第十章 航空摄影测量外业PDF
《无人机数字航空摄影测量与遥感外业技术规范》标准文本-终版
2014 - 12 - 10 发布
2015 - 01 - 10 实施
广东省高端新型电子信息产业技术标准联盟 发 布
GDEILB 007—2014
目次
前言 ................................................................................ II 1 范围 .............................................................................. 1 2 规范性引用文件 .................................................................... 1 3 术语和定义 ........................................................................ 1 4 外业技术流程 ...................................................................... 2 5 前期资料搜集要求 .................................................................. 3 6 现场勘踏要求 ...................................................................... 3 7 技术设计书编写要求 ................................................................ 3 8 航拍实施要求 ...................................................................... 3 9 控制点测量要求 .................................................................... 4
航空摄影测量技术

1:1000
1:2000 1:5000 1:10000
7~14
14~28 20~40 40~80
中比例尺
1:10000~1:20000 1:20000~1:32000
小比例尺
1:25000~1:60000
1:50000
1:25000
1:50000
50~120
70~160
航摄分区的划分 航摄分区的划分
航摄准备
摄区基本情况分析
1. 航摄准备
2. 航摄设计
航摄设计资料准备 航摄空域申请 《航空摄影技术设计书》
3. 空中采集
4. 数据处理
5. 质量检查
6. 成果提交
航摄设计
1. 航摄准备
2. 航摄设计
地面分辨率GSD确定 点云间隔确定 航摄分区的划分 基准面高度的确定 航线的敷设 航摄基本参数的计算 航摄季节和时间的选择 航摄仪的选择与检定
其它
不定期地球观测、空间实验 各种调查(气象等) 侦察、大范围调查 各种调查、航空摄影测量 空中侦察、航空摄影测量 各种调查、航空摄影测量 各种调查、航空摄影测量 各种调查、航空摄影测量 各种调查 遗址调查 地面实况调查 地面实况调查 飞机、直升机 牵引滑翔机
车载升降台
中比例尺 小比例尺
1:10000~1:20000
1:20000~1:32000
1:5000
1:10000
20~40
40~80
1:25000~1:60000
1:50000
1:25000
1:50000
50~120
70~160
航摄影像概念
1 2 3
第十章 航空摄影测量的基本知识
(3)倾斜像片在水平像片上面部分, δ a为负(因为rc>r),即像点向辐 射中心位移,反之,在水平像片下面部分, δ a为正(rc<r),像点向边缘位 移对称于等角点的像点,其倾斜误差的大小相等,符号相反。 (4)地面上的图形在水平像片上所得的影像与地面图形完全相似,而在倾 斜像片上则会变形。如图10-7, a1b1c1d1为地面正方形ABCD在水平像片上的图像, 是一缩小了的正方形。若将倾斜像片(参见图10-6)绕hchc转a角使与水平像片 迭置,则在倾斜像片上的图形a2b2C2d2变为梯形。因此,即使在同一张倾斜像片 上各处比例尺都不一致。
二、航摄像片与地形图的差别
航摄像片是地面的中心投影,地形图则 是地面在水平面上的垂直投影,因而两 者产生了差异。航空摄影测量测制地形 图的主要任务就是将中心投影的航摄像 片转化为垂直投影的地形图。了解中心 投影的特征和两种投影造成的差异,是 学习航测原理的基础。
地形图是利用平行光束对物体垂直投影到水平面上,缩小后获得物 体的位置。因此,投影面上任意两点间的距离与相应空间两点间的水平 距离之比是厂个常数,即测图比例尺。 航摄像片是地面的中心投影,当被摄的地面呈水平状态和摄影的像 片处于水平位置时,像片上图像的形状与地面上的形状完全相似,此时 航摄像片具有平面图的性质。像片上任意两点的距离与地面相应两点的 距离的比值也是常数,由图10-4中相似三角形的关系,可得出航摄像片 的比例尺等于f比H(f为航摄仪的焦距,H为航高)如果把航摄像片再经 过一定比例尺的缩放,并在缩放的像片上注记村庄、道路、房屋、河流 等地物的名称,就可成为一张像片平面图,而且这种平面图比用白纸测 的平面图更真实、更形象。但摄影时飞行高度可能有变化,航高H随之 变化,地面也有高低起伏,即使在一张像片上比例尺也各处不同;同时 摄影时,像片也可能不水平,地面点在像片上的位置将产生位移,像片 上的影像,就失去平面图的性质。
低空数字航空摄影测量外业规范
mq
n3 + 23n +100
…………………… (A.2)
¾相关参数(表A.1)
:
¾航向重叠按65%计算; ¾1:500、1:1 000、1:2 000成图比例尺时的航摄地面分辨率分别按0.05m、0.1m 和0.2m计算,并据此计算成图放大倍率和相对航高;
¾视差量测的单位权中误差mq按0.005mm计算。
• 当控制点的平面位置由内业加密完成,高程部分由全野外施测 时,下图中的平高控制点可改为高程控制点。
全野外布点
¾区域网布点
• 基本原则:区域网的划分应依据成图比例尺、地面分辨率、测区 地形特点、摄区的实际划分、图幅分布等情况全面进行考虑,根 据具体情况选择最优实施方案。区域网的图形宜呈矩形或方形; 区域网的大小和像控点之间的跨度以能够满足空中三角测量精度 要求为原则,主要依据成图精度、航摄资料的有关参数及对系统 误差的处理等多因素确定。
对于采用独立坐标系的小测区,也可以布设5″级小三角网和导线网 作为像片平面控制测量的基础。
其他方法:也可采用GPS静态测量的方式进行基础控制测量,可充分 利用各地的CORS网和似大地水准面模型精化成果。相关要求参照GB/T 18314中E级及以上GPS点测量的规定。
5 像片控制点测量
¾精度要求
平面中误差不超过地物点中误差的1/5; 高程中误差不超过基本等高距的1/10。
¾附录A表格使用方法
• 采用以上参数,根据公式A.1和A.2可分别计算各种基线数条件下 所能达到的平面精度和高程精度。为使用方便,附录A中列出了部 分计算结果,以供参照。
示例1:
基本参数:成1:1000比例尺地形图(丘陵地);采用相机Canon EOS 5D Mark II-24mm; GSD 0.1m;短边平行航向方式航摄;求 平面、高程控制点布设方式?
航空摄影测量外业调绘作业

航空摄影测量外业调绘作业摘要:本文对现行外业调绘生产流程、作业方法、存在的问题进行了分析以及提出了外业调绘作业改进的措施。
关键词:航空摄影测量;外业调绘;方法;措施Abstract: This paperanalyzes andput forwardto surveying and mappingwork improvementmeasureson the existing problemsinsurveying and mappingproduction process, operation method,existence.Keywords:aerial photogrammetry;investigation;method; measures引言:航测外业采用计算机屏幕像对立体采集地物数据, 内业直接对外业矢量数据进行微分纠正, 在计算机“地物自动识别系统”开发成功并真正能在我国实现生产以前, 内业数字摄影测量系统主要完成DEM的生产和对个别坡度过陡的局部地物进行修测, 是我国现阶段国情下, 在国家基础地理信息采集中较恰当的“航测内外业一体化”途径。
1现行外业调绘生产流程分析航测外业调绘是航测工作的一个重要流程,我局经过几年的技术改造,初步形成了内外业一体化成图体系,工作模式为:根据项目要求对航测数字化测图范围进行航空摄影,生成摄影负片。
对负片进行扫描,生成扫描影像TIF文件。
内业扫描完的影像文件由内业作业员进行加密,形成空三加密成果。
内业测图人员根据加密成果构成单个的立体像对进行测图,进行内业预判。
同时制作过渡DOM。
将内业预判的成果与过渡DOM 叠加,打印形成外业调绘用的调绘底图。
作业员持调绘片到实地进行外业调绘,用不同的符号和颜色标注不同类型的地物、居民地名称、植被等。
外业调绘结束后回驻地或单位在计算机上进行调绘成果整理。
再通过打印、自查、修改,直至二查结束,打印形成最终的“调绘片”。
附录C-航空摄影测量
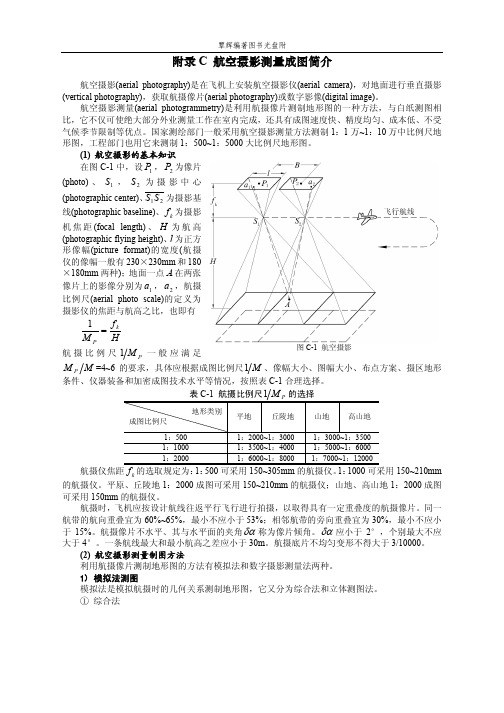
附录C 航空摄影测量成图简介航空摄影(aerial photography)是在飞机上安装航空摄影仪(aerial camera),对地面进行垂直摄影(vertical photography),获取航摄像片(aerial photography)或数字影像(digital image)。
航空摄影测量(aerial photogrammetry)是利用航摄像片测制地形图的一种方法,与白纸测图相比,它不仅可使绝大部分外业测量工作在室内完成,还具有成图速度快、精度均匀、成本低、不受气候季节限制等优点。
国家测绘部门一般采用航空摄影测量方法测制1:1万~1:10万中比例尺地形图,工程部门也用它来测制1:500~1:5000大比例尺地形图。
(1) 航空摄影的基本知识在图C-1中,设1P ,2P 为像片(photo)、1S ,2S 为摄影中心(photographic center)、21S S 为摄影基线(photographic baseline)、k f 为摄影机焦距(focal length)、H 为航高(photographic flying height)、l 为正方形像幅(picture format)的宽度(航摄仪的像幅一般有230×230mm 和180×180mm 两种);地面一点A 在两张像片上的影像分别为1a ,2a ,航摄比例尺(aerial photo scale)的定义为摄影仪的焦距与航高之比,也即有H f M k P =1 航摄比例尺P M 1一般应满足M M P =4~6的要求,具体应根据成图比例尺M 1、像幅大小、图幅大小、布点方案、摄区地形条件、仪器装备和加密成图技术水平等情况,按照表C-1合理选择。
航摄仪焦距k 的选取规定为:1:500可采用150~305mm 的航摄仪。
1:1000可采用150~210mm 的航摄仪。
平原、丘陵地1:2000成图可采用150~210mm 的航摄仪;山地、高山地1:2000成图可采用150mm 的航摄仪。
航空摄影测量模拟法航片外业调绘 PPT
Chengdou Railway Engneer School
王海生
近景摄影测量
在轧钢生产流水线上,为了提高生产效率和产品质量, 在轧钢生产流水线上,为了提高生产效率和产品质量, 安装量测摄影机,实时地量测被加工物体的大小和形 安装量测摄影机, 引导设备对钢坯进行加工和处理。 状,引导设备对钢坯进行加工和处理。像这样在近距 米以内)拍摄目标图像, 离(一般指 100 米以内)拍摄目标图像,经过加工处 确定其大小、形状和几何位置的技术, 理,确定其大小、形状和几何位置的技术,称为近景 摄影测量。 摄影测量。近景摄影测量包括近景摄影和图像处理两 个过程。近景摄影一般使用量测摄影机,它是框标、 个过程。近景摄影一般使用量测摄影机,它是框标、 内方位元素已知并且物镜畸变小的专用仪器, 内方位元素已知并且物镜畸变小的专用仪器,有的还 备有外部定向、同步摄影、连续摄影等设备。 备有外部定向、同步摄影、连续摄影等设备。也可以 使用非量测摄影机,如电影摄影机、高速摄影机、 使用非量测摄影机,如电影摄影机、高速摄影机、全 息摄影机、显微摄影机、数字摄影机、 光摄影机等。 息摄影机、显微摄影机、数字摄影机、 X 光摄影机等。 图像处理同通常的摄影测量类似, 图像处理同通常的摄影测量类似,分为模拟法和解析 可以获得平面图、立体图、断面图、透视图、 法,可以获得平面图、立体图、断面图、透视图、等 值线图以及包括物点坐标在内的多种物理参数。 值线图以及包括物点坐标在内的多种 Engneer School
王海生
平面像片上为什么能够摄取物 体的三维(立体) 体的三维(立体)图像
航空或航天遥感时,使用微波全息雷达、合成 干涉仪雷达或相干激光雷达等,能够获得高分 辨率的三维(立体)图像。三维图像即常说的 全息图像。我们知道,普通的照片是二维的, 它所记录的只是光波的强度分布图像即振幅信 息,而不包括相位信息。既记录振幅又记录相 位的摄影称为“全息”摄影,那么在平面像片 上是怎样反映全息图像的呢?这里的关键是引 入了一束相干的参考光。摄影时,借助参考光 确定两束光波的相位差,把来自物体本身的光 波记录下来,也把反射的人工施加的参考光记 录下来。于是在参考光的“衬托”下获得三维 Chengdou Railway 图像。在一般照明条件下从全息图上看不到物 Engneer School 王海生 体的影像,用一定方向的激光束投射到全息图 上,才能显现物体的影像(实像或虚像)。
航空摄影测量

航空作业名称
01 基本原理
03 相关技术
目录
02 优点 04 测量方法
05 具体工作
07 未来发展
目录
06 我国发展情况
航空摄影测量(aerial photogrammetry)指的是在飞机上用航摄仪器对地面连续摄取像片,结合地面控制 点测量、调绘和立体测绘等步骤,绘制出地形图的作业。
测量方法
20世纪30年代以来,航空摄影测量的测图方法主要有3种,即综合法、全能法和分工法(或称微分法)。
航空摄影测量的综合法是摄影测量和平板仪测量相结合的测图方法。地形图上地物、地貌的平面位置由像片 纠正的方法得出像片图或线划图,地形点高程和等高线则用普通测量方法在野外测定。它适用于平坦地区的大比 例尺测图。
③综合法测图。主要是在单张像片或像片图上用平板仪测绘等高线。
航测内业工作包括:
①测图控制点的加密。以前对于平坦地区一般采用辐射三角测量法,对于丘陵地和山地则采用立体测图仪建 立单航线模拟的空中三角,进行控制点的加密工作。20世纪60年代以来,模拟法空中三角测量逐渐地被解析空中 三角测量代替(见空中三角测量)。
航空摄影测量的全能法是根据摄影过程的几何反转原理,置立体像对于立体测图仪内,建立起所摄地面缩小 的几何模型,借以测绘地形图的方法。在立体测图仪上安置像片时依据内方位元素,目的是使恢复后的投影光束 同摄影光束相似(也可在一定条件下变换投影光束)。由于像对的相对定向过程中并未加入控制点,只利用了像 对内在的几何特性,所以建立的几何模型的方位是任意的,模型的比例尺也是近似值,因此必须通过绝对定向才 能据以测图。
全能法测图的仪器是立体测图仪。
具体工作
航空摄影测量需要进行外业和内业两方面的工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分类的结果
9区分类别 9不能确定类别属性
9阴影: ¾本影:未直射的阴暗部分的影像,有利于判别形状 ¾落影:影子的影像,获得高度感(烟囱、高压线等)
9 图案:形状、大小、阴影、色调形成的影像的组合,例: 森林:颗粒状;河流:带状;耕地:平板状
9 纹理:海滩纹理表示沙的粗细;果园纹理识别果树
计算机自动解译方法: 概率统计法:同类地物应该具有同样的光谱和纹理特征,受 环境因素干扰,表现出一定的离散性,同类地物在某一亮度水
第十章 航空摄ቤተ መጻሕፍቲ ባይዱ测量外业
§10-1 任务及流程
主要任务: 9 野外控制测量 9 判读和调绘: 判读:解译(识别目标) 调绘:按地形图的要求,通过实地调查,将地形地物的名
称、数量、性质、说明注记,准确合理地描绘注记在像 片上 9 野外补测:航摄漏洞、大面积的云影、影像不清晰地区
§10-2 像片控制点的布设
沟渠双线或单线表示,注明流向 9 植被:农田及植被(稻田、菜地、草地)实地调查
监督分类: 已知的样本类别和类别的先验知识
确定判别函数和相应的判别准则
学习和训练:利用已知类别的样本观测值求解待定参数的过程
特征向量X属于哪一类? 将类别之间划上一个合适的边界(将特征空间分割成不同的 判别区域) 特征向量X落入某个区域,地物属于那一类别
像控点的布设原则及要求: 9 影像可以明确辨认的明显目标点(固定的田角、道路交叉口、
建筑物墙角) 9 按航线全区域统一布点 9 距离各类标志(框标、片号)>1mm,距像片边缘>1cm 9 选在旁向重叠中线附近,离开方位线大于3cm,应分别布点
布点方案 ¾航带网法: 9六点法: 普遍采用 9八点法:采用三次多项式进行非线性变形改正
像控点的位置要求: 9航线两端一对像控点设在通过像主点且垂直于方位线上,偏 离不能大于半条基线,最大不超过一条基线 9航线中间一对像控点设在中央。
¾区域网:区域四周布设平高点,中间多加一些高程点 9区域的划分:以面积最大不超过像对数划分,一般不超过6 条航线
9光束法:区域四周,平高和高程点间隔布设 9密周边布点: 48幅图以上 像控点的量测:在像片上的具体位置
准出现的概率密度最大。 语言结构识别: 模糊数学识别法: 像片调绘:在解译的基础上,进行综合取舍,按图示规定的符 号将地物、地貌元素描绘在像片上作注记,进行室内整饰 各要素的调绘要点: 9居民地:独立房屋不综合,特殊用途要说明 9道路:等级分明,取舍得当;公路(均匀的带状),大车路 (宽度不等的浅灰色或白色粗线条) 9 水系(河流、湖泊、水库):类别、等级划分适当,河流、
§10-5 像片解译与调绘
像片解译:识别像片上的各种影像所反映的属性特征 方法: 9 目视解译:在掌握影像特征的基础上,依经验进行判读,
解译类别详细。航摄像片常用方法 9 自动解译:计算机算法和法则支持下,自动实现属性识别
和分类的目的。快速、方便,类别不祥细。遥感影像目视 解译、计算机自动解译相结合 目视解译特征: 9 形状:物体与影像基本相似,但会产生变形(烟囱等) 9 色调:影像颜色深浅程度(与亮度、颜色、含水量、摄影 季节有关)
判别函数:表示和鉴别某特征向量属于哪一类别的函数 9不是集群在特征空间形状的的数学描述 9描述某个未知量属于某个类别的情况,如属于某个类别的条 件概率(如概率判别函数) 判别准则:确定某矢量属于某一类的判断依据 贝叶斯规则:错分概率或风险最小
将未知类别的样本的观测值带入判别函数
依据判别准则判定该样本所属类别