柯马COMAU机器人总览
工业机器人发展史

机器人是人类二十世纪的一项重要发明。
但其实在很久以前,世界上就出现了“机器人”的踪影。
机器人(ROBOT)的定义Robot来源于捷克作家Karel apek 1920年的剧本《罗沙姆的万能机器人公司》,Capek把捷克语“Robota(奴隶)”写成了“Robot”,该剧描写了Robot从只会劳动没有思维的奴隶发展到消灭人类,后又进化为人类的社会悲剧。
为了防止机器人伤害人类,科幻作家阿西莫夫(Asimov)于1940年发表的作品《Runaround》提出了机器人的伦理性纲领—“机器人三原则”:1)、机器人不应伤害人类;2)、机器人应遵守人类的命令,与1)违背的命令除外;3)、机器人应能保护自己,与1)、2)相抵触者除外。
机器人的发展传说我国关于机器人的传说历史悠久:《列子.汤问》记载着这么一个故事,公元前900多年西周周穆王时,巧匠偃师制作了一个“能唱歌、跳舞,像真人一样”的人偶;三国时期蜀国丞相诸葛亮为了给北伐的大军提高粮食,发明了运输工具木流牛马。
不过严格意义上这些都不能算是机器人,或者说和我们目前所接触的机器人是不一样的。
且不说他们的背后有没有事实依据,就算是真的,这类的所谓“机器人”也多为人工控制,如特洛伊木马一般,没有高效率的能源驱动,在那个年代如何做到“栩栩如生”?可能更多的还是传说吧。
工业机器人的诞生与发展1954年乔治·德沃尔申请了一个“可编辑关节式转移物料装置”的专利,与约瑟夫·恩格尔伯格合作成立了世界上第一个机器人公司Unimation。
1959年Unimation研制出第一台工业机器人Unimate,并在1961年将其应用到汽车生产线上,用于将铸件中的零件取出。
Unimation 是Universal和Automation的组合。
德沃尔和恩格尔伯格也被称为工业机器人之父。
1973年,第一台机电驱动的6轴机器人面世。
德国库卡公司(KUKA)将其使用的Unimate机器人研发改造成其第一台产业机器人,命名为Famulus,这是世界上第一台机电驱动的6轴机器人。
工业机器人的发展历史

1.1. 工业机器人发展史1.1.1. 1959-1978机器人技术发展阶段1956年,美国发明家乔治?德沃尔(George Devol ) 和物理学家约瑟?英格柏格(Joe Engelberger )成立了一家名为Un imation 的公司。
公司名字来自于两个单词“ Un iversal ” 和“ Animation ”的缩写。
1959年,乔治•德沃尔和约瑟•英格柏格发明了世界上第一台工业机器人,命名为Unimate (尤尼梅特),意思是“万能自动”。
英格伯格负责设计机器人的“手”、“脚”、“身体”,即机器人的机械部分和完成操作部分;由德沃尔设计机器人的“头脑”、“神经系统”“ “肌肉系统”,即机器人的控制装置和驱动装置。
Unimate重达两吨,通过磁鼓上的一个程序来控制。
它采用液压执行机构驱动,基座上有一个大机械臂,大臂可绕轴在基座上转动,大臂上又伸出一个小机械臂,它相对大臂可以伸出或缩回。
小臂顶有一个腕子,可绕小臂转动,进行俯仰和侧摇。
腕子前头是手,即操作器。
这个机器人的功能和人手臂功能相似。
Un imate的精确率达1/10000英寸。
1961 年,Unimation 公司生产的世界上第一台工业机器人在美国特伦顿(新泽西州首府)的通用汽车公司安装运行。
这台工业机器人用于生产汽车的门、车窗把柄、换档旋钮、灯具固定架,以及汽车内部的其他硬件等。
遵照磁鼓上的程序指令,Uni mate机器人4000磅重的手臂可以按次序堆叠热压铸金属件。
Unimate机器人成本耗资65000美元,但unimation公司售价仅为18000美兀。
1962年,美国机械与铸造公司(American Machine and Foundry , AMF 制造出世界上第一台圆柱坐标型工业机器人,命名为Verstran (沃尔萨特兰),意思是“万能搬动”。
1962年,AMF制造的6 台Verstran 机器人应用于美国坎顿(Canton)的福特汽车生产厂。
中国工业机器人品牌企业

上海ABB工程有限公司成立于1999年,是ABB独资企业。公司位于上海浦东康桥工业区,占地面积达10万平方米,包括建筑面积72000平方米的生产和办公区域,目前拥有1500名员工。上海ABB工程有限公司是ABB的重要本地企业之一,是ABB在华工业机器人以及系统业务(机器人)、仪器仪表(自动化产品)、变电站自动化系统(电力系统)和集成分析系统(过程自动化)的主要生产工程基地。上海ABB工程有限公司自2008年起,连续三年跻身ABB十家“中国工业电力100强企业”之列。
ABB“即插即用”的自动化工作站StampPack,配备的功能包拥有安全、快速、易用和高柔性等特性;适配的冲压专用编程软件StampWare,具有柔性化独立的安装方式,能降低整线投资成本和人工培训成本。该演示单元同时配备ABB机器人远程服务系统。
ABB领先的超柔性化白车身解决方案,含柔性车身定位系统FlexPLP、柔性车身输送系统FlexTrack以及能向客户提供完整的焊接解决方案的伺服焊枪,全面展示ABB白车身多轴D-同运作技术。该演示单元同时配备ABB机器人远程服务系统。
柯马于1997年正式进军中国市场,积极倡导“欧洲技术,本土制造”的先进服务理念,与本地客户建立起广泛合作关系,在动力总成、车身焊装、汽车工程、机器人及维护服务五大领域,与上海通用、上海大众、上汽集团、中国一汽、奇瑞汽车等众多汽车制造商建立合作,2010年柯马在华订单额达1.5亿欧元。
2001年在上海注册独资公司柯马(上海)工程有限公司。柯马坐落于上海松江泗泾工业园区,拥有员工约1000人。在未来两年,柯马总部及菲亚特集团还将加大对华投资力度,派遣优秀的专家前来传授先进的经验知识,着力培养本地技术人员和管理人员,逐步实现高管人才和技术人才本地化。柯马在满足用户需要的基础上,坚持在高科技产品研发上不懈努力,我们也更加重视技术创新、技术领先方面领导整个行业。
柯马项目管理进程中的PMO商业模式 Project Management Development in Comau

COMAU: introduction
BUSINESS SEGMENTS IN CHINA 柯马中国的三大业务板块
Comau (Shanghai) engineering Co.,Ltd
BUSINESS LINES 事业部
Automotive 汽车工业板块
Service 工业外包服务板块
Aerospace & Eco engineering 飞机制造与绿色工程板块
14个国家
● More than 90 PMI® CERTIFIED PROJECT
MANAGERS 逾90个PMI认证的项目经理
● 11,700 EMPLOYEES WORLDWIDE
11,7000 名员工
● 7,900 EMPLOYEES IN EMERGING COUNTRIES
7,900名员工来自于新兴国家
Benchmarking
标杆对照
Cost reduction and continuous
improvements
成本控制
Mentorship
指导能力
Lessons learned files 经验教训总结
Problem-solving hotline 常见问题解答
Methodologies
方法
Career path
1个团队
● OVER 35 YEARS OF EXPERIENCE
逾35年市场经验
● 3 RESEARCH & DEVELOPMENT CENTERS
3个研发中心
● 14 MANUFACTURING PLANTS
14家工厂
● 23 DIFFERENT LOCATIONS
23 个办公地点
工业机器人

工业机器人定义:工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。
它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
工业机器人的应用领域:应用领域广泛工业机器人与自动化成套装备是生产过程的关键设备,可用于制造、安装、检测、物流等生产环节,并广泛应用于汽车整车及汽车零部件、工程机械、轨道交通、低压电器、电力、IC装备、军工、烟草、金融、医药、冶金及印刷出版等众多行业,广泛使用在点焊、弧焊、装配、材料加工、物流搬运、码垛、拾取及包装、机床上下料、喷涂及喷装等工艺流程著名工业机器人厂家:发那科(FANUC)——日本FANUC(发那科)是日本一家专门研究数控系统的公司,成立于1956年,是世界上最大的专业数控系统生产厂家,目前占据全球70%的数控系统市场份额。
该公司的机器人产品系列多达240种,负重从0.5公斤到1.35吨,广泛应用于装配、搬运、焊接、铸造、喷涂、码垛等不同生产环节。
库卡(KUKARoboterGmbh)——德国库卡(KUKA)是世界工业机器人和自动控制系统领域的顶尖制造商,产品广泛应用于汽车、冶金、食品和塑料成形等行业。
KUKA在全球拥有20多个子公司,其中大部分是销售和服务中心。
共产品最通用的应用范围包括工厂焊接、操作、码垛、包装、加工或其他自动化作业。
ABBRobotics机器人——瑞典ABB集团总部位于瑞士苏黎世,由两个历史均达100多年的国际性企业瑞典的阿西亚(ASEA)和瑞士的布朗勃法瑞(BBCBrownBoveri)在1988年合并而成。
ABB是电力和自动化技术领域的领导者,其机器人产品和解决方案广泛应用于汽车制造、食品饮料、计算机和消费电子等众多行业的焊接、装配、搬运、喷涂、精加工、包装和码垛等不同作业环节。
安川电机(YaskawaElectricCo.)——日本安川电机自1977年研制出第一台全电动工业机器人以来,已有28年的机器人研发生产历史,旗下拥有Motoman美国、瑞典、德国以及SyneticsSolutions美国公司等子公司。
工业机器人的发展历史
工业机器人的发展历史 work Information Technology Company.2020YEAR1.1.工业机器人发展史1.1.1.1959-1978 机器人技术发展阶段1956年,美国发明家乔治•德沃尔(George Devol)和物理学家约瑟•英格柏格(Joe Engelberger)成立了一家名为Unimation的公司。
公司名字来自于两个单词“Universal”和“Animation”的缩写。
1959年,乔治·德沃尔和约瑟·英格柏格发明了世界上第一台工业机器人,命名为Unimate(尤尼梅特),意思是“万能自动”。
英格伯格负责设计机器人的“手”、“脚”、“身体”,即机器人的机械部分和完成操作部分;由德沃尔设计机器人的“头脑”、“神经系统”、“肌肉系统”,即机器人的控制装置和驱动装置。
Unimate重达两吨,通过磁鼓上的一个程序来控制。
它采用液压执行机构驱动,基座上有一个大机械臂,大臂可绕轴在基座上转动,大臂上又伸出一个小机械臂,它相对大臂可以伸出或缩回。
小臂顶有一个腕子,可绕小臂转动,进行俯仰和侧摇。
腕子前头是手,即操作器。
这个机器人的功能和人手臂功能相似。
Unimate的精确率达1/10000英寸。
次,由美国、欧洲或亚洲的某个国家机器人协会主办。
1973年,第一台机电驱动的6轴机器人面世。
德国库卡公司(KUKA)将其使用的Unimate机器人研发改造成其第一台产业机器人,命名为Famulus,这是世界上第一台机电驱动的6轴机器人。
1973年,日本日立公司(Hitachi)开发出为混凝土桩行业使用的自动螺栓连接机器人。
这是第一台安装有动态视觉传感器的工业机器人。
它在移动的同时能够认识浇铸模具上螺栓的位置,并且和浇铸模具的移动同步,完成螺栓拧紧和拧松工作。
1974年,第一台小型计算机控制的工业机器人走向市场。
1974年,美国辛辛那提米拉克龙(Cincinnati Milacron)公司的理查德·霍恩(Richard Hohn)开发出第一台由小型计算机控制的工业机器人,命名为T3,即“The Tomorrow Tool”。
工业机器人技术基础-第一章-机器人基础知识

任务一 认识工业机器人
图1-1-1 世界上第一台工业机器人Unimate
任务一
2.工业机器人的发展现状
认识工业机器人
机器人作为20世纪人类最伟大的发明之一,自20世纪60年代初问世以来,从简单机
器人发展到智能机器人,意味着机器人技术的发展已取得长足进步。
2005年,日本安川(YASKAWA)公司推出能够从事此前由人类完成的组装及搬运作业 的产业机器人MOTOMAN-DA20和MO-TOMAN-IA20,如图1-1-2所示。MOTOMAN-DA20 机器人是一款在仿造人类上半身的构造物上配备2个六轴驱动臂型的双臂机器人,其上半身 构造物本身具有绕垂直轴旋转的关节,尺寸与成年男性大体相同,可直接配置在此前人类进 行作业的场所。因为可实现接近人类两臂的动作,因此MOTOMAN-DA20机器人可以稳定 地搬运工件,还可以从事紧固螺母以及部件的组装和插入等作业。另外,它与协调控制2个臂 型机器人相比,占地面积更小。其单臂负重能力为20kg,双臂最多可搬运40kg的工件。
任务一 认识工业机器人
(1)第一代机器人——示教再现机器人 示教再现机器人能够按照人类预先示教的轨迹、 行为、顺序和速度重复作业。示教可以由操作人员手把手地进行。例如操作人员握住机器 人上的喷枪,沿喷漆路线示教一遍,机器人会记住这一连串运动,工作时,自动重复这些运动, 从而完成给定位置的涂装工作。这种手把手示教方式即所谓的直接示教, 如图1-1-6a所示。 但是,比较普遍的方式是通过示教器示教,如图1-1-6b所示。操作人员利用示教器上的开关或 按键来控制机器人一步一步运动,机器人自动记录,然后重复。目前在工业现场应用的机器 人大多属于第一代机器人。
管组件受到机械性损伤,而且可以防止软管在机器人改变方
comau机器人

法兰机器人侧 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.2 法兰刀具侧 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.7 备件清单 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.14
3. 操作应用程序的自动换刀机构 500 KG (25 KN) . . . . . . . . . . . . . . . . .3.1
技术数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1 机器人 NH1 的操作配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2
LB-CU-NH0-SPTTOC.fm
I
概述
操作 : 换刀机构、刀具侧、机器人 NH2-NH3 . . . . . . . . . . . . . . . . . . . . 4.9 气动 / 电动焊枪焊接配置和操作机器人 NH4 的配置 . . . . . . . . . . . . . . . . . . 4.10
系统安全 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7 机械紧急释放 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7 可用型式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7
工业机器人技术基础课件2:工业机器人的发展

同比
45%
100
40%
35% 80
30%
60
25%
20%
40
15%
10% 20
5%
0
0%
2013 2014 2015 2016 2017 2018 2019 2020
图1-19 2013-2020年中国工业机器人销售额情况
任务二 工业机器人的发展现状及趋势 2.中国工业机器人的发展状况
(3)工业机器人密度提高
任务二 工业机器人的发展现状及趋势 1.全球工业机器人的发展状况
图1-12 2011-2015年全球主要区域工业机器人的销售情况
任务二 工业机器人的发展现状及趋势 1.全球工业机器人的发展状况
从 国 家 层 面 来 说 , 也 存 在 着 发 展 不 均 衡 的 现 象 。 如 图 1-13 是 2015年全球工业机器人市场各国占比情况。从图中可以看出,2015 年中国工业机器人销量占到了全球工业机器人总销量的27%。实际上 从2013年开始,中国已经是全球工业机器人年销量最大的国家。
图1-14 2015年全球工业机器人主要应用行业销售占比
任务二 工业机器人的发展现状及趋势
1.全球工业机器人的发展状况
目前,国际上主要的工业机器人生产企业如表1-1所示,主 要分为欧系和日系。欧系中主要有德国的KUKA、CLOOS,瑞 士的ABB,意大利的COMAU,英国的Autotech Robotics等。 日系中主要有安川(YASKAWA)、OTC、松下(Panasonic) 和发那科(FANUC)等。
1.全球工业机器人的发展状况
在1958年,恩格尔伯格和德沃尔联手制造出 第一台真正实用的工业机器人(如图1-8所示), 并很快得到了应用;随后,他们成立了世界上第 一家机器人制造工厂——Unimation公司,并将 第一批机器人称为“Unimate”,意思是“万能 自动”,恩格尔伯格因此被称为“工业机器人之 父”。机器人“Unimate”是通过一个计算机, 来控制一个多自由度的机械,通过示教存储程序 和信息,工作时把信息读取出来,然后发出指令, 这样的话机器人可以重复的根据人当时示教的结 果,再现出这种动作,该类机器人的特点是它对 外界的环境没有感知。
工业机器人技术及应用兰虎第1章
认 知
行为、顺序和速度重复作业,示教可由操作员手把手进行或通过示教器完成 。
】
手把手示教
13/28
示教器示教
返回 目录
1.4 工业机器人的分类及应用
所 1.4.1 工业机器人的分类
处
位 置
( 2 ) 感知机器人 第二代工业机器人程具有环境感知装置,能在一定度上
——— 适应环境的变化,目前已经进入应用阶段。
章节目录
学习目标
导入案例
1.1 什么是工业机器人
1.2 为何发展工业机器人 1.3 工业机器人发展概况
1.3.1 工业机器人的诞生 1.3.2 工业机器人的发展 … .
课堂认知 本章小结
思考练习
1.4 工业机器人的分类及应用
1.4.1 工业机器人的分类 1.4.2 工业机器人的应用
返回 目录
1/28
——— 50 mm 宽的通孔,可以保护机械臂上的整套保护气体软管的敷设。
—
【 课 堂 认 知
】
KR 5 arc HW
返回 目录
10/28
1.3 工业机器人发展概况
所 1.3.2 工业机器人发展现状和趋势
处
位 置
FANUC 推出的 Robot M-3iA 装配机器人采用四轴或六轴模式,具有独特的平
——— 行连接结构,具备轻巧便携的特点,承重范围可达 6 kg 。
返回 目录
4/28
1.1 什么是工业机器人
所
处
位
置
———
—
广义地说:工业机器人是一种在计算机控制下的
【 课
可编程的自动机器。它具有四个基本特征:
堂
认
知 】
① 特定的机械机构
工业机器人发展趋势论文

工业机器人的发展趋势论文摘要:近年来德国率先提出"工业4.0"概念,美国推行"先进制造伙伴关系"计划,日本实施"智慧制造系统",而中国也提出了"中国制造2025规划",这些都指向同一个目标,那就是希望通过先进的IT与自动化技术来促进制造业的革新,以实现"智能化",提升效率,降低成本。
而要实现这个目标工业机器人是不可或缺的一环。
一、工业机器人的发展背景1920年,"Robot"这个词被捷克剧作家创造出来,到现在机器人已经发展了近百年,从最初的单纯用于搬运的工业机器人,到第二代具有视觉传感器以及信息处理技术的工业机器人,再到目前正在研究的"智能机器人",工业机器人的发展及应用日新月异。
二、工业机器人的应用场景在短短50多年的时间中,机器人技术得到了迅速的发展,在众多制造业领域中,工业机器人应用最广泛的领域是汽车及汽车零部件制造业,并且正在不断地向其他领域拓展,如机械加工行业、电子电气行业、橡胶及塑料工业、食品工业、木材与家具制造业等领域中。
在工业生产中,焊接机器人、磨抛加工机器人、焊接机器人、激光加工机器人、喷涂机器人、搬运机器人、真空机器人等工业机器人都已被大量采用。
1、抛磨加工机器人磨抛加工机器人主要应用于航空、航海、核电叶片磨抛,采用机器人持砂带在叶片表面磨抛,采用柔性接触、视觉定位的方式减小磨抛缺陷。
与人工磨抛相比,具有加工时间短,型面精度高,表面粗糙度小,加工一致性好的特点。
能适应大负载,恶劣的工作环境。
精度要求高。
2、焊接机器人弧焊机器人主要应用于各类汽车零部件的焊接生产,主要有熔化极焊接作业和非熔化极焊接作业两种类型。
在该领域,国际大型工业机器人生产企业主要以向成套装备供应商提供单元产品为主。
应用特点:要求快速平稳移动,定位精度要求较高。
3、激光加工机器人激光加工机器人是将机器人技术应用于激光加工中,通过高精度工业机器人实现更加柔性的激光加工作业。
3-工业机器人的发展史-国外工业机器人的发展史

国外工业机器人的发展史
• 80年代,通过传感器控制机器人 • 工业机器人进入普及时代。
直接驱动机器人手臂
国外工业机器人的发展史
• 第一台龙门式工业机器人
国外工业机器人的发展史
国外工业机器人的发展史
• 1987年,国际机器人 联合会成立。
• (International Federation of Robotics,IFR)
国外工业机器人的发展史
开放式控制系统(S4)
基于个人计算机的机器人控制系统
国外工业机器人的发展史
国外工业机器人的发展史
• 1999年,德国徕斯(Reis)机器人 公司在机器人手臂内引入集成激光束 指导系统。
• 该技术取代了需要外部的光束引导装 置,从而使机器人能够使用激光在高 动态工况下没有碰撞地完成操作。
被用于焊接和喷涂作业中。
国外工业机器人的发展史
• 斯坦福手臂:有6个自由度,全部电气化。
国外工业机器人的发展史
• 1969年,日本第一台工业机器人——Kawasaki-Unimate2000机器人
国外工业机器人的发展史
• 70年代随着计算机和工智能的发展,机器人进入实用化时代。 • 1970年在美国召开了第一届国际工业机器人学术会议。 • 1971年,日本机器人协会(Japanese Robot Association)成立,这是世界上第一
• 大规模的机器人产业形成
总结
1.了解国外工业机器人的发展史 2.掌握国外工业机器人发展史上的里程碑
国外工业机器人的发展史
• 2003年,德国库卡公司(KUKA)开发出第一台娱乐机器人Robocoaster。
国外工业机器人的发展史
• 2006年,意大利柯马公司(Comau)推出了第一款无线示教器(Wireless Teach Pendant,WiTP)。
国内外主要机器人企业名录
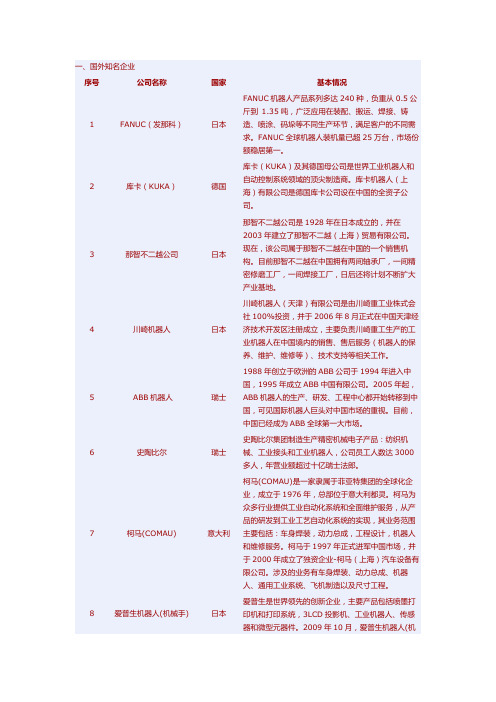
一、国外知名企业序号公司名称国家基本情况1FANUC(发那科)日本FANUC机器人产品系列多达240种,负重从0.5公斤到1.35吨,广泛应用在装配、搬运、焊接、铸造、喷涂、码垛等不同生产环节,满足客户的不同需求。
FANUC全球机器人装机量已超25万台,市场份额稳居第一。
2库卡(KUKA)德国库卡(KUKA)及其德国母公司是世界工业机器人和自动控制系统领域的顶尖制造商。
库卡机器人(上海)有限公司是德国库卡公司设在中国的全资子公司。
3那智不二越公司日本那智不二越公司是1928年在日本成立的,并在2003年建立了那智不二越(上海)贸易有限公司。
现在,该公司属于那智不二越在中国的一个销售机构。
目前那智不二越在中国拥有两间轴承厂,一间精密修磨工厂,一间焊接工厂,日后还将计划不断扩大产业基地。
4川崎机器人日本川崎机器人(天津)有限公司是由川崎重工业株式会社100%投资,并于2006年8月正式在中国天津经济技术开发区注册成立,主要负责川崎重工生产的工业机器人在中国境内的销售、售后服务(机器人的保养、维护、维修等)、技术支持等相关工作。
5 ABB机器人瑞士1988年创立于欧洲的ABB公司于1994年进入中国,1995年成立ABB中国有限公司。
2005年起,ABB机器人的生产、研发、工程中心都开始转移到中国,可见国际机器人巨头对中国市场的重视。
目前,中国已经成为ABB全球第一大市场。
6史陶比尔瑞士史陶比尔集团制造生产精密机械电子产品:纺织机械、工业接头和工业机器人,公司员工人数达3000多人,年营业额超过十亿瑞士法郎。
7柯马(COMAU)意大利柯马(COMAU)是一家隶属于菲亚特集团的全球化企业,成立于1976年,总部位于意大利都灵。
柯马为众多行业提供工业自动化系统和全面维护服务,从产品的研发到工业工艺自动化系统的实现,其业务范围主要包括:车身焊装,动力总成,工程设计,机器人和维修服务。
柯马于1997年正式进军中国市场,并于2000年成立了独资企业-柯马(上海)汽车设备有限公司。
柯马机器人教程

柯马配的总线接线方式有Profibus、DeviceNet以及以太网,三菱PLC使用的是IO通讯方式。
以下介绍IO的连接方式。
一、柯马机器人电源模块,12点输入模块,6点输出模块接线。
1.一个接线实例。
2.电源模块接法,一个+24V I/O接P0;GND接N0,其他的都不用接就可以了。
另机器人来的时候,柯马内部电源已经接好了,因为我们使用自己的电源,所以拆掉其自带的电源线即可。
3.12点输入模块接法。
12点输入,6点输出(GND不用接)如上图,按顺序接就可以了。
一个电源模块配2个输入模块,4个输出模块,提材料时需要特别注意。
二、安全信号接线使用柯马X30 插头(哈丁插头)原厂配件,不用提材料。
1.连接位置2.插头引脚图3.X30接线图外部急停使用6-13、7-14,短接4-11、5-12;门停止使用18-20、19-21,不使用就短接短接25-27、26-28以上6-13、7-14接在急停继电器的触点上即可,其余在X30插头上短接即可。
三、PLC选型柯马是源型(24+)输入、输出,对应的PLC就也应该是源型输入、输出;欧系的PLC非常方便,三菱的远程IO和FX3U等的输入一般是源漏公用的,也没有问题,但是三菱的远程IO源型输出模块订货困难,价格昂贵。
推荐使用FX3U的继电器型输出型(输入共用端S/S接N0,输出的公用端COM接P0)这样就可以了。
四、示教器IO设置接线完成之后,IO设置也是非常重要的,每一个模块、每一个点都是需要在示教器上配置正确的,否则无法使用!柯马叫IO MAP。
1.一位IO设置,也就是DIN、DOUT以下开机界面,MORE可以翻页,以下不赘述。
选择 SETUP选择Io-Map,等待一下。
选择 Device机架上挂载的设备可以自动识别。
其中SDM是柯马的安全P板,不用设置;后面PS2100是柯马的电源模块,不用设置;下面是两个12点的输入和4个6点输出模块,需要逐个设置。
从BC-129-DI9371-2开始,点击Modfy此页不用管,选择Next page光标移到2.1 DigitalInout01开始,点击MAP如上图设置,Index是IO开始的编号,Ports number数目设置12,全部设置成个位输出。
工业机器人操作与编程教材PPT

离线输入型 示教输入型 4、按应用领域分类
可分为搬运机器人、装配机器人、上下料机器人、焊接机 器人、码垛机器人、喷涂机器人等。
任务1 认识工业机器人 1.1.2 工业机器人的组成
工业机器人由本体、驱动系统和控制系统三个基本部分组成。 本体:即机座和执行机构,包括臂部、腕部和手部,有的机器人 还有行走机构; 驱动系统:包括动力装置和传动机构,用以使执行机构产生相应 的动作; 控制系统:是按照输入的程序对驱动系统和执行机构发出指令 信号,并进行控制。
任务3 机器人涂胶编程与操作 3.2.3 涂胶运动规划和示教前的准备 1、运动规划
机器人涂胶的动作,可分解成为“等待涂胶控制信号”“打开胶 枪”、“涂胶”、“关闭胶枪”等一系列子任务。可以进一步分解为“ 把胶枪移到第一条轨迹线上”、“胶枪移动到涂胶点”、“打开胶枪” 、“移动胶枪涂胶”等一系列动作。
任务2 搬运编程与操作 2.1 新建、编辑和加载程序 2.1.1 程序的基本信息 2.1.2 新建程序 2.1.3 打开、加载程序 2.1.4 程序编辑、修改 2.1.5 程序检编程与操作 2.1.1 程序的基本信息 1.常见的程序编制方法有两种,示教编程方法和离线编程方法。 (一)示教编程方法:是由操作人员引导,控制机器人运动,记 录机器人作业的程序点,并插入所需的机器人命令来完成程序的 编制; (二)离线示教:是操作者不对实际作业的机器人直接进行示教, 而是在离线编程中进行编程或在模拟环境中进行仿真,生成示教 数据,通过PC间接对机器人进行示教。
全国高等职业教育“十二五”规划教材 全国工业机器人技能培养系列精品教材
工业机器人操作与编程
(ISBN 978-7-121-28191-4)
中国工业机器人公司汇总

中国主要机器人公司汇总安川首钢机器人有限公司,其前身为首钢莫托曼机器人有限公司。
由中国首钢总公司和日本株式会社安川电机共同投资,是专业从事工业机器人及其自动化生产线设计、制造、安装、调试及销售的中日合资公司。
自1996年8月成立以来,始终致力于中国机器人应用技术产业的发展,其产品遍布汽车、摩托车、家电、IT、轻工、烟草、陶瓷、冶金、工程机械、矿山机械、物流、机车、液晶、环保等行业。
产品MOTOMAN-MS165&210 点焊机器人MOTOMAN-MH24 通用型机器人(用于搬运)MOTOMAN-MH2010 弧焊机器人、喷涂机器人、MOTOMAN-EPX系列喷涂机器人、MOTOMAN-EPH,EP系列使用压机间搬运机器人等机器人综合样本。
柯马(COMAU)是一家隶属于菲亚特集团的全球化企业,成立于1976年,总部位于意大利都灵。
柯马为众多行业提供工业自动化系统和全面维护服务,从产品的研发到工业工艺自动化系统的实现,其业务范围主要包括:车身焊装,动力总成,工程设计,机器人和维修服务。
Smart NJ4系列机器人库卡机器人作为机器人和自动化技术领域的先驱,是全球领先的工业机器人制造商。
库卡公司的工业机器人种类齐全、多种多样,几乎涵盖了所有负载范围和机器人类型。
适用于各种应用的兼容控制系统和软件包完善了库卡公司的产品系列。
库卡公司与系统合作伙伴的广泛网络共同提供量身定制的自动化解决方案,以满足所有客户的需要。
库卡产品几乎涵盖所有规格和负载范围的六轴机器人卸码垛机器人净室类型耐高温防尘机器人焊接机器人冲压连线机器人架装式机器人高精度机器人苏州绿的谐波传动科技有限公司,是一家从事精密谐波传动装置的研发、设计和生产的专业化公司。
我公司拥有一万平方米的标准厂房。
为了保证产品质量,主要生产、检验设备均采用目前世界一流的先进进口设备。
我公司的发展目标是要成为精密传动领域的技术领导者。
生产的谐波减速机,具有高可靠性、高精度、大扭矩、大速比、小体积等特性,广泛应用于航空航天、机器人、数控机床、半导体制造、精密机械驱动控制等领域,特别是在对减速机有高精度、低转速、大扭矩等特殊要求的工业机器人行业尽显技术优势。