基础上,针对过程的滞后性,采用Smith 预估算法与PID 控制相结合的方法实现CSTR 过程的控制,该方法具有实用性强及控制方法简单等特点,基于西门子PCS7系统完成了CSTR 过程控制系统设计。
反应釜自动化控制说明

反应釜自动化控制说明一、引言反应釜是一种常见的化学实验设备,用于进行化学反应和合成实验。
为了提高实验效率和确保实验的安全性,采用自动化控制系统对反应釜进行控制是非常必要的。
本文将详细介绍反应釜自动化控制系统的设计和使用方法。
二、系统设计1. 系统组成反应釜自动化控制系统主要由以下组成部分构成:- 传感器:用于实时监测反应釜内的温度、压力、液位等参数。
- 控制器:根据传感器的反馈信号,对反应釜内的温度、压力、搅拌速度等进行控制。
- 执行机构:根据控制器的指令,控制反应釜内的加热、冷却、搅拌等操作。
- 人机界面:提供操作界面,方便用户对反应釜进行参数设置和监控。
2. 控制策略反应釜自动化控制系统采用PID控制策略,即比例、积分、微分控制。
该控制策略可以根据反应釜内的实时参数变化,自动调整控制器的输出信号,以实现对反应釜内参数的精确控制。
3. 控制模式反应釜自动化控制系统可以采用手动控制模式和自动控制模式。
在手动控制模式下,用户可以通过人机界面手动设置反应釜内的温度、压力、搅拌速度等参数。
在自动控制模式下,系统将根据预设的控制策略自动调整参数,实现自动化控制。
三、系统使用方法1. 系统启动将反应釜自动化控制系统的电源接通,并按下启动按钮。
系统将进行自检,确保各个传感器和执行机构正常工作。
2. 参数设置在人机界面上设置反应釜的目标温度、目标压力、搅拌速度等参数。
系统将根据这些参数进行控制。
3. 控制模式切换根据实验需求,选择手动控制模式或自动控制模式。
在手动控制模式下,用户可以通过人机界面手动调整反应釜内的参数。
在自动控制模式下,系统将根据预设的控制策略自动调整参数。
4. 实验监控在实验过程中,通过人机界面实时监测反应釜内的温度、压力、液位等参数。
系统会根据传感器的反馈信号进行实时控制,确保实验的安全和稳定进行。
5. 实验结束实验结束后,将反应釜自动化控制系统的电源关闭,并进行必要的清洁和维护工作。
四、系统优势1. 提高实验效率:自动化控制系统可以根据预设的控制策略,自动调整反应釜内的参数,提高实验的效率。
连续搅拌釜式反应器(CSTR)控制系统设计 连续
连续连续搅拌釜式反应器搅拌釜式反应器搅拌釜式反应器((CSTR )控制系统设计1. 前言连续搅拌釜式反应器(continuous stirred tank reactor ,简称为CSTR )是聚合化学反应中广泛使用的一种反应器,该对象是过程工业中典型的、高度非线性的化学反应系统。
在早期反应釜的自动控制中,将单元组合仪表组成位置式控制装置,但是化学反应过程一般都有很强的非线性和时滞性,采用这种简单控制很难达到理想的控制精度。
随着计算机技术和PLC 控制器的发展,越来越多的化学反应采用计算机控制系统,控制方法主要为数字PID 控制。
但PID 控制是一种基于对象有精确数学模型的线性过程,而CSTR 模型最主要的一个特征就是非线性,因此PID 控制在这一过程中的应用受到限制。
随着现代控制理论和智能控制的发展,更加先进有效的控制方法应用于CSTR 的控制,如广义预测控制,神经模糊逆模PID 复合控制,自抗扰控制,非线性最优控制,基于逆系统方法控制,基于补偿算子的模糊神经网络控制,CSTR 的非线性H ∞控制等。
但任何一种复杂的化工反应过程都不能用一种简单的控制方式达到理想的控制效果。
目前先进的反应釜智能控制技术就是将智能控制理论和传统的控制方法相结合,如钟国情、何应坚等于1998年对基于专家系统的CSTR 控制系统进行了研究[1],宫会丽、杨树勋等于2003年发表了关于PID 参数自适应控制的新方法[2],冯斌、须文波等于1999年阐述了利用遗传算法的寻优PID 参数的模型参考自适应控制方法等[3]。
但由于这些控制方法的算法比较复杂,在算法的工程实现、现场调试及通用型方面存在着局限性,因此研究一种相对简单实用的CSTR 控制方法,更易为工程技术人员所接受。
本文在对CSTR 过程及其数学模型进行详细分析的基础上,针对过程的滞后性,采用Smith 预估算法与PID 控制相结合的方法实现CSTR 过程的控制,该方法具有实用性强及控制方法简单等特点,基于西门子PCS7系统完成了CSTR 过程控制系统设计。
连续搅拌釜式反应器(CTRS)控制系统设计

河南工业大学开放实验室实验项目设计报告连续搅拌釜式反应器(CTRS)控制系统设计学校:河南工业大学学院:机电工程学院专业:机械设计制造及其自动化姓名:X X X学号:目录1 前言 (2)2 工艺过程简介 (2)2、1 过程变量说明 (3)2、2 操作变量说明 (3)3 反应过程特性 (3)4 实验内容 (5)5 反应过程开车及正常运行 (6)6 开车步骤顺序控制 (7)7 思考题 (8)8 心得体会 (9)连续搅拌釜式反应器(CTRS)控制系统设计1、前言本连续反应过程是工业常见的典型的带搅拌的釜式反应器(CSTR)系统,同时又是高分子聚合反应。
本实验是当前全实物实验根本无法进行的复杂、高危险性实验,又是非常重要的基础反应动力学实验和反应系统控制实验内容。
此外,全实物实验还面临物料消耗、能量消耗、反应产物的处理、废气废液的处理和环境污染问题,以上各项问题比间歇反应更严重,因为连续反应的处理量大大超过间歇过程。
现有的连续反应实验系统实际上都是水位及流量系统,根本没有反应现象。
在本连续反应实验系统上除了进行常规控制系统实验外,还可以进行模糊控制、优化控制、深层知识专家系统(例如SDG法)故障诊断等高级控制实验。
2、工艺过程简介连续反应实验系统以液态丙烯为单体、以液态已烷为溶剂,在催化剂与活化剂的作用下,在反应温度70 1.0℃下进行悬浮聚合反应,得到聚丙烯产品。
在工业生产中为了提高产量,常用两釜或多釜串联流程。
由于在每一个反应釜中的动态过程内容相似,为了提高实验效率、节省实验时间,特将多釜反应器简化为单反应器连续操作系统。
丙烯聚合反应是在己烷溶剂中进行的,采用了高效、高定向性催化剂。
己烷溶剂是反应生成物聚丙烯的载体,不参与反应,反应生成的聚丙烯不溶于单体丙烯和溶剂,反应器内的物料为淤浆状,故称此反应为溶剂淤浆法聚合。
见图1-1所示,连续反应实验系统包括:带搅拌器的釜式反应器。
反应器为标准盆头釜,为了缩短实验时间,必须减小时间常数,亦即缩小反应器容积,缩小后的反应器尺寸为:直径1000 mm,釜底到上端盖法兰高度1376 mm,反应器总容积1.037 m3 ,反应釜液位量程选定为0-1300 mm (0-100%)。
2.5 理想混合连续搅拌釜式反应器(CSTR)
将出口处的浓度、温度等参数代入得到出口处反应速率,将其代入基础
设计式即得。
如:恒温恒容不可逆反应
1 k
CA0 xA
n=0 n=1
CA0 xA kCA0 (1 xA)
xA k(1 xA)
n=2
CA0 xA
kC
2 A0
(1
xA )2
kCA0
x
A
(1
x
A
)2
图解法
在连续操作釜式反应器内,过程参数与空间位置、时间无关, 各处的物料组成和温度都是相同的,且等于出口处的组成和温度。
连续操作釜式反应器适用于产量大的产品生产,特别适宜对温 度敏感的化学反应。容易自动控制,操作简单,节省人力。稳定性 好,操作安全。
单个连续操作釜式反应器(1-CSTR)
基础设计式
连续操作釜式反应器 单个连续釜 多个串联连续釜
理想混合连续搅拌釜式反应器(CSTR)
连续操作釜式反应器的结构和间歇操作釜式反应器相同,但进 出物料的操作是连续的,即一边连续恒定地向反应器内加入反应物, 同时连续不断地把反应产物引出反应器。这样的流动状况很接近理 想混合流动模型或全混流模型。
例3-5、例3-6讲解
多个串联连续操作釜式反应器(N-CSTR)
为什么要采用N-CSTR代替1-CSTR?
由于1-CSTR存在严重的返混,降低了反应速率,同时容易在某些反应中导 致副反应的增加。
为了降低逆向混合的程度,又发挥其优点,可采用N-CSTR,这样可以使 物料浓度呈阶梯状下降,有效提高反应速率;
例题讲解。
图解法
适用于级数较高的化学反应,特别适于非一、二级反应,但只适于(rA)能用单一组分表示的简单反应,对复杂反应不适用。
反应釜物料搅拌变频调速控制

摘要随着近代工业技术的发展,反应釜物料搅拌技术也得到了迅速的发展,它广泛应用与化学工艺与生产中,但在应用中,传统的物料搅拌工艺也存在严重的问题和产能的制约。
PLC是以计算机技术为核心的通用自动控制装置,也可以说它是一种用程序来改变控制功能的计算机。
随着微处理器、计算机和通信技术的飞速发展,可编程序控制器PLC已在工业控制中得到广泛应用,而且所占比重在迅速的上升。
PLC主要由CPU模块、输入模块、输出模块和编程装置组成。
它应用于工业混合搅拌设备,使得搅拌过程实现了自动化控制、并且提升了搅拌设备工作的稳定性,为搅拌机械顺利、有序、准确的工作创造了有力的保障。
本文介绍的反应釜物料搅拌系统以PLC作为控制核心,结合变频器等完成物料搅拌的自动控制系统,能够较好的满足搅拌系统的要求。
关键词:可编程控制器PLC;变频器;电动调节阀;反应釜物料搅拌系统;PID控制;电动调节阀目录第一章绪论 (1)1.1引言 (1)1.2引入PLC来实现反应釜物料控制功能 (1)第二章总体方案设计 (2)2.1 系统方案的设计思想 (2)2.2、系统设计 (2)2.2.1、固体物料A的给料控制方式与计量 (3)2.2.2、液体进料量的控制方式与计量 (4)2.2.3、混合设备的控制 (4)2.2.4、控制方案 (4)第三章硬件设计 (6)3.1 硬件系统构成原理 (6)3.2 硬件系统器件选型 (7)3.2.1、PLC机型选择 (7)3.2.2、变频器的选择 (11)3.2.3、电动调节阀的选择 (11)3.2.4液位传感器的选择 (13)3.2.5 、电子皮带秤的选择 (13)3.2.6 、电动机选型 (14)3.2.7、电磁流量计选型 (14)3.3、硬件系统设计 (14)3.3.1、物料A的控制方式: (15)3.3.2、物料B的控制方式 (16)3.3.3、 PLC控制系统设计 (17)3.4、系统安全性,可靠性、实用性设计 (19)3.4.1、断路器的选择 (19)3.4.2、熔断器的选择 (20)3.4.3、接触器 (20)3.4.4、热继电器的选择 (21)3.4.5、按钮选型 (22)第四章程序设计 (23)4.1 PLC编程语言 (23)4.2设计程序的流程图 (24)4.3 程序梯形图 (25)总结 (29)参考文献 (30)第一章绪论反应釜搅拌作为工艺过程的基础操作单元,广泛应用于石油、化工、医药、食品、油漆、涂料等许多行业。
反应釜PLC智能控制系统设计毕业论文
反应釜PLC智能控制系统设计毕业论文目录第一章概述 (2)1.1PLC的结构与特点 (2)1.1.1 PLC的基本结构 (3)1.1.2 PLC的特点 (3)1.2PLC的发展趋势 (5)第二章硬件设计 (5)2.1总体方案设计 (5)2.2.1 总体方案介绍 (6)2.2液体混合器总体结构 (7)2.3液位传感器的选择 (8)2.4搅拌机的选择 (8)2.5电磁阀的选择 (10)2.6接触器的选择 (10)2.7热继电器的选择 (12)2.8PLC的选择 (12)第三章程序设计 (15)3.1功能图 (15)3.2梯形图 (16)3.3PLC输人、输出地址分配 (17)3.4液体混合器输入输出接线图 (18)3.5手动控制 (18)第四章基于MCGS的监控系统设计 (19)4.1什么是MCGS组态软件 (19)4.2MCGS组态软件系统构成 (19)4.2.1 MCGS组态软件的整体结构 (19)4.2.2 MCGS组态软件五大组成部分 (20)4.3MCGS组态软件的特点及选型 (21)4.3.1 MCGS的主要特点 (21)4.3.2 MCGS的选型 (21)4.4基于MCGS的反应釜监控系统设计 (23)4.4.1组建系统工程 (23)4.4.2画面中构件的属性设置 (24)第五章 MCGS与PLC通信及工程模拟 (27)5.1制作动画显示画面 (27)5.2脚本程序编写 (28)5.3建立设备构件 (29)5.4程序下载整体运行与综合测试 (30)总结 (32)参考文献 (33)致谢 (34)第一章概述1.1 PLC的结构与特点随着微处理器、计算机和数字通信技术的飞速发展,计算机控制已经广泛应用在所有的工业领域。
现代社会要求制造业对市场需求作出迅速的反应,生产出小批量、多品种、多规格、低成本和高质量的产品。
为了满足这一要求,生产设备和自动生产线的控制系统必须具有极高的可靠性和灵活性。
可编程控制器(Programmable Logic Controller)正是顺应了这一要求出现的,它是以微处理器为基础的通用工业控制装置。
反应器控制系统设计
Keywords:temperature,reactor,cascade PID,Siemens S7-200 PLC,Force Control
1
1.1
1.1.1
反应器,是任何化学品生产过程中的关键设备,主要给化学反应的介质提供场所,决定了化工产品的品质、品种和生产能力。不同的生产过程和生产工艺所使用的反应器类型也不同,因此反应器种类很多。就结构形式看,有釜式、管式、塔式、固定床、流化床反应器等;按传热情况看,分为绝热式和非绝热式反应器。釜式反应器有两种操作方式:连续生产和间歇生产。
6251组态软件选择6252组态界面设计6353系统仿真设计68参考文献69致谢70附录71附录a外文文献71附录b中文翻译81山东科技大学学士学位论文绪论绪论11课题研究背景及意义111反应器概述反应器是任何化学品生产过程中的关键设备主要给化学反应的介质提供场所决定了化工产品的品质品种和生产能力
连续搅拌反应釜过程的闭环增益成形PID控制器设计
( .T a hn n e a c et n3 3 h eo dA tl yE g n e n o e e ia h a x 1 0 5 hn ; 1 e c i a d R s rhS c o 0 ,T eS cn r l r n i r g C l g ,X ’ n S a n i 0 2 ,C ia g e i ie ei l 7
3 heScn rlr n i e n einn cdm ,B in 0 0 ,C ia .T eodAtl yE gn r gD s igA a e e ei 10 ie e i g jg 1 1 hn )
Ab ta t osletec n o po lm o o t u u —t rdT n — e c r( S R ,as a h ow r I ei a e s c :T o o t l rbe f ni o sSi e —a k R a t C T ) t i t r ad P D d s n b sd r v h r C n r o rgf g
Vo . 131 No. 2 Fe 201 b. 1
文 章 编 号 :0 1 9 8 ( 0 1 0 0 8 0 10 — 0 1 2 1 ) 2— 4 3— 2
di1 .7 4 S ..0 7 2 1 .0 8 o:0 3 2/ P J 18 .0 0 4 3 1
连 续 搅 拌 反 应 釜 过 程 的 闭 环 增 益 成 形 PD 控 制 器 设 计 I
和 P D控 制 器 构 成 实 际 闭环 回路 传 递 函数 。然 后 , 较 期 望 闭环 回 路 传 递 函 数 和 实 际 闭 环 回路 传 递 函数 , 可 确 定 I 比 即
连续搅拌反应釜系统的设计与仿真

吉林化工学院毕业设计说明书连续搅拌反应釜系统的控制器设计与仿真Controller Design and Simulation for CSTR学生学号:11510210学生姓名:严新宇专业班级:自动1102指导教师:王野职称:工程师起止日期:2015.03.09~2015.06.26吉林化工学院Jilin Institute of Chemical Technology摘要连续搅拌反应釜(CSTR)是发酵、化工、石油生产、生物制药等工业生产过程中应用最广泛的一种化学反应器,其控制质量直接影响到生产的效益和质量指标。
对连续搅拌反应釜通过控制内部的工艺参数,如温度、压力、浓度等稳定,保证反应的正常运行。
本文针对连续搅拌反应釜的数学模型,应用泰勒展开得到了线性状态空间表达式,在此基础上设计了LQR控制器,仿真结果表明,控制效果令人满意。
本设计将CSTR的非线性动态模型进行了输入输出线性化,得到CSTR线性状态空间模型。
设计出连续搅拌反应釜的极点配置控制器并对系统进行仿真。
设计出连续搅拌反应釜的LQR控制器并对其系统进行仿真。
并对两种控制方法的控制效果进行了比较。
关键词:连续反应搅拌釜;LQR控制器;MATLAB仿真AbstractContinuous stirred tank reactor (CSTR) is the most widely used in fermentation, chemical engineering, petroleum production, bio pharmaceutical and other industrial production process as a chemical reactor, control the quality directly affect the production efficiency and quality index. For continuous stirred tank reactor by controlling the process parameters, such as temperature, pressure, concentration and so on, ensure the normal operation of the reaction. In this paper, based on a continuous stirred reactor mathematical model, the application of Taylor expansion is obtained for the linear state space representation, on this basis, design the LQR controller. Simulation results show that the control effect is satisfactory.In this paper, the nonlinear dynamic model of CSTR is linearized, and the CSTR linear state space model is obtained. The pole assignment controller for continuous stirred tank reactor was designed and the simulation of the system was carried out. The LQR controller of the continuous stirred tank reactor is designed and the system is simulated. The control effect of the two control methods is compared.Key Words: Continuous Stirred Tank; LQR Controller; MATLAB Simulation目录摘要 (I)Abstract ......................................................................................................................................................... I I 第1章绪论 (2)1.1 课题背景及目的意义 (2)1.2 国内研究现状 (2)1.3 国外研究现状 (3)1.4 连续反应搅拌釜的控制技术 (4)1.5 仿真技术 (4)1.5.1 数字仿真概述 (4)1.5.2 MATLAB仿真软件 (8)1.6本设计的主要研究内容 (10)第2章连续搅拌反应釜的数学模型 (12)2.1 连续搅拌反应釜结构 (12)2.2 连续搅拌反应釜仿真模型的建立 (14)2.3 非线性模型的线性化 (17)第3章极点配置控制器的设计与仿真 (19)3.1 极点配置 (19)3.2 极点配置控制器的设计 (19)3.2.1 极点配置控制算法 (19)3.2.2 CSTR极点配置控制器设计 (20)第4章LQR控制器的设计与仿真 (25)4.1 LQR控制器的介绍 (25)4.2 LQR控制器的原理 (25)4.3 LQR控制器的设计 (26)4.4 两种控制器效果对比 (29)结论 (31)参考文献 (32)附录Ⅰ线性化程序 (33)致谢 (35)第1章绪论1.1 课题背景及目的意义连续搅拌反应釜是化工生产中的常用设备,同时又是典型的非线性被控对象。
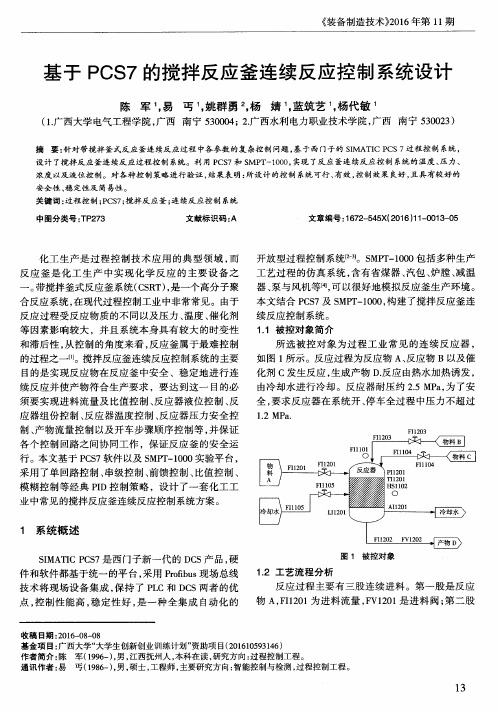
基于PCS7的搅拌反应釜连续反应控制系统设计
化 工 生 产 是 过 程 控 制 技 术 应 用 的典 型 领 域 , 而
一
开放 型过 程 控制 系 统 f 2 _ 3 I 。S MP T 一 1 0 0 0包 括 多种 生 产
反应 釜是化 工生 产 中实现化 学反应 的主要设 备之 工艺过程 的仿真系统 , 含有省煤器 、 汽包 、 炉膛 、 减温 泵 与 风 机 等[ 4 1 , 可 以很 好 地 模 拟 反应 釜 生 产 环 境 。 带 搅拌 釜 式反 应 釜 系统 ( C S R T) , 是 一个 高 分 子 聚 器 、
基金项 目: 广西大学“ 大学生创新创业训练计划 ” 资助项 目( 2 0 1 6 1 0 5 9 3 1 4 6 ) 作者简介 : 陈 军( 1 9 9 6 一 ) , 男, 江西抚州人 , 本科在读 , 研究方 向 : 过程控制工程 。 通讯作者 : 易 丐( 1 9 8 6 一 ) , 男, 硕士 , 工程师 , 主要研究方 向 : 智能控制与检测 , 过程控制 工程 。
1 3
E q u i p me n t Ma n u f a c t u r i n g T e c h n o l o g y No . 1 1 , 2 01 6
是 反 应 物 B, F I 1 2 0 3为 进 料 流量 , F V 1 2 0 3是 进 料 阀 ;
性 与独立性 ; ( 2 ) 所 选 被 控 变 量 能 满 足 生 产 工 艺 稳
1 . 2 工 艺 流程 分 析
反 应 过 程 主要 有 三股 连 续 进 料 。第 一 股 是 反应
F I 1 2 0 1 为进料流量 , F V 1 2 0 1 是进料阀 ; 第 二股 点, 控制性 能高 , 稳定性好 , 是一种全集成 自动化 的 物 A,
连续搅拌反应釜系统的设计与仿真
由于化学反应类型不同,物料的相态不同,反应条件差别很大,按照反应器的进出物料的状况,可将反应器分为间歇式、半间歇式、和连续式,连续反应器是工业生产过程中最常用、最普遍采用的以上方式,连续反应器为了保证反应的正常进行,需要对反应器中的某些关键工艺参加如温度、压力、浓度灯进行控制使系统稳定,通常的控制使采用定值控制,从反应器的传热来分,又可分为绝热式和非绝热式反应器,按操作方式分,又可分为连续操作,间歇操作和半间歇操作。从结构上分有釜式、管式、固定床和流化床等;釜式反应器又是工业上广泛采用的一种形式,可采用进行匀相反应,也可进行多相反应,如液固、气液、液液及气固液灯反应,釜式反应器内部有搅拌装置,可以使反应器中反应区的反应物料的浓度均一。
反应釜系统,杨爱新对该对象进行动态机理建模,建立的模型符合现场实际的情况,同时利用该模型来研究当操作条件改变时,聚合物体积浓度百分比、反应物浓度、反应速率、冷却水出口温度以及反应体系温度的变化。
2.连续搅拌反应釜系统的控制方面
雷佳等充分利用遗传算法的寻优特性,提出了一种与PID控制相结合的遗传寻优算法,明显地提高了控制效果;以工业现场实际情况为背景,通过改进跟踪微分器,设计了一种二阶白抗扰控制方法,明显提高了工业现场连续搅拌反应釜的控制效果;朱学峰根据连续搅拌反应釜系统的非线性特性,提出了基于混合模型的非线性预测控制策略,此混合模型由非线性和线性两个部分组成,通过其仿真也可看出实际输出与模型输出误差较小;吴伟林提出了一种基于神经元网络的自适应控制方法,该方法有效改善了反应釜温度的大时滞问题,能够对反应釜温度进行有效地控制;刘士荣应用了一种模糊逆模一PID与神经网络相结合的复合控制策略,对反应釜温度控制获得了良好的控制效果;韩光信等提出了应用于连续搅拌反应釜的非线性鲁棒控制,对开车过程进行了优化;针对连续搅拌反应釜系统,贾爱民提出了一种鲁棒控制算法,该算法具有较强的适应性能和较强的抗干扰能力,能够满足实时控制的要求。
连续搅拌釜式反应器的自适应预测控制器的设计.
连续搅拌釜式反应器的自适应预测控制器的设计摘要:本文主要论述了自适应预测控制器的设计。
该预测控制器模型是基于线性模型和运用适应机制设计而成的。
它可以被应用于非线性系统。
在回归最小二乘法的每一次抽样中,大家建议把区分线性函数模型的范围作为自适应技巧。
这种方法可作为一种非线性MIMO 系统应用于某一CSTR,这一系统包含很多可以测量到的干扰因素。
模拟可在正常工作状态或有干扰因素影响的的状态下进行。
关键词:模型预测控制自适应CSTR1. 介绍一些流程工业如化工和石化厂有特别的应用,简单的产品规格控制算法无法完全涉及控制和经济要求的每一个方面。
其中的一些规格多是非线性的,互动的,多变的以及存在干扰因素的。
然而,在这些系统的自动化等级结构中,先进过程控制的应用除使控制和产品达到要求外,还带来很大的经济利益。
任何先进过程控制法的支柱是模型预测控制[1]。
MPC(模型预测控制),是指一种计算,它估算一系列不同可操控的调整,使某一工厂运行良好。
它最初是为了满足特殊的控制需求的发电厂和石油精炼厂研制而成,现在被广泛应用于不同领域,包括化学品、石油化工、食品加工,汽车、航空航天、冶金、纸浆和造纸[2、3、4]。
对于MPC的理论问题,几位作者发表了极棒的评论,提出了经销商对工业MPC技术的观点,并总结了未来可能会出现的发展。
考虑到系统的非线性、线性模型的弱点,使人们从1990年开始研究非线性模型在MPC 中的应用。
到目前为止,许多MPC & NMPC方法的实施方案(非线性MPC)已经被报道。
[2、4]这使我们对商业上可用的MPC和NMPC技术有了一个全面的了解。
根据多种操作点新情况的发生的线性模型的改变是来扩展控制器非线性的线性系统的解决方案。
在本文中,我们把CSTR看作为一个高度非线性系统。
我们的模型预测控制器是基于一种(汽车ARMAX回归滑动平均与外部输入)模型的时候它的参数根据新的操作条件变化在恰当的位置。
连续搅拌釜式反应器设计

专业:化学工程与工艺目录一、设计任务.............................................................................................................................. - 1 -二、确定反应器及各种条件...................................................................................................... - 1 -三、反应釜相关数据的计算...................................................................................................... - 1 -1.体积................................................................................................................................... - 1 -2.内筒的高度和内径........................................................................................................... - 2 -3.内筒的壁厚....................................................................................................................... - 2 -四、夹套的计算.......................................................................................................................... - 3 -1.夹套的内径和高度........................................................................................................... - 3 -2.夹套壁厚........................................................................................................................... - 3 -五、换热计算.............................................................................................................................. - 3 -1.所需的换热面积............................................................................................................... - 3 -2.实际换热面积................................................................................................................... - 4 -3.冷却水流量....................................................................................................................... - 4 -六、搅拌器的选择...................................................................................................................... - 4 -七、设计结果一览表................................................................................................................ - 5 -八、参考文献.................................................................................................... 错误!未定义书签。
连续搅拌反应釜过程的闭环增益成形PID控制器设计

连续搅拌反应釜过程的闭环增益成形PID控制器设计摘要:针对连续搅拌反应釜(CSTR)系统控制问题,设计了一种基于闭环增益成形算法的PID控制器,以提高PID控制器设计的简洁性和鲁棒性。
首先假设期望闭环回路传递函数有一阶形式,同时将受控对象的一阶传递函数和PID控制器构成实际闭环回路传递函数。
然后,比较期望闭环回路传递函数和实际闭环回路传递函数,即可确定PID参数。
最后,以某CSTR系统为例,利用该方法设计了PID控制器,并通过仿真结果比较,检验了该方法所得PID控制器的良好鲁棒稳定性和动态品质。
?ス丶?词:PID控制器; 闭环增益成形; 鲁棒控制; 一阶对象;连续搅拌反应釜?ブ型挤掷嗪牛? TP273文献标志码:A英文标题??PID controller design of closed??loop gain shaping in CSTR process?び⑽淖髡呙?LI Shu??qing1, ZHANG Sheng??xiu1, ZHANG Yu??dong2, HU Bo3?び⑽牡刂?(1. Teaching and Research Section 303, The Second Artillery Engineering College, Xi’an Shaanxi 710025, China??;??2. Teaching and Research Section 501, The Second Artillery Engineering College, Xi’an Shaanxi 710025, China??;??3. The Second Artillery Engineering Designing Academe, Beijing 100011, China英文摘要)??Abstract:To solve the control problem ofContinuous??Stirred??Tank??Reactor (CSTR), a straightforward PID design based on closed??loop gain shaping algorithm was proposed in this paper to enhance the simplicity and robustness of PID controller. Firstly, the transfer function of the anticipant closed??loop control system was assumed as a 1st order system, and the actual closed??loop transfer function was consisted of the 1st order transfer function and PID controller. Then, the anticipated closed??loop transfer function wascompared with that of the actual closed??loop, thus the PID controller coefficients could be calculated. Finally, the robust PID controller was designed in a CSTR system. The simulation results demonstrate that the PID controller has better robust stability and dynamic performance.英文关键词??Key words:PID controller; closed??loop gain shaping; robust control; 1st order plant; Continuous??Stirred??Tank??Reactor (CSTR)0 引言??PID控制是最早发展起来的控制策略之一,也是迄今为止工业过程控制中应用最广泛的控制方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
连续搅拌反应釜的智能控制器设计
其中或=l的概率为l/m,ra=20,其余为O·
2.4仿真研究
本节将分别采用基本遗传算法和改进的遗传算法对Rastrigin函数进行仿真。
Rastrigin函数是最常用来测试遗传算法的一个典型函数,它具有多个局部最小值和一个全局最小值.具有两个独立变量的aastrigin函数定义为:
/(曲=20+x;+《一10(cos2fxi+cos2,rx2)(2.14)其中变量范围为【-5.12,5.12],该函数有许多局部最小值,只有一个全局最小值,出现在x_y平面上的点【O,o】处,此时函数值为0.在任何不同于【O,O】的局部最小点处,函数的值均大予零,局部最小处距原点越远,该点处Rastdgin函数的值越大.其三维图形如下图所示:
图2.2ibastfigin函数的三维图
Fig.2.2ttu'eemimensionalchartofRastrigin
我们使用英国设菲尔德大学开发的遗传算法工具箱函数【捌来进行仿真实验,该工具箱提供了广泛多样的有用函数,均是用M文件写成的命令行形式的函数,。