毕业设计-黑白棋子的识别与分拣输送装置的设计
【最新】黑白棋实验报告word版本 (7页)

本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==黑白棋实验报告篇一:黑白棋程序设计实验报告C++版海南大学课程论文课程名称:数据结构课程设计题目名称:黑白棋姓名:学号:评阅教师:201X年 12月 17 日目录一、黑白棋简介 (2)二、程序设计思路及实现界面图 (3)三、程序设计算法性能分析 (6)四、实验总结 (6)五、实验代码 (7)一、黑白棋简介黑白棋,又叫反棋(Reversi)、奥赛罗棋(Othello),苹果棋,翻转棋。
黑白棋的棋子和围棋类似。
但它的下法与围棋的很不相同。
黑白棋是由黑方和白方两人进行的益智游戏。
棋盘为N×N方格,黑白棋总共使用N个棋子,每个棋子分正反两面,分别是黑色和白色。
轮到一方下棋时,必须把棋下在与对方棋子相邻的空位上,要求所下的棋子和原有的已方棋子夹住对方的至少一个棋子(横竖斜夹均可),然后把被夹住的子变成己方的颜色(也叫吃子)。
下棋过程中,任何棋子既不会从棋盘上拿走,也不会从一个格子移到另一个格子,吃子时,不会发生连锁反应,吃进的棋子不能再夹吃其他的子。
当双方都无棋可下,或者方格全部占满后,棋局结束,子多的一方为胜方。
2二、程序设计思路及游戏实现界面1、设计初始化棋盘函数2、复制棋盘函数3、显示棋盘函数4、选择下棋类型4、计算可落子的位置个数,及该位置落子后翻过的棋子的个数5、设置棋子的稳定性(计算得分的依据),空白处除外6、评价棋手得分游戏开始选择类型和棋子:打印棋盘棋手开始下棋输入下棋的位置:游戏结束,统计棋数并分出胜负:篇二:C语言-黑白棋实验报告福建工程学院计算机与信息科学系实验报告12345篇三:黑白棋课程设计报告惠州经济职业技术学院计算机专业课程设计报告课题名称:关于黑白棋游戏的设计专业:班级:组长: XXX小组成员:二O一O年十二月摘要中国最早出现黑白棋是在80年代的任天堂游戏机和苹果II个人电脑游戏里,但从那时一直玩到现在的人已经寥寥可数了,我们只能说,从那时起,中国第一次出现了黑白棋;然后就是1990年的Windows 3.0的推出,当时Windows自带的游戏就是黑白棋,由于当时电脑还比较少,没等到黑白棋传开,Windows 3.1推出,把自带游戏换成现在大家见到的踩地雷和接龙;让大量人认识黑白棋的是文曲星,文曲星的黑白棋棋力很低,一个人下了几盘以后就可以轻易把它打败,棋力之低简直可以说是误人子弟的地步,让人一叶障目,不见森林,以为黑白棋不过尔尔;在90年代中期流行的任天堂Gameboy当中也有一款黑白棋游戏,棋力甚为不错,比起以上提及的游戏强很多。
基于PLC控制的物料分拣装置毕业设计

盐城纺织职业技术学院毕业设计(论文)基于PLC控制的物料分拣装置班级电气1012专业电气工程及其自动化所在系机电工程系指导老师目录摘要 (3)ABSTRACT (4)绪论 (5)第1章材料分拣装置结构及总体设计 (6)1.1 材料分拣装置工作过程概述 (6)1.1.1分拣单元的结构组成 (7)1.2 系统的技术指标 (7)1.3 系统的设计要求 (7)1.3.1 功能要求 (8)1.3.2 系统的控制要求 (8)第2章控制系统的硬件设计 (8)2.1 系统的硬件结构 (8)2.2 系统关键技术 (9)2.2.1 确定I/ O 点数 (9)2.3检测元件与执行装置的选择 (11)2.3.1 光电编码器 (11)2.3.2 光电传感器 (13)2.3.3 光纤传感器 (14)2.3.4电感接近开关 (16)2.3.5磁性开关 (17)2.3.6通用变频器驱动装置 (18)2.3.7电磁阀组和气动控制回路 (21)第3章控制系统的软件设计 (21)3.1 控制系统流程图设计 (22)3.2 控制系统程序梯形图设计 (23)第4章控制系统的调试 (30)4.1 硬件调试 (30)4.2 软件调试 (30)4.3 整体调试 (30)结论 (31)致谢 (32)参考文献 (33)摘要本论文阐述了利用西门子生产的一种YL335B小型物料分拣,结合气动、传感器和位置控制等技术,并运用梯形图编程,实现对铝块及白色、黑色共三种材料的自动分拣。
该系统的通用性极强,可靠性好,程序开发简单,可适应进行材料分拣生产线的需求。
目前自动分拣已逐渐成为主流,因为自动分拣是从货物进入分拣系统送到指定的分配位置为止,都是按照人们的指令靠自动分拣装置来完成的。
这种装置是由接受分拣指示情报的控制装置、计算机网络,把到达分拣位置的货物送到别处的的搬送装置。
由于全部采用机械自动作业,因此,分拣处理能力较大,分拣分类数量也较多。
关键词:PLC,材料分拣,梯形图编程ABSTRACTThe paper explained how to combine the mini YL-335B that was made by Siemens with pneumatic sensor and position control technology and program with the ladder—shape figure, designing the automatic system that sorts out aluminum 、black plastics and whrit plastics . The flexibility of this system is fine, the reliability is also excellent and programming is easy. It adapts to elasticity production line for materials sorting.At present the automatic sort gradually has become the mainstream, because the automatic sort is enters the assignment position from the cargo which the sort system delivers assigns up to, all is defers to people's instruction to depend on the automatic sorting equipment to completed. This kind of equipment is by accepts the sort instruction information the control device, the computer network elsewhere, arrives sorts the position the cargo delivers moves to delivers. Because uses the machinery automatic work completely, therefore, sort handling ability is big, sort classification quantity are also many.Key Words :PLC,Automatic Sorting System,The Ladder-shape Program绪论分拣是把很多货物按品种从不同的地点和单位分配到所设置的场地的作业。
JAVA黑白棋 毕业设计论文
1.3 黑白棋研究意义............................................................................................................. - 4 -
第 2 章 黑白棋游戏简介及需求分析.......................................................................................- 6 -
4.1 系统测试....................................................................................................................... - 15 4.1.1 测试方法................................................................................................................- 15 4.1.2 测试用例及结果....................................................................................................- 15 4.1.3 游戏的发布.............................................................................................................- 16 -
黑白棋子分拣机器人

黑白棋子分拣机器人作者:刘成成来源:《科技创新与品牌》2014年第07期时下,围棋和五子棋已成为许多中老年人休闲生活的重要组成部分,然而由于年岁大、眼神不好等原因,分捡棋子耗时长、精力体力消耗大。
为此,第二实验小学的陈天琦同学特地邀请同学殷明德共同研制了一个可以分拣棋子的小机器人,以使长辈们的休闲生活更加轻松、惬意。
该机器人的设计分为棋、转盘和三个挡板几个基本组成部分,由直流电机带动转盘旋转的同时三个挡板跟着旋转,由于重力的作用和管道口的尺寸设计使每次只有一个围棋子落到管道中,由此攻克了技术难点—棋子逐个分别落下来。
接着,运用步进电机带动传动装置左右移动以实现对棋子的接收,进而由光电传感器将信号传递给单片机进行颜色判断。
棋子落到挡板后,通过旋转将检测完的黑白棋子分别装到特定的两个容器中,若检测到没有棋子或者是有黑棋子,挡板往一个方向旋转;若检测到有白棋子,挡板往另一个方向旋转,从而实现了对黑白棋子的分拣功能。
一、工作原理及特点1.分选转盘利用围棋薄而圆的外形特点,使棋子在重力作用下逐个分别下滑到管道中,整齐排列等待分拣;2.步进电机准确地将棋子推送到光电传感器所在位置进行检测;3.光电传感器准确地判断棋子的颜色并通过程序控制可旋转的挡板,将黑白棋子进行分拣。
二、构造及工作流程1.主要构件(1)主体结构部分:转盘、连接管道、棋子分拣部分和收纳盒;(2)棋子分拣判断部分:一个STC89C52单片机、两个5V步进电机、一个步进电机驱动模块ULN2003、一个减速直流电机、一个5V电源。
2.基本组成及工作流程(1)棋子分选转盘选用直径22毫米,高度5.9毫米的云子围棋,根据这些参数来设计棋子管道的宽度和高度。
在分棋转盘上设置三个挡板,与直流电机带动转盘旋转一同旋转。
由于重力的作用和管道口的尺寸设计,每次只有一个围棋子落到管道中,从而实现了棋子逐个下落。
(2)黑白棋子检测部分检测部分采用可以识别黑白颜色的红外光电传感器,并在程序中进行了相应的处理,把没有棋子和有黑棋子这两种状态视为一种默认的状态,把有白棋子这种状态视为工作状态,当有白棋子到来的时候,触发中断,即可实现对黑白棋子的区分。
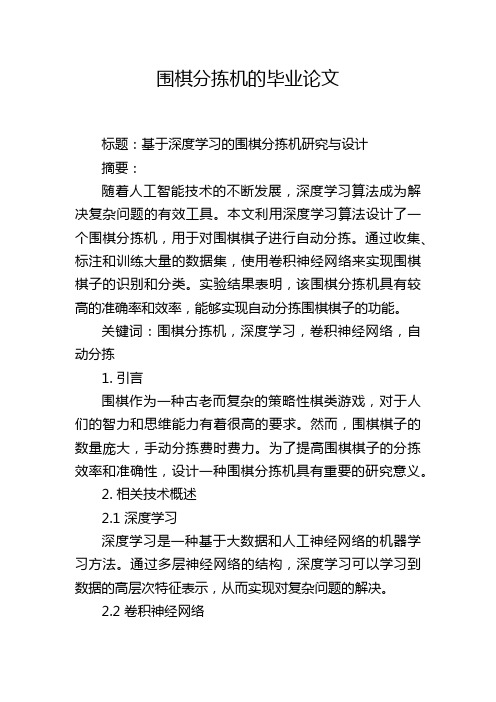
黑白棋子分拣机器人

的宽度和高度 。在分棋转盘上设置三个挡
(4)利用液晶显示屏 单片机进 行计
一 、 工作原理及特点
板 ,与直流电机带动转盘旋转一 同旋转。 数功 能,并统计棋子个数 ,避免丢子或少
1.分选 转盘 利用围棋 薄而圆的外形 由于重力的作用和管道 口的尺寸设计,每 子的现象产生。
特点 ,使棋子在 重力作用下逐个分别下滑 次只有一个围棋子落 到管 道中,从而实现
(1)棋子分选转盘
(3)利用 可 以分 别 向左 、右 旋 转 的 挡
选用直径22毫米 ,高度5.9毫米 的云 板 ,实现黑 白棋子的分拣 ,并根据分 拣结
若检测到有白棋子,挡板往另一个方向旋 子 围棋 ,根据 这些 参数 来设 计棋子 管道 果,显示每种棋子的数量,
转,从而实现了对黑 白棋子的分拣功能。
1.科 学性
术 子 分 拣 判 断 部 分 :一 个
(1)利用力学原理,设计有 落差 的外
用步进电机带动传动装置左右移动以实现 STC89C52单片机 、两个5V步进 电机、一 形结构和步进电机推动 ,实现棋子准确移
对棋子的接收,进而由光电传感 器将信号 个步进电机驱动模块ULN2003、一个减速 动I
候 ,挡板往一个方向旋转 ;当检测到有白棋
转盘旋转 的同时三个挡板跟着旋转 ,由于
1.主要构件
子的 时候 ,挡板往 另一 个方 向旋转 。
重力的作用和管道 口的尺寸设计使每 次只
(1)主体结 构 部分 :转盘 、连接 管
三、科 学性 和 实用 性
有一个围棋子落到管道中,由此攻克了技 道、棋子分拣部分和收纳盒,
2.实用性
到管道中,整齐排列等待分拣,
C语言课程设计报告--黑白棋

C语言程序设计课程设计题目:黑白棋课程设计(报告)任务及评语目录第1章课程设计的目的与要求 (1)1.1 课程设计目的 (1)1.2 课程设计的实验环境 (1)1.3 课程设计的预备知识 (1)1.4 课程设计要求 (1)第2章课程设计内容 (2)2.1程序功能介绍 (2)2.2程序整体设计说明 (2)2.2.1设计思路 (2)2.2.2数据结构设计及用法说明 (3)2.2.3程序结构(流程图) (4)2.2.4各模块的功能及程序说明 (6)2.2.5程序结果 (6)2.3程序源代码及注释 (6)第3章课程设计总结 (16)参考资料 (17)第1章课程设计的目的与要求1.1 课程设计目的本课程设计是计算机科学与技术专业重要的实践性环节之一,是在学生学习完《程序设计语言(C)》课程后进行的一次全面的综合练习。
本课程设计的目的和任务:1. 巩固和加深学生对C语言课程的基本知识的理解和掌握2. 掌握C语言编程和程序调试的基本技能3. 利用C语言进行基本的软件设计4. 掌握书写程序设计说明文档的能力5. 提高运用C语言解决实际问题的能力1.2 课程设计的实验环境硬件要求能运行Windows 2000/XP操作系统的微机系统。
C语言程序设计及相应的开发环境。
1.3 课程设计的预备知识熟悉C语言及C语言开发工具。
1.4 课程设计要求1. 分析课程设计题目的要求2. 写出详细设计说明3. 编写程序代码,调试程序使其能正确运行4. 设计完成的软件要便于操作和使用5. 设计完成后提交课程设计报告第2章课程设计内容2.1程序功能介绍本游戏只有在可以吃到对方棋子的方格里落子吃子规则:采用夹吃的原则,左图用红色标记的是黑方可落子的位置。
当黑方落子之后,则夹在两黑子中间的白子都将变为黑子。
右图是落子后的棋盘布局,蓝色标记的是白方可落子的位置。
夹子的方向包含:水平、竖直、斜对角。
1.点击“新游戏”,将从新初始化棋局。
2.打开游戏存档,默认是.bwc文件3.保存当前游戏,默认扩展名为.bwc4.后退一步,即悔棋5.前进一步,只有在前面的操作存在后退的基础上,该按钮才有效。
黑白棋游戏设计与开发 毕业论文 (2)

黑白棋游戏设计与开发系院名称指导老师学生姓名学生学号专业、班级提交时间毕业论文任务书毕业论文开题报告黑白棋游戏设计摘要:本次毕业设计是基于c++语言,在vs2005平台上进行的单机版游戏开发,通过本次游戏的开发,有益于进一步掌握对c++语言的应用,加深对计算机游戏的制作理念的理解,对我今后参与更加复杂的游戏项目积累宝贵的经验!黑白棋(Reversi、Othello),也叫苹果棋,翻转棋,是一个经典的策略性游戏。
黑白棋是19世纪末英国人发明的。
直到上个世纪70年代一个日本人将其发展,借用莎士比亚名剧奥赛罗(Othello)为这个游戏重新命名,也就是现在大家玩的黑白棋。
为何借用莎士比亚名剧呢?是因为奥赛罗是莎士比亚一个名剧的男主角。
他是一个黑人,妻子是白人,因受小人挑拨,怀疑妻子不忠一直情海翻波,最终亲手把妻子杀死。
后来真相大白,奥赛罗懊悔不已,自杀而死。
黑白棋就是借用这个黑人白人斗争的故事而命名。
关键词:c++编程;windows编程;MFC技术论文目录第一章引言 (1)1.1 c++简介 (1)1.2 window编程介绍 (1)1.3 Visual studio开发平台简介 (1)第二章毕业业设计的目的及要求 (2)2.1毕业设计的目的 (2)2.2毕业设计的开发环境 (2)2.3毕业设计所需的知识 (2)2.4毕业设计要求 (2)第三章毕业设计的内容 (3)3.1程序功能介绍 (3)3.2程序整体设计说明 (4)3.3程序源代码及注释 (7)第四章结束语 (23)第一章引言1.1 c++语言介绍C++这个词在中国大陆的程序员圈子中通常被读做“C加加”,而西方的程序员通常读做“C plus plus”,“CPP”。
它是一种使用非常广泛的计算机编程语言。
C++是一种静态数据类型检查的,支持多重编程范式的通用程序设计语言。
它支持过程化程序设计、数据抽象、面向对象程序设计、制作图标等等泛型程序设计等多种程序设计风格。
毕业设计-黑白棋子的识别与分拣输送装置的设计

高等教育自学考试本科毕业论文黑白棋子识别与分拣输送装置的设计考生姓名:李红亮准考证号: 011808101277 专业层次:本科院(系):机械与动力工程学院指导教师:唐建敏职称:讲师重庆科技学院二O一O年月日高等教育自学考试本科毕业论文黑白棋子识别与分拣输送装置的设计考生姓名:李红亮准考证号: 011808101277专业层次:本科指导教师:***院(系):机械与动力工程学院重庆科技学院二O一O年月日摘要物料的自动分拣及输送系统在汽车制造业、物流业及邮政系统等多个行业中广泛应用。
本设计为黑白棋子的识别与分拣输送装置设计,在自动上料机构的作用下,待分拣棋子自A地出发,由传输带输送至B地;在B地利用光电传感器进行识别及分拣,由分拣装置将分拣后的黑白棋子分别送至不同的储料箱。
装置的工作节拍用可编程逻辑控制器(PLC)控制。
本文是对整个设计工作较全面的介绍和总结。
关键词:黑白棋子识别;自动分拣输送;可编程逻辑控制器AbstractThe sorting and transportation automatically of raw material is wildly used in motor industry , logistics job and postal service system etc. This scheme introduced the design of the black-and-white chessman identing, sorting and transporting apparatus. At the hands of self-feeding apparatus, the sorting chessman departs from place A to place B through the given transmission line. When the sorting chessman arrives at place B, the sensor will identify and sorting them. And then, different raw material will be send to different box. The device job meter uses programmable logic controller (PLC) to control.This paper is more comprehensive introduction and summing-up for the whole design work.Key words: the black-and-white chessman identing;automatic sorting and transportation; programmable logic controller目录摘要 (I)ABSTRACT (II)1绪论 (1)2方案设计 (3)2.1设计方案一 (3)2.2设计方案二 (3)2.3设计方案三 (4)2.4方案比较 (5)3最终采用方案的总体设计 (6)3.1电动机的选择与校核 (6)3.1.1自动上料装置的电动机选择与校核 (6)3.1.2物料输送装置的电动机选择与校核 (7)3.1.3分拣装置的电动机选择与校核 (7)4机械结构及零部件的设计 (8)4.1装置总体结构设计 (8)4.2装置零部件设计 (9)4.2.1转盘驱动轴的设计 (9)4.2.2摇板传动轴的设计 (10)4.3轴承的选择 (10)4.4联轴器的选择 (11)4.4.1自动上料装置处联轴器的选择 (11)4.4.2物料输送装置处联轴器的选择 (12)4.4.3分拣装置处联轴器的选择 (12)5可编程逻辑控制器(PLC)控制系统的设计 (13)5.1设计要求 (13)5.1.1控制功能 (13)5.1.2控制要求 (13)5.2控制设计 (13)5.2.1控制分析 (13)5.2.2控制程序设计 (13)5.3控制程序语句表 (15)6结论 (16)参考文献 (17)致谢 (18)论文原创性声明1绪论自动分拣系统(Automated Sorting System)是二次大战后在美国、日本的物流中心中广泛采用的一种自动分拣系统,该系统目前已经成为发达国家大中型物流中心不可缺少的一部分。
围棋棋子分离器

围棋棋子分离器
作者:暂无
来源:《发明与创新·小学生》 2019年第11期
山东省青岛市宁夏路第二小学三(2)班陆淬钧
围棋棋手对弈结束后,棋子收纳工作既繁琐又费时,如何解决这个问题呢?我想到学过的磁铁知识,设计了围棋棋子分离器。
设计原理
磁铁同极相斥、异极相吸
作品构造
围棋棋子分离器由磁性折叠棋盘、磁性手持收纳盘、棋子收纳盒、磁性黑棋和磁性白棋构成,磁性折叠棋盘、磁性手持收纳盘、磁性黑棋和磁性白棋上都有磁铁,磁性折叠棋盘与磁性黑棋、磁性手持收纳盘与磁性白棋上的磁铁接触面的磁极各不相同。
使用方法
对弈结束后,将对弈双方的磁性黑棋和磁性白棋放置于磁性折叠棋盘上,然后将磁性手持收纳盘套在手上,在磁性折叠棋盘上方慢慢移动,奇妙的事情发生了:磁性白棋被迅速吸附到磁性手持收纳盘上,磁性折叠棋盘上只剩下磁性黑棋,黑白棋子被成功分离。
最后,将磁性手持收纳盘上的磁性白棋收入白棋盒中,将磁性折叠棋盘上的磁性黑棋收入黑棋盒中,棋子收纳工作完成。
创新点
1.运用简单的磁铁知识设计作品,把枯燥乏味的分棋、收棋工作变得有趣,大大提高了分棋、收棋工作的效率。
2.围棋棋子分离器小巧轻便,方便携带,一定会受到很多爱下围棋的小朋友的喜爱。
可改进的地方
将磁性白棋上的磁铁藏在白棋内,这样人们看不到磁性白棋上的磁铁,分离黑白棋子像变魔术一样神奇。
指导老师彭勇奇。
黑白棋子分拣机工作原理

黑白棋子分拣机工作原理
黑白棋子分拣机的工作原理如下:
1. 感应传感器:黑白棋子分拣机首先使用感应传感器来检测棋子的颜色。
这种传感器可以根据光的反射程度来确定棋子的颜色。
2. 传送带:一条具有可移动托盘的传送带连接到感应传感器之后。
当感应传感器检测到棋子后,传送带会自动将棋子运送到下一步的分拣阶段。
3. 分拣机械臂:分拣机械臂位于传送带的上方,具有夹持棋子的功能。
机械臂通过编程来确定棋子的颜色,并利用夹爪将棋子从传送带上抓起。
4. 图像处理系统:机械臂将抓取的棋子放置在可移动的托盘上,这时会启动一个图像处理系统。
该系统通过摄像头拍摄棋盘上的位置,并识别托盘上棋子的颜色和位置。
5. 分拣装置:基于图像处理系统的信息,分拣装置会计算出下一步棋子应该放置的位置,并将机械臂移动到相应的位置。
然后,机械臂会释放棋子,将其放置在正确的位置上。
6. 重复操作:整个过程将不断重复,直到所有棋子都被正确地分拣和放置在棋盘上。
通过上述步骤,黑白棋子分拣机可以自动地将黑白棋子按照颜色分拣并放置在正确的位置上,实现自动化的分拣过程。
围棋分拣器实践报告(2篇)

第1篇一、引言围棋,作为我国传统的智力游戏,源远流长,深受广大棋友的喜爱。
随着科技的发展,围棋逐渐与现代科技相结合,衍生出许多智能化产品。
围棋分拣器作为其中一种,旨在提高围棋比赛的效率,减少人为操作失误,为棋友提供更好的比赛体验。
本文将详细介绍围棋分拣器的实践过程,包括设计理念、硬件选型、软件编写以及实际应用等方面。
二、设计理念1. 自动化:通过自动化分拣,减少人工操作,提高比赛效率。
2. 准确性:确保分拣过程中棋子无误,避免人为失误。
3. 通用性:适用于不同棋类比赛,具有广泛的应用前景。
4. 便捷性:操作简单,易于维护。
三、硬件选型1. 分拣器主体:采用步进电机驱动,实现棋子的自动分拣。
2. 传感器:选用光电传感器,检测棋子是否到位。
3. 控制器:选用Arduino或树莓派等开源平台,实现分拣过程的控制。
4. 电源:选用可充电锂电池,保证分拣器长时间稳定运行。
四、软件编写1. 主控程序:负责分拣器整体控制,包括电机驱动、传感器检测、棋子分拣等。
2. 通讯程序:实现分拣器与上位机(如电脑、手机等)之间的数据交互。
3. 分拣算法:根据棋类比赛规则,设计分拣算法,确保棋子分拣准确无误。
五、实践过程1. 硬件组装:将步进电机、传感器、控制器等硬件按照设计图纸进行组装,确保各部件连接牢固。
2. 软件调试:编写主控程序、通讯程序和分拣算法,并在控制器上运行调试,确保程序运行稳定。
3. 功能测试:对分拣器进行功能测试,包括棋子分拣、传感器检测、通讯等功能。
4. 应用测试:将分拣器应用于实际比赛中,测试其稳定性和实用性。
六、实际应用1. 比赛场景:在围棋比赛中,将分拣器放置在棋盘一侧,棋手将棋子放入分拣器,分拣器自动将棋子分拣至棋盘对应位置。
2. 优势分析:(1)提高比赛效率:自动化分拣,减少人为操作,使比赛更加流畅。
(2)降低失误率:分拣器准确无误,减少人为失误,保证比赛公平性。
(3)方便维护:分拣器结构简单,易于维护,降低维护成本。
围棋棋子智能分拣机

围棋棋子智能分拣机作者:伦比来源:《发明与创新(中学生)》 2021年第1期河北省唐山市第四十九中学九年级伦比围棋对弈结束后,分拣棋子既耗费大量时间又会打断对局者的思路,影响对弈质量。
现在市场上已有围棋分拣机,但分拣效率低、机械体积大、棋子适应度差,使用不便。
针对上述问题,我设计了围棋棋子智能分拣机,它通过履带传送及光感系统,实现对围棋棋子的自动分拣。
一、设计思路以CUBIC控制器为主体,通过Scratch Pi编程连接反射光传感器和直流电机控制器,对落入棋子进行识别和筛选,最后通过履带分拣。
整个过程环环相扣,层层递进。
二、工作原理我设计的初衷是希望本项目可以摆脱棋子的束缚,因此,我着眼于所有围棋棋子共同的特点——颜色黑白分明,这样无论什么样的棋子都适用于本装置。
我想到应用反射光传感器,用它对黑、白棋子的反光数值进行读取,然后带动电机,实现自动分拣。
在对棋子进行读取时,因为光线不稳定,所以程序中设置了双重保险,一是在使用前对棋子进行初次检测,设置变量为设定值,二是对对比程序进行改进,将简单的比较大小的程序改进为运算程序,将底部平台的反光值控制在较稳定的范围内后,就可以在检测值和设定值之间预备一定的误差量,使程序更加稳定。
具体程序如图1、图2所示。
三、搭建模型搭建模型的传送履带是制作作品的主要难点。
在初期,我使用单电机探索,发现有以下几个问题:履带颜色单一,影响棋子识别(黑子);齿轮咬合如果过于紧密会导致电机压力太大,不宜长期使用,如果稍加疏松,棋子检测平台处就不是完美的水平面;两个齿轮在旋转过程中,可能出现互相咬合而无法正常运行的状况等。
思索一番后,我决定三题共解,使用双电机并对履带进行改进。
我用方梁将电机固定在履带两端,使其保持绷紧状态而两个齿轮也不会互相咬合。
我还设计了“五三角梁、三孔直梁、五孔直梁”配件并将其安装在履带上,使平台部分的履带始终保持水平,保证棋子检测时的稳定性。
通过以上搭建措施,核心的履带传送系统就完成了,通过履带系统延伸出的整个装置也已完成,如图3、图4所示。
围棋分拣机的毕业论文
围棋分拣机的毕业论文标题:基于深度学习的围棋分拣机研究与设计摘要:随着人工智能技术的不断发展,深度学习算法成为解决复杂问题的有效工具。
本文利用深度学习算法设计了一个围棋分拣机,用于对围棋棋子进行自动分拣。
通过收集、标注和训练大量的数据集,使用卷积神经网络来实现围棋棋子的识别和分类。
实验结果表明,该围棋分拣机具有较高的准确率和效率,能够实现自动分拣围棋棋子的功能。
关键词:围棋分拣机,深度学习,卷积神经网络,自动分拣1. 引言围棋作为一种古老而复杂的策略性棋类游戏,对于人们的智力和思维能力有着很高的要求。
然而,围棋棋子的数量庞大,手动分拣费时费力。
为了提高围棋棋子的分拣效率和准确性,设计一种围棋分拣机具有重要的研究意义。
2. 相关技术概述2.1 深度学习深度学习是一种基于大数据和人工神经网络的机器学习方法。
通过多层神经网络的结构,深度学习可以学习到数据的高层次特征表示,从而实现对复杂问题的解决。
2.2 卷积神经网络卷积神经网络是深度学习中常用的一种神经网络模型,具有优秀的图像处理能力。
通过卷积层、池化层和全连接层的结构,卷积神经网络能够对图像进行有效的特征提取和分类。
3. 围棋分拣机的设计与实现3.1 数据集的采集与标注为了训练围棋分拣机,首先需要采集和标注大量的围棋棋子图像数据。
通过在不同环境下拍摄围棋棋子的照片,并手动标注每个棋子的种类和位置,得到训练数据集。
3.2 卷积神经网络模型的设计基于采集和标注的数据集,设计卷积神经网络模型用于围棋棋子的识别和分类。
首先进行图像预处理,包括图像增强、去噪等操作,然后通过卷积层和池化层对图像进行特征提取,最后通过全连接层对特征进行分类。
3.3 实验结果分析通过对设计的围棋分拣机进行实验测试,评估其准确率和效率。
实验结果表明,该围棋分拣机在识别和分类围棋棋子的任务上具有较高的准确率和效率,能够实现自动分拣围棋棋子的功能。
4. 拓展与展望围棋分拣机在围棋棋子生产和销售过程中具有广泛的应用前景。
黑白棋的设计与实现

人工智能( 人工智能(Artificial Intelligence) ) 是借助计算机建造智能系统, 是借助计算机建造智能系统,完成诸 如模式识别、自然语言理解、 如模式识别、自然语言理解、程序自 动设计、定理自动证明、机器人、 动设计、定理自动证明、机器人、专 家系统等智能活动。 家系统等智能活动。它的最终目的是 构造智能机。 构造智能机。人工智能是一门正在经 历曲折道路、 历曲折道路、正在迅速发展中的并已 取得丰硕成果的学科, 取得丰硕成果的学科,也是人类遇到 的最复杂、最困难的学科之一。 的最复杂、最困难的学科之一。
具有悔棋功能,能判断每一步棋的对 具有悔棋功能 能判断每一步棋的对 具有不同难度的下棋技巧。 错;具有不同难度的下棋技巧。 具有不同难度的下棋技巧 Windows界面,可用鼠标操作,界 界面,可用鼠标操作, 界面 面友好。 面友好。 难度较高,能战胜一般的高手 使用 难度较高,能战胜一般的高手(使用 多种高级人工智能方法)。 多种高级人工智能方法 。
问题求解是人工智能中的核心问题。 问题求解是人工智能中的核心问题。 所谓问题求解是在给定条件下寻求一 个能解决某类问题且能在有限步骤内 完成的算法。 完成的算法。问题求解系统是人工智 能最早的尝试。例如下棋程序, 能最早的尝试。例如下棋程序,直到 今天,这种研究仍在进行。 今天,这种研究仍在进行。本题就是 针对人工智能初最为基础的利用博弈 树搜索原理进行此种问题求解系统的 实现。 实现。
黑白棋的设计与 实现
黑白棋:黑白棋也叫苹果棋、 黑白棋:黑白棋也叫苹果棋、翻 转棋,它使用8 的棋盘 的棋盘, 转棋,它使用 X8的棋盘,由两 人分别执黑子和白子轮流下棋, 人分别执黑子和白子轮流下棋, 最后子多方为胜。 最后子多方为胜。 下子方法: 下子方法:把棋子放在棋盘的空 格上,而当自己放下的棋子在横、 格上,而当自己放下的棋子在横、 竖、斜8个方向内有一个自己的 个方向内有一个自己的 旗子, 旗子,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高等教育自学考试本科毕业论文黑白棋子识别与分拣输送装置的设计考生姓名:李红亮准考证号: 011808101277 专业层次:本科院(系):机械与动力工程学院指导教师:唐建敏职称:讲师重庆科技学院二O一O年月日高等教育自学考试本科毕业论文黑白棋子识别与分拣输送装置的设计考生姓名:李红亮准考证号: 011808101277专业层次:本科指导教师:***院(系):机械与动力工程学院重庆科技学院二O一O年月日摘要物料的自动分拣及输送系统在汽车制造业、物流业及邮政系统等多个行业中广泛应用。
本设计为黑白棋子的识别与分拣输送装置设计,在自动上料机构的作用下,待分拣棋子自A地出发,由传输带输送至B地;在B地利用光电传感器进行识别及分拣,由分拣装置将分拣后的黑白棋子分别送至不同的储料箱。
装置的工作节拍用可编程逻辑控制器(PLC)控制。
本文是对整个设计工作较全面的介绍和总结。
关键词:黑白棋子识别;自动分拣输送;可编程逻辑控制器AbstractThe sorting and transportation automatically of raw material is wildly used in motor industry , logistics job and postal service system etc. This scheme introduced the design of the black-and-white chessman identing, sorting and transporting apparatus. At the hands of self-feeding apparatus, the sorting chessman departs from place A to place B through the given transmission line. When the sorting chessman arrives at place B, the sensor will identify and sorting them. And then, different raw material will be send to different box. The device job meter uses programmable logic controller (PLC) to control.This paper is more comprehensive introduction and summing-up for the whole design work.Key words: the black-and-white chessman identing;automatic sorting and transportation; programmable logic controller目录摘要 (I)ABSTRACT (II)1绪论 (1)2方案设计 (3)2.1设计方案一 (3)2.2设计方案二 (3)2.3设计方案三 (4)2.4方案比较 (5)3最终采用方案的总体设计 (6)3.1电动机的选择与校核 (6)3.1.1自动上料装置的电动机选择与校核 (6)3.1.2物料输送装置的电动机选择与校核 (7)3.1.3分拣装置的电动机选择与校核 (7)4机械结构及零部件的设计 (8)4.1装置总体结构设计 (8)4.2装置零部件设计 (9)4.2.1转盘驱动轴的设计 (9)4.2.2摇板传动轴的设计 (10)4.3轴承的选择 (10)4.4联轴器的选择 (11)4.4.1自动上料装置处联轴器的选择 (11)4.4.2物料输送装置处联轴器的选择 (12)4.4.3分拣装置处联轴器的选择 (12)5可编程逻辑控制器(PLC)控制系统的设计 (13)5.1设计要求 (13)5.1.1控制功能 (13)5.1.2控制要求 (13)5.2控制设计 (13)5.2.1控制分析 (13)5.2.2控制程序设计 (13)5.3控制程序语句表 (15)6结论 (16)参考文献 (17)致谢 (18)论文原创性声明1绪论自动分拣系统(Automated Sorting System)是二次大战后在美国、日本的物流中心中广泛采用的一种自动分拣系统,该系统目前已经成为发达国家大中型物流中心不可缺少的一部分。
该系统的作业过程可以简单描述如下:物流中心每天接收成百上千家供应商或货主通过各种运输工具送来的成千上万种商品,在最短的时间内将这些商品卸下并按商品品种、货主、储位或发送地点进行快速准确的分类,将这些商品运送到指定地点(如指定的货架、加工区域、出货站台等),同时,当供应商或货主通知物流中心按配送指示发货时,自动分拣系统在最短的时间内从庞大的高层货存架存储系统中准确找到要出库的商品所在位置,并按所需数量出库,将从不同储位上取出的不同数量的商品按配送地点的不同运送到不同的理货区域或配送站台集中,以便装车配送。
自动分拣系统的主要特点是能连续、大批量地分拣货物,分拣误差率极低,分拣作业基本实无人化。
自动分拣系统一般由控制装置、分类装置、输送装置及分拣道口组成。
控制装置的作用是识别、接收和处理分拣信号,根据分拣信号的要求指示分类装置、按商品品种、按商品送达地点或按货主的类别对商品进行自动分类。
分类装置的作用是根据控制装置发出的分拣指示,当具有相同分拣信号的商品经过该装置时,该装置动作,使改变在输送装置上的运行方向进入其它输送机或进入分拣道口。
输送装置的主要组成部分是传送带或输送机,其主要作用是使待分拣商品鱼贯通过控制装置、分类装置,并输送装置的两侧,一般要连接若干分拣道口,使分好类的商品滑下主输送机(或主传送带)以便进行后续作业。
分拣道口是已分拣商品脱离主输送机(或主传送带)进入集货区域的通道,一般由钢带、皮带、滚筒等组成滑道,使商品从主输送装置滑向集货站台,在那里由工作人员将该道口的所有商品集中后或是入库储存,或是组配装车并进行配送作业。
以上四部分装置通过计算机网络联结在一起,配合人工控制及相应的人工处理环节构成一个完整的自动分拣系统。
自动分拣系统主要适用于一次性投资巨大、对商品外包装要求高的场合。
分拣输送是物流配送中的一个关键环节,它指的是依据顾客订货要求或配送中心送货计划,迅速、准确地将商品从储位或其他区域拣出,并按照一定方式进行分类、集中,等待配装送货的作业过程。
分拣输送是配送中心作业中最繁锁、工作量最大的环节,也是配送中心作业系统的核心。
如今,商品经济逐步深入,社会需求呈现出向小批量、多品种方向发展的趋势,配送商品的种类和数量急剧增加,使得分拣输送作业在配送中心作业的比重越来越大,而客户对配送服务和质量的要求也越来越高。
分拣输送作业的速度和质量直接关系到整个配送中心的信誉和服务水平,分拣系统的建设也成为配送中心非常重视的问题之一。
黑白棋子识别及分拣输送装置主要用于将混合在一起的黑白棋子识别分拣后按照指定路径送至不同的储料箱。
该装置是工业自动分拣输送系统的一个简单例子。
自动分拣输送系统不仅可将工人从单调繁重的劳动中解放出来,而且分拣正确率更高,在汽车装配业、邮政系统及物流业应用越来越广泛。
对黑白棋子识别及分拣输送装置的设计要用到传动机构设计、零件制造技术、电气控制、微机原理、PLC技术、数控加工技术、传感器技术等多项技术。
自动分拣输送系统的工作原理较为简单,结构也不太复杂,能够在毕业设计给定的有限时间内完成,而且包含设计内容较全面,能够使学生综合运用机械专业较多的专业知识。
通过对黑白棋子识别及分拣输送装置的设计及模型制作,能够使学生掌握机械设计的一般规律和过程,在专业应用、创新能力和解决实际问题的能力方面得到全面提高。
为进一步走上工作岗位从事相关的设计、制造、控制等工作奠定基础。
2 方案设计黑白棋子识别及分拣输送装置在工作时,需要一个自动上料装置、传输装置及分拣系统。
混乱的黑白棋子通过自动上料装置获得定向排列,由传输系统按照生产要求的节拍和位置送至分拣系统处分拣,分拣系统将送来的黑白棋子分拣后分至不同的储料箱。
2.1设计方案一曲柄滑块机构上料,分拣输送带分拣方案其结构简图如下:1、曲柄2、推料滑块3、料斗4、黑白棋子5、供料道6、传输带7、光电传感器8、滚筒9、分拣输送带 10、黑白棋子储料箱图2.1 曲柄滑块机构上料,分路器分拣方案示意图从图2.1中看出,其工作原理是:待分拣的黑白棋子从料斗进入供料道,曲柄在电动机的带动下带动滑块在供料道中做往复运动,从而使棋子按一定节拍顺序供料;滚筒驱动传输带将棋子送至指定地点,并由此处传感器进行黑白分拣,传感器的数据信息控制电动机正反转带动分拣输送带,从而将黑白棋子分别送至不同储料箱。
2.2设计方案二锥形摩擦盘上料,分路器分拣方案结构简图如下:1、料斗2、锥形摩擦盘3、供料道4、传输带5、传感器6、滚筒7、分路器8、黑色棋子9、白色棋子 10、储料箱图2.2锥形摩擦盘上料,分路器分拣方案示意图由图2.2中看出,其工作原理是:待分拣的黑白棋子装进料斗,电动机带动传动轴及锥形摩擦盘转动,棋子在锥形摩擦盘的摩擦力及转动离心力作用下被送进供料道,之后由滚筒带动传输带将棋子送至指定地,此处的传感器识别黑白棋子后驱动分路器将黑白棋子分别送至不同的储料箱。
2.3设计方案三漏斗上料,分拣机械手分拣方案其工作原理简图如下:1、滚筒2、黑白棋子3、料斗4、传输带5、光电传感器6、分拣机械手7、分拣平台8、储料箱图2.3漏斗上料,分拣机械手机构方案示意图其工作过程为:棋子由料斗靠自重落到传输带上,滚筒带动传输带将棋子送到分拣平台处,由光电传感器识别黑白棋子,之后用分拣机械手将棋子分别送至不同的储料箱。
2.4方案比较以上三种方案,从原理上说都能完成设计任务书提出的要求,但方案三中涉及对分拣机械手的设计制造,考虑到设计时间、实际加工难度及维修费用的影响,排除这种方案;方案一的工作效率不高,且已有现成模型,故综合考虑决定选用方案二。
下章将对最终采用方案进行产品设计。
3 最终采用方案的总体设计经比较后选用第二种方案,即锥形摩擦盘上料,分路器分拣方案。
其结构简图如图2.2所示,黑白棋子识别及分拣输送装置由下列主要部件组成:自动上料装置、物料输送装置、分拣装置、支架、底座和电动机。
为使总装置体积小,结构紧凑,采用上下结构布局,其减速机构均安置于电动机内部,即选用齿轮减速电动机;为运转灵活,在装置各转动处均采用滚动轴承支撑。
3.1电动机的选择与校核3.1.1自动上料装置的电动机选择与校核查《工程力学》表3.1可知,橡胶与铸铁之间在无润滑剂润滑时动摩擦因数f=0.80 故005103008035cos .cos ..N F mg f Kg N Kg Nθ=⋅=⨯⨯⨯=离心力2L mv F r =式中m=0.05Kgr=50mm要想让棋子抛出,则L NF F ≥即41v r ≥为使自动上料装置的驱动电机体积小,初选电动机为同步转速60r/min 的永磁低速同步电动机。