基于模糊控制的智能车寻迹算法研究
模糊系统控制算法在智能交通中的应用研究
模糊系统控制算法在智能交通中的应用研究智能交通系统是现代交通领域的重要研究方向之一,它的目标是通过运用先进的技术手段,提高道路交通的效率、安全性以及舒适度。
在智能交通系统中,模糊系统控制算法被广泛应用于交通流量控制、车辆动态优化、交通信号灯控制以及拥堵识别等方面,极大地改善了交通拥堵问题,并且提高了道路的通行效率。
模糊系统控制算法以模糊逻辑原理为基础,模拟人类的思维过程,通过数学模型来建立复杂的控制规则。
这种算法不仅在不确定性问题上表现出色,而且可以处理非线性系统,适应性较强。
在智能交通中,模糊系统控制算法常用于交通信号灯的控制。
传统的信号灯采用固定时长的控制方式,无法灵活应对不同道路的交通流量变化,往往导致交通拥堵问题严重。
而模糊系统控制算法可以根据当前交通状况,动态调整交通信号灯的时长,以实现最佳的交通流畅度。
在智能交通中,模糊系统控制算法还可以应用于车辆动态优化。
通过收集和分析车辆的动态数据,模糊系统可以根据当前车道的流量情况、车辆速度、车辆间距等因素,实时调整车辆的行驶策略,优化车流,避免交通事故和拥堵。
此外,模糊系统还可以通过预测车辆行驶路径,提前调整路况,减少交通事故的发生。
另外,模糊系统控制算法在智能交通中的应用还体现在交通拥堵识别方面。
通过采集路况图像、视频数据以及其他相关信息,模糊系统可以对道路上的交通拥堵情况进行实时分析,并提供相应的建议和措施,如引导车辆绕行、调整交通信号灯等。
这种智能的交通拥堵识别系统可以有效地缓解拥堵压力,提高道路通行效率,减少交通事故的发生。
除了上述应用,模糊系统控制算法在智能交通中还可以用于交通规划、智能驾驶等方面。
例如,模糊系统可以通过分析历史交通数据,预测未来的交通状况,帮助交通规划者制定合理的交通规划方案。
在智能驾驶方面,模糊系统可以根据路况、车辆行驶状态等信息,实现车辆的智能化控制,提高驾驶安全性和舒适度。
虽然模糊系统控制算法在智能交通领域有着广泛的应用前景,但仍存在一些挑战和问题需要解决。
基于模糊PID的自主寻迹小车控制
基于模糊PID的自主寻迹小车控制杨惠;高翔【摘要】Due to the different road conditions during the vehicle tracing process,the parameters of the mathematical model will change constantly,which make it difficult to set the global value for this parameters in traditional PID model.To solve the problem,fuzzy PID based control strategy is proposed.In the strategy,the values of three parameters are adjusted in real time according to the road condition,through the variation of the three parameter values.At the same time,the traditional PID and fuzzy PID are simulated by the simulation software.Atlast,simulated experiments based on Freescale model are carried out to verify accuracy as well as the superiority of fuzzy PID of the simulation results.%小车寻迹过程中由于路况不同,其数学模型的参数会不断地发生变化,这使得以往的传统PID全局参数的整定极为困难.因此提出了一种基于模糊PID的控制策略.通过模糊控制整定PID的3个参数的变化量,从而根据路况的不同,实现PID 三个参数的实时调节.同时应用仿真软件对系统的数学模型分别进行了传统PID和模糊PID的仿真.最后,在以飞思卡尔车模为基础的试验平台上进行模拟试验,验证了仿真结果和理论的准确性,以及模糊PID相比于传统PID的优越性.【期刊名称】《工业仪表与自动化装置》【年(卷),期】2017(000)004【总页数】6页(P92-96,100)【关键词】小车;模糊;自主寻迹;仿真【作者】杨惠;高翔【作者单位】兰州文理学院电子信息工程学院,兰州730000;兰州文理学院数字媒体学院,兰州730000【正文语种】中文【中图分类】TP391.9随着计算机技术、网络技术、通信技术的飞速发展,智能车在世界各国的研究不断深入[1]。
基于模糊逻辑的智能车辆控制技术研究
基于模糊逻辑的智能车辆控制技术研究近年来,随着智能化、自动化的发展,车辆智能化技术得到了广泛关注和应用。
在智能车辆控制技术中,模糊逻辑作为一种强大的工具,在处理复杂问题和提高智能化程度方面具有重要的应用价值。
本文将探讨基于模糊逻辑的智能车辆控制技术研究。
一、模糊逻辑介绍模糊逻辑是一种用来处理模糊信息的逻辑方法,是一种基于模糊概念的逻辑。
模糊逻辑研究的是不精确和不确定的信息,它不是二元思想的延伸,而是通过灵活的处理模糊信息,把事物之间的关系表示出来。
模糊逻辑具有可扩展性强、易于建模、计算量小等特点,是处理复杂问题的有效工具。
二、智能车辆控制技术智能车辆控制技术是一种通过植入感应器和计算机等智能设备,实现对车辆进行自主控制的技术。
通过智能化技术,车辆可以自动感知周围环境,通过内部算法进行决策和操作,从而实现驾驶员的部分或全部任务。
该技术可以大大提高车辆的安全性、路况适应性和驾驶舒适度,并在未来的出行方式中扮演着重要的角色。
三、基于模糊逻辑的智能车辆控制方法研究智能车辆控制过程中,模糊逻辑技术可以应用于对车辆行驶环境、车辆状态等信息进行模糊处理,并通过各种模糊控制算法进行计算和决策,从而实现车辆的智能化控制。
1、环境感知与模糊逻辑处理车辆智能化控制的基础是对周围环境的感知。
通过感应器、雷达、摄像头等设备对车辆行驶环境进行实时监测,并通过模糊控制算法进行模糊处理,在一定程度上提高车辆的精准性和适应性。
例如,对于车辆的自动驾驶功能,通过在车身周围安装众多感应器和摄像头,可以对车辆周围环境进行全面感知,并对路况进行模糊分类。
通过模糊分类可得出当前路况下的最佳行驶速度和方向,从而进行自动驾驶。
模糊处理技术可以灵活处理不同情况下的路况,保障车辆的安全行驶。
2、状态识别与模糊逻辑算法车辆的状态可以通过车辆内部的传感器进行监控,如发动机转速、油门状态、油耗等,在此基础上,通过模糊逻辑算法对车辆状态进行模糊处理,确定最佳的控制方式和调节参数。
基于模糊控制的自动驾驶汽车导航算法研究
基于模糊控制的自动驾驶汽车导航算法研究第一章概述随着科学技术的飞速发展,自动驾驶汽车正成为未来交通的重要发展方向。
汽车导航算法作为自动驾驶汽车的核心技术之一,越来越受到人们的关注和重视。
本文主要介绍基于模糊控制的自动驾驶汽车导航算法研究。
第二章模糊控制及其在自动驾驶汽车导航中的应用模糊控制是一种基于模糊逻辑的控制方法,可以处理一些非线性或具有不确定性的系统。
在自动驾驶汽车导航中,模糊控制可以用来处理车辆本身、环境和路况等因素对导航的影响。
以自动泊车为例,模糊控制可以根据车辆传感器所获得的车位信息、车速信息以及其他环境信息来确定泊车路径,进而控制车辆行驶。
第三章基于模糊控制的自动驾驶汽车导航算法基于模糊控制的自动驾驶汽车导航算法主要包括以下几个方面:1. 提取道路信息首先,通过车载相机等设备获取道路信息,如道路中心线、车道标线等。
2. 处理道路信息对获取的道路信息进行处理,如提取车道线,计算车道宽度、车道曲率等信息。
3. 生成所需导航信息利用处理后的道路信息,生成所需导航信息,如车辆应行驶的路径、车辆行驶速度等。
4. 控制车辆行驶根据生成的导航信息,使用模糊控制算法调整车辆的转向角度、速度等参数,保证车辆的行驶安全和效率。
第四章基于模糊控制的自动驾驶汽车导航算法实例以下是一种基于模糊控制的自动驾驶汽车导航算法实例:1. 提取道路信息通过车载相机获取道路信息,如车道线、隧道入口等。
2. 处理道路信息对获取的道路信息进行处理,如识别车道数、计算车道宽度、曲率半径等。
3. 生成所需导航信息根据处理后的道路信息,生成车辆应行驶的路径、速度等导航信息。
4. 控制车辆行驶根据生成的导航信息,利用模糊控制算法计算转向角度、速度等参数,保证车辆安全行驶。
如车辆行驶到隧道入口时,通过模糊控制算法调整车辆速度,保证行驶安全。
第五章总结基于模糊控制的自动驾驶汽车导航算法可以通过模糊逻辑处理复杂、非线性、不确定的系统,对自动驾驶汽车导航算法进行优化和提升。
模糊PID控制算法在智能小车中的研究与应用

模糊PID控制算法在智能小车中的研究与应用一、本文概述随着科技的快速发展和智能化水平的提高,智能小车在各个领域的应用越来越广泛,如无人驾驶、物流运输、环境监测等。
然而,智能小车的运动控制是一个复杂的问题,需要解决路径规划、避障、速度控制等多个方面的问题。
其中,速度控制是智能小车运动控制的核心问题之一。
传统的PID控制算法在速度控制方面有着广泛的应用,但由于其对于系统参数变化的敏感性,使得其在实际应用中往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制算法的智能小车速度控制方法,旨在提高智能小车的运动控制精度和稳定性。
本文首先对模糊PID控制算法的基本原理和特点进行了介绍,然后详细阐述了模糊PID控制算法在智能小车速度控制中的应用方法。
在此基础上,通过实验验证了模糊PID控制算法在智能小车速度控制中的有效性和优越性。
本文的研究工作不仅为智能小车的运动控制提供了一种新的方法,同时也为模糊PID控制算法在其他领域的应用提供了有益的参考。
接下来,本文将从模糊PID控制算法的基本原理、智能小车的运动控制模型、模糊PID控制算法在智能小车速度控制中的应用方法、实验结果与分析等方面展开详细的阐述。
二、模糊PID控制算法的基本原理模糊PID控制算法是一种结合了模糊逻辑和传统PID控制算法的控制策略。
该算法利用模糊逻辑处理PID控制中的非线性、不确定性和复杂性问题,从而提高了系统的鲁棒性和控制精度。
模糊逻辑是一种基于模糊集合和模糊推理的控制系统设计方法。
在模糊逻辑中,变量不再局限于具体的数值,而是可以在一定的范围内取任意值,这种变量被称为模糊变量。
模糊逻辑通过模糊集合和模糊运算,能够处理不确定性、非线性和不精确性等问题,使系统更加适应复杂环境。
PID控制算法是一种经典的闭环控制算法,由比例(P)、积分(I)和微分(D)三个部分组成。
PID控制器通过比较实际输出与期望输出的偏差,根据偏差的大小和方向,调整控制量以实现系统的稳定控制。
模糊算法在智能车控制中的应用
模糊算法在智能车控制中的应用随着科技的不断进步,智能车逐渐成为汽车行业的研究热点。
智能车具备通过传感器收集信息、分析信息并做出相应决策的能力,从而实现自主驾驶。
而智能车的控制算法中,模糊算法被广泛应用。
模糊算法是一种基于模糊逻辑的控制算法,它能够处理不确定性和模糊性信息。
模糊算法通过建立规则库、定义模糊集合和实现模糊推理来实现智能车的自主控制。
以下是模糊算法在智能车控制中的几个重要应用。
1.路径规划:智能车通过感应器获取周围环境信息,并使用模糊算法进行路径规划。
模糊算法可以根据不同的环境情况,如道路条件、车流量等,根据一系列规则,推断出最佳路径。
通过将车辆与感知环境进行模糊建模,模糊算法能够考虑诸多因素并生成适当的规划路径。
2.避障控制:智能车需要能够避开障碍物以确保行驶安全。
模糊算法可以根据传感器收集到的障碍物信息,以及车辆当前的速度、方向等状态,推断出避开障碍物的最佳行驶方式。
模糊算法可以将障碍物的距离、形状等模糊化,通过一系列模糊规则对避障行为进行控制。
3.车辆稳定性控制:在高速运动中,智能车需要保持稳定以确保驾驶安全。
模糊算法可以根据传感器收集到的车辆姿态、速度等信息,推断出调整车辆操纵的最佳方式。
通过模糊算法,可以将车辆的稳定性与多种因素进行模糊建模,从而实现智能车的稳定控制。
4.自适应巡航控制:自适应巡航控制是智能车中的一个重要功能,它能够根据前方车辆的速度、距离等信息,自动调整车辆的速度和跟驰距离。
模糊算法可以根据传感器收集到的信息,推断出最佳的巡航速度和距离。
通过模糊化车辆速度和距离等变量,并定义一系列模糊规则,模糊算法能够实现智能车的自适应巡航控制。
总结起来,模糊算法在智能车控制中的应用主要包括路径规划、避障控制、车辆稳定性控制和自适应巡航控制等方面。
这些应用使得智能车能够更好地适应复杂多变的道路和环境条件,提高了车辆的安全性和驾驶舒适性。
随着技术的不断进步和算法的不断优化,模糊算法在智能车控制中的应用前景将更加广阔。
模糊PID控制算法在智能小车中的研究与应用

模糊PID控制算法在智能小车中的研究与应用模糊PID控制算法在智能小车中的研究与应用摘要:智能小车是一种通过感知、决策和执行等功能实现自主导航的机器人系统。
在智能小车的控制系统中,PID控制算法通常被广泛应用于姿态控制和路径跟踪等方面。
然而,由于PID控制算法依赖于人工设定的参数,对于复杂的非线性系统来说,往往难以取得良好的控制效果。
模糊PID控制算法则结合了模糊逻辑控制和PID控制的特点,具有适应性强、鲁棒性好等优势,因此在智能小车中的研究与应用十分重要。
一、引言智能小车是人工智能领域的一个重要应用方向。
其核心任务是通过传感器收集环境信息,实现自主导航和路径规划,同时在运动过程中保持稳定姿态。
PID控制算法是一种经典的控制算法,在实际应用中具有高效简单的特点。
然而在某些情况下,传统PID控制的控制效果不理想。
因此,研究模糊PID控制算法在智能小车中的应用价值具有重要意义。
二、模糊PID控制算法原理模糊PID控制算法是将模糊逻辑控制与PID控制相结合的一种控制策略。
通过模糊化处理将传感器获取到的环境信息转化为模糊语言变量,然后根据模糊规则和模糊推理机制求取模糊输出,并通过去模糊化处理得到PID控制器的输出信号。
模糊PID控制算法利用了模糊规则的简单性和PID控制算法的高效性,提高了系统的自适应性和鲁棒性。
三、智能小车中的模糊PID控制算法应用在智能小车的控制系统中,模糊PID控制算法可以应用于姿态控制和路径跟踪等方面。
在姿态控制方面,智能小车需要通过控制电机或舵机等执行器,保持平稳的行驶姿态。
传统PID控制算法的参数设定较为困难,容易受到扰动的影响而失去稳定性。
而模糊PID控制算法通过根据模糊规则对车辆姿态进行调整,可以更好地适应不同工况下的姿态调节。
在路径跟踪方面,智能小车需要根据预先规划的路径,在实际行驶中进行修正。
传统PID控制算法容易受到路面不平和弯道等因素的干扰,导致车辆跟踪误差增大。
模糊算法在智能车辆导航中的应用与路径规划效果

模糊算法在智能车辆导航中的应用与路径规划效果智能车辆导航是当今研究的热点之一,如何实现高效准确的路径规划一直是该领域的核心问题之一。
而模糊算法作为一种常用的人工智能方法,被广泛应用于智能车辆导航系统中,以提高导航的精确度和智能化水平。
本文将探讨模糊算法在智能车辆导航中的应用,并讨论其路径规划效果。
一、模糊算法在智能车辆导航中的应用1.1 模糊集理论在位置感知中的应用在智能车辆导航系统中,准确地感知车辆当前的位置是路径规划的前提和基础。
而传统的定位方法在复杂环境下容易受到干扰,导致定位误差较大。
而利用模糊集理论,可以将车辆当前位置表示为多个可能位置的集合,通过模糊集合的运算来获取更精确的位置估计结果。
1.2 模糊逻辑在路况预测中的应用智能车辆导航系统需要准确地获取当前道路的交通状况,以便做出合理的路径规划。
模糊逻辑可以通过对历史车辆轨迹、实时流量等数据的分析,预测未来路况的变化趋势。
这样可以在路径规划过程中避开拥堵路段,提高行驶效率。
1.3 模糊控制在路径选择中的应用路径选择是智能车辆导航过程中的核心问题。
模糊控制方法可以根据用户设定的不同偏好和实时交通信息,给出最佳的路径选择。
通过将路径选择问题建模为模糊控制系统,考虑各个因素的权重和相互关系,可以得到更加合理的路径规划结果。
二、模糊算法在智能车辆导航中的路径规划效果2.1 路径规划准确度的提高传统的路径规划方法通常只考虑道路的长度或时间等单一因素,而模糊算法可以综合考虑多个因素,如行驶距离、交通状况、用户偏好等,以获得更加准确和合理的路径规划结果。
实验结果表明,基于模糊算法的智能车辆导航系统在路径规划准确度上具有明显的优势。
2.2 路径规划效率的提高模糊算法可以通过对历史路况数据的学习和预测,选择避开拥堵路段或高峰时段,以提高路径规划的效率。
与传统方法相比,模糊算法不仅考虑当前的路况,还能预测未来的变化趋势,从而避免了频繁的路径重新规划,减少了路径规划时间。
模糊PID控制算法在智能小车中的研究与应用
模糊PID控制算法在智能小车中的研究与应用智能小车是近年来智能化技术的一项重要应用,模糊PID控制算法作为一种自适应控制算法,被广泛应用于智能小车领域。
本文将从智能小车的研究背景入手,介绍模糊PID控制算法的原理和特点,以及在智能小车中的研究和应用,最后总结并展望未来研究的方向。
一、研究背景智能小车是一种能够自主运动、感知环境并做出决策的机器人,其运动控制是实现智能小车基本功能的核心。
传统的PID控制算法在许多自动控制系统中得到广泛应用,它通过不断地调整比例、积分和微分三个参数来实现系统的稳定控制。
然而,传统PID控制算法的主要问题是在非线性、时变或不确定性的系统中效果不佳。
为了解决这一问题,模糊PID控制算法被引入到智能小车的控制中。
模糊PID控制算法是基于模糊逻辑理论和PID控制理论的结合,通过对系统内外环境进行模糊化表示,将模糊规则集与PID控制算法相结合,从而提高了系统的稳定性和鲁棒性。
二、模糊PID控制算法原理和特点1.模糊化:将系统的输入和输出进行模糊化处理,将连续值转化为模糊变量。
2.模糊规则库构建:根据系统的特性和经验知识,构建一组模糊规则。
3.模糊推理:根据当前的系统输入和模糊规则库,进行模糊推理,得到模糊输出。
4.解模糊化:将模糊输出转化为真实的控制量。
5.输出:将解模糊化得到的控制量输出给被控对象,实现控制。
1.对系统非线性和时变性具有较好的适应性,能够应对实际环境中的各种变化和干扰。
2.理论基础扎实,可以通过专家知识和经验知识来构建模糊规则库,适用于复杂系统。
3.可以处理模糊和不确定性信息,提高了控制系统的稳定性和鲁棒性。
智能小车作为一种自主决策和行动能力的机器人,其控制系统对稳定性要求较高。
模糊PID控制算法在智能小车中得到了广泛的研究和应用。
首先,模糊PID控制算法可以用于智能小车的路径规划和避障。
通过感知环境中的障碍物和目标点,将其模糊化处理,构建模糊规则库,实现智能小车的自主导航和避障功能。
基于模糊控制的快速循迹智能车的设计与实现
王挺 , 麦范金, 郑安兵. 基于极坐标、 栅格和模糊方法的路径规划[ J] . 微计算机信息, 2008, 2( 2) : 219- 220. 孙增圻. 智能控制理论与技术 [ M] . 北京 : 清华大学出版社, 2000.
Design and implementation of fast tracking intelligent vehicle based on fuzzy control
第 23 卷第 6 期 2008 年 12 月
成 都 信 息 工 程 学 院 学 报 JOU R NA L OF CHEN G DU U N IVER SITY OF INFOR M AT ION TECHN OLO GY
Vol. 23 No. 6 D ec. 2008
文章编号 : 1671 -1742( 2008) 06 -0601 -04
测试路径 使 用 一 个 有 30 弯 角 的 路 径, 当 偏 离 中 心 误 差 出 现 时 在 每 一 个 控 制 周 期 内 把 误 差 写 入 M C9S12DB128B 单片机内部 的 E2 P ROM 中 , 当偏 离中心 误差 满足要 求后停 止写入。小车 跑完路 径后, 读出 E 2 PROM 中的误差数据得到不同控制方案下的实际控制效果图, 如图 5 所示。
收稿日期 : 2008 -04 -28
602
成
都
信
息
工
程
学
院
学
报
第 23 卷
流高达 5A, 输入的脉宽调制频率可以高达 10kHz。 2. 3 电机测速模块的设计 电机测速采用电机带动遮光盘 , 遮光盘遮挡来遮挡光电开关 , 产生和速度相对应的周期脉冲信号。选用欧姆 龙带比较器的光电开关 EE - SX671, 输出周期的方波, 它的上限频率 1kHz 是完全可以满足电机转速的要求。 2. 4 路径检测模块的设计 路径检测模块采用线阵 CCD 检测一条垂直于路径的黑线信息, 选用 1024 线的线阵 CCD 芯片 PD3575D[ 2] 。 驱动 PD3575D 需要 4 路脉冲, 分别为转移栅时钟、 IO 、 复位时钟 RO 、 采样保持时钟 SH O 和传输门时 钟 T G。驱动 CCD 的关键工作是如何产生以上的 4 路波形。图 2 是这 4 路时序波形图。 利用外围电路产生一个基准频率, 然后通过 74 系列 计 数器 和 与 非 门 等产 生 IO 、 SHO 、 RO 信 号。 CPU 只需通过与非门控制 IO 信号和给出 T G( 帧起 始信号 ) 。这些可以利用 CPU 定时器中断来完成, 因 而能够提高 CPU 的效率。 通过对输出信号的实际测量, 发现它实际是一个 直流信号叠加一 个峰峰值为几 百毫伏的交流信 号。 处理方法是 : 首先通过一个隔直电容, 滤除掉其中的 直流分量 , 再通过一个用高速运放构成的带偏置的反
模糊pid控制算法在智能小车中的研究与应用
模糊pid控制算法在智能小车中的研究与应用
模糊PID控制算法是将模糊逻辑与PID控制相结合的一种控
制方法。
它通过模糊逻辑的模糊化、规则库的设计和模糊推理来根据系统的误差和误差变化率计算出控制器的输出值,从而实现对系统的控制。
在智能小车中,模糊PID控制算法可以应用于车辆的导航和
轨迹跟踪。
智能小车通常需要根据环境中的实时信息进行路径规划和避障,模糊PID控制算法可以根据车辆与目标点之间
的距离、偏离角度以及偏离角度的变化率等信息,计算出车辆的理想速度和转向角度,使其能够精确地跟随目标路径,避免碰撞和偏离轨道。
模糊PID控制算法的研究主要包括模糊化方法、规则库设计
和模糊推理算法等方面。
模糊化方法主要是将系统输入和输出的连续信号转化为模糊集合,常用的方法包括三角隶属函数、高斯隶属函数等。
规则库的设计是模糊PID控制算法的核心,需要根据系统的特点和需求,定义一系列的模糊规则来实现控制目标。
模糊推理算法是根据当前的系统状态和规则库中的模糊规则,通过模糊推理机制计算出控制器的输出值。
模糊PID控制算法在智能小车中的应用可以有效地提高车辆
的自主导航和轨迹跟踪能力,使其能够适应不同的环境和复杂的路况。
同时,模糊PID控制算法具有较好的鲁棒性和适应性,能够处理系统的非线性和不确定性,对于复杂的控制问题有很好的应用前景。
基于模糊控制的自动驾驶车辆研究

基于模糊控制的自动驾驶车辆研究随着科技的不断发展,自动驾驶汽车成为当前汽车制造业界的热门话题。
人工智能、深度学习等技术的应用,让智能汽车的概念变得越来越具有可行性。
基于模糊控制的自动驾驶汽车技术,正在被广泛研究和应用。
一、什么是模糊控制模糊控制是一种智能控制方法。
它不同于传统的确定性控制方法,它能够对不确定的,难以定义的系统进行控制。
传统方法在控制系统中的变量都是明确的,可以通过精确的算法来规划和操作。
然而,当存在大量的模糊变量和非线性系统时,传统的控制方法就无法奏效。
模糊控制方法可以将不确定的因素进行模糊化的处理,将不同的控制变量的关系建立在一种模糊的逻辑中。
模糊控制的核心就是建立一个控制规则库,通过控制规则库中的一些规则,来控制系统的输出。
模糊控制系统可以适应不同的环境和不确定的因素,提高智能控制的水平。
二、模糊控制在自动驾驶汽车中的应用模糊控制在自动驾驶汽车技术中的主要应用是在路径规划和障碍物检测上。
路径规划是自动驾驶汽车中最基础的技术。
传统的路径规划方法在处理不同的环境和场景时面临很大的挑战。
而模糊控制在路径规划上可以更好地适应各种不确定因素,如路况、天气、交通等等。
模糊控制可以根据实时的交通状况和车辆的动态变化,进行路径规划和控制。
障碍物检测是自动驾驶汽车路线规划中另一个非常重要的技术。
通过传感器的数据采集和处理,自动驾驶汽车可以识别变化的物体和其他车辆,实现避让和汽车控制。
模糊控制在障碍物检测上可以有效地增加汽车的智能程度,根据各个传感器的数据信息,来判断汽车的方向和控制策略。
三、模糊控制技术的优缺点模糊控制在自动驾驶汽车技术中具有很多的优点。
首先,模糊控制可以充分利用传感器收集到的数据信息,避免因数据缺失和噪声造成的控制误差。
其次,因为模糊控制的控制规则库确定在模糊域中,所以可以更好地应对复杂的环境和不确定的因素。
最后,由于模糊控制方法可以具有适应性和灵活性,因此可以随着系统的变化而进行调整和优化。
模糊算法在智能车控制中的应用

模糊算法在智能车控制中的应用1. 应用背景随着人工智能和自动驾驶技术的不断发展,智能车成为了未来交通领域的重要研究方向。
在智能车控制中,模糊算法作为一种基于模糊逻辑的控制方法,被广泛应用于路径规划、障碍物避免、车辆稳定性控制等方面。
模糊算法通过将输入变量和输出变量进行模糊化处理,以便于处理非精确和不确定的信息,从而实现智能车的高效、安全、稳定地运行。
2. 应用过程2.1 模糊化输入在智能车控制中,通常会使用多个传感器来获取环境信息,如摄像头、激光雷达等。
这些传感器会提供一系列输入变量,如距离、速度、角度等。
首先需要对这些输入变量进行模糊化处理,将其转换为模糊集合。
以距离为例,可以将距离分为近、中、远三个模糊集合。
根据实际情况和需求设定每个模糊集合的隶属度函数,如近模糊集合的隶属度函数可以设定为三角形,中模糊集合的隶属度函数可以设定为梯形等。
2.2 模糊化规则智能车控制中,需要事先定义一系列规则,用于根据输入变量的模糊集合来推断输出变量的模糊集合。
这些规则通常采用“如果…那么…”的形式,如“如果距离近且速度快,则刹车力度大”。
这些规则可以由专家知识提供,也可以通过数据挖掘等方法从大量实验数据中学习得到。
规则的数量和质量对系统性能有很大影响。
2.3 模糊推理在得到输入变量的模糊集合和模糊化规则后,就可以进行模糊推理了。
模糊推理是通过将输入变量的模糊集合与规则进行匹配,并根据匹配结果计算输出变量的模糊集合。
常见的推理方法有最小最大法、加权平均法等。
最小最大法将每个规则与输入变量的模糊集合进行交运算,得到一个临时结果。
然后将所有临时结果取最大值,并将其作为输出变量的模糊集合。
2.4 解模糊化输出在得到输出变量的模糊集合后,需要将其转换为具体的控制命令。
这个过程称为解模糊化。
解模糊化通过计算输出变量的平均值、重心等方法,将模糊集合映射到具体的控制命令上。
例如,对于刹车力度这个输出变量,可以根据输出变量的模糊集合计算其平均值,并将平均值作为刹车力度的实际值。
模糊算法在智能车联网中的应用与车辆定位精度评估
模糊算法在智能车联网中的应用与车辆定位精度评估智能车联网是一个利用互联网等现代信息技术对汽车进行全方位、多层次、高效率的信息化管理和服务,以提高行车安全、行车舒适、行车友好的智能化系统。
而其中车辆定位是智能车联网中的一个重要环节,是实现准确导航、实时监控以及高效管理的关键。
模糊算法正是在智能车联网中发挥了巨大的作用,为车辆定位的精度评估和提升提供了一种有效的手段。
一、智能车联网中车辆定位技术的基本原理智能车联网中车辆定位主要分为GPS定位和非GPS定位两种方式。
其中,GPS定位是通过卫星向车辆发送定位信号,然后接收车辆返回的信号来确定车辆的位置。
而非GPS定位则需要通过其他方式来获取车辆的位置信息,如利用地面基站、RFID(Radio Frequency Identification Radio频率识别)标签等。
无论是GPS定位还是非GPS定位,在定位过程中均会受到复杂的环境干扰。
例如,在高层建筑密布、山地峡谷等地形复杂的地区,GPS 定位会受到多径传播、信噪比等问题的干扰,导致定位误差较大;在室内场景,GPS定位则存在无信号覆盖的情况。
因此需要结合其他技术对车辆的位置进行精确确定。
二、模糊算法在车辆定位中的应用模糊算法是一种特殊的数学定量分析方法,它能够将模糊的概念转化为数学表达形式,从而进行计算和分析。
在车辆定位中,由于环境等各种因素的影响,车辆真实位置往往会存在模糊不清的情况。
模糊算法可以对车辆位置信息进行模糊处理,从而提高车辆定位的精度和准确性。
以模糊C均值算法(FCM)为例,FCM将一个模糊集合映射到另一个模糊集合中,通过对模糊集合进行聚类分析,得到车辆的大致位置。
在得到初始估计位置之后,再采用其他算法对该位置进行修正,最终达到对车辆位置的精确确定。
三、车辆定位精度评估方法车辆定位的精度评估是对车辆定位技术的一种定量评价,可以有效地衡量车辆定位的准确性和稳定性。
常用的车辆定位精度评估方法有两种:绝对误差法和相对误差法。
基于模糊控制的智能小车轨迹跟踪控制

控制输入作用下,对于任意误差状态,qe 有界
。
图 4 模糊控制器的一般结构
本文针对小车的线速度 v 和角速度 ω 分别设计了模糊控 制器。模糊控制器 1 以小车横向位姿误差 ye 及其变化率 作 为输入,输出的是智能小车的横向角速度 ω;模糊控制器 2 以小车前方路径的曲率 C 为输入,输出智能小车的期望线速 度 V。曲率可通过 α1 和 α2 计算得到。
10.16638/ki.1671-7988.2019.23.014
基于模糊控制的智能小车轨迹跟踪控制
张传正,纪旭彬,张丙哲
(长安大学汽车学院,陕西 西安 710064)
摘 要:文章针对一种非完整移动智能小车,以离散轨迹点的方式构建智能小车的预期运动轨迹,并运用模糊控制 理论实现智能小车的轨迹跟踪控制,最后利用 Matlab 软件进行仿真验证。 关键词:智能小车;模糊控制;轨迹跟踪 中图分类号:U461.99 文献标识码:B 文章编号:1671-7988(2019)23-38-03
(5)
角度偏差 dθ 为车体当前位置和下一位置的连线与车体 当前速度方向的夹角。
(6) α1 和 α2 分别是直线 NiNi+1 和 Ni+1Ni+2 直线 Ni+1Ni+2 和
图 6 横向偏差 ye 的隶属函数
图 7 横向偏差变化率 的隶属函数
图 8 角速度 ω 的隶属函数
39
表 1 模糊控制器 1 的模糊控制规则
Ni+2Ni+3 的夹角。曲率 C 可由 α1 和 α2 来确定,智能小车应根 据轨迹曲率的大小进行平稳转弯。
图 2 位姿坐标误差模型 智能小车的非完整约束条件:
智能小车在目标位姿处的期望状态为 误差方程为:
基于模糊控制的智能车辆路径规划研究

基于模糊控制的智能车辆路径规划研究随着人工智能技术的不断发展,智能车辆也成为了一个备受瞩目的领域。
在智能车辆的开发中,路径规划是一个至关重要的环节。
基于模糊控制的智能车辆路径规划技术,能够更好地应对复杂道路环境,实现车辆自主导航。
本文将从以下几个方面探讨基于模糊控制的智能车辆路径规划研究。
一、基于模糊控制的智能车辆路径规划原理基于模糊控制的智能车辆路径规划主要通过使用模糊控制算法,根据车辆当前位置和预设的目标位置,计算出最佳路径和行驶方向。
该算法的原理是将车辆所处的道路环境按照一定规则分成若干个区域,然后根据这些区域之间的距离和路况条件等信息,建立数学模型,最终得出车辆的最优行驶方案。
二、基于模糊控制的智能车辆路径规划的优点相较于传统的路径规划方法,基于模糊控制的智能车辆路径规划具有以下优点:1. 对于复杂道路环境有较好的适应性。
模糊控制算法能够通过灵活的参数调节,更好地应对道路环境的变化,适应各种复杂道路情况,为车辆行驶提供更准确的指导信息。
2. 精度较高。
模糊控制算法较传统方法更容易捕捉到道路中的微小变化,能够使车辆的路径规划更为准确。
3. 稳定性较高。
基于模糊控制的智能车辆路径规划算法具有较好的稳定性,能够避免急转弯等问题,为车辆行驶提供更为稳定的保障。
三、基于模糊控制的智能车辆路径规划的应用场景基于模糊控制的智能车辆路径规划技术适用于各种路况情况,尤其是在以下几个场景中有较好的应用效果:1. 多车辆协同行驶。
在多车道及二车道道路上,车辆不仅要注意自身行驶路径,在分道、超车时还需与其他车辆保持安全距离,此时基于模糊控制的智能车辆路径规划技术能更好地保证行车安全。
2. 市区和城市道路。
市区及城市道路往往比较复杂,交通状况也比较拥堵,采用基于模糊控制的智能车辆路径规划技术,可以更好地适应红绿灯、左转限制等复杂交通环境。
3. 高速公路和高速公路出口。
基于模糊控制的智能车辆路径规划技术,在高速公路和高速公路出口处,能够更好地指导车辆的行驶路径,保证车辆的高速行驶安全。
自适应模糊逻辑控制下的无人驾驶车辆轨迹跟踪
自适应模糊逻辑控制下的无人驾驶车辆轨迹跟踪自适应模糊逻辑控制下的无人驾驶车辆轨迹跟踪一、引言无人驾驶车辆技术是当今交通领域的研究热点,它有望带来更高效、安全和便捷的交通方式。
轨迹跟踪是无人驾驶车辆的关键任务之一,旨在使车辆能够准确地跟随预设的路径。
自适应模糊逻辑控制作为一种智能控制方法,在无人驾驶车辆轨迹跟踪中具有重要的应用前景。
二、无人驾驶车辆轨迹跟踪概述1. 轨迹跟踪的重要性轨迹跟踪对于无人驾驶车辆至关重要。
准确的轨迹跟踪可以确保车辆在道路上行驶时遵循预定的路线,避免与其他车辆或障碍物发生碰撞。
它是实现无人驾驶车辆安全、高效运行的基础。
2. 传统轨迹跟踪方法及其局限性传统的轨迹跟踪方法包括基于模型的控制方法和基于传感器的反馈控制方法等。
基于模型的控制方法依赖于精确的车辆动力学模型,但在实际应用中,车辆模型往往存在不确定性。
基于传感器的反馈控制方法虽然可以实时获取车辆周围的环境信息,但对于复杂的路况和动态变化的环境,其控制效果可能受到限制。
三、自适应模糊逻辑控制原理1. 模糊逻辑基础模糊逻辑是一种处理不确定性和模糊性问题的数学工具。
它通过定义模糊集合和模糊规则来描述系统的行为。
在无人驾驶车辆轨迹跟踪中,模糊逻辑可以用来处理车辆动力学模型的不确定性和环境的模糊性。
2. 自适应机制自适应模糊逻辑控制通过自适应机制不断调整模糊规则和参数,以适应车辆动力学模型的变化和环境的不确定性。
自适应机制可以根据车辆的实时状态和环境信息,自动调整模糊控制器的输出,提高轨迹跟踪的精度和稳定性。
四、自适应模糊逻辑控制在无人驾驶车辆轨迹跟踪中的应用1. 车辆动力学模型的建立在应用自适应模糊逻辑控制进行轨迹跟踪时,首先需要建立车辆动力学模型。
车辆动力学模型描述了车辆的运动状态和受力情况,是设计模糊控制器的基础。
2. 模糊控制器的设计根据车辆动力学模型和轨迹跟踪的要求,设计模糊控制器。
模糊控制器包括模糊化、模糊推理和去模糊化三个环节。
基于模糊自适应PID的智能车辆路径跟踪控制
基于模糊自适应PID的智能车辆路径跟踪控制作者:肖灵芝王家恩来源:《专用汽车》 2011年第2期合肥工业大学机械与汽车工程学院安徽合肥 230009摘要:选取车辆当前位姿和参考位姿来构造车辆的动态位姿误差,建立车辆路径跟踪闭环控制系统的Simulink仿真模型,并设计了模糊自适应PID控制器,利用模糊推理的方法,对PID控制器的参数进行自动调整。
利用常规PID和模糊自适应PID控制算法分别进行仿真实验。
仿真结果表明,模糊自适应PID改善了控制器的动态性能且具有较好的自适应能力。
关键词:智能车辆模糊自适应PID 路径跟踪常规PID1 引言智能车辆作为智能交通运输系统中的重要组成部分已经成为研究热点。
智能车辆在运行过程中由控制系统感知和检测道路信息,并作出控制决策控制车辆的执行机构以实现自动驾驶,所以控制系统是决定智能车辆整体性能好坏的关键。
学者们针对智能车辆的控制系统展开了深入的研究,随着模糊控制、神经网络等智能控制理论的发展,这些先进的控制技术也逐渐被应用于智能车辆控制系统上,本文将常规PID与模糊控制思想相结合用一种模糊自适应PID控制方法实现了智能车辆的路径跟踪,并相应地给出了仿真结果。
2 车辆位姿误差模型对智能车辆,其运动学方程为[1]式中,(x,y)为车辆的位置,为车辆的方向角,即前进方向与X轴的夹角; V、ω 分别为车辆的线速度和横摆角速度。
如图1所示,在某一时刻,车辆质心在全局大地坐标系中的位置坐标为(x ,y ),车辆纵轴线与横坐标的夹角为θ 。
在全局大地c c c坐标系中,设车辆前方道路上某一参考点O 坐标为(x ,y ), 其切r r rθrs线方向与横坐标的夹角为。
现将全局坐标系中的跟踪误差转化为车辆局部坐标系中的跟踪误差,根据图中的几何关系可推导出在车辆局部坐标系中跟踪参考点的误差如下[2]。
图1 车辆坐标系转换式中, x , y ,θ 为模糊自适应PID控制器的输入变量。
基于模糊控制的汽车路径跟踪研究

f (t) = b
t ∈ t3 (3)
h0 + h1 t + h2 t2 + h3 t3
t ∈ t4
0
t ∈ t5
g0 = e0 gi = ei uj ( j = 1 ,2 ,3)
h0 = e′0
hi = e′i uj ( j = 1 ,2 ,3)
2 .2 蛇形线道路输入模型
蛇形线试验道路模型尺寸如图 4 所示 。
· 2533 ·
中国机械工程第 25 卷第 18 期 2014 年 9 月下半月
图 4 蛇形线试验道路模型图
图 4 中实际道路各段尺寸参数为 :s0 = L = 2 u ;5 L = 10 u ;s = 3 u 。 标杆宽度 B = 2畅 46 m (宽度 自定义 ,文中的宽度主要是根据当时做试验的车 型所设计的标柱宽度来定的) 。
Nωr
Nβ 0 NΦ
C = Y ωr - mu Y β 0 Y Φ
ms hu
0 Lp L Φ
其中 :
0
010
N = [Nδ /i Y δ /i 0 0]T
Nωr = - 2(kf a2 + kr b2 )/u Nβ = 2 ( - akf + bkr )
N Φ = 2(akf Ef - bkr Er )
a3 = s1 + s2 + s3 + s4
d = a1 - a0
d′ = a2 - a3
汽车的纵向位移可由 x = u t 求得 ,故式 (2)
中 f (x ) 函数可以转变为时间 t 的函数 f (t) ,具体 表达式为
0
t ∈ t1
g0 + g1 t + g2 t2 + g3 t3
t ∈ t2
图 2 双移线试验道路模型图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于模糊控制的智能车寻迹算法研究摘要:与传统的自动控制相比,模糊控制不用建立在被控对象准确的数学模型的基础上。
这一特点在非常适用于实际运用中影响因素很多、结构十分复杂系统。
其系统有易于接受,设计简单,维护方便,而且比常规控制系统稳定性好,鲁棒性高等特点。
因其与本设计实际条件相似,所以选其做智能小车的寻迹算法研究。
关键词智能小车;模糊控制;寻迹算法ABSTRACT Compared with the traditional automatic control,fuzzy control without based on a accurate mathematical model of controlled object. This feature is suitable for the systems which have many influencing factors and a very complex structure in the practical application. There are many feature in this system:such as easy to accept, the design is simple, convenient maintenance, more stability and robustness than conventional control system,and so on. Because it is similar to the actual conditions of our design, so we choose it for the smart car tracing algorithm.KEY WORDS smart car;fuzzy control;tracing algorithm目录1.前言 (1)2.硬件设计 (3)2.1整体结构 (3)2.2传感部分 (4)2.2.1 原理 (4)2.2.2 电路设计 (4)2.2.3 传感器感应板布局 (4)2.2.4 闸门感应器 (5)2.3控制部分 (5)2.4驱动部分 (6)2.4.1 电机驱动 (6)2.4.2 舵机驱动 (6)3. 程序设计部分 (7)3.1模糊控制原理 (7)3.2智能车模糊逻辑控制器 (7)3.2.1 编码 (8)3.2.2 模糊化 (8)3.2.3 模糊规则库 (9)3.2.4 模糊判决 (9)3.3模糊控制器实现 (10)4.结论 (11)致谢 (11)参考文献 (12)1.前言本题目来源于瑞萨超级MCU模型车大赛。
瑞萨超级MCU模型车大赛主要是设计智能控制程序,根据感应器以及测速器反馈的信号(通过前方的反射式红外光电传感器检测到黑色跑道上白线路径),然后通过智能程序的判断与控制,使智能小车能在特定赛道(直道、S道、交叉道、上下坡、变线区等轨道)上高速行驶为目的的比赛。
其中涉及的技术主要有传感器技术、单片机设计技术和控制算法。
MCU模型车大赛是参赛选手要求在搭载有瑞萨MCU主板上的模型车上自行设计并编入独立的控制程序,拼装制作成自动驾驶车参加竞技,胜负是根据顺利跑完全程比赛的时间长短来判定的。
纵观一下现时的智能控制算法,如PI、PD、PID、模糊、神经网络算法等,再根据该赛事车子感应及跑道的情况,提出用模糊算法进行车子的寻迹控制,希望能研究出较好的寻迹算法。
努力寻求小车性能最优(检测准确、行驶平稳、速度快、抗干扰强等)。
模糊逻辑控制 (Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。
1965年,美国的L.A.Zadeh创立了模糊集合论;1973年他给出了模糊逻辑控制的定义和相关的定理。
1974年,英国的E.H.Mamdani首先用模糊控制语句组成模糊控制器,并把它应用于锅炉和蒸汽机的控制,在实验室获得成功。
这一开拓性的工作标志着模糊控制论的诞生。
模糊控制实质上是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。
其典型应用的例子涉及生产和生活的许多方面,例如在家用电器设备中有模糊洗衣机、空调、微波炉、吸尘器、照相机和摄录机等;在工业控制领域中有水净化处理、发酵过程、化学反应釜、水泥窑炉等的模糊控制;在专用系统和其它方面有地铁靠站停车、汽车驾驶、电梯、自动扶梯、蒸汽引擎以及机器人的模糊控制等。
近年来,研究模糊算法在智能寻迹小车上应用的课题渐渐增加,但大多数都是静态传感,即传感器安装在车体上,并不会随方向改变而发生变化。
本设计就是研究另一种基于动态传感器的智能寻迹小车的设计。
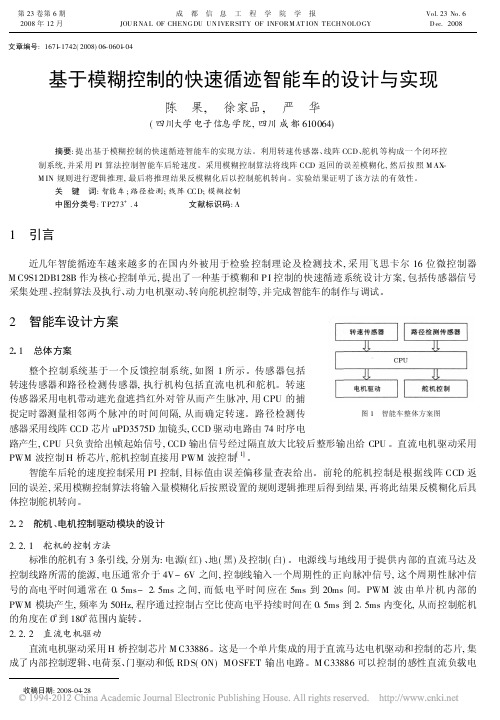
2.硬件设计2.1 整体结构本智能小车包括三大部分:传感部分、控制部分和驱动部分。
传感部分有传感器感应板、传感器子处理板和闸门感觉器三个模块;控制部分的CPU板使用的是H8-3048单片机;驱动部分的电机驱动析集成了控制电路、驱动电路和电源电路。
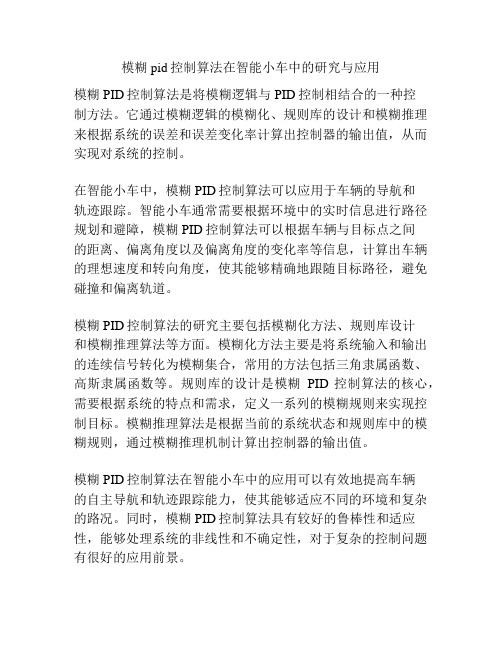
如图2.1,图2.2:图2.1 智能小车整体结构模块图图2.2 智能小车整体结构实物图2.2 传感部分2.2.1 原理根据跑道的实际情况(黑色跑道白线路径),我们采用了较为简单的红外光电感应器。
其原理是:红外线照射到白色的路径上时,白色不吸光而发生反射,从而感应器接收到光信号,继而转变为电信号(低电平,LED点亮);而照射到黑色跑道上时,黑色吸光,感应器接收不到信号,从而转变为电信号(高电平,LED熄灭)。
图2.3 红外感应器原理图图2.4 红外感应器电路原理图2.2.2电路设计电路原理如图2.4:2.2.3传感器感应板布局传感器的布置方案有单排、双排、W字形排列等。
我们采用了单排一字形的排列方式。
具体的布置方式如图2.5,图2.6,也就是在车模的头部安装一块电路板,其底部安装8个传感器。
图2.5 红外感应器布局框架图图2.6 红外感应器布局实物图2.2.4闸门感应器闸门感应器也是采用红外传感器,原理同上,布局如图2.7,图2.8。
图2.5 闸门感应器布局框架图图2.6 闸门感应器布局实物图2.3 控制部分日本的瑞萨H8-3048单片机拥有128KROM和4KRAM,11个IO端口(1~B),5个ITU(整型定时器)等较为丰富的资源。
2.4 驱动部分驱动部分主要驱动的是两路电机和一路舵机,均使用PWM来控制。
PWM( Pulse Width Modulation),又称脉冲宽度调制方式,是指通过改变输入脉冲的有效工作时间,改变输入平均电压的调节电机转速方式。
PWM信号的有效工作时间和周期的比值为PWM信号的占空比a为:a= to/Tout—PWM一个周期内高低电平中有效电平时间,T—PWM周期式中:a—占空比值,toout2.4.1 电机驱动硬件驱动设计是基于H桥的电路(如图2.7),控速则采用PMW控制电流来调整速度。
图2.7 H桥原理图2.4.2 舵机驱动舵机采用PWM脉冲控制,通过调整脉冲的占空比实现舵机的左转和右转,如图2.8所示。
图2.7 舵机控制原理图3. 程序设计部分3.1 模糊控制原理模糊控制(Fuzzy Control)是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它从行为上模仿人的模糊推理和决策过程。
该方法首先将操作人员或专家经验编成模糊规则,然后将来自传感器的实时信号模糊化,将模糊化后的信号作为模糊规则的输入,完成模糊推理,将推理后得到的输出量加到执行器上。
实现模糊控制算法的过为:单片机采样得到被控制量的精确值,然后将此量与给定值比较得到误差信号E;把误差信号E的精确题壁进行模糊化变成模糊量,误差E的模糊量可用相应的模糊语言表示。
至此,得到了误差的模糊语言集合的一个子集e(e实际是一个模糊相量)。
再有e和模糊控制规则R(模糊关系)根据推理的合成规则进行模糊决策,得到模糊控制量u,即u =e。
R式中:u为一个模糊量。
为了给被控对象施加精确的控制,还需进行解模糊处理。
在得到控制量后,经数模转变为精确的模拟量送给执行机构,对被控对象进行一步控制。
之后,中断等待第2次采样,进行第2步控制。
这样循环下去,就实现了被控对象漠糊控制。
3.2 智能车模糊逻辑控制器模糊控制器(Fuzzy Controller,FC)也称为模糊逻辑控制器(Fuzzy Logic Controller,FLC),由于所用的模糊控制是由模糊理论中模糊条件语句来描述的,因此,模糊控制器是一种语言型控制器,故也称为模糊语言控制器(Fuzzy Language Controller,FLC)。
模糊控制器主要由3个功能模块组成,即模糊化模块、和模糊判决模块,如图3.1所示。
图3.1 模糊逻辑控制器结构图3.2.1 编码位置偏差e及其变化率ec是模糊控制器的2个输入,其中:ec=e i-e i-1。
模糊控制器需对这2个精确量进行编码,使其成为模糊量,进而参加模糊推理。
智能车上使用了8个光电管,其编码表如表3.1所示。
表3.1 轨迹位置编码表变化量。
考虑到实际情况,设偏差e的基本论域为[-7,7],偏差变化ec的基本论域为[-3,3],控制量的基本论域为[-40,40],均划分为7个等级,即{-3,-2,-1,0,1,2,3 }则偏差e的量化因子= 7/3=2.33Ke偏差变化ec的量化因子=3/3=1Kec控制量u的比例因子=40/3=13.33Ku模糊集取7个语言值,分别为{负大,负中,负小,0,正小,正中,正大}即{NB,NM,NS,ZO,PS,PM,PB}上文中:U为速度和方向控制量的变化量。
3.2.2 模糊化由于传感器所检测到的信号都是精确量,但模糊控制器中需要的却是模糊量,所以需要将这些精确量转变成语言变量值,即模糊量。
在模糊控制中,通常将控制量的实际值与期望值比较,得到一个偏差e,并将其模糊化处理为模糊量E,控制器根据E来决定如何对系统加以调节控制。
为了使控制器的性能更好,通常还需要将偏差变化量EC作为输人量,以此对系统进行综合判断 。
根据从实际调试中得到的经验,可以将偏差e 、偏差变化ec 和控制量变化u 映射到模糊域中,如表3.2。
表3.2 偏差变化e 划分表3.2.3 模糊规则库在智能车控制系统中,模糊控制器的输入量为位置偏差E 及其相对行驶距离的变化量EC ,输出量为速度和方向的控制量 ,所以该模糊控制器为一个双输入单输出的模糊控制器,其控制规则通常采用以下模糊条件语句,即If E and EC then U其中: 为输入系统偏差变量e 模糊化的模糊集合;EC 为输入系统偏差△e 模糊化的模糊集合;U 为输出变量 的模糊集合 。