奇异值分解法计算广义逆
实验二奇异值分解法计算广义逆
实验二奇异值分解法计算广义逆
广义逆是一种可以使得A与其广义逆矩阵乘积仍为一个单位矩阵的矩阵。
对于一个非方阵A,我们可以使用奇异值分解来计算其广义逆矩阵
A^+。
具体计算过程如下:
1.对矩阵A进行奇异值分解,得到A=UΣV^T。
2.对Σ进行逆运算,得到Σ^(-1)。
3.将U和V^T进行转置,得到U^T和V。
4.计算广义逆矩阵A^+=VΣ^(-1)U^T。
这个计算过程的物理解释是:U和V分别表示了原始矩阵A的左奇异
向量和右奇异向量,Σ表示了奇异值的对角矩阵。
奇异值的倒数相当于
对矩阵的奇异值进行逆运算,将非零奇异值取其倒数,零奇异值保持不变。
而广义逆矩阵的计算则是通过右奇异向量V的转置和左奇异向量U的转置
乘以这些逆奇异值来得到。
奇异值分解方法计算广义逆的优点在于它能够处理各种类型的矩阵,
包括非方阵和奇异矩阵等。
同时,奇异值分解还具有数值稳定性好的特点,对于小奇异值可以有效地进行截断处理,避免了矩阵求逆时可能出现的数
值不稳定问题。
此外,奇异值分解还能够提供对矩阵的降维处理,通过选择较大的奇
异值,舍弃较小的奇异值,可以将矩阵维度降低,去除冗余信息。
这对于
处理高维数据和矩阵近似等问题非常有用。
综上所述,奇异值分解法是一种计算广义逆矩阵的有效工具。
它能够稳定地处理各类矩阵,并且具有降维的优势。
在实际应用中,我们可以利用奇异值分解来计算数据的广义逆矩阵,从而解决一些复杂的线性问题。
c++ eigen广义逆矩阵
c++ eigen广义逆矩阵在C++中使用Eigen库计算矩阵的广义逆可以通过以下步骤实现。
首先,确保你已经安装了Eigen库,并且在你的C++项目中包含了Eigen头文件。
然后,你可以使用Eigen库中的`JacobiSVD`类来计算矩阵的广义逆。
下面是一个简单的示例代码,演示了如何使用Eigen库计算矩阵的广义逆:cpp.#include <iostream>。
#include <Eigen/Dense>。
int main()。
{。
Eigen::MatrixXf A(2, 3);A << 1, 2, 3,。
4, 5, 6;Eigen::JacobiSVD<Eigen::MatrixXf> svd(A,Eigen::ComputeThinU | Eigen::ComputeThinV);Eigen::MatrixXf A_inv = svd.matrixV()Eigen::Vector3f(svd.singularValues().array().inverse()) svd.matrixU().transpose();std::cout << "The pseudo inverse of A is:\n" <<A_inv << std::endl;return 0;}。
在这个示例中,我们首先创建了一个2x3的矩阵A,并使用`JacobiSVD`类对其进行奇异值分解。
然后,我们使用奇异值分解的结果计算了矩阵A的广义逆,并将结果打印出来。
需要注意的是,这只是一个简单的示例,实际应用中可能需要根据具体情况进行调整。
希望这个示例能帮助到你理解如何在C++中使用Eigen库计算矩阵的广义逆。
广义逆矩阵的计算方法及意义
广义逆矩阵的计算方法及意义广义逆矩阵是矩阵理论中的一个非常重要的概念,它不仅在数值计算中具有重要意义,而且在优化理论、信号处理以及系统控制等领域也广泛应用。
本文将从广义逆矩阵的定义、计算方法及其意义等方面阐述这一重要概念。
一、广义逆矩阵的定义广义逆矩阵的定义是指,对于任意的一个矩阵A ∈ Rm×n,若存在一个矩阵A+ ∈ Rn×m,使得下列两个条件成立,即:A × A+ × A = AA+ × A × A+ = A+则称A+为A的广义逆矩阵。
其中,A+也满足下列两个条件:(A × A+)T = A × A+(A+ × A)T = A+ × A需要注意的是,如果A的列线性无关,则A+实际上就是A的逆矩阵。
二、广义逆矩阵的计算方法广义逆矩阵的计算方法有以下几种:(1)矩阵求导法矩阵求导法是一种比较简单的计算广义逆矩阵的方法。
它的基本思想是,将A与A的转置相乘,得到一个对称矩阵B,然后对B进行求导,最终就可以得到广义逆矩阵A+。
但是,这种方法的计算复杂度较高,适用范围也比较狭窄。
(2)奇异值分解法奇异值分解法是一种较广泛使用的计算广义逆矩阵的方法。
该方法的基本思想是,将A进行奇异值分解,得到A = UΣVT,然后对Σ进行逆运算,得到Σ+,最后通过A+ = VΣ+UT,就可以得到广义逆矩阵A+。
(3)正交交替投影法正交交替投影法是一种可以解决较大规模矩阵计算问题的方法。
该方法的基本思想是,通过Von Neumann展开,将广义逆矩阵的计算转化为一个正交投影问题,然后利用正交的性质以及平衡收敛的原理,不断迭代求解,最终得到广义逆矩阵A+。
三、广义逆矩阵的意义广义逆矩阵作为一种重要的矩阵理论工具,具有许多重要的应用意义,下面我们对其进行简单的介绍:(1)最小二乘法在数据处理的过程中,经常会出现数据不完备或者存在噪声的情况。
numpy奇异值分解,广义逆矩阵与行列式
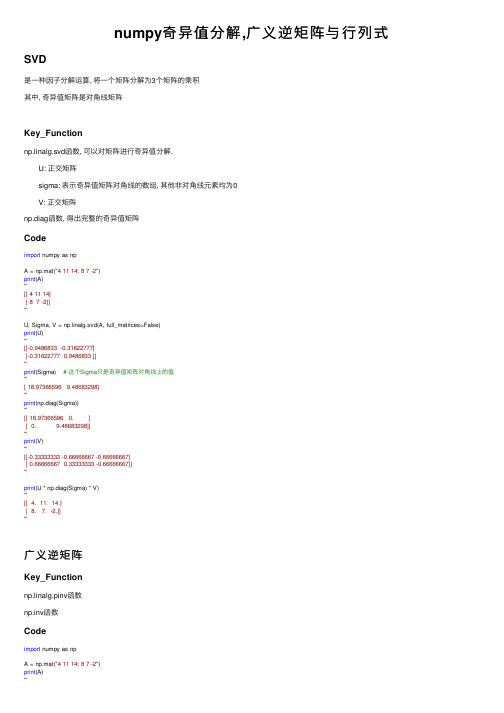
numpy奇异值分解,⼴义逆矩阵与⾏列式SVD是⼀种因⼦分解运算, 将⼀个矩阵分解为3个矩阵的乘积其中, 奇异值矩阵是对⾓线矩阵Key_Functionnp.linalg.svd函数, 可以对矩阵进⾏奇异值分解. U: 正交矩阵 sigma: 表⽰奇异值矩阵对⾓线的数组, 其他⾮对⾓线元素均为0 V: 正交矩阵np.diag函数, 得出完整的奇异值矩阵Codeimport numpy as npA = np.mat("4 11 14; 8 7 -2")print(A)'''[[ 4 11 14][ 8 7 -2]]'''U, Sigma, V = np.linalg.svd(A, full_matrices=False)print(U)'''[[-0.9486833 -0.31622777][-0.31622777 0.9486833 ]]'''print(Sigma) # 这个Sigma只是奇异值矩阵对⾓线上的值'''[ 18.97366596 9.48683298]'''print(np.diag(Sigma))'''[[ 18.97366596 0. ][ 0. 9.48683298]]'''print(V)'''[[-0.33333333 -0.66666667 -0.66666667][ 0.66666667 0.33333333 -0.66666667]]'''print(U * np.diag(Sigma) * V)'''[[ 4. 11. 14.][ 8. 7. -2.]]'''⼴义逆矩阵Key_Functionnp.linalg.pinv函数np.inv函数Codeimport numpy as npA = np.mat("4 11 14; 8 7 -2")print(A)'''[[ 4 11 14][ 8 7 -2]]'''pseudoinv = np.linalg.pinv(A)print(pseudoinv)'''[[-0.00555556 0.07222222][ 0.02222222 0.04444444][ 0.05555556 -0.05555556]]'''print(A * pseudoinv)'''⼗分接近单位矩阵[[ 1.00000000e+00 0.00000000e+00] [ 8.32667268e-17 1.00000000e+00]] '''数学概念⼴义逆矩阵的定义或者⼴义逆矩阵的求解⾏列式Key_Functionnp.linalg.det函数, 计算矩阵的⾏列式Codeimport numpy as npA = np.mat("3 4; 5 6")print(A)'''[[3 4][5 6]]'''print(np.linalg.det(A))# -2.0。
矩阵的广义逆行列式

矩阵的广义逆行列式
矩阵的广义逆行列式是指一个矩阵在广义逆的定义下所对应的行列式。
在线性
代数中,给定一个矩阵A,如果存在一个矩阵B使得AB和BA都是广义单位矩阵(设为I),则B被称为矩阵A的广义逆,记作A⁺。
对于一个矩阵A的广义逆行列式,我们可以通过以下步骤计算得出。
首先,我们需要求出A的广义逆矩阵A⁺,这可以通过奇异值分解(SVD)来得出。
将矩阵A
作SVD,可以得到矩阵A的奇异值分解形式为A = UΣV^T,其中U和V是正交矩阵,Σ是对角阵。
我们可以将矩阵Σ的对角元素进行求逆,得到Σ的伪逆矩阵Σ⁺。
然后,将U
和V^T进行转置操作,得到U^T和V的转置矩阵(V^T)^T=V,分别表示U和V的伪逆矩阵。
通过上述步骤,我们可以得到矩阵A的广义逆矩阵A⁺=VΣ⁺U^T。
最后,我
们可以计算矩阵A的广义逆行列式。
由于矩阵A⁺并不一定是方阵,所以其行列式并不能简单地通过行列式的计算公式求得。
因此,矩阵的广义逆行列式并不是一个常见或常规的矩阵特征。
在求解过程中,我们更关注广义逆矩阵A⁺的性质,如A⁺A和AA⁺的性质,以及广义逆在线性方程组求解、最小二乘问题等方面的应用。
总结而言,矩阵的广义逆行列式是一个复杂且非常规的特征,不能通过简单的
行列式计算公式直接求得。
对于矩阵A的广义逆行列式的计算,我们首先需要求
出A的广义逆矩阵A⁺,然后可以通过该矩阵的性质进行进一步的研究和应用。
第三章 广义反演法
(
3
4
3
)
T
2 3 F=U r U T = 1 r 3 1 3
1 3 3 5 -1 6 6 5 -1 6 6 1
数据分辨矩阵性质: 1. 主对角要素表明理论数据与观测数据之 间的逼近程度。纯欠定情况下的数据分辨力 最高; 2. 数据分辨矩阵与观测数据无关,只与核 函数(系数矩阵)和先验信息相关。
第二节 奇异值分解和自然逆
奇异值分解: 奇异值分解:SVD(singular value decomposition) ( )
1. G是M阶实对称、非奇异矩阵
G = UΛU
T
U T U = UU T = E
λ1 L L λ2 Λ= O 0 0 λM
U是G的M个特征向量组成的特 是 的 个特征向量组成的特 征向量矩阵, 征向量矩阵,正交矩阵 Λ是G的M个特征值组成的对角 是 的 个特征值组成的对角 线矩阵
−1 T µ m=G L d=Vr Λ r U r d
T −1 T $ µ d=Gm=GG L d=U r Λ r Vr Vr Λ r U r d
F = Ur U
T r
M阶 阶
纯欠定: 纯欠定: F = U r U T =I M r
m1 + m2 = 3 m3 = 3
m= 3
1 0 Ur = 0 1
第五节 参数分辨矩阵
参数分辨矩阵: 参数分辨矩阵:parameter resolution matrix
µ m=G L d=G L Gm
µ Λ −1U T U Λ V T m m=Vr r r r r r
T r r
R =VV
三矩阵相乘的广义逆 -回复
三矩阵相乘的广义逆-回复三矩阵相乘的广义逆,其实指的是当三个矩阵A,B,C满足一定条件时,如何求得一个矩阵X,使得AXC=B成立。
这个问题在数学和工程领域中都有广泛的应用,比如在线性代数、信号处理、图像处理等领域中都会遇到。
接下来,我将分步回答这个问题。
首先,我们先来了解一下什么是矩阵的广义逆。
对于一个矩阵A,如果存在一个矩阵X,使得AXA=A,并且满足一定的附加性质,那么我们称X 为A的广义逆。
也就是说,广义逆是一个使得矩阵乘法满足类似于元素乘法的逆的性质的矩阵。
接下来,我们来详细讨论三矩阵相乘的广义逆的求解过程。
假设我们已经有了三个矩阵A,B和C,我们要求解一个矩阵X使得AXC=B成立。
第一步是判断是否存在广义逆。
根据矩阵乘法的性质,如果存在广义逆矩阵X,那么必须满足A的列空间与C的行空间相互垂直,且A的行空间与C的列空间相互垂直。
也就是说,A的列空间与C的行空间是互补的,同时A的行空间与C的列空间也是互补的。
第二步是求解广义逆。
我们可以使用SVD(奇异值分解)来求解三矩阵相乘的广义逆。
SVD将矩阵A分解为三个矩阵的乘积,即A=UΣV^T,其中U和V是正交矩阵,Σ是奇异值矩阵。
接下来,我们可以根据SVD分解得到的U、Σ、V^T来求解广义逆。
首先,我们可以将Σ矩阵中非零奇异值的逆取出,得到矩阵Σ^+。
然后,我们可以通过将U的前k列按照奇异值的倒数进行缩放并保留V^T的前k行,得到一个矩阵X^+,即X^+ = V_kΣ_k^+U_k^T。
最后一步是验证广义逆。
我们将计算出来的广义逆矩阵X^+带入原始等式AXC=B中,如果AX^+C与B的差异在误差范围内,那么我们可以认为X^+是AXC=B的解的广义逆。
总结起来,求解三矩阵相乘的广义逆可以按照以下步骤进行:首先判断是否存在广义逆,然后使用SVD分解矩阵A,接着根据分解结果求解广义逆,最后验证求解出的广义逆是否满足等式AXC=B。
三矩阵相乘的广义逆在实际应用中非常重要。
线性代数中的广义逆
线性代数中的广义逆线性代数中的广义逆是一种特殊的矩阵运算,它在解决线性方程组、最小二乘问题以及矩阵逆的计算中具有重要作用。
本文将详细介绍广义逆的定义、性质和应用,以加深对该概念的理解。
一、广义逆的定义与性质广义逆是针对非方阵而言的。
对于一个m×n的矩阵A,在矩阵A的扩展实数域中,若存在一个n×m的矩阵B,使得AB和BA均为投影矩阵,则称B为A的广义逆,记作A^+。
广义逆具有以下性质:1. 幂等性:(A^+)^+ = A^+2. 逆性:(AB)^+ = B^+A^+3. 秩性:(A^+)A和A(A^+)的秩相等4. 唯一性:若A^+和B^+都是A的广义逆,则A^+ = B^+二、广义逆的应用广义逆在线性方程组的求解中扮演着重要角色。
对于一个m×n的线性方程组Ax=b,其中A为系数矩阵,x为未知数向量,b为已知向量。
若A的行秩等于列秩,则该方程组有唯一解。
然而,在实际问题中,方程组常常出现行秩小于列秩的情况,此时无法直接求解。
利用广义逆的概念,我们可以构造最小二乘解。
最小二乘解是指使得||Ax-b||^2(欧氏范数下的二范数)最小的解。
通过广义逆的求解方法,可以找到最接近方程组Ax=b的解x*,即使得||Ax*-b||^2取得最小值。
特别地,当A的列秩等于n(A是满秩列)时,最小二乘解与精确解重合。
广义逆还在矩阵逆的计算中起到重要作用。
当方阵A不可逆时,可以使用广义逆来近似计算逆矩阵。
通过广义逆的逆性质,我们可以得到A的近似逆矩阵A^+的逼近解析表达式。
三、广义逆的计算方法1. 伪逆法:通过奇异值分解(SVD)求解广义逆,即A^+=VΣ^+U^T,其中U、Σ、V分别是A的左奇异向量矩阵、对角奇异值矩阵和右奇异向量矩阵。
2. 矩阵分块法:将矩阵A分块,利用分块矩阵性质求解广义逆。
3. Moore-Penrose逆矩阵:Moore-Penrose逆矩阵是一种特殊的广义逆矩阵,是广义逆的一种常用表示形式。
实验二:奇异值分解法计算广义逆
T V N N
其中
S2 Sr 0 0 0 0
S N N
任意矩阵G的广义逆 由于 U ,V 均为正交矩阵,即有
U T U UU T I , V TV VV T I U 1 U T , V 1 V T
所以,由可求得任意矩阵 G 的 Moore-Penrose 广义逆为
下面说明编译时所要做的初始化工作: 1、首先要输入奇异方程的系数矩阵、右端向量,以及方程的 维数。例如:你要求一个如下4*3阶奇异方程组的解:
1 1 1 2 2 1 0 x1 3 x2 1 1 0 1 x3 1 2 1 4
The solution to the least squares problem is: x( 1)= -0.119048D+01 x( 2)= 0.952381D+00 x( 3)= -0.666667D+00 Mat A++ is: 0.425197D+01 -0.626012D+00 0.851870D+01 -0.980791D-02 0.200492D+01 -0.588283D+01 -0.168396D+01 0.904258D+00 -0.550526D+01 -0.833679D+00 0.742121D+00 -0.342473D+01
在 matrix.par参数文件中输入将要求解的方程组的维数、系 数、右端项和计算误差限等,本例中为:
4 3
1 2 1 1 1 -1 0
//4*3维系数矩阵
-1 0 1 //矩阵个元素的值
奇异值分解的数值计算方法探析(五)
奇异值分解(Singular Value Decomposition,缩写为SVD)是一种重要的数值计算方法,广泛应用于数据降维、矩阵逆、特征分解等领域。
本文将对奇异值分解的数值计算方法进行探析,包括其数学原理、计算步骤以及在实际应用中的一些注意事项。
一、奇异值分解的数学原理奇异值分解是将一个任意形状的矩阵分解为三个矩阵的乘积,即A = UΣV^T,其中A是一个m×n的矩阵,U是一个m×m的正交矩阵,Σ是一个m×n的对角矩阵,V^T是一个n×n的正交矩阵。
在奇异值分解中,U和V分别是AAT和ATA的特征向量矩阵,Σ的非零元素是AAT或ATA的特征值的平方根。
通过奇异值分解,我们可以得到矩阵A的奇异值(Singular Values)、左奇异向量(Left Singular Vectors)和右奇异向量(Right Singular Vectors)。
二、奇异值分解的计算步骤1. 首先,我们需要对原始矩阵A进行奇异值分解。
将AAT或ATA进行特征值分解得到特征值和特征向量,然后从特征值和特征向量中构造出奇异值分解的三个矩阵U、Σ和V^T。
2. 接下来,我们需要对奇异值进行排序,通常按照降序排列。
3. 最后,我们可以选择保留前k个奇异值,将其对应的列向量构成Uk、Σk 和Vk^T,从而实现对原始矩阵的近似表示。
三、奇异值分解的数值计算方法在实际计算中,奇异值分解通常通过各种数值计算方法来实现。
常见的数值计算方法包括基于Jacobi迭代的方法、基于幂法的方法、基于分解法的方法等。
这些方法各有优缺点,需要根据具体情况选择合适的方法。
四、奇异值分解在实际应用中的注意事项在实际应用中,奇异值分解有一些需要注意的事项。
首先,由于奇异值分解会涉及到矩阵的特征值分解,因此对于大规模矩阵,计算量可能会非常大,需要考虑计算效率的问题。
其次,奇异值分解对数据的缩放和中心化非常敏感,因此在进行奇异值分解之前,需要对数据进行预处理。
矩阵广义逆求法

利用奇异值分解求A +的简化步骤: 1)求出A H A的r个非零特征值1, , r , i 0; 2)求出A H A对应于特征值1, , r的标准正交特征向量
1 , , r .令V1 =(1 , , r );
1-1 H H + 3)则A V1 V1 A r-1
上述定理可简化:
Sr 定理3:设A C ,在A奇异值分解A=U 0 令V=(x1 , , x r ,x r 1 , ,x n )=(V1 ,V2 ).则
mn r
0 H V 中 0
1-1 H H + A =V1 V1 A . r-1
54 75 33 1 32 43 21 则A + =CH (CCH ) 1 (BH B) 1 BH 234 130 182 78 34 53 15
3 1 2)因B列满秩,B =(B B) B = (1,3) (1,3) (1,3). 10 1
1 2 1 解:A 0 1 -1 0 1 -1 1 2 1 B= 2 5 ,C= 0 4 9 5 1 0 3 -3 4 0 1 -1 4 ,令 4 0 0 0 0 0 3 -3 . 1 -1 4
第三节
A+的几种求法
一、满秩分解求A+
定理1:设A Cmn,满秩分解为A=BC,其中B Cmr , C Crn,则 r r r A+ =CH (CCH )1 (BH B)1 BH CH ( BH ACH )1 BH .
证明:因为r(CC H ) r (BH B) r , 所以方阵CC H与BH B可逆. 只需验证上述A +满足Penrose四个方程:如 AXA=AC H (CC H ) 1 (BH B) 1 BH A=BCC H (CC H ) 1 (BH B) 1 BH BC =BC=A. AX BCC H (CC H ) 1 (BH B) 1 BH B(BH B) 1 BH , 所以( AX ) H AX . 类似可证其他两个方程.
广义逆矩阵的性质及其求解
广义逆矩阵的性质及其求解在线性代数中,广义逆矩阵是指在非方形矩阵的逆不存在的情况下,可被用来解出线性方程组的伪逆矩阵。
与逆矩阵相似,广义逆矩阵同样有着许多重要的性质。
本文将介绍广义逆矩阵的定义、性质以及其求解方法。
定义设非方形$m\\times n$矩阵A,则A的广义逆矩阵A+是满足下列条件的矩阵:1.AA+A=A2.A+AA+=A+3.(AA+)H=AA+4.(A+A)H=A+A其中,A H表示矩阵A的共轭转置,A+也称为Moore-Penrose逆。
性质广义逆矩阵A+拥有以下重要性质:1.AA+A和A+AA+都是对称矩阵。
2.如果A是列满秩的,则A+=A T(AA T)−1。
3.如果A是行满秩的,则A+=(A T A)−1A T。
4.(A+)+=A。
5.如果Ax=b有解,则x=A+b是Ax=b的解。
如果b在A的列空间内,则x是Ax=b的最小范数解。
6.如果Ax=b有多个解,那么最小范数解为x=A+b+(I−A+A)z,其中z为任意向量。
除此之外,广义逆矩阵还拥有一些其他的性质和应用,如计算矩阵的秩、估计多元回归系数、解决最小二乘问题等。
但需要注意的是,广义逆矩阵不是唯一的。
不同的求解方法可能得到不同的结果,因此在实际应用中需要谨慎处理。
求解方法现在我们来介绍一些求解广义逆矩阵的方法:SVD分解最常用的方法是奇异值分解(SVD)。
一个非零矩阵A可以被分解为$A=U\\Sigma V^H$,其中U和V都是酉矩阵,$\\Sigma$是对角矩阵。
$\\Sigma$ 的对角线上的元素称为A的奇异值。
根据SVD,$A^+=V\\Sigma^{-1}U^H$,可以直接求得广义逆矩阵。
QR分解QR分解是另一种求解广义逆矩阵的方法。
假设非方形矩阵A可以分解为一个正交矩阵Q和一个上三角矩阵R的乘积,即A=QR。
则A+= (QR)+=(R T Q T)+=(R+Q T),其中R+是矩阵R的广义逆矩阵。
伪逆矩阵的定义式对于$m\\times n$的矩阵A来说,其广义逆矩阵的定义式是:$$ A^+ = \\lim_{\\epsilon\\rightarrow 0}(A^TA+\\epsilon I)^{-1}A^T $$这里$\\epsilon$是任意小的正数,I是单位矩阵。
奇异值分解与广义逆
奇异值分解与广义逆在数学领域中,奇异值分解(Singular Value Decomposition,简称SVD)和广义逆(Generalized Inverse)是两个非常重要的概念。
它们在矩阵理论、信号处理、机器学习等领域都有着广泛的应用。
本文将深入探讨奇异值分解和广义逆的定义、性质以及应用方面的相关知识。
一、奇异值分解奇异值分解是将一个矩阵分解为三个矩阵相乘的形式,其形式为:A = UΣV^T,其中A是一个m×n的矩阵,U是一个m×m的正交矩阵,V是一个n×n的正交矩阵,Σ是一个m×n的对角矩阵,对角线上的元素称为奇异值。
奇异值分解有以下几个重要性质:1. 对于任意的矩阵A,都存在奇异值分解。
2. 奇异值分解是唯一的。
3. 奇异值的数量等于矩阵的秩。
奇异值分解在信号处理中有着广泛的应用,例如图像压缩、数据降维等。
通过保留最重要的奇异值,我们可以在减少数据维度的同时尽可能保持原有信息的完整性。
二、广义逆在矩阵理论中,对于一个非方阵A,如果存在一个矩阵B,使得AB = I,其中I为单位矩阵,则称B为A的广义逆。
广义逆在求解线性方程组、最小二乘问题等方面有着重要的应用。
广义逆的计算方法有多种,其中比较常用的有Moore-Penrose广义逆和Drazin广义逆。
Moore-Penrose广义逆在给定的约束条件下具有唯一性,而Drazin广义逆则具有更广泛的适用性。
广义逆的应用非常广泛,例如在求解超定方程组时,我们可以使用广义逆来得到最小二乘解;在求解最优控制问题中,广义逆可以用于求解系统的逆传递函数。
三、奇异值分解与广义逆的关系奇异值分解与广义逆之间存在紧密的联系。
对于任意的矩阵A,可以使用奇异值分解将其表示为A = UΣV^T的形式。
那么我们可以将广义逆定义为A的右侧矩阵V的转置与奇异值矩阵Σ逆的乘积,即A^+ = VΣ^+U^T。
其中Σ^+为奇异值矩阵Σ的伪逆矩阵。
SVD(奇异值分解)算法及其评估

同理如果将 V 划分为以下的形式 V = (V1 , V2 ) 其中 V1 为 n × r 的矩阵,则 V1 的列向量构成矩阵 A 的行空间的正交向量
⊥ 基。且 RA = V1V1T 为投影到矩阵 A 的行空间上的正交投影算子;而 RA = V2V2T 则是到矩阵 A 行空间的正交补空间上的投影。 (3) 最小二乘法问题(LS 问题)
i =1 r
其中 ( A) , ( A) 分别指得是 A 的零空间和值域。 为了方便,我们采用如下表示奇异值的记号: σ i ( A)=A 的第 i 大奇异值;
σ max ( A)=A 的最大奇异值; σ min ( A)=A 的最小奇异值。
现在来考察矩阵奇异值的几何意义[1,2],不妨设 m = n ,此时有 En =∈ y Cn : y = Ax, x ∈ C n , x 2 = 1
SVD(奇异值分解)算法及其评估 本文第一部分对 SVD 进行了简单的介绍,给出了定义和奇异值分解定理;第二 部分简要地列举了 SVD 的应用;第三部分则构造和分析了各种求解 SVD 的算法, 特别对传统 QR 迭代算法和零位移 QR 迭代算法进行了详细完整的分析;第四部分 给出了复矩阵时的处理办法;第五部分是对各种算法的一个简要的总结。 一、 SVD 简介
首先来对 SVD 算法的发展来做简单的回顾[11,12]:关于 SVD 算法的研究最早 可以追溯到 1873 年 Beltrami 所做的工作, 这中间在理论方面进行了大量的工作, 这 个历史过程可以参考 Stewart 的文献[8]。 但是直到 1965 年 Golub 和 Kahan 才在 SVD 的数值计算领域取得突破性进展[9],并且于 1969 给出了比较稳定的算法[10](以下 简称传统 QR 迭代算法) ,这也是后来在 LINPACK 中所采用的方法[3]。它的中心思 想是用正交变换将原矩阵化为双对角线矩阵,然后再对双对角线矩阵迭代进行 QR 分解。 六十年代一份没有出版的技术报告中,Kahan 证明了双对角线矩阵的奇异值可 以精确地计算,具有和原矩阵元素的相对的精确度;进一步,1990 年 Demmel 和 Kahan 给出了一种零位移的 QR 算法(zero-shift QR algorithm),这种算法计算双对角 矩阵的奇异值具有很高的相对精度[13],并且由此得到的奇异向量也具有很高的精 度[14]。 Fernando 和 Parlett 在 1994 年将 qd 算法应用到奇异值的计算上,从而得到了一 种全新的比 zero-shift QR algorithm 更加精确和快速的计算奇异值的算法[15,16]。 而 Demmel 和 Veselic 在文献[17]中则说明了用 Jacobi 方法与其它方法相比计算 所得到的奇异值和奇异向量具有更高的精度,可惜 Jacobi 算法比 DK 算法速度要慢 的多;在文献[18]中对 Jacobi 方法进行了改进使得其在速度上几乎和 DK 算法相当。 和 Strassen 算法类似,SVD 问题也有快速的分而制之算法,在文献[19,20]对其 有详细的介绍, 由此得到的算法在总计算量上比现有的 LAPACK 软件包中所采用的 方法要少的多。 在文献[21,22]中给出的 bisection 算法也可以对双对角线矩阵计算得到具有相对 精度的全部奇异值。 以下就开始对各种算法原理进行详细说明,并分析它们的计算量,计算的精确 度,以及所占得内存。
计算广义逆at(2),s的初等变换法
计算广义逆at(2),s的初等变换法
广义逆是线性代数中的一个重要概念。
在矩阵论中,矩阵的广义逆也称为伪逆,它是一个矩阵的逆在广义上的扩展,使得它在一定程度上可以替代矩阵的逆。
广义逆可以应用于许多领域,如数学、工程、物理等。
在这里,我们将介绍如何使用初等变换法计算一个矩阵的广义逆。
给定一个矩阵A,我们可以通过以下步骤计算出它的广义逆:
1. 首先,我们需要计算出矩阵A的奇异值分解(SVD),将其写成以下形式:
A = UΣV^T,其中U和V是正交矩阵,Σ是对角矩阵,其对角线上的元素为矩阵
A的奇异值。
2. 接下来,我们需要对Σ进行修改,以便得到A的广义逆。
对于每个奇异值,我们将其倒数取倒数,并将所有非零值取倒数,得到一个新的对角矩阵Σ^+。
然后,我们可以将Σ^+与U和V^T相乘,得到矩阵A的广义逆A^+ = VΣ^+U^T。
3. 最后,我们需要对A的广义逆进行验证,以确保它满足广义逆的性质。
例如,对于任意矩阵A,A^+A和AA^+都应该是投影矩阵,且它们应该具有相同的秩。
使用初等变换法计算矩阵的广义逆需要一定的数学知识和技巧,但它可以在许多应用中发挥作用。
奇异值分解法计算广义逆
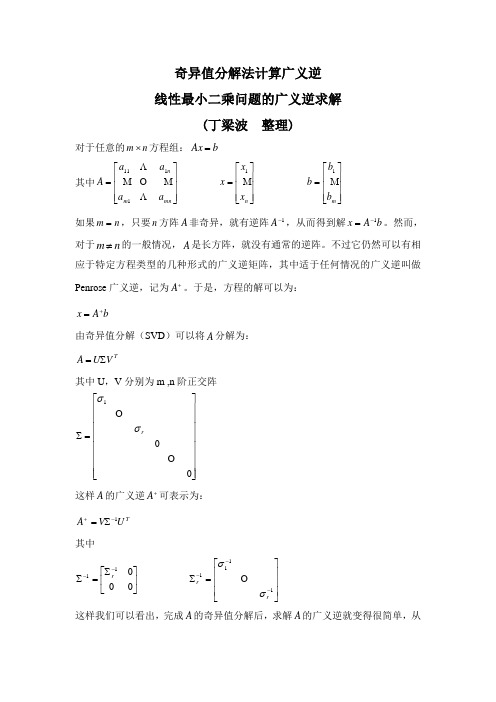
奇异值分解法计算广义逆 线性最小二乘问题的广义逆求解(丁梁波 整理)对于任意的n m ⨯方程组:b Ax =其中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=mn m n a a a a A 1111 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=n x x x 1 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=m b b b 1 如果n m =,只要n 方阵A 非奇异,就有逆阵1-A ,从而得到解b A x 1-=。
然而,对于n m ≠的一般情况,A 是长方阵,就没有通常的逆阵。
不过它仍然可以有相应于特定方程类型的几种形式的广义逆矩阵,其中适于任何情况的广义逆叫做Penrose 广义逆,记为+A 。
于是,方程的解可以为:b A x +=由奇异值分解(SVD )可以将A 分解为:T V U A ∑=其中U ,V 分别为m ,n 阶正交阵⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=∑001r σσ这样A 的广义逆+A 可表示为:T U V A 1-+∑=其中⎥⎦⎤⎢⎣⎡∑=∑--00011r⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=∑---1111r r σσ这样我们可以看出,完成A 的奇异值分解后,求解A 的广义逆就变得很简单,从而可以方便地求出方程组的最小二乘解。
下面我们说明对矩阵进行奇异值分解的方法和步骤。
通常情况下我们考虑m>n 时矩阵A 的奇异值分解,因为当m<n 时,可以将n-m 行补零使其成为方阵后再进行分解。
这样我们就将矩阵A 的奇异值分解分为两大步,若干小步如下:一.用Householder 变换将A 约化为双对角矩阵。
具体步骤如下: 1. 以A 的第1列作为v ,取i=1,按下列式子构造Householder 矩阵Q 式中i H 为Q ,为了方便以后的说明我们还用i H 表示2/122)(1)(12)(22)(),,,,0,0(),,,)(,,0,0()1(∑=++==+=-=mi k k i T m i i i T m i i i i i iT i i i v vv v v v v v v v sign v u u u u I H 其中,2. 将Q 1左乘A 得到矩阵Q 1 A ,并以Q 1 A 的第1行作为v ,取i=2,按(1)式构造Householder 矩阵H 2, 右乘Q 1A 得到Q 1A H 2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
奇异值分解法计算广义逆 线性最小二乘问题的广义逆求解
(丁梁波 整理)
对于任意的n m ⨯方程组:b Ax =
其中⎥⎥
⎥⎦
⎤
⎢⎢⎢⎣⎡=mn m n a a a a A 1111 ⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡=n x x x 1 ⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡=m b b b 1 如果n m =,只要n 方阵A 非奇异,就有逆阵1-A ,从而得到解b A x 1-=。
然而,对于n m ≠的一般情况,A 是长方阵,就没有通常的逆阵。
不过它仍然可以有相应于特定方程类型的几种形式的广义逆矩阵,其中适于任何情况的广义逆叫做Penrose 广义逆,记为+A 。
于是,方程的解可以为:
b A x +=
由奇异值分解(SVD )可以将A 分解为:
T V U A ∑=
其中U ,V 分别为m ,n 阶正交阵
⎥⎥⎥
⎥⎥⎥⎥⎥⎦
⎤
⎢⎢⎢⎢⎢
⎢⎢⎢⎣
⎡=∑001
r σσ
这样A 的广义逆+A 可表示为:
T U V A 1-+∑=
其中
⎥⎦
⎤⎢
⎣⎡∑=∑-
-0001
1
r
⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡=∑---1111r r σσ
这样我们可以看出,完成A 的奇异值分解后,求解A 的广义逆就变得很简单,从
而可以方便地求出方程组的最小二乘解。
下面我们说明对矩阵进行奇异值分解的方法和步骤。
通常情况下我们考虑m>n 时矩阵A 的奇异值分解,因为当m<n 时,可以将n-m 行补零使其成为方阵后再进行分解。
这样我们就将矩阵A 的奇异值分解分为两大步,若干小步如下:
一.用Householder 变换将A 约化为双对角矩阵。
具体步骤如下: 1. 以A 的第1列作为v ,取i=1,按下列式子构造Householder 矩阵Q 式中i H 为Q ,为了方便以后的说明我们还用i H 表示
2
/122
)
(1)(12
)(22
)(),,,,0,0(),,,)(,,0,0()
1(∑=++==+=-
=m
i k k i T m i i i T m i i i i i i
T i i i v v
v v v v v v v v sign v u u u u I H 其中,
2. 将Q 1左乘A 得到矩阵Q 1 A ,并以Q 1 A 的第1行作为v ,取i=2,按(1)式构造Householder 矩阵H 2, 右乘Q 1A 得到Q 1A H 2。
3. 取Q 1A H 2的第2列为v ,i=2,按(1)式构造Householder 矩阵Q 2,左乘Q 1A H 2,得到Q 2 Q 1A H 2,并将计算Q 2 Q 1将其存入Q 1。
4. 取Q 2 Q 1A H 2的第2行为v ,i=3,按(1)式构造Householder 矩阵H 3,右乘Q 2 Q 1A H 2,得到Q 2 Q 1A H 2 H 3,并将H 2 H 3存入H 2。
5. 依次类推,计算出Q n Q n-1…Q 1AH 2 H 3…H n-1为双对角矩阵,并将Q n Q n-1…Q 1存入到Q 1中,H 2 H 3…H n-1存入到H 2 中。
Q n Q n-1…Q 1AH 2 H 3…H n-1为双对角矩阵记为:
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎢
⎢⎢⎢⎢⎣
⎡=-00
01
3
22
1
n n n B βγβγβγβ
需要注意的是:当n m =时,只计算到Q n-1…Q 1AH 2 H 3…H n-2
二.用原点位移QR 算法进行迭代,计算所有的奇异值,并最终结合(一)计算出出U 和V 。
1. 按下式列旋转矩阵H 0
⎥⎥
⎥
⎥⎥
⎥⎦
⎤⎢⎢⎢⎢⎢⎢⎣⎡-=11
0 c s s c H (2) 式中
()
(
)
[]
2
/121
2
2
2
1
21222121222
122112
2212142
121//-----+--+-+++==-=+===n n n n n n n n n n r r
s r c γ
γγβγβγβγβσγβξσβξξξξξ
并将计算BH 0
2. 按下式构造列旋转矩阵
⎥⎥
⎥
⎥⎥
⎥⎦
⎤⎢⎢⎢⎢⎢⎢⎣⎡-=11
1 c s s c Q 并计算Q 1 BH 0 3. 构造列旋转矩阵
⎥⎥
⎥⎥
⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-=1111 c s s c H
并计算Q 1 BH 0H 1以及H 0H 1
4. 构造列旋转矩阵
⎥⎥
⎥⎥
⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-=1112 c s s c Q
并计算Q 2 Q 1 BH 0H 1以及Q 2 Q 1
5. 按类似(3),(4)的方法构造列旋转矩阵,并计算相应的新矩阵Q i …Q 2 Q 1 BH 0H 1
…
H i-1,
直
到
i=n
,
并
记
1
21
1Q Q Q Q n =,
11011-=n H H H H ,110121
11-==n n H H BH Q Q Q Q B 即11
111BH Q B = 6. 判断B 1的次对角线元素是否在误差范围内可以认为是0,若是则分解完毕,若否,则将B 1作为上面的B 重复步骤1,2,3,4,5,6。
直到B k 可以近似看作是对角阵。
即:11111-----=k k k k k k H B Q B
记112211Q Q Q Q k k --=,112211--=k k H H H H
则B k 的对角线元素就是矩阵A 的奇异值,即T V U A ∑=中的∑已经求得,从上面的过程中我们可以将A 按下面的式子进行分解:
21HH QB Q A k =
对比T V U A ∑=,k T
T
B H H V Q
Q U =∑==21,
这样我们就完成了矩阵A 的奇异值分解,由于U 和V 都是正交阵,我们能够得到A 的广义逆+A ,从而可以根据下列公式计算方程组的最小二乘解:
b A x +=
程序说明:
程序共有一个主程序MAIN.FOR和三个主要功能子程序:
MAIN.FOR—主要功能有:方程组的初始化,输出系数矩阵及其广义逆、广义逆法的最小二乘解以及逆的逆对方法进行验证。
BMUA V.FOR—程序的核心部分,奇异值分解程序,输入系数矩阵,输出分解后的U,V,∑
AGMIV.FOR—计算广义逆+A以及方程组的最小二乘解
BGINV.FOR—仅计算广义逆+A
另外还有一个奇异值分解的辅助小程序SSS.FOR。