江南快速自动扶梯电气原理
江南快速SM-04电气原理图

变压器线路更改,相应线路更改
EXPRESS
陈 建 2008-12-25 2
电动机
注:电动机 线屏蔽层在 控制柜侧接 地
PC-E1755 PC-E1875
陈 建 潘伟华
2008-12-25 2009-2-25
first
release
变压器线路更改,相应线路更改
EXPRESS
陈 建 2008-12-25 2A
至轿顶接线箱 To Junction Box
*电梯额定速度≥2m/s时配线* *TO be added when V≥2m/s*
至外呼 To Hall
备用 Standby 电动机电源接触器2 Main SW Output Contact
消防输出常闭信号 Fire SW output
*消防员服务时配线* *To be added with ERO*
first
release
变压器线路更改,相应线路更改
EXPRESS
陈 建 2008-12-25 5
单相整流桥 Selenium Rectifier
制动器 Brake
*制动器吸收装置
抱闸接触器 Brake Contact
计数器 Counter
PC-E1755 PC-E1875
陈 建 潘伟华
2008-12-25 2009-2-25
*消防联动功能时配线* *To be added when fire duplex*
*电机过热保 护时配线*
消防员开关 Fire man SW 电动机电源接触器1检测 Check SW to main contact 电动机电源接触器2检测 Check SW to main contact 抱闸接触器检测 Check SW to brake contact 左抱闸开关检测 Check SW to left brake 右抱闸开关检测 Check SW to right brake 电机过热 保护检测 Motor Overheat 备用 Standby Com
在商场中自动扶梯的原理

在商场中自动扶梯的原理自动扶梯是一种能够垂直运输乘客的移动式运输工具,多见于商场、地铁站和机场等公共场所。
它以工作通道为基础,通过扶梯的特殊构造和动力系统,能够将人员安全、快速地从一层楼运送到另一层楼。
自动扶梯的原理包括机械结构、电气系统和安全保护装置等。
下面将详细讨论自动扶梯的工作原理。
自动扶梯的主要构造有扶梯梁、扶梯台阶、扶梯链轮、手扶栏和安装于不同位置的驱动装置。
扶梯梁位于扶梯下方,由支撑梁和扶梯梁连接起来。
扶梯台阶则是直接安装在扶梯链轮上的多个平行台面。
当乘客站在上面时,扶梯台阶会以连续的循环方式水平移动,将乘客带到另一层楼。
扶梯链轮由电动机驱动,通过链条传动将力量传递到扶梯台阶。
驱动装置是自动扶梯的关键组成部分。
它通常由一个或多个电动马达组成,用于产生制动力和推动扶梯上下运动。
当电动机启动时,通过减速装置,将电动机转速转化为链轮的转动速度,从而驱动扶梯台阶。
自动扶梯的工作原理可以概括为以下几个步骤:1. 启动:当乘客站在自动扶梯的进口处,自动传感器会自动检测到其存在并激活启动装置。
启动装置将信号传输给电动机,使其开始旋转。
2. 按钮控制:在进一步前进之前,乘客可以使用手扶栏旁边的按钮来控制扶梯的运行方向。
例如,当按下向上按钮时,电动机将会将力量传递到链轮,并将扶梯台阶向上推进。
3. 变速装置:扶梯链轮装有一个可调速装置,可以根据需要调整扶梯的运行速度。
这对于乘客的安全和舒适非常重要,因为扶梯在不同的场合可能需要不同的速度。
4. 保护装置:自动扶梯通常配备多个保护装置,以确保乘客的安全。
例如,当扶梯发生异常运行时,可能会触发紧急停机装置,立即停止扶梯运行。
此外,还有防溢出装置、防爬装置和安全边缘保护等安全装置,以防止乘客在乘坐过程中发生意外。
5. 停止:当乘客到达目的地楼层时,他们可以安全地下车。
此时,扶梯会自动停止运行,直到下一位乘客上车为止。
总的来说,自动扶梯通过机械结构和电气系统的相互配合,使得乘客能够安全、舒适地在商场中垂直运输。
自动扶梯的结构和原理(1)

一、自动扶梯工作原理
4、在“驱动主轴”上装有左右两个“梯级驱动链轮”和 一个“扶手带驱动链轮”; 左右两个“梯级驱动链轮”分别带动左右两条“梯级链” (也叫驱动链或牵引链); 一个个梯级就安装在“梯级链”上; 所以左右两条梯级链的长度必须一致,否则将造成梯级跑偏; 所以左右对应的两条链要进行配对; 要求:在5000N的预紧力下,测量左右对应的两段链长, 误差≤ 0.04mm; 这是自动扶梯的一个技术关键;
(三)自动扶梯的主要潜在危险
1、传送带的整体结构是敞开的, 周围的环境容易造成伤害; 2、运动部件的间隙对人体的夹持; 3、对人体的施力方向与人的重力方向不一致, 容易使人倾倒; 扶手带的线速度必须与梯级相同,或略大; 4、传动链的断裂; (包括传动链、梯级链、扶手带的断裂);
下分支 梯级链 张紧轮
(二)梯路
2、梯级
踏板
是扶梯的主要承载部件; · 结构--踢板 踏板、踢板、支架、主辅轮; 分为:整体式和分体式; 梯级的宽度B : 580 < B < 1100; 主轮 支架 梯级高度:不大于 240 踏板面与踢板面做成齿槽, 辅轮 相互啮合,齿顶距不大于6; ·主辅轮 --- 是梯级的主要承载部件; 主辅轮的磨损和变形是影响扶梯运行质量的主要原因之一; 主轮--- 梯级前端两轮,与梯级链连接; 辅轮--- 梯级的后端两轮; 主、辅轮之间的距离称为:基距;分为:短、中、长;
二、自动扶梯的主要参数
1、提升高度:
小高度—6米以下; 中高度--- 6 ~ 20 米; 大高度---- 大于20 米; 2、倾斜角: 标准为 30 ° ; 当H ≤ 6m V≤0.5m/s 时 :倾角可≤ 35°; 当停梯时作楼梯使用,倾角可为:27.3°; 3、运行速度: 当倾角大于30°时,V≤0.5m/s; 当倾角 ≤30°时,V≤0.75m/s; 4、梯级宽度: 名义宽度:600;800;1000; 实际梯级尺寸:宽度—580 ~ 1100; 深度--- 不小于 380; 高度--- 不大于 240;(或210—可作楼梯使用)
江南快速自动扶梯电气原理
插脚
X0 0V 0V 0V 0V 0V 0V 0V
名称 正常 上行 下行 自动 检修 安全 加油 运行 上左梳齿 上右梳齿 上左扶手 上右扶手 上梯级防跳 上梯级下陷 上踏板坠落 下左梳齿 下右梳齿 下左扶手 下右扶手 下梯级防跳 下梯级下陷 左曳引链断 右曳引链断 下踏板坠落
X3 0V 0V 0V 24V 24V 24V 24V
备注
当 X0 为 0V 时 , 故障编码见 表二
X1 24V
0V 24V
0V 24V
0V 24V
故障编码 1 2 3 4 5 6 7
故障名称 主机测速故障
左扶手测速故障 右扶手测速故障
梯级遗失故障 驱动链断链
触点粘连故障 抱闸打开故障
小推力抱闸制动系统
U32
AC220V(+15%)/50HZ/60HZ O32
安装服务部培训资料
第一部分
自动扶梯(人行道)电气原理
OMRON PLC 控制的自动扶梯、自动人行道
ECS-100系列电控系统
型号
ECS-IV ECS-V ECS-99 ECS-2000 ECS-100
PLC
三菱 三菱 三菱 三菱 欧姆龙
防护等级 故障显示 驱动方式
IP20
七段码
星三角
IP20 IP54 IP20,IP54 IP20,IP54
UP
6
7
安全回路
光电节能立柱
上机房插件示意图
TA 24+
I0
101
102
301
302
K0
Xa
Xb
XL
XN
SI
XI
R
S
T
0
自动扶梯的原理是什么
自动扶梯是带有循环运行梯级,用于向上或向下倾斜送乘客的固定电力驱动设备。其原理其实很简单,一个曳引主机,带着一条驱动链在跑,驱动链上装着梯级或者踏板。
由一台特种结构形式的链式输送机和两台特殊结构形式的胶带输送机所组合而成,带有循环运动梯路,用以在建筑物的不同层高间向上或向下倾斜输送乘客的固定电力驱动设备。运载人员上下的一种连续输送机械。
窗体顶端
窗体底端
吚啊吜电梯应急
自动扶梯控制电路工作原理图解

⾃动扶梯控制电路⼯作原理图解⾃动扶梯,⼜称⾃动梯、⾃动电梯或⾃动滚梯。
它的外形与⼀般楼梯相仿,有⼀定倾⾓,⾃动运送⼈员上下,安装在不同标⾼的公共场所,如车站、商场等。
它由梯级、曳引链、驱动装置、梯路导轨、⾦属⾻架、梳齿前沿板、扶⼿装置、润滑系统等组成。
它以单速低噪声⼤起动转矩的三相异步电动机作为动⼒,通过减速机械驱动主轴轮,带动曳引链转动。
曳引链带动梯级运动,使梯级主轮沿着梯路导轨转动,这样就使梯级进⾏上升或下降运⾏。
⾃动扶梯按控制元器件的不同,可分为继电接触器控制式、电⼦式和微机式等⼏类,下⾯以继电接触器控制式⾃动扶梯为例进⾏分析。
⾃动扶梯控制系统由主电路、控制电路、保护电路和电源四部分组成。
下图 (a)是⾃动扶梯的主电路,图(b) 是其继电接触器控制电路,其所⽤电⽓元件见下⾯列表。
⾃动扶梯主电路、控制电路图⾃动扶梯电⽓元件列表:QF1:空⽓断路器;KP:相序继电器;M1:驱动三相异步电动机;M2:制动电动机;M3:润滑液压泵电动机;KM1:M1正转接触器(上升);KM2:M1反转接触器(下降);KM3:△三⾓形连接接触器;KM4:Y星形连接接触器;KM5:制动控制接触器;KM6:润滑液压泵接触器;FR1:驱动电动机热继电器;FR2:制动电动机热继电器;QF2:控制电源断路器;T1:控制电源变压器;SQ1~SQn:保护⽤传感继电器或⾏程开关常闭触点;STP1、STP2:停⽌按钮;SA3、SA4:上⾏/下⾏选择开关;KA1:故障报警中间继电器;KA2:制动器松开到位中间继电器;KA3:上⾏中间继电器;KA4:下⾏中间继电器;KA5:极点⾼度中间继电器;KT1:KM5所带动空⽓阻尼器常闭延时断开触点,作Y-△切换延时;⼀、主电路分析:如图(a)所⽰,其主电路由KM3、KM4控制驱动电动机M1进⾏Y-△降压起动,并且KM1、KM2控制Ml的正反转运转,以拖动扶梯上⾏和下⾏。
M2为制动电动机,M3为润滑液压泵电动机。
江南嘉捷扶梯人行道 VVVF 原理图

220 V
36V
TA Xa
Xb
24+
I0
101
102
201
202
301
302 LP1
XL
XN
U32 O32
TB R
S
T
0
G
TC U21 V21 W21 U22
TC用于Y-△系统
V22 W22
U3
TD U1
V1
W1
U2
TD用于VVVF变频系统
V3
W3
V2
W2
TE LP1
XN
(当有围裙照明时选用)
10
C8:05 5
C8:07
输出(红色) CM 1
信号增益(绿色)
Output NO 3
7 C8:07
NC 4
C8:11 6
C8:13
C8:13
8
0
10
CH1
C8:12 9
C8:06 11
0
10
CH2
Note: 1、LT-L、LT-R: (TX TP5); 2、LR-L、LR-R: (RX TP5); 3、TECLO( ): (AMP 21 C 500)。
扶梯电气控制部分
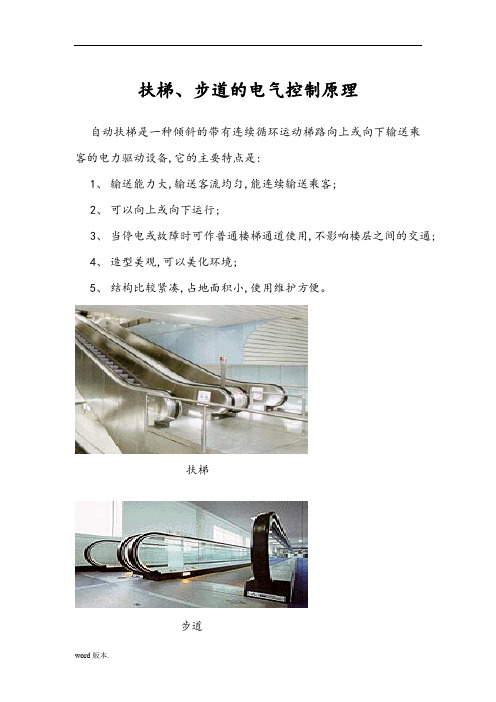
扶梯、步道的电气控制原理自动扶梯是一种倾斜的带有连续循环运动梯路向上或向下输送乘客的电力驱动设备,它的主要特点是:1、输送能力大,输送客流均匀,能连续输送乘客;2、可以向上或向下运行;3、当停电或故障时可作普通楼梯通道使用,不影响楼层之间的交通;4、造型美观,可以美化环境;5、结构比较紧凑,占地面积小,使用维护方便。
扶梯步道扶梯和步道广泛适用于各大型商场、车站、地铁车站、码头、航空港、购物中心等公共场所。
由于自动人行步道与扶梯除了有梯路运行和水平运行的区别外,其他差别不大,因此在本章中不再另行介绍。
在本章中,都以蒂森克虏伯公司生产的FT822型扶梯为例。
扶梯的电气控制部分相对简单,主要有驱动电路、控制电路、安全回路、显示(设置)面板、装饰灯光电路等,下面具体介绍。
一、扶梯的上下行和启动电路。
1、扶梯的上下方向运行。
从电路中来说,扶梯的上下行的实现就是让电动机的正转、反转。
知识回顾:三相交流异步电动机的工作原理:在定子绕组入三相正弦电流,就会在转子和定子之间产生旋转磁场。
( 根据安培定则或叫右手螺旋定则电生磁的原理) 由于旋转磁场与转子绕组之间有相对运动,则转子绕组切割磁场,在其中产生感生电压.因为转子绕组是闭合的,所以转子导体中便有电流流过。
(根据右手定则) 根据左手定则,通过电流的导体在磁场中要受到力的作用,这样转子就产生了转矩.在转矩的作用下。
定子就沿着旋转磁场的方向旋转起来了。
定子绕组源源不断地从电网中汲取电能经过电磁作用转化为机械能而输出,电动机就连续不断地旋转起来。
可见,要改变电动机的转向,就是改变旋转磁场的方向,只要把通入电动机定子绕组的三相电任意两相对调即可。
扶梯电路中上下行(正反转)的实现:如图1-a所示,k1.1为上方向运行交流接触器,k1.2为下方向运行交流接触器,k1.1工作时三相电源的顺序是U1、V1、W1进入电动机,K1.2工作时,三相电源的顺序是W1、V1、U1进入电动机,这样就改变了通入定子绕组的三相电源的相序,即改变了定子绕组同转子之间的旋转磁场方向,电动机就由正转变反转或上行变下行了。
自动扶梯的结构原理
自动扶梯的结构原理
自动扶梯,作为现代城市中常见的交通工具,其结构原理是怎样的呢?下面我们就来详细了解一下。
首先,自动扶梯的结构主要由步道、扶手、驱动装置和支撑结构组成。
步道通常由金属或者玻璃制成,扶手则位于步道两侧,用于乘客扶持和保持平衡。
驱动装置则是自动扶梯的“心脏”,通常由电动机、链条和轮子组成,通过电动机的驱动使链条转动,从而带动轮子旋转,实现自动扶梯的运行。
支撑结构则是整个自动扶梯的支撑框架,起到支撑和固定作用。
其次,自动扶梯的结构原理是基于轮子和链条的传动原理。
当电动机启动时,链条开始转动,轮子也随之旋转,从而带动步道上的梯级运行。
同时,扶手也随着步道的运行而不断地向上或向下移动,为乘客提供便利的扶持。
整个过程中,驱动装置起到了至关重要的作用,保证了自动扶梯的正常运行。
另外,自动扶梯的结构原理还涉及到安全装置的设计。
为了保障乘客的安全,自动扶梯通常配备有多种安全装置,如紧急停止按钮、防夹手装置、超载保护装置等。
这些安全装置能够在紧急情况下及时停止自动扶梯的运行,避免事故的发生,保障乘客的安全。
最后,自动扶梯的结构原理也需要考虑到维护保养的问题。
定期的维护保养对于自动扶梯的正常运行至关重要,只有保持良好的状态,才能确保自动扶梯的安全性和可靠性。
总的来说,自动扶梯的结构原理是基于轮子和链条的传动原理,通过驱动装置的作用实现步道和扶手的运行,同时配备有多种安全装置,保障乘客的安全,而定期的维护保养也是确保自动扶梯正常运行的重要环节。
希望通过本文的介绍,能够让大家对自动扶梯的结构原理有一个更加深入的了解。
自动扶梯的结构和原理

· 一般要求水平段的长度最少不小于800;即至少 2个梯级
· 当H≥6m 或 V≥0.5m/s 时要求水平段至少为1200;
即至少3级
6、运载能力:
Q = V·m·β·3600/0.4
m --- 每梯级站立人数与梯级宽度有关
β--- 满载系数 β= 0.62-V
按运载能力不同分为:普通型、公共交通型 ;
造成设备的损坏因此必须在损坏的梯级到达梳齿前
使电梯停止
本装置由撞杆与安全开关组成
安装于上、下梳齿前规定的工作制动器最大制停距离之外;
6、围裙板异物保护装置
作用:
1为防止异物插入梯级与围裙板之间的间隙造成对人员伤害;
2防止梯级跑偏与梳齿错位造成设备的损坏;
在上、下水平段围裙板的背面装有安全开关
三扶手装置
1、扶手装置的作用:
1是人员站立位置的防护栏;
2是保持人体上身的速度与梯级的速度一致;
2、扶手带的运行
依靠摩擦传动有两种:直线压带式 和 园弧压带式;
3、保证扶手的防护作用:
扶手的高度距踏板面不小于900不大于1100;
玻璃护壁板---采用厚度不小于 6 的钢化玻璃
玻璃间隙不大于4;
二梯路
梯路是自动扶梯的输送线路
它主要包括:梯级与梯级链;导轨;上下转向壁;
1、梯路组成:
分为上分支和下分支; 上分支为工作分支
上曲线段 上分支
下分支为非工作分支;
上分支由:倾斜直线段;
上下曲线段; 上下水平段;
直线段
上下园弧段组成;
梯级链 张紧轮
下分支
上水平段 上园弧段
二梯路
三自动扶梯的主要潜在危险
1、传送带的整体结构是敞开的 周围的环境容易造成伤害; 2、运动部件的间隙对人体的夹持; 3、对人体的施力方向与人的重力方向不一致 容易使人倾倒; 扶手带的线速度必须与梯级相同或略大; 4、传动链的断裂; 包括传动链、梯级链、扶手带的断裂;
扶梯工作原理

扶梯工作原理
扶梯是一种常见的垂直交通工具,其工作原理可以简要概括为以下几个步骤:
1. 电机驱动:扶梯的运行离不开电力,内置电机是扶梯的动力源。
电机通过传动系统将动力传递给链条或带条。
2. 链条或带条:扶梯通常使用链条或带条来传递动力。
链条和带条上装有多个梯级,扶梯乘客可以踏上这些梯级进行乘坐。
3. 大轮与小轮:扶梯的两端分别装有大轮和小轮。
这些轮子用于承载链条或带条,并通过摩擦力传递扭矩,驱动链条或带条的运动。
4. 扶梯的循环:当电机启动后,大轮和小轮开始旋转,带动链条或带条进行连续的交替运动。
平行于扶梯行进方向的链条或带条上的梯级在大轮和小轮的作用下将扶梯乘客从一楼运送到目的楼层。
5. 踏步装置:扶梯的链条或带条上的梯级由一系列形状特殊、安全可靠的踏步组成。
这些踏步通常是有刻槽或齿轮的,以确保乘客在行进过程中具有足够的摩擦力,从而为乘客提供稳定的踏板平台。
总体而言,扶梯的工作原理依赖于电机的驱动,链条或带条的传递运动,以及大轮和小轮的作用力。
通过这些步骤,扶梯能够实现方便快捷的垂直交通。
简述自动扶梯的原理

自动扶梯是一种用于人员运输的垂直交通设备,通常用于连接楼层之间。
它通过循环运行的链条或带轮来传递运动力,使乘客能够轻松地上下移动。
以下是自动扶梯的基本原理:
扶梯结构:自动扶梯由一个倾斜的连续金属梯级链条或带轮组成,梯级上覆盖着橡胶或金属踏板。
通常有两个平行运行的链条或带轮,一个用于上行,一个用于下行。
驱动系统:自动扶梯的驱动系统位于扶梯的底部或顶部。
它通常由电动机、减速机和链条或带轮传动组成。
电动机通过减速机驱动链条或带轮的旋转,从而带动整个扶梯运行。
扶手和栏杆:自动扶梯的两侧通常配备有扶手和栏杆,以提供乘客额外的支持和安全保护。
安全系统:自动扶梯还配备了多种安全系统,以确保乘客的安全。
这些系统包括速度监控、防滑装置、紧急停机按钮、防夹手装置等。
当自动扶梯启动时,电动机开始运转,通过传动系统将动力传递给链条或带轮。
链条或带轮的旋转使扶梯的梯级连续运动,上升或下降。
乘客站在梯级上,随着扶梯的运行,他们可以轻松地上下移动。
同时,乘客可以抓住扶手或栏杆以保持平衡和稳定。
自动扶梯的设计和运行是为了提供高效、安全和便捷的垂直交通。
在使用自动扶梯时,乘客应注意站稳,并遵守安全指示和警示。
扶梯电气控制部分

扶梯、步道的电气控制原理自动扶梯是一种倾斜的带有连续循环运动梯路向上或向下输送乘客的电力驱动设备,它的主要特点是:1、输送能力大,输送客流均匀,能连续输送乘客;2、可以向上或向下运行;3、当停电或故障时可作普通楼梯通道使用,不影响楼层之间的交通;4、造型美观,可以美化环境;5、结构比较紧凑,占地面积小,使用维护方便。
扶梯步道扶梯和步道广泛适用于各大型商场、车站、地铁车站、码头、航空港、购物中心等公共场所。
由于自动人行步道与扶梯除了有梯路运行和水平运行的区别外,其他差别不大,因此在本章中不再另行介绍。
在本章中,都以蒂森克虏伯公司生产的FT822型扶梯为例。
扶梯的电气控制部分相对简单,主要有驱动电路、控制电路、安全回路、显示(设置)面板、装饰灯光电路等,下面具体介绍。
一、扶梯的上下行和启动电路。
1、扶梯的上下方向运行。
从电路中来说,扶梯的上下行的实现就是让电动机的正转、反转。
知识回顾:三相交流异步电动机的工作原理:在定子绕组中通入三相正弦电流,就会在转子和定子之间产生旋转磁场。
( 根据安培定则或叫右手螺旋定则电生磁的原理) 由于旋转磁场与转子绕组之间有相对运动,则转子绕组切割磁场,在其中产生感生电压.因为转子绕组是闭合的,所以转子导体中便有电流流过。
(根据右手定则) 根据左手定则,通过电流的导体在磁场中要受到力的作用,这样转子就产生了转矩.在转矩的作用下。
定子就沿着旋转磁场的方向旋转起来了。
定子绕组源源不断地从电网中汲取电能经过电磁作用转化为机械能而输出,电动机就连续不断地旋转起来。
可见,要改变电动机的转向,就是改变旋转磁场的方向,只要把通入电动机定子绕组的三相电任意两相对调即可。
扶梯电路中上下行(正反转)的实现:如图1-a所示,k1.1为上方向运行交流接触器,k1.2为下方向运行交流接触器,k1.1工作时三相电源的顺序是U1、V1、W1进入电动机,K1.2工作时,三相电源的顺序是W1、V1、U1进入电动机,这样就改变了通入定子绕组的三相电源的相序,即改变了定子绕组同转子之间的旋转磁场方向,电动机就由正转变反转或上行变下行了。
自动扶梯的结构和原理完整版本

1、提升高度:
小高度—6米以下;
中高度--- 6 ~ 20 米;
大高度---- 大于20 米;
2、倾斜角:
标准为 30 ° ;
当H ≤ 6m V≤0.5m/s 时 :倾角可≤ 35°;
当停梯时作楼梯使用,倾角可为:27.3°;
3、运行速度:
当倾角大于30°时,V≤0.5m/s;
当倾角 ≤30°时,V≤0.75m/s;
三、自动扶梯基本结构
(一)驱动装置(主机)
1)作用:提供梯级和扶手带运行的动力;
2)驱动位置:
端部驱动(采用链传动)、
中间驱动(采用齿条传动)
3)结构:包括:电动机、减速器、制动器、
传动链、驱动主轴;
A、电动机
·一般采用深槽或者双鼠笼异步电动机,具有较大的起动转矩
· 为降低起动电流,采用星—三角起动,无需调速;
讲四个内容:
1)自动扶梯工作原理 2)自动扶梯主要参数
3)自动扶梯基本结构 4)自动扶梯的检测
一、自动扶梯工作原理
(一)自动扶梯传动原理
1、自动扶梯是由两组传送带组成:
一组是链传送带---由梯级链拖动的一串的梯级;
一组是磨擦传送带---由传送胶带组成的扶手带;
2、两个传送带都由同一个“驱动主轴”拖动;
· 一般要求水平段的长度最少不小于800;(即至少 2个梯级)
· 当H≥6m 或 V≥0.5m/s 时,要求水平段至少为1200;
(即至少3级)
6、运载能力:
Q = V·m·β·3600/0.4
m --- 每梯级站立人数(与梯级宽度有关)
β--- 满载系数 β= 0.6(2-V)
按运载能力不同,分为:普通型、公共交通型 ;
扶梯电气控制部分.

扶梯、步道的电气控制原理自动扶梯是一种倾斜的带有连续循环运动梯路向上或向下输送乘客的电力驱动设备,它的主要特点是:1、输送能力大,输送客流均匀,能连续输送乘客;2、可以向上或向下运行;3、当停电或故障时可作普通楼梯通道使用,不影响楼层之间的交通;4、造型美观,可以美化环境;5、结构比较紧凑,占地面积小,使用维护方便。
扶梯步道扶梯和步道广泛适用于各大型商场、车站、地铁车站、码头、航空港、购物中心等公共场所。
由于自动人行步道与扶梯除了有梯路运行和水平运行的区别外,其他差别不大,因此在本章中不再另行介绍。
在本章中,都以蒂森克虏伯公司生产的FT822型扶梯为例。
扶梯的电气控制部分相对简单,主要有驱动电路、控制电路、安全回路、显示(设置)面板、装饰灯光电路等,下面具体介绍。
一、扶梯的上下行和启动电路。
1、扶梯的上下方向运行。
从电路中来说,扶梯的上下行的实现就是让电动机的正转、反转。
知识回顾:三相交流异步电动机的工作原理:在定子绕组中通入三相正弦电流,就会在转子和定子之间产生旋转磁场。
( 根据安培定则或叫右手螺旋定则电生磁的原理) 由于旋转磁场与转子绕组之间有相对运动,则转子绕组切割磁场,在其中产生感生电压.因为转子绕组是闭合的,所以转子导体中便有电流流过。
(根据右手定则) 根据左手定则,通过电流的导体在磁场中要受到力的作用,这样转子就产生了转矩.在转矩的作用下。
定子就沿着旋转磁场的方向旋转起来了。
定子绕组源源不断地从电网中汲取电能经过电磁作用转化为机械能而输出,电动机就连续不断地旋转起来。
可见,要改变电动机的转向,就是改变旋转磁场的方向,只要把通入电动机定子绕组的三相电任意两相对调即可。
扶梯电路中上下行(正反转)的实现:如图1-a所示,k1.1为上方向运行交流接触器,k1.2为下方向运行交流接触器,k1.1工作时三相电源的顺序是U1、V1、W1进入电动机,K1.2工作时,三相电源的顺序是W1、V1、U1进入电动机,这样就改变了通入定子绕组的三相电源的相序,即改变了定子绕组同转子之间的旋转磁场方向,电动机就由正转变反转或上行变下行了。
自动扶梯原理

自动扶梯原理自动扶梯是一种方便人们出行的机械设备,它的原理是通过电动机驱动链条或带子,使扶梯的步骤不断地向上或向下运动,从而实现人们的上下交通。
自动扶梯的原理非常简单,但是它的设计和制造却需要高度的技术和精密的工艺。
自动扶梯的主要部件包括电动机、链条或带子、步骤、扶手、支架等。
电动机是自动扶梯的动力源,它通过传动链条或带子,使步骤不断地向上或向下运动。
链条或带子是自动扶梯的传动装置,它将电动机的动力传递给步骤,使其运动。
步骤是自动扶梯的主体部分,它由铝合金或不锈钢制成,具有耐磨、耐腐蚀、耐高温等特点。
扶手是自动扶梯的辅助部件,它可以帮助人们保持平衡,防止摔倒。
支架是自动扶梯的支撑部件,它可以支撑整个自动扶梯的重量,保证其稳定运行。
自动扶梯的工作原理非常简单,当人们站在自动扶梯的步骤上时,电动机会启动,链条或带子开始运动,步骤也开始向上或向下运动。
当人们到达目的地时,可以通过扶手或支架离开自动扶梯。
自动扶梯的运行速度通常在0.5米/秒到1.0米/秒之间,可以根据需要进行调整。
自动扶梯的优点是方便快捷、安全可靠、节省空间等。
它可以帮助人们快速地到达目的地,减少人们的步行时间,节省人们的时间和精力。
同时,自动扶梯的设计和制造也非常注重安全性,它可以通过多种安全装置来保证人们的安全。
例如,自动扶梯上装有紧急停车按钮、安全防护栏、安全传感器等,可以在紧急情况下及时停止自动扶梯的运行,保护人们的安全。
自动扶梯是一种非常实用的机械设备,它的原理简单、安全可靠、方便快捷,可以帮助人们快速地到达目的地,提高人们的出行效率。
随着科技的不断发展,自动扶梯的设计和制造也将不断地得到改进和完善,为人们的出行带来更多的便利和舒适。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7.DZZ1 DZZ2是安装在电磁铁内两组相对的线圈。 其匝数分别为7000匝,单组R=400Ω+20。
8.QL1启动后全波转半波二极管 9.QL2全波桥式整流器 1000V/35A 10.RZ1、RZ2、RZ3 降压限流电阻 11.JBZF 辅助制动接触器 12.RC 浪涌吸收器
DZT-H(F)抱闸电磁铁 BK1
下部电缆布置图
扶手围裙照明
检修手柄和航空插头
电缆
安全回路开关
方向允许按钮 (公共按钮) 上行按钮
下行按钮
检修手柄
方向允许按钮 (公共按钮)
检修插头
34
下行按钮 34
1 3
6 DN
2
5 4
UP
7
安全回路开关
上行按钮 34
34
备注:电缆长度为自动扶梯 20米,自动人行道 30米。
正常插头
12
3
4
5
主回路
制动单元与制动电阻(1)
制动单元与制动电阻(2)
制动单元与制动电阻(3)
序号 GD
1
0v
2
0v
3
0v
4
0v
5
0v
6
0v
7
0v
8
24v
9
24v
10
24v
11
24v
12
24v
13
24v
七段码故障指示说明
GC
GB
GA 故障编码显示故障名称
பைடு நூலகம்
0v
0v
24v
1
主机测速故障
0v
24v
0v
2 左扶手测速故障
七段码
七段码
LCD 七段码 LCD
VVVF
星三角 VVVF 星三角 VVVF 星三角 VVVF
系统总图
ECS-100型电控系统构成
上机房
? 主控箱 ? 主机 ? 抱闸 ? 测速探头 ? 抱闸检测 ? 驱动链开关 ? 梳齿开关 ? 扶手入口开关 ? 踏板坠落(选配) ? 加油电机(选配) ? 乘客检测(选配)
24v
0v
F 踏板坠落故障
表一 序号
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
表二 序号
1 2 3 4 5 6 7
FCMCB X0 X1 X2 X3 X4 X5 X6 X7 X8 X9
X10 X11 X12 X13 X14 X15 X16 X17 X18 X19 X20 X21 X22 X23
UP
6
7
安全回路
光电节能立柱
上机房插件示意图
TA 24+
I0
101
102
301
302
K0
Xa
Xb
XL
XN
SI
XI
R
S
T
0
G
U21
V21
W21
U22
V22
W22
TC 用于 Y- △ 系统
U3
TD U1
V1
W1
U2
TD 用于 VVVF 变频系统
V3
W3
V2
W2
下机房插件示意图
TE LP1
XN
(当有围裙照明、扶手照明时选用 )
液晶故障指示说明
常开 (0V) 时 故障
信号无 信号无
手动 信号无
故障 信号无
停止 故障 故障 故障 故障 故障 故障 故障 故障 故障 故障 故障 故障 故障 故障 故障 故障
X2 0V 24V 24V 0V 0V 24V 24V
常闭 (24V) 时 正常
信号有 信号有
自动 检修 安全 加油 运行 正常 正常 正常 正常 正常 正常 正常 正常 正常 正常 正常 正常 正常 正常 正常 正常
插脚
X0 0V 0V 0V 0V 0V 0V 0V
名称 正常 上行 下行 自动 检修 安全 加油 运行 上左梳齿 上右梳齿 上左扶手 上右扶手 上梯级防跳 上梯级下陷 上踏板坠落 下左梳齿 下右梳齿 下左扶手 下右扶手 下梯级防跳 下梯级下陷 左曳引链断 右曳引链断 下踏板坠落
X3 0V 0V 0V 24V 24V 24V 24V
安装服务部培训资料
第一部分
自动扶梯(人行道)电气原理
OMRON PLC 控制的自动扶梯、自动人行道
ECS-100系列电控系统
型号
ECS-IV ECS-V ECS-99 ECS-2000 ECS-100
PLC
三菱 三菱 三菱 三菱 欧姆龙
防护等级 故障显示 驱动方式
IP20
七段码
星三角
IP20 IP54 IP20,IP54 IP20,IP54
梯路
? 梯级下陷(上下) ? 围裙(上下左右) ? 梯级间隙照明 ? 钥匙开关(上下) ? 停止按钮(上下) ? 故障显示器 ? 梳齿照明(选配) ? 扶手测速(选配) ? 方向指示(选配)
下机房
? 曳引链开关 ? 梳齿开关 ? 扶手入口开关 ? 踏板坠落(选配) ? 乘客检测(选配)
上部电缆布置图
AC220V ( +15% ) 50HZ / 60HZ
JBZF 12
RZ1 BK2
RZ2
RZ3
O32
N
技术说明:
1.输入额定电压AC220V允许波动+15%。
2.额定电流I=0.25A。 3.电磁铁是连续工作制,当温度升到
临介点时其推力≥255N。 4.电磁铁线圈绝缘等级为B级。 5.电磁铁防护等级为IP55。 6.RD 熔断器。
L 红
N黄
技术说明:
1.输入额定电压AC220V允许波动+15%。 2.DZZ1 DZZ2是安装在电磁铁内两组相对的线圈。
其匝数分别为7000匝,单组R=400Ω+20。 3.QL全波桥式整流器 1000V/35A(控制箱内) 4.额定电流I=0.25A。 5.电磁铁是连续工作制,当温度升到临介点时其推力≥255N。 6.电磁铁线圈绝缘等级为B级。 7.电磁铁防护等级为IP55。
备注
当 X0 为 0V 时 , 故障编码见 表二
X1 24V
0V 24V
0V 24V
0V 24V
故障编码 1 2 3 4 5 6 7
故障名称 主机测速故障
左扶手测速故障 右扶手测速故障
梯级遗失故障 驱动链断链
触点粘连故障 抱闸打开故障
小推力抱闸制动系统
U32
AC220V(+15%)/50HZ/60HZ O32
0v
24v
24v
3 右扶手测速故障
24v
0v
0v
4
梯级遗失故障
24v
0v
24v
5 驱动链断链故障
24v
24v
0v
6
触点粘连故障
24v
24v
24v
7
抱闸打开故障
0v
0v
0
8
上梳齿故障
0v
0v
24v
9
下梳齿故障
0v
24v
0v
A
曳引链故障
0v
24v
24v
C 进出口扶手故障
24v
0v
24v
E 梯级下陷故障
24v
DZT-L (F)小推力电磁铁 BK1 DZZ1
外圈φ 0.29mm 3500 匝 内圈φ 0.27mm 3500 匝
DZZ2 BK2
内圈φ 0.27mm 3500 匝 外圈φ 0.29mm 3500 匝
大推力抱闸制动系统
BZX(F)抱闸控制箱
BK1 JBZF
U32
L
RD
Q L1
Q L2
12
R1 R2 RC
DZZ1 DZZ2 BK2
CC(F) 抱闸控制箱中