ethercat 时钟同步原理
ethercat 运行原理
ethercat 运行原理EtherCAT(Ethernet for Control Automation Technology)是一种用于工业控制系统的实时以太网通信协议。
它的运行原理是通过将控制器和从设备连接成一个环形的总线拓扑结构,实现高速、实时的数据通信。
EtherCAT的运行原理可以分为三个主要步骤:数据通信、数据处理和数据交互。
数据通信是EtherCAT的核心功能,它通过一个主站(通常是PLC 或PC)和多个从站(如传感器、执行器等)之间的数据交换来实现。
主站负责向从站发送指令,从站接收并执行这些指令,并将执行结果返回给主站。
这种通信方式可以实现高速、实时的数据传输,可以满足工业控制系统对于实时性和可靠性的要求。
数据处理是EtherCAT的关键步骤之一。
主站接收从站返回的数据后,需要对这些数据进行处理和解析,以便实现对系统的控制和监控。
在数据处理过程中,主站可以根据需要来执行各种算法和逻辑操作,例如PID控制算法、数据筛选等。
通过数据处理,主站可以实现对从站的精确控制,并获取实时的系统状态信息。
数据交互是指主站和从站之间进行数据传输和通信的过程。
EtherCAT使用一种称为“Telegram”的数据报文来实现主从站之间的通信。
Telegram包含了控制指令、数据和状态信息等,通过总线传输给从站。
从站接收到Telegram后,会根据指令来执行相应的操作,并将执行结果封装在Telegram中返回给主站。
这种数据交互的方式能够实现高效的通信,并保证数据的实时性和可靠性。
总的来说,EtherCAT的运行原理是通过数据通信、数据处理和数据交互这三个步骤来实现工业控制系统的高速、实时通信。
通过将控制器和从设备连接成一个环形的总线拓扑结构,并使用Telegram 进行数据传输和通信,EtherCAT能够满足工业控制系统对于高速、实时通信的要求,提高系统的控制精度和响应速度。
需要注意的是,EtherCAT的运行原理是基于实时以太网技术的,它采用了一系列的协议和机制来保证数据的实时性和可靠性。
Ether CAT

EtherCAT实时以太网EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,EtherCAT名称中的CAT为Control Automation T echnology(控制自动化技术)首字母的缩写。
最初由德国倍福自动化有限公司(Beckhoff Automation GmbH) 研发。
EtherCAT为用成本。
EtherCAT的特点还包括高精度设备同步,可选线缆冗余,和功能性安全协议(SIL3)。
Ether CAT(Ethernet for Control Automation Technology)是一种实时以太网现场总线系统。
Ether CAT具有速度快,布线容易的特点:且具有兼容性和开放性;适合于快速控制的应用场合。
Ether CAT的工作原理以太网是一种802.3 基带总线局域网,采用载波侦听多路访问/冲突检测(CSMA/CD)介质访问控制方式。
实时以太网Ether CAT 技术采用了主从介质访问方式,在基于Ether CAT 的系统中,主站控制从站发送或接收数据。
主站发送数据帧,从站在数据帧经过从站时读取相关报文中的输出数据。
同时,从站的输入数据插入到同一数据帧的相关报文中。
当该数据帧经过所有从站并与从站进行数据交换后,由Ether CAT 系统中末端从站将数据帧返回,如图1。
Ether CAT 的性能Ether CAT 支持各种拓扑结构,如总线型、星型、环形等,并且允许Ether CAT 系统中出现多种结构的组合。
支持多种传输电缆,如双绞线、光纤、光导总线等,以适应于不同的场合,以提升布线的灵活性。
Ether CAT 采用了精准的同步时钟系统。
系统中的数据交换完全是基于纯硬件机制,由于通讯采用了逻辑环结构(借助于全双工快速以太网的物理层),主站时钟能简单、精确地确定各个从站传播的延迟偏移。
分布时钟均基于主时钟进行调整,在网络范围内使用精确且确定的同步误差时间基。
ethercat原理

ethercat原理
EtherCAT是一种高速实时以太网通信协议,它采用了
Master-Slave结构,并利用了分布式时钟同步技术来实现高速的数据通信。
在EtherCAT网络中,主节点会将控制命令发送给从节点,从节点会实时响应并将处理后的数据返回给主节点。
这种通信方式使得EtherCAT适用于高速、实时的控制系统。
EtherCAT网络中的从节点必须具备较高的通信速度和响应能力。
为了实现这一点,EtherCAT采用了一种称为“EtherCAT Frame”的通信帧结构。
这种通信帧可以在传输过程中实时处理,从而降低了通信时延和CPU占用率。
除了高速实时通信外,EtherCAT还具备了很好的扩展性。
由于它采用了以太网作为物理层,因此可以利用现有的以太网设备进行扩展。
此外,EtherCAT还支持多种拓扑结构,如星形、环形、树形等,可以根据实际应用场景进行选择。
总之,EtherCAT是一种高速、实时、可扩展的控制网络协议,它在工业自动化领域得到了广泛应用。
- 1 -。
ethercat电路原理

ethercat电路原理EtherCAT(以太网控制自动化技术)是一种基于以太网的工业以太网技术,用于实现实时性要求高的工业控制应用。
它的电路原理涉及到以太网物理层、数据链路层和应用层的设计。
在EtherCAT 电路中,主要包括以下几个部分:1. 物理层:EtherCAT 采用了标准的以太网物理层,支持100BASE-TX 和1000BASE-T 以太网标准。
物理层负责将数据在以太网链路上进行传输。
2. 数据链路层:EtherCAT 在数据链路层使用了一种特殊的协议,称为EtherCAT 协议。
该协议采用了主从结构,主站负责发送数据帧,从站负责接收和处理数据。
EtherCAT 协议通过以太网数据帧的扩展字段来传输实时数据和控制信息。
3. 应用层:EtherCAT 应用层包括设备描述文件(Device Description File,DDF)和过程数据对象(Process Data Object,PDO)。
DDF 用于描述从站设备的特性和功能,PDO 用于传输实时的过程数据。
EtherCAT 电路的工作原理是:主站发送数据帧到从站,从站接收数据并根据DDF 进行解析和处理。
如果数据帧中包含PDO 数据,从站将实时数据传输给主站。
主站可以通过轮询或事件触发的方式与从站进行通信。
EtherCAT 的实时性是通过使用特殊的数据链路层协议和硬件实现的。
它采用了时间同步机制,保证了数据传输的确定性和实时性。
需要注意的是,以上是EtherCAT 电路的基本原理,实际的EtherCAT 系统还涉及到更多的细节和功能,如网络拓扑、从站配置、错误处理等。
如果你需要更深入了解EtherCAT 电路原理,建议参考相关的技术文档和资料。
ethercat协议解析

ethercat协议解析EtherCAT(Ethernet for Control Automation Technology)是一种用于实时工业自动化领域的通信协议。
它是基于以太网技术的开放式标准,旨在提供快速和可靠的实时通信能力。
本文将对EtherCAT协议进行解析,介绍其原理、特点和应用领域。
1. EtherCAT协议的原理EtherCAT协议采用了主从结构,由一个主站(Master)和多个从站(Slave)组成。
主站负责控制和协调从站的通信过程,从站用于连接传感器、执行器等设备,并通过 EtherCAT 总线与主站进行实时通信。
在EtherCAT总线上,主站通过发送广播消息的方式将数据传输给从站。
从站收到消息后,在消息的尾部加入自己的数据,并在不删除原始消息的情况下将消息继续传递给下一个从站,形成了一个环形结构。
这种消息传递方式被称为“分布式时钟同步广播”。
2. EtherCAT协议的特点2.1 高实时性:EtherCAT协议采用了快速数据传输方式,具有极低的通信延迟和高带宽。
这使得它在实时性要求严格的工业控制系统中得到广泛应用。
2.2 灵活性:EtherCAT总线支持多种拓扑结构,包括线性、树形和环形结构,适应不同工业环境的需求。
此外,EtherCAT还支持多种物理层接口,如光纤和电缆,以适应不同的通信环境。
2.3 简化布线:EtherCAT总线采用简单的硬件拓扑结构和标准以太网线缆,降低了系统的布线难度和成本。
2.4 容错性:EtherCAT协议具有自动冲突检测和冲突解决功能,可在网络拓扑发生变化时自动适应,并保持网络正常运行。
2.5 开放性:EtherCAT是一个开放的通信协议,其通信规范公开可得。
这使得各厂商可以根据自己的需求和应用开发符合EtherCAT标准的设备和系统。
3. EtherCAT协议的应用领域EtherCAT协议在各种工业自动化领域得到了广泛应用,包括机器人控制、自动化生产线、测试和测量系统等。
ethercat 技术的运行原理
ethercat 技术的运行原理EtherCAT(Ethernet for Control Automation Technology)是一种实时以太网通信协议,被广泛应用于工业自动化领域。
它的运行原理主要包括数据帧结构、通信方式和实时性保障等方面。
EtherCAT的数据帧结构采用主从式的通信方式。
在一个EtherCAT 网络中,一台主站(Master)与多台从站(Slave)通过以太网交换数据。
主站负责发送同步帧和数据帧,而从站则负责接收和处理这些帧。
在数据传输过程中,EtherCAT采用了“分布式时钟”技术,即每个从站都有自己的时钟,并且从站之间的时钟是相互同步的。
这样一来,即使网络中存在多个从站,数据传输也能保持高效和同步。
EtherCAT的通信方式采用了“数据链”模式。
在数据链中,每个从站都被分配了一个固定的数据区域,用于存储输入和输出数据。
主站通过数据链逐个访问每个从站的数据区域,实现数据的读取和写入。
这种通信方式具有高效性和灵活性,可以在不影响实时性的情况下实现大量数据的传输。
EtherCAT还通过一些技术手段来保证通信的实时性。
首先,EtherCAT网络中的所有从站都可以同时接收和发送数据,不需要像传统的以太网那样依次发送数据帧。
这样可以大大缩短数据传输的时间,提高实时性。
其次,EtherCAT采用了硬件加速和优化算法,可以在网络中传输大量的实时数据,如高速采样数据、快速控制命令等。
最后,EtherCAT还支持主站和从站之间的“分布式时钟同步”,使得整个网络中的时钟保持同步,从而确保数据传输的准确性和一致性。
总结起来,EtherCAT技术的运行原理主要包括数据帧结构、通信方式和实时性保障。
通过主从式的通信方式、数据链模式和分布式时钟同步等技术手段,EtherCAT可以实现高效、实时的数据传输,满足工业自动化领域对于高性能通信的需求。
EtherCAT技术的原理、性能及应用优势
EtherCAT技术的原理、性能及应用优势简介EtherCAT主张“以太网控制自动化技术” 。
它是一个开放源代码,高性能的系统,目的是利用以太网协议(最惠国待遇系统局域网),在一个工业环境,特别是对工厂和其他制造业的关注,其中利用机器人和其他装备线上的技术。
EtherCAT是IEC规范(IEC/PAS 62407)。
原理目前有多种用于提供实时功能的以太网方案:例如,通过较高级的协议层禁止CSMA/CD 存取过程,并使用时间片或轮询过程来取代它。
其它方案使用专用交换机,并采用精确的时间控制方式分配以太网数据包。
尽管这些解决方案能够比较快和比较准确地将数据包传送到所连接的以太网节点,但带宽的利用率却很低,特别是对于典型的自动化设备,因为即使对于非常小的数据量,也必须要发送一个完整的以太网帧。
而且,重新定向到输出或驱动控制器,以及读取输入数据所需的时间主要取决于执行方式。
通常也需要使用一条子总线,特别是在模块化I/O系统中,这些系统与Beckhoff K-总线一样,通过同步子总线系统加快传输速度,但是这样的同步将无法避免引起通讯总线传输的延迟。
通过采用EtherCAT技术, Beckhoff突破了其它以太网解决方案的这些系统限制:不必再像从前那样在每个连接点接收以太网数据包,然后进行解码并复制为过程数据。
当帧通过每一个设备(包括底层端子设备)时,EtherCAT从站控制器读取对于该设备十分重要的数据。
同样,输入数据可以在报文通过时插入至报文中。
在帧被传递(仅被延迟几位)过去的时候,从站会识别出相关命令,并进行处理。
此过程是在从站控制器中通过硬件实现的,因此与协议堆栈软件的实时运行系统或处理器性能无关。
网段中的最后一个EtherCAT 从站将经过充分处理的报文返回,这样该报文就作为一个响应报文由第一个从站返回到主站。
从以太网的角度看,EtherCAT总线网段只是一个可接收和发送以太网帧的大型以太网设备。
ethercat 通讯结构

ethercat 通讯结构
EtherCAT(Ethernet for Control Automation Technology)是一种实时以太网通信技术。
EtherCAT通讯结构是面向实时数据传输的控制系统通讯解决方案。
基于EtherCAT的通讯结构可以有效提高工业自动化控制系统的响应速度和实时性能,取代了传统的工业总线通讯方案,在众多行业领域得到广泛应用。
EtherCAT通讯结构采用一种特殊的实时通信机制——分布式时钟同步技术。
通过在通信帧中加入时间戳,所有连接在同一个EtherCAT网络上的设备都能够在同一时刻接收到数据,并在同一时刻将处理后的数据返回控制器,实现了高效的实时数据通讯。
具体来说,EtherCAT通讯结构由一个主站和多个从站组成。
主站负责管理整个系统,发送控制命令和接收从站返回的数据。
从站负责采集传感器数据、执行控制命令等任务,并将处理后的数据返回给主站。
主站和从站之间的通信和数据传输都是通过以太网物理层协议来进行的。
在EtherCAT通讯结构中,数据包从主站发送到第一个从站,然后沿着EtherCAT网络一路转发,直到所有从站都接收到数据包并完成响应。
这种分布式的通信方式,使得EtherCAT通讯结构在大规模多终
端的工业控制系统中,具备了高效快速传输的能力。
总之,EtherCAT通讯结构通过采用先进的分布式时钟同步技术,实现了高效可靠的实时数据通讯。
由于其高速传输、开放标准、强大的网络管理和配置能力,被广泛应用于机器人控制、智能制造、智能建筑等众多领域,成为工业自动化控制系统中的重要技术。
ethercat通讯原理
ethercat通讯原理EtherCAT(以太CAT)是一种高性能、实时性和开放性的实时以太网通信技术。
它基于标准的以太网硬件和IEEE 802.3以太网协议进行通信。
EtherCAT的通信原理是通过在以太网数据帧中进行快速和实时的数据通信,以达到高效的通信和控制。
下面将详细介绍EtherCAT通信的原理。
EtherCAT通信的核心原理是主站和从站之间的数据传递。
在EtherCAT网络中,主站是负责控制和监视从站的设备,而从站是执行主站指令的设备。
主站通过以太网发送数据帧,从站在接收到数据帧后,按照EtherCAT协议进行数据处理,并将数据返回给主站。
EtherCAT网络将数据帧分为多个数据段(Data Segment),每个数据段有一个从站的网络地址和数据大小。
主站发送数据帧时,数据段经过整个从站链路,每个从站在接收到数据段后,处理其中的数据并将数据通过链路传递给下一个从站。
EtherCAT通信的特点之一是采用了分布式时钟同步技术。
在整个EtherCAT网络中,有一个主站担任时钟主节点的角色,负责向所有从站发送同步数据。
从站接收到同步数据后,利用硬件实现时钟同步,保证所有从站的时钟保持同步。
EtherCAT通信还采用了逐次处理的方式,即从站接收到数据后立即处理数据,并将处理结果发送给下一个从站。
这样可以大大减小主站与从站之间的通信延迟,并且降低了通信周期。
EtherCAT通信的速度非常快,达到每个数据帧可达到1000多个从站的传输速率,同时EtherCAT通信还可以与标准以太网连接,实现与其他以太网设备的数据交换,提高了系统的灵活性和可扩展性。
总结起来,EtherCAT通信的原理是通过将数据分成多个数据段,逐个传递给从站,在从站之间进行快速数据处理和传递。
采用分布式时钟同步和逐次处理的技术,实现高效的通信和控制。
EtherCAT通信的优势是实时性强、速度快,同时与标准以太网兼容,具有较高的可扩展性和灵活性。
ethercat 扫描原理

ethercat 扫描原理EtherCAT(Ethernet for Control Automation Technology)是一种用于实时控制和自动化领域的工业以太网协议。
EtherCAT的扫描原理是一种分布式实时控制系统的工作方式。
下面是EtherCAT扫描原理的基本概念:1. 主站和从站: EtherCAT网络通常包括一个主站(Master)和多个从站(Slave)。
主站负责控制和协调整个网络,而从站执行主站下达的命令。
2. 分布式时钟同步:EtherCAT通过在网络上传递分布式时钟同步信息,使得网络中的所有设备都能够保持高精度的时间同步。
这对于实时控制非常重要,因为各个设备需要协同工作,并在同一时刻进行数据交换。
3. Telegram(电报):EtherCAT使用Telegram来在网络中传递数据。
Telegram是一种数据包,其中包含从站的输入数据、主站的输出数据以及同步信息。
4. 扫描过程:EtherCAT的扫描过程是一个实时的、循环的过程。
在每个通信周期内,主站向从站发送电报,从站接收并处理电报,然后将响应数据传回主站。
这个过程非常迅速,允许实时控制系统以非常高的速率运行。
5. Distributed Clocks(分布式时钟): EtherCAT的分布式时钟允许从站在相同的时间基准上进行操作。
主站负责向网络中的每个从站发送同步信息,使得整个网络的时钟同步到毫秒或亚毫秒级别。
6. 环形拓扑结构:EtherCAT网络通常采用环形拓扑结构,即主站通过一个物理线圈连接到每个从站。
这样的设计使得电报能够沿着环形结构快速传递,减少了通信的延迟。
总体来说,EtherCAT的扫描原理通过分布式时钟同步、快速的电报传递和环形拓扑结构,实现了高效的实时控制和数据交换。
这使得EtherCAT在工业自动化领域中得到广泛应用,特别是对于需要高性能、低延迟的实时应用场景。
ethercat 分布式时钟参数

ethercat 分布式时钟参数(原创实用版)目录1.EtherCAT 分布式时钟技术概述2.EtherCAT 分布式时钟的原理与实现3.EtherCAT 分布式时钟的应用场景4.EtherCAT 分布式时钟的优势5.EtherCAT 分布式时钟的未来发展前景正文一、EtherCAT 分布式时钟技术概述EtherCAT(Ethernet Control Automation Technology)是一种基于以太网的工业控制技术,其分布式时钟技术是该技术的一个重要组成部分。
EtherCAT 分布式时钟技术通过在 EtherCAT 网络中的每个从站设备内置高精度时钟,实现对整个网络的精确时间同步。
该技术能够使得整个系统运行在统一的时钟下,每个设备的同步性远小于 1 微秒,从而提高了系统的精确性和实时性。
二、EtherCAT 分布式时钟的原理与实现EtherCAT 分布式时钟的原理是通过分布在各个从站设备中的高精度时钟模块,在 EtherCAT 网络中实现时间同步。
这些时钟模块在接收到网络中的时钟信号后,会与本地时钟进行比对,然后通过 EtherCAT 网络将校正后的时钟信号发送给其他从站设备。
在这个过程中,每个从站设备的时钟都能够与网络中的主时钟保持精确同步。
EtherCAT 分布式时钟的实现主要依赖于两个硬件组件:分布式时钟单元(DSU)和时钟精度调整单元(FMMU)。
DSU 负责从网络中接收时钟信号,并将其转发给 FMMU。
FMMU 则负责对收到的时钟信号进行处理,生成本地时钟信号,并将其发送给其他从站设备。
此外,EtherCAT 分布式时钟还需要借助于高精度的晶体振荡器来提供基准时钟信号。
三、EtherCAT 分布式时钟的应用场景EtherCAT 分布式时钟技术在工业控制领域有着广泛的应用,尤其在那些对实时性和精确性要求较高的场景中。
以下是一些典型的应用场景:1.机器人控制:在机器人控制系统中,各个关节的运动需要高度同步,EtherCAT 分布式时钟技术可以提供精确的时间同步,保证机器人的运动精度和速度。
ethercat 通讯结构
Ethercat 通讯结构介绍Ethercat(以太网计算机自动控制技术)是一种高性能、实时以太网通信协议,适用于工业自动化领域。
本文将全面探讨Ethercat通讯结构,包括其基本原理、通讯模型以及应用实例。
Ethercat 通讯基本原理Ethercat 通讯基于以太网协议,但它采用了一种分布式时钟同步和全局共享通道的方式,使得各个从设备之间的通讯变得十分高效和实时。
Ethercat 的基本工作原理如下:1.Master-Slave 结构:Ethercat 网络由一个Master(主主机)和多个Slave(从设备)组成。
Master负责控制通讯的调度和同步,而Slave则负责执行具体的任务。
2.工作周期:Ethercat 的通讯是按照固定的周期进行的,该周期被称为工作周期。
Master控制数据帧的发送和接收,并确保在每个工作周期内完成所有从设备的通讯。
3.分布式时钟同步:Ethercat 网络的一个重要特点是分布式时钟同步。
Master通过向每个Slave发送同步帧来同步所有从设备的时钟,使得整个网络保持高度同步。
4.数据传输:Ethercat 通过在一个以太网数据帧(Ethercat Frame)中封装从设备的数据,实现高效的数据传输。
每个数据帧中可以包含一个或多个从设备的数据信息。
Ethercat 通讯模型Ethercat 采用了Master-Slave结构的通讯模型,下面是Ethercat 通讯模型的详细流程:1.Master 发送同步帧:在每个工作周期的开始,Master向网络中的所有Slave发送同步帧,以实现时钟同步。
2.从设备响应:每个Slave接收到同步帧后,根据同步帧中的时间戳更新自身的时钟,并准备好接收数据。
3.数据传输:Master在同一个工作周期内依次发送数据帧给每个Slave,并接收从设备返回的数据。
4.数据处理:每个Slave接收到数据帧后,解析其中的数据,并根据Master的指示执行相应的任务。
ethercat原理介绍及应用实例

ethercat原理介绍及应用实例EtherCAT的原理是基于以太网技术的,但与传统以太网不同的是,它使用了一种称为“分布式时钟同步”的技术。
在EtherCAT网络中,每个从站(Slave)都具有自己的时钟,主站(Master)通过广播同步帧将数据发送给所有的从站,从站们都能够在同一时刻接收到数据。
这种同步技术使得EtherCAT网络能够以很高的实时性和精准度传输数据,从而满足实时控制系统的要求。
在实际应用中,EtherCAT可以用于各种工业自动化系统中,例如机床、生产线、机器人等。
下面将介绍一些实际应用案例,以便更好地理解EtherCAT的应用。
1. 机械控制系统在机械控制系统中,通常需要对各种运动控制设备进行精确控制。
EtherCAT可以被用来连接各种运动控制器、伺服驱动器、编码器等设备,实现对机械系统的实时控制。
通过EtherCAT网络,可以将各个控制设备连接在一起,实现数据共享和同步控制。
举例来说,一个自动化生产线中可能会有多个运动轴需要控制,比如输送带、机械臂等。
利用EtherCAT网络可以将这些运动轴连接在一起,实现统一的运动控制。
主站可以发送指令给各个从站,从而实现对多个运动轴的同步控制,提高生产效率和精度。
2. 工业机器人工业机器人是现代工业生产中不可或缺的设备,它可以自动执行各种生产任务,提高生产效率和产品质量。
在工业机器人的控制系统中,需要实时传输大量的数据,以确保机器人的运动精度和安全性。
EtherCAT可以被用来连接机器人控制器、传感器、执行器等设备,实现对工业机器人的实时控制。
通过EtherCAT网络,控制器可以实时接收到传感器的数据,并根据实时情况做出相应的控制指令,从而确保机器人的准确运动和安全操作。
3. 数据采集和监控系统在工业生产中,需要采集和监控各种数据来确保生产过程的正常运行。
EtherCAT可以被用来连接各种传感器、控制器、监控设备等,实现对工业过程的实时监控和数据采集。
EtherCAT Master主站同步时钟技术资料
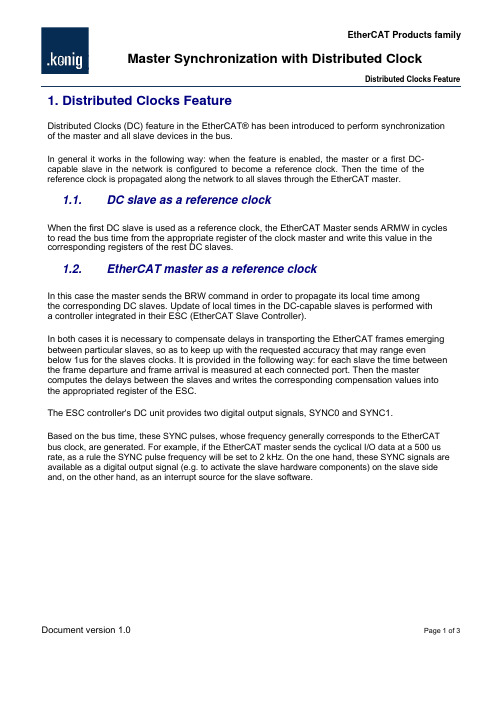
Distributed Clocks Feature1. Distributed Clocks FeatureDistributed Clocks (DC) feature in the EtherCAT® has been introduced to perform synchronizationof the master and all slave devices in the bus.In general it works in the following way: when the feature is enabled, the master or a first DC-capable slave in the network is configured to become a reference clock. Then the time of the reference clock is propagated along the network to all slaves through the EtherCAT master.1.1. DC slave as a reference clockWhen the first DC slave is used as a reference clock, the EtherCAT Master sends ARMW in cyclesto read the bus time from the appropriate register of the clock master and write this value in the corresponding registers of the rest DC slaves.as a reference clockmaster1.2. EtherCATIn this case the master sends the BRW command in order to propagate its local time amongthe corresponding DC slaves. Update of local times in the DC-capable slaves is performed witha controller integrated in their ESC (EtherCAT Slave Controller).In both cases it is necessary to compensate delays in transporting the EtherCAT frames emerging between particular slaves, so as to keep up with the requested accuracy that may range evenbelow 1us for the slaves clocks. It is provided in the following way: for each slave the time between the frame departure and frame arrival is measured at each connected port. Then the master computes the delays between the slaves and writes the corresponding compensation values intothe appropriated register of the ESC.The ESC controller's DC unit provides two digital output signals, SYNC0 and SYNC1.Based on the bus time, these SYNC pulses, whose frequency generally corresponds to the EtherCATbus clock, are generated. For example, if the EtherCAT master sends the cyclical I/O data at a 500 us rate, as a rule the SYNC pulse frequency will be set to 2 kHz. On the one hand, these SYNC signals are available as a digital output signal (e.g. to activate the slave hardware components) on the slave side and, on the other hand, as an interrupt source for the slave software.Document version 1.0Page 1 of 3Distributed Clocks Feature Taking into account the aforementioned, it is obvious that all slaves have to be provided with thenew data before the SYNC pulse is released, see picture below Thus a minimum time lag between the arrival of new cyclical I/O data and the SYNC pulse must be guaranteed to ensure this data update.The local apolicaton is started with a local timer. The local timer is shifted to the DC base Time by the sum of the tollowmg times:Duration of the appllcation execution time (Application)Frame transmission time (Frame)Frame transmission delay (Delay)User Shift (U) whilch shall include the maximum of the minimum delay times of theslaves and the maximum jitter of the execution of the applicationo U+ positive User Shift as shown in Figure User Shifto U- negative User Shift as shown in Figure User ShiftDocument version 1.0Page 2 of 3Master Synchronization 2. Master SynchronizationThe EtherCAT master stack sends its cyclic I/O data in accordance with a local timer in the controller hardware (e.g. Programmable Interval Timer (PIT) or Advanced Programmable Interrupt Controller (APIC) timer). Should the system run in a 2kHz cycle, the local timer and the slavetimer,that is responsible to generate the SYNC pulses, are set to 2kHz. In fact the local timer and the slave timers will not run at an exact cycle rate producing a drift among these timers. Consequently, a constant interval between sending the cyclic I/O data in the master andgeneration of the SYNC pulses in the slaves is impossible. In this case to enable control over the interval with a constant value the EtherCAT master either has to synchronize its local timer withthe clock in the first DC-capable slave which is set as a reference clock or synchronize the clocksin all DC-capable slaves with its local timer.The Master Synchronization is supported by the KPA EtherCAT Master and can be employed intwo ways:1. the local timer (e.g. the PIT or APIC-timer) is re-adjusted from the Master side (The firstDC slave is a reference clock)2. the bus time is re-adjusted in accordance with the Master’s local timer (Master is areference clock).When the first option is used, the EtherCAT master cyclically calculates the difference between the EtherCAT master time and the DC clock master time. The re-adjustment value is rated with a PI controller algorithm in accordance with the set value (the distance from the SYNC pulse to thetimer-interrupt in the master).For the second option the Master cyclically propagates the local time by mean of BWR command. Distributed Clock feature is included to KPA EtherCAT Master Standard and Premium versions.Document version 1.0Page 3 of 3。
EtherCAT主从同步方法

EtherCAT主从同步方法1. 时钟漂移问题如图所示,主站和从站通过EtherCAT总线连接,设主站的晶振频率为f0,从站1晶振频率f1,从站2晶振频率f2,假如在3个设备中同时设置一个定时长度为T的周期性定时器,由于晶振频率的微小差异,不可能使得3个设备同时完成定时器触发。
由于是周期性的,这微小的触发时间不一致会累积起来,直到出现质变例如在相同时间段内,主站出发了N次,从站1触发了M次,从站2触发了K次。
以伺服驱动器为例:Sync0Eva.T1CNTSync0信号为1ms(过程数据交换周期也设为1ms)为周期的总线同步型号,Eva.T1CNT为从站DSP的控制周期计数器(0→Max→0为一个周期,设定为125us)。
由于Sync0信号跟随的是主站的系统时钟,Eva计数使用的是从站的晶振,因此它们所认为的时间长度T必然会有差异。
理论上来说,Eva的8个周期,125us*8=1ms应该和Sync0的产生周期1ms一致,但实际情况由上图可知,它们并不一致。
这种差异会累积起来,导致Eva的控制周期相对于Sync0产生漂移。
假设伺服驱动器中位置采样都在Eva.T1CNT=Max时进行,正常情况下1个Sync0周期内会进行8次位置采样,而由于漂移的问题,可能会产生9次位置采样。
这种情况对于主站来说是不可见的,主站依旧会认为获得的位置反馈为8次采样的值。
当对位置反馈值做微分获得速度值时,就可以看到速度会在9次位置采样时产生跳变。
同样的,位置漂移对于位置环的运算也是致命的,由于位置指令是以增量形式下发的,当不能保证每个Sync0周期能有固定次数的Eva周期时,观察位置环输出的速度值也是跳变的。
2. 解决方案EtherCAT总线解决了主站系统时间和各个从站Sync0信号的同步问题,即总线能够保证各个从站的Sync0信号能够根据主站的系统时间同时周期性的产生。
现在需要一套机制保证控制芯片的控制周期能和Sync0保证同步周期性产生。
EtherCAT主从同步方法
E t h e r C A T主从同步方法内部编号:(YUUT-TBBY-MMUT-URRUY-UOOY-DBUYI-0128)EtherCAT主从同步方法1. 时钟漂移问题如图所示,主站和从站通过EtherCAT总线连接,设主站的晶振频率为f0,从站1晶振频率f1,从站2晶振频率f2,假如在3个设备中同时设置一个定时长度为T的周期性定时器,由于晶振频率的微小差异,不可能使得3个设备同时完成定时器触发。
由于是周期性的,这微小的触发时间不一致会累积起来,直到出现质变例如在相同时间段内,主站出发了N次,从站1触发了M次,从站2触发了K 次。
以伺服驱动器为例:Sync0信号为1ms(过程数据交换周期也设为1ms)为周期的总线同步型号,Eva.T1CNT为从站DSP的控制周期计数器(0Max0为一个周期,设定为125us)。
由于Sync0信号跟随的是主站的系统时钟,Eva计数使用的是从站的晶振,因此它们所认为的时间长度T必然会有差异。
理论上来说,Eva的8个周期,125us*8=1ms应该和Sync0的产生周期1ms一致,但实际情况由上图可知,它们并不一致。
这种差异会累积起来,导致Eva的控制周期相对于Sync0产生漂移。
假设伺服驱动器中位置采样都在Eva.T1CNT=Max时进行,正常情况下1个Sync0周期内会进行8次位置采样,而由于漂移的问题,可能会产生9次位置采样。
这种情况对于主站来说是不可见的,主站依旧会认为获得的位置反馈为8次采样的值。
当对位置反馈值做微分获得速度值时,就可以看到速度会在9次位置采样时产生跳变。
同样的,位置漂移对于位置环的运算也是致命的,由于位置指令是以增量形式下发的,当不能保证每个Sync0周期能有固定次数的Eva周期时,观察位置环输出的速度值也是跳变的。
2. 解决方案EtherCAT总线解决了主站系统时间和各个从站Sync0信号的同步问题,即总线能够保证各个从站的Sync0信号能够根据主站的系统时间同时周期性的产生。
ethercat 入门 系统描述

EtherCAT 入门系统描述导言EtherCAT(以太CAT)是一种实时以太网通信协议,用于在工业自动化领域中,实现高性能、低延迟的实时控制系统。
本文将介绍EtherCAT的基本概念、工作原理、应用领域和入门实践,帮助读者对EtherCAT有一个全面的了解。
1. EtherCAT 概述EtherCAT是一种基于以太网的实时控制总线技术,由Beckhoff在2003年开发并发布。
EtherCAT使用一种分布式时钟同步方法,可以在微秒级实现通信,具有低延迟和高带宽的特点。
它通过实时以太网实现分布式控制器、设备和传感器之间的通信,并支持多种通信拓扑,如线性、环形和星形等。
2. EtherCAT 架构EtherCAT系统由主站和从站组成。
主站通常是一个工控机或PLC,负责发送和接收数据。
从站可以是各种类型的设备和传感器,如电机驱动器、温度传感器等。
主站通过EtherCAT总线将数据发送到从站,并从从站接收响应数据。
3. EtherCAT 性能特点3.1 高实时性EtherCAT通过一种优化的通信协议和分布式时钟同步机制,实现了高实时性的通信。
在EtherCAT网络中,从站可以将数据实时传输到主站,主站可以实时下发控制指令到从站,这使得EtherCAT非常适用于实时控制和反馈应用。
3.2 低传输延迟EtherCAT的通信延迟非常低,通常在微秒级别。
这主要得益于EtherCAT的传输方式,数据在从站上通过实时以太网线路进行处理,然后再通过总线传输到主站。
这种快速传输的特点使得EtherCAT在需要快速响应的应用中非常有用。
3.3 高带宽EtherCAT的带宽可以根据实际应用需求进行扩展,可以支持多个从站同时进行数据传输。
这使得EtherCAT在需要高带宽的应用场景中非常适用,如高速运动控制和大规模数据采集等。
4. EtherCAT 应用领域EtherCAT在众多工业自动化领域中得到广泛应用,以下是一些常见的应用领域:- 机床控制:EtherCAT可用于高精度和高速度的机床控制系统,通过将运动控制器和传感器连接到EtherCAT总线上,实现快速准确的运动控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ethercat 时钟同步原理
EtherCAT(Ethernet for Control Automation Technology)是一种开放式实时以太网通信协议,广泛应用于工控领域。
在EtherCAT 网络中,时钟同步是实现网络中各个节点之间协同工作的基础。
本文将介绍EtherCAT时钟同步的原理及其实现方法。
时钟同步是指网络中各个节点的时钟保持一致,确保节点之间的通信和协作能够精确无误地进行。
在EtherCAT网络中,时钟同步的目标是将所有从站节点的时钟与主站节点的时钟保持同步,以保证数据的准确性和实时性。
EtherCAT时钟同步采用了主站从站的结构,主站负责发送时钟同步数据包,从站接收并根据同步数据包调整自身的时钟。
具体实现时,主站在每个通信周期内发送一帧时钟同步数据包,从站在接收到该数据包后,通过校正自身的时钟,使其与主站的时钟保持同步。
EtherCAT时钟同步的实现依赖于一种称为“分布式时钟算法”的协议。
该算法基于主站发送的时钟同步数据包和从站的时钟信息,通过多轮迭代计算,不断调整从站的时钟,使其逐渐接近主站的时钟。
具体而言,分布式时钟算法包括以下几个步骤:
1. 主站发送时钟同步数据包:主站在每个通信周期内发送时钟同步数据包,其中包含了主站当前的时钟信息。
2. 从站接收时钟同步数据包:从站在接收到主站发送的时钟同步数据包后,获取其中的时钟信息。
3. 从站调整自身时钟:从站根据接收到的时钟同步数据包中的时钟信息,通过计算和调整自身时钟,使其与主站的时钟逐渐接近。
4. 多轮迭代计算:为了提高时钟同步的精确度,分布式时钟算法通常会进行多轮迭代计算,即主站发送多个时钟同步数据包,从站根据每个数据包的时钟信息进行多次调整。
通过以上步骤,EtherCAT网络中的各个从站节点可以与主站节点保持时钟同步,从而实现精确的数据通信和协同工作。
总结起来,EtherCAT时钟同步的原理是通过主站发送时钟同步数据包,从站接收并根据数据包中的时钟信息调整自身时钟,以实现网络中各个节点的时钟同步。
分布式时钟算法的多轮迭代计算确保了时钟同步的精确性和稳定性。
这种时钟同步机制使得EtherCAT网络能够高效可靠地运行,广泛应用于工控领域。