sinc插值和NUFFT小结
数值分析论文 ――几种插值方法的比较课程论文8(学院+专业+学号)
数值分析论文——几种插值方法的比较1.插值法概述插值法是函数逼近的重要方法之一,有着广泛的应用 。
在生产和实验中,函数或者其表达式不便于计算复杂或者无表达式而只有函数在给定点的函()x f 数值(或其导数值) ,此时我们希望建立一个简单的而便于计算的函数,使()x ϕ其近似的代替,有很多种插值法,其中以拉格朗日(Lagrange)插值和牛顿()x f (Newton)插值为代表的多项式插值最有特点,常用的插值还有Hermite 插值,分段插值和样条插值.这里主要介绍拉格朗日(Lagrange)插值和牛顿(Newton)插值和埃尔米特插值(Hermite 插值)。
2.插值方法的比较2.1拉格朗日插值2.1.1基本原理构造次多项式,这是n ()()()()()x l y x l y x l y x l y x P n n k nk k n +⋅⋅⋅++==∑=11000不超过次的多项式,其中基函数:n()x l k =)...()()...()(()...()()...()(()1110)1110n k k k k k k k n k k x x x x x x x x x x x x x x x x x x x x ----------+-+-显然满足 =()x l k ()i k x l ⎩⎨⎧≠=)(0)(1k i k i 此时,误差()()x f x P n ≈()()()=-=x P x f x R n n (x))!1()(1)1(+++n n n f ωξ其中∈且依赖于,.ξ()b a ,x ()()()()n n x x x x x x x -⋅⋅⋅--=+101ω很显然,当,插值节点只有两个,时1=n k x 1+k x ()()()x l y x l y x P k k k k i 11+++=其中基函数 = , =()x l k 11++--k k k x x x x ()x l k 1+kk kx x x x --+12.1.2优缺点可对插值函数选择多种不同的函数类型,由于代数多项式具有简单和一些良好的特性,故常选用代数多项式作为插值函数。
sinx牛顿插值法拟合
sinx牛顿插值法拟合牛顿插值法是一种用于拟合实验数据的插值方法。
假设已知一组数据点(x0, y0), (x1, y1), ..., (xn, yn),要求通过这些数据点拟合出一个函数f(x),使得f(xi)≈yi。
牛顿插值法的基本思想是利用差商的概念来表示插值多项式。
通过不断递推计算差商,可以得到一个n次插值多项式。
n次插值多项式的一般形式为:f(x) = f(x0) + (x-x0)f[x0, x1] + (x-x0)(x-x1)f[x0, x1, x2] + ... + (x-x0)(x-x1)...(x-xn-1)f[x0, x1, ..., xn]其中,f[x0, x1, ..., xi]表示 xi 和 x0, x1, ..., xi-1 所对应的差商。
差商的计算可以通过递推公式来进行,如下所示:f[xi] = yif[x0, x1] = (f[x1] - f[x0]) / (x1 - x0)f[x1, x2] = (f[x2] - f[x1]) / (x2 - x1)...f[x0, x1, ..., xn] = (f[x1, x2, ..., xn] - f[x0, x1, ..., xn-1]) / (xn - x0)通过递推计算差商,可以得到插值多项式f(x),将插值多项式带入函数计算x的值来逼近y。
在使用牛顿插值法拟合sin(x)函数时,首先需要选取一组适当的数据点,然后按照上述方法进行插值计算,最后可以得到一个拟合sin(x)函数的多项式。
需要注意的是,牛顿插值法只适用于有限区间的数据插值。
对于sin(x)函数来说,它是一个周期函数,所以在选择数据点时,通常会选取一个小的区间来进行拟合,然后通过函数的周期性来进行扩展。
同时,为了提高拟合的准确性,通常会选取适量的数据点,使得数据点的分布均匀。
计算方法数值积分_插值型积分

计算方法数值积分_插值型积分
一.概述
插值型积分是数值积分的一项重要方法,它是将要计算的曲面上的积分点根据插值函数或其中一种样条函数,插值成一条直线之后再求解。
插值型积分主要有牛顿-拉夫逊插值内插法、Chebyshev插值内插法、余弦和正弦插值内插法和Hermite插值内插法等,主要用来解决二元函数、多项式、函数的积分。
同时,插值型积分可以用来求解非常复杂的不可积函数,也可以用于求解紧密的积分,可以节省一定的计算时间。
二、牛顿-拉夫逊插值内插法
牛顿-拉夫逊插值内插法是插值型积分中最常用的方法,它通过在给定的多项式基函数上拟合曲线,计算曲线上积分点的函数值,然后把它们拟合到牛顿-拉夫逊插值函数中,最后将插值函数作为定积分的函数,通过求解插值函数的积分来解决问题。
牛顿-拉夫逊插值内插法一般采用牛顿-拉夫逊插值函数,它是基于多项式的函数,由节点上的函数值和其导数值建立插值函数,其积分也可以由插值函数和它的导数求解。
牛顿-拉夫逊插值函数具有以下特点:
1.多项式阶数不受限;
2.插值函数结果是一条曲线;
3.可以非常精确地表示复杂的函数;。
牛顿插值法原理及应用汇总

牛顿插值法插值法是利用函数f (x)在某区间中若干点的函数值,作出适当的特定函数,在这些点上取已知值,在区间的其他点上用这特定函数的值作为函数f (x)的近似值。
如果这特定函数是多项式,就称它为插值多项式。
当插值节点增减时全部插值基函数均要随之变化,这在实际计算中很不方便。
为了克服这一缺点,提出了牛顿插值。
牛顿插值通过求各阶差商,递推得到的一个公式:f(x)=f[x0]+f[x0,x1](x-x0)+f[x0,x1,x2](x-x0)(x-x1)+...f[x0,...xn](x-x0 )...(x-xn-1)+Rn(x)。
插值函数插值函数的概念及相关性质[1]定义:设连续函数y-f(x) 在区间[a,b]上有定义,已知在n+1个互异的点x0,x1,…xn上取值分别为y0,y1,…yn (设a≤ x1≤x2……≤xn≤b)。
若在函数类中存在以简单函数P(x) ,使得P(xi)=yi,则称P(x) 为f(x)的插值函数.称x1,x2,…xn 为插值节点,称[a,b]为插值区间。
定理:n次代数插值问题的解存在且唯一。
牛顿插值法C程序程序框图#include<stdio.h>void main(){float x[11],y[11][11],xx,temp,newton;int i,j,n;printf("Newton插值:\n请输入要运算的值:x=");scanf("%f",&xx);printf("请输入插值的次数(n<11):n=");scanf("%d",&n);printf("请输入%d组值:\n",n+1);for(i=0;i<n+1;i++){ printf("x%d=",i);scanf("%f",&x[i]);printf("y%d=",i);scanf("%f",&y[0][i]);}for(i=1;i<n+1;i++)for(j=i;j<n+1;j++){ if(i>1)y[i][j]=(y[i-1][j]-y[i-1][j-1])/(x[j]-x[j-i]);elsey[i][j]=(y[i-1][j]-y[i-1][j-1])/(x[j]-x[j-1]);printf("%f\n",y[i][i]);}temp=1;newton=y[0][0];for(i=1;i<n+1;i++){ temp=temp*(xx-x[i-1]);newton=newton+y[i][i]*temp;}printf("求得的结果为:N(%.4f)=%9f\n",xx,newton);牛顿插值法Matlab程序function f = Newton(x,y,x0)syms t;if(length(x) == length(y))n = length(x);c(1:n) = 0.0;elsedisp('x和y的维数不相等!');return;endf = y(1);y1 = 0;l = 1;for(i=1:n-1)for(j=i+1:n)y1(j) = (y(j)-y(i))/(x(j)-x(i));endc(i) = y1(i+1);l = l*(t-x(i));f = f + c(i)*l;simplify(f);y = y1;if(i==n-1)if(nargin == 3)f = subs(f,'t',x0);elsef = collect(f); %将插值多项式展开f = vpa(f, 6);endend牛顿插值法摘要:值法利用函数f (x)在某区间中若干点的函数值,作出适当的特定函数,在这些点上取已知值,在区间的其他点上用这特定函数的值作为函数f (x)的近似值。
sinc函数拟合数据

sinc函数拟合数据
Sinc函数是一种常见的数学函数,通常用于信号处理和插值技术中。
如果你想使用sinc函数来拟合数据,你需要考虑一些因素。
首先,sinc函数通常表示为sin(x)/x,其中x是自变量。
这意味着sinc函数在x=0处的值为1,并且在其他位置上通过正弦函数的振铃形式衰减。
因此,如果你的数据在接近零的位置有明显的振铃特征,sinc函数可能是一个合适的拟合模型。
然而,需要注意的是,sinc函数在无穷远处衰减非常缓慢,这意味着它可能不适合拟合快速衰减的数据。
另外,sinc函数在频域中有无限宽的主瓣和多个次瓣,这可能导致在拟合过程中出现过拟合的问题,特别是在高频部分。
在实际应用中,你可能需要考虑使用多项式拟合、高斯函数或者其他适合你数据特征的函数来进行拟合。
此外,你还可以尝试使用非参数方法,如样条插值或局部回归来拟合数据,这些方法可以更灵活地适应数据的特征。
最后,无论你选择什么样的拟合方法,都需要进行适当的模型
验证和误差分析,以确保你选择的模型是合适的,并且能够准确地描述你的数据特征。
综上所述,使用sinc函数来拟合数据需要考虑数据的特征、sinc函数的性质以及其他拟合方法的优劣,以及进行适当的模型验证和误差分析。
希望这些信息能够帮助你更好地理解如何使用sinc 函数来拟合数据。
拉格朗日插值法总结

拉格朗日插值法总结拉格朗日插值法2008-05-12 16:44一、问题的背景在实际问题中常遇到这样的函数y=f(x),其在某个区间[a,b]上是存在的。
但是,通过观察或测量或试验只能得到在区间[a,b]上有限个离散点x0,x1,…,xn上的函数值yi=f(xi),(i=0,1,…,n)。
或者f(x)的函数f(x)表达式是已知的,但却很复杂而不便于计算;希望用一个既能反映函数f(x)的特性,又便于计算的简单函数来描述它。
二、插值问题的数学提法:已知函数在n+1个点x0,x1,…,xn上的函数值yi=f(xi),(i=0,1,…,n)求一个简单函数y=P(x),使其满足:P(xi)=yi,(i=0,1,…,n)。
即要求该简单函数的曲线要经过y=f(x)上已知的这个n+1个点:(x0,y0),(x1,y1),…,(xn,yn),同时在其它x∈[a,b]上要估计误差:R(x)=f(x)-P(x)其中P(x)为f(x)的插值函数,x0,x1,…,xn称为插值节点,包含插值节点的区间[a,b]称为插值区间,求插值函数P(x)的方法称为插值法。
若P(x)是次数不超过n的代数多项式,就称P(x)为插值多项式,相应的插值法称为多项式插值。
若P(x)是分段的多项式,就是分段插值。
若P(x)是三角多项式,就称三角插值。
三、插值方法面临的几个问题第一个问题:根据实际问题选择恰当的函数类。
本章我们选择代数多项式类,其原因有两个:(1)代数多项式类简单;微分、积分运算易于实行;(2)根据著名的Weierstrass逼近定理,任何连续的函数都可以用代数多项式作任意精确的逼近。
第二个问题:构造插值函数P(x),使其满足:P(xi)=yi,(i=0,1,…,n)与此相关的问题是:插值问题是否可解(存在性的问题),如果有解,是否唯一?(唯一性的问题)第三个问题:插值误差R(x)=f(x)-P(x)的估计问题。
与此相关的问题是插值过程的收敛性的问题。
三角函数插值
三角函数插值三角函数插值是指通过已知数据点的函数值来估算其它数据点的函数值,利用三角函数的周期性和实现高阶连续性来达成目标。
三角函数插值是一种特殊的插值方法,它适用于数据点分布在周期间隔的情形。
一、三角函数插值方法的原理三角函数插值是基于三角函数的周期性,将已知数据点的函数值表示为三角函数的线性组合,进而利用三角函数的周期性,估算其它数据点的函数值。
二、三角函数插值的适用条件三角函数插值适用于数据点分布在周期间隔的情形。
三、三角函数插值的举例例如,对于数据点集合{x0,x1,x2},它们均分周期后,可记为{-π,-π/3,π/3}。
假设我们已知这些点的函数值{y0,y1,y2},想要估算在周期内其他点的函数值{y3}。
我们可以通过以下三角函数插值公式进行计算:y3 = (A+Bsin(x)+Ccos(x))其中,A、B、C为待求系数,x为插值点坐标。
根据三角函数插值公式,我们需要这些待求系数。
以A为例,我们可通过观察公式推得:A=1/3(y0+y1+y2)同理,我们也可以得到B、C的求法。
用求得的系数代入三角函数插值公式,就能通过已知数据点的函数值估算出其他数据点的函数值。
四、三角函数插值的优点1. 三角函数插值充分利用三角函数的周期性,从而能够更加准确地估算函数值。
2. 三角函数插值兼顾了高阶连续性和周期性,使得估算结果更加平滑。
3. 三角函数插值对于周期分布的数据点,能够有效地实现函数值的逼近。
五、三角函数插值的注意事项1. 当估算的点落在两个数据点的中间时,三角函数插值会出现震荡现象,此时需要采用平均值的方法来避免。
2. 在使用三角函数插值进行数据估算时,需要考虑噪声的影响,因为噪声会导致函数值的失真。
3. 三角函数插值方法对于周期的要求较高,如果数据点不能满足周期要求,则无法使用此方法进行插值。
六、总结三角函数插值是一种通过已知数据点的函数值来估算其它数据点的函数值的方法,它适用于数据点分布在周期间隔的情形。
插值型求积公式及其之间的比较
摘要在实际应用中,常常会遇到积分制的计算,插值法是常见的求积分方法.牛顿-柯特斯与高斯型求积公式是两种不同的插值法.前者是等距节点下的求积公式,后者是非等距节点下的积分公式.牛顿-柯特斯求积公式是计算低阶积分的方法,而高斯型求积公式是计算高阶积分的方法.梯形求积公式,辛普森求积公式,柯特斯求积公式是最简单的牛顿-柯特斯求积公式.公式的导出及其分类,余项,代数精度,收敛性与稳定性,及其几何意义,这些都是本课题重点介绍的内容.而高斯型求积公式中主要介绍常用的高斯型求积公式,不同的区间,不同的权函数导致高斯点和高斯系数的不同,从而形成不同的公式,其中重点讲解了高斯-勒让德求积公式.关键词余项;梯形求积公式;辛普森求积公式;流程图;代数精度目录引言 (1)第一章牛顿-柯特斯公式 (2)§1.1 牛顿-柯特斯公式的相关概念 (2)§1.2 N-C公式 (4)§1.2.1 公式的导出 (4)§1.2.2 梯形求积公式 (5)§1.2.3 辛普森求积公式 (5)§1.2.4 柯特斯求积公式 (7)第二章高斯型求积公式 (10)§2.1 高斯型求积公式的有关定义 (10)§2.2 利用正交多项式构造高斯求积公式 (12)§2.3 高斯-勒让德公式的详细总结 (13)§2.4 插值型求积公式之间的比较 (11)参考文献 (16)附录A (17)附录B (18)附录C (19)引言在工程上的实际计算中想利用求原函数的方法来求定积分常会遇到困难.这是因为工程上的被积函数)f有时比较复杂,求原函数十分困难或者根本找不到可用初(x等函数表示的原函数,有时我们甚至还无法知道被积函数)f的解析表达式,而只知(x道一组对应的离散数据.因此就要利用计算机进行数值计算,以确定定积分的值,这就是数值积分.数值积分最有效的算法是插值型求积公式.插值型求积公式分为两类,一类是等距节点下的求积公式;另一类是非等距节点下的求积公式.前者包括梯形求积公式,普森求积公式,柯特斯求积公式;后者包括高斯型求积公式.插值理论是解决数值计算定积分的有效途径之一.梯形求积公式对所有次数不超过1 的多项式是准确成立的;辛普森求积公式对所有次数不超过3 的多项式是准确成立的;柯特斯求积公式对所有次数不超过 5 多项式是准确成立的.此牛顿-柯特斯求积公式在求积系数不为负数时是数值稳定的.由于龙格现象存在,不难得知,牛顿-柯特斯求积公式不一定具有收敛性.稳定性和收敛性可知,数值计算中应主张使用低阶的牛顿-柯特斯求积公式.而高斯型求积公式是最高代数精度的插值型求积公式.使用高斯型求算例中积分,数值实验结果要体现出随高斯点的增加误差的变化.本课题最要介绍插值型求积公式的区别,即等距节点下牛顿-柯特斯公式与非等距节点下的高斯型求积公式的比较,包括余项,代数精度的比较,收敛性与稳定性的对比.第一章介绍牛顿-柯特斯的相关知识,而第二章介绍高斯型求积公式的有关知识.第三章详细讲述等距节点下的公式与非等距公式的比较.第一章 牛顿-柯特斯公式借助插值函数来构造的求积公式称为插值型求积公式.一般选用不同的插值公式就可以得到不同的插值型求积公式.本章主要介绍等距节点下的插值型求积公式,即低阶N C -公式.低阶N C -公式是很有代表性的插值型求积公式.公式的导出,余项的计算,代数精度的证明都将是本章要求掌握的知识.§1.1 牛顿-柯特斯公式的相关概念定义1.1 依据积分中值定理,()()()ba f x dxb a f ξ=-⎰,就是说,低为b a -而高为ξ的矩形面积恰恰等于所求曲边梯形的面积.取[,]a b 内若干个节点k x 处的高度()k f x ,通过加权平均的方法射年工程平均高度()f ξ,这类求积公式称机械求积公式()()nbk k ak f x dx A f x =≈∑⎰式中k x 称为求积节点,k A 称为求积系数.定义1.2 由插值理论可知,任意函数()f x 给定一组节点01n a x x x b =<<<= 后,可用一n 次多项式()n P x 对其插值,即()()()n n f x P x R x =+,因此()()()bb bn n aaaf x dx P x dx R x dx =+⎰⎰⎰.当()n P x 为拉格朗日插值多项式时,即0()()()nn k k k P x l x f x ==∑,则(1)111()()()()()(1)!(())()[]()[]n nbb bkkaaak nb k k n ak nk k n k f f x dx l x f x dx x dxn l x dx f x R f A f x R f ξω+====++=+=+∑⎰⎰⎰∑⎰∑其中011011()()()()()()()()()bb k k n k k a ak k k k k k n x x x x x x x x A l x dx dxx x x x x x x x -+-+----==----⎰⎰(1)()[]()(1)!n bn af R f x dx n ξω+=+⎰通常称为插值型求积公式.定义 1.3 如果求积公式对于次数不超过m 的多项式均能准确成立.但对于1m +的多项式不能准确成立,则称该公式具有m 次代数精度说明:)a 若机械求积公式的代数精度0,m ≥则有0ni i A b a ==-∑.)b 若机械求积公式的代数精度为m ,即当()1,,,m f x x x = 时有()()nbi i ai f x dx A f x ==∑⎰则对任意次数不超过m 的k 次多项式(),k P x k m ≤有()()nbk i k i ai P x dx A P x ==∑⎰)c 代数精度的高低,从一侧面反应求积公式的精度高低.定义1.4 在求积公式0()()nbk k ak f x dx A f x =≈∑⎰中,若00lim ()()nbk k an k h A f x f x dx →∞=→=∑⎰其中11max()i i i nh x x -≤≤=-,则称求积公式是收敛的.定义1.5对任给0ξ>,若0,δ∃>只要|()|(0,1,,),k k f x f k n δ-≤=就有|()|nnk k k k k k A f x A f ξ==-≤∑∑则称求积公式是稳定的.注:由于计算()k f x 可能有误差,实际得到k f ,即.()k k k f x f δ=+§1.2 N-C 公式§1.2.1 公式的导出设区间[,]a b n 等分,步长b ah n-=,取等分点k x 够造出的插值型求积公式(其中,0,1,,k x a kh k n =+= )()0()()nn n k k k I b a C f x ==-∑称作n 阶牛顿-柯特斯公式. 其中()n k C 为柯特斯系数()00(1)()*!()!i kn kn n n ki Ct i dt n k n k ≠-=-=--∏⎰ ()011011000()()()()()()()()()()((1))((1))()((1))((1))()()(1)()*!()!i kbn k k abk k n ak k k k k k n x a thnn k nni b a C l x dxx x x x x x x x dxx x x x x x x x t t k t k t n b adt k k k k k k n nb a t i dtn k n k ≠-+-+=+-=-=----=-------+--=---+---=--⎰⎰⎰∏⎰表1-1 柯特斯公式的系数n ()n k C1 12 12 2 16 23 16 3183838 184 790 1645 215 1645 790 5 19288 2596 25144 25144 2596 19288 6 41840 945 9280 34105 9280 935 41840 7 75117280 357717280 132317280 298917280 298917280 132317280 357717280 75117280 898928350 588828350 92828350- 1049628350 454028350- 1049628350 92828350- 588828350 98928350§1.2.2 梯形求积公式当1n =时,由表1-1柯特斯系数表第一行知11(1)(1)010011(1),22C t dt C tdt =--===⎰⎰故得梯形公式()[()()]2b a b a T f x dx f a f b -==+⎰.梯形公式的余项3''()()()12b a R f f η-=-梯形公式的几何意义是用一条过两点的直线近似代替被积函数的曲线,从而用一个梯形的面积来近似代替一个曲边梯形的面积.xy0A B y=P(x)y=f(x)f 0f 1x 0=ax 1=b图1.1 梯形公式的几何意义梯形求积公式分类及其截断误差见表1-1 流程图如下所示:图1.2 梯形公式流程图表1-2 梯形求积公式分类及其截断误差名称公式 余项 代数精度左矩形 2()()()()()2b ab a f x dx b a f a f η-'=-+⎰ 2()()2f R b a η'=- 代数精度为 0 右矩形 2()()()()()2b a b a f x dx b a f b f η-'=-+⎰ 2()()2f R b a η'=-代数精度0 中矩形3()()()()()224b a b a b a f x dx b a f f η--''=-+⎰3()()24f R b a η''=- 代数精度 1 §1.2.3辛普森求积公式当2n =时,由表1-1柯特斯系数表第二行知(2)(2)(2)02114,.66C C C ===故得辛普森公式输入a 和b计算步长h=b-aT=(h/2)[f(a)+f(b)]输出T定义函数f(x)[()4()()]62b a a bS f a f f b -+=++. 辛普森求积公式的几何意义是用一条过三点的抛物线近似代替被积函数的曲线,从而用一个二次抛物线所围成的容易计算的曲边梯形面积来近似代替原来的曲边梯形的面积.xyx 0x 2x 1y=P (x )y=f (x )图1.3 辛普森求积公式的几何意义辛普森求积公式余项及其代数精度见表1-2 流程图如下:图1.4 辛普森求积公式流程图表1-3 辛普森求积公式余项及其代数精度名称公式余项 代数精度输入a 和b计算步长h=b-aS=(h/6)[F(a)+4f(a+h/2)+f(b)]输出结果S定义函数f(x)辛普森求积公式[()4()()]62b a a b S f a f f b -+=++ 5(4)()()2880S b a R f η-=- 代数精度是3 §1.2.4柯特斯求积公式当3n =时,由表1-1柯特斯系数表第三行知(4)(4)(4)(4)(4)0413273212,,.909090C C C C C =====故得柯特斯求积公式33[7()32()12()32()7()]90424b a a b a b a b C f a f f f f b -+++=++++柯特斯求积公式余项及其代数精度见表1-3 流程图如下所示:图1.5 柯特斯求积公式的流程图表1-4 柯特斯求积公式余项及其代数精度名称 公式余项代数精度 柯特斯求积公式3[7()32()12()9042332()7()]4b a a b a b C f a f f a b f f b -++=+++++ 6(6)()()1935360C b a R f η-=- 代数精度是5 例1.1 分别用梯形求积公式,辛普森求积公式,柯特斯求积公式计算积分12041dx x +⎰输入a 和b计算步长h=b-aC=(h/90)[7f(a)+32f(a+h/4)+12f(a+h/2)+32f(a+3h/4)+7f(b)]输出结果C定义函数f(x)由:1()[()()](42)322ba b a T f x dx f a f b -==+=+=⎰.1[()4()()](412.82) 3.13333626b a a b S f a f f b -+=++=++=.33[7()32()12()32()7()]904241(28120.47058938.481.9214)90282.790589903.1421176555b a a b a b a b C f a f f f f b -+++=++++=++++==在例1-1中,我们根据梯形求积公式,辛普森求积公式,柯特斯求积公式和它们的流程图编写出它的程序,见附录A,B,C.将程序输入到C++里进行测试,经过反复的修正和改错,得到了便于计算且实用的程序.上机实现的运行结果见附录A,B,C.程序运行结果:梯形求积公式结果是:3.000000 辛普森求积公式结果是:3.13333 柯特斯求积公式结果是:3.142118上机计算的结果为,与例题1-1中的算数结果是一致的.说明这个梯形求积公式的程序是正确无误的,可以应用到复杂的数值计算中.第二章 高斯型求积公式牛顿-柯特斯型求积公式是封闭的(区间[,]a b 的两端点,a b 均是求积节点)而且要求求积节点是等距的,受此限制,牛顿-柯特斯求积公式的代数精度只能是n (n 为奇数)或1n +(n 为偶数).而如果对求积节点也适当的选取,即在求积公式中不仅k A 而且k x 也加以选取,这就可以增加自由度,从而可提高求积公式的代数精度.§2.1 高斯型求积公式的有关定义定义2.1 求积公式0()()nbk k ak f x dx A f x =≈∑⎰含有22n +待定参数,(0,1,),k k x A k n = 适当选择这些参数使其具有21n +次代数精度.这类求积公式称为高斯型求积公式.Guass 求积公式的节点(0,1)k x k n = 是高斯点,系数k A 称为Guass 系数.对于任意次数不超过21n +的多项式均能准确成立()()()nbk k ak x f x dx A f x ρ=≈∑⎰(2-1)称其为带权的高斯公式.定义2.2 若求积公式0()()()nbk k ak x f x dx A f x ρ=≈∑⎰对一切不高于m 次的多项式()p x 都等号成立,即()0R p =;而对于某个1m +次多项式等号不成立,则称次求积公式的代数精度为m .因为Guass 求积公式也是插值型求积公式,故有结论:1n +个节点的插值型求积公式的代数精度d 满足:21n d n ≤≤+.定理2.1 插值型求积公式0()()nbk k ak f x dx A f x =≈∑⎰其节点(0,1,)k x k n = 是高斯点的充分必要条件是以这些点为零点的多项式0()()nk k x x x ω==-∏与任意次数不超过n 的多项式()P x 均正交:()()0baP x x dx ω=⎰定理2.2 设()[,],f x C a b ∈则高斯求积公式是收敛的.即lim ()()().nbk k an k A f x f x x dx ρ→∞==∑⎰定理2.3 高斯求积公式总是稳定的,即0,0,1,.k A k n >= 定理2.4 设节点01,,,[,],n x x x a b ∈ 则求积公式()()()nbk k ak x f x dx A f x ρ=≈∑⎰的代数精度最高为21n +次.高斯公式的分类及其余项见表2-1表2-1常用的高斯求积公式名称高斯-勒让德 高斯-切比雪夫 高斯-拉盖尔高斯-埃尔米特积分区间 [1,1]-[1,1]-[0,]+∞[,]-∞+∞权函数 ()1x ρ=21()1x xρ=-()x x e ρ-=2()x x e ρ-=公式11()()nkk k f x dx Af x -=≈⎰∑121()1()nkkk f x dx x A f x -=≈-⎰∑00()()xnkk k e f x Af x +∞-=≈⎰∑2()()x nkk k ef x Af x +∞--∞=≈⎰∑余项 2343(22)2[(1)!]*(23)[(22)!]()n n n R n n f η+++=++2(2)2*2(2)!()n n R n f πη= 2(22)[(1)!]*[2(1)!]()n n R n f ξ++=+1(22)(1)!*2(22)!()n n n R n f πξ+++=+零点 01,,n x x x 21cos(),220,1,,k k x n k n π+=+= 01,,n x x x 01,,n x x x求积系数见表2-21k A n π=+221[(1)!][()]k k n k n x A L x ++=1212(1)!*[()]n k nk A n H x π++=+'图2.1 高斯型求积公式流程图§2.2利用正交多项式构造高斯求积公式设(),0,1,2,,n P x n = 为正交多项式序列,()n P x 具有如下性质: 1.对每一个,()n n P x 是n 次多项式.0,1,n =求解高斯型求积公式若求积公式代数精度为n ,则分别将21,,,n x x x 准确代入积分公式中,从而得到方程组.以1n +次正交多项式的零点01,,n x x x 作为高斯点构造高斯点解方程组求得高斯点k x及高斯系数k A求得高斯点k x利用正交多项式待定系数法求得高斯系数()()bk k aA x l x dx ρ=⎰2.(正交性)()()()0,()bi j ax P x P x dx i j ρ=≠⎰3.对任意一个次数1n ≤-的多项式()P x ,有()()()0,1bn ax P x P x dx n ρ=≥⎰4.()n P x 在(,)a b 内有n 个互异零点.利用正交多项式构造高斯求积公式的步骤:Step 1 以1n +次正交多项式的零点01,,,n x x x 作为积分点(高斯点)。
牛顿插值公式
牛顿插值公式
牛顿插值公式是一种用于近似拟合多元函数或曲线的数学工具,它也是数值分析中常用的技术之一。
提出者是英国科学家牛顿,用于17世纪插补曲线的插值数学表达式,是最早的插值法之一。
其基本
原理是在所有已知点之间拟合出一个梯形多项式,以获得更多未知点的函数值。
牛顿插值公式的核心是一种构造插值多项式的定理,即牛顿第二种插值定理,它表明,如果有n+1个已知点,当插入的连续函数的阶数不大于n时,这n+1个点可以用n阶多项式,经由特定的条件构造出来。
根据牛顿插值公式,按照特定的条件,可以构造出一个连续函数的插值多项式,这个插值多项式可以用来拟合多元函数或曲线,此方法的优点是可以计算出比原函数更多的未知点的函数值。
牛顿插值公式的实现方法有两种:一种是正向实现,一种是反向实现。
正向实现方法,即先利用牛顿插值公式计算出插值多项式的系数,然后根据插值多项式给定的指定点获得这些点的函数值。
反向实现方法,即先使用牛顿插值公式计算出已知点的函数值,然后根据已知点的函数值求出插值多项式的系数。
牛顿插值公式具有许多优点,它可以计算出比原函数更多的未知点的函数值,这样拟合的曲线比较平滑,准确性更高。
同时,牛顿插值公式的实现过程只需要进行几次矩阵的乘法及加法,算法的效率比
较高。
因此,牛顿插值公式在实际中得到了广泛的应用。
它可以用来拟合未知点的函数值、实验结果的拟合、做算法的实型仿真等等,是数值分析中不可多得的重要工具。
总之,牛顿插值公式不仅可以满足多元函数或曲线的近似拟合,而且它的实现过程也比较简单,容易理解,效率也比较高,所以得到了广泛的应用。
sinc内插公式
sinc内插公式
(最新版)
目录
1.引言:介绍 sinc 内插公式
2.sinc 内插公式的定义和原理
3.sinc 内插公式的应用
4.结论:总结 sinc 内插公式的特点和优势
正文
sinc 内插公式是一种在离散点上求解内插值的数学公式,广泛应用
于信号处理、图像处理、数值计算等领域。
其独特的计算方式和优秀的插值性能,使其成为内插公式中的一种重要类型。
sinc 内插公式的定义和原理相对简单。
sinc 函数是正弦函数和余弦函数的差值,其取值范围在 [-1,1] 之间。
sinc 内插公式就是利用 sinc 函数在离散点上求解内插值。
其公式表达式为:
y(x) = (sin(πx/h) - sin(π(x-1)/h)) / π
其中,y(x) 表示 x 点的内插值,h 表示采样间隔。
sinc 内插公式的应用主要体现在以下几个方面:
首先,sinc 内插公式在信号处理中的应用十分广泛。
比如在音频处
理中,sinc 内插公式可以用来恢复音频信号中的高频分量,提高音频的
质量。
其次,sinc 内插公式在图像处理中也有广泛的应用。
由于 sinc 内
插公式的插值结果具有较好的平滑性,因此可以用来对图像进行平滑处理,提高图像的视觉效果。
最后,sinc 内插公式在数值计算中也有重要的应用。
比如在求解微
分方程时,sinc 内插公式可以用来进行数值积分,提高数值计算的精度。
sinc插值和NUFFT小结
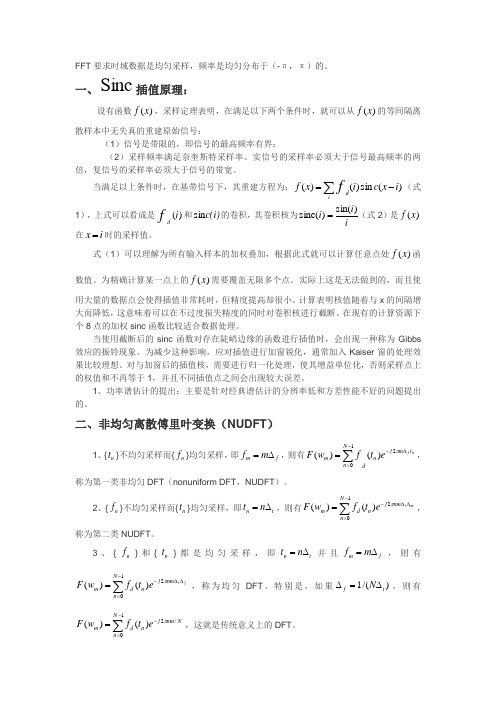
FFT 要求时域数据是均匀采样,频率是均匀分布于(-π,π)的。
一、Sinc 插值原理:设有函数)(x f ,采样定理表明,在满足以下两个条件时,就可以从)(x f 的等间隔离散样本中无失真的重建原始信号:(1)信号是带限的,即信号的最高频率有界;(2)采样频率满足奈奎斯特采样率。
实信号的采样率必须大于信号最高频率的两倍,复信号的采样率必须大于信号的带宽。
当满足以上条件时,在基带信号下,其重建方程为:)(sin )()(i x c i x f idf-=∑(式1),上式可以看成是)(i fd和c(i)sin 的卷积,其卷积核为ii i )sin()(sinc =(式2)是)(x f 在i x =时的采样值。
式(1)可以理解为所有输入样本的加权叠加,根据此式就可以计算任意点处)(x f 函数值。
为精确计算某一点上的)(x f 需要覆盖无限多个点。
实际上这是无法做到的,而且使用大量的数据点会使得插值非常耗时,但精度提高却很小。
计算表明核值随着与x 的间隔增大而降低,这意味着可以在不过度损失精度的同时对卷积核进行截断。
在现有的计算资源下个8点的加权sinc 函数比较适合数据处理。
当使用截断后的sinc 函数对存在陡峭边缘的函数进行插值时,会出现一种称为Gibbs 效应的振铃现象。
为减少这种影响,应对插值进行加窗锐化,通常加入Kaiser 窗的处理效果比较理想。
对与加窗后的插值核,需要进行归一化处理,使其增益单位化,否则采样点上的权值和不再等于1,并且不同插值点之间会出现较大误差。
1、功率谱估计的提出:主要是针对经典谱估计的分辨率低和方差性能不好的问题提出的。
二、非均匀离散傅里叶变换(NUDFT )1、{n t }不均匀采样而{n f }均匀采样,即f m m f ∆=,则有nf t m j n dN n m et f w F ∆--=∑=π21)()(,称为第一类非均匀DFT (nonuniform DFT ,NUDFT )。
数学建模讲座之五---插值和拟合
3.应用实例
3.1 数控机床加工零件 3.2 山区地形地貌图 3.3 海底曲面图
2012-8-25
数学建模
3.1 数控机床加工零件
表1 x间隔0.2的加工坐标x,y(图1右半部的数据)
0.0,5.00 1.0,2.50 2.0,1.00
0.2,4.71 1.2,2.05 2.2,0.86
v
2012-8-25
0 -5 -4 -3 -2 -1 0 1 2 3 4
0.5
数学建模
5
图2 逆时针方向转90度的结果
u
图1 零件的轮廓线(x间隔0.2)
数控机床加工零件
程序
% 按照表1输入原始数据 x=[0:0.2:5, 4.8:-0.2:0]; y=[5 4.71 4.31 3.68 3.05 2.5 2.05 1.69 1.4 1.18 1 0.86 0.74 0.64 0.57 0.5 ... 0.44 0.4 0.36 0.32 0.29 0.26 0.24 0.2 0.15 0 -1.4 -1.96 -2.37 -2.71 ... -3 -3.25 -3.47 -3.67 -3.84 -4 -4.14 -4.27 -4.39 -4.49 -4.58 -4.66 ... -4.74 -4.8 -4.85 -4.9 -4.94 -4.96 -4.98 -4.99 -5]; % 逆时针方向转90度,节点(x, y)变为(u, v) v0=x; u0=-y; % 按0.05的间隔在u方向产生插值点 u=-5:0.05:5; % 在v方向计算分段线性插值 v1=interp1(u0,v0,u); % 在v方向计算三次样条插值 v2=spline(u0,v0,u); % 在(x, y)坐标系输出结果 [v1' v2' -u'] subplot(1,3,1),plot(x,y),axis([0 5 -5 5]) gtext('原轮廓线','FontSize',12) subplot(1,3,2),plot(v1,-u),axis([0 5 -5 5]) gtext('分段线性插值','FontSize',12) subplot(1,3,3),plot(v2,-u),axis([0 5 -5 5]) gtext('三次样条插值','FontSize',12) 2012-8-25 数学建模
常见的插值方法及其原理

常见的插值方法及其原理插值是指在已知数据点的情况下,根据其中一种规则或算法,在这些数据点之间进行预测或估计。
常见的插值方法有:拉格朗日插值、牛顿插值、分段线性插值、样条插值和Kriging插值等。
1.拉格朗日插值方法:拉格朗日插值是一种基于多项式的插值方法。
它假设已知数据点的函数曲线可以由一个多项式来表示。
拉格朗日插值的原理是,通过确定多项式的系数,使多项式在已知数据点上满足给定的函数值。
具体地说,对于给定的一组已知数据点和对应的函数值,拉格朗日插值方法通过构造一个多项式,使得该多项式在每个数据点上的函数值等于给定的函数值。
然后,通过该多项式在插值点上的函数值来估计未知数据点的函数值。
2.牛顿插值方法:牛顿插值也是一种基于多项式的插值方法,其原理类似于拉格朗日插值。
它也是通过确定多项式的系数,使多项式在已知数据点上满足给定的函数值。
不同的是,牛顿插值使用了差商的概念,将插值多项式表示为一个累次求和的形式。
具体地说,对于给定的一组已知数据点和对应的函数值,牛顿插值方法通过差商的计算,得到一个多项式表达式。
然后,通过该多项式在插值点上的函数值来估计未知数据点的函数值。
3.分段线性插值方法:分段线性插值是一种简单而常用的插值方法。
它假设在两个相邻已知数据点之间的曲线是一条直线。
分段线性插值的原理是,通过连接相邻数据点之间的线段,构造一个连续的曲线。
具体地说,对于给定的一组已知数据点和对应的函数值,分段线性插值方法将曲线划分为若干小段,每一小段都是一条直线。
然后,在每个数据点之间的区域上,通过线性插值来估计未知数据点的函数值。
4.样条插值方法:样条插值是一种基于插值条件和光滑条件的插值方法。
它假设在两个相邻已知数据点之间的曲线是一个低次数的多项式。
样条插值的原理是,通过确定各个数据点之间的插值多项式系数,使得整个曲线在插值点上的各阶导数连续。
具体地说,对于给定的一组已知数据点和对应的函数值,样条插值方法将曲线划分为若干小段,每一小段都是一个低次数的多项式。
数值分析常用的插值方法
数值分析常用的插值方法数值分析中常用的插值方法有线性插值、拉格朗日插值、分段线性插值、Newton插值、Hermite插值、样条插值等。
下面将对这些插值方法进行详细介绍。
一、线性插值(linear interpolation)线性插值是最简单的插值方法之一、假设已知函数在两个点上的函数值,通过这两个点之间的直线来估计中间点的函数值。
线性插值公式为:f(x)=f(x0)+(x-x0)*(f(x1)-f(x0))/(x1-x0)其中,f(x)表示要求的插值点的函数值,f(x0)和f(x1)是已知的两个点上的函数值,x0和x1是已知的两个点的横坐标。
二、拉格朗日插值(Lagrange interpolation)拉格朗日插值是一种基于多项式的插值方法。
它通过多个已知点的函数值构造一个多项式,并利用这个多项式来估计其他点的函数值。
拉格朗日插值多项式的一般形式为:f(x) = Σ[f(xi) * Li(x)] (i=0,1,2,...,n)其中,f(x)表示要求的插值点的函数值,f(xi)是已知的多个点的函数值,Li(x)是拉格朗日基函数。
拉格朗日基函数的表达式为:Li(x) = Π[(x-xj)/(xi-xj)] (i≠j,i,j=0,1,2,...,n)三、分段线性插值(piecewise linear interpolation)分段线性插值是一种逐段线性近似函数的方法。
通过将整个插值区间分成多个小段,在每个小段上使用线性插值来估计函数的值。
分段线性插值的过程分为两步:首先确定要插值的点所在的小段,在小段上进行线性插值来估计函数值。
四、Newton插值(Newton interpolation)Newton插值也是一种基于多项式的插值方法。
利用差商的概念来构造插值多项式。
Newton插值多项式的一般形式为:f(x)=f(x0)+(x-x0)*f[x0,x1]+(x-x0)*(x-x1)*f[x0,x1,x2]+...其中,f(x)表示要求的插值点的函数值,f(x0)是已知的一个点的函数值,f[xi,xi+1,...,xi+k]是k阶差商。
数值计算实习报告-牛顿插值算法(高分)
安徽工业大学数理科学与工程学院《数值计算实习》------牛顿插值算法姓名:班级:学号:指导老师:2014年6月23日星期一目录1.提出问题 (2)2.实验目的: (2)3.基础概念: (2)3.1牛顿插值多项式的原理 (2)3.2均差(差商)及其性质 (4)3.3牛顿插值公式及其余项的公式: (5)4.算法设计 (5)5. Matlab程序实现及应用 (6)5.1举例应用 (6)5.2命令执行图: (8)6.结果分析 (9)参考文献 (9)附录一:牛顿插值的MATLAB实现 (10)附录二:误差的Matlab实现 (10)附录三:生成图像 (10)1.提出问题上学期通过对《数值分析》的学习,我们知道可以用插值法求一个待定函数来近似反映函数的特性,使得待定函数在给定点上等于函数值,在其它点上的函数的值作为函数的近似值。
利用差值函数很容易得到Lagrange 插值多项式,公式结构紧凑,在理论分析中甚为方便。
而由Lagrange 插值多项式的插值基函数:可知其公式中的每一项与所有的插值结点有关.因此,Lagrange 插值虽然易算,但若要增加一个节点时,全部基函数 )(x l i 都需重新算过,计算量太大,在实际计算中十分不利,为了克服这一缺点,于是产生了Newton 插值法。
2.实验目的:通过对牛顿插值多项式的Matlab 程序实现,深入了解牛顿插值多项式的原理及编程解决实际问题的能力。
3.基础概念:3.1牛顿插值多项式的原理我们知道两点直线公式)),(),,((11++k k k k y x y x 有:我们考虑点斜式,两点为((x 0,y 0)(x 1,y 1)),则直线方程为:那么,在此基础上增加一个节点(x2,y2),则过这三个点的插值多项式就是:)(x l j 1010010()()y y P x y x x x x -=+--11111111()()(()(k k k k k kk kk k k k k ky y L x y x x x x x x x x L x y y x x x x ++++++-=+----=+--点斜式)两点式)∏≠=--=n ji i i j ix x x x 0)()(c(x)应该是一个二次多项式。
sinc插值法
Sinc插值法
Sinc插值法是一种常用的信号重建方法,可将离散采样的信号再次插值为连续的函数。
它的核心思想是将采样序列中的每个样本点,看做是一个sinc函数与Dirac脉冲函数的卷积。
通过调节sinc函数的因子,可以得到不同类型的插值结果。
Sinc插值法具有很好的频域特性和定理保持特性,但这需要在插值时对函数进行一定的截断运算。
同时,Sinc插值法计算复杂度较高,强制要求在一定频带内插值,插值点与采样点距离过大会使插值误差增加,所以在实际应用中需要对插值参数进行优化选择,保证插值误差在可接受范围内。
在信号处理、图像处理和地震勘探等领域,Sinc插值法得到了广泛的应用。
除了Sinc插值法外,还有其它一些经典的插值算法,例如最近邻插值、线性插值、三次样条插值等。
在具体应用中,可以根据需要选择合适的插值方法。
内外插值法——精选推荐

第四章 內外插值法(Inter /Extra-polations)首先我們是針對等間距之內插法來討論,因為這是較常見到的。
通常有兩種方法來執行此一種內插程序,它們是(a) 有限差分法:可直接作成差分表(b) Lagrangian方法:這是將高階差分在可忽略狀況下,捨位後所得之值。
這種忽略有時候正確。
有 時候則不然。
只有利用差分表來檢驗它的誤差。
4.1 有限差分法(Finite difference methods)(a) Newton-Gregory前向公式我們的目的是表示y(x+ph)而x代表任何參考點,那麼可得y(x+ph)=E P y(x)=(1+Δ)P y(x)利用二項式定理展開()()()()()()()P2p p-1y x ph 1y x y x p y x y x 2!+=+∆=+∆+∆()()()3p p-1p-2y x ...........3!+∆+ (4.1)範例4.1 :y=1/x ,利用Newton-Gregory 之前向公式。
計算y(3.15)到五位有效數字。
(解) 由式(4.1)令x=3.1 h=0.1 p=0.5()()()()()0.31746 0.31746 0.00005-161-0.0006181-0.01008-210.32258 3.15y ==+=正確解(b)Newton-Gregory 後向公式同樣地,將先前前向公式之E=(1+Δ)改成(1-▽)-1則y(x))-(1y(x)E ph)y(x -PP∇==+y(x)2!1)p(p y(x)p y(x)2∇++∇+= .........y(x)3!2)1)(p p(p 3+∇+++ (4.2)範例4.2:y=1/x ,利用Newton-Gregory 之後向公式,計算y(3.64)到5位有效數字(解) 令h=0.1 p=0.4 x=3.6()()()()()()()()()()0.274750.274730.000462.41.40.40.0004721.40.40.00730.40.277783.64y ==−++−+=正確解(c)高斯中央差分公式現在我們用1+δE 1/2來取代E 所以()()()()()()()()()x ....}y E δ3!2-p 1-p p E δ2!1-p p pδ{1 x y δE1x y E ph x y 3/2321/2P1/2P +++Ε+=+==+()()()()() (4.3) ...........23h x y 3!2-p 1-p p h x y 2!1-p p 2h x y p x y 32++δ++δ++δ+=現在利用中央差分符號來寫出差分表表4.1中央差分表y(x-2h) δ2y(x-2h)δy(x-h 23) δ3y(x-h 23)y(x-h) δ2y(x-h) δ4y(x-2h)δy(x-2h ) δ3y(x-2h )y(x) δ2y(x) δ4y(x)δy(x+2h ) δ3y(x+2h )y(x+h) δ2y(x+h) δ4y(x+h)δy(x+h 23) δ3y(x+h 23)y(x+2h) δ2y(x+2h)前述虛線之路徑即是方程式(4.3)所表示的。
拉格朗日插值多项式和牛顿均差逼近(DOC X页)

一、拉格朗日插值多项式 算法描述拉格朗日插值多项式是一种最常见的多项式插值法,也是一种最常用的逼近工具。
设f(x)是定义在区间[a,b]上的函数,又设x1,x2,…,xn 是[a,b]上的个(1)且满足()⎩⎨⎧=≠=i j ij x l j i 10 (2)显然),,2,1,0()(n i y x L i i n == (3)满足(3)的插值多项式)(x L n 可表示为()()∑==nk k k n x l y x L 0(4)由()x l k 的定义,知()()()n j y x l y x L j nk k k n ,,2,1,00===∑= (5)我们称)(x L n 为Lagrange 插值多项式。
若引入记号()()()()nnxxxxxxxw---=+11,(6)容易求得()()()()()nkikikkkn xxxxxxxxxw----=+-+111'(7)[][][]kikjjik j i xx x x f x x f x x x f --=,,,, (12) 为f (x )关于kj i x x x ,,的二阶差商,一般的,称[][][]k k k k x x x x x f x x x f x x x f --=-01011010,,,,,, (13) 为f (x )关于点kx x x 10,的k 阶差商。
具有如下基本性质:各阶差商具有线性性,若()()()x b x a x f ϕφ+=,则对任意正整数k ,都有[][][]k k k x x x b x x x a x x x f ,,,,,,101010ϕφ+= (14)若f (x )是n 次多项式,则一阶差商是n-1次多项式。
若f (x )在[a ,b]上存在n 阶导数,且[]()n i b a x i 1,0,=∈则n 阶差商与导数之间存在如下关系[]()()[]b a n f x x f n n ,!,,0∈=ζζ 。
sufer中插值方法介绍
sufer中插值方法介绍1、距离倒数乘方法距离倒数乘方格网化方法是一个加权平均插值法,可以进行确切的或者圆滑的方式插值。
方次参数控制着权系数如何随着离开一个格网结点距离的增加而下降。
对于一个较大的方次,较近的数据点被给定一个较高的权重份额,对于一个较小的方次,权重比较均匀地分配给各数据点。
计算一个格网结点时给予一个特定数据点的权值与指定方次的从结点到观测点的该结点被赋予距离倒数成比例。
当计算一个格网结点时,配给的权重是一个分数,所有权重的总和等于1.0。
当一个观测点与一个格网结点重合时,该观测点被给予一个实际为 1.0 的权重,所有其它观测点被给予一个几乎为0.0 的权重。
换言之,该结点被赋给与观测点一致的值。
这就是一个准确插值。
距离倒数法的特征之一是要在格网区域内产生围绕观测点位置的"牛眼"。
用距离倒数格网化时可以指定一个圆滑参数。
大于零的圆滑参数保证,对于一个特定的结点,没有哪个观测点被赋予全部的权值,即使观测点与该结点重合也是如此。
圆滑参数通过修匀已被插值的格网来降低"牛眼"影响。
2、克里金法克里金法是一种在许多领域都很有用的地质统计格网化方法。
克里金法试图那样表示隐含在你的数据中的趋势,例如,高点会是沿一个脊连接,而不是被牛眼形等值线所孤立。
克里金法中包含了几个因子:变化图模型,漂移类型和矿块效应。
3、最小曲率法最小曲率法广泛用于地球科学。
用最小曲率法生成的插值面类似于一个通过各个数据值的,具有最小弯曲量的长条形薄弹性片。
最小曲率法,试图在尽可能严格地尊重数据的同时,生成尽可能圆滑的曲面。
使用最小曲率法时要涉及到两个参数:最大残差参数和最大循环次数参数来控制最小曲率的收敛标准。
4、多元回归法多元回归被用来确定你的数据的大规模的趋势和图案。
你可以用几个选项来确定你需要的趋势面类型。
多元回归实际上不是插值器,因为它并不试图预测未知的Z 值。
它实际上是一个趋势面分析作图程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FFT 要求时域数据是均匀采样,频率是均匀分布于(-π,π)的。
一、
Sinc 插值原理:
设有函数)(x f ,采样定理表明,在满足以下两个条件时,就可以从)(x f 的等间隔离
式(1)可以理解为所有输入样本的加权叠加,根据此式就可以计算任意点处)(x f 函数值。
为精确计算某一点上的)(x f 需要覆盖无限多个点。
实际上这是无法做到的,而且使用大量的数据点会使得插值非常耗时,但精度提高却很小。
计算表明核值随着与x 的间隔增大而降低,这意味着可以在不过度损失精度的同时对卷积核进行截断。
在现有的计算资源下个8点的加权sinc 函数比较适合数据处理。
当使用截断后的sinc 函数对存在陡峭边缘的函数进行插值时,会出现一种称为Gibbs 效应的振铃现象。
为减少这种影响,应对插值进行加窗锐化,通常加入Kaiser 窗的处理效果比较理想。
对与加窗后的插值核,需要进行归一化处理,使其增益单位化,否则采样点上的权值和不再等于1,并且不同插值点之间会出现较大误差。
1、功率谱估计的提出:主要是针对经典谱估计的分辨率低和方差性能不好的问题提出的。
二、非均匀离散傅里叶变换(NUDFT )
1、{n t }不均匀采样而{n f }均匀采样,即f m m f ∆=,则有n
f t m j n d
N n m e
t f w F ∆--=∑
=π21
)()(,
称为第一类非均匀DFT (nonuniform DFT ,NUDFT )。
2、{n f }不均匀采样而{n t }均匀采样,即t n n t ∆=,则有∑-=∆∆-=1
2)()(N n nm j n
d m m
t e t f
w F π,称为第二类NUDFT 。
3、{n f }和{n t }都是均匀采样,即t n n t ∆=并且f m m f ∆=,则有
∑-=∆∆-=1
02)()(N n nm j n d m f
t e
t f w F π,称为均匀DFT 。
特别是,如果)/(1t f N ∆=∆,则有
∑-=-=10
/2)()(N n N nm j n d m e t f w F π,这就是传统意义上的DFT 。
为了方便,我们将两类NUFFT 表示为完全离散的符号形式:
∑-==
1
2M m n
v j m n m e
h H π
∑-==
2
/2
/2N N n n
v j n
m m e
g G π
其中n=-N/2,-N/2+1,…N/2-1,]2/1,2/1[-∈m v 表示非均匀采样位置。
三、NUFFT 算法
1、第一类NUDFT 可由NUFFT 算法加速的流程
1)、由公式NUFFT 算法采用最小均方误差的解)()()(1
c b A A A c x H
H
-=计算插值系数)(m r c x ,这里r=-q/2,-q/2+1,…q/2,m=0,1,…M-1。
需要))1((2
M q O +个乘数。
2)、计算Fourier 系数∑+-∈=
rml
uc q q r m
r m l m c x h
]][2/,2/[)(τ。
需要))1((M q O +个乘法数。
3)、使用FFT 计算∑=-==
2
/2
//2uN l uN l uN
nl j l
n e
T πτ。
需要))log((uN uN O 个乘法数。
4)、 n n T s H .1
-∧
=。
需要)(N O 个乘法。
2、第二类NUDFT 可由NUFFT 算法加速的流程
1)、由公式由公式NUFFT 算法采用最小军方误差的解)()()(1c b A A A c x H
H -=计算插值系数)(m r c x ,这里r=-q/2,-q/2+1,…q/2,m=0,1,…M-1。
需要))1((2
M q O +个乘数。
2)、计算n n n g s t .1
-=。
需要)(N O 个乘法数。
3)、使用FFT 计算∑=-==
2
/2
//2uN l uN l uN
nl j l
n e
T πτ。
需要))log((uN uN O 个乘法数。
4)、计算∑-∈+∧
=
]
2/,2/[][)(q q r r uc m
r
m T c
x G ,需要))1((M q O +个乘法数。
可以看出,NUFFT-1和NUFFT-2算法十分相似,并且具有相同的计算复杂度。
他们的区别在于:NUFFT-1处理非均匀间隔的输入数据,所以为了使用FFT 技术,需要首先将输入数据插值到均匀间隔上,如NUFFT-1流程第2步所示,NUFFT-2处理均匀间隔输入非均匀间隔输出变换,所以可以首先使用FFT 得到在变换空间的均匀采样数据,然后将他们插值到期望的输出采样间隔上,该插值过程在NUFFT-2中的最后一步完成。
四、NUFFT 的优点:NUFFT是一种时频非均匀采样的变换的快速算法,把数据直
接进行NUFFT变换,而不像传统方法需要先对数据进行插值才能用来成像,因此可以减少差值带来的误差以及所需花费的额外操作。