工业工程之双手法
基础工业工程实验报告_双手操作与mod法

基础工业工程实验报告_双手操作与mod法一、实验目的和要求1、掌握工艺程序图的绘制方法2、掌握工艺程序图分析方法3、试用“5WIH”提高技术发掘问题,并用“ECRS”原则来改进装配流程。
二、实验内容1、熟悉CJ-IO 型交流接触器的构成及各组成零件的名称。
2、了解CJ-IO 型交流接触器的结构原理: CJ-IO 型交流接触器的结构与一般电磁式电器相同,也由电磁机构、触点系统、尖弧系统、复位弹簧机构或缓冲装置、支架与底座等几部分构成。
接触器的工作原理是:当吸引线圈通电后,线圈中的电流在铁心中产生磁通对街铁产生克服复位弹簧反力的电磁吸力,铁带动触点动作。
当线圈中的电使街压值降低到某一数值时,铁心中的磁通下降,电磁吸力减小,当减小到不足以克服复位弹簧的反力时,街铁在复位弹簧的反力作用下复位。
-IO 型交流接触器的装配工艺程序。
3、3、设计CJ4、绘制出所设计的CJ-IO 型交流接触器的工艺程序图。
5、按所操作设计的工艺程序图对CJ-IO 型交流接触器进行实际组装。
6、在实施了实际组装操作的基础上,对所设计的工艺程序图进行分析。
三、实验报告(1) 双手操作图(2) 动素分析表(双手动素图)安装橡皮脚左手动素右手分析要点伸手至橡皮脚 1 伸手至小螺钉拿起橡皮脚 2 拿起小螺钉3 移动底座工作位置移动底座工作位置, 4 , 将橡皮脚套入小将橡皮脚套入小螺钉螺钉待持住 5 将组装好的橡皮脚插入孔中伸手至小螺帽 6 伸手至改刀拿起小螺帽 7 拿起改刀8 移至底座工作位移至底座工作位置置9 旋转小螺帽用改刀抵住螺钉等待 10 放下改刀伸手至橡皮脚 11 伸手至小螺钉拿起橡皮脚 12 拿起小螺钉13 移动底座工作位置移动底座工作位置, 14 , 将橡皮脚套入小将橡皮脚套入小螺钉螺钉待持住 15 将组装好的橡皮脚插入孔中伸手至小螺帽 16 伸手至改刀拿起小螺帽 17 拿起改刀18 移至底座工作位移至底座工作位置置19 旋转小螺帽用改刀抵住螺钉等待 20 放下刀21 将底座水平旋转将底座水平旋转180 180 伸手至橡皮脚 22 伸手至小螺钉拿起橡皮脚 23 拿起小螺钉24 移动底座工作位置移动底座工作位置, 25 , 将橡皮脚套入小将橡皮脚套入小螺钉螺钉待持住 26 将组装好的橡皮脚插入孔中伸手至小螺帽 27 伸手至改刀拿起小螺帽 28 拿起改刀29 移至底座工作位移至底座工作位置置30 旋转小螺帽用改刀抵住螺钉等待 31 放下改刀伸手至橡皮脚 32 伸手至小螺钉拿起橡皮脚 33 拿起小螺钉34 移动底座工作位置移动底座工作位置, 35 , 将橡皮脚套入小将橡皮脚套入小螺钉螺钉待持住 36 将组装好的橡皮脚插入孔中伸手至小螺帽 37 伸手至改刀拿起小螺帽 38 拿起改刀39 移至底座工作位移至底座工作位置置40 旋转小螺帽用改刀抵住螺钉等待 41 放下改刀安装按钮开关左手动素右手分析要点至按钮帽 1 至按钮柱拿起 2 拿起至工作位置 3 至工作位置对准按钮柱 4 , 将按钮柱插入底座孔内旋转按钮帽 5 紧握按钮柱伸手至按钮片 6 紧握按钮柱拿按钮片 7 紧握按钮柱移动到工作位置 8 紧握按钮柱9 紧握按钮柱将红色按钮片按入按钮中至按钮帽 10 至按钮柱拿起 11 拿起至工作位置 12 至工作位置对准按钮柱 13 , 将按钮柱插入底座孔内旋转按钮帽 14 紧握按钮柱安装交流接触器左手动素右手分析要点伸手至交流器 1 伸手至螺钉拿交流接触器 2 拿起螺钉移动至底板上 3 移动至接触器将孔与孔对准 4 与孔对准持住 5 , 插入孔中伸手至螺帽 6 持住拿起螺帽 7 持住移动至工作位置 8 持住旋转螺帽 9 持住伸手至螺帽 10 伸手至螺钉拿起螺帽 11 拿起螺钉移动至工作位置 12 移动至工作位置对准螺钉 13 , 插入孔内旋转螺帽 14 持住水平旋转180 15 水平旋转180 伸手至螺帽 16 伸手至螺钉拿起螺帽 17 拿起螺钉移动至工作位置 18 移动至工作位置对准螺钉 19 , 插入孔内旋转螺帽 20 持住伸手至螺帽 21 伸手至螺钉拿起螺帽 22 拿起螺钉移动至工作位置 23 移动至工作位置对准螺钉 24 , 插入孔内旋转螺帽 25 持住安装接线端子左手动素右手分析要点1 将底座翻转90 将底座翻转90伸手至一接线端子1# 2 伸手至改刀拿起接线端子 3 拿起改刀移动至开关螺钉处 4 移动至螺钉卡入按钮螺钉 5 持住持住接线端子 6 旋转改刀持住 7 将改刀放下8 将底座翻转90 将底座翻转90 移动到接线端子另一 9 伸手至改刀头拿起接线端子 10 拿起改刀移动至开关螺钉处移动至螺钉11卡入按钮螺钉 12 持住持住接线端子 13 旋转改刀持住 14 将改刀放下15 将底座翻转90 将底座翻转90 伸手至一接线端子2# 16 伸手至改刀拿起接线端子 17 拿起改刀移动至开关螺钉处 18 移动至螺钉卡入按钮螺钉 19 持住持住接线端子 20 旋转改刀持住 21 将改刀放下22 将底座翻转90 将底座翻转90 移动到接线端子另一 23 伸手至改刀头拿起接线端子 24 拿起改刀移动至开关螺钉处 25 移动至螺钉卡入按钮螺钉 26 持住持住接线端子 27 旋转改刀持住 28 将改刀放下(3) MOD表达式及时间计算伸手握取M3G3 M3G3 6 M3G1 伸手拿取改小螺帽刀移至底座M3P0 M3P0 3M3PO 移至底座工工作位置作位置旋转小螺(M1G0M1PM1G0M1P20 M3G1 用改刀抵住帽 0)x10 0 螺钉伸手握取M3G0 M3G3 6 M3G3 伸手握取小橡皮脚螺钉移至底座M3P0 M3P0 3 M3PO 移至底座工工作位置作位置将橡皮脚M2P2 M2P2 4 M2P2 将小螺钉套套入小螺入橡皮脚钉持住 H M2P5 7 M2P5 将组装好的橡皮脚插入孔中伸手握取M3G3 M3G3 6 M3G1 伸手拿取改小螺帽刀移至底座M3P0 M3P0 3 M3PO 移至底座工工作位置作位置旋转小螺(M1G0M1PM1G0M1P20 M3G1 用改刀抵住帽 0)X10 0 螺钉将底座翻(M3G0M3CM3G0M3C8 (M3G0M3C将底座水平转旋转180 2) 2 2) 旋转180 伸手握取M3G1 M3G1 4 M3G1 伸手握取按按钮帽钮柱移至底座M3P0 M3P0 3 M3P0 移至底座工工作位置作位置持住 H M3P2 5 M3P2 将按钮柱插入底座孔内旋转按钮(M2GOM2M2GOM2P32 H 持住帽 P0)X8 0移动握取M3G1 M3G1 4 H 持住按钮按片移至工作M3P0 M3P0 3 H 持住位置将红色按M2P2 M2P2 4 H 持住钮片按入按钮中伸手握取M3G1 M3G1 4 M3G1 伸手握取按按钮帽钮柱移至底座M3P0 M3P0 3 M3P0 移至底座工工作位置作位置持住 H M3P2 5 M3P2 将按钮柱插入底座孔内旋转按钮(M2GOM2M2GOM2P32 H 持住帽 P0)X8 0伸手握取M3G1 M3G3 6 M3G3 伸手握取大交流接受螺钉器移至底座M3P0 M3P0 3 M3P0 移至底座工工作位置作位置将交流接M2P5M2P5 7 H 持住受器对准底座孔持住 H M2P2 4 M2P2 将大螺钉插入孔中伸手握取M3G3 M3G3 6 H 持住大螺帽移至底座M3P0 M3P0 3 H 持住工作位置将大螺帽M3P5 M3P5 8 H 持住对准插入大螺钉旋转按钮(M1GOM1M1GOM1P20 H 持住帽 P0)X10 0伸手握取M3G3 M3G3M2G11 M3G3 伸手握取大大螺帽 3 螺钉移至底座M3P0M3P0 3 M3P0 移至底座工工作位置作位置将大螺帽M2P5 M2P5M2P5 14 M2P5 将大螺钉插对准插入入孔中大螺钉旋转按钮(M1GOM1M1GOM1P20 H 持住帽 P0)X10 0水平旋转(M2G0M2CM2G0M2C6 水平旋转(M2G0M2C180 2) 2 180 2) 伸手握取M3G3 M3G3M2G11 M3G3 伸手握取大大螺帽 3 螺钉移至底座M3P0 M3P0 3 M3P0 移至底座工工作位置作位置将大螺帽M2P5 M2P5M2P5 14 M2P5 将大螺钉插对准插入入孔中大螺钉旋转按钮(M1GOM1M1GOM1P20 H 持住帽 P0)X10 0伸手握取M3G3 M3G3M2G11 M3G3 伸手握取大大螺帽 3 螺钉移至底座M3P0 M3P0 3 M3P0 移至底座工工作位置作位置将大螺帽M2P5 M2P5M2P5 14 M2P5 将大螺钉插对准插入入孔中大螺钉旋转按钮(M1GOM1M1GOM1P20 H 持住帽 P0)X10 0将底座翻(M3G0M3CM3G0M3C7 (M3G0M3C将底座翻转转90 1) 1 1) 90 伸手握取M3G3 M3G3 6 M3G1 伸手握取改接线端子刀一头移动至开M3P0 M3P0 3 M3P0 移动至开关关螺钉处螺钉处将接线端子持住M2P2 M2P2 4 H卡入按钮螺钉持住旋转改刀 H M2G0M2P0 40 (M2G0M2P0)X10持住将改刀放下 H M2P0 2 M2P0将底座翻转(M3G0M3CM3G0M3C7 (M3G0M3C将底座翻转90 1) 1 1) 90 伸手握取M3G3 M3G3 6 M3G1 伸手握取改接线端子刀移动至交M3P0 M3P0 3 M3P0 移动至交流流接收器接收器将接线端子持住 M2P2 M2P2 4 H卡入交流接收器的上螺钉持住旋转改刀 H M2G0M2P0 40 (M2G0M2P0)X10持住将改刀放下 H M2P0 2 M2P0将底座翻(M3G0M3CM3G0M3C7 (M3G0M3C将底座翻转转90 1) 1 1) 90 伸手握取M3G3 M3G3 6 M3G1 伸手握取改接线端子刀移动至开M3P0 M3P0 3 M3P0 移动至开关关螺钉处螺钉处将接线端子持住 M2P2 M2P2 4 H卡入按钮螺钉持住旋转改刀 H M2G0M2P0 40 (M2G0M2P0)X10持住将改刀放下 H M2P0 2 M2P0将底座翻转(M3G0M3CM3G0M3C7 (M3G0M3C将底座翻转90 1) 1 1) 90 伸手握取M3G3 M3G3 6 M3G1 伸手握取改接线端子刀移动至交M3P0 M3P0 3 M3P0 移动至交流流接收器接收器将接线端子持住 M2P2 M2P2 4 H卡入交流接收器的上螺钉持住旋转改刀 H M2G0M2P0 40 (M2G0M2P0)X10持住将改刀放下 H M2P0 2 M2P0总计MOD值=767=767x0.129=98.943s=1min39s 秒表计时为149.47s=2min30s MOD值小于秒表计时因为MOD法计算只要基于一下假设:1,所有人力操作时的动作均为基本动作。
工业工程的七大手法
七大手法之三 — 流程法
15
现场作业改善方法
对象 设备布置
制程改善
着眼点
具体手法手段
适. ✓ 原则11: 工作抬椅高度适当舒适 ✓ 原则12: 尽量以足踏/夹具替代手之工作. ✓ 原则13: 尽可能将二种工具合并.
七大手法之二 —动改法
✓ 原则15: 依手指负荷能力分配工作.
手别 手指別 能力顺序
左手
右手
小无中食食中无小
87531246
✓ 原则16: 手柄接触面尽可能加大 ✓ 原则17: 操作杆应尽可能少变更姿势.
七大手法有哪些?
1.防错法 如何避免做错事情,使工作第一次就做好的,精神能够具 体实现. 2.动改法 改善人体动作的方式,减少疲劳使工作更为舒适、更有 效率,不要蛮干. 3.流程法 研究探讨牵涉到几个不同工作站或地点之流动关系,藉 以发掘出可资改善的地方.
4.五五法 借着质问的技巧来发掘出改善的构想. 5.人机法 研究探讨操作人员与机器工作的过程,藉以发 掘出可资改善的地方. 6.双手法 研究人体双手在工作时的过程,藉以发掘出可 资改善之地方. 7.抽查法 借着抽样观察的方法能很迅速有效地了解问 题的真象.
✓ 5>. 顺序原理: 避免工作之顺序或流程前后倒置,可依编号 顺序排列,可以减少或避免错误的发生.
✓ 6>. 隔离原理: 藉分隔不同区域的方式,来达到保护某些地 区,使不能造成危险或错误的现象发生.隔离原理亦称保护 原理.
✓ 7>. 复制原理: 同一件工作,如需做二次以上,最好采用“复 制”方式来达成,省时又不错误.
✓ 3.三大分类为:
Hale Waihona Puke 大手法之二 — 动改法✓ 1>. 有关于人体动用方面之原则,共包含8项.
IE工业工程之动作经济原则(二)肢体动作改善

经研究的结果如下,发现最适当的重量是每次铲起21磅,每天工作量最高可达35吨。
每铲铲起的重量38磅33磅21磅15磅每天工作量25吨30吨35吨28吨原则6:连续曲线运动比方向突变的直线运动更好拿一只铅笔在纸上,一上一下划下来。
详细分析这个动作内容可以发现,这个动作由2个阶段构成,即"移动,停止再改变方向'。
在此例中,科学家研究的结果显示约75至80%的时间来移动铅笔,15~25%的时间是用来改变手的方向。
换句话说此15~25%改变方向的时间是没有生产性的,进一步的研究再显示出连续性的曲线运动其工作效率比方向突变的直线运动来得较佳。
方向突变不但浪费时间而且也容易引起疲劳。
原则7:弹道式运动较轻快人体固定肌肉的动作部份可以划分成二组。
一组为控制向内收缩的肌肉,另一组为控制向外抛出的控制肌肉。
当二者平衡时,手则静止不动;当二者不平衡时,则产生动作出来。
例如:以食指及大姆指拿笔来写字的动作,就是上式固定式两组不同配合运用肌肉支动的最佳例子。
而弹道式运动是一个较快而且容易的运作方式,因为只运用了其中一组的肌肉动作方向。
弹道式运动只有在初期,要开始动作之时,可以加以控制。
一旦运动出去之后就无法予改变方向。
例如:挥动高尔夫球杆时,一旦击出之后,杆子必会顺势挥出,无法予以在中途(例如在肩部之高度)停顿下来。
弹道式运动只有在下列情形下才会停止下来。
反方向的肌肉制止力量。
碰到阻碍物。
运动的动量消失了,如高尔夫球杆挥至超越头项时,动量已消失了,自然就停顿下来了。
弹道式运动方式,效率较高,速度较快,较有力量较精确,而且不容易引起肌肉疼痛。
比固定式的运动方式较舒畅,木匠打钉子之动作就是一个很好的运用弹道式之动作方式。
此外,例如英文打字、弹钢琴、拉小提琴及运动选手之动作都是很好的例子。
原则8:降低动作注意力过程中产生迷惑或需要判断时,动作会有停顿、迟凝。
所以,要通过各种方法减少需要判断、迟疑的动作。
降低动作注意力例子:放置螺丝刀的固定位以喇叭形为佳;需要对准及嵌入时,以导向槽及机构装置减少对准的难度;测量时用固定规格及定位等手段,使测量工作减少脑力判断过程;利用声光等进行识别,减少注意力。
IE工业工程——七手法与四原则
IE工业工程——七手法与四原则
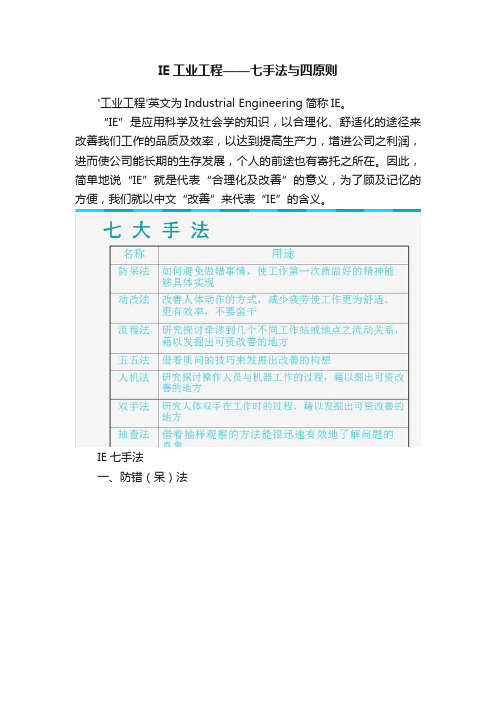
'工业工程'英文为Industrial Engineering简称IE。
“IE”是应用科学及社会学的知识,以合理化、舒适化的途径来改善我们工作的品质及效率,以达到提高生产力,增进公司之利润,进而使公司能长期的生存发展,个人的前途也有寄托之所在。
因此,简单地说“IE”就是代表“合理化及改善”的意义,为了顾及记忆的方便,我们就以中文“改善”来代表“IE”的含义。
IE七手法
一、防错(呆)法
防错(呆)法简介
防错(呆)法原则、原理二、改动法
动改法简介
动改法原则三、流程法
流程法四、五五法
五五法五、人机法
人机法六、双手法
双手法七、抽查法
抽查法
篇幅有限,七大手法仅做了解,深入内容及具体应用,共勉学习。
除了七大手法,还有IE四个原则就不得不提一下:
改善四原则
欲改变数字,就必须改变行动;欲改变行动,就必须改变目标;
欲改变目标,就必须改变想法;欲改变想法,就必须改变习惯;
欲改变习惯,就必须改变过去;欲改变过去,就必须改变知识;
欲改变知识,就必须改变欲望;欲改变欲望,就必须改善数字。
工业工程实验三双手操作分析
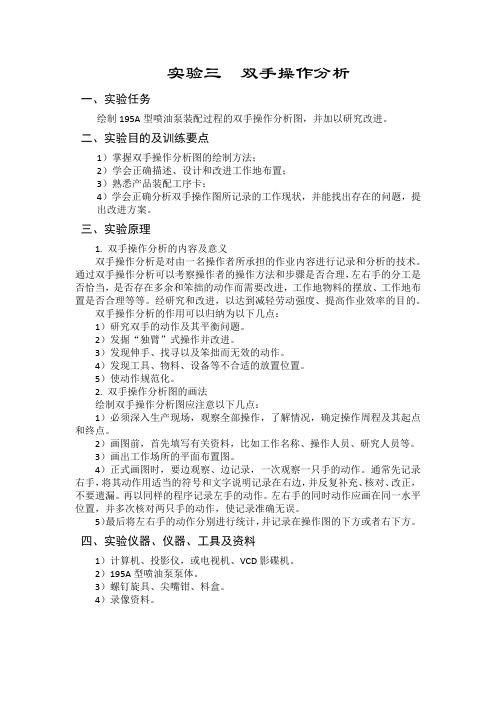
实验三双手操作分析一、实验任务绘制195A型喷油泵装配过程的双手操作分析图,并加以研究改进。
二、实验目的及训练要点1)掌握双手操作分析图的绘制方法;2)学会正确描述、设计和改进工作地布置;3)熟悉产品装配工序卡;4)学会正确分析双手操作图所记录的工作现状,并能找出存在的问题,提出改进方案。
三、实验原理1. 双手操作分析的内容及意义双手操作分析是对由一名操作者所承担的作业内容进行记录和分析的技术。
通过双手操作分析可以考察操作者的操作方法和步骤是否合理,左右手的分工是否恰当,是否存在多余和笨拙的动作而需要改进,工作地物料的摆放、工作地布置是否合理等等。
经研究和改进,以达到减轻劳动强度、提高作业效率的目的。
双手操作分析的作用可以归纳为以下几点:1)研究双手的动作及其平衡问题。
2)发掘“独臂”式操作并改进。
3)发现伸手、找寻以及笨拙而无效的动作。
4)发现工具、物料、设备等不合适的放置位置。
5)使动作规范化。
2. 双手操作分析图的画法绘制双手操作分析图应注意以下几点:1)必须深入生产现场,观察全部操作,了解情况,确定操作周程及其起点和终点。
2)画图前,首先填写有关资料,比如工作名称、操作人员、研究人员等。
3)画出工作场所的平面布置图。
4)正式画图时,要边观察、边记录,一次观察一只手的动作。
通常先记录右手,将其动作用适当的符号和文字说明记录在右边,并反复补充、核对、改正,不要遗漏。
再以同样的程序记录左手的动作。
左右手的同时动作应画在同一水平位置,并多次核对两只手的动作,使记录准确无误。
5)最后将左右手的动作分别进行统计,并记录在操作图的下方或者右下方。
四、实验仪器、仪器、工具及资料1)计算机、投影仪,或电视机、VCD影碟机。
2)195A型喷油泵泵体。
3)螺钉旋具、尖嘴钳、料盒。
4)录像资料。
五、实验内容及步骤本实验通过录像资料观察装配195A型喷油泵从拿泵体至装好推杆体的工作过程,然后将工作地布置简图及双手操作过程记录下来,根据动作经济原则,并采用“5W1H”提问技术和“ECRS”分析原则进行改进。
双手操作分析
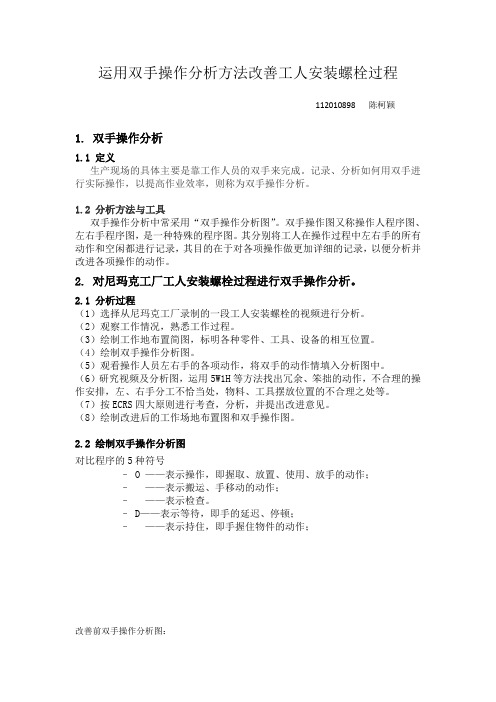
运用双手操作分析方法改善工人安装螺栓过程112010898 陈柯颖1. 双手操作分析1.1 定义生产现场的具体主要是靠工作人员的双手来完成。
记录、分析如何用双手进行实际操作,以提高作业效率,则称为双手操作分析。
1.2 分析方法与工具双手操作分析中常采用“双手操作分析图”。
双手操作图又称操作人程序图、左右手程序图,是一种特殊的程序图。
其分别将工人在操作过程中左右手的所有动作和空闲都进行记录,其目的在于对各项操作做更加详细的记录,以便分析并改进各项操作的动作。
2. 对尼玛克工厂工人安装螺栓过程进行双手操作分析。
2.1 分析过程(1)选择从尼玛克工厂录制的一段工人安装螺栓的视频进行分析。
(2)观察工作情况,熟悉工作过程。
(3)绘制工作地布置简图,标明各种零件、工具、设备的相互位置。
(4)绘制双手操作分析图。
(5)观看操作人员左右手的各项动作,将双手的动作情填入分析图中。
(6)研究视频及分析图,运用5W1H等方法找出冗余、笨拙的动作,不合理的操作安排,左、右手分工不恰当处,物料、工具摆放位置的不合理之处等。
(7)按ECRS四大原则进行考查,分析,并提出改进意见。
(8)绘制改进后的工作场地布置图和双手操作图。
2.2 绘制双手操作分析图对比程序的5种符号–O ——表示操作,即握取、放置、使用、放手的动作;–——表示搬运、手移动的动作;–——表示检查。
–D——表示等待,即手的延迟、停顿;–——表示持住,即手握住物件的动作;改善前双手操作分析图:操作移动检验等待握持握持等待检验移动操作○→□D ▽▽D □→○15●●5121●●12316●●16343●●3451●●15631●●31673●●3781●●1891●●191013●●1310111●●111121●●1121312●●1213142●●214158●●815162●●2161710●●1017182●●2181912●●1219201●●120等待等待等待拿起一个螺栓将螺栓拧入上盖拿起一个螺栓等待等待等待拿起一个螺栓将螺栓拧入上盖拿起一个螺栓将螺栓拧入上盖等待放入左手将垫片依次套入螺栓将多余的垫片放入零件盒拿起一个螺栓递给左手等待递给左手等待等待等待等待将螺栓拧入上盖等待等待将螺栓拧入上盖拿起一个螺栓等待等待持住螺栓等待等待持住垫片将螺栓依次立起来放在圆盘右侧摆好伸手抓取垫片伸手抓取8个螺栓放入左手双手操作分析工站名称 : 尼玛克工厂 工站图示:改善现场:______BU_______课______线 作 业 员:____________________研 究 者: ___陈柯颖_ 研究日期: _2014.6.20__________________作业方式:结束状态:螺栓装好时间单位:开始状态:双手空闲,放在工作台上作业单元说明单元顺序作业单元说明左手右手时间时间单元顺序改善前改善後站立坐姿mins2.3 根据双手操作改善原则,发现安装螺栓过程中存在下列问题:(1)零件区离工人较远,而且呈“一”字形横向排列,每次工人抓取零件都需要站起来;(2)工人抓取垫片不能一次抓到正好,多余的还需要放回去;(3)将垫片套入螺栓时左手一直是“持住”状态,而“持住”是非常疲劳的动作,同时也不能够左右手同时进行工作。
工业工程(IE)七大手法(完整版)

險或錯誤的現象發生.隔離原理亦稱保護原理. 7>. 復制原理: 同一件工作,如需做二次以上,最好采用“復制”方式來達成,
省時又不錯誤. 8>. 層別原理: 為避免將不同工作做錯,而設法加以區別出來.
IE七大手法之一 — 防呆法
2.應用範圍
任何工作無論是在機械操作、產品使用上,以及文書處理等皆可應用到.
IE七大手法之一 — 防呆法
3.基本原則 在進行”防呆法”時,有以下四原則可供參考:
1>. 使作業的動作輕鬆 2>. 使作業不要技能與直覺 3>. 使作業不會有危險 4>. 使作業不依賴感官 EXL: 在連續幾個測試站間加檔板,防止未測品流至下一站. 4.應用原理 1>. 斷根原理: 將會造成錯誤的原因從根本上排除掉,使絕不發生錯誤. 2>. 保險原理: 采用二個以上的動作必需共同或依序執行才能完成工作.
的主要工作.
大綱
IE 简介 IE 七大手法简介 IE 七大手法之一 防 呆 法 IE 七大手法之二 動 改 法 IE 七大手法之三 流 程 法 IE 七大手法之四 五 五 法 IE 七大手法之五 人 機 法 IE 七大手法之六 雙 手 法 IE 七大手法之七 抽 查 法 IE 手法之改善步骤
IE簡介
這里归纳为三大类/十大原則:
1>. 关于人体的运用; 2>. 关于工作地的布置; 3>. 关于工具设备
第一条原则:双手的动作应同时而对称 。
第二条原则:人体的动作应以尽量应用最低级而能得到满意结果为妥。
。級 別
一
二
三
四
精选工业工程系列双手并用法
雙手并用法在分析手法中的定位
3. 細微動作分析: 作用: 通過對于細微動素的分析, 發現操作人員的無效動作 及浪費現象, 簡化操作方法,減少工作疲勞,降低勞動 強度,并在此基礎上制定標准的操作方法, 為制定動作 時間標准做准備.
5
1
7
8
9
6
1 至第2摞資料
1 拿起第1頁資料
2 移動至面
2 1在下放置在桌子上
統 計
左 右
1005050200
1001000200
半成品區
99 至第10摞資料
99 拿起第20頁資料
100 移動至桌面
100 10在下放置在桌子上
進一步分析
還能改善嗎???
1. 左上角記錄其有關的一切必要資料. 2. 右上角畫工作場所的平面布置圖. 3. 左右手程序記錄. 4. 動作統計.
雙手程序圖的分析要點
采用“5W1H”提問技術,充分利用動作經濟原則,及取消.合并.重排.簡化等建立新方法的四大原則進行分析: 1. 分析.改善操作的要點: a.盡量減少操作中的動作 b.排列成最佳順序 c.有机會時合并動作 d.盡可能簡化各動作 e.平衡雙手動作 f. 改變產品設計 g.使夾具動作迅速 2. 采用提問技術: a. 有無操作可以經過改善剔除 b. 有無等待可以減免 c. 有無 動作可以簡化 d. 運送是否可以簡化
分析工具------雙手程序圖
雙手程序圖的作用: 研討雙手的動作及相互平衡. 偵察出“獨臂式”的操作. 研究反常放置物品的需要. 顯現出伸手,找尋及苯絀而無效的動作. 發現工具.物料.設備等不合适的位置. 研訂動作的范次与次序. 改善工作的布置. 協助操作技術的訓練.
分 析 運 用
1.請就剛才的雙手程序圖進行分析, 提出改善的方法?2.就改善方法繪制出新的雙手程序圖?
IE双手法
IE-设备 (好设备,才有好品质)
改良方法: 培 将零件盒除中间之外,皆分成二份,依
动作顺序对称排列
训
设计一个夹具使装配组件能放入夹具内。
教
材
IE工业工程部设备检修课 Tel: 8400 、8568、8569、8188、7016
IE-设备 (好设备,才有好品质)
动作顺序:
培
1.双手同时反向对称移动至橡皮零件盒处
训
教
THANK YOU!
材
IE工业工程部设备检修课 Tel: 8400 、8568、8569、8188、7016
培
原则1:两手同时开始及完成动作 训 原则2:除休息时间外,两手不应同时空
闲 教 原则3:两臂之作应反向同时对称。
材
IE工业工程部设备检修课 Tel: 8400 、8568、8569、8188、7016
IE-设备 (好设备,才有好品质)
说明:
培
此三原则相互关连可一并来讨论。大多数
人均惯于一手持住东西另一手去工作。这是吾人
IE工业工程部设备检修课 Tel: 8400 、8568、8569、8188、7016
IE-设备 (好设备,才有好品质)
“双手、同时、对称”动作之范例——螺
培
钉之装配欲将一个螺钉弹簧华司平面华司及 橡皮华司,组合与下列的情形:
训
左手取一螺钉,回原位,持住
左手取一弹簧华司装上螺钉
教
再取一平面华司装上螺钉
材
动作顺序:如前述,惟距离较短,皆在正常工作范
围内。
IE工业工程部设备检修课 Tel: 8400 、8568、8569、8188、7016
IE-设备 (好设备,才有好品质)
第三次改良后的方法:
IE七大手法工业工程课件
IE七大手法工业工程课件
11
擋板
NG 點膠前和點膠後未清楚區別
OK
點膠前和點膠後清楚區別
IE七大手法工业工程课件
12
– 藉“不对称的形状”来达 成
IE七大手法工业工程课件
13
IE七大手法工业工程课件
14
• 2.保险原理:藉用二个以上的动作必需共同或依序执行才 能完成工作,藉“共同”动作必须同时执行来完成。
例:“先进先出”架用来以正确的测试顺序分派 产品。当一盒产品拿出使用时,另一盒产品滑下 ,保证正确的次序。
IE七大手法工业工程课件
40
防错十大原理
• 6.隔离原理:藉分隔不同区域的方式,来达到保 获某些地区,使其不能造成危险或错误的现象发 生。隔离原理亦称保获原理。
– 例:家庭中危险的物品放入专门之柜子中加锁并置于 高处,预防无知的小孩取用而造成危险。
IE七大手法工业工程课件
35
檢查PCB治具
PCB背面零件過多,背檢無法檢查完全, 套上套板可以避免漏檢查
IE七大手法工业工程课件
36
DPS-200PB-138 A
---- 出 貨 段
之前 量線 材
客戶反饋卡 鉤變形
之后 量線 材
卡鉤防止變
形并防呆
IE七大手法工业工程课件
37
防错十大原理
• 5.顺序原理:避免工作之顺序或流程前后倒置, 可依编号顺序排列,可以减少或避免错误的发生。
对某一产品所需的部件预先清点 出来交给工人。如果产品批装配 完成后仍有部件剩余或者是部件 不够,马上就知道有异常发生。 这种检查方法可防止产品在缺件 的情况下流入市场。
IE七大手法工业工程课件
33
IE七大手法工业工程课件
工业工程七大手法

工业工程七大手法前言:质量代表了一个国家的科学技术、生产水平、管理水平和文化水平.产品质量的提高,意味着经济效益的提高.当今世界经济的发展正经历着由数量型增长向质量型增长的转变,市场竟争也由人格竟争为主转向质量竟争为主。
而所有企业的目的均系希望以最小的投入(INPUT)得到最大的产出(OUTPUT),以致独得最大的效益.那么如何在质量保证的基础上,使企业独得最大的效益呢?只有降低成本和提高企业的生产力,把这些“投入”做最有效的组合,以达到质量稳定、效率高、交期准、浪费少、成本低。
这就是近代工业界工业工程(IE)所要做的主要工作。
IE简介1.甚么是IE?IE就是指INDUSTRIAL(工业) ENGINEERING(工程)。
它由两字词之首字母组合而成。
2。
IE的起源?IE的基础也是最早的起源来自于『工作研究』,而『工作研究』的主要构成是来自泰勒(Frederick W.Taylor 1856~1915)的『工作研究』与吉尔布雷斯(Frank B Gilbreth 1868~1924)的『动作研究』二者所构成。
3。
IE的目的?应用科学及社会学的知识,以合理化、舒适化的途径来改善我们工作的质量及效率以达到提高生产力增进公司之利润进而使公司能长期的生存发展下去,个人的前途也有寄托之所在.因此,简单地说,IE的目的就是充分利用工厂的人力、设备、材料,以最经济有效的工作方法,使企业独得最大的效益。
4.为甚么要有IE?*持续的进步是企业及个人长久生存的根基。
*改善就是进步的原动力,没有改善就没有进步。
-学如逆水行舟,不进则退。
*改善是永无止境的,必须长久持续去进行.4。
IE的主要范围?*工程分析*价值分析(V。
A) *动作研究*工作标准*时间研究*时间标准*工厂布置*运搬设计5。
为甚么要有改善(IE)七大手法?*以不教而战,谓之杀.*徒然要求改善而不讲求方法、技巧,于事无补。
*给人一条鱼吃,不如教他捕鱼的技术.*要求捕更多的鱼,首先必须讲求捕鱼技术的传授与使用。
工业工程七大手法培训教材
a
1
目 录
2
主要内容
01
IE七大手法整体介绍
02
五五法
03
流程法
04
人机法
目 录
3
主要内容
05
双手法
06
动改法
07
防错法
08
抽查法
目 录
4
主要内容
01
IE七大手法整体介绍
02
五五法
03
流程法
04
人机法
一、IE七大手法的名称
5
二、IE七大手法的目的
6
三、IE七大手法——双手法
a
68
目 录
69
主要内容
05
双手法
06
动改法
07
防错法
08
抽查法
IE七大手法——动改法
a
70
IE七大手法——动改法
a
71
IE七大手法——动改法
a
72
IE七大手法——动改法
a
73
IE七大手法——动改法
a
74
IE七大手法——动改法
a
75
IE七大手法——动改法
(1) 抽查法: 首先协助我们去认清问题的所在以及问题的事实真象。
(2) 双手法、人机法、流程法: 协助我们进一步的认清事实的状况,以及建立其改善基
础的启发点。 (3) 五五法、防错法、动改法:
协助我们对己知的问题,探寻改善的具体方法,以实现 改善的目标。
7
四、IE七大手法与QC七大手法的差别
(1)"品管(QC)七手法"较着重于对问题的分析与重点的 选择,但对如何加以改善则较少可应用。 (2)“改善(IE)七手法”较着重于客观详尽地了解问题的现 象.以及改善方法的应用,以期达到改善目标. (3)有了"改善(IE)七手法"正可弥补品管(QC)手法的 缺陷,从而达到相辅相成的效果,使得改善的效果更为实际 也更容易实现,同时最重要是改善(IE)七手法也可单独使 用,因为其本身就具有分析和发掘问题的技巧,七手法有时 亦称为七工具。
工业工程之双手法课件

。
02
发展
随着科学技术的发展和管理理论的演进,工业工程不断吸收新理论和新
方法,逐渐形成了完整的学科体系。
03
应用
工业工程在实践中得到了广泛应用,成为企业提高竞争力的重要手段。
如今,工业工程已经发展成为一门全球性的学科,为世界各国的经济发
展做出了重要贡献。
02
CATALOGUE
双手法的概念与原理
双手法的定义与特点
。
双手法的局限性
适用范围有限
双手法主要适用于制造业,对于其他行业可 能不太适用。
实施难度较大
双手法需要投入大量时间和资源进行培训和 改进。
对员工技能要求高
实施双手法需要员工具备一定的技能和经验 。
对领导层支持度要求高
实施双手法需要得到领导层的支持和重视。
如何克服局限性
培训和教育
通过培训和教育提高员工的技能和意 识,使他们更好地适应双手法的实施 。
双手法的定义
双手法是一种工业工程的方法论 ,旨在通过分析作业人员双手的 操作过程,优化工作流程,提高 生产效率和产品质量。
双手法的特点
双手法注重实际操作和现场观察 ,通过对作业人员的双手操作进 行分析和优化,实现工作流程的 合理化、高效化和标准化。
双手法的应用范围
生产线优化
双手法可以应用于生产线上的各个环节,通过对作业人员的双手 操作进行优化,提高生产线的平衡率和效率。
工业工程之双手法课件
CATALOGUE
目 录
• 工业工程简介 • 双手法的概念与原理 • 双手法的实施步骤 • 双手法的应用案例 • 双手法的优势与局限性
01
CATALOGUE
工业工程简介
工业工程的定义与特点
工业工程七大手法

以“压力”控制的方式来完成
例:厨房内之快锅内压力过大时,则“泄压阀”就开启,使锅内 之压力外泄以免造成爆炸之危机。
4 相符原理
藉用检核是否相符合的动 作,来防止错误的发生。
4 相符原理
依“形状”的不同来达成
例:个人电脑与监视器或印表机之连结线用不同之形状设 计,使能正确连接起来。
依“符号”指示来达成
To Next Process 下一过程
错误
*
8
错误有各种不同的类别
几乎所有的缺陷有人的错误而产生。 人至少有十种错误
健忘 误解产生的错误 识别错误 新手错误 故意的错误 疏忽的错误 迟钝的错误 缺少标准的错误 意外的错误 蓄意的错误
错误的类型有几种
几乎所有的缺陷都由人类的错误产生。但至少有10 种人因错误 1. 遗忘:有时当我们不集中精神时我们会忘记事情。 例如,站长忘记放下交叉门。 安全措施:预先警告操作者或定期检查。 2. 误解产生的错误:有时在我们熟悉情况前得出错 误结论时会出错。例如,当不熟悉自动变换器的人 踏在刹车上时会认为是离合器。 安全措施:训练,预先检查,标准化工作程序。
4 相符原理
以“声音”方式来检核
例:附有音乐之计算机,当接键力道不够时,音乐不响表示 数字没有键入,必须重新再键入。
以“数量“方式来检核
例:开刀手术前后必须点核数量有否符合,以免有工具遗留 在人体内,忘了拿出来。
以“发音“方式来检核
在电话中 老王:“老李!这是第5号投票所,现在向你报告我们这开票 的结果:张大伟先生是4票” 老李:“什么,请再说一遍,是10票吗?” 老王:“不是, 不是10票,是4票。”
IE七大手法简介
(1)防错法 如何避免做错事情,使工作第一次就做好的精神 能够具体实现 (2)动改法 改善人体动作的方式,减少疲劳使工作更为舒适, 更有效率,不要蛮干. (3)流程法 研究探讨牵涉到几个不同工作或地点之流动关系, 以发掘也可资改善的地方. (4)五五法 藉着质问的技巧来发掘出改善的构想
精益生产经典课程6.双手法[4872]
![精益生产经典课程6.双手法[4872]](https://img.taocdn.com/s3/m/bf5e55cdf90f76c661371acc.png)
正常工作范围:在坐着的状态双手的正常活动可以到达的
范围,称为正常工作范围,大约在37~40公分的范围内。
16
IE七大手法
丰田生产模式TPS学习
双手法实例讲解: 实例1:对加工完的一批轴套零件检查其长度并装入套筒。
轴
套筒
尺 验装完毕者
工人
布置图
17
IE七大手法
工作:检查轴的长度及装入套筒 开始:双手空时--用品在台上 结束:装好一只放在旁边
1 3
3
等待测定长度 带轴至近中央处离身体最近一排的套筒 插入套筒内
操作者
改良方法
左手 3
右手 3
3
3
1
1
7
7
19
IE七大手法
丰田生产模式TPS学习
双手法实例讲解:改善效果分析
改善后使双手动作数目均减少,同时达到双手同时对称
的动作原则,也取消了下列3种无效的动作:
一只手持物,另一只手的往复动作。
5
IE七大手法
丰田生产模式TPS学习
双手法的简介:
双手操作法,也叫双手作业分析法,简称为“双手法” , 是研究人体双手在工作时的过程,藉以发掘出可改善的地方。 以图表的方式,来记录操作者双手(足)的动作过程,藉此记 录来做进一步的分析和改善。
6
IE七大手法
丰田生产模式TPS学习
双手法的目的:
有一个古老的故事说:“上帝造人为何要给一个嘴巴, 二个眼睛,二个耳朵以及二双手呢?”
丰田生产模式TPS学习
工作:检查轴的长度及装入套筒 开始:双手空的,用品在台上 结束:装好一只 工具:两支标准长的尺固定在台上
轴 套筒
标准长的尺
左手
同右 1
工业工程的七大手法

① 工序平衡,分担作业 ① 使用夹具,解放双手 ② 使用导向装置,工件自动规整
IE七大手法之七— 工作抽查法
1.定义
26
工作抽查法系指应用统计学上的抽样原理来研究工作中人员与机器设备之活动 情形,它是一个了解事实最有效的工具之一.它可在最短的时间和最低的成本之下获得有 关人与设备之间的有用信息.
2.常用的三种主要用途:
工业工程的七大手法
工业工程10-1班
王伟波
IE七大手法有哪些?
1.防错法 体实现. 2.动改法 改善人体动作的方式,减少疲劳使工作更为舒适、更有 如何避免做错事情,使工作第一次就做好的,精神能够具
效率,不要蛮干. 3.流程法 研究探讨牵涉到几个不同工作站或地点之流动关系,藉
以发掘出可资改善的地方.
R(Reach)
1 移动 M(Move)
移动物料或工具或运实
2
3 4 5 6 7
抓取
放手 组装 抓正 使用 拆卸 精神 作用 等待 保持
Gr(Grasp)
Rl(Release) Asy(Assemble) PP(PrePosition) Use Dsy(DisAssmble) MP(MentalProcess ) W(Wait) H(Hold)
台湾公司教材里面的 七大手法
1、工程分析。 2、搬运工程分析 3、运动分析(工作抽查[work sampling]) 4、生产线平衡 5、动作分析 6、动作经济原则 7、工厂布置改善。
七大手法之一—
1.意义
防错法
防错法又称防愚法,其义为防止愚笨的人做错事.也就 是说,连愚笨的人也不会做错事 如何设计一个东西(一套方法),使错误绝不会发
的发生,但是可以降低其损害的程度.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业工程之双手法
双手法的目的: 有一个古老的故事说:“上帝造人为何要给一个嘴巴,
二个眼睛,二个耳朵以及二双手呢?” 那是因为上帝希望每一个人能少说,多看,多听,多做。
工业工程之双手法
双手法实例讲解: 实例3:组装螺栓和螺帽的双手作业分析。 记录:把螺栓和螺帽组成一套,再把组装件放到组件箱内, 见下图:
工业工程之双手法
作 业:组装螺栓和螺帽 方 法:现行 开 始:双手空的 结 束:装好一套放入组件箱 操作者: XXX
左手
伸向螺栓 1
抓起一螺栓
1
移至作业位置 2
成品
一般工作台
作业员
等待右手取成品 同右手 同右手 取PE袋
等待
从流水线取成品(伴 有转腰动作) 除产品静电
检查产品外观
将产品装入PE袋
将成品放回流水线 (伴有转腰动作)
左手
0 2 2 1
5
右手
1 0 2 2
5
工业工程之双手法
作 业:外观检测及除静电 方 法:改善后 开 始:双手空的 结 束:吹好一件放入流水线 操作者:XXX
工业工程之双手法
2020/11/11
工业工程之双手法
IE七大手法
Green Belt:Clark Zhang
工业工程之双手法
IE七大手法:
(1)防呆法/防错法(Fool-Proof) (2)动作改善法(动作经济原则) (3)流程程序法 (4)5 × 5WIH(5X5何法) (5)人机配合法(多动作法) (6)双手操作法 (7)工作抽查法
工业工程之双手法
双手法的精髓: 简单来说就是:
用四种符号一张图,记录人体双手(足)动作过 程,解决双手操作的“闲置”,发挥双手能力。
工业工程之双手法
3rew
演讲完毕,谢谢听讲!
再见,see you again
2020/11/11
工业工程之双手法
防呆法 动改法 流程法 五五法 人机法
双手法
抽查法
工业工程之双手法
目录
1、双手法的简介 2、双手法的目的 3、双手法的特征 3、双手法的作用 4、双手作业图 5、双手法实例讲解 6、双手法的注意事项 7、双手法的精髓
工业工程之双手法
双手法
工业工程之双手法
双手法的简介: 双手操作法,也叫双手作业分析法,简称为“双手法” ,
工业工程之双手法
双手作业图:双手作业图的作用 双手作业图以双手操作为对象,采用标准流程图符号来
记录其动作,表示其关系,并可指导作业者如何有效地运用 双手,从事生产性的工作,提供一种新的动作观念,找出一 种新的改善途径。
工业工程之双手法
双手作业图:双手作业图的画法 ➢ 图的左上部:填写常规项目,包括编号、作业名称、地点、 作业人员、作业的起点、终点(结束)、日期等。 ➢ 图的右上部:填写工作地布置平面简图,并表明各种零件、 工具、设备的位置。 ➢ 图的中间部分:分别在左右两边填写左、右手动作的代表 符号及动作说明。 ➢ 图的右下方:对左、右手的动作进行统计。
作业员
成品
将上一个成品放回 流水线 同右手
同右手 取PE袋
工时由原来的:
从流水线取成品 除产品静电 检查产品外观 将产品装入PE袋
18.10”
13. 52”
工业工程之双手法
双手法实例讲解: 实例4:电子产品外观检测及除静电。 通过双手作业改善后,节省工时,提高效率。
工业工程之双手法
双手法的注意事项: 应用双手操作分析时需要注意的问题: ➢ 对需要高度注意力,有可能出现安全和质量事故的操作, 在没有确保足够安全的前提下,不要轻易实施双手操作。 ➢ 双手操作的对象物重量不能过重,通常应该在2kg以下。 ➢ 双手操作的频率要适宜,且频率快慢能够控制和调节。
统计
左手 3
右手 3
2
3
1
0
0
0
6
6
工业工程之双手法
双手法实例讲解: 实例4:电子产品外观检测及除静电。 某公司电子产品出厂前必须经过外观检测及除静电,如 下图,该工序单手作业,伴有转身动作。
工业工程之双手法
作 业:外观检测及除静电 方 法:改善前 开 始:双手空的 结 束:吹好一件放入流水线 操作者:XXX
本例对工作场地重新布置和改变工具的使用就能对原不
良作业方法进行改进,使双手达到对称、平衡,动作规范化,
效率显著提高。
工业工程之双手法
双手法实例讲解:
实例2:将玻璃管切成定长。 原方法是将玻璃管压到夹具末端的停档上,用锉刀做标
记,然后松回一些,开切口。接着从夹具中取出,双手把它 折断。这一方法的双手作业图如图所示:
左手
右手
至轴
1
1
至尺
拿起一轴
1
带轴至尺 2
检
1 拿起尺
验
2
带尺至轴
等待测定长度 1
1 测定长度
2 尺放下
放下装毕之轴及套筒 2
3
至套筒
等
待
3 拿起一套筒
4
带套筒回原位
4 将套筒装轴上
2 等待
轴
套筒
尺 验装完毕者
工人
布置图
现行方法
左手 2
右手 4
2
4
1
2
5
10
工业工程之双手法
工作:检查轴的长度及装入套筒 开始:双手空的,用品在台上 结束:装好一只 工具:两支标准长的尺固定在台上
工业工程之双手法
作 业:组装螺栓和螺帽 方 法:改进 开 始:双手空的 结 束:装好一套放入组件箱 操作者:XXX
左手
右手
左手至螺栓 1
抓起一螺栓
1
1 1
右手至螺帽 抓住一螺帽
移至作业位置 2
2
移至作业位置
把螺栓与螺帽组装
2
2
把螺帽与螺栓组装
持住螺栓
1
3
转动螺帽
把组件放进组件箱
3
3
松开手回到初始位置
夹 头
时间
(min)
右手说明
拿起锉刀
握住锉刀
将锉刀移向玻璃管
握住锉刀
用锉刀在管子上刻槽
握住锉刀
握住锉刀
将锉刀移向玻璃管
刻玻璃管
将锉刀放在桌子上
移向管子
弯管子
放开切下的一段
锉
工业工程之双手法
双手法实例讲解:分析与探讨 用“5W1H”质问技术检查原方法的细节: ➢ 为何玻璃管放在夹具中必须用手握住? 因为夹具夹住的长度与管子总长度相比是很短的,因此 需始终拿住管子。 ➢为何不在管子旋转时开切口,而免得右手闲着? 没有理由说明管子为什么不能边转边切口。
玻璃管 刻记号处
夹 头
工业工程之双手法
工作:将玻璃管切成定长 开始:握住玻璃管 结束:做好一个 方法:现行
左手说明 握住玻璃管
时间
(min)
到卡具
插入卡具
压向后端
握住玻璃管
稍稍退出玻璃管
将玻璃管旋转120 。-180 。
压向后端
握住管子
退出管子
把管子移给右手
把管子折断
握住管子
在管子上重抓一把
玻璃管 刻记号处
轴 套筒
标准长的尺
左手
同右 1
同右
1
带轴至左边尺 2
同右
2
等待测定长度
1
同右 3
同右
3
右手
1
至近中央处离身体最近一排的轴
1 2
取一轴 带轴至右边尺
2 将轴放尺上,并使一端靠紧尺
1 3
3
等待测定长度 带轴至近中央处离身体最近一排的套筒 插入套筒内
操作者
改良方法
左手 3
右手 3
3
3
1
1
7
7
工业工程之双手法
双手法实例讲解:改善效果分析
改善后使双手动作数目均减少,同时达到双手同时对称
的动作原则,也取消了下列3种无效的动作:
➢ 一只手持物,另一只手的往复动作。
➢ 将套入的方法改变,使轴直接套入套筒,节省套筒拿起与
放下的无效动作。
➢ 改变原来用的普通尺为标准长度的尺,并固定台上,省去
每次将尺重复的拿起、放下的动作。
工业工程之双手法
双手作业图:符号及含义:
符号
含义 移动 把持 等待
详细说明
表示手由一个地方移动到另一个地方
一只手握住一个物体,另一只手正在工作,握住东西 的手,就是“把持”的状态 一只手正在等待下一பைடு நூலகம்动作
作业或操作 手正在从事生产性的动作
EXL
——
将物体结合在一起,分开、弯曲、转动、对准、拿起 、放下、抓取等等
用旧方法需要两手折断管子。如果能设计一种新夹具, 就可能无此必要了。
工业工程之双手法
双手法实例讲解:改善方案设计
通过以上分析,重新设计一种夹具,支承件可在夹具底 座上移动,根据切成定长进行调整,然后夹紧,将开切口放 在支承件的右边。因此,轻轻一敲,短头就断下来,没有必 要再取出管子,用双手来折断它。改进后的双手作业图如下:
工业工程之双手法
双手作业图:双手作业图的画法
编 号: 作业名称: 地 点: 作业人员: 开 始: 结 束: 日 期:
工作地点布置平面简图:
左、右手动作的代表符号及动作说明:
左、右手动作统计:
工业工程之双手法
双手作业图:绘制双手作业图时的注意事项
➢ 开始记录前,要对整个作业周期认真研究若干次。 ➢ 每个作业周期开始时,应以拿起新的工件的动作作为开始 记录的起点。 ➢ 一次记录一只手的动作,从左手或右手开始均可,一般应 从工作最多的一只手开始,并将全部操作记录完毕。 ➢ 当左、右手同时动作时要记录在同一水平线上,顺次发生 的动作,要记录在不同水平线上。要多次核对左右手动作关 系,使记录准确无误。