§17借助于Matlab用贯序算法求解目标规划问题
应用MATLAB工具箱求解规划问题
应用MATLAB 优化工具箱求解规划问题如今,规划类问题是常见的数学建模问题,离散系统的优化问题一般都可以通过规划模型来求解。
用MATLAB 求解规划问题,可以避免手工的烦琐计算,大大提高工作效率和结果的准确性。
MA TLAB 是一种应用于数学计算及计算结果可视化处理的面向对象的高性能计算机语言,它以矩阵和向量为基本数据单位,从而提高程序的向量化程度,提高计算效率,尤其适合于线性规划、整数规划、多元规划、二元规划类问题的算法编写,以及数据拟合、参数估计、插值等数据处理法。
利用MA TLAB 提供的强大的规划模型求解命令,可以简单快速地得到所要的结果。
本文主要对线性规划、非线性规划、整数规划、单目标约束规划以及多目标规划等规划问题在MATLAB 中的实现做比较详细的讲解.线性规划问题线性规划是一种优化方法,MA TLAB 优化工具箱中有现成函数linprog 对标准型LP 问题求解。
线性规划问题是目标函数和约束条件均为线性函数的问题,MATLAB 中线性规划的标准型为:Min f ’x..A x b s t Aeq x beq lb x ub ⋅≤⎧⎪⋅=⎨⎪≤≤⎩其中f 、x 、b 、beq 、lb 、ub 为向量,A 、Aeq 为矩阵。
其他形式的线性规划问题都可经过适当变化化为以上标准型。
线性规划是一种优化方法,MATLAB 优化工具箱中有现成函数linprog 对标准型LP 问题求解。
在MATLAB 指令窗口运行help linprog 可以看到所有的函数调用形式,如下:x = linprog(f,A,b) %求min f’x ;s.t. b x A ≤⋅线性规划的最优解x = linprog(f,A,b,Aeq,beq) %等式约束beq x Aeq =⋅,若没有不等式约束,则A=[],b=[]。
若没有等式约束,则Aeq=[],beq=[]x = linprog(f,A,b,Aeq,beq,lb,ub) %指定x 的范围ub x lb ≤≤x = linprog(f,A,b,Aeq,beq,lb,ub,x0) %设置初值x0x = linprog(f,A,b,Aeq,beq,lb,ub,x0,options) % options 为指定优化参数进行最小化[x,fval] = linprog(...) %返回目标函数最优值,即fval= f’x[x,lambda,exitflag] = linprog(...) % lambda 为解x 的Lagrange 乘子[x,lambda,exitflag,output] = linprog(...) % exitflag 为终止迭代的条件[x,fval,exitflag,output,lambda] = linprog(...) % output 为输出优化信息exitflag 描述函数计算的退出条件:若exitflag>0表示函数收敛于解x ,exitflag=0表示目标达到函数估值或迭代的最大次数,exitflag<0表示函数不收敛于解x ;lambda 返回x 处的拉个朗日乘子:lambda.lower 表示下界lb ,lambda.upper 表示上界ub ,lambda.ineqlin 表示线性不等式约束,lambda.eqlin 表示线性等式约束,lambda 中的非0元素表示对应的约束是有效约束;output 返回优化信息:output.iterations 表示迭代次数,output.algorithm 表示使用的运算规则,output.cgiterations 表示PCG 迭代次数。
基于Matlab的动态规划算法的实现及应用
基于Matlab的动态规划算法的实现及应用动态规划(Dynamic Programming)是一种用来求解多阶段最优化问题的方法,在许多领域中都得到了广泛的应用。
本文将介绍如何使用Matlab实现动态规划算法,并通过一个具体的应用案例来说明其使用方法和效果。
动态规划算法的基本思想是将一个问题分解成多个阶段,每个阶段的最优解可以通过前一阶段的最优解来计算得到。
具体实现时,需要定义一个状态转移方程来描述问题的阶段之间的关系,以及一个递推公式来计算每个阶段的最优解。
在Matlab中,可以使用矩阵来表示问题的状态和状态转移方程,使用循环结构来进行递推计算。
下面以求解最长递增子序列(Longest Increasing Subsequence)为例来说明动态规划算法在Matlab中的实现和应用。
最长递增子序列是一个经典的动态规划问题,给定一个序列,找出一个最长的子序列,使得子序列中的元素是递增的。
可以使用动态规划算法来求解该问题。
定义一个状态数组dp,其中dp(i)表示以第i个元素结尾的最长递增子序列的长度。
初始化dp数组为1,表示每个元素自身就是一个递增子序列。
然后,使用一个循环结构遍历序列的每个元素,计算以当前元素结尾的最长递增子序列的长度。
具体实现时,需要比较当前元素与之前的元素的关系,如果当前元素大于之前的元素,则可以将当前元素加入到之前的最长递增子序列中,并更新dp(i)为dp(j)+1,其中j为小于i的所有元素的位置。
遍历dp数组,找出其中的最大值,即为整个序列的最长递增子序列的长度。
下面是Matlab代码的实现:```matlabfunction LIS = LongestIncreasingSubsequence(nums)N = length(nums);dp = ones(1, N);for i = 1:Nfor j = 1:i-1if nums(i) > nums(j)dp(i) = max(dp(i), dp(j)+1);endendendLIS = max(dp);end```以上代码定义了一个函数LongestIncreasingSubsequence,输入参数为一个序列nums,输出结果为最长递增子序列的长度LIS。
基于Matlab的动态规划算法的实现及应用

基于Matlab的动态规划算法的实现及应用动态规划是一种解决多阶段决策过程的优化技术。
它的主要思想是将问题分成几个阶段,在每个阶段用一个状态来描述问题,然后找到在每个阶段中符合条件的最优状态值,以便决定在一个阶段结束的时候采取什么决策。
在Matlab中,可以非常方便地实现动态规划算法。
这里简要介绍一下基于Matlab的动态规划算法的实现及应用。
首先,我们需要定义状态转移方程。
状态转移方程是动态规划算法的核心,决定了如何从一个状态转移到另一个状态。
例如,我们要用动态规划算法求解一个背包问题,物品的重量为w1,w2,w3,w4,w5,物品的价值为v1,v2,v3,v4,v5,背包的容量为W。
那么状态转移方程可以定义如下:dp(i,j) = max(dp(i-1,j), dp(i-1,j-w(i))+v(i))其中dp(i,j)表示前i个物品放入容量为j的背包中所能得到的最大价值。
i表示物品的数量,j表示背包的容量。
w(i)表示第i个物品的重量,v(i)表示第i个物品的价值。
上式中的max表示在当前状态下,应该选择哪个状态值。
然后我们需要初始化第一个状态dp(1,j),当只考虑第1个物品时,dp(1, j)的值与w(1)和v(1)有关。
当物品数量为0时,dp(i, j)的值为0。
接下来,我们可以使用循环以及状态转移方程来计算出dp(i,j)的值,最终得到最优的解。
在Matlab中,可以利用循环完成状态转移方程的计算,例如:dp(1,:) = (w(1) <= j).*v(1);在上述代码中,利用循环计算每个状态的最大价值。
第一行是初始化第一个状态,即当只有一个物品的时候,dp(1, j)的值为v(1)或0。
第二行是循环计算后续状态的最大价值,根据状态转移方程进行计算。
在实际应用中,动态规划算法可以用于诸如最优路径规划、时间序列分析、机器学习等领域。
例如,在机器学习中,动态规划算法可以用于序列模型的预测和分类问题。
数学建模中规划问题的MATLAB求解
min P ( x, M )
的最优解 x 也是原问题的最优解。
【例 2-10】求非线性规划问题的解
min f ( x) x1 x2 8
2 x1 x2 0 2 s.t. x1 x2 2 0 x , x 0 1 2
2 2
function g=test(x) M=50000; f=x(1)^2+x(2)^2+8; g=f-M*min(x(1),0)-M*min(x(2),0)-M*min(x(1)^2-x(2),0)... +M*abs(-x(1)-x(2)^2+2);
命令窗输入[x,y]=fminunc('test',rand(2,1))
第二章
规划问题的MATLAB求解
2.1 线性规划 2.2 非线性规划
2.3 整数规划
数学规划模型
序:
规划问题是常见的数学建模问题,离散系统的优化问题 一般都可以通过规划模型来求解。因此快速求解规划问题是 数学建模的基本素质。利用MATLAB提供的规划模型求解命 令,可以快速得到想要的结果。
2.1 线性规划
以下介绍外罚函数法,内罚函数法参考PPT“内罚函数 法”。
设规划模型为 min f ( x)
gi ( x ) 0, i 1 ~ r s.t. hi ( x ) 0, i 1 ~ s k ( x ) 0, i 1 ~ t i
取充分大的数 M 0 ,构造函数 P ( x , M ) f ( x ) M max( g i ( x ), 0) M min( hi ( x ), 0)
用Matlab解法求解线性规划问题
实验目的:用Matlab解法求解线性规划问题
实验一:
题目:求解线性规划问题:
方法一:Matlab解法
算法设计:
1、先求Z的最小值,再取相反数即为所求的最大值。
2、将第一个约束条件改为 。以便与另外两个约束条件保持不等号方向的一致。
3、根据所给的约束条件,利用x=linprog(c,a,b)求解
求值程序:
c=[-3,-1];
a=[-1,1;1,-2;3,2];
b=[2;2;14];
[x,fval]=linprog(c,a,b)
运行结果:
x =
4.0000
1.0000
fval=-13.0000
结果处理及分析:当x1=4 , x2=1时,(-Z)取最小值-13,Z取最大值13.
方法二:图像法
程序代码:
b=[180;200];
aeq=[];
beq=[];
vlb=[0;0;0];
vub=[];
[x,fval]=linprog(c,a,b,aeq,beq,vlb,vub)
maxz=-fval
运行结果:
x =
34.0000
0.0000
44.0000
fval =
-584.0000
maxz =
584.0000
x=-4:1:4;
y1=x-2;
y2=2*x+2;
y3=1/3*(14-2*x);
y4=1/3*(13-x);
plot(x,y1,x,y2,x,y3,x,y4,’:’)
经过对直线的适度调整后,得到图像为:
结果处理及分析:根据约束条件,星型图案所在的闭合三角形为可行域,易知,蓝色虚线代表的目标函数过A(1,4)时,Z取最大值13。
基于Matlab的动态规划算法的实现及应用
基于Matlab的动态规划算法的实现及应用动态规划算法是解决许多计算问题的有效方法,它可以用于组合优化、资源分配和时间序列分析等方面。
Matlab是一种高级计算软件,提供了许多内置函数,使得动态规划算法的实现变得简单。
一、动态规划算法的基本思想动态规划算法是一种优化技术,可以用于解决一些复杂的计算问题。
它的基本思想是把一个大问题分解成一系列子问题,通过解决子问题得到整体的最优解。
在动态规划算法中,通常使用递推式来描述问题的最优解。
在Matlab中,动态规划算法的实现通常包括以下几个步骤:1.定义状态变量:根据问题的特性,定义一组状态变量,用于描述问题的状态。
2.制定状态转移方程:根据问题的条件和规则,制定一组状态转移方程,用于计算问题的最优解。
3.构建转移矩阵:将状态转移方程转化为矩阵形式,便于计算和优化。
4.初始化状态变量:将初始状态赋值给状态变量,用于递推计算。
5.递推计算:根据状态转移矩阵和当前状态,计算下一时刻状态的值,直到达到目标状态。
6.输出最优解:输出最终状态对应的最优解。
三、应用实例1.背包问题背包问题是一种组合优化问题,目标是在给定的一组限制条件下,尽可能地装满容量限制的背包。
动态规划算法可以有效解决背包问题。
function [optx,optf]=knapsack(w,v,c)%w:物品的重量; v:物品的价值; c:背包容量%optx:最优解; optf:最优解对应的函数值n=length(w); %物品数量f=zeros(n+1,c+1); %状态变量fx=zeros(1,n); %物品的选择变量xfor i=1:nfor j=1:cif j<w(i) %背包容量不足的情况f(i+1,j)=f(i,j);else %背包容量足够的情况f(i+1,j)=max(f(i,j),f(i,j-w(i))+v(i));endendendoptf=f(n+1,c); %最优解j=c; %从后往前寻找物品for i=n:-1:1if f(i+1,j)>f(i,j)x(i)=1;j=j-w(i);endendoptx=x; %最优解2.最长公共子序列问题最长公共子序列问题是一种字符串匹配问题,目标是在两个字符串中找到最长的公共连续子序列。
基于Matlab的动态规划算法的实现及应用

基于Matlab的动态规划算法的实现及应用动态规划算法是一种解决多阶段决策问题的优化方法,它可以在每个阶段选择最优决策,并且在各个阶段间保持最优子结构,从而达到整体最优的目的。
在实际应用中,动态规划算法被广泛用于求解优化问题、路径规划、资源分配等方面。
本文将介绍基于Matlab 的动态规划算法的实现及应用,并深入探讨其在实际问题中的应用。
一、动态规划算法的基本原理动态规划算法的基本原理是通过将问题分解为子问题,并计算每个子问题的最优解,然后存储下来以供后续使用。
最终得到整体最优解。
动态规划算法通常包括以下几个步骤:1. 确定状态和状态转移方程:首先需要确定问题的状态,然后建立状态之间的转移关系,也就是状态转移方程。
状态转移方程描述了问题的子问题之间的关系,是动态规划算法的核心。
2. 初始化:初始化动态规划数组,将初始状态下的值填入数组中。
3. 状态转移:利用状态转移方程计算出各个阶段的最优解,并将其存储在动态规划数组中。
4. 求解最优解:根据动态规划数组中存储的各个阶段的最优解,可以得到整体最优解。
Matlab是一种强大的计算软件,具有丰富的数值计算函数和可视化工具,非常适合实现动态规划算法。
下面以一个简单的背包问题为例,介绍如何在Matlab中实现动态规划算法。
假设有n件物品,每件物品的重量为w[i],价值为v[i]。
现在有一个容量为C的背包,问如何选择物品放入背包,使得背包中物品的总价值最大。
我们需要确定问题的状态和状态转移方程。
在这个问题中,我们可以定义状态dp[i][j]表示在前i件物品中选择若干个放入容量为j的背包中所能获得的最大价值。
状态转移方程可以表示为:dp[i][j] = max(dp[i-1][j], dp[i-1][j-w[i]] + v[i])然后,我们可以利用Matlab实现这个动态规划算法,代码如下:```matlabfunction max_value = knapsack(w, v, C)n = length(w);dp = zeros(n+1, C+1);for i = 1:nfor j = 1:Cif j >= w(i)dp(i+1,j+1) = max(dp(i,j+1), dp(i,j-w(i)+1)+v(i));elsedp(i+1,j+1) = dp(i,j+1);endendendmax_value = dp(n+1,C+1);end```三、动态规划算法在实际问题中的应用动态规划算法在实际问题中有着广泛的应用,下面以路径规划问题为例,介绍动态规划算法的应用。
Matlab求解线性规划和整数规划问题
Matlab求解线性规划和整数规划问题Matlab是一种功能强大的数学软件,可以用于求解线性规划和整数规划问题。
在本文中,我将详细介绍如何使用Matlab来解决这些问题。
首先,让我们了解一下线性规划和整数规划的基本概念。
线性规划是一种数学优化问题,其目标是在给定的一组约束条件下,最大化或者最小化线性目标函数。
整数规划是线性规划的一种扩展形式,其中变量被限制为整数值。
为了使用Matlab求解线性规划和整数规划问题,我们需要使用Matlab中的优化工具箱。
请确保你已经安装了该工具箱,并准备好了你的问题的数学模型。
在Matlab中,我们可以使用"linprog"函数来求解线性规划问题。
该函数的基本语法如下:[x, fval, exitflag, output] = linprog(f, A, b, Aeq, beq, lb, ub)其中,参数f是目标函数的系数向量,A和b是不等式约束的系数矩阵和右侧向量,Aeq和beq是等式约束的系数矩阵和右侧向量,lb和ub是变量的下界和上界。
函数的输出包括最优解x,最优目标函数值fval,退出标志exitflag以及输出信息output。
接下来,让我们通过一个具体的例子来演示如何使用Matlab求解线性规划问题。
假设我们有以下线性规划问题:最小化目标函数:f = [4, 3, 5]约束条件:A = [1, 1, 1; 2, 1, 3; 1, 2, 2]b = [6; 10; 8]变量的下界和上界:lb = [0; 0; 0]ub = []我们可以使用以下代码来求解这个问题:f = [4, 3, 5];A = [1, 1, 1; 2, 1, 3; 1, 2, 2];b = [6; 10; 8];lb = [0; 0; 0];ub = [];[x, fval, exitflag, output] = linprog(f, A, b, [], [], lb, ub);最优解x将包含变量的最优值,最优目标函数值fval将给出最小化的结果。
Matlab求解线性规划和整数规划问题

Matlab求解线性规划和整数规划问题Matlab是一种强大的数学软件,可以用来求解各种优化问题,包括线性规划和整数规划问题。
在本文中,我将详细介绍如何使用Matlab来求解这两类问题。
首先,让我们来了解一下线性规划和整数规划问题的定义和特点。
线性规划是一种数学优化问题,其目标是在给定一组线性约束条件下,找到使目标函数取得最大(或最小)值的变量值。
线性规划问题的目标函数和约束条件均为线性函数。
整数规划是线性规划的一种扩展形式,其解必须是整数。
整数规划问题通常更难求解,因为整数变量的取值范围更有限。
接下来,我将分别介绍如何使用Matlab来求解线性规划和整数规划问题。
1. Matlab求解线性规划问题首先,我们需要定义线性规划问题的目标函数和约束条件。
假设我们要最大化一个线性目标函数,同时满足一组线性约束条件。
在Matlab中,我们可以使用线性规划求解器函数`linprog`来求解线性规划问题。
以下是使用`linprog`函数的一般语法:```matlab[x, fval, exitflag, output] = linprog(f, A, b, Aeq, beq, lb, ub)```其中,`f`是目标函数的系数向量,`A`和`b`是不等式约束条件的系数矩阵和常数向量,`Aeq`和`beq`是等式约束条件的系数矩阵和常数向量,`lb`和`ub`是变量的下界和上界。
下面是一个示例,展示如何使用`linprog`函数求解一个线性规划问题:f = [-1; -2]; % 目标函数的系数向量A = [1, 1; -1, 2; 3, 2]; % 不等式约束条件的系数矩阵b = [2; 2; 6]; % 不等式约束条件的常数向量[x, fval, exitflag, output] = linprog(f, A, b)```在上述示例中,我们的目标是最小化目标函数`f = -x1 - 2x2`,同时满足约束条件`x1 + x2 >= 2`,`-x1 + 2x2 >= 2`,`3x1 + 2x2 >= 6`。
Matlab求解线性规划和整数规划问题
Matlab求解线性规划和整数规划问题标题:Matlab求解线性规划和整数规划问题引言概述:线性规划和整数规划是数学中常见的优化问题,通过Matlab可以方便地求解这些问题。
本文将介绍如何使用Matlab求解线性规划和整数规划问题,包括问题的建模、求解方法和实际操作步骤。
一、线性规划问题的建模和求解1.1 确定优化目标:线性规划问题的目标是最大化或者最小化一个线性函数,通常表示为目标函数。
1.2 约束条件建模:线性规划问题还需要满足一系列线性约束条件,这些约束条件可以通过不等式或者等式表示。
1.3 使用Matlab求解:在Matlab中,可以使用linprog函数来求解线性规划问题,将目标函数和约束条件输入函数即可得到最优解。
二、整数规划问题的建模和求解2.1 确定整数规划问题:整数规划是线性规划的一个扩展,其中变量需要取整数值。
2.2 整数规划建模:整数规划问题可以通过将变量限制为整数来建模,通常使用0-1整数变量表示。
2.3 使用Matlab求解:Matlab中提供了intlinprog函数来求解整数规划问题,输入目标函数、约束条件和整数变量的取值范围即可得到最优解。
三、线性规划和整数规划问题的实际操作步骤3.1 准备数据:首先需要准备问题的数据,包括目标函数系数、约束条件系数和整数变量范围。
3.2 建立模型:将数据输入Matlab中的相应函数,建立线性规划或者整数规划模型。
3.3 求解问题:调用Matlab函数求解问题,得到最优解和最优值。
四、Matlab求解线性规划和整数规划问题的优势4.1 高效性:Matlab提供了高效的优化算法,能够快速求解复杂的线性规划和整数规划问题。
4.2 灵便性:Matlab支持多种约束条件和整数变量类型,可以灵便应对不同类型的优化问题。
4.3 可视化:Matlab还可以将优化结果可视化展示,匡助用户更直观地理解问题和解决方案。
五、总结通过本文的介绍,我们了解了如何使用Matlab求解线性规划和整数规划问题,包括建模方法、求解步骤和优势。
Matlab求解线性规划和整数规划问题

Matlab求解线性规划和整数规划问题Matlab是一种强大的数学计算工具,可以用于求解各种数学问题,包括线性规划和整数规划问题。
本文将详细介绍如何使用Matlab求解线性规划和整数规划问题,并提供相应的代码示例和结果分析。
一、线性规划问题的求解线性规划问题是一类常见的数学优化问题,其目标是在一组线性约束条件下,找到使目标函数最优化的变量值。
在Matlab中,可以使用线性规划函数“linprog”来求解线性规划问题。
下面以一个简单的线性规划问题为例进行说明。
假设有如下线性规划问题:目标函数:maximize 2x1 + 3x2约束条件:x1 + x2 ≤ 5x1 - x2 ≤ 2x1, x2 ≥ 0首先,我们需要定义目标函数的系数矩阵和约束条件的系数矩阵。
在Matlab 中,可以使用矩阵来表示这些系数。
可以按照以下方式定义:c = [-2; -3]; % 目标函数的系数矩阵A = [1 1; 1 -1]; % 约束条件的系数矩阵b = [5; 2]; % 约束条件的右侧常数然后,我们可以使用“linprog”函数来求解线性规划问题。
代码如下:x = linprog(c, A, b); % 求解线性规划问题最后,我们可以输出求解结果,并进行结果分析。
代码如下:disp('最优解为:')disp(x)disp('目标函数的最优值为:')disp(-c'*x)运行以上代码,即可得到线性规划问题的最优解和目标函数的最优值。
在这个例子中,最优解为x1=2,x2=3,目标函数的最优值为-13。
二、整数规划问题的求解整数规划问题是线性规划问题的一种扩展,其变量需要取整数值。
在Matlab 中,可以使用整数规划函数“intlinprog”来求解整数规划问题。
下面以一个简单的整数规划问题为例进行说明。
假设有如下整数规划问题:目标函数:minimize 2x1 + 3x2约束条件:x1 + x2 ≥ 5x1 - x2 ≤ 2x1, x2 ≥ 0x1, x2为整数首先,我们需要定义目标函数的系数矩阵和约束条件的系数矩阵。
Matlab求解线性规划和整数规划问题
Matlab求解线性规划和整数规划问题Matlab是一款强大的数学建模和计算软件,可以用于求解各种数学问题,包括线性规划和整数规划问题。
本文将详细介绍如何使用Matlab来求解线性规划和整数规划问题,并给出相应的示例。
1. 线性规划问题求解步骤线性规划问题是一类数学优化问题,其目标函数和约束条件都是线性的。
求解线性规划问题的普通步骤如下:步骤1:定义决策变量首先,需要定义决策变量。
决策变量是问题中需要优化的变量,通常用符号x1, x2, ..., xn表示。
步骤2:定义目标函数其次,需要定义目标函数。
目标函数是需要最小化或者最大化的线性函数,通常用符号f(x)表示。
例如,最小化目标函数f(x) = c1*x1 + c2*x2 + ... + cn*xn。
步骤3:定义约束条件然后,需要定义约束条件。
约束条件是问题中需要满足的条件,通常用一组线性等式或者不等式表示。
例如,约束条件可以是 a1*x1 + a2*x2 + ... + an*xn <= b。
步骤4:求解线性规划问题最后,使用Matlab的线性规划求解函数进行求解。
Matlab提供了linprog函数来求解线性规划问题。
该函数的基本用法如下:[x, fval] = linprog(f, A, b, Aeq, beq, lb, ub)其中,f是目标函数的系数向量,A和b是不等式约束条件的系数矩阵和右侧常数向量,Aeq和beq是等式约束条件的系数矩阵和右侧常数向量,lb和ub是决策变量的下界和上界。
函数的返回值x是最优解向量,fval是最优解对应的目标函数值。
2. 整数规划问题求解步骤整数规划问题是线性规划问题的一种扩展,要求决策变量必须取整数值。
求解整数规划问题的普通步骤如下:步骤1:定义决策变量同样,首先需要定义决策变量。
步骤2:定义目标函数和约束条件然后,定义目标函数和约束条件,与线性规划问题相似。
步骤3:求解整数规划问题最后,使用Matlab的整数规划求解函数进行求解。
基于Matlab的线性规划问题求解_盛仲飙

下 ,求 目 标 函 数 极 值 的 问 题[2]。
2 线 性 规 划 问 题
2.1 线 性 规 划 问 题 模 型 线性规划的目标 函 数 可 以 是 求 最 大 值,也 可 以 是 求 最
小值,约束条件可以是不等式也可以是等 式,变 量 可 以 有 非
负要求也可以没有非负要求。为了避免这种由于形式多样 性 而 带 来 的 不 便 ,规 定 线 性 规 划 问 题 的 标 准 型 为[3,6]
化论,在计算机上模 拟 生 命 进 化 机 制 而 发 展 起 来 的 一 门 新
学科,它根据适者生存、优胜劣汰等自然进 化 规 则 搜 索 和 计
算问题的解。
遗传的基本思想是从一个代表最优化问题解的一组初
始值进行搜索,这组 解 称 为 一 个 群,种 群 由 一 定 数 量、通 过
基因编码的个体组成,其中每个个体称为 染 色 体,不 同 个 体
Vol.40 No.10 26
基于 Matlab的线性规划问题求解*
盛仲飙 (渭南师范学院数学与信息科学学院计算机网络工程技术中心 渭南 714000)
摘 要 线性规划是运筹学中研究较早、发展较快、应用广泛、方法成熟的一个重要分 支,它 是 辅 助 人 们 进 行 科 学 管 理 的 一 种 重 要 的 数 学方法。文章首先介绍了线性规划的基本概念及标准形式 ,着重讨论 了 线 性 规 划 问 题 的 三 种 常 用 解 法 :单 纯 形 法、直 接 搜 索 法 以 及 遗 传 算 法,最后在 Matlab R2009a环境下进行了仿真。通过结果可以看出,用 Matlab求解线性规划问题,可以避免手工的烦琐计算,大 大 地 提 高 工 作效率和结果的准确性。
据大量的内存空间,在迭代过程中,实际上 有 很 多 计 算 是 多
用MATLAB求解线性规划问题
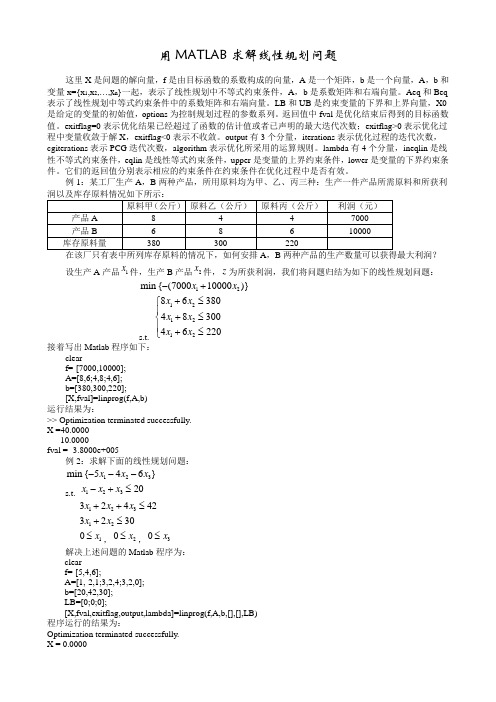
用MATLAB 求解线性规划问题这里X 是问题的解向量,f 是由目标函数的系数构成的向量,A 是一个矩阵,b 是一个向量,A ,b 和变量x={x 1,x 2,…,x n }一起,表示了线性规划中不等式约束条件,A ,b 是系数矩阵和右端向量。
Aeq 和Beq 表示了线性规划中等式约束条件中的系数矩阵和右端向量。
LB 和UB 是约束变量的下界和上界向量,X0是给定的变量的初始值,options 为控制规划过程的参数系列。
返回值中fval 是优化结束后得到的目标函数值。
exitflag=0表示优化结果已经超过了函数的估计值或者已声明的最大迭代次数;exitflag>0表示优化过程中变量收敛于解X ,exitflag<0表示不收敛。
output 有3个分量,iterations 表示优化过程的迭代次数,cgiterations 表示PCG 迭代次数,algorithm 表示优化所采用的运算规则。
lambda 有4个分量,ineqlin 是线性不等式约束条件,eqlin 是线性等式约束条件,upper 是变量的上界约束条件,lower 是变量的下界约束条件。
它们的返回值分别表示相应的约束条件在约束条件在优化过程中是否有效。
例1:某工厂生产A ,B 两种产品,所用原料均为甲、乙、丙三种:生产一件产品所需原料和所获利设生产A 产品1x 件,生产B 产品2x 件,z 为所获利润,我们将问题归结为如下的线性规划问题:12min {(700010000)}x x -+s.t. 121212863804830046220x x x x x x +≤⎧⎪+≤⎨⎪+≤⎩接着写出Matlab 程序如下:clearf=-[7000,10000];A=[8,6;4,8;4,6];b=[380,300,220];[X,fval]=linprog(f,A,b)运行结果为:>> Optimization terminated successfully.X =40.000010.0000fval = -3.8000e+005例2:求解下面的线性规划问题:123min {546}x x x ---s.t. 12320x x x -+≤12332442x x x ++≤123230x x +≤10x ≤,20x ≤,30x ≤解决上述问题的Matlab 程序为:clearf=-[5,4,6];A=[1,-2,1;3,2,4;3,2,0];b=[20,42,30];LB=[0;0;0];[X,fval,exitflag,output,lambda]=linprog(f,A,b,[],[],LB)程序运行的结果为:Optimization terminated successfully.X = 0.000015.00003.0000fval = -78.0000exitflag = 1output = iterations: 6cgiterations: 0algorithm: 'lipsol' lambda = ineqlin: [3x1 double]eqlin: [0x1 double]upper: [3x1 double]lower: [3x1 double]。
利用matlab软件求解线性规划问题

利用matlab软件求解线性规划问题2013年4月17日利用matlab软件求解线性规划问题摘要:线性规划被广泛地应用于工业、交通、国防、经济、管理等领域,已成为现代科学管理的重要手段和管理决策的有效方法。
本文给出运用线性规划求解,解决维修保洁服务员工的招聘和排班问题,使得在满足客户需求的前提下,达到成本最低。
其中,线性规划的求解是运用matlab软件,方便快捷。
关键词:线性规划排班matlabAbsract:Linear programming has been applied in industry,traffic, economy and manangementwidely,and it has become an important and efficient means of modern scientific manangement.Settlemeng by programming is explained in this article,which is used to give the most reasonable number of people in each shift in the consumer service center,in purpose of using the lowest cost to meet the consumers.We use matlab to settle the problem,which is convenient and shortcut.Key words:linear programming stuff shift arrangement matlab1 引言线性规划作为运筹学的一个分支,它的应用已越来越深入到社会生产和经济活动的各个领域。
线性规划有三要素:优化对象,目标函数,约束条件。
我们把时间问题抽象成数学模型,然后再利用相关理论求解,即寻求满足约束条件的目标函数的最优解。
如何在Matlab中进行线性规划问题求解

如何在Matlab中进行线性规划问题求解线性规划(Linear Programming,LP)是数学规划的一个重要分支,其能够高效地解决许多实际问题。
在工业、运输、金融等领域中,线性规划的应用十分广泛。
而Matlab作为一种功能强大的数学软件,也提供了许多工具和函数用于线性规划问题的求解。
本文将介绍在Matlab中进行线性规划问题求解的基本步骤和常用函数。
一、线性规划概述线性规划是一种寻找线性目标函数在线性约束条件下的最优解的方法。
通常情况下,线性规划问题可以表示为:max/min z = c^T * xsubject to A * x <= bx >=0其中,c和x是n维向量,A是m×n的矩阵,b是m维向量。
目标是求解向量x的取值,使得目标函数c^T * x在满足约束条件A * x <= b和x >=0的前提下,取得最大(或最小)值z。
二、Matlab中线性规划求解函数Matlab中提供了多个函数用于线性规划问题的求解,其中最常用的是“linprog”函数。
linprog函数的基本语法如下所示:[x, fval, exitflag, output] = linprog(f, A, b, Aeq, beq, lb, ub, options)其中,参数f是目标函数的系数向量,A和b是不等式约束的矩阵和右侧向量,Aeq和beq是等式约束的矩阵和右侧向量,lb和ub分别是变量的下界和上界向量,options是优化选项。
三、解决实际问题的例子假设有一家电子公司,为了提高利润,决定如何分配生产资源。
公司生产三种产品A、B、C,每种产品所需的生产时间分别为5小时、10小时和15小时。
已知公司每周的生产时间为80小时,每单位产品的利润分别为5、8和10。
现在问题是如何分配生产时间,使得总利润最大化。
首先,我们需要确定目标函数和约束条件。
根据题意,我们可以将目标函数设置为z = 5*x(1) + 8*x(2) + 10*x(3),其中x(1)、x(2)和x(3)分别表示产品A、B、C的生产数量。
Matlab求解线性规划和整数规划问题
Matlab求解线性规划和整数规划问题线性规划(Linear Programming)是一种优化问题的数学建模方法,用于求解线性约束条件下的最优解。
整数规划(Integer Programming)是线性规划的一种扩展形式,要求变量取整数值。
在Matlab中,可以使用优化工具箱中的函数来求解线性规划和整数规划问题。
以下将详细介绍如何使用Matlab进行线性规划和整数规划的求解。
1. 线性规划问题的求解步骤:a. 定义目标函数:首先,需要定义线性规划问题的目标函数。
目标函数可以是最小化或最大化某个线性表达式。
b. 定义约束条件:其次,需要定义线性规划问题的约束条件。
约束条件可以是等式或不等式形式的线性表达式。
c. 构建模型:将目标函数和约束条件组合成一个线性规划模型。
d. 求解模型:使用Matlab中的优化工具箱函数,如linprog,对线性规划模型进行求解。
e. 分析结果:分析求解结果,包括最优解和对应的目标函数值。
2. 整数规划问题的求解步骤:a. 定义目标函数和约束条件:与线性规划问题类似,首先需要定义整数规划问题的目标函数和约束条件。
b. 构建模型:将目标函数和约束条件组合成一个整数规划模型。
c. 求解模型:使用Matlab中的优化工具箱函数,如intlinprog,对整数规划模型进行求解。
d. 分析结果:分析求解结果,包括最优解和对应的目标函数值。
下面以一个具体的例子来说明如何使用Matlab求解线性规划和整数规划问题。
例子:假设有一家工厂生产两种产品A和B,每天的生产时间为8小时。
产品A每单位利润为100元,产品B每单位利润为200元。
生产一个单位的产品A需要2小时,生产一个单位的产品B需要4小时。
工厂的生产能力限制为每天最多生产10个单位的产品A和8个单位的产品B。
求解如何安排生产,使得利润最大化。
1. 定义目标函数和约束条件:目标函数:maximize 100A + 200B约束条件:2A + 4B <= 8A <= 10B <= 8A, B >= 02. 构建模型:目标函数可以表示为:f = [-100; -200],即最大化-f的线性表达式。
Matlab求解线性规划和整数规划问题

Matlab求解线性规划和整数规划问题线性规划和整数规划是数学规划中的两个重要分支,广泛应用于运筹学、经济学、工程学等领域。
Matlab作为一种功能强大的数值计算软件,提供了丰富的工具箱和函数,可以方便地求解线性规划和整数规划问题。
一、线性规划问题的求解线性规划问题是在一组线性约束条件下,求解线性目标函数的最优值的问题。
通常可以表示为如下形式的标准线性规划问题:Maximize (or Minimize) Z = c'xSubject to: Ax ≤ bx ≥ 0其中,c是长度为n的目标函数系数向量,x是长度为n的决策变量向量,A是m×n的系数矩阵,b是长度为m的约束条件向量。
在Matlab中,可以使用线性规划工具箱(Linear Programming Toolbox)中的函数linprog来求解线性规划问题。
linprog函数的基本语法如下:[x, fval, exitflag, output, lambda] = linprog(c, A, b, Aeq, beq, lb, ub, x0, options)其中,c是目标函数系数向量,A和b是不等式约束条件的系数矩阵和约束条件向量,Aeq和beq是等式约束条件的系数矩阵和约束条件向量,lb和ub是决策变量的下界和上界,x0是初始解向量,options是求解选项。
linprog函数的输出结果包括最优解x、最优目标函数值fval、退出标志exitflag、输出信息output和拉格朗日乘子lambda。
二、整数规划问题的求解整数规划问题是在线性规划问题的基础上,要求决策变量取整数值的问题。
通常可以表示为如下形式的标准整数规划问题:Maximize (or Minimize) Z = c'xSubjec t to: Ax ≤ bx ≥ 0x为整数在Matlab中,可以使用整数规划工具箱(Integer Programming Toolbox)中的函数intlinprog来求解整数规划问题。
§17借助于Matlab用贯序算法求解目标规划问题

§17.借助于Matlab 用贯序算法求解目标规划问题虽然Matlab 没有提供直接求解目标规划的优化工具,但是根据目标规划的求解思路——单纯形方法。
我们可以将一个目标规划问题分解成若干线性规划问题,通过序贯式算法借助于Matlab 优化工具进行求解。
例1:教材第6章第3节中的目标规划问题:-+-++++=3322211)(min d p d d p d p Z11221≤+x x 01121=-+-+-d d x x1022221=-+++-d d x x561083321=-+++-d d x x)3,2,1(0,,,21=≥+-i d d x x i i首先将上述问题化为标准形式:-+-++++=3322211)(min d p d d p d p Z112321=++x x x01121=-+-+-d d x x1022221=-+++-d d x x561083321=-+++-d d x x)3,2,1(0,,=≥+-i d d x i i i然后按照以下步骤分解计算:第一步:求解如下线性规划问题:min d1 2x1+x2+x3=11 x1-x2+d1_-d1=0x1,x2,x3>=0,d1_>=0,d1>=0对上述线性规划问题,可以借助于Matlab 优化工具中的linprog 函数求解,函数调用命令为:[x,fval]=linprog(f,[],[],Aeq,beq,lb,[])其中,参数如下:Aeq= 2111-101-10000 beq=11f=0 00010000lb=0 00000000运行后,得求解结果如下:Optimization terminated successfully.x =0.16456.06284.6083267.4155261.5173fval =即:d1=0第二步:求解如下线性规划问题:min d2_+d22x1+x2+x3=11x1-x2+d1_-d1=0x1+2x2+d2_-d2=10d1=0x1,x2,x3>=0,d1_>=0,d1>=0,d2_>=0,d2>=0对上述线性规划问题,可以借助于Matlab优化工具中的linprog函数求解,函数调用命令为:[x,fval]=linprog(f,[],[],Aeq,beq,lb,[],x0)其中,参数如下:Aeq=2 1 1 0 0 0 0 0 01 -1 0 1 -1 0 0 0 01 2 0 0 0 1 -1 0 00 0 0 0 1 0 0 0 0beq=1110f=0 0 0 0 0 1 1 0 0lb=0 00000000x0=0.16456.06284.6083267.4155261.5173运行后,得求解结果如下:x =0.05774.97125.91354.91350.00000.0000fval =5.1844e-010即:d2_+d2=5.1844e-010≈0第三步:求解如下线性规划问题:min d3_2x1+x2+x3=11x1-x2+d1_-d1=0x1+2x2+d2_-d2=108x1+10x2+d3_-d3=56d1=0d2_+d2=0x1,x2,x3>=0; d1_>=0,d1>=0,d2_>=0,d2>=0,d3_>=0,d3>=0对上述线性规划问题,可以借助于Matlab优化工具中的linprog函数求解,函数调用命令为:[x,fval]=linprog(f,[],[],Aeq,beq,lb,[],x0)其中,参数如下:Aeq=2 1 1 0 0 0 0 0 01 -1 0 1 -1 0 0 0 01 2 0 0 0 1 -1 0 08 10 0 0 0 0 0 1 -10 0 0 0 1 0 0 0 00 0 0 0 0 1 1 0 0beq=111056f=0 0 0 0 0 0 0 1 0lb=0 00000000x0=0.05774.97125.91354.9135运行后,输出结果如下:x =2.27933.86032.58101.58100.00000.00000.00000.8380fval =3.6940e-013最后得到如下一组满意解:2.27933.86032.5811.5810 0 0.838可以看出,以上求解的满意解方案不同于用Lindo 软件求得的结果。
Matlab在目标规划问题中的应用
Matlab在目标规划问题中的应用问题提出:在生活和工作中,人们对于同一个问题往往会提出多个解决方案,并通过各方面的论证从中提取最佳方案。
最优化方法就是专门研究如何从多个方案中科学合理地提取出最佳方案的科学。
优化问题无所不在,最优化方法的应用和研究也已经深入到了生产和科研的各个领域,如军事指挥、机械工程、运输调度、生产控制、经济规划与管理等,并取得了显著的经济效益和社会效益。
这学期我们系统科学专业指挥类学员开设运筹学这门课,初步见识最优化方法的魅力。
如今最优化方法的发展迅速,已经包含有多个分支,如线性规划、整数规划、非线性规划、动态规划、多目标规划等。
利用Matlab的优化工具箱,可以求解线性规划、非线性规划和多目标规划问题。
在学习运筹学的过程中,我们了解所谓优化问题,就是求解如下形式的最优解:Min fun (x)Sub. to [C.E.][B.C.]其中fun (x)称为目标函数,“Sub. to”为“subject to”的缩写,由其引导的部分称为约束条件。
[C.E.]表示Condition Equations,即条件方程,可为等式方程,也可为不等式方程。
[B.C.]表示Boundary Conditions,即边界条件,用来约束自变量的求解域,以lb≤x≤ub的形式给出。
当[C.E.]为空时,此优化问题称为自由优化或无约束优化问题;当[C.E.]不空时,称为有约束优化或强约束优化问题。
在优化问题中,根据变量、目标函数和约束函数的不同,可以将问题大致分为:·线性优化目标函数和约束函数均为线性函数。
·二次优化目标函数为二次函数,而约束条件为线性方程。
线性优化和二次优化统称为简单优化。
·非线性优化目标函数为非二次的非线性函数,或约束条件为非线性方程。
·多目标优化目标函数并非一个时,称为多目标优化问题。
线性规划等最优化方法只有一个目标函数,是单目标最优化方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
122§17.借助于Matlab 用贯序算法求解目标规划问题虽然Matlab 没有提供直接求解目标规划的优化工具,但是根据目标规划的求解思路——单纯形方法。
我们可以将一个目标规划问题分解成若干线性规划问题,通过序贯式算法借助于Matlab 优化工具进行求解。
例1:教材第6章第3节中的目标规划问题:-+-++++=3322211)(min d p d d p d p Z11221≤+x x 01121=-+-+-d d x x1022221=-+++-d d x x561083321=-+++-d d x x)3,2,1(0,,,21=≥+-i d d x x i i首先将上述问题化为标准形式:-+-++++=3322211)(min d p d d p d p Z112321=++x x x01121=-+-+-d d x x1231022221=-+++-d d x x561083321=-+++-d d x x)3,2,1(0,,=≥+-i d d x i i i然后按照以下步骤分解计算: 第一步:求解如下线性规划问题:min d12x1+x2+x3=11 x1-x2+d1_-d1=0x1,x2,x3>=0,d1_>=0,d1>=0对上述线性规划问题,可以借助于Matlab 优化工具中的linprog 函数求解,函数调用命令为:[x,fval]=linprog(f,[],[],Aeq,beq,lb,[]) 其中,参数如下:Aeq= 2 1 1 0 0 0 0 0 0 1 -11-1beq=11 0f=0 0 0 1 0 0 0 0lb=0 00000000运行后,得求解结果如下:Optimization terminated successfully.x =0.16456.06284.6083267.4155261.5173fval =即:d1=0第二步:求解如下线性规划问题:min d2_+d22x1+x2+x3=11x1-x2+d1_-d1=0x1+2x2+d2_-d2=10d1=0x1,x2,x3>=0,d1_>=0,d1>=0,d2_>=0,d2>=0对上述线性规划问题,可以借助于Matlab优化工具中的linprog函数求解,函数调用命令为:[x,fval]=linprog(f,[],[],Aeq,beq,lb,[],x0)其中,参数如下:124Aeq=2110000001-101-10000120001-100000010000beq=1110f=0 00001100lb=0 00000000x0=0.16456.06284.6083267.4155261.5173运行后,得求解结果如下:x =0.05774.97125.91354.91350.00000.0000125fval =5.1844e-010即:d2_+d2=5.1844e-010≈0第三步:求解如下线性规划问题:min d3_2x1+x2+x3=11x1-x2+d1_-d1=0x1+2x2+d2_-d2=108x1+10x2+d3_-d3=56d1=0d2_+d2=0x1,x2,x3>=0; d1_>=0,d1>=0,d2_>=0,d2>=0,d3_>=0,d3>=0对上述线性规划问题,可以借助于Matlab优化工具中的linprog函数求解,函数调用命令为:[x,fval]=linprog(f,[],[],Aeq,beq,lb,[],x0)其中,参数如下:Aeq=2110000001-101-10000120001-100810000001-1000010000000001100beq=111012656f=0 00000010lb=0 00000000x0=0.05774.97125.91354.9135运行后,输出结果如下:x =2.27933.86032.58101.58100.00000.00000.00000.8380fval =3.6940e-013最后得到如下一组满意解:2.27933.86031271282.581 1.581 0 0 0 0 0.838可以看出,以上求解的满意解方案不同于用Lindo 软件求得的结果。
这是因为,该问题本身有多重解,而linprog 函数求解算法又不同于Lindo 的缘故。
有兴趣的读者可以进一步验证,上述解和借助于Lindo 软件用贯序方法求解的结果都是满意解方案。
例2:教材第6章第4节中的目标规划问题,土地利用问题:)()(m in 222111+-+-+++=d d P d d P Z耕地面积约束:⎪⎩⎪⎨⎧=++=++=++200x x x 300x x x 100x x x 332313322212312111最低收获量约束:⎪⎩⎪⎨⎧≥++≥++≥++35000010000x 12000x 14000x 0000310x 0066800x 8000x 1900009000x 9500x 11000x 333231232221131211目标约束为:6100000(X) 111=-++d d f -1296600000(X) 222=-++d d f -即:610000010000x 12000x 14000x +0x 0066800x 8000x + 9000x 9500x 11000x 11333231232221131211=-++++++++-d d00660000x 0089600x 11200x 9000x 10200x 12000x 10800x 11400x 13200x 22333231232221131211=-++++++++++-d d非负约束:1,2,3)j 1,2,3;(i 0x ij ==≥0,00,0,2211≥≥≥≥+-+-d d d d对于上述目标规划问题,可以按照如下两个步骤进行分解求解: 第一步:求解线性规划问题:min d1_+d1 x11+x21+x31=100 x12+x22+x32=300 x13+x23+x33=20011000x11+9500x12+9000x13>=190000 8000x21+6800x22+6000x23>=130000 14000x31+12000x32+10000x33>=35000011000x11+9500x12+9000x13+8000x21+6800x22+6000x23+14000x31+12000x32+10000x 33+d1_-d1=6100000xij>=0 (i,j=1,2,3); d1_>=0, d1>=0对上述线性规划问题,可以借助于Matlab 优化工具中的linprog 函数求解,函数调用命令为:[x,fval]=linprog(f,A,b,Aeq,beq,lb,[])其中,参数如下:A=-11000-9500-900000000000 000-8000-6800-600000000000000-14000-12000-1000000 b=-190000-130000-350000Aeq=10010010000010********0010010010011000 950090008000680060001400012000100001-1 beq=1003002006100000f=00000000011 lb=00000000000求解运行,输出结果:x =33.2724108.3943145.396116.469613054.32020.629650.2580137.285553.97430.00000.0000fval =2.6261e-014即:d1_+d1=2.6261e-014≈0第二步:求解线性规划问题:min d2_+d2x11+x21+x31=100x12+x22+x32=300x13+x23+x33=20011000x11+9500x12+9000x13>=1900008000x21+6800x22+6000x23>=13000014000x31+12000x32+10000x33>=35000011000x11+9500x12+9000x13+8000x21+6800x22+6000x23+14000x31+12000x32+10000x 33+d1_-d1=6100000d1_+d1=013200x11+11400x12+10800x13+12000x21+10200x22+9000x23+11200x31+9600x32+800 0x33+d2_-d2=6600000xij>=0 (i,j=1,2,3); d1_>=0, d1>=0,d2_>=0,d2>=0对上述线性规划问题,可以借助于Matlab优化工具中的linprog函数求解,函数调用命令为:[x,fval]=linprog(f,A,b,Aeq,beq,lb,[])131其中,参数如下:A=-11000-9500-9000000000000 0 000-8000-6800-6000000000 0000000-14000-12000-10000000 0b=-190000-130000-350000Aeq=100100100000 0 010********* 0 001001001000 0 11000 950090008000680060001400012000100001-10 0 13200 1140010800120001020090001120096008000001-10 000000001100 beq=10030020061000006600000f=00000000000 1 1 lb=000000000000 0运行输出求解结果:x =5.9011232.5826198.550312.81454.27711320.790581.284463.14030.65920.00000.00000.00000.0000fval =1.0126e-015即:d2_+d2=1.0126e-015≈0最后得到一个非劣解方案,如下表:I等耕地II等耕地III等耕地水稻 5.901 1 232.582 6 198.550 3大豆12.814 5 4.277 1 0.790 5玉米81.284 4 63.140 3 0.659 2同样可以看出,以上求解的满意解方案不同于用LINDO软件求得的结果。
这是因为,该问题本身有多重解,而linprog函数求解算法又不同于LINDO的缘故。