K1.27 连续系统的模拟:并联形式
连续系统模拟
第五章连续系统的计算机模拟技术1 微分方程建模法微分方程建模方法是研究函数变化规律的有力的工具,在科技、工程、经济管理、生态、环境、人口、交通等各个领域中有着广泛的应用。
微分方程模型的建立常常有如下步骤:(1)翻译或转化在实际问题中,有许多表示导数的常用词,如速率、增长率(生物学或人口问题中)、衰变(放射性问题)以及边际(经济)等。
(2)建立瞬间表达式根据自变量有微小改变t∆时因变量的增量w∆,建立起在t∆时段上的增量表达dw的表达式。
式,令0t→∆,即得到dt(3)配备物理单位在建模中应注意每一项采用同样的物理单位。
(4)确定条件这些条件是关于系统在某一特定时期或边界上的信息,他们独立于微分方程而成立,用以确定有关的常数。
为了完整充分的给出问题的数学陈述,应将这些给定的条件和微分方程一起给出。
建立微分方程模型较常用的有两种方法:(1)按变化规律直接列出方程即利用人们熟悉的数学、物理、化学等学科中规律,如牛顿第二定律等,对实际问题直接列出微分方程。
(2)模拟近似法在生物、经济等学科中,许多现象所满足的规律并不很清楚,而且现象也相当复杂,因而需要根据实际资料或大量的实验数据,提出各种假设,在一定条件下,给出实际现象所满足的规律,然后利用适当的数学方法得出微分方程。
建立微分方程模型只是解决问题的第一步,通常需要求出方程的解来说明实际现象,并加以检验。
如果能得到解析形式的解固然是便于分析和应用的,但大多数微分方程是求不出其解析解的,因此研究其稳定性和数值解法也是十分重要的手段。
1新产品销售的Malthus模型新产品销售的Malthus模型著名的英国统计学家托马斯•马尔萨斯(Thomas Malthus)在1798年提出了商品广告模型一个新产品要在市场打开销路,产品质量固然重要,广告宣传也是不可忽视的,随着社会向现代化的发展,商品广告对企业生产所起的作用越来越重要了,它是商品促销的强有力手段,然而,广告与销售之间的关系如何?如何评价不同时期的广告效果?这个问题对于生产企业,对于那些为推销商品做广告的企业更为重要。
第2章 连续系统的数学模型

第 2 章 连续系统的数学模型 13
自动控制原理
列写系统微分方程的一般步骤:
(1)确定系统的输入、输出变量; (2)从输入端开始,按照信号的传递顺序,依据各变量 所遵循的物理、化学等定律,列写各变量之间的动态方程, 一般为微分方程组; (3)消去中间变量,得到输入、输出变量的微分方程; (4)标准化:将与输入有关的各项放在等号右边,与输 出有关的各项放在等号左边,并且分别按降幂排列,最后将 系数归化为反映系统动态特性的参数,如时间常数等。
例2:列写如图所示RC网络的微分方程。给定输入电压 ur(t)为系统的输入量,电容上的电压uc(t)为系统的输出量。
R1 ur(t)
C1 R2 C2 uc(t)
设R1上的电流为i1,R2的电流为i2,C1上的电压为uc1 , 由基尔霍夫电压定律,列写回路方程:
i1R1 uc1 ur
i 2R2 uc uc1
因为该建模方法只依赖于系统的输入输出关系,即使对 系统内部机理不了解,也可以建立模型,所以常称为“黑箱” 建模方法。 由于系统辨识是基于建模对象的实验数据或者正常运行 数据,所以,建模对象必须已经存在,并能够进行实验。而 且,辨识得到的模型只反映系统输入输出的特性,不能反映 系统的内在信息,难以描述系统的本质。
第 2 章 连续系统的数学模型 4
自动控制原理
2.输入输出描述模型与内部描述模型
描述系统输出与输入之间关系的数学模型称为输入输出 描述模型,如微分方程、传递函数、频率特性等数学模型。
状态空间模型描述了系统内部状态和系统输入、输出之 间的关系,所以称为内部描述模型。
内部描述模型不仅描述了系统输入输出之间的关系,而 且描述了系统内部信息传递关系,所以比输入输出模型更深 入地揭示了系统的动态特性。
连续系统常用的数学模型及其转换
(4) 命令历史窗口“Command History”
[例2] 已知系统传递函数为
G( s)
7(2s 3) s 3 (3s 1)(s 2) 2 (5s 3 3s 8)
利用MATLAB将上述模型表示出来。 解:其MATLAN命令为: num=7*[2,3]; den=conv(conv(conv([1,0,0],[3,1]),conv([1,2],[1,2]),[5,0,3,8]); sys=tf(num,den) 运行结果: Transfer function: 14 s + 21 15 s^8 + 65 s^7 + 89 s^6 + 83 s^5 + 152 s^4 + 140 s^3 + 32 s^2
解:>> A=[0,1,0;0,0,1;2,3,0]; >> B=[0;0;1]; >> C=[1,0,0]; >> D=0; >> sys=ss(A,B,C,D,1); >> [G1,T]=canon(sys,'modal')
控制系统建模的基本方法
1. 解析法建立数学模型
如:《现代控制理论》
[例] 试列写如图所示RLC的电路方程,建立系统的状态空间表达 式。
x ˆ 1 1 1 0 x ˆ 1 0.1111 x 0.3333 u ˆ ˆ x 0 1 0 2 2 x ˆ ˆ 3 0 0 2 x 3 0.1111ቤተ መጻሕፍቲ ባይዱ
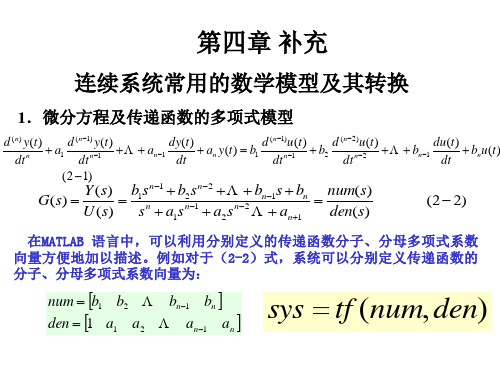
Y (s) b1s n1 b2 s n2 bn1s bn num(s) G( s ) n n 1 n2 U ( s) s a1s a2 s an1 den(s)
连续系统的数字仿真.
第四章 连续系统的数字仿真连续系统是最常见的系统,它的仿真方法是系统仿真技术中最基本、最常用和最成熟的。
进行数字仿真首先要建立被仿真系统的数学模型,并将此模型转换成计算机可接受的、与原模型等价的仿真模型,然后编制仿真程序,使模型在计算机上运转。
如何将连续系统的数学模型转换成计算机可接受的等价仿真模型,采用何种方法在计算机上解此模型,这是连续系统数字仿真算法要解决的问题。
本章介绍了连续系统数字仿真常用的数值积分法和离散相似法。
4.1 连续系统仿真的数值积分法4.1.1 数值积分法原理考察一阶微分方程,形如0)( , ))(,()(y t y b t a t y t f t y =≤≤= (4.1) 设式(4.1)的解)(t y 在区间],[b a 上是连续变化的。
我们将区间],[b a 分成若干个小区间,时间间隔为h ,在一个区间],[1+=k k t t t 内积分,则有⎰++=+11),(k k t t k k dt y t f y y (4.2)在],[b a t ∈,对应于每个离散时间点k ,均可求出对应的k y ,并将这些离散的),2 ,1( =k y k 作为解)(t y 的在离散点上的近似值,如图4.1所示。
式(4.2)中的积分项很难求得。
但由于泰勒公式,存在,2 ,1 ,0 ! 31! 21321=+'''+''+'+=+k h y h y h y y y k k k k k(4.3) 式中,h 为积分步长。
图4.1 数值积分计算示意图这是一个递推公式,借助计算机按一定算法可以依次求出 ,,21y y 各点的值。
当h 足够时,这些点的y 值可作为方程(4.1)的近似解,由式(4.2)我们可以引出多种数值积分方法。
以下介绍几种常用的数值积分法。
1.欧拉(Euler )法已知一阶微分方程⎪⎩⎪⎨⎧==00)(),(y t y y t f dt dy (4.4) 式(4.3)右边取两项,则hy t f y y hy t f y y h y t f y h y y y k k k k y y t t ),( ),(),(111120000100+=+=+=+=+==(4.5)很明显,由上式可以求出各点的k y 值。
连续系统的表示和模拟共33页
END
16、业余生活要有意义,不要越轨。——华盛顿 17、一个人即使已登上顶峰,也仍要自强不息。——罗素·贝克 18、最大的挑战和突破在于用人,而用人最大的突破在于信任人。——马云 19、自己活着,就是为了使别人过得更美好。——雷锋 20、要掌握书,莫被书掌握;要为生而读,莫为读而生。——布尔沃
连续系统的表示和模拟
16、自己选择的路、跪着也要把它走 完。 17、一般情况下)不想三年以后的事, 只想现 在的事 。现在 有成就 ,以后 才能更明。 19、学习的关键--重复。
20、懦弱的人只会裹足不前,莽撞的 人只能 引为烧 身,只 有真正 勇敢的 人才能 所向披 靡。
第4章 连续系统模拟PPT课件

精选PPT课件
3
4.1 引言
连续系统模拟的基本步骤:
(1) 首先将连续系统的动态特性用微分方程 、状态方程或传递函数等形式来描述;
(2) 然后将将数学模型转换成能被数字计算 机接受的离散化模型;
(3) 最后是模型续系统模拟的实现工具:
(1) Matlab (2) Vensim (3) Powersim (4) Anylogic (5) Ithink (6) Stella
精选PPT课件
6
4.2 连续系统数学模型的求解
连续系统数学模型求解举例
例:钢锭在均热炉中达到2000oF的温度,取出冷却至70oF。在 此情况下,状态变量为钢锭的温度,以T表示。
解:根据牛顿热力学定律,物体冷却的速度与外界媒介和物体 本身的温度差成正比,因此,钢锭温度的变化率与温度(T- 70)成正比。由于钢锭的温度是下降的,记比例常数为-K,可 列出微分方程为
近似值。
精选PPT课件
20
4.2 连续系统数学模型的求解
同样,若在(4.6)式中进行泰勒级数得展开时,保留到h4项,截断误 差为O(h5)时,就可以得到四阶的龙格—库塔公式 yn1 yn h2(K1K2)
yn 1yn6 h(K 12K 22K 3K 4)
四阶龙格—库塔公式取了4个点,只是第2点和第3点重合在一点 tn+k/2上。
基模结构图411滞延的调节环路基模结构实际状况调整行动基模结构图413成长上限基模结构促进成长的要素抑制成长的要素限制因素的情况成长的情况基模结构图415舍本逐末基模结构症状解副作用根本解问题症状基模结构图417目标侵蚀基模结构目标降低目标实际状况改善状况的活动偏差基模结构图419恶性竞争基模结构甲的成果甲的活动乙对甲的威胁甲对乙的威胁乙的活动乙的成果基模结构图421甲的表现乙的表现给甲的资源给乙的资源分配给甲相对于给乙基模结构图423共同悲剧基模结构甲的活动全部的活动乙的活动乙的净收益资源的极限个别活动所得到得资源甲的净收益基模结构图425饮鸩止渴基模结构问题对策后遗症基模结构图427成长与投资不足基模结构成长的行动需求绩效产能认知的投资需求产能的投资绩效的标准44vensimple本节讨论利用系统动力学对新产品的市场传播动力学进行建模
连续系统仿真的方法.

第3章 连续系统仿真的方法3.1 数值积分法连续系统数值积分法,就是利用数值积分方法对广微分方程建立离散化形式的数学模型——差分方程,并求其数值解。
可以想象在数学计算机上构造若干个数字积分器,利用这些数字积分器进行积分运算。
在数字计算机上构造数字积分器的方法就是数值积分法,因而数字机的硬件特点决定了这种积分运算必须是离散和串行的。
把被仿真系统表示成一阶微分方程组或状态方程的形式。
一阶向量微分方程及初值为()(),00t Y Y t Y ⎧⎫⎪⎪⎨⎬⎪⎪⎩⎭Y =F =(3-1)其中,Y 为n 维状态向量,F (t ,Y )为n 维向量函数。
设方程(3-1)在011,,,,n n t t t t t +=…处的形式上的连续解为()()()()n+1n+1t t n+10t t t =Y t +,(),n Y F t Y dt Y t F t Y dt=+⎰⎰(3-2)设 n =()n Y Y t ,令1n n n Y Y Q +=+(3-3)则有:()1n+1t n Y Y +=也就是说,1(,)n nt n t Q F t Y dt +≈⎰(3-4)如果n Y 准确解()n Y t 为近似值,n Q 是准确积分值的近似值,则式(3-4)就是式(3-2)的近似公式。
换句话说,连续系统的数值解就转化为相邻两个时间点上的数值积分问题。
因此,所谓数值解法,就是寻求初值问题(3-1)的真解在一系列离散点12n t t t <…<…上的近似解12,,,n Y Y Y ……,相邻两个时间离散点的间隔1n n n t t +=-h ,称为计算步距或步长,通常取n =h h 为定值。
可见,数值积分法的主要问题归结为对函数(,)F t y 的数值积分问题,即如何求出该函数定积分的近似解。
为此,首先要把连续变量问题用数值积分方法转化成离散的差分方程的初值问题,然后根据已知的初值条件0y ,逐步地递推计算后续时刻的数值解(1,2,)i y i =…。
过程系统模拟的联立模块法

S 7 A73S 3 S 5 A53S 3
②从严格模块计算简化模型的系数 式中的系数矩阵可通过对严格模块的 扰动计算得到。前面我们假定A=G(x) ,也就得到了A。而A是从一阶Taylor展 开式得到的。偏离x0点后便会产生偏差 ,因此要不断进行修正。
混合器:S 2 A25S 5 A26S 6 A21S1
闪蒸器1: S 3 A32 S 2 S 4 A42 S 2
闪蒸器2:
闪蒸器3:
S 7 A73S 3 S 6 A64 S 4 S 5 A53S 3 S 8 A84 S 4
由于混合器的严格模型为线性模型,且 系统入料流股变量为给定值,所以有:
联立模块法利用严格模 块产生相应的简化模型 方程的系数,然后把所 有的简化模型方程汇集 到一起进行联解,得到 系统的一组状态变量。 由于简化模型是严格模 块的近似,所以计算结 果往往不是问题的解, 必须用严格模块对这组 解进行计算,修正简化 模型的系数。重复这一 过程,直到收敛到原问 题的解。
联立模块法的特点: ①把序贯模块法中最费时、收敛最慢的回路 迭代计算,用由简化模型组成的方程组的 联解而代之,从而使计算加速。尤其是处 理有多重再循环流或有设计规定要求的问 题时,具有较好的收敛行为。因此,联立 模块法计算效率较高。 ②简化模型方程组的维数比面向方程法也小 得多,求解起来也容易。 ③能利用大量原有的丰富的序贯模块软件。
A25 A26 A21 I S1 0 S 2 IS 5 IS 6
把上述线性简化模型写成矩阵形式的迭代格式, 则有:
I3 A84 A25 A26 A21 I
S1 0 S 2 IS 5 IS 6
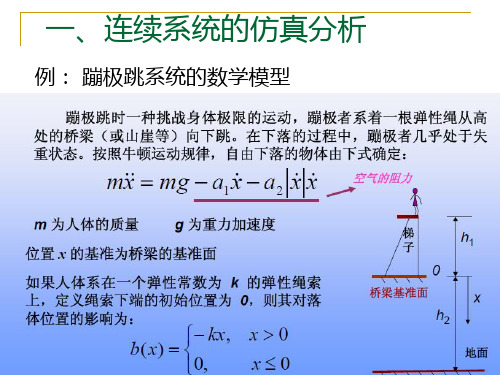
一、连续系统的仿真分析 例: 蹦极跳系统的数学模型
单位延迟模块的参数设置
三、 线性系统仿真分析
例 :线性离散系统仿真分析 1. 数字滤波器的数学描述 2. 低通数字滤波器的差分方程描述:
y(n) 1.6 y(n 1) 0.7 y(n 2) 0.04u(n) 0.08u(n 1) 0.04u(n 2)
系统的Z变换 Y ( z ) 0.04 0.08z 1 0.04z 2 U ( z) 1 1.6 z 1 0.7 z 2
y(n) 1.6 y(n 1) 0.7 y(n 2) 0.04u(n) 0.08u(n 1) 0.04u(n 2)
此数字滤波器为线性离散系统,使用滤波器形式对其进 行描述如下:
Y ( z ) 0.04 0.08z 1 0.04z 2 U ( z) 1 1.6 z 1 0.7 z 2
通信系统输出信号 原始锯齿波信号
延迟与失真
图5.40 通信系统输出与原始锯齿波信号比较
混合系统设计之二:行驶控制系统 汽车行驶控制系统是应用非常广泛的控制系统之一, 其主要目的是对汽车速度进行合理的控制。系统的工 作原理如下: (1)汽车速度操纵机构的位置发生改变以设置汽车 的速度,这是因为操纵机构的不同位置对应着不同的 速度。 (2)测量汽车的当前速度,并求取它与指定速度的 差值。 (3)由速度差值信号驱动汽车产生相应的牵引力,并 由此牵引力改变汽车的速度直到其速度稳定在指定的 速度为止。 由系统的工作原理来看,汽车行驶控制系统为典型 的反馈控制系统。下面建立此系统的 Simulink 模型并 进行仿真分析。
一、连续系统的仿真分析
例: 蹦极跳系统的数学模型
二、离散系统的仿真分析
例: 人口变化系统的数学模型 这是一个简单的人口变化模型。在此模型中,设某一年的人口数 目为p,其中表示年份n,它与上一年的人口、人口繁殖速率以及新 增资源所能满足的个体数目之间的动力学方程由如下的差分方程所描 述:
连续系统与离散事件系统仿真
一、连续系统模型与离散系统模型
z 连续系统——系统状态变化在时间上是连 续的,可以用方程式(常微分方程、偏微 分方程、差分方程)描述系统模型。
z 离散系统——系统的状态只是在离散时间 点上发生变化,而这些离散时间点一般是 不确定的。
二、连续系统模型描述
连续系统仿真中的数学模型有三类:
1)连续时间模型: 通常可用以下几种方式表示:常微分方 程、传递函数、权函数和状态空间描述。
快速性:仿真速度
每一步计算所需要的时间决定了仿真速度。
若第k步计算对应的系统时间间隔为hk,计算 机由y(tk)计算y(tk+1)需要的时间为Tk, 则
Tk = hk为实时仿真, Tk < hk 为超实时仿真, Tk >hk为离线仿真。
z 连续系统数字仿真的离散化方法有两类
数值积分方法:微分方程已知初值求解 离散相似方法:求连续系统的等价离散模型
理想的信号重构器
要完全恢复连续信号,理想信号重构器频 率特性如图:
T -ωs/2 0 ωs/2 ω 实际的信号重构器:零阶(一阶)信号重构器
第二章 离散事件系统仿真
1.2.1 离散事件系统仿真概述
一、离散事件系统 系统中的状态只是在离散时间点上发生变
化,而且这些离散时间点一般是不确定 的。
如理发馆系统、订票系统、库存系统、交通 控制系统等。
5
离散事件系统示例
例 单人理发馆系统, 设上午9:00开 门, 下午5:00关门
z 顾客到达时间一般是随机的, 为每个顾 客服务的时间长度也是随机的。
z 系统的状态:服务台的状态(忙或闲)、 顾客排队等待的队长。
z 状态量的变化也只能在离散的随机时间 点上发生。
连续系统的模拟

第四节 连续系统的模拟
系统模拟是在整个运行过程中对系统的仿真,是非常有效的和广泛使用的分析、研究复杂系统的技术.在一定假设条件下,利用数学运算模拟系统的运行,称为数学模拟.现代的数学模拟都是在计算机上进行的,因此也称为计算机模拟,简称模拟(simulation)
模拟分为静态模拟(static simulation)和动态模拟(dynamic simulation).数值积分中的蒙特卡洛方法是典型的静态模拟.动态模拟又分为连续系统模拟和离散系统模拟.
状态随着时间连续变化的系统,称为连续系统(continuous system).对连续系统的计算机模拟是近似地获取系统状态在一些离散时刻点上的数值.在一定假设条件下,利用数学运算模拟系统的运行过程.连续系统模型一般是微分方程,它在数值模拟中最基本的算法是数值积分算法.例如有一系统可用微分方程来描述
),(y t f dt
dy =已知输出量y 的初始条件,现在要求出输出量y 随时间变化的过程。
最直观的想法是:首先将时间离散化,令00)(y t y =)(t y k k k t t h −=+1,称为第k 步的计算步距(一般是等间距的),然后按以下算法计算状态变量在各时刻上的近似值
)(t y 1+k t ),)(,()(111k k k k k k k t t y t f y y t y −+=≈+++ 其中初始点按照这种作法即可求出整个的曲线.这种最简单的数值积分算法称为欧拉法.除此之外,还有其他一些算法.
",2,1),,(00=k y t )(t y 因此,连续系统模拟方法是:首先确定系统的连续状态变量,然后将它在时间上进行离散化处理,并由此模拟系统的运行状态.。
连续系统的微分方程及其算子表示

yh (t) A1e1t A2e2t ... Anent Aieit i 1
(2)特征根有重根 。
若1是特征方程的 k 重根,即有1 2 3 ... k ,而其
余 n k 个根都是单根,则微分方程的齐次解中相应 于的部分有项,即
k
( A1t k1 A2t k2 A3t k3 ... Ak )e1t Ait kie1t
进行公因子相消。 (2)算子的乘除顺序不能随意颠倒,即
这表明“先乘后除”的算子运算(即先微分后积 分) 不能相消;而“先除后乘”(先积分后 微分) 的算子运算可以相消。
例:设某连续系统的算子为 试写出此系统的输入输出微分方程。
解:令系统的输入为 ,输出为 ,由给 定传输算子 写出此系统算子方程为
即 与 之间的关系为 所以系统的输入输出微分方程为
可根据自由项的函数形式来选择,如下表所示。
f (t)
例2.1.3 已知微分方程
求下列两种情况下微分方程的特解
解:(1)因为
,将 f (t) 代入方程,得方程
右边的自由项为 t2 2t
查表2.1可知,特解的一般形式为
所以
dy p dt
2 At B, dd2ty2p
2A
代入原方程得 由对应项系数相等得 所以方程的特解为 (2)因为,所以方程右边的自由项为 查上表可知,特解的一般形式为
2.特 解 根据微分方程右端函数式形式,设含待定系数的 特数的特解函数式→代入原方程,比较系数定出 特解。
3.全 解 齐次解+特解,由初始条件定出齐次解系数 Ak 。
1.齐次解
由特征方程→求出特征根→写出齐次解形式
齐次解是满足式上式中右端激励及其各阶导数 都为零的齐次微分方程的解。即:
使用KVL学习范例RLC电路并联的数学模型RLC电路串联的数学模型

暫態
從實際的觀點來看,當暫態可以忽略時 ,電容被充電
電路含有一個儲能元件 微分方程式法
條件
1. 電路只有獨立恆定電源 2. 對於關注的變數可以容易得到微分方程式。通常,使用基本的分析工具,如 KCL、 KVL. . .或戴維寧等效定律
3. 微分方程式的初始條件是已知的或者可以利用穩態分析得到
FACT: WHEN ALL INDEPENDENT SOURCES ARE CONSTANT FOR ANY VARIABLE, y( t ), IN THE CIRCUIT THE SOLUTION IS OF THE FORM y( t ) K 1 K 2 e
步驟 1 時間常數 dy y f dt dv RC (t ) v (t ) Vs dt
從微分項的係數得到時間常數
K1 VS
假如數學模型為 dy y f 則 K1 f dt
步驟 3 使用初始條件
當t 0 v(0) K1 K 2 K 2 v(0) K1
KVL
KVL VTH VOC 2 I1 4 4[V ]
b
必需找出 iL (t )
使用戴維寧定律時,假設電感在穩 態狀況下
vO (t ) K1 K 2e
t
4 i L (0) i (0) [ A] 3 4 8 i (0) vO (0) [V ] 3 3 8 10 K1 K 2 6 K 2 K 2 3 3
暫態
e e
t t 0
在電路上的任意變數具有如下的型式
x(t ) e
x(t0 )
fTH
e
t t
连续系统的数学模型

t
s 0
16
• 初值定理 • 微分定理
• 积分定理
lim f (t) lim sF (s)
t 0
s
L[ df (t)] sF (s) f (0)
dt
d2 L[
f
(t ) ]
s2F(s)
sf
(0)
f
' (0)
dt 2
L[ f (t)dt] F (s) f 1(0)
s
s
L[
第2章 连续控制系统的数学模型
2.1 系统数学模型的概念 2.2 微分方程描述 2.3 传递函数 2.4 结构图 2.5 信号流图 2.6 系统数学模型的MATLAB表示
1
2.1 系统数学模型的概念
数学模型: 描述系统内部各物理量(或变量)之间关系的数学 表达式或图形表达式或数字表达式。
Why? 精确控制性能指标需要数学模型。 完全不同物理性质的系统,其数学模型具有相似性!
6
根据机理分析,列些微分方程的步骤: ⑴确定系统的输入量和输出量。 ⑵对系统中每一个元件列写出与其输入、输出量有关的物理 方程。 ⑶对上述方程进行适当的简化,比如略去一些对系统影响小 的次要因素,对非线性元部件进行线性化等。 ⑷从系统的输入端开始,按照信号的传递顺序,在所有元部 件的方程中消去中间变量,最后得到描述系统输入和输出关 系的微分方程。
2.1 控制系统数学模型的概念 2.2 微分方程描述 2.3 传递函数 2.4 传递函数模型 2.5 结构框图模型 2.6 频率特性模型
15
预备知识-拉普拉斯变换与反变换
⑴ 拉氏变换定义
设函数f(t)满足 ①t<0时 f(t)=0
② t>0时,f(t)分段连续