基于序列图像的全景图像拼接
Photoshop拼接技巧 制作360度全景照片

Photoshop拼接技巧:制作360度全景照片随着数字摄影技术的发展,全景照片越来越受到大众的关注。
而在制作360度全景照片时,Photoshop可以是一个非常强大的工具。
本文将介绍如何使用Photoshop拼接多张照片,制作出令人惊叹的360度全景照片。
步骤一:拍摄照片为了制作一张完整的360度全景照片,你需要在同一个位置以不同角度拍摄多张照片。
可以选择固定摄像机的位置,然后以每30度或45度为间隔进行拍摄。
为了确保拼接时的平滑过渡,最好使用三脚架来稳定摄像机。
步骤二:导入照片到Photoshop打开Photoshop软件,并选择“文件”>“脚本”>“加载文件到堆栈”。
在打开的对话框中,点击“浏览”,然后选择你要拼接的照片。
将所有照片都选择后,点击“确定”。
步骤三:将照片对齐在导入照片后,Photoshop会将它们放在不同的图层上。
点击“编辑”>“自动对齐图层”。
在弹出的对话框中,选择“自动”作为对齐图层的方法,然后点击“确定”。
Photoshop会自动为你对齐图层,以确保照片的对应部分重叠。
步骤四:裁剪图像由于拍摄过程中,可能会有部分图像超出画面范围。
为了使全景图像更加完整,需要进行裁剪。
选择“裁剪工具”(快捷键:C),然后在图像上拖动,选择你想要保留的部分。
点击“确定”,完成裁剪。
步骤五:拼接照片选择“图层”>“自动”>“混合图层”。
在弹出的对话框中,选择“圆柱投射”,然后点击“确定”。
Photoshop会将不同的图层拼接在一起,创建出一个360度的全景图像。
步骤六:修复缺陷在拼接的过程中,可能会出现一些不连贯的部分或拼接痕迹。
为了消除这些缺陷,可以使用修复工具或克隆工具进行修复。
选择“修复工具”(快捷键:J)或“克隆工具”(快捷键:S),然后在图像上进行修复,使过渡更加自然。
步骤七:调整颜色和对比度最后,根据需要可以对全景图像进行一些色彩和对比度的调整。
选择“图像”>“调整”>“亮度/对比度”或其他调整选项,然后进行相应的调整。
基于深度学习的全景图像拼接技术研究

基于深度学习的全景图像拼接技术研究随着科技的飞速发展,相机成为了我们日常生活中最为普遍的物品之一,拍摄照片也已经成为了人们生活中不可或缺的一部分。
而全景图像拼接技术就是在这样一个背景下逐渐走入人们的视野。
它利用图像处理技术,将多张不同角度或位置的图片拼接到一起,生成一个完整的全景图像。
本文将探讨基于深度学习的全景图像拼接技术,从理论到实践,从优点到缺点剖析这一技术。
一、基本原理全景图像拼接技术是将多张图片进行拼接,形成一个整体,使其具有一定的连续性和逼真度。
全景图像拼接技术的基本原理是利用摄像机捕捉连续的局部图像,然后将这些图像进行拼接。
在全景拼接中,最常用的方法是通过计算机程序将多幅图像进行配准,然后通过图像拼接技术将这些图像无缝拼接实现全景效果。
二、基于深度学习的全景图像拼接技术研究现状近年来,随着深度学习技术的不断发展,其在图像处理方面也得到了广泛的应用。
基于深度学习的全景图像拼接技术,尤其是卷积神经网络和生成对抗网络等技术的应用,大大提高了全景图像拼接的效果和速度。
在基于深度学习的全景图像拼接技术研究方面,不管是视角的拼接还是场景的拼接,都有很多成果。
例如,有一种名为DeepImageMeld的方法,它利用全景模板和深度图像将多张图片进行配准和拼接,从而产生了一些令人惊叹的结果。
同样,Swirski等人所提出的方法也可以将多张图片配准在一起,并在拼接过程中考虑到了姿态和光照的变化,从而实现更好的拼接效果和更完整的场景。
除了这些方法之外,还有一些其他的方法,如图像融合和全景运动重建等方法,都可以在一定程度上提高全景图像拼接效果。
三、基于深度学习的全景图像拼接技术的优点基于深度学习的全景图像拼接技术有很多优点。
首先,这种技术可以大幅提高全景图像拼接的效果和速度。
其次,这种技术能够自动进行图像配准、调整和拼接,减少了大量人工干预。
此外,基于深度学习的全景图像拼接技术在应对图像下采样和噪声等问题时也有所优势。
基于SIFT的全景图像拼接方法研究
基于SIFT的全景图像拼接方法研究全景图像拼接主要解决由于普通成像设备视角限制,难以拍摄到高分辨率大视场图像的问题。
本文以具有平移、旋转、尺度变换、视角变换及复杂变化的图像作为研究对象,借助经典SIFT算法的良好鲁棒性,设计了针对序列图像的SIFT 配准方法,并进行了实验验证。
实验结果表明:改进后的算法不仅能缩短拼接时间,还具有较高的正确匹配率。
标签:全景图像拼接改进意义一、基于SIFT的全景图像拼接的研究意义全景图像拼接是指把一系列拥有重叠区域的局部图像通过图像配准、图像变换和图像融合拼合成一大幅高清晰并且无明显接缝的全局图像。
其能够很好地解决成像场景的视角范围与分辨率间难以共存的问题,被广泛地应用在碎片图像合成、虚拟现实等领域[1]。
然而,用于拼接的图像间仅有一部分重叠区域,特征匹配对也只会在这个重叠区域内建立,与重叠区域外特征点匹配只会增加建立错误匹配对的可能并增加匹配时间。
针对现有的因提取整幅图像特征而导致算法计算量大、非重叠区域特征容易造成后续匹配错误和计算冗余等问题,设计了本文的算法,以求在降低匹配计算量的同时有效降低误匹配率。
二、基于SIFT的全景图像拼接算法改进由于SIFT特征性能卓越,在图像发生平移、旋转、缩放、亮度变化时能保持良好不变性,且对视角变化、仿射变换、噪声也保持一定程度的稳定性,所以通用性很强。
但SIFT特征应用于图像拼接时存在大量冗余,导致运算量大,并且在非重叠区域的特征点容易出现匹配错误[2]。
而用于提纯匹配点的RANSAC 算法是以每次随机抽取初步匹配点样本来计算模型参数,以至于会导致迭代次数偏多,带来运算量偏大大的问题。
基于以上考虑,本文设计的改进算法的执行步骤如下:1.首先将两幅拥有重叠区域的序列图像I1和I2分别提取SIFT特征点;2.在图像中I1,选取与图像I2相邻的边缘区域(文中设定边缘区域宽为200像素)内的SIFT特征点,跟图像I2中的特征点建立匹配对,然后记录在图像I2中对应点,进行直线拟合得到直线I1,这样直线I1将图像I2分成了两块区域,与图像边缘围成的区域就是初始重叠区域H1;3.用同样的方法反向匹配,在图像I1中获得对应直线I2和初始的重叠区域H2;4.最后仅在建立的初始重叠区域H1和H2中寻找匹配对,建立两幅图像的对应关系(参数变换模型)。
应用photo merge制作完美全景照片

应用photo merge制作完美全景照片要制作一张完美的全景照片,PhotoShop的photo merge功能是一个非常有用的工具。
它可以将多张照片自动拼接在一起,创造出无缝连接的全景效果。
下面是一些使用技巧,让你能够轻松地应用photo merge功能来制作完美的全景照片。
第一步是选择多张适合作为全景照片的图片。
这些图片应该有一定的重叠部分,以供软件进行准确的拼接。
确保你的相机在拍摄时保持稳定,使用三脚架是一个好主意,以减少图片之间的晃动。
打开PhotoShop软件,点击“文件”菜单,选择“自动”下的“photo merge”。
一个新的窗口将打开,显示photo merge的设置选项。
在photo merge窗口中,你将看到一个“源文件”选项,用于添加你想要拼接的照片。
点击“浏览”,选择相应的照片文件,然后点击“打开”。
在“布局”选项中,选择“自动”以让软件自动选择拼接方式。
如果你想要更多的控制,你可以选择“视角”或“球形”来手动调整拼接方式。
在“颜色校正”选项中,你可以选择自动或手动对照片进行颜色校正。
如果你对照片的颜色有特殊要求,你可以手动调整曝光度、对比度和颜色平衡等参数。
完成以上设定后,点击“确定”按钮,软件将开始自动拼接照片。
这个过程可能需要一些时间,具体处理时间取决于照片的数量和大小。
当拼接完成后,你将看到生成的全景照片在新的文档中显示出来。
此时,你可以使用PhotoShop的各种工具来进一步编辑和调整照片。
比如,你可以使用修剪工具来剪裁全景照片的边缘部分,以消除不必要的空白区域。
你还可以使用克隆工具,来修复可能由于拼接不完美而产生的瑕疵。
除了基本的编辑工具之外,PhotoShop还提供了各种滤镜和特效,让你能够为全景照片添加更多的艺术效果。
比如,你可以尝试添加渐变滤镜来增加照片的色彩层次,或者使用模糊滤镜来营造出梦幻的效果。
完成了所有的编辑和调整后,你可以点击“文件”菜单,选择“保存”来保存你的全景照片。
手把手教你使用Adobe Photoshop软件制作拼接全景照片

手把手教你使用Adobe Photoshop软件制作拼接全景照片在现代社会中,随着智能手机和相机的发展,拍摄全景照片越来越普遍。
然而,你可能会遇到一个问题:当你希望捕捉一个超出相机视野范围的广阔景象时,照片的局限性就暴露了出来。
这时候,拼接全景照片就变得尤为重要了。
本文将教你如何使用Adobe Photoshop软件来完成这项任务。
首先,确保你已经安装了Adobe Photoshop软件,并打开你所拍摄的全景照片。
接下来,我们将采取以下步骤:1. 调整照片在开始拼接之前,你需要先调整照片的色彩和曝光,以确保每张照片的质量一致。
你可以使用Photoshop的“曝光”和“色彩平衡”工具来进行调整。
调整完成后,你可以在“图层”面板中将每张照片叠加在一起。
2. 对齐图像在拼接全景照片时,你需要确保每张照片的角度和位置是一致的。
为了实现这一点,你可以使用Photoshop的“自动对齐图像”功能。
该功能会自动识别并纠正照片之间的旋转、位移和变形。
只需选择你想对齐的照片,并在菜单中选择“编辑”->“自动对齐图像”。
3. 裁剪照片在完成照片的对齐后,你可能会发现照片边缘存在重复或多余的部分。
为了去除这些不必要的内容,你可以使用Photoshop的裁剪工具。
只需选择“图像”->“裁剪”,然后通过拖动和调整裁剪框来获得你想要的最终效果。
4. 进行全景拼接一旦你对照片进行了调整和对齐,并且完成了裁剪,你就可以开始进行全景拼接了。
在Photoshop中,你可以使用“平铺画布”工具来将每张照片连接起来。
只需选择你的照片,并在菜单中选择“编辑”->“平铺画布”,然后按照提示进行设置。
5. 进一步调整完成全景拼接后,你可能会发现一些细微的不连贯或不一致之处。
为了进一步调整和改善你的全景照片,你可以运用Photoshop中的其他工具和功能。
例如,你可以使用“修复画笔”工具来修复图像的缺陷,或者使用“变换”工具来调整图像的大小和形状。
Photoshop如何拼接多张照片制作全景图

Photoshop如何拼接多张照片制作全景图如果你想制作一张震撼的全景图,Photoshop是一个非常有用的工具。
通过拼接多张照片,你可以将各个角度的景观融合在一起,创造出一个完整而壮观的全景视图。
下面是一个简单的教程,教你如何使用Photoshop进行全景图的制作。
步骤1:准备工作首先,确保你已经拍摄好了需要拼接的照片。
为了获得最佳效果,建议使用三脚架固定相机,保持拍摄时的稳定性。
另外,使用相同的曝光设置和相机参数,以确保照片的一致性。
步骤2:导入照片打开Photoshop软件,将所有需要拼接的照片导入到一个新的工作空间中。
你可以通过点击文件 > 脚本 > 裁切并对齐图像来自动导入照片。
步骤3:自动对齐图像选择所有导入的照片,在菜单栏上选择编辑 > 自动对齐图像。
Photoshop将自动调整和对齐你的照片,以便轻松地进行拼接。
这个过程可能需要一些时间,取决于你导入的照片数量和每张照片的分辨率。
步骤4:创建全景图在自动对齐完照片后,你可以开始创建全景图了。
首先,选择窗口 > 初始化,并设置合适的画布大小和分辨率。
根据你的照片数量和分辨率,你可能需要调整画布的大小。
步骤5:排列照片现在你可以开始排列和拼接照片了。
首先,选择一个作为基准的照片。
通常选择一张居中的照片作为基准是最好的选择。
然后,将其拖动到初始化的画布上,放置在合适的位置。
步骤6:层次调整将基准照片放置好后,你可以开始将其他照片添加到画布上,以创建全景视图。
将每张照片拖动到画布上,覆盖到与基准照片之间重叠的位置。
这样可以通过调整透明度,确保照片之间的对齐度。
步骤7:合并层当你完成排列和对齐所有照片后,右键单击任何一个图层,并选择“融合可见”。
这将合并所有图层,并创建一个新的图层,其中包含整个全景图。
步骤8:修饰和调整全景图已经拼接完成,但你可能还需要进行一些进一步的调整和修饰。
你可以使用Photoshop的各种工具和滤镜来修饰全景图,以获得更好的效果。
一种相机标定参数的柱面全景影像拼接方法
一种相机标定参数的柱面全景影像拼接方法随着人工智能的发展,现代的相机标定系统已经能够实现大规模的数字图像处理操作,包括柱面全景影像拼接。
柱面全景影像拼接技术的主要作用是,将多张全景图片拼接成一张完整的全景图片。
这需要计算机视觉技术完成图像校准和点匹配,以确定每张图片彼此之间的位置关系。
本文介绍了一种基于相机标定参数的柱面全景影像拼接方法,该方法通过检测相机标定参数来获取每张图片的空间中的归一化坐标,从而实现拼接操作。
具体来说,该方法首先需要针对每张图片进行头部校准,以确定图像在视觉坐标系中的位置。
然后,通过检测相机标定参数,将图像的视觉坐标系转换为归一化坐标系,以确定图像在空间中的位置关系。
最后,利用这些信息,系统将每张图片拼接在一起,从而实现柱面全景影像拼接。
该方法具有许多优点,首先,它非常有效:只需要针对每张图片的头部校准,就可以轻松地实现柱面全景影像拼接。
另外,它也能有效提高图像拼接的准确性:利用相机标定参数,可以精准地确定图像之间的位置关系。
最后,它能够很好地处理多种复杂的拼接情况,比如缩放、旋转和偏移等。
本文介绍了一种新颖的基于相机标定参数的柱面全景影像拼接方法,该方法既有效又能实现准确的拼接。
它有着多种优点,可以满足实际应用场景的要求。
然而,该方法仍然存在一些不足之处,例如,图像质量低时可能会影响标定精度,从而导致拼接效果不佳。
为了解决这一问题,可以考虑开发新的图像增强技术,以改善图像质量,提高拼接的准确性。
总之,基于相机标定参数的柱面全景影像拼接技术可以满足实际应用中的要求,它可以有效地实现高准确度、高效率的拼接操作。
未来,需要研究者进一步完善和改进该技术,以使其更加完善、精确、高效。
文献检索论文(全景图像拼接技术)综述

社会科学文献信息检索实习作业学号 01047108 姓名王佳研一、题目:全景图像拼接技术二、数据库简要概述1)中国学术期刊网络出版总库数据库英文名称:China Academic Journal Network Publishing Database(简称CAJD)简介:中国学术期刊网络出版总库是世界上最大的连续动态更新的国学术期刊全文数据库,是“十一五”国家重大网络出版工程的子项目,是《国家“十一五”时期文化发展规划纲要》中国家“知识资源数据库”出版工程的重要组成部分。
出版内容:以学术、技术、政策指导、高等科普及教育类期刊为主,内容覆盖自然科学、工程技术、农业、哲学、医学、人文社会科学等各个领域。
截至2011年6月,收录国内学术期刊 7700多种,包括创刊至今出版的学术期刊4600余种,全文文献总量 3200 多万篇。
资源特色:核心期刊收录率96%;特色期刊(如农业、中医药等)收录率100%;独家或唯一授权期刊共2000余种,约占我国学术期刊总量的30%。
专辑专题:产品分为十大专辑:基础科学、工程科技Ⅰ、工程科技Ⅱ、农业科技、医药卫生科技、哲学与人文科学、社会科学Ⅰ、社会科学Ⅱ、信息科技、经济与管理科学。
十大专辑下分为168个专题。
收录年限:自1915年至今出版的期刊,部分期刊回溯至创刊。
产品形式:WEB版(网上包库)、镜像站版、光盘版、流量计费。
出版时间:1、日出版:中心网站版、网络镜像版,每个工作日出版,法定节假日除外。
2、月出版:网络镜像版、光盘版,每月10日出版。
出版单位:中国学术期刊(光盘版)电子杂志社著作权声明三、检索词全景图像柱面全景图像拼接算法技术四、检索过程概述首先进入中国知网的页面,点击“中国学术期刊网络出版总库”,选择标准检索,运用的检索式是:主题,全景图像,共446条左右的记录。
再次运用检索式是:主题(全景图像and拼接算法),得到了54条结果,检索式是:(全景图像and 应用)and 发展,得到16条结果,检索式(全景图像and 拼接技术),得到19条结果,选择了相关度最高的十篇文献下载下来,结束检索。
基于混合现实技术的实时全景图像拼接研究
基于混合现实技术的实时全景图像拼接研究实时全景图像拼接技术的研究混合现实(Mixed Reality,MR)技术是一种将虚拟世界与现实世界进行融合的新兴技术。
实时全景图像拼接作为混合现实技术的重要组成部分,旨在将多个图像拼接成一个无缝的全景图像,为用户提供具有沉浸感的真实体验。
本文将对基于混合现实技术的实时全景图像拼接进行研究,并探讨其应用领域、挑战和前景。
一、应用领域实时全景图像拼接技术在多个领域中有着广泛的应用。
首先,虚拟旅游方面,通过将多个图像拼接成一个全景图像,用户可以感受到身临其境的旅行体验。
其次,在教育领域,实时全景图像拼接可以为学生提供更加直观、生动的学习环境,并增加学习的趣味性。
再次,在娱乐和游戏领域,实时全景图像拼接可以为用户提供更加真实的游戏体验,增加游戏的可玩性和刺激性。
最后,在医疗领域,实时全景图像拼接可以用于模拟手术环境,帮助医生进行手术实践训练,提升手术的准确性和安全性。
二、技术挑战实时全景图像拼接技术面临着一些挑战。
首先,实时性是关键问题。
由于全景图像的大小和复杂性,实时性成为实现高质量全景图像拼接的挑战之一。
其次,拼接效果的准确性和稳定性需要得到保证。
如何解决图像边缘的错位、色差和畸变等问题,提高全景图像的拼接质量是需要解决的难题。
此外,在多摄像头拼接的情况下,摄像头之间的颜色、曝光、焦距等差异也是需要克服的技术难点。
三、研究方法为了解决实时全景图像拼接的挑战,研究者采用了多种方法。
首先,利用图像特征匹配算法进行全景图像的自动拼接。
这种方法通过检测图像之间的特征点,并利用特征点的匹配关系进行图像拼接,实现全景图像的无缝连接。
其次,使用全景摄像头进行实时全景图像拼接。
全景摄像头是一种可以实时捕捉全景图像的设备,可以利用其提供的图像进行拼接,达到实时的效果。
另外,基于深度学习的方法也被应用于实时全景图像拼接中。
通过训练神经网络模型,可以将全景图像拼接进一步优化,提高拼接质量和效率。
基于图结构的全景图自动识别与拼接方法
ZHAO Yi — Li ,W U Z h o n g - Ke ,Z H ANG Ya n ,XI A Ya n 。
( 1 . Co l l e g e o f Co mp u t e r a n d I n f o r ma t i o n,S o u t h we s t F o r e s t r y Un i v e r s i t y,Ku n mi n g 6 5 0 2 2 4 ,Ch i n a ;
2 .C o l l e g e o f I n f o ma r t i o n S c i e n c e a n d Te c h n o l o g y , B e i j i n g No r ma l Un i v e r s i t y , B e i j i n g 1 0 0 8 7 5 ,C h i n a ;
( 1 . 西南林 业 大学 计 算机 与信 息 学 院 ,云 南 昆明 6 5 0 2 2 4 ; 2 . 北 京师 范大 学 信 息科 学 与技 术学 院 ,北京 1 0 0 8 7 5 ; 3 .西 南林 业 大学 材料 工程 学院 ,云 南 昆明 6 5 0 2 2 4 )
摘 要 :针对 多幅 图像 的匹配和识别 问题 ,提 出了一种基 于图结构的全 自动识 别与拼 接方 法。该 方法能够根据 用户输入 的
Ab s t r a c t :An a u t o ma t i c p a n o r a ma r e c o g n i t i o n a n d s t i t c h i n g me t h o d b a s e d o n g r a p h s t r u c t u r e i s p r o p o s e d t o s o l v e t h e mu l t i p l e i ma g e s r e c o g n i t i o n a n d ma t c h i n g p r o b l e m.Ba s e d o n mu l t i p l e u n o r d e r e d i ma g e s o f u s e r i n p u t ,t h e me t h o d c a n a u t o ma t i c a l l y f i n d
全景图像拼接技术

第6章全景图像的拼接技术全景图像(全景图)的拼接是指利用摄像机的平移或旋转得到的部分重叠的图像样本,生成一个较大的甚至360°的全方位图像的场景绘制方法。
换句话说,就是给定某个真实场景的一组局部图像,然后对这一组图像进行拼接,生成包含这组局部图像的新视图。
目前全景图像基本可分为柱面、球面、立方体等形式,以柱面和球面全景图最易实现而普遍采用。
本节主要介绍柱面和球面全景图像的拼接算法。
全景图的拼接一般有以下几个步骤。
(1)将从真实世界中拍摄的一组照片以一定方式投影到统一的空间面上,如立方体、圆柱体和球体表面等,这样这组照片就具有统一的参数空间坐标。
(2)在这个统一的空间对相邻图像进行比较,以确定可匹配的区域位置。
(3)将图像重叠区域进行融合处理,拼接成全景图。
在全景图的拼接中,一般都是根据图像序列中相邻两幅图像的重叠区域的相似性来实现的,有基于特征的方法和直接方法等。
本章将主要从基于特征的方法和直接方法两方面介绍柱面和球面全景图像的拼接算法技术。
6.1 柱面全景图像拼接技术本节分为两部分:第一部分是基于特征的拼接算法,这种算法主要从两幅图像中选择一系列特征,然后根据相似性原则进行图像间的特征匹配,这一部分介绍了基于特征点和特征块匹配的全景图像拼接算法;第二部分是基于相位相关拼接算法,这种方法是直接从图像的重叠区域对应像素灰度值出发考虑,利用所有可利用的数据实现很精准的匹配。
6.1.1基于特征的拼接算法1.基于特征点的拼接算法本节提出一种基于特征点匹配的柱面全景图像拼接算法。
首先将360°环绕拍摄的序列图像投影到柱面坐标系下:然后提取各图像的尺寸不变特征变换(Scale Invariant Feature Transform, SIFT)特征点,通过特征点匹配完成两幅图像的配准;再根据配准结果计算出图像间的变换参数;最后采用加权平均的融合方法对两幅图像进行无缝拼接。
1)柱面投影变换在进行柱面全景图的拼接过程中,为了保持实际场景中的空间约束关系和实际场景的视觉图6.1.1 柱面投影变换示意图一致性,需将拍摄得到的反映各自投影平面的重叠图像序列映射到一个标准的柱面坐标空间上,即柱面投影,得到柱面图像序列,再进行拼接得到柱面全景图。
全景视觉效果 Photoshop中的连拍合成技巧

全景视觉效果:Photoshop中的连拍合成技巧全景照片是一种可以呈现出广阔视野的照片,它是由多张连续拍摄的照片合成而成的。
Photoshop是一款强大的图像编辑软件,它提供了一些功能和工具,可帮助我们在编辑过程中创建完美的全景照片。
本文将分享一些在Photoshop中使用连拍合成技巧来制作全景照片的方法。
1. 拍摄连续照片要制作全景照片,首先需要连续拍摄多张照片。
在拍摄之前,确保相机设置相同,包括焦距、白平衡和曝光等。
在拍摄时,将相机保持水平,并且将每张照片的一部分重叠,以便在合成时更好地对齐。
2. 导入照片到Photoshop将拍摄的照片导入到Photoshop中。
选择“文件”>“脚本”>“文件加载器”,然后选择所拍摄的照片。
Photoshop将会自动加载这些照片。
3. 自动对齐层在导入照片后,选择所有的图层,在菜单中选择“编辑”>“自动”>“对齐图层”。
Photoshop将会自动对齐这些图层,以确保照片的元素对齐。
4. 自动混合层对齐完图层后,选择所有的图层,在菜单中选择“编辑”>“自动”>“混合图层”。
Photoshop将会根据每张照片的最佳部分来混合图层,以创建出一张完整的全景照片。
5. 裁剪和调整完成自动混合后,可能需要进行一些调整和裁剪。
使用裁剪工具选择所需的区域,并调整图像的亮度、对比度和色彩平衡等参数,以使全景照片看起来更加自然和平衡。
6. 删除不需要的元素有时,在全景拍摄过程中可能会出现一些不需要的元素,例如人、车辆或其他干扰物。
使用修复画笔工具可以轻松删除这些元素。
选择修复画笔工具,选取周围的图像作为样本,然后涂抹在需要修复的区域上,Photoshop会自动将其修复补全。
7. 添加细节和效果完成修复和调整之后,您可以根据需要添加一些细节和效果,以使全景照片更生动和吸引人。
在Photoshop的图层面板中,可以选择调整图层的透明度、色彩效果和滤镜等,以增强整体效果。
全景图像处理中的图像拼接与去畸变技术

全景图像处理中的图像拼接与去畸变技术图像拼接和去畸变是全景图像处理中的两个重要技术,它们能够将多幅图像拼接成一幅无缝的全景图像,并且去除由于摄像机镜头畸变引起的图像形变。
这些技术在虚拟现实、机器视觉和摄影等领域中得到广泛应用。
图像拼接技术是将多个局部图像拼接成一个完整的全景图像。
在图像拼接过程中,主要涉及到特征提取、特征匹配和图像融合等步骤。
首先,特征提取是通过图像中的关键点来描述图像局部特征的过程。
常用的特征提取算法有SIFT (Scale-Invariant Feature Transform)、SURF (Speeded Up Robust Features)和ORB (Oriented FAST and Rotated BRIEF)等。
这些算法通过检测图像中的角点、边缘、纹理等关键点,并计算出其描述子来表示图像的局部特征。
其次,特征匹配是将不同图像中的特征点进行匹配的过程。
特征匹配可以通过计算特征点之间的相似度来找到对应的匹配点对。
常用的特征匹配算法有基于距离的匹配方法,如最近邻匹配和最佳匹配,以及基于几何关系的匹配方法,如RANSAC (Random Sample Consensus)算法。
这些算法能够在多幅图像中找到对应的特征点,并进行匹配,从而建立局部图像之间的对应关系。
最后,图像融合是将匹配的局部图像拼接成一幅无缝的全景图像的过程。
图像融合主要包括图像配准和图像合成两个步骤。
图像配准是将不同图像中的匹配特征点进行坐标变换,使得它们能够在同一坐标系下对齐。
图像合成是将配准后的图像进行融合,常用的图像融合方法有重叠区域的像素平均、像素加权平均和多重保留等方法,以实现无缝的全景图像拼接。
与图像拼接相对应的是图像去畸变技术。
当使用广角或鱼眼镜头拍摄图像时,由于光学畸变的存在,图像中的直线可能会产生弯曲的效果。
去畸变技术旨在通过数学模型和算法来消除光学畸变,以还原图像中的真实场景。
常见的图像去畸变方法包括基于几何模型的方法和基于校正图像的方法。
基于改进归一化互相关配准的口腔头侧序列图像全景图拼接算法
基于改进归一化互相关配准的口腔头侧序列图像全景图拼接算
法
刘峻源;黎希;沈思婉;李章勇
【期刊名称】《计算机应用与软件》
【年(卷),期】2024(41)4
【摘要】在牙科的头颅侧位成像中,使用小视野探测器经过线性扫描获得序列图像。
为了得到头侧全景图,设计一种基于改进归一化互相关配准的拼接算法。
该文使用
高斯混合模型对图像进行分割预处理;将目标区域内的归一化互相关系数作为测度
函数,采用基于小波变换的多分辨率策略与粒子群优化算法提高配准精度;对配准后
的图像进行图像融合,经过多轮连续拼接得到口腔头侧全景图。
实验结果表明,改进
后的算法配准误差波动从[-6,8]缩小到[-1,1],配准结果达到亚像素级。
主观和客观
分析显示,所提算法得到的拼接全景图无拼接缝隙和重影,且质量评价指标为最优。
【总页数】8页(P185-191)
【作者】刘峻源;黎希;沈思婉;李章勇
【作者单位】数字医疗装备与系统重庆市工程实验室(重庆邮电大学)
【正文语种】中文
【中图分类】TP391
【相关文献】
1.改进的基于最大归一化互信息的医学图像配准算法
2.基于预定位图像框架策略的全景图配准拼接算法研究
3.超图约束和改进归一化互相关方法相结合的图像配准
算法4.基于SURF和改进配准的图像拼接算法5.基于改进SIFT的室内全景图像配准算法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
基于模板匹配的全景图像拼接

2008年第4期福建电脑基于模板匹配的全景图像拼接王诚1,李琳2(1.湖北美术学院公共课部湖北武汉4300612.武汉科技大学计算机学院湖北武汉430061)【摘要】:图像拼接在制作全景图中具有重要的作用。
本文提出了一种很健壮的区域模板,它采用Moravec算子定位出特征物体区域,并在次区域上构建基准模板,有效地提高了匹配的可靠性。
在模板匹配中采用加权相似性度量的方法,该方法提高了相似性度量的可靠性。
另外,通过采用一种融合的拼接算法,得到了较平滑的全景图像。
试验结果证实了算法的有效性。
【关键词】:全景图;图像拼接;Moravec算子;特征模板1.引言相邻图像的配准及拼接是全景图生成技术的关键,有关图像配准技术的研究至今已有很长的历史,其主要的方法有以下两种:基于两幅图像的亮度差最小的方法和基于特征的方法。
本文采用基于特征模板匹配特征点的拼接方法。
该方法允许待拼接的图像有一定的倾斜和变形,克服了获取图像时轴心必须一致的问题,同时允许相邻图像之间有一定色差。
试验证明采用该方法进行全景图拼接有较好的效果。
全景图的拼接主要包括以下4个步骤[1]:图像的预拼接,即确定两幅相邻图像重合的较精确位置,为特征点的搜索奠定基础。
特征点的提取,即在基本重合位置确定后,找到待匹配的特征点。
图像矩阵变换及拼接,即根据匹配点建立图像的变换矩阵并实现图像的拼接。
最后是图像的平滑处理。
2.基于特征模板匹配的图像拼接2.1基本原理对于待拼接的两幅图像,在第二幅图像的左侧选取一定大小的模板矩阵(一般为5×5到21×21个像素),在第一幅图的右侧搜索找到与其相关性最大的模板矩阵,然后计算出两幅图像重叠的位置。
通过坐标映射,最终实现拼接。
2.2Moravec选取特征模板采用Moravec算子进行特征区域提取的依据是对于一个模板窗口计算其X方向、Y方向及正负45度方向的最小灰度方差值,并与预先设定的阈值进行比较。
对于彩色图像可以采用将图像转化为灰度图来处理。
航拍图像序列自动拼接技术
1 航拍图像序列自动拼接技术与地图重建航拍图像序列自动拼接是指将一组内容上相关的航拍图像自动拼接为一幅能够更为全面描述场景内容的全景图像的过程。
鉴于视觉系统中存在的分辨率与视场范围之间的固有矛盾,为了保证较高的分辨率,单幅的航拍图像对应的场景区域通常较小,不利于准确、全面地观察和分析地面场景。
而航拍图像自动拼接技术正是解决这一问题的有效途径。
航拍图像拼接主要包括配准和镶嵌两个步骤,其中的核心是图像配准。
人们已经提出了很多配准方法,如灰度相关法、相位相关法、基于特征的方法等。
其中,基于特征的方法首先在两幅输入图像中分别提取具有不变性的特征点,然后通过搜索比较得到一组匹配的特征点对,并利用这些特征对之间的对应关系估计出全局变换参数,最后借助估算出的变换模型将两幅图像校正到同一平面上,从而实现配准。
相对于其他方法,基于特征的配准方法能够容忍更大的图像差异,有助于获取稳定的配准结果。
基于特征的配准方法主要有三个步骤:提取特征点、搜索匹配点和计算转换矩阵。
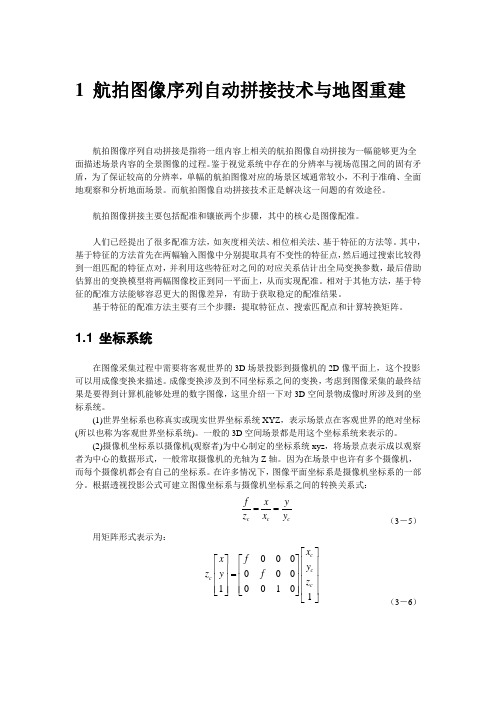
1.1 坐标系统在图像采集过程中需要将客观世界的3D 场景投影到摄像机的2D 像平面上,这个投影可以用成像变换来描述。
成像变换涉及到不同坐标系之间的变换,考虑到图像采集的最终结果是要得到计算机能够处理的数字图像,这里介绍一下对3D 空间景物成像时所涉及到的坐标系统。
(1)世界坐标系也称真实或现实世界坐标系统XYZ ,表示场景点在客观世界的绝对坐标(所以也称为客观世界坐标系统)。
一般的3D 空间场景都是用这个坐标系统来表示的。
(2)摄像机坐标系以摄像机(观察者)为中心制定的坐标系统xyz ,将场景点表示成以观察者为中心的数据形式,一般常取摄像机的光轴为Z 轴。
因为在场景中也许有多个摄像机,而每个摄像机都会有自己的坐标系。
在许多情况下,图像平面坐标系是摄像机坐标系的一部分。
根据透视投影公式可建立图像坐标系与摄像机坐标系之间的转换关系式:c c c f x y z x y ==(3-5)用矩阵形式表示为:0000010101c c c c x x f y z y f z ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ (3-6)(3)像素坐标是用来表示图像阵列中图像像素位置的坐标,它也称图像阵列坐标或网格坐标。
无人机序列影像匹配及拼接方法研究的开题报告

无人机序列影像匹配及拼接方法研究的开题报告摘要:随着无人机技术的不断发展,无人机航拍影像在农业、测绘等领域得到广泛应用。
其中,无人机序列影像的拼接具有重要意义。
本文将针对无人机序列影像匹配及拼接问题进行研究。
首先,通过对序列影像的特征提取与描述,确定序列影像中同一场景中的匹配点。
接着,采用基于区域的图像特征匹配算法对匹配点进行初步筛选与筛除。
最后,利用图像拼接技术对符合条件的匹配点进行图像拼接。
本研究将提出一种基于无人机序列影像匹配的新型拼接算法,并通过实验验证评估其性能。
关键词:无人机;序列影像;匹配;拼接;特征提取;区域特征1.研究背景与意义随着无人机技术的发展与普及,无人机航拍影像在农业、测绘等领域得到广泛应用。
而无人机在完成任务后,将产生大量的序列影像,需要将这些影像拼接成一幅大图像,才能更好地反映出所拍摄场景的整体情况。
因此,无人机序列影像的拼接是无人机应用中的一个重要环节。
同时,无人机序列影像匹配及拼接技术也是计算机视觉领域中的热点问题。
传统的图像匹配及拼接技术往往存在着灰度、噪声、遮挡等问题。
而无人机拍摄的序列影像由于视角变化、光照变化、物体运动等因素,使得匹配及拼接技术的难度进一步增加。
因此,基于无人机序列影像的匹配及拼接算法的研究,对提高无人机航拍影像的质量具有重要意义。
2.研究内容与方法本研究将以无人机航拍影像为基础,针对无人机序列影像匹配及拼接问题进行研究。
研究内容包括以下三个方面:(1)无人机序列影像特征提取与描述在实际应用中,无人机拍摄的序列影像存在着视角变化、光照变化、物体运动等因素,造成场景中相邻帧之间的差异较大。
因此,需要对无人机序列影像的特征进行提取,便于后续的匹配与拼接。
在本研究中将采用基于SIFT、SURF、ORB等算法的特征提取与描述方法。
(2)序列影像匹配在完成特征提取与描述后,需要对同一场景中的序列影像进行匹配。
本研究将提出一种基于区域的图像特征匹配算法,在筛选匹配点时,主要考虑相邻区域内的特征匹配,减少因场景差异辉发生的误匹配。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2002212224作者简介:胡社教(1964-),男,安徽歙县人,博士生,合肥工业大学副教授;陈宗海(1963-),男,安徽桐城人,博士,中国科学技术大学教授,博士生导师.第26卷第4期合肥工业大学学报(自然科学版)V o l .26N o .42003年8月JOU RNAL O F H EFE I UN I V ER S IT Y O F T ECHNOLO GY A ug .2003基于序列图像的全景图像拼接胡社教1, 江 萍2, 陈宗海3(1.合肥工业大学计算机与信息学院,安徽合肥 230009;2.合肥工业大学电气与自动化工程学院,安徽合肥 230009;3.中国科学技术大学自动化系,安徽合肥 230026)摘 要:基于图像建模和绘制的虚拟环境构造是近年来虚拟现实技术研究的热点。
其中基于序列图像的全景图像拼接技术研究是虚拟环境临场感的一个关键因素,文章以普通照相机拍摄的序列图像为基础,通过相邻两幅序列图像差值图像极值点的搜寻,可以快速提取两幅序列图像之间的重叠部分,并采用线性加权法使得缝合后的图像自然、逼真。
最后给出了本算法在PC 机拼接的效果图。
关键词:虚拟现实;全景图;序列图像;图像拼接中图分类号:T P 391.9 文献标识码:A 文章编号:100325060(2003)0420525204Panoram ic i m age m osa ic ba sed on sequence i m age HU She 2jiao 1, J I AN G P ing 2, CH EN Zong 2hai3(1.Schoo l of Computer and Info r m ati on ,H efei U niversity of T echno logy ,H efei 230009,Ch ina ;2.Schoo l of E lectrical Engineering and A utom ati on ,H efei U niversity of T echno logy ,H efei 230009,Ch ina ;3.D ep t .of A utom ati on ,U niversity of Science and T echno logy of Ch ina,H efei 230026,Ch ina )Abstract :V irtual environm en t bu ilding based on i m age m odeling and rendering is the ho t po in t of the research on virtual reality techno logy ,and the pano ram ic i m age m o saic techno logy based on sequence i m age is a key to ach ieve virtual environm en t telep resence .In th is pap er ,the sequence i m ages taken by u sing o rdinary digital cam era are u sed and the differences of tw o adjacen t sequence i m ages are calcu lat 2ed in search of the m in i m um po in t ,then the overlapp ing part betw een the tw o sequence i m ages can be ob tained fast .B y adop ting the linear w eigh t m ethod ,the m o saic i m age is m ade m o re natu ral and life 2like .T he m o saic i m age realized on the personal com pu ter is also given to show the effectiveness of the p resen ted algo rithm .Key words :virtual reality ;pano ram ic i m age ;sequence i m age ;i m age m o saic虚拟现实是指通过人的多种感知通道(视觉、听觉、触觉、嗅觉及味觉等)进行实时模拟与交互的高级人机界面系统。
虚拟现实的关键在于虚拟场景建模——虚拟世界的构造。
围绕虚拟场景建模问题的解决方式主要有两种:基于计算机图形学的三维几何模型建模和绘制(Geom etry 2B ased M odeling andR endering2GBM R),该方法对系统的硬件计算能力和图形加速性能都有很高的要求,一般用在基于高性能图形工作站的系统。
另一种建模方式是近几年发展起来的基于图像的建模和绘制(I m age2B ased M odeling and R ending2I BM R)技术,它用于待建三维虚拟空间的有限幅图像样本,在一定的图像处理算法和视觉计算算法的基础上,来直接构造三维场景。
全景图像拼接是利用照相机平移或旋转得到的部分重叠图像样本生成一个较大的甚至左右对接的全方位图像的场景绘制方法。
图像拼接的主要问题是处理相邻2个图像样本之间的重叠部分,M c M il2 liam s和B ishop等提出的全景图拼接算法,依据摄像机绕轴旋转360°所拍摄的序列图像求解摄像机参数,进行全景图拼接,该算法对相邻帧间摄像机的转动角度有严格的限制,要求相邻帧间有2 3以上的重叠[1,2]。
A pp le公司开发的Q u ick T i m e V R系统是用I BM R技术构建全景环境最成功的商业软件,但该系统需要昂贵的摄影器材和复杂的摄像机校准工作。
本文提出的基于序列图像的全景图拼接算法,在保持照相机绕垂直轴线均匀旋转的前提下,当相邻图像序列有1 15~1 10重叠时就能实现自动拼接。
该算法以普通照相机拍摄的序列图像为基础,根据相邻两幅图像中特征区域像素灰度差值极小原理,确定两幅图像的重叠区域匹配。
综合考虑图像自然度和缝合速度2个方面的因素,提出了重叠区域图像淡入淡出自然缝合算法。
实验结果表明,本算法能够实现序列图像的全自动匹配和缝合,拼接效果较理想。
1 基于I BM R的全景图像生成用I BM R方法构建虚拟环境场景时,其图像样本可以来自普通的照相机、全景照相机或由计算机绘制。
对于不同类型的图像输入,全景图生成的方法也有所差异。
全景图生成是构建基于图像绘制虚拟现实系统的关键,根据图像投影方式的不同,全景图一般可以分为立方体形、圆柱形和球形3种模式,不同的全景图模式的获取难易程度和控制难易程度都有很大不同,目前普遍采用圆柱面投影方式。
全景图的生成有3种途径:(1)计算机绘制。
该方法利用计算机图形学技术建立场景模型,并绘制虚拟环境的全景图。
绘制全景图过程不需要实时控制,因而可以绘制出比较复杂的场景和采用真实感较强的光照模型。
其优点是可以容易地得到任意形状的全景图且不需要任何附加步骤,缺点是建模相当费时和繁琐。
(2)全景照相机。
该方法的优点是不需要进行复杂的建模就能得到虚拟环境的全景图,缺点是需要昂贵的专用设备。
(3)普通照相机。
该方法是由普通照相机拍摄一系列相互重叠的环境照片,对图像样本(序列)进行透视变换、图像拼合、图像变形、图像合成及裁剪,最后将它们拼接成一幅全景图。
其优点是可以做成任何形状的全景图且不需要专用的设备,另外还可以对每幅照片进行曝光控制,得到光强分布比较平衡的全景图,此方法的关键是做一个很好的无缝拼接工具[2,3]。
2 全景图像拼接图像拼接的具体实现过程,如图1所示。
图1 图像拼接流程625 合肥工业大学学报(自然科学版) 第26卷对于采用普通照相机拍摄到的一系列相互重叠的环境照片,拼接成一幅全景图要经过图像透视变换、图像拼接、图像变形及图像合成等步骤,其中,图像拼接质量的好坏直接影响虚拟环境场景的临场感和沉浸感。
图像拼接要解决的关键是对相邻两幅图像样本之间重叠部分的处理,因摄像机在拍摄序列照片过程中镜头角度的差异,在进行图像匹配和拼接之前必须对其进行相应的折叠变换,使两幅图像统一到相同的图像空间,经折叠变换之后的两幅图像就可以进行图像重叠区域的匹配和缝合[4]。
2.1 基于差值图像极值匹配具有重叠区域的两幅图像,重叠范围的确定主要是基于相邻两幅图像重叠部分对应像素的相似性。
常用的一种方法是基于面积的算法,即取前一幅图像中的一区域作为模板,在第2幅图像中搜索具有相同(或相似)值的对应区域,从而确定两幅图像的重叠范围。
这种算法计算量太大,且受光照条件的影响,往往不能满足实用性要求。
也有学者提出从第一幅图像的重叠区域取相互平行两列上部分像素,用它们的比值作为模板,在第2幅图像中由左至右依次从间距相同的两列上取出部分像素,并逐一计算其对应像素值比值,然后将这些比值依次与模板进行比较,其最小差值对应的列就是最佳匹配[4]。
运用M u lti 2m ask s 方法将多个图像的选定区域同时融合在一起,并利用小波变换对图像进行多分辨分解,采用与频段宽度成正比的加权拼接宽度来消除拼缝的影响[5]。
上述算法在实施过程中常常陷入匹配模块的局部最优,导致图像拼接的失败。
本文基于差值图像的极值点搜寻,提出了一种新的重叠区域的搜寻方法,它可以方便地提取两幅图像之间的重叠部分,其差值图像匹配原理,如图2所示。
图像1的右端和图像2的左端具有如图2所示的重叠区域,算法设定了一个指针Κ来确定图像的计算区域,Κ从图像1右端开始向左移动,相应Κ从图像2左端向右移动,由Κ所决定的区域为计算区域,图像1和图像2在计算区域内的差值图像的相似度差值函数定义为J =6 H 1(i ,j )-H 2(k ,l ) 其中,i 、j 、k 、l 分别属于图像1和图像2计算范围内的像素坐标;H 1(i ,j )和H 2(k ,l )是计算区域内的像素点灰度值。
相似度差值函数随变量Κ的变化曲线,如图3所示。
在Κ=Κm 处达到极小值,这样问题就简化为寻找Κm 。
在图像的纵向上同样可以进行类似的搜索,以寻找到满足匹配条件的最优匹配。
实验表明,本算法能够精确地找到两幅相互重叠图像的匹配点(精度上不超过1个像素),并且只进行加减法运算,通过合适选取Κ,收敛速率很快。
725第4期 胡社教,等:基于序列图像的全景图像拼接现了图像的自然拼接,达到淡入淡出的效果。