QSC24E(NANO)可编程控制舵机板使用说明
黄石科威24V新型EC、EP说明书
AI6+、AI6-:6#通道模拟量输入端子,接热电偶、标准信号、PT100 信号。 AI7+、AI7-:7#通道模拟量输入端子,接热电偶、标准信号、PT100 信号。 AI8+、AI8-:8#通道模拟量输入端子,接热电偶、标准信号、PT100 信号。 AI9+、AI9-:9#通道模拟量输入端子,接热电偶、标准信号、PT100 信号。 CANH、CANL:CAN 网络接口端子。 A、B : RS485 网络端子 A+、B-,固化 CAN 网络配置、组建 RS485 网络。固化 CAN 网络配置时要另配 485/232 转换器。 RS0:编程口,为 232 接口,配专用通讯电缆,下载程序、与人机界面连接。 拨码开关:运行控制端子,拨动拨码开关,可编程控制器处于 RUN 或 STOP 状态。
壁挂式垂直安装
4
★ 接地方式 专用接地(最好) 共用接地(可) 公共接地(不可)
1.2 外形结构尺寸
产品型号
L(mm) 产品型号
L(mm)
EC/P-08M08R-24 100
EP-10H-24
100
EC/P-08M08T-24 100
EP-32M-24
140
EP-10E-24
100
EP-32T-24
使用注意事项
● 可编程控制器的安装位置尽量远离高电压、强电流、高频率等对周围有较强干扰的设备。 ● 请一定在可编程控制器外部组成紧急停电电路,制止正反动作同时进行的连锁电路、上下限定位连锁电路。 ● EC/EP 系列可编程控制器指令集有 86 条指令,如果程序中含有超出这 86 条指令范围的指令,可编程控制器运行时会出错。 ● 在下载梯形图或固化 CANSET 时,下载完毕后,将拨码开关拨到 RUN,等可编程控制器运行后,才能断电,否则,程序得不到固化。 ● 对于变更运行中的程序、强制输出、RUN、STOP 等操作,必须熟读使用手册,充分确认其安全之后进行。
QSC24ENANO可编程控制舵机板使用说明要点
QSC24ENANO可编程控制舵机板使用说明要点1.引言(100字):2.特性(200字):QSC24ENANO支持最多24个舵机,每个舵机都有独立的PWM输出。
它采用高性能的STM32F030C8T6单片机,内置四通道驱动芯片,可直接驱动舵机,无需其他设备。
该板还支持通过I2C总线进行网络扩展,可同时驱动多块扩展板。
3.连接方法(200字):首先,将QSC24ENANO插入主控制器的GPIO引脚,并连接电源。
接下来,将舵机的信号线插入QSC24ENANO的相应引脚上,确保舵机的电源线和地线与QSC24ENANO相连接。
最后,连接其他扩展板或外设,如传感器或显示屏。
4.控制方式(300字):可以通过多种方式控制QSC24ENANO,包括手动控制、编程控制和远程控制。
手动控制可以通过按钮、滑块或旋钮等输入设备实现。
编程控制可以使用C、C++、Python等语言编写程序,通过串口或无线模块将程序加载到主控制器上。
远程控制可以使用红外遥控器或无线控制器等遥控设备,通过无线通讯方式与QSC24ENANO通信。
5.编程方法(400字):QSC24ENANO可通过多种编程方法进行控制。
首先,可以使用官方提供的库函数进行编程,该库函数提供了丰富的API接口,方便用户进行开发和控制。
其次,支持通过Arduino IDE进行编程,用户可以选择适合自己的开发环境和编程语言。
此外,还可以使用ROS(机器人操作系统)进行编程,ROS提供了强大的工具和库,方便用户进行机器人控制和协作开发。
在编程过程中,用户可以根据实际需求对舵机进行控制。
可以控制舵机的位置、速度和加速度等参数,还可以进行运动轨迹规划和复杂动作序列控制。
用户还可以通过编程实现舵机的同步运动、互动控制和多舵机协同等功能。
6.实例应用(200字):QSC24ENANO可广泛应用于机器人、航模和其他遥控应用。
在机器人领域,可以用于控制机器人的关节和执行器,实现机器人的运动和动作。
飞鸿24路舵机控制器使用说明书

FH24路舵机控制器使用说明书飞鸿科技2012-5-24一、产品介绍 (2)二、接口说明 (3)三、指令说明 (4)1、波特率识别指令 (4)2、舵机移动指令 (5)3、动作组指令 (5)4、脱机运行 (6)四、24路舵机调试软件使用说明 (6)二、连接PC上位机 (8)三、上位机界面编辑 (9)四、单路舵机调试 (11)五、动作组编辑 (11)六、下载调试窗口 (12)五、无线通信 (13)一、蓝牙遥控 (14)1、硬件连接 (14)2、蓝牙设置 (14)二、红外遥控 (18)1、硬件连接 (18)2、应用举例 (18)六、注意事项及故障解决 (19)一、产品介绍1、使用32位ARM芯片,运行速度快,控制精度高。
2、多达24路独立的舵机控制通道,满足大部分用户需求3、512K动作存储,轻松实现脱机运行。
4、1us的位置控制精度,支持命令控制,速度控制(做机器人应选择能进行速度控制的控制器)5、自动识别波特率,方便使用在各种场合。
6、3.8*4.8cm的尺寸。
体积小,重量轻,便于集成到各种人型机器人、仿生机器人、多自由度机械手中。
7、具有联机、脱机、蓝牙无线控制、红外无线控制四种工作模式。
联机模式下,可以通过上位机或单片机进行控制;脱机模式下,自动运行预先通过上位机烧写好的动作,板载512K动作存储器;还可以用蓝牙或者红外遥控器无线控制。
8、控制接口:miniUSB,只需一根usb线即可方便的用电脑给机器人编辑动作,控制机器人运行。
配套的无线通信模块支持蓝牙、红外遥控器控制。
配套的功能强大的PC上位机软件,支持界面编辑,舵机角度编辑,全速/单步调试,动作保存、动作下载、脱机运行设置。
这一切只需动动鼠标,没有任何基础也能搞定。
二、接口说明1、MiNiUSB:可以用来供电,也可以用来通信。
只需用本产品赠送的usb线将控制器与电脑的usb口连接起来就可以控制舵机转动。
2、控制电源接口:给单片机等控制电路供电,如果使用USB供电,此处可不接电源。
舵机控制板使用说明V3torobot

舵机控制板使用说明V3.3规格参数1. 舵机电源和控制板电源分开,独立供电2. 控制通道:同时控制32 路。
(舵机速度可调)3. 通讯输入:USB 或者串口(TTL)4. 信号输出:PWM(精度0.5us)。
5. 舵机驱动分辨率:0.5us , 0.045 度。
6. 波特率范围:9600 19200 38400 57600 115200 128000。
7. 支持的舵机: Futaba 、 Hitec 、辉盛、春天,等市面上 98%以上的舵机8. PCB 尺寸:63.5mm×43.5mm。
9. 安装孔间距:55*35.5mm。
10.存储空间:板载16M U 盘。
1)供电说明本模块电源部分是分离设计的,控制板电源和舵机电源是分开供电的,这样不会相互干扰。
a)控制板电源VSSUSB 接口和蓝色端子中的 VSS 和 GND 都可以给控制板供电,两者任选一种即可。
(VSS 的供电范围是 6.5-12V)b)舵机电源VS舵机的供电情况是根据使用的舵机而定,可以查阅舵机的相关参数,若你不了解,可以使用5V 供电。
VS输入多少付电压,给舵机的就是多少付的电压,所以必须严格匹配舵机的电压参数舵机电源输入接口为蓝色接线端子中的 VS 和 GND。
(控制板电源和舵机电源中的GND 是共用的)常规舵机的电压参数MG995、MG996 供电电压为 4.8-6.8V TR213、TR223、1501MG 供电电压为 4.8-7V TR227 供电电压 4.8-7.2V未知舵机,请给 5V 供电(标准舵机 99%都可以用 5V 供电)如果供电电压超过舵机的范围,有可能造成舵机烧坏,或者烧坏舵机控制板。
请用户谨慎操作,查看舵机的相关参数。
舵机电源的其他说明请看 11 页。
2)安装驱动驱动下载地址:/down/usc_driver.exe (全部小写)直接双击 USC_driver.exe ,点击下一步即可安装驱动。
驱动安装过程中如果出现下面的提示,请选择“始终安装此驱动程序软件”。
舵机控制板使用说明
毛毛雨24路舵机使用说明书
一.毛毛雨24路舵机基本功能
独家特点:采用高速CPU(atme32),处理速度更快,控制更精确,运行更稳定。
你可以不会编程,但是你只要使用你的鼠标,你的机器人就会舞动起来、
完美的脱机运行功能,不要外接单片机,更不要连接PC,即可运行数千个动作指令。
自动识别波特率(9600,19200,38400,57600.1115200,128000)自动识别
真正的舵机运行,按一个开关就可解决问题
USB和TTL串口费用不同的IO口分开处理,绝对没有任何干扰。
产品参数:
1.控制芯片供电范围:4.5V-5.5V(自带稳压芯片,无需多个电源)
2.舵机部分供电范围:DC直流(电压与舵机参数有关,一般使用5-8vDC)
3.信号输出:pwm(精度1us
4.
5.
使用过程:
1、,收到我们的宝贝时,请检查舵机控制板套件是够齐全,包括舵机控制板一块,usb转串口一块,串口线一条。
如果配件不齐全请立刻与我们的客服人员取得联系。
2使用前请先洗手,防静电,舵机控制板在使用时经历,抓住舵孔板的边缘部分,切勿将舵控孔板背面与金属物质接触,防止发生多路烧坏舵机板。
3usb转串口与舵机控制板的连接:用串口线将usb转串口模块与舵机控制板连接起来。
对应的连接为VCC接VCC GND接GND,RXD接RXD TXD接TXD。
(注明;在实际的单片机应用中,一般RXD是接TXD,而TXD是接RXD的。
)
74hc595引脚图管脚图
2008年01月11日 23:59 本站原创作者:本站用户评论(0)
关键字:74(239)
74hc595引脚图
引脚说明。
电动液压舵机的操作与管理解读
四、电动液压舵机运行管理
1.油位 工作油箱中油位应经常保持在油位计显示范围的2/3左右。如油位增高,可能是油中进入过多 空气或冷却器漏水;如油位降低过快,则表明有漏油处,应查明修复,然后经过滤器向油箱 补油。 2.油温 工作时最合适的油温是30~ 50℃。油温高于50℃时应使用油冷却器。油箱油温(泵进口处) 通常应不高出室温30℃以上,且一般应不超过60℃。当油温超过70℃时,油液的氧化变质速 度就将显著加快,一般应停止工作,查明原因,加以解决。油温低于10℃时不宜启动,室温 太低时应启用舵机室加温器。如油温低于10℃但尚不低于-10℃,而又急需启动,可让油泵在 油路旁通的情况下,空载运转一段时间或实行小舵角操舵,直至油温升至10℃以上再正常使 用。 3.油压 在主油路中,主泵排出油压应不高于说明书标定的最大工作油压,而主泵吸入侧的油压, 则应不低于吸油条件(开式系统)所确定的正常数值。辅油路中各处油压应符合设计要求。 4.滤器 运行中应经常注意滤器前后压差,及时清洗或更换滤芯(依其种类确定)。 初次使用的舵机更应注意清洗滤器。若在清洗滤器时发现金属屑,必须严密注意其属性 及增长情况,如金属屑数量继续增加,则表明系统内部有部件损坏。
电动液压舵机的操作与管理
一、电动液压舵机启动
1.启动前的准备 (1)检查油箱油位,保持在2/3左右; (2)检查各联轴节的连接紧固件是否松动,向各摩擦部位注油; (3)检查各阀件及管接头是否有漏泄; (4)操舵仪上的机组选择开关、操舵方式、选择开关以及转换箱上 的选择开关放“1”位,转换箱上的操纵部位转换开关置于“舵机 舱”。 (5)检查各阀门是否在所要求的位置上。 2.启动 (1)推上电闸、合上电源开关; (2)将转换箱上的机组选择开关扳至待用泵; (3)在启动箱上按启动。
QSPLCWSM可编程控制器实验指导书

第一章可编程控制器基本指令 (2)第二章可编程控制器实验 (4)实验一喷泉的模拟控制 (4)实验二数码显示的模拟控制 (6)实验三舞台灯光的模拟控制 (9)实验四天塔之光的模拟控制 (12)实验五交通灯的模拟控制 (15)实验六四节传送带的模拟控制 (18)实验七轧钢机的模拟控制 (24)实验八邮件分拣的模拟控制 (26)实验九装配流水线的模拟控制 (33)实验十液体混合的模拟控制 (37)实验十一机械手的模拟控制 (39)实验十二四层电梯的模拟控制.................................................................................. 错误!未定义书签。
实验十三Y/△换接起动的模拟控制 . (42)实验十四五相步进电机的模拟控制 (49)实验十五水塔水位的模拟控制 (51)变频器介绍 (53)实验一变频功能参数设置与操作 (55)实验二变频器报警与保护功能 (58)实验三多段速度选择变频调速 (60)实验四控制电机正反转及点动控制 (61)实验五控制电机运行时间操作 (63)实验六瞬间停电变频器参数设定 (64)实验七外部电压电流变频调速 (65)实验八三相异步电动机的变频开环调速(操作面板BOP) (67)实验九PLC控制电机正反转 (68)实验十PLC控制多段调速 (69)实验十一基于PLC通信方式的变频器开环调速实训 (70)一.实验目的熟练掌握可编程控制器的基本指令。
二.实验内容基本指令如表所示。
1.标准触点LD、A、O、LDN、AN、ONLD,取指令。
表示一个与输入母线相连的常开接点指令,即常开接点逻辑运算起始。
LDN,取反指令。
表示一个与输入母线相连的常闭接点指令,即常闭接点逻辑运算起始。
A,与指令。
用于单个常开接点的串联。
AN,与非指令。
用于单个常闭接点的串联。
O,或指令。
用于单个常开接点的并联。
ON,或非指令。
三菱QCPU(Q模式)编程手册(SFC控制指令篇)

MITSUBISHI
可编程控制器
• 安全注意事项 •
使用本产品前请阅读本说明 当使用三菱可编程控制器 MELSEC-Q/QnA 系列时 请仔细阅读本手册及本手册提到的相关资料 还要注 意安全并正确使用于产品 请仔细保管本手册 把它放在最终使用者易于取阅的地方 并请把本手册的拷贝件发给最终使用者
3.1 与 SFC 程序有关的性能规格 ......................................................................................................................3-1 3.2 软元件列表 ..................................................................................................................................................3-3 3.3 SFC 程序的处理时间 ..................................................................................................................................3-5 3.4 计算 SFC 程序容量 .....................................................................................................................................3-9 4. SFC 程序配置 4-1 至 4-74
舵机操作指南
舵机操作指南
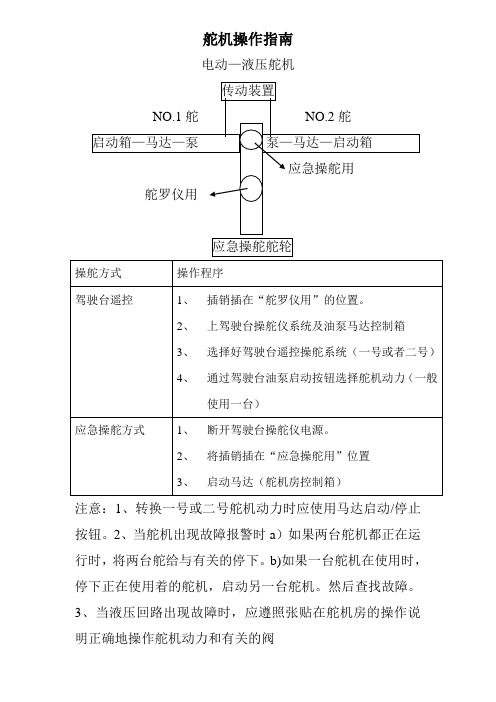
电动—液压舵机 传动装置 NO.1 舵 启动箱—马舵用 舵罗仪用
应急操舵舵轮
操舵方式 驾驶台遥控 操作程序 1、 2、 3、 4、 插销插在“舵罗仪用”的位置。 上驾驶台操舵仪系统及油泵马达控制箱 选择好驾驶台遥控操舵系统(一号或者二号) 通过驾驶台油泵启动按钮选择舵机动力(一般 使用一台) 应急操舵方式 1、 2、 3、 断开驾驶台操舵仪电源。 将插销插在“应急操舵用”位置 启动马达(舵机房控制箱)
注意:1、转换一号或二号舵机动力时应使用马达启动/停止 按钮。2、当舵机出现故障报警时 a)如果两台舵机都正在运 行时,将两台舵给与有关的停下。b)如果一台舵机在使用时, 停下正在使用着的舵机,启动另一台舵机。然后查找故障。 3、当液压回路出现故障时,应遵照张贴在舵机房的操作说 明正确地操作舵机动力和有关的阀
24键控制器说明书起点星照明

控制器使用说明书
24键控制器为LED灯光控制的配套产品,和LED光源,开关电源组成完整的灯光系统。
一、主要指标:
工作温度:-20-60℃供电电压:DC12V
外形尺寸:L62×W35×H23mm 包装尺寸:L160×W95×H51mm
净重:50g 毛重:70g
输出:三个CMOS漏极开路输出; 连接方式:共阳/共阴
额定负载电流:每路2A 最大负载电流:每路2.5A
二、控制方式:
采用24键红外遥控,带记忆存储功能,遥控器位置与按键功能对应表如下:
亮度升(共8级)亮度降(共8级)关闭负载输出开启负载输出
静态红色静态绿色静态蓝色静态白色
静态橙色静态淡绿色静态深蓝色七彩跳变
静态深黄色静态青色静态褐色整体渐明渐暗
静态黄色静态浅蓝色静态粉红七彩渐变
静态淡黄色静态淡蓝色静态紫色红绿蓝三色跳变
三、连线图:
四、实物图:
五、注意事项:
1、本产品供电电压为DC12V,不得接到其他电压上。
2、不得相互短接,引起短路。
3、引出线应按照接线图提供的颜色,正确接线。
4、本产品的质保期为壹年,质保期内包换包修,但不包括人为损坏或超负荷工作的情形。
2.使用说明

舵机控制板使用说明V3.0规格参数1. 舵机电源和控制板电源分开,独立供电2. 控制通道:同时控制 16 路。
(24路舵机控制板可以控制24路)(舵机速度可调)3. 通讯输入:USB 或者串口(TTL)4. 信号输出:PWM(精度 0.5u s)。
5. 舵机驱动分辨率:0.5us , 0.045 度。
6. 波特率范围:9600 19200 38400 57600 115200 128000。
7. 支持的舵机: Futaba 、 Hitec 、辉盛、春天,等市面上98%以上的舵机8. PCB 尺寸:63.5mm×43.5mm。
9. 安装孔间距:51*43.5mm。
10.存储空间:512k。
1)供电说明本模块电源部分是分离设计的,控制板电源和舵机电源是分开供电的,这样不会相互干扰。
a)控制板电源VSSUSB 接口和蓝色端子中的 VSS 和 GND 都可以给控制板供电,两者任选一种即可。
(VSS 的供电范围是 6.5-12V)b)舵机电源VS舵机的供电情况是根据使用的舵机而定,可以查阅舵机的相关参数,若你不了解,可以使用5V 供电。
VS 输入多少付电压,给舵机的就是多少付的电压,所以必须严格匹配舵机的电压参数舵机电源输入接口为蓝色接线端子中的 VS 和 GND。
(控制板电源和舵机电源中的GND 是共用的)常规舵机的电压参数MG995、MG996 供电电压为 4.8-6.8V TR213、 TR223、1501MG 供电电压为 4.8-7V TR227 供电电压 4.8-7.2V未知舵机,请给 5V 供电(标准舵机 99%都可以用 5V 供电)如果供电电压超过舵机的范围,有可能造成舵机烧坏,或者烧坏舵机控制板。
请用户谨慎操作,查看舵机的相关参数。
舵机电源的其他说明请看倒数第二页。
2)安装驱动驱动下载地址:/down/usc_driver.exe (全部小写)直接双击 USC_driver.exe ,点击下一步即可安装驱动。
QSC24E(NANO)可编程控制舵机板使用说明要点

舵机板上位机软件使用说明参考QSC32E使用说明这里详解ARDUINO-NANO配合舵机板QSC24E-NANO来解码PS2并使用手柄按键的功能,以及ARDUINO对舵机板接口通讯说明。
此功能仅QSC24E-NANO可用此舵机板套件分别为3块PCB组成,最左边为24路带过载保护的舵机控制板,(专门处理多路舵机控制)。
中间为ARDUINO-NANO编程控制板,PRO-MINI 为编程控制主板(专门负责处理数据编程)使用,最右边为的串口调试板(可给舵机板调试也可给ARDUINO-NANO下载程序)。
此舵机板,他上面可直接插PS2手柄的接收器,其解码是通过ARDUINO-NANO 来完成的。
L1:舵机供电电源指示灯L2:通讯指示灯,随着主板接收外部信号L2跟着同步闪动L3:舵机板状态显示灯。
此舵机板带有电压检测功能,当VSS主板电压低于6.8V (默认为7.4V锂电池供电),或者舵机(+-)电压低于5.5V(默认为7.4V锂电池接入1.3V降压二极管),此时L3灭掉,并伴随喇叭报警。
提示电池电压不足用户需要给电池充电1.驱动的安装:插上CP2102串口设备的USB线,并安装驱动,驱动为ARDUINO-QSC24E(CP2102)驱动对应不同的操作系统选择不同的驱动文件安装,这里注意,如果驱动没有安装时候CP2102串口设备的红色指示灯不会亮,只有正确安装好驱动后,CP2102串口板上的红色指示灯才点亮。
机软件Q-robot_Servo_Control调试机器人舵机即通过编程软件软件arduino下载机器人主程序。
2.主板的供电VSS表示主板供电正极电压,供电电压为6.5V-12V。
默认为7.4V+表示舵机供电正极电压,供电电压为5.5V-8V。
默认为7.4-1.3V(即7.4V锂电池接一次降压快)注意以上如果不是默认电压。
主板的低压报警喇叭在电池电压过低的时候不会发生报警。
默认的供电连线如图所示。
3.PS2手柄连线、外接拨动开关的连线。
SECO 24 V DC 链式电动机操作手册说明书

SECO Ni 24 40Technical information and operating instructions09.22Application • 24 V DC Chain Motor. • E nvironmental and Smoke Ventilation applications • C onfigurable:• Speed • Stroke • Seal Relief• Volt Free Contact (optional) • R ange of Fixing Systems. • O ptions for customisation to meet application requirements. • Marked • T ested to principles of EN12101-2: 2003 Annex G1.1 General Safety InformationSE Controls reserves the right to introduce any modifications and improvements to the contents of this publication without the obligation of giving prior notice.Read and observe the information contained in these safety instructions and respect the order of procedure stated therein.Please keep these safety instructions for future reference and maintenance. Reliable operation and the prevention of damage and risks are only grantedif the equipment is assembled carefully and the settings are carried out according to these instructions and to the operating instructions of the drives.Please observe the exact terminal assignment, the minimum and maximum power ratings (see technical data) and the installation instructions.Please observe the following warning symbols:Warning!Carefully ready these warningsWarning!Draws attention to instructions that mustbe followed in order to prevent damage to the actuator.NoticeIndicates important notices to whichattention must be paid.Danger!General danger or precautionary warningwith numerous implications.Danger!Danger that could cause personal injury.Danger of hands been crushed!Warning!Danger of electric shock.1.2 Health and SafetyElectrical Safety; Warning 230 V AC Dangerousvoltage. Can cause death, serious injury orconsiderable material damage. Disconnect theequipment from the power supply at all polesbefore opening, assembling or carrying out anystructural alterations.Warning! Never connect the drives to 230V!They are built for 24V! Risk of death!Personal Protective Equipment; It isrecommended that suitable PPE is worn atall times during the installation and connection of actuator products in accordance with a recommended safe system of work.Handling and storage; Care must be taken in transportation to the installation location and during fitting. Actuator products must not be dropped, impacted, allowed to get wet or abused in any other way. Mishandling can result in serious damage. Competence; Installation and connection must only be carried out by authorised, competent and safety conscious persons.1.3 EnvironmentalAll actuator products contain metallic, plasticand electronic parts. Redundant electronicproducts are classified as hazardous wasteunder the WEEE regulations (Waste Electrical and Electronic Equipment). Electronic parts must be disposed by an authorised and licensed recycler.They must not be disposed of in ‘general waste’ skips. Consult SE Controls for assistance.1.4 Application and UseWhen using the actuator, follow these safetyinstructions described herein. This equipmentis designed for the automatic opening and closing of the stated types of windows.For further application, please contact SE Controls.The actuator compiles with current safety directives. Operating safety can be guaranteed only if installers comply with the safety regulations in force in the country where the actuator is used.Do not install two or more actuators on thesame window without using a synchronisationaccessory.Any other application of the actuator mustbe approved after technical testing of theapplication. Use only original accessories or accessories approved by SE Controls to install the actuator.The actuator is not a structural member of the window. Always mount the safety arms in bottom-hung applications. The position of the three-way switch button must be outside the field of action of the moving part of the window.Do not allow children to play with the fixed or remote controls.When opening or closing the window, makesure other people are far away from themoving part, even when a fire detection system is closing an open window.It would be beyond the scope of these safety instructions to list all the valid regulations and guidelines.Always make sure that your systemcorresponds to the valid regulations. Payparticular attention to: the aperture crosssection of the window, the opening time and opening speed, the temperature resistance of thecables and equipment, cross-sections of the cables in relation to the cable lengths and power consumption.Care must be taken to ensure that actuatorproducts are controlled with compatibleproducts; refer to SE Controls. No liability willbe accepted and no guarantee nor service is granted if actuator controls are used without such compatibility being confirmed.1.5 InstallationWarning! Incorrect installation may renderthe actuator dangerous! Follow all theinstructions set out below and theinstructions applied to the motor.Installation of this equipment must only be carried out by authorised, competent and safety conscious persons.The actuator must be assembled andconnected only by specialised staff who have been properly trained and who are familiar with the problems associated with automatic window opening and closing systems, technical reference standards and safety standards.The window closes automatically. Whenopening and closing, the drive unit is stoppedby the power cut- off. The correspondingpressure force is listed in the technical data.Take care - the pressure force is high enough tocause injury!During assembly and operation do not obstructthe window opening!Danger of crushing/trapping!Routing of cables and electrical connections only to be done by a qualified electrician.Power supply leads 230 V AC to be fusedseparately by the customer. Keep power supplyleads sheathed until the mains terminal.All low voltage cables (24 V DC) to beinstalled separately from high voltage cables.Flexible cables should not be plastered in.Provide strain relief for freely suspendedcables.The cables must be installed in such a way that they cannot be severed off, twisted or bent off during operation.Junction boxes must be accessible for maintenance work.Adhere to the type of cables, cable lengthsand cross- sections as stated in thetechnical information.After installation and any changes to the system check all functions by a trial run.1.6 MaintenanceAlways disconnect the motor’s supply voltage and batteries during cleaning or maintenance operations, especially if the actuator is equipped with an automatic control device.The system must be protected againstunintentional re-starting.All smoke ventilation systems must beperiodically (annually) checked, serviced,maintained and, if necessary, repaired and retested by a authorised, trained and competent,safety conscious persons.Maintenance shall be carried out in accordance with the requirements of;•Building regulations 2002•Health and Safety at Work Act 1974•I.E.E Regulations•Regulatory Reform (Fire Safety) Order 2005In order to keep the equipment in optimum operating condition it is recommended that ventilation systems are similarly maintained.There are no user repairable parts in this equipment.Basic checks that can be carried out include;•At least once a year, check that thepower cable and connection has not beendamaged and that it shows no sign of wear •Check that no object obstructs the windowmovement.•If faults arise, never work on the actuator andnever open or dismantle parts of the actuator thatdeny access to the inside of the mechanism.•If the actuator fails to function or is damaged,contact SE Controls.•Do not use the actuator until it has been repaired.A suitable service contract with SE Controls is recommended for this purpose.The gear system is greased for life and is maintenance free.Defective equipment must only berepaired by SE Controls. Only originalspare parts are to be used.After maintenance, repair or any changes to the system check all functions by a trial run.A. T op hung open out windowB. B ottom hungopen in windowC. T op hung openout window on sill3. Still fixing option 4 . F ace fixing option 5. Open inward option2. Trunnion set (installed on the moving part of the window)1. Body of chain actuatorInstallation GuideProduct ComponentsInstallation GuideA. T op hung open out window installationB. B ottom hung open in window installationi. Fix the trunnion set in the mid position on the moving part of the window.ii. Close the window, then fix the chain actuator body with the pivot bracket set (3) provided. It should be aligned with the trunnion set (2) on the moving part of the window. Caution: misalignment will cause improper opening and closing of the window. iii. Fix all screws in the trunnion set and pivot bracket firmly. (make sure sufficient space is allowed for the actuator bodyto rotate). iv. Fix the pin to connect the trunnion set to the top part of the chain.v. Switch on the power supply to test run the actuator for a few cycles, make sure the opening and closing of the window issmooth and free from obstruction. The installation process is similar to the above (Top hung window installation)Installation GuideC. T op hung open out window on sill installationi. Fix the trunnion set in the mid position on the moving part of the window using the holding bracket provided.ii. Close the window, then fix the chain actuator body with the pivot bracket set provided. It should be aligned with the trunnion set on the moving part of the window. Caution: misalignment will cause improper opening and closing of the window.iii. Fix all screws in the trunnion set and pivot bracket firmly. (make sure sufficient space is allowed for the actuator body to rotate).iv. Fix the pin to connect the trunnion set to the top part of the chain.v. Switch on the power supply to test run the actuator for a few cycles, make sure the opening and closing of the window is smooth and free from obstruction.vi. Repeat the above if adjustment is required.Setting the zero position of the actuator (For optimum performance and to maintain soft close feature, ensure zero point is correctly set)i. Fit actuator to vent as required, run motor fully open and then commence close of motor.ii. Position Zero Set Tool (ZST) as shown whilst actuator is closing. (See below)iii. Still holding ZST in place, allow vent to continue close stroke until it stops on current limit. ENSURE YOU DO NOT TRAP YOUR FINGERS.iv. New zero point is now set. Power and ZST can be removed.Zero position setting tool (FXS00500020)MagnetInstallation GuideConnectionDC 24 V version (2 wires)Cross section of flex is 0.75mmCreating a healthier & safer environmentLancaster House +44 (0)1543 443060Wellington CrescentFradley Park, Lichfield ********************Staffordshire WS13 8RZ Name & registered office: Loanguard Limited, Lancaster House, Wellington Crescent, Fradley Park, Lichfield, Staffordshire WS13 8RZ Company No.01468061 Vat No.377 5600 30 - SE Controls is a Registered Trademark。
QSC控制板以及上位机软件说明书

我们这里已QSC32E舵机板为例,讲解下舵机板上位机软件的使用:QSC16E操作基本上跟QSC32E类似,唯一不同的是QSC16E不带PS2解码QSC32E舵机控制器正面QSC32E舵机控制器背面QSC32E 舵机控制器说明图解QSC16E控制器QSC16E 舵机控制器说明图解1、安装驱动QSC32E使用MINI-USB线连接上舵机板找到以下的驱动然后打开QSC32控制器驱动程序文件夹,安装CP2102驱动根据不同的系统安装不同的CP2102驱动程序。
安装完驱动后,重启一次系统。
如安装成功USB附近的红色LED点亮。
如未成功安装。
红色LED不点亮。
QSC16E使用MINI-USB线连接上舵机板找到以下的驱动,这里可跳过安装然后打开驱动程序的相对应的WINXP/WIN7_QSC16控制器(PL2303)驱动文件夹WINXPWIN-7根据不同的系统安装驱动程序。
2、安装 Framewoks2.0,如果已经安装了或者有高版本的NetFramewoks 文件可跳过安装,如果没有安装这个文件则打不开上位机软件,如果能直接打开上位机软件则可不安装此文件。
WIN7或以上操作系统可无需安装。
3.上位机软件介绍说明左边为舵机图标操作窗口,打钩显示该舵机口、取消就关闭该舵机口右边为舵机图标位置保存窗口,舵机图标可自由拖拉,拖拉后保存位置舵机图标窗口,可自由拖拉如下人形的图标窗口,然后保存位置保存的位置一定要跟上位机软件QSC舵机控制器同一个目录下,以后才能从选择那里直接打开,保存到其他文件夹无效COM口选择端默认通讯速度为高速模式特殊情况下使用低速模式9600动作组调试运行窗口,上面是调试窗口下面是运行窗口初始化:上位机软件初始化,表示从开始地址256号位置开始写动作,只是对软件操作,而不改变已经下载到主板上的动作擦除:对下载到主板上的动作组做清空操作运行动作组:运行已经下载到主板上的动作组停止:停止运行动作组脱机动作组:运行已经下载到主板上的动作组并且下次开机直接执行该动作组禁用:禁用脱机动作组功能舵机口指示条也随意拖动B表示舵机偏差(默认为0),即舵机的相对位置范围为-100----100P表示舵机位置(默认为中位1500)范围为500-2500而导入动作组中的是绝对位置P0=B+P舵机位置速度状态数据显示,#表示几号舵机 P表示舵机的位置 T表示舵机运行到该位置的时间串口发送接收区输入代码点击发送按键即可调试好的舵机偏差值B 跟动作文件P 的保存操作窗口B跟P需要独立保存打开使用也需要独立操作不能用P的打开窗口打开B保存好的文件。
2010年代新版ERA24CNC操作手册
ERA-24CNC-3A 操作說明手冊安全上的注意安裝、運轉、保養、檢查前請務必詳讀本操作說明書及附屬資料,關於機器的知識、安全的資訊以及一切的注意事項都熟習之後,再正確使用。
本操作說明中,安全注意事項的等級可區分為「危險」、及「注意」。
因操作錯誤而發生危險情 時,可能導至死亡或重傷。
.因操作錯誤而發生危險情 時,可能導至中度傷害或輕傷,以及物件損壞。
在「注意」上所記載的事項,依情 也可能發生重大後果,所以無論如何,請一定要遵守以上兩者所記載的內容。
安全的使用方式 1.預防觸電注意事項2. 預防火災注意事項目錄 頁1. 規 格1.1 電氣 (7)1.2 油壓台(手臂座) (8)1.3 軸向定義 (8)2. 外部開關2.1 軸選擇 (10)2.2 寸動(CW+,CCW-) (10)3. 觸控螢幕3.1 主畫面 (10)3.2 手動模式……………………………………………………………………… 11~123.3 自動模式 (15)3.4切溝/邊刀參數設定…………………………………………………………… 16~183.5切溝2設定 (18)3.6邊刀設定(獨立邊刀) (19)3.7取放參數設定………………………………………………………20~223.8延遲時間………………………………………………………………………23~243.9定位測試……………………………………………………………24~253.10異常履歷 (26)鑽頭銑刀研磨機4. 簡易故障維護排除4.1 電源失效 (27)4.2 照明失效 (27)4.3 砂輪轉動無效 (27)4.4 切銷液流動無效 (27)4.5 螢幕切換無效... (28)4.6 自動啟動無效 (28)1.規 格1.1電氣電 源 開 關(主電源開關)(油壓及切銷液PUMP開關)主控制器 : 2∮220VAC伺服驅動器 : 3∮220VAC 60HZ 輸入電壓變頻器 : 3∮220VAC 60HZ電 流 15A主控制器名稱 Mitsubishi Motion Controller 控制方式 外部按鍵、觸控螢幕顯示方式 警告燈、觸控螢幕冷卻方式 油傳動方式 油壓、伺服馬達(控制單元電源啟動開關)(控制單元電源關閉開關)1.2 油壓台(手臂座)定義1.3 軸向定義2. 外部開關定義2.1 軸選擇電源啟動後,所有開關內的燈是不會亮的,直到有按任一軸鍵,此鍵內之燈才會亮起, 同時此軸已被選取,若要取消,再按一次原來的按鍵或按其他軸選擇鍵。
舵机控制板使用说明
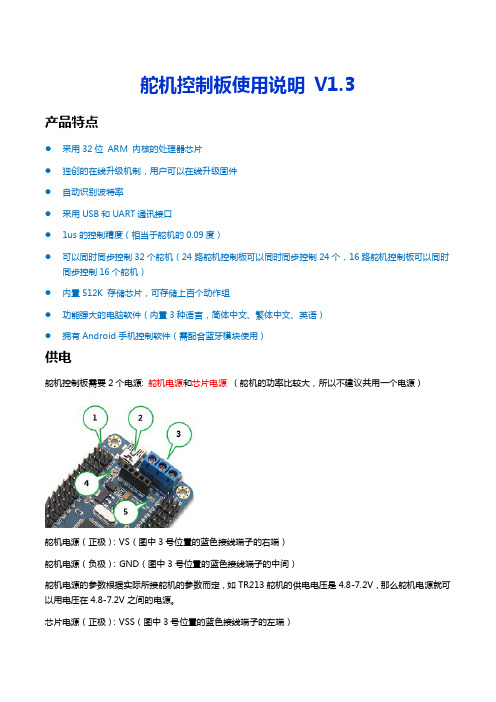
舵机控制板使用说明V1.3产品特点●采用32位ARM 内核的处理器芯片●独创的在线升级机制,用户可以在线升级固件●自动识别波特率●采用USB和UART通讯接口●1us的控制精度(相当于舵机的0.09度)●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时同步控制16个舵机)●内置512K 存储芯片,可存储上百个动作组●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语)●拥有Android手机控制软件(需配合蓝牙模块使用)供电舵机控制板需要2个电源: 舵机电源和芯片电源(舵机的功率比较大,所以不建议共用一个电源)舵机电源(正极):VS(图中3号位置的蓝色接线端子的右端)舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间)舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。
芯片电源(正极):VSS(图中3号位置的蓝色接线端子的左端)芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间)VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。
另外:1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。
2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必须是5V。
3. 1234. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表示芯片供电异常。
5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表示舵机供电异常。
2安装驱动驱动下载地址:/down/usc_driver.exe (全部是小写)直接双击usc_driver.exe ,点击下一步即可安装驱动。
(word完整版)Q-C使用说明书
Q2010-C控制器使用说明书一、设置使用方法:1、初始密码:出厂设置的编程密码为666882、进入编程状态:输入编程密码【66688】按【,#】此时红灯和黄灯亮,控制器进入编程状态。
进入编程状态后,如20秒内无操作将自动退出编程状态。
3、修改个人用户密码(无需在编程状态下)按【#】键“读相对应的卡”“【输入4位旧密码】【再输入4位新密码】”如操作正确,绿灯闪亮一次关闭,同时蜂鸣器长鸣一声。
注:缺省密码(1234)4、功能设置:必须在进入编程状态情况后设置才能生效,否则操作无效。
四、修改“编程密码”进入编程状态:按【1】【输入5位新密码】蜂鸣器短鸣一声,绿灯闪亮一次关闭,密码修改成功,按【0】退出编程状态。
五、修改或设置通用密码进入编程状态:按【2】输入(4位数通用密码)(如8888)蜂鸣器短鸣一声,绿灯闪亮一次消失,密码修改成功,按【0】退出编程状态六、设置用户卡片:①按卡号单张发卡:按【61】【#】“输入(前10位数字卡号或后8位数字卡号)【#】(可连续输入卡号按【#】键结束).注:前10位为ID卡上丝印的前段以0为首的10位数字,后8位为丝印在卡上后段带逗号的8位数字。
②按卡号批量发卡:按【62】【#】“输入(前10位数字卡号或后8位数字卡号)【#】,再输入要增加卡的张数(3位数)【#】”最多可一次连续发999张卡.发卡过程中控制器会发出嘀…嘀提示音,每一声响表示一张卡设置成功,全部设完蜂鸣器会发出嘀嘀两声响.(注:此项功能必须卡号为连号的卡片)。
③读卡发卡:按【63】【#】读要授权的卡,(可续读卡发卡)按【#】键结束。
④设置管理卡:按【64】【#】读要设置的卡片。
注意:新设置的管理卡将取代旧的管理卡,管理卡只有一张.管理卡是用来设置卡片或删除卡片用的。
⑤管理卡使用方式:a、读管理卡一次,则峰鸣器长鸣一声,按#键可以开锁。
b、连续读管理卡三次,立即移开管理卡,控制器长鸣三声则进入连续设置卡片状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
舵机板上位机软件使用说明参考QSC32E使用说明
这里详解ARDUINO-NANO配合舵机板QSC24E-NANO来解码PS2并使用手柄按键的功能,以及ARDUINO对舵机板接口通讯说明。
此功能仅QSC24E-NANO可用
此舵机板套件分别为3块PCB组成,最左边为24路带过载保护的舵机控制板,(专门处理多路舵机控制)。
中间为ARDUINO-NANO编程控制板,PRO-MINI 为编程控制主板(专门负责处理数据编程)使用,最右边为的串口调试板(可给舵机板调试也可给ARDUINO-NANO下载程序)。
此舵机板,他上面可直接插PS2手柄的接收器,其解码是通过ARDUINO-NANO 来完成的。
L1:舵机供电电源指示灯
L2:通讯指示灯,随着主板接收外部信号L2跟着同步闪动
L3:舵机板状态显示灯。
此舵机板带有电压检测功能,当VSS主板电压低于6.8V (默认为7.4V锂电池供电),或者舵机(+-)电压低于5.5V(默认为7.4V锂电池接入1.3V降压二极管),此时L3灭掉,并伴随喇叭报警。
提示电池电压不足用户需要给电池充电
1.驱动的安装:
插上CP2102串口设备的USB线,
并安装驱动,驱动为ARDUINO-QSC24E(CP2102)驱动
对应不同的操作系统选择不同的驱动文件安装,
这里注意,如果驱动没有安装时候CP2102串口设备的红色指示灯不会亮,只有正确安装好驱动后,CP2102串口板上的红色指示灯才点亮。
CP2102串口设备使用6P线连接下面的舵机板,连线为BLK---BLK,GRN---GRN.即通过上位机软件Q-robot_Servo_Control调试机器人舵机
CP2102串口设备使用6P线连接上面的ARDUINO编程板,连线为BLK---BLK,GRN---GRN.即通过编程软件软件arduino下载机器人主程序。
2.主板的供电
VSS表示主板供电正极电压,供电电压为6.5V-12V。
默认为7.4V
+表示舵机供电正极电压,供电电压为5.5V-8V。
默认为7.4-1.3V(即7.4V锂电池接一次降压快)
注意以上如果不是默认电压。
主板的低压报警喇叭在电池电压过低的时候不会发生报警。
默认的供电连线如图所示。
3.PS2手柄连线、外接拨动开关的连线。
这里是USB/NANO通讯切换跳线帽,拔掉右边的跳线帽,接入拨动开关的3P杜邦线,用于切换舵机板跟USB通讯或者舵机板跟ARDUINO-NANO通讯。
用USB通讯就是舵机板使用上位机软件Q-robot_Servo_Control来调试舵机板。
用NANO通讯就是使用ARDUINO-NANO来驱动舵机板。
(即ARDUINO-NANO 作为舵机板的二次开发的硬件上位机)
外接拨动开关跟舵机板的实物接线图
中间标注字符的TX 、RX为舵机板的TX、RX,如需其他单片机驱动舵机板可拔掉上面的两个跳线帽自行连接。
4.ARDUINO编译器使用
打开ARDUINO-0018的编译器
双击ARDUINO.EXE文件
打开ARDUINO之后选择TOOLS-BOARD
这里选择ARDUINO DUEMILANOVE OR NANO W/ATMEGA328
选这个这个芯片,芯片选择不对就无法下载程序
然后选择最新出来的COM口,如果确定不了是那个就重新插拔ARDUINO-NANO的USB线就能确定那个是最新出来的COM口并选择他。
如果选择不对就不能下载程序
然后选择打开文件图标
然后选择Q-ROBOT文件夹里面的PSX-ANALOG
导入PSX_ANALOG.pde文件
程序里面的内容在程序里面已经做了定义跟注解,这里不就再详细介绍了
然后点击下载按键
这个时候看到FTDIDE 两个黄灯一直闪烁,就是进入正常的下载,等待黄灯不闪了,就是程序下载完成,并显示如下DONE UPLOADING
就说明程序下载完成
然后拿出PS2无线手柄
打开串口查看,并弹出串口查看窗口,并选择波特率为115200
然后按下手柄的按键,我们这里以上下左右为列
按下上就是UP COM口就会发送按键代码
PRESSED UP 按下UP
DOWN UP 一直按住UP
RELESSED UP 就是松开UP
其他按键以此类推
DOWN 下LEFT 左LEFT 右
按下这些按键并发送相应的代码。
每个按键依然后三种模式按下按键发送一次松开按键发送一次还有按住按键一直发送
这个时候PS2手柄解码程序完成
如何驱动舵机板需要查看QSC舵机板及上位机软件说明书文档的高级控制部分
5:程序范例,比如按下圈圈
if (Psx.digital_buttons == psxO && CIRCLE==0) ///按一次圈圈
{ CIRCLE=1;
Serial.println("Pressed circle");//发送按下圈圈
Serial.println("#5 P1600 T500");//5号舵机用500MS的时间运行到P1600的位置
delay(500);// 延时500MS,以保证该舵机运行到指定位置
Serial.println("#5 P2500 T500");//5号舵机用500MS的时间运行到P2500的位置
delay(500);// 延时500MS,以保证该舵机运行到指定位置
//////////////////////////////5号舵机来回转动/////
Serial.println("#5P1000 #10P1000 #20P1000 T500")//5号、10号、20号舵机转到P1000位置
delay(500);//延时500MS,以保证该动作运行完成
Serial.println("#5P2000 #10P2000 #20P2000 T500")//5号、10号、20号舵机转到P2000位置
delay(500);//延时500MS,以保证该动作运行完成
/////////////////////////////////5.10.20号舵机来回转动/////
Serial.println("PL0 ");//先停止以前的所有动作组
Serial.println("PL0 SQ2 SM100 ONCE");//然后再以100%速度运行动作组2一次
delay(500);//延时500MS,以保证该动作组运行完成
////////////运行2号动作组一次
}
此后就需要根据自己的需要编写程序了
程序下载的时候无需切换拨动开关,如果需要用ARDUINO-NANO来驱动舵机板工作就需要切换外接拨动开关。
即使用ARDUINO-NANO跟舵机板通讯。