现代控制理论4章
现代控制理论-4-控制系统的稳定性分析

外部稳定性只适用于线性系统,内部稳定性不但适用于线性系 统,而且也适用于非线性系统。对于同一个线性系统,只有在 满足一定的条件下两种定义才具有等价性。
不管哪一种稳定性,稳定性是系统本身的一种特性,只和系统 本身的结构和参数有关,与输入-输出无关。
V ( x)半负定
同时有
& V
(
x
)
-
2
x22
不可能恒为零。
由判据2可知,系统在原点处的平衡状态是渐近稳定的。
27
4.5 李雅普诺夫方法 在线性系统中的应用
28
一、线性定常连续系统的稳定性分析
目的:将李氏第二法定理来分析线性定常系统 x& Ax 的稳定性
讨论:V选&(x择) 二(x次T P型x)函 x&数T PVx +(xx)TPxx& TP(xAx为)T P李x +氏x函T PA数x。
如果d 与初始时刻 t0无关,则称平衡状态xe为一致渐近稳定。
渐近稳定几何表示法:
10
3、大范围渐近稳定
如果对状态空间的任意点,不管初始偏差有多大,都有渐
近稳定特性,即:lim x t
- xe
0
对所有点都成立,称平衡状态xe为大范围渐近稳定的。其
渐近稳定的最大范围是整个状态空间。
必要性:整个状态空间中,只有一个平衡状态。 (假设有2个平衡状态,则每个都有自己的稳定范 围,其稳定范围不可能是整个状态空间。)
(2) 求系统的特征方程:
det(lI
-
A)
l
- 1
求得: l1 2,l2 -3
现代控制理论习题解答(第四章)

第四章 控制系统的稳定性3-4-1 试确定下列二次型是否正定。
(1)3123212322212624)(x x x x x x x x x x v --+++= (2)232123222126410)(x x x x x x x x v ++---= (3)312321232221422410)(x x x x x x x x x x v --+++= 【解】: (1)04131341111,034111,01,131341111<-=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数不定。
(2)034101103031,0110331,01,4101103031<-=--->=--<-⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=P二次型函数为负定。
(3)017112141211003941110,010,1121412110>=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数正定。
3-4-2 试确定下列二次型为正定时,待定常数的取值范围。
312321231221211242)(x x x x x x x c x b x a x v --+++=【解】:312321231221211242)(x x x x x x x c x b x a x v --+++=x c b a x T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=1112121110212111,011,0111111>---->>c b a b aa 满足正定的条件为:⎪⎩⎪⎨⎧++>+>>1111111114410ca b c b a b a a3-4-3 试用李亚普诺夫第二法判断下列线性系统的稳定性。
;1001)4(;1111)3(;3211)2(;1110)1(x x x x x x x x ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--=【解】: (1)设22215.05.0)(x x x v +=⎩⎨⎧≠≤==-=--=+=)0(0)0(0222221212211)(x x x x x x x x x x x x x v为半负定。
《现代控制理论》第三版课件_第4章
e λ1t z10 λ2t e z 20 z (t ) = λnt e z n0
ˆ C11 ˆ C 21 y (t ) = ˆ C m1 ˆ C12 ˆ C
λt ˆ C1n e 1 z10 ˆ e λ2t z 20 C2n ˆ e λnt z n 0 C mn
J = diag{λ1 , λ2 , , λn }
[ p1
p2
λ1 0 pn ] 0
0 λ2 0
0 0 = A [p 1 λn
p2 pn ]
J1 0 J = P −1 AP = 0
0 J2 0
λ j 0 0 0
零空间(核空间)
n
4-5 状态向量的线性变换
x = Ax + Bu y = Cx + Du
x = Pz
ˆ ˆ = P −1 APz + P −1 Bu = Az + Bu z ˆ y = CPz + Du = Cz + Du
状态向量的线性变换不影响系统的状态能控 性、能观性和传递函数阵,也不影响系统矩 阵的特征值和系统平衡状态的稳定性。
[
p j 2 p jq
]
( λ j I − A) p j1 = 0
Pj = p j1
[
p j2
p jq
]
( λ j I − A) p j 2 = − p j1 ( λ j I − A) p j 3 = − p j 2 ( λ j I − A) p jq = − p j ( q −1)
( λ j I − A) p j1 = 0 ( λ j I − A) p j 2 = − p j1 ( λ j I − A) p j 3 = − p j 2
第4章(1)线性控制系统的能控性和能观性
第4章(1)线性控制系统的能控性和能观性第四章线性控制系统的能控性和能观性在现代控制理论中,能控性(Controllability)和能观性(Observ- ability)是两个重要的概念,它是卡尔曼(Kalman)在1960年提出的,是最优控制和最优估计的设计基础。
能观(测)性针对的是系统状态空间模型中的状态的可观测性,它反映系统的内部状态x(t)(通常是不可以直接测量的)被系统的输出量y(t)(通常是可以直接测量的)所反映的能⼒。
能控性严格上说有两种,⼀种是系统控制输⼊u(t)对系统内部状态x(t)的控制能⼒,另⼀种是控制输⼊u(t)对系统输出y(t)的控制能⼒。
但是⼀般没有特别指明时,指的都是状态的可控性。
所以,系统的能控性和能观性研究⼀般都是基于系统的状态空间表达式的。
4-1 线性连续定常系统的能控性定义对于单输⼊n 阶线性定常连续系统bu Ax x+= 若存在⼀个分段连续的控制函数u(t),能在有限的时间段 []f t t ,0内把系统从0t 时刻的初始状态()0t x 转移到任意指定的终态()f t x ,那么就称系统在0t 时刻的状态()0t x 是能控的;如果系统每⼀个状态()0t x 都能控,那么就称系统是状态完全可控的。
反之,只要有⼀个状态不可控,我们就称系统不可控。
对于线性定常连续系统,为简便计,可以假设00=t ,()0=f t x ,即00=t 时刻的任意初始状态()0x ,在有限时间段转移到零状态()0=f t x (原点)。
4-2线性连续定常系统的能控性判别4-2-1具有约旦标准型系统的能控性判别 1.单输⼊系统具有约旦标准型系统bu x x+Λ==Λn λλλλ0000000000000321n λλλλ≠≠≠≠ 321即为n 个互异根或bu Jx x+==++n m m J λλλλλλ000000000000000100000000121111m 个重根1λn-m 个互异根n m m λλλ≠≠≠++ 21 例:分析下列系统的能控性(1)u b x x+??=221000λλ[]x c c y 21=解:?=111x xλ 1x 与u ⽆关,即不受u 控制 ?+=u b x x2222λ 2x 为能控状态该系统为状态不完全能控,因⽽为不能控系统。
现代控制理论第四章-李雅普诺夫稳定性
0s
0
1
s
0 1 1 1 1
(s
s 1 1)(s 1)
s
1 1
可见传递函数的极点 s 1位于s的左半平面,故系统
输出稳定。这是因为具有正实部的特征值2 1 被系统的零
点 s 1 对消了,所以在系统的输入输出特性中没被表现出
来。由此可见,只有当系统的传递函数W(s)不出现零、极
点对消现象,并且矩阵A的特征值与系统传递函数W(s)的
2020/3/22
6
现代控制理论
第4章 李亚普诺夫稳定性分析
4.2 李亚普诺夫第二法的概述
1892年俄国学者李亚普诺夫发表了《运动稳定性一般 问题》,最早建立了运动稳定性的一般理论,并把分析常 微分方程组稳定性的全部方法归纳为两类。第一类方法先 求出常微分方程组的解,而后分析其解运动的稳定性,称 为间接方法;第二类方法不必求解常微分方程组,而是提 供出解运动稳定性的信息,称为直接方法,它是从能量观 点提供了判别所有系统稳定性的方法。
即Xe f ( X e ,t) ,0 则把 叫X e做系统的平衡状态。
对于线性定常系统 X AX而言,其平衡状态满足
Xe AX e ,0 若A是非奇异矩阵,则只有 X e ,0 即对线性系 统而言平衡状态只有一个,在坐标原点;反之,则有无限
多个平衡状态。
对于非线性系统而言,平衡状态不只一个。
2020/3/22
9
现代控制理论
第4章 李亚普诺夫稳定性分析
3、李亚普诺夫第二法
李亚普诺夫第二法建立在这样一个直观的物理事实上:
如果一个系统的某个平衡状态是渐近稳定的,即
im
t
X
X,e 那么随着系统的运动,其储存的能量将随时间
现代控制理论(12-17讲:第4章知识点)

0 1 1 0 0 1 1 1 0 1 0 1 0 0 x y x 0 1 1 1 1 0 0 1 1 0 0 0 1 1 0 0
MIMO系统,n=5,r=5,独立特征向量为2, C阵对应列 (1、4列),线性无关, 故系统状态完全能观。
4-4 线性定常离散系统的能控性和能观性
故系统是不能观测的。
y 3 2 0 x
18
例2:判定如下系统的能观性。
1 0 3 x x 7 u 0 3
0 0 1 y x 0 u 1 1
故系统是能观测的。
特别要注意特征值互异的条件,否则会影 响判定结论的正确性。
解: n=3、 r=1 有
0 2 8 Q c B AB A 2 B 0 0 0 1 3 11
显然:
rankQc 2( n)
4
故系统是不能控的。
3、能控性判据之二 (1)、系统特征值互异的情况:
若线性定常系统: Ax + Bu , 具有n个互不相同的 x 特征值,则其状态完全能控的充分必要条件是,系统经非 奇异变换后的状态方程式:
C 1 1 rankQo rank 1 n CA 5 5
故系统是不能观测的.(detQo=0)
16
例2:判定如下系统的能观性。
2 1 1 x x 1 u 1 3
1 0 y x 1 0
b1 0
故系统状态不可控。
特别要注意特征值互异的条件,否则会影 响判定结论的正确性。
(2)、系统具有重特征值的情况: 若线性定常系统: Ax + Bu , 具有重特征值,且 x 每一个重特征值只对应一个独立特征向量,则其状态完全能 控的充分必要条件是,系统经非奇异变换后的Jordan规范形:
《现代控制理论基础》讲义教案第4章.docx
III、综合部分第四早线性多变量系统的综合与设计4.1引言前面我们介绍的内容都属于系统的描述与分析。
系统的描述主要解决系统的建模、各种数学模型(时域、频域、内部、外部描述)Z间的相互转换等;系统的分析,则主要研究系统的定量变化规律(如状态方程的解,即系统的运动分析等)和定性行为(如能控性、能观测性、稳定性等)。
而综合与设计问题则与此相反,即在己知系统结构和参数(被控系统数学模型)的基础上,寻求控制规律,以使系统具有某种期望的性能。
一般说来,这种控制规律常取反馈形式,因为无论是在抗干扰性或鲁棒性能方面,反馈闭环系统的性能都远优于非反馈或开环系统。
在本章中,我们将以状态空间描述和状态空间方法为基础,仍然在吋域中讨论线性反馈控制规律的综合与设计方法。
4. 1. 1问题的提法给定系统的状态空间描述若再给定系统的某个期望的性能指标,它既可以是时域或频域的某种特征量(如超调量、过渡过程时间、极、零点),也可以是使某个性能函数取极小或极大。
此时,综合问题就是寻求一个控制作用u,使得在该控制作用下系统满足所给定的期望性能指标。
对于线性状态反馈控制律u = -Kx + r对于线性输岀反馈控制律u = -Ffy + r其中r e R'为参考输入向量。
由此构成的闭环反馈系统分别为x - {A- BK)x+ Br y-Cx或x = {A-BHC)x+Br y = Cx闭坏反馈系统的系统矩阵分别为九=A — BKA H=A-BHC即工K = (A—BK,B,C)或工〃=(A—BHC,B,C)°闭环传递函数矩阵G K⑶=C '[si-(A-BK)Y] BG H G) = C_,[si-(A-BHOf B我们在这里将着重指出,作为综合问题,将必须考虑三个方面的因素,即1)抗外部干扰问题;2)抗内部结构与参数的摄动问题,即鲁棒性(Robustness)问题;3)控制规律的工程实现问题。
一般说来,综合和设计是两个有区别的概念。
《现代控制理论》第三版 第四章.习题答案

a11 a22 0
4-3(1)选 v( x ) x1 x2 ,平衡点 xe 0 v( x ) 0 ( x ) 2 x12 6 x2 2 6 x1 x2 x T Px v
2 3 P 3 6 2 3 0
1 P 11 0
4-2 法一: 系统的特征方程为:
I A 2 a11 a22 a11a22 a12 a21
系统大范围渐近稳定等价于方程有两个 负实部的共轭复特征值或两个负实特征 值,于是可以得到 1 2 a11 a22 0 12 a11a22 a12 a21 0 法二: P11 P12 设对称阵 P = ,设 Q I P12 P22
2
2
因为 i 为奇数 i 0 i 为偶数 i 0 ,所以
P 负定。
( x ) 0 渐近稳定 v 当 x 近稳定 或按
AT P PA Q
v( x ) 所以大范围渐
取Q I
7 4 P 5 8
稳定
5 8 3 8
1 0 2 0 所以 P 渐近
(2) v( x ) x1 x2
2
2
( x ) 2( x12 x2 2 ) 0 v
当
x v( x ) 所以大范围渐近稳定 1 2 P 0 0 1 2
2 2
或按 AT P PA Q
问题: 4-2 讨论对取 v( x ) x1 x2 ,
1 1 0
3 17.75 0 ,所以 Q( x )
是负定的
2) Q( x ) x T Px
1 1 1 P 1 4 3 1 3 1 1 1 0 2 3 0 所以 Q( x ) 不定符号
现代控制理论-07(第4章Lyapunov稳定性理论)

−1 ⎤ 1 + ( s + 1) ( s + 2) ⎥ ⎥ −1 2 ⎥ + ( s + 1) ( s + 2) ⎥ ⎦
q ⎤ ⎡ 2e −t − e−2t ⎡ ⎢Ψ ⎥ = ⎢ ⎣ ⎦ ⎢ −2e−t + 2e−2t ⎣
e−t − e−2t ⎤ ⎡ q0 ⎤ ⎥⋅⎢ ⎥ −e−t + 2e−2t ⎥ ⎣Ψ 0 ⎦ ⎦
dΨ = −VC = −Cq. dt
dq Ψ = iL = , dt L
电路无外界的能量输入, 同时电路中没有耗能元件, 所以电路总能量W恒定不变.
W = WL + WC = ∫ 0
Ψ
Cq 2 iL (τ1 )dτ1 + ∫ VC (τ 2 )dτ 2 = + ≡ W0 . 0 2L 2
q
Ψ2
从上述式子的最后一个等号看出系统的轨迹是 一个椭圆, 见图4.2.
Ψ2
= 0.
16
Ψ
q
图4.3 例4.2.2状态方程相图
图4.3表明, 从原点很小的领域出发的轨迹能保持在 原点附近, 并能逐渐趋向于原点, 或者说是渐近稳 定的. 17
例4.2.3 图4.1所示的电路中, 设电感是线性的, 电 vC = q3 − q , 阻 R = 0 , 而电容具有非线性的库伏特性 则状态方程是 dq Ψ
dq Ψ = iL = , dt L
此电路中电阻是耗能元件, 所以电路总能量是不断 减少的.为简单起见, 设C=2, R=3, L=1, 再令初始状 态为 (Ψ 0 , q0 ) . dq =Ψ ,
dt
dΨ = −2q − 3 . Ψ dt
14
利用拉普拉斯反变换求解上述方程, 先求预解矩阵
现代控制理论第四章习题答案
第4章“线性系统的能控性与能观性”习题与解答4.1 判断下列系统的能控性。
1) u x x x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡10 01112121 2) ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321111001342100010u u x x x x xx3) ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321020011 10030013u u x x x x xx解:1) 由于该系统控制矩阵⎥⎦⎤⎢⎣⎡=01b ,系统矩阵⎥⎦⎤⎢⎣⎡=0111A ,所以 ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=1101 0111Ab 从而系统的能控性矩阵为[]⎥⎦⎤⎢⎣⎡==1011Ab bU C 显然有[]n Ab bU C ===2rank rank满足能控性的充要条件,所以该系统能控。
2)由于该系统控制矩阵为100111B ⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=342100010A 则有,0101001001 01112431117AB ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-----⎣⎦⎣⎦⎣⎦ 20100111001 111724317115A B -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦⎣⎦从而系统的能控性矩阵为21001110111171117115C U BABA B -⎡⎤⎢⎥⎡⎤==--⎣⎦⎢⎥⎢⎥--⎣⎦有n U C ==3rank满足能控性的充要条件,所以该系统能控。
3)由于该系统控制矩阵为110020B -⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=10030013A 则有,3101133030 00000012020AB ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦ 23103399030 0000012020A B ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦于是,系统的能控性矩阵为21133990000002220C U BABA B ---⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦可知n U C <=2rank不满足能控性的充要条件,所以该系统不完全能控。
现代控制理论 第四章 李雅普诺夫稳定性理论
p11 p11 0, p21
p12 p22
0, ,
p 0
30
2.如果P是奇异矩阵,且它的所有主子行列式均非负,则
V ( x) x Px
T
是正半定的。
3.如果矩阵P的奇数阶主子行列式为负值, T 偶数阶主子行列式为正值,则 V ( x) x Px 是负定的。 即:
p11 p12 p1n p11 p12 n (1) p11 0, (1) 0, , (1) p21 p22
16
4.3 李雅普诺夫第一法(间接法) 利用状态方程解的特性来判断系统稳定性。 1. 线性定常系统稳定性的特征值判据
Ax x(0) x0 t 0 x
1)李雅普诺夫意义下的稳定的充要条件:
Re(i ) 0
Re( i ) 0
i 1,2, n i 1,2, n
17
19
上式为向量函数的雅可比矩阵。
f f1
令
f2 fn
T
x x1 x2 xn
T
x x f ( xe )
x x xe
f A T x
x xe
则线性化系统方程为: x
Ax
20
结论: 1) 若 Re(i ) 0 i 1,2,, n ,则非线性系 统在xe 处是渐近稳定的,与 g ( x) 无关。 2) 若 Re(i ) 0 , Re( j ) 0 , i j 1,, n 则非线性系统不稳定。 3) 若Re(i ) 0,稳定性与g ( x) 有关,
9
4.2 李雅普诺夫稳定性的定义
1.李雅普诺夫意义下的稳定
如果对每个实数 0 都对应存在另一 个实数 ( , t0 ) 0 满足
现代控制理论 4-1 状态空间表达式的线性变换

2
⎥ ⎦
P −1
=
⎡2 ⎢⎣1
1⎤ 1⎥⎦
cΛ = P−1AP
=
⎡−1 ⎢
⎣
⎤ − 2⎥⎦
b = P−1b
=
⎡2 ⎢⎣1
1⎤ ⎡0⎤ 1⎥⎦ ⎢⎣1⎥⎦
=
⎡1⎤ ⎢⎣1⎥⎦
tcy c = cP
= [1
1]⎢⎣⎡−11
−1⎤ 2 ⎥⎦
=
[0
1]
d = d = 0 返回
前页
4
⎡ ⎢ ⎣
x&1 (t )⎤ x&2 (t)⎥⎦
O O
⎤
⎥
⎥
1⎥
λ1
⎥ ⎦
⇒ ⎪⎪⎪⎨L(λ1I − A)p2 = −p1 ⎪⎩(λ1I − A)pm = −pm−1
pm+1,L, pn 为互异实特征值对应的特征向量,满足:
tc Api = λipi (i = m +1,L,n)
返回
(2) A为友矩阵,有m重实特征值 λ1 ,对应1个独立的 实特征向量 p1;另外有n-m个互异实特征值 λm+1,L, λn
时只有1个独立的实特征向量 p1
返回
10
非奇异线性变换矩阵
[ ] P = p1 p2 L pm | pm+1 L pn J = P−1AP
e p2,L,pm 为广义实特征向量,满足:
a A[p1 p2 L pm]=
⎧(λ1I − A)p1 = 0
c y [p1
p2
L
⎡λ1 ⎢
p
m
]⎢
⎢
⎢
⎣
1 λ1
=
⎡2 ⎢⎣1
1⎤ ⎡− 1⎤ 1⎥⎦⎢⎣ 1 ⎥⎦
现代控制理论-第四章-线性系统的能控性与能观性 PPT课件

第四章 线性系统的能控性与能观性
4.1 定常离散系统的能控性
4.2 定常连续系统的能控性
4.3 定常系统的能观性
4.4 线性时变系统的能控性及能观性
4.5 能控性及能观性的对偶关系
4.6 线性定常系统的结构分解
4.7 能控性、能观性与传递函数矩阵的关系
4.8 能控标准形和能观标准形
1。能控性判据的第一种形式
定理4.2.1 系统(4.2.1)状态完全能控的充分必要 条件是能控性矩阵
UC B AB
的秩为n,即
rank B AB
An1B
An1B n
2019年10月17日
hh
17
第四章 线性系统的能控性与能观性
注:如果系统是单输入系统,则系统的状态完全能 控性的判据为
2019年10月17日
hh
25
第四章 线性系统的能控性与能观性
例4.2.2 判断线性定常系统
x1 1
x2
0
x3 0
3 2 1
2 x1 2
0
x2
1
3 x3 1
1
1
1
u1 u2
1 2 1 1 2 2 4 A2B 0 1 0 0 1 0 1
1 0 3 1 0 4 2
从而
1 0 1 2 2 4 UC 0 1 0 1 0 1
0 0 1 0 4 2
rankUC 3 n 所以,系统能控
hh
5
第四章 线性系统的能控性与能观性
桥形电路(a)两个电容相等。选各自的电压 为状态变量,且设电容上的初始电压为零,根据 电路理论,则两个状态分量恒相等。相平面图 (b)中相轨迹为一条直线,因此系统状态只能在 相平面的一条直线上移动,不论电源电压如何变 动,都不能使系统的状态变量离开这条直线,显 然,它是不完全能控的。
现代控制理论第3版刘豹唐万生课后全部答案机械工业出版社
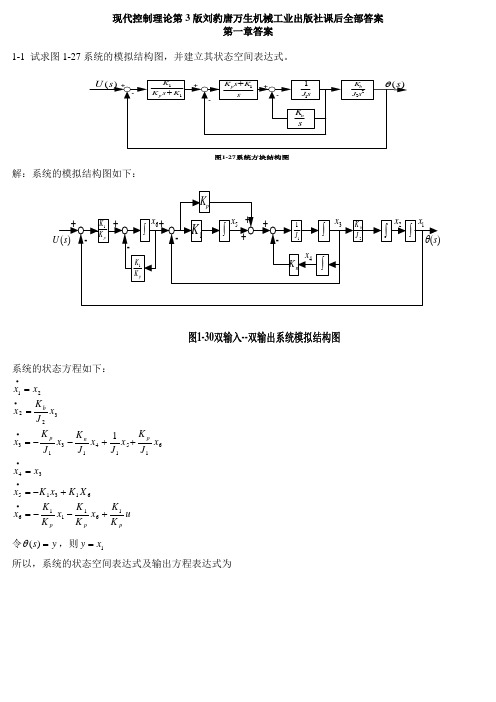
现代控制理论第3版刘豹唐万生机械工业出版社课后全部答案第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:uKK x KK x KK x X K x K x x x x J Kx J x J K x J Kx x J K x x x ppppn pb 1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙65432116543211111111265432100000100000000000000010010000000000010x x x x x x y uK K x x x xx x K K K K K K J K J J K J KJ K x x x x x xp p pp n pb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x Cx Cx x L x L R x uL x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000010111010x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论(第3版)》刘豹 唐万生课件 第4章

的。李雅普诺夫根据系统自由响应是否有界把系统的稳定性定义为四种情况。
1.李雅普诺夫意义下稳定 2.渐近稳定 3.大范围渐近稳定 4.不稳定
4.2 李雅普诺夫第一法
4.2.1 线性系统的稳定判据 线性定常系统
(1) 平衡状态 实部。 以上讨论的都是指系统的状态稳定性,或称内部稳定性。但从工程意义 渐近稳定的充要条件是矩阵A的所有特征值均具有负
是从
开始观察的时间变量。 式(2)实际上描述了系统式(1)在n 维状态空间中从初始条件 发的一条状态运动的轨迹,简称系统的运动或状态轨线。 若系统式(1)存在状态矢量 ,对所有 ,都使: (3) 成立,则称 为系统的平衡状态。 出
对于一个任意系统,不一定都存在平衡状态,有时即使存在也未必是唯
一的,例如对线性定常系统:
1.标量函数的符号性质 设 为由 维矢量 所定义的标量函数, ,如果: ,且在 处恒
有
所有在域
。
中的任何非零矢量
2.二次型标量函数 二次型函数在李雅普诺夫第二方法分析系统的稳定性中起着很重要的作 用。 设 为n个变量,定义二次型标量函数为:
(8)
矩阵 P 的符号性质定义如下: 设P 为 实对称方阵, 为由P 所决定的二次型函数。
称稳定判据。 ②若 来说,除去 为负定;或者虽然 外,对 为半负定.但对任意初始状态 不恒为零。那么原点平衡状态是渐近稳 ,则系统是大范围渐近稳定
定的。如果进一步还 的。此称渐近稳定判据。
③若 4.3.3
1)
为正定,那么平衡状态 对李雅普诺夫函数的讨论
是不稳定的。此称不稳定判据。
是满足稳定性判据条件的一个正定的标量函数,且对x应具
由稳定性判据可知,当
为正定对称矩阵时,若
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(5) 渐近稳定就是大范围渐近稳定,两者完全等价。
4.3线性定常系统的Lyapunov稳定性分析
x(t ) f ( x(t ), t ) f (0, t ) 0 t t0
定理5.3 考虑如下非线性系统
如果存在一个具有连续一阶偏导数的 纯量函数V(x,t),在平衡点xe的邻域内, 且满足以下条件: 1、 V(x,t)正定; 2、 dV(x,t)/dt正定; 则在系统平衡点xe的平衡状态是不稳定 的。
性定常的,当A为非奇异矩阵时,系统存在一个唯一的平衡状态; 当A为奇异矩阵时,系统将存在无穷多个平衡状态。对于非线性系 统,可有一个或多个平衡状态。任意一个 的平衡状态 都可通过坐 标变换,统一化为扰动方程之坐标原点 。除非特别申明,我们将 仅讨论扰动方程关于原点处之平衡状态的稳定性问题。
4.1 Lyapunov意义下的稳定性问题
数V(x,t),且满足以下条件: 1、 V(x,t)正定; 2、 dV(x,t)/dt负定
如果存在一个具有连续一阶偏导数的纯量函
则在原点处的平衡状态是(一致)渐近稳定的。
进一步地,若 x ,V ( x, t ) ,则在原点处的平 衡状态是大范围一致渐近稳定的。
4.2 Lyapunov稳定性理论
几个特点:
(1) 都是充要条件,而非仅充分条件; (2) 渐近稳定性等价于Lyapunov方程的存在性; (3) 渐近稳定时,必存在二次型Lyapunov函数; V ( x) x T Px及V ( x) x TQx P,Q为正定的
(4) 当系统矩阵A非奇异时,仅有唯一
平衡点,即原点;
二、Lyapunov第二法 (间接法)
[例5.3] 考虑如下非线性系统
显然原点是唯一的平衡状态。试确定其稳定性。如果定义一个正定纯量函 数 v(x),而 dv(x)/dt是负定的,这说明沿任一轨迹连续地减小,因此是一 个Lyapunov函数。由于随x偏离平衡状态趋于无穷而变为无穷,则按照 定理5.1,该系统在原点处的平衡状态是大范围渐近稳定的。
2 2( x12 x2 ) 2
4.2 Lyapunov稳定性理论
二、Lyapunov第二法 (间接法)
几点说明:
(1) 这里仅给出了充分条件,也就是说,如果能构造出了Lyapunov函数,那 么系统是渐近稳定的。但如果找不到这样的Lyapunov函数,并不能给出任 何结论,例如不能据此说该系统是不稳定的。 (2) 对于渐近稳定的平衡状态,则Lyapunov函数必存在。 (3) 对于非线性系统,通过构造某个具体的Lyapunov函数,可以证明系统在 某个稳定域内是渐近稳定的,但这并不意味着稳定域外的运动是不稳定的。 对于线性系统,如果存在渐近稳定的平衡状态,则它必定是大范围渐近稳定 的。 (4) 这里给出的稳定性定理,既适合于线性系统、非线性系统,也适合于定常 系统、时变系统,具有极其一般的普遍意义。
第四章控制系统的李雅普诺夫稳定性分析 4.1 Lyapunov意义下的稳定性问题
一、平衡状态、给定运动方程之原点 考虑如下非线性系统 :
x f ( x, t )
式中x为n维状态向量。在系统中,总存在: f ( xe , t ) 0
对所有t成立,则xe称为系统的平衡状态或平衡点。如果系统是线
4.2 Lyapunov稳定性理论 二、Lyapunov第二法 (间接法) 定理5.2 考虑如下非线性系统 如果存在一个具有连续一阶偏导数的纯量函 数V(x,t),且满足以下条件: 1、 V(x,t)正定;
x(t ) f ( x(t ), t ) f (0, t ) 0 t t0
2、 dV(x,t)/dt负半定;
的充要条件是矩阵P的所有主子行列式均为正值,即
p11 p11 0, p11 p12 p12 0, , p22 p21 p1n
p12 p22 p2 n
p1n p2 n pnn 0
4.1 Lyapunov意义下的稳定性问题
[例5.2] 试证明下列二次型是正定的。
2 2 V ( x) 10 x12 4 x2 x3 2 x1 x2 2 x2 x3 4 x1 x3
4.2 Lyapunov稳定性理论
二、Lyapunov第二法 (间接法)
由力学经典理论可知,对于一个振动系统, x f ( x, t ) 当系统总能量(正定函数)连续减小(这意 =Ax B( x, t )
味着总能量对时间的导数必然是负定的), 直到平衡状态时为止,则振则系统是稳定的。 Lyapunov引出了一个虚构的能量函数,
4.2 Lyapunov稳定性理论
一、Lyapunov第一法 (直接法)
将系统方程在平衡点线性化得到系数矩阵A,计算
矩阵的特征值,若特征值实部全都小于零,系统稳定 且为渐近稳定,否则不稳定。若有等于零,需要进一 步判断B(x,t)。此方法需要取得系数矩阵A的特征 值,使用不多。
x f ( x, t ) =Ax B( x, t )
p11 p 21 xn ] p1n
p12 p1n x1 x p22 p2 n 2 p2 n pnn xn
4.1 Lyapunov意义下的稳定性问题
三、预备知识
5、二次型 二次型正定性可用赛尔维斯特准则判断。该准则指出,二次型为正定
如果在域内,不论域多么小,既可为正值,也可为负值时,纯量函数称为 不定的纯量函数。
4.1 Lyapunov意义下的稳定性问题
三、预备知识
[例] 本例给出按照以上分类的几种 纯量函数。假设x为二维向量。
1、正定的
2、正半定的 3、负定的
2 1、V ( x) x12 2 x2
2、V ( x) ( x1 x2 )2 3、V ( x) x12 (3x1 2 x2 ) 2
x0 xe x0 xe [( x1 x1e ) 2 ( x2 x2 e ) 2 ( xn xne ) 2 ]1/ 2
X0为初始状态,有如下成立:
4.1 Lyapunov意义下的稳定性问题
X0为初始状态,有如下成立: (1) 如果对应于每一个,存在一个,使得当t趋于无穷时,始于的轨迹不脱离
,则式系统之平衡状态称为在Lyapunov意义下是稳定的。一般地,实数 与有关,通常也与t0有关。如果 与t0无关,则此时平衡状态称为一致稳定
的平衡状态。 (2) 如果平衡状态,在Lyapunov意义下是稳定的,并且始于域的任一条轨迹, 当时间t 趋于无穷时,都不脱离,且收敛于平衡点,则称系统之平衡状态为 渐近稳定的。 (3) 对所有的状态,如果由这些状态出发的轨迹都保持渐近稳定性,则平衡状态 称为大范围渐近稳定。显然,大范围渐近稳定的必要条件是在整个状态空间
2、纯量函数的负定性
如果 - V(x)是正定函数,则纯量函数V(x)称为负定函数。
3、纯量函数的正半定形 如果纯量函数V(x)除了原点以及某些状态等于零外,在域内的所有状态都 是正定的,则称为正半定纯量函数。 4、纯量函数的负半定性 如果 - V(x)是正半定函数,则纯量函数称为负半定函数。 5、纯量函数的不定性
4.2 Lyapunov稳定性理论 二、Lyapunov第二法 (间接法)
x1 x2 x2 x1 x2
2 V ( x) x12 x2
[例5.5] 考虑如下非线性系统
显然原点是唯一的平衡状态。试确定 其稳定性。如果定义一个正定纯量函 数 v(x), dv(x)/dt是正半定的。 若dv(x)/dt≡0,则x2≡0, dx2/dt≡0,最终x1≡0,可见仅有 原点符合要求,其他点不可能成立, 所以系统是不稳定的。
二、Lyapunov意义下的稳定性定义 系统 : x f ( x, t ),f ( xe , t ) 0 之平衡状态xe的邻域为: x xe
x xe [( x1 x1e ) 2 ( x2 x2e ) 2 ( xn xne ) 2 ]1/ 2 存在邻域:
பைடு நூலகம்
x1 x2 x2 x1 x2
2 V ( x) x12 x2
dV ( x) 2 x1 x1 2 x2 x2 dt =2 x1 x2) 2 x2 x1 x2) ( (
2 2 x2
能成立,所以系统是大范围渐近 稳定的。
4.2 Lyapunov稳定性理论 二、Lyapunov第二法 (间接法)
2 x1 x2 x1 ( x12 x2 ) 2 x2 x1 x2 ( x12 x2 ) 2 V ( x) x12 x2
dV ( x) 2 x1 x1 2 x2 x2 dt 2 2 =2 x1 x2 x1 ( x12 x2 )) 2 x2 x1 x2 ( x12 x2 )) ( (
10 1 2 V ( x) xT Px [ x1 x2 x3 ] 1 4 1 2 1 1 10 1 2 10 1 10 0, 0, 1 4 1 0 1 4 2 1 1
x1 x 2 x3
因为矩阵P的所有主子行列式均为正值,所以是V(x)正定的。
3、对于任意t0和任意x0,在t>t0 时, dV[q(x0,t),t]/dt不恒等于零,其中q(x0,t), 表示在t0时从x0出发的轨迹。则在系统原点 处的平衡状态是大范围渐近稳定的。
4.2 Lyapunov稳定性理论
二、Lyapunov第二法 (间接法)
[例5.4] 考虑如下非线性系统
显然原点是唯一的平衡状态。试 确定其稳定性。如果定义一个正 定纯量函数 v(x), dv(x)/dt是负 半定的。 若dv(x)/dt≡0,则x2≡0, dx2/dt≡0,最终x1≡0,可见 仅有原点符合要求,其他点不可