K60(Rev6-Ch12-SIM)(Chinese)
K60(Rev6-Ch55-TSI)(中文)
第55 章触屏输入(Touch senseinput ,TSI)55.1 引言触摸感应输入(TSI)模块具有高灵敏和强鲁棒性的电容触摸感应检测能力。
通过独立的可编程的检测阈值和结果寄存器,TSI模块可以完成电容的测量。
TSI 模块在带有超低电流加法的低功耗模式下运行,能以一个触摸事件唤醒CPU。
它是一种稳定的电容测量模块,能够实现键盘触摸,旋转和滑动。
55.2 特点(1)具有多达16个输入的电容触摸感应式引脚和独立结果寄存器(2)具有可编程的阈值上下限,自动检测电极电容量的改变(3)在运行模式和低功耗模式下,自动周期扫描单元会有不同的占空比(4)为了实现键盘触摸,旋转,滑动,完全支持FSL触摸感应SW库(TTS)。
(5)运行在所有低功耗模式下:Wait, Stop, VLPR, VLPW, VLPS,LLS,VLLS{3,2,1}(6)能够从低功耗模式中唤醒MCU(7)配置中断:a.扫描结束中断或者超出范围中断b.TSI错误中断:电极板和VDD/VSS短路或者转换运行超时(8)补充温度和提供电压变化(9)在低功耗模式下,支持不需要外部晶体的操作,(10)每个电极电容量测量可以整合从1到4096次(11)可编程的电极振荡器和TSI参考振荡器可以实现模块灵敏度高,扫描时间短和功耗低的功能(12)在不需要外部硬件时,实现每个电极电容测量只需要使用一个引脚55.3 总述这部分是对TSI模块的总述。
下图给出了简化了的TSI模块结构图。
图55-1 触摸感觉输入结构图55.3.1 电极电容测量单元电极电容测量单元能感应一个TSI引脚的电容量变化和输出一个16位结果。
这个模块基于双振荡器架构。
其中一个振荡器和外部电极阵列连接,根据电极电容器震荡;而其他振荡器则根据内部参考电容器进行振荡。
在可配置的外部电极振荡器振荡期间,参考振荡器的周期计数值可以衡量引脚的电容量。
图55-2 TSI电容衡量单元结构图为了适应电极电容量的不同大小,电极振荡器使用一个可编程的电流源对引脚电容进行充电和放电,该电流源由SCANC[EXTCHRG]位进行选择。
飞思卡尔K60入门

一、飞思卡尔Kinetis功能特性
1、ARM发展史 2、ARMv7处理器分类 3、ARM Cortex-M4特性 4、飞思卡尔Kinetis家族介绍 5、K60内部资源介绍
山东大学 Kinetis培训
ARM发展史
ARM架构发展历程
山东大学 Kinetis培训
ARMv7处理器分类
ARMv7根据应用分类:
• 应用处理器(Cortex-A系列) Aplication Processor • 实时控制器(Cortex-R系列) Real-time Processor • 微控制器(Cortex-M系列) Micro Controller 山东大学 Kinetis培训
最快频率、最高性能、合理功耗 即
模拟比较器
开发环境
3通道
CW10.1、IAR、MDK
山东大学 Kinetis培训
软件应用
调试工具
开发环境
二、K60开发生态系统
其 他 支 持
山东大学 Kinetis培训
Kinetis开发环境
支持Kinetis开发的IDE(集成开发环境)目 前主要包括CodeWarrior10.1及以上版本, IAR6.1及以上版本和Keil MDK(即Keil for ARM)等。
山东大学 Kinetis培训
飞思卡尔Kinetis家族
Kinetis系列是由飞思卡尔推出的业界第一款基于ARM
Cortex-M4内核的混合信号微控制器,采用飞思卡尔创新的 90nm薄膜存储器(TFS)闪存技术,具有独特的Flex存储器
(可配置的内嵌 EEPROM)。
Kinetis 微控制器系列融合了最新的低功耗革新技术,具有 高性能、高精度的混合信号能力,宽广的互连性,人机接口和
K60 介绍 (中文)
第2章简介2.1 概要本章提供了Kinetis组合和K60系列产品的概述。
同时,本章提供了本文件所包涵设备的高水准的描述。
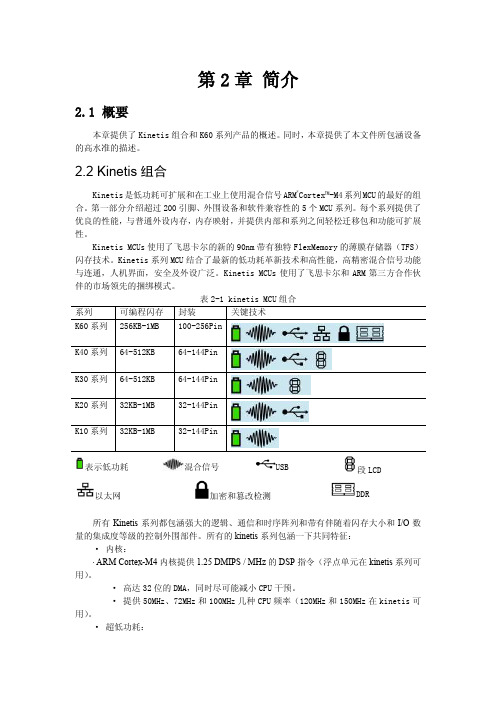
2.2 Kinetis组合Kinetis是低功耗可扩展和在工业上使用混合信号ARM®Cortex™-M4系列MCU的最好的组合。
第一部分介绍超过200引脚、外围设备和软件兼容性的5个MCU系列。
每个系列提供了优良的性能,与普通外设内存,内存映射,并提供内部和系列之间轻松迁移包和功能可扩展性。
Kinetis MCUs使用了飞思卡尔的新的90nm带有独特FlexMemory的薄膜存储器(TFS)闪存技术。
Kinetis系列MCU结合了最新的低功耗革新技术和高性能,高精密混合信号功能与连通,人机界面,安全及外设广泛。
Kinetis MCUs使用了飞思卡尔和ARM第三方合作伙伴的市场领先的捆绑模式。
表示低功耗混合信号USB 段LCD以太网加密和篡改检测DDR所有Kinetis系列都包涵强大的逻辑、通信和时序阵列和带有伴随着闪存大小和I/O数量的集成度等级的控制外围部件。
所有的kinetis系列包涵一下共同特征:· 内核:· ARM Cortex-M4内核提供1.25 DMIPS / MHz的DSP指令(浮点单元在kinetis系列可用)。
· 高达32位的DMA,同时尽可能减小CPU干预。
· 提供50MHz、72MHz和100MHz几种CPU频率(120MHz和150MHz在kinetis可用)。
· 超低功耗:· 10种低功耗操作模式通过优化外设执行和唤醒时间来延长电池寿命。
· 为了增加低功耗的灵活性,增加了低漏唤醒单元、低功耗定时器和低功耗RTC。
· 业界领先的快速换醒时间。
· 内存:· 从32 KB闪存/ 8 KB的RAM可扩展为1 MB闪存/128 KB的RAM。
同时使空白的独立闪存执行代码和固件更新。
K60各模块入门培训教程
北京理工大学智能车俱乐部程序培训K60各模块入门前言这个小文档是对k60单片机的各模块进行了初步的介绍,以便大家在之后车队的k60实际培训演示中能更好地理解,能更快的上手单片机,另外说一下车队用的K60单片机型号是MK60DN512ZVLL10,不同型号的k60单片机各模块基本操作有些小区别。
本文档是基于给大家实际演示的各模块功能来撰写的,里面讲的各个模块在以后的做车过程中基本上都会用到。
实际上一个智能车上所实现的功能都是由这些最基本的小模块组合而成的,把这些小模块各个击破了,都理解了,以后看智能车的整体程序也就容易得多了~另外注意:在我没实际操作讲解之前,大家看这些模块的时候可以不用纠结一些细节的问题,大致有个概念即可~在我讲的时候好好听我讲各个模块的例程,做好笔记,然后看实验现象,进行进一步的理解。
之后自己再回去仔细看例程、笔记和这个文档,并且自己可以对程序进行一些改动,然后烧写程序看现象仔细研究。
PS:我们第十届包括之前的学长们都没有进行这样专门的比较系统的单片机各模块的培训,也没有学长们亲自给我们写这些入门的学习文档,基本都是自己去查资料学习,所以你们这一届算是很走运的了!不要错失良机不好好学习哦~话说回来,毕竟车队是一年比一年进步嘛,培训会慢慢地变得更加有条理!还有你们明年培训下一届的时候也是哦学完了单片机各个模块后,以后你们要是想对车进行哪个模块的调试不会出现不知道程序在哪、不知道怎样去调试这些最基本、较Low的问题~你们对各个模块理解透了,智能车整体的程序架构你们会轻而易举的掌握。
以后想调那个模块调哪个,整个程序也不会乱,以后要在车上增加新模块新功能也会容易得多!所以......仓鼠们打起精神~好好学吧!!!第十届摄像头游清目录一、GPIO模块 (5)1、GPIO概述 (5)2、I/O口的使用方法 (6)二、FTM占空比(PWM)模块 (9)1、PWM概述 (9)2、PWM程序讲解 (10)三、中断模块 (13)1、中断概述 (13)2、GPIO(I/O)口外部中断 (13)2.1I/O口外部中断概述 (13)2.2I/O口外部中断程序讲解 (14)3、PIT定时器中断 (16)3.1PIT定时器中断概述 (16)3.2PIT定时器中断程序讲解 (16)四、A/D(模数)转换模块 (18)1、A/D模块概述 (18)2、A/D模块程序讲解 (19)五、串口通信(UART)模块 (21)1、串口(UART)模块概述 (21)1、串口(UART)模块程序讲解 (22)后记 (25)一、GPIO模块车队用的K60单片机有100个引脚,如下图:其中大部分引脚有GPIO模块的功能,GPIO模块可以输出指定的高低电平,或读入输入电平,在实际智能车上可以用于调试用的小灯、蜂鸣器、拨码开关和摄像头信号数据采集及外部中断等。
K60各模块入门培训教程
K60各模块入门培训教程K60是一款ARM Cortex-M4内核的微控制器系列,由恩智浦半导体(NXP)公司推出。
K60系列微控制器具有高性能、低功耗、丰富的外设和丰富的开发工具支持等特点,适用于各种应用场景。
本教程将重点介绍K60微控制器的各个模块,包括GPIO(通用输入输出)、UART(串口通信)、SPI(串行外设接口)、I2C(串行接口)、ADC(模拟数字转换器)、PWM(脉冲宽度调制)等。
每个模块都将详细介绍其功能和使用方法。
一、GPIO模块GPIO模块是K60微控制器的通用输入输出模块,用于控制外部硬件设备。
K60系列微控制器通常具有多个GPIO引脚,可以配置为输入或输出。
在本教程中,我们将介绍如何配置GPIO引脚的方向(输入或输出)、读取输入引脚的状态和设置输出引脚的状态等。
二、UART模块UART模块是K60微控制器的串口通信模块,用于与外部设备进行异步通信。
K60系列微控制器通常具有多个UART模块,每个UART模块都包含发送和接收功能。
在本教程中,我们将介绍如何配置UART模块的波特率、数据位、停止位和校验位等,并编写代码实现通过UART与外部设备进行通信。
三、SPI模块SPI模块是K60微控制器的串行外设接口模块,用于与外部设备进行全双工的串行通信。
K60系列微控制器通常具有多个SPI模块,每个SPI模块都包含主机和从机模式。
在本教程中,我们将介绍如何配置SPI模块的工作模式(主机或从机)、时钟极性和相位等,并编写代码实现通过SPI与外部设备进行通信。
四、I2C模块I2C模块是K60微控制器的串行接口模块,用于与外部设备进行双向的串行通信。
K60系列微控制器通常具有多个I2C模块,每个I2C模块都可以配置为主机或从机。
在本教程中,我们将介绍如何配置I2C模块的工作模式(主机或从机)、时钟频率和从机地址等,并编写代码实现通过I2C与外部设备进行通信。
五、ADC模块ADC模块是K60微控制器的模拟数字转换模块,用于将模拟信号转换为数字信号。
K60功能介绍
一、超低功耗:1. 10 种带有功率和时脉闸控的低功耗模式,可优化外围设备活动和恢复时间。
停止电流<500 nA,运行电流<200 uA/MHz,停止模式唤醒时间4μs。
2. 完整内存,模拟运行可降至1.71V,令电池寿命延长。
3. 低漏电唤醒单元,可带有8 个内置模块和16 个引脚,作为低漏电停止(LLS)/超低漏电停止(VLLS) 模式的唤醒源。
4. 低功耗定时器支持在低功耗状态下系统的持续运行。
二、闪存、SRAM和FlexMemory5. 256 KB-1 MB闪存。
快速接入、高可靠性具备四级安全保护6. 64 KB-128 KB SRAM7. FlexMemory:32 字节- 16 KB 用户可分段的字节写入/清除EEPROM,适用于数据表/系统数据。
EEPROM 具有超过10M 的周期和70 μsec 写入时间的闪存(出现电力故障时不会发生数据丢失或损坏)。
没有用户或系统干预便可完成编程和清除功能,完全运行状态下可降至 1.71V。
此外,从256KB-512KB 的FlexNVM 还适用于额外编程代码、数据或EEPROM 备份三、混合信号功能:8. 多达四种可配置分辨率的高速16位ADC。
可采用单路或差分输出模式改善噪声抑制。
可编程延迟块触发功能转换时间可达500 ns9. 多达两个12位DAC可用于音频应用模拟波形生成10. 具有3 个高速比较器,通过将PWM 保持在安全状态,提供快速准确的电机过电流保护。
11. 多达四个64倍可编程增益放大器用于小型振幅信号转换12. 模拟基准电压为模拟块、ADC 和DAC 提供精确的基准值,可以替换外部基准电压,降低系统成本。
四、性能:13. ARM Cortex-M4 内核+ DSP。
100-180MHz、单周期MAC、单指令多数据(SIMD) 扩展、可选的单精度浮点单元。
14. 具有32 通道的DMA 适用于外围设备和内存,可降低CPU 负载,实现更快的系统吞吐量。
K60系统时钟模块

14.2 电源管理模块
电源模式组成
电源管理控制器为用户提供了多达10种电源模式。分别是: RUN、WAIT、VLPR、VLPW STOP、VLPS、LLS、VLLS3、VLLS2、 VLLS1。
电源模式功能 • 1 电源模式切换
任意时刻的芯片复位都会使芯片转到正常的运行状态。 在运行、等待和停止模式的不同转换过程中,必须开启电 源调节器的功能。
系统时钟功能(续)
SIM模块能对系统的各种时钟进行配置,它的SCGCx寄 存器可以对每个模块的时钟进行单独的开启和关闭,该寄 存器在复位时被清零,从而使得相应模块的时钟被关闭。
14.1 时钟系统
时钟系统的框图
14.1 时钟系统
时钟设置方法 对时钟的设置,必须满足一定的要求。 1)内核和系统时钟频率必须在 100MHz以内。 2)总线时钟频率不大于50MHz,且必 须是内核时钟的整数分频。 3)Flash模块时钟频率不大于25MHz, 且必须是总线时钟的整数分频。 4)FlexBus时钟频率不大于总线时钟。
14.3 端口控制与中断模块
端口控制与中断模块简述
端口控制与中断模块支持外部中断、数字滤波和端口 控制等功能。
端口控制
若启动端口功能,端口的数字滤波器功能在所有数字 引脚复用功能有效。 对于32位的端口的每个引脚都可以独立地配置其功能。 同一端口的所有数字滤波器以时钟为单位的滤波带宽 相同, 只有当这个端口的数字滤波器功能被禁用时才能 更改带宽值。
14.4 看门狗
计算机正常运行(COP)看门狗
当应用软件与期望的运行不相符时,COP看门 狗试图强制系统复位。 任何复位之后,COP计数器都会被激活。 服务于(清除)COP计数器的写SRS操作不应 被放置在中断服务例程(ISR)中,因为即使主要 的应用程序失败,ISR也可能继续被周期地执行。 当MCU在激活后台模式,COP计时器暂时停用。
飞思卡尔K60入门资料课件

将JTAG调试器连接到计算 机,并下载和安装相应的 驱动程序。
打开Keil MDK-ARM软件 ,创建一个新项目,选择 正确的芯片型号(K60), 并配置项目属性,如工作 空间、工具链等。
使用串口通信线将开发板 与计算机连接起来,以便 在开发过程中进行调试和 数据传输。
使用Keil MDK-ARM软件 编写代码,并进行编译和 调试。
K60在图像处理中的应用
K60芯片具有高速的图像处理能力,可以用于实现各种图像处理算 法,如图像增强、目标检测、人脸识别等。
图像处理实例代码
提供一些基于K60芯片的图像处理实例代码,包括图像增强、目标 检测等。
通信系统实例
通信系统概述
通信系统是实现信息传输和交换的技术体系,包括无线通信、有 线通信、卫星通信等。
软件问题及解决方案
总结词
软件问题通常涉及到编程环境、编译错误、烧录程序等,需要检查软 件配置和代码错误。
编程环境配置
确保你使用的编程环境(如IAR Embedded Workbench、Keil uVision等)已正确配置,包括驱动程序安装、工具链设置等。
编译错误
检查代码是否有语法错误或逻辑错误,仔细阅读编译器给出的错误提 示,定位并修复问题。
K60在通信系统中的应用
K60芯片具有高速的通信接口和强大的数据处理能力,可以用于实 现各种通信系统,如无线通信网络、卫星通信系统等。
通信系统实例代码
提供一些基于K60芯片的通信系统实例代码,包括无线通信网络协 议栈的实现、卫星通信系统的数据处理等。
05
K60芯片常见问题及解决方案
硬件问题及解决方案
开发环境常见问题及解决方案
1. Keil MDK-ARM软件安装问题:确保从官方网 站下载正确的版本,并按照安装向导进行操作。 如果遇到问题,可以查阅Keil官方文档或寻求技 术支持。
K60(Rev6-Ch25-OSC)(中文)
第25章振荡器(Oscillator,OSC)25.1 概述OSC模块是一个晶体振荡器,此模块同一个外部石英晶体或谐振器相连,为MCU产生一个参考时钟。
注意:关于此模块的特定芯片实现实例详情请参见芯片配置章节。
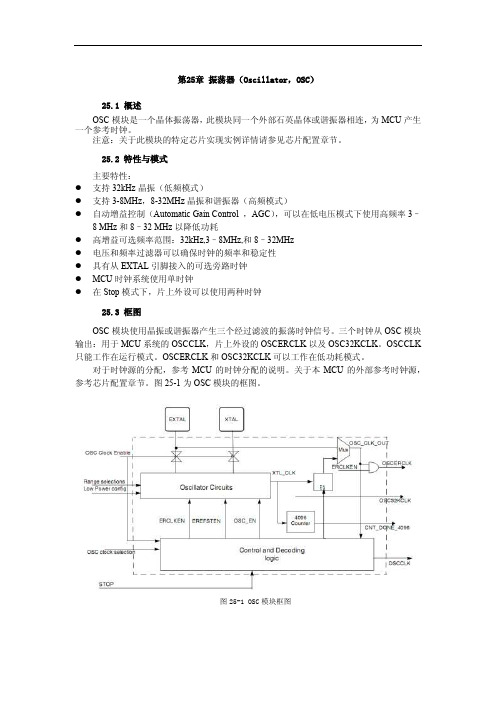
25.2 特性与模式主要特性:●支持32kHz晶振(低频模式)●支持3-8MHz,8-32MHz晶振和谐振器(高频模式)●自动增益控制(Automatic Gain Control ,AGC),可以在低电压模式下使用高频率3–8 MHz和8–32 MHz以降低功耗●高增益可选频率范围:32kHz,3–8MHz,和8–32MHz●电压和频率过滤器可以确保时钟的频率和稳定性●具有从EXTAL引脚接入的可选旁路时钟●MCU时钟系统使用单时钟●在Stop模式下,片上外设可以使用两种时钟25.3 框图OSC模块使用晶振或谐振器产生三个经过滤波的振荡时钟信号。
三个时钟从OSC模块输出:用于MCU系统的OSCCLK,片上外设的OSCERCLK以及OSC32KCLK。
OSCCLK 只能工作在运行模式。
OSCERCLK和OSC32KCLK可以工作在低功耗模式。
对于时钟源的分配,参考MCU的时钟分配的说明。
关于本MCU的外部参考时钟源,参考芯片配置章节。
图25-1为OSC模块的框图。
图25-1 OSC模块框图25.4 OSC信号说明25.5 外部晶振/谐振器连接晶振/谐振器频率的引用连接如表25-2所示。
当使用低频率,低功耗模式时,唯一的外部部件就是晶振或陶瓷谐振器本身。
在其它振荡器模式中还需要负载电容(Cx,Cy)和反25.6 外部时钟连接在外部时钟模式,引脚连接如图25-6所示。
注意:当GPIO替换功能配置成外部时钟连接时,XTAL可以用作GPIO。
25.7 存储器映射/寄存器定义一些振荡器模块寄存器位通常被复用到其他模块中,例如MCG或SIM。
25.7.1 OSC Control Register (OSC_CR)注意:在OSC被使能并且开始产生时钟之后,其它配置如低功耗和频率范围就不能被修改了。
K60(Rev6-Ch24-MCG)(中文)

第24章多用途时钟信号生成器(MCG)24.1 介绍多用途多用途时钟信号生成器(MCG)模块为MCU提供多种时钟源选项。
这个模块由一个频率环锁(FLL)和一个相位环锁(PLL)组成。
FLL可由一个内部或外部参考时钟控制,而PLL可由一个外部参考时钟控制。
这个模块要么在FLL或PLL输出时钟之间,要么在内部参考时钟或外部参考时钟之间选择一个时钟源以作为MCU系统时钟。
MCG操作与晶体振荡器有关,其中晶体振荡器允许一个外部晶体、陶瓷共振器或外部时钟源产生外部参考时钟。
24.1.1 特性MCG模块的关键特性:◆频率环锁(FLL)。
●数控石晶(DCO)。
●DCO可设置时钟范围有四个。
●低频率外部参考时钟源的编程选项和最大DCO输出频率。
●内外参考时钟可以作为FLL源。
●可以作为其他片上外设的时钟源。
◆相位环锁(PLL)●电压控制振荡器(VCO)●外部参考时钟作为PLL时钟源。
●VCO频分模块。
●相位/频率检测器。
●集成环过滤器。
●可以作为其他片上外设的时钟源。
◆内参考时钟生成器●9个微调位的精确慢时钟●4个微调位的快时钟●可以被用作FLL的时钟源。
在FEI模式下,只有慢内参考时钟(IRC)可以被用作FLL源。
●无论是快时钟还是慢时钟都不能用作MCU的时钟源●可以作为其他片上外设的时钟源。
◆低功耗的石晶时钟发生器位MCG外部参考提供控制信号:●HGO,RANGE,EREFS◆从晶振获得外部时钟●可被用作FLL或PLL的时钟源●可被用作MCU的时钟源◆从RTC获得外部时钟●只能作为FLL的时钟源●只能选择MCU的时钟源◆带有重置请求能力的外部时钟监视器,可以在FBE,PEE,BLPE或者FEE模式下对外部时钟进行监测◆在PLL中使用的有中断请求能力的锁检测器◆外时钟参考的内参考时钟自动裁切功能(ATM)。
◆FLL和PLL的参考分频。
◆为其他片上设备提供时钟源的MCG PLL 时钟(MCGPLLCLK)◆为其他片上设备提供时钟源的MCG FLL时钟(MCGPLLCLK)◆为其他片上设备提供时钟源的MCG Fixed Frequency时钟(MCGPLLCLK)◆为其他片上设备提供时钟源的MCG 内参考时钟(MCGPLLCLK)图24-1 多用途时钟生成器(MCG)框图24.1.2 运行模式MCG共有九中运行模式:FEI,FEE,FBI,FBE,PEE,BLPI,BLPE,和终止模式。
k60

• • • • •
通用寄存器R0~R12 堆栈指针R13 连接寄存器R14(LR) 程序计数寄存器R15 特殊功能寄存器(程序状态字、中断、控 制)
• 串行外设接口(SPI,Serial Peripheral Interface) 是Freescale公司推出的一种同步串行通讯接口, 用于微处理器和外围扩展芯片之间的串行连接。 SPI全双工主--从连接,四线同步传输。从机,主 机(串行时钟)。主入从出 ,主出从如。低功耗 模式。选择从机:主机将该从机的选择线拉低。 • I2C:在硬件上,二线制的I2C串行总线使得各IC 只需最简单的连接,而且总线接口都集成在IC中, 不需另加总线接口电路。支持多主控。主机提供 时钟信号,每个设备有独立地址。采用了独特的 寻址约定,规定了起始信号后的第一个字节为寻 址字节,用来寻址被控器件,并规定数据传送方 向。半双工。
• 控制器局域网CAN(Controller Area Network):CAN网络上的任何一个节点均 可作为主节点主动地与其他节点交换数据; CAN网络节点的信息帧可以分出优先级, 这为有实时性要求的控制提供了方便; CAN的物理层及数据链路层有独特的设计 技术,使其在抗干扰以及错误检测等方面 的性能大大提高。
K60可选择的芯片类型
芯片类型 CPU频 率 (MHz) 100 100 100 100 100 100 引脚 数 封装 Flash容 量(KB) 程序空间 (KB) EEPRO M(KB) SRAM(K B) GPIO
MK60N256VLQ100 MK60X256VLQ100 MK60N512VLQ100 MK60N256VMD100 MK60X256VMD100 MK60N512VMD100
144 144 144 144 144 144
K60(Rev6-Ch55-TSI)(中文)
第55 章触屏输入(Touch sense input ,TSI)55.1 引言触摸感应输入(TSI)模块用高灵敏和增强的鲁棒性提供触摸感觉检测的能力。
每个TSI 引脚实现一个带有个别可编程检测槽电极性能力的措施和结果寄存器。
TSI模块在当前额外低加法器和以一种触摸事件唤醒CPU的条件下能够作用于若干个低电源模块。
它为触摸键盘,旋转式机器,滑块提供一种稳定有能力的措施。
55.2 特点(1)支持和带有结果寄存器一样多的16个输入电容性触摸感觉式的引脚(2)自动检测带有可编程的低和高开端的电极性电容量的改变(3)为运行和低电源模块,自动周期扫描不同占空因数周期单元(4)完全支持为实现触摸键盘,旋转式机器,滑块,带有FSL触摸感应SW库(TTS)。
(5)运行在所有低电源模块:Wait,Stop, VLPR, VLPW, VLPS,LLS,VLLS{3,2,1}(6)有从低电源模块中唤醒MCU的能力(7)配置中断:a.结尾扫描或者超出范围中断b.TSI错误中断:对VDD/VSS的短暂停留或者超出转换范围(8)补充温度和补充电压变化(9)支持甚至在低电压模式下不需要外部晶体的操作(10)从1到4096次每个电极性能量量度的配置的整合(11)对于高灵敏的可编程的电极性振荡器和TSI索引振荡器,小的扫描时间和低电源功能(12)在没有外部硬件需要时仅在每个电极性实现时使用一个引脚55.3 总述这部分展现了TSI模块的总体描述。
以下的图展现简化了的TSI模块时序图。
图55-1 触摸感觉输入时序图55.3.1 电极性电容量量度单元电极性电容量量度单元能感觉一个TSI引脚的电容量和一个16位结果输出。
这个模块基于两体振荡器的结构。
一个振荡器和外部电容性阵列连接,根据电极性电容震荡,其他根据内部参考电容震荡。
在有许多可配置的外部电极性振荡器振荡期间,参考振荡器的计数时间用来衡量引脚的电容量。
为了适应电极性电容量不同的大小,电极性振荡器用一个可编程的5位二进制的当前源来对引脚电容进行充电和放电。
K60固件库
-1文件版本:V2.4
超核电子
中国石油大学(华东)
(如有不详之处请参考源文件代码)
目
目 1.
录
KinetisK 系列固件库户手册................................................................................................. - 1 录..................................................................................................................................- 2 文档和库规范.................................................................................................................. 10 1.1 缩写................................................................................................................................ 10 1.2 命名规则........................................................................................................................ 10 1.3 编码规则........................................................................................................................ 11 1.3.1 变量......................................................................................................................... 11 1.3.2 布尔型..................................................................................................................... 11 1.3.3 功能状态类型........................................................................................................ 12 2. 固件函数库......................................................................................................................... 12 2.1 压缩包描述.................................................................................................................... 12 2.1.1 文件夹 FWLIB..........................................................................................................12 2.1.2 文件夹 HARDWARE................................................................................................ 12 2.1.3 文件夹 STARTUP..................................................................................................... 12 2.1.4 文件夹 USER........................................................................................................... 13 2.2 外设的初始化和设置................................................................................................... 13 2.3 位段(Bit-Banding).................................................................................................... 14 2.3.1 映射公式................................................................................................................ 14 2.3.2 应用实例................................................................................................................ 14 2.4 运行时间检测............................................................................................................... 15 3. 外设固件概述..................................................................................................................... 17 4. 通用输入输出模块(GPIO).............................................................................................. - 18 4.1 GPIO 模块主要寄存器结构...................................................................................... - 18 4.2 GPIO 库函数.............................................................................................................. - 18 4.2.1 GPIO_Init............................................................................................................. - 18 4.2.2 GPIO_WriteBit..................................................................................................... - 20 -
K60(Rev6-Ch04-Memory Map)(中文)

1. EzPort主机端口和DMA主机端口复用。
到AIPS-Lite外设桥和GPIO模块地址空间限制的访问权限受限于内核、DMA和EzPort。
2. ARM Conrtex-M4内核访问也包含调试接口。
4.2.1位带别名区
SRAM_U,AIPS-Lite和GPIO模块资源依附于Cortex-M4内核位带别名区。
处理器包含两个32MB位带别名区,与两个1MB的位带别名区相连。
每个32位的32MB空间有自己独立的位带别名区。
在混合区的32位写操作和位宽区的读写操作一样。
写到位带别名区的值的第0位有如下作用:
·写1到第0位是用于置位。
·写0到第0位是用于清零。
从混合区读数据:
·0x0000_0000是清零。
·0x0000_0001是置位。
图4-1 混合位宽映射
4.3 Flash存储映射
各种Flash存储和Flash寄存器位于不同的基址。
如下图所示。
图4-2 只包含可编程flash 存储映射
图4-3 包含FlexNVM 的存储映射
4.3.1 交替非易失性IRC 用户修剪说明
为防止自定义IRC 用户通过一些开发工具裁剪,系统保留了由以下非易失性位(4字节)。
在该位上可以储存工厂裁剪的交替IRC 裁剪信息。
如果想要覆盖出厂值,用户的软件必须加载新的值到MCG 裁剪寄存器。
4.4 SRAM 存储映射
片上RAM 分为SRAM_L 和SRAM_U 。
同时SRAM_L 和SRAM_U
是连续。
飞思卡尔K60入门课件

K60芯片内置硬件浮点单元,支持浮点运算 和数字信号处理。
外设接口丰富
可扩展性
K60芯片集成了多种外设接口,如UART、 SPI、I2C等,方便开发者进行硬件连接和 通信。
K60芯片支持多种外设扩展,可以根据不同 的应用需求进行功能扩展。
02 K60开发环境搭建
开发环境概述
嵌入式系统开发环境
用于编写、编译、调试嵌入式系统程序的环境。
飞思卡尔官方网站和开发者社区提供了丰富的教程资源,从入门到进阶,涵盖 了K60微控制器的各种应用场景和开发技巧。
参与开源项目
开源项目
参与开源项目是学习K60的一种有效 方式,可以了解其他开发者是如何使 用K60进行开发的,并从中获取灵感 和学习经验。
贡献社区
通过参与开源项目,不仅可以学习到 其他人的开发经验,还可以将自己的 经验和技巧分享给社区,与其他开发 者共同进步。
电平;在读操作时,可以读取引脚的电平状态。
中断编程
中断概述
中断是一种常见的硬件机制,用于处理紧急事件或异常情况。在微控制器中,中断可以由 外部事件或内部事件触发,打断当前正在执行的程序,转而执行相应的中断处理程序。
中断配置
配置中断的触发方式、优先级和中断处理程序。在飞思卡尔K60微控制器中,可以通过编 程配置中断的属性。
连接调试接口
将调试器正确连接到K60开发板的调试接口上, 确保物理连接稳定。
ABCD
驱动安装
根据调试器型号,安装相应的驱动程序,以便于 与开发环境进行通信。
配置调试参数
在开发环境或调试软件中设置调试参数,如波特 率、数据位、停止位等,确保通信正常。
系统烧写
准备烧写文件
根据K60的硬件配置和开发 需求,准备相应的系统烧写
K60(Rev6-Ch53-I2S)(中文)
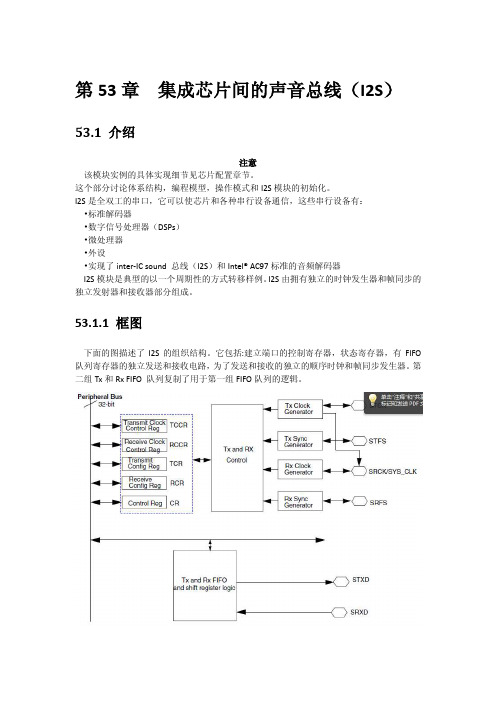
下面的图描述了 I2S 的组织结构。它包括:建立端口的控制寄存器,状态寄存器,有 FIFO 队列寄存器的独立发送和接收电路,为了发送和接收的独立的顺序时钟和帧同步发生器。第 二组 Tx 和 Rx FIFO 队列复制了用于第一组 FIFO 队列的逻辑。
图 53-1 面向用户的 I2S 框图
列可以用于网络模式从而为发送和接收提供两个独立的通道 •可编程数据接口模式,例如 I2S, lsb- and msb-aligned •可编程单词长度(8, 10, 12, 16, 18, 20, 22 or 24 位) •用于帧同步和时钟发生器的编程选项 •可编程的 I2S 模式(主,从,正常) •在 I2S 的主模式下过采样时钟作为 SRCK 的输出 •AC97 支持 •用于发送和接收部分的完全独立的时钟和帧同步选择。在 AC97 标准中时钟来自外部
53.1.2 特性
I2S 包含以下特性: •有独立或共享的内/外部时钟和帧同步的独立(异步)或共享(同步)的发送和接收部
分,在主或从模式下工作。 •使用帧同步的正常操作模式 •允许多个设备共享端口多大三十二个时段的网络操作模式 •无需同步帧的门控时钟操作模式 •两组 FIFO 发送和接收队列。四组 FIFO 队列中每组都是 15x32 位。两组 Tx/Rx FIFO 队
寄存器位的详细信息和字段功能以位顺序紧跟寄存器图表。
I2S 内存映射
绝 对 地 址 寄存器名
宽 度 访 问 复位值
段/页
(hex)
(位) 权限
4002_F000 I2S 发送数据寄存器 0(I2S0_TX0) 32
R/W 0000_0000h 53.3.1/
1693
4002_F004 I2S 发送数据寄存器 1(I2S0_TX1) 32
K60(Rev6-Ch42-CMT)(中文)
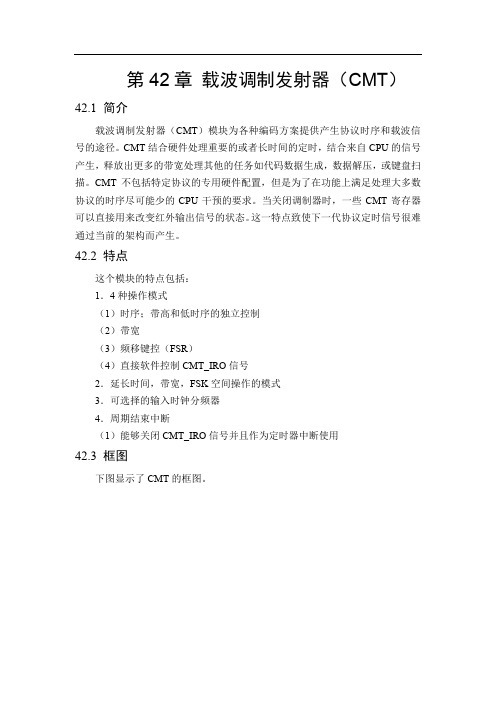
第42章载波调制发射器(CMT)42.1 简介载波调制发射器(CMT)模块为各种编码方案提供产生协议时序和载波信号的途径。
CMT结合硬件处理重要的或者长时间的定时,结合来自CPU的信号产生,释放出更多的带宽处理其他的任务如代码数据生成,数据解压,或键盘扫描。
CMT不包括特定协议的专用硬件配置,但是为了在功能上满足处理大多数协议的时序尽可能少的CPU干预的要求。
当关闭调制器时,一些CMT寄存器可以直接用来改变红外输出信号的状态。
这一特点致使下一代协议定时信号很难通过当前的架构而产生。
42.2 特点这个模块的特点包括:1.4种操作模式(1)时序;带高和低时序的独立控制(2)带宽(3)频移键控(FSR)(4)直接软件控制CMT_IRO信号2.延长时间,带宽,FSK空间操作的模式3.可选择的输入时钟分频器4.周期结束中断(1)能够关闭CMT_IRO信号并且作为定时器中断使用42.3 框图下图显示了CMT的框图。
图42-1 CMT模块框图42.4 操作模式CMT模块在以下模式中运行。
时间—当在时间模式中运行时,用户独立的定义高低载波信号时序来决定周期和占空比。
基带—当MSC[BASE]位被置位时,对该模块的载波输出(fcg)被一直拉高为了允许基带协议的产生。
频移键控(FSR)--这种模式允许载波产生器在高低时序2个置位之间更改。
当运行在FSK模式中,发生器将会在两个置位间切换当被模块指示允许用户动态的在2个载波频率间切换而不需要CPU干预。
CMT模式的概要列于表42-1表42-1 CMT操作模式1.为了防止虚假操作,在开始传输之前初始化所有的数据和控制寄存器(MSC[MCGEN=1)。
2.这些位不是双缓冲的,在传输时不能更改(在MSC[MCGEN]=1时)。
注意模块的方式到核心模式的任务是芯片特定的。
对于模块到内核模式的任务,请参阅本章介绍如何配置模块。
42.4.1 等待模式操作在等待模式中,如果CMT使能,将会继续正常运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12 芯片配置模块
12.1 简介
注意:具体芯片有关该模块的具体实现细节请参考芯片配置章节有关内容。
系统集成模块(SIM)包括系统控制及系统配置寄存器。
12.1.1 特性
1)系统时钟的配置
(1)为SDHC、IIS、以太网时间戳、USB以及PLL/FLL等提供时钟源选择;
(2)系统时钟分频值;
(3)IIS和USB时钟分频值
2)架构的时钟门控制
3)Flash配置;
4)USB基准配置;
5)RAM大小配置;
6)可变化的外部时钟和错误时钟源选择;
7)UART0和UART1收/发源的选择/配置;
8)复位引脚滤波。
12.1.2 工作模式
(1)运行模式(2)休眠模式(3)深度休眠模式(4)VLLS模式
12.1.3 SIM引脚说明
12.2 存储器映射及寄存器定义
SIM模块包含很多位域用于为不同模块时钟选择时钟源和分频。
包括时钟框图和时钟定义的详细信息参见时钟分配(Clock Distribution)一章。
注意:SIM_SOPT1寄存器同其他SIM寄存器有不同的基址。
SIM存储器映射:
12.2.1 系统选项寄存器1(SIM_SOPT1)
SOPT1寄存器的复位值为如下:从POR和LVD退出:USBREGEN被置1,USBSTBY 被清0,OSC32KSEL被清0。
从VLLS或其它系统复位退出:USBREGEN,USBSTBY和OSC32KSEL不受影响。
地址:SIM_SOPT1-4004_7000h 基址+0h偏移量=4004_7000h
说明x表示在复位时未定义
12.2.2 系统选项寄存器2(SIM_SOPT2)
SOPT2包含选择本设备上多个模块时钟源选项的控制。
包括框图及设备时钟定义的详细信息参见Clock Distribution一章。
地址:SIM_SOPT2 –4004_7000h 基址+ 1004h 偏移量= 4004_8004h
12.2.3 系统选项寄存器4(SIM_SOPT4)
地址:SIM_SOPT4 –4004_7000h 基址+ 100Ch 偏移量= 4004_800Ch
12.2.4 系统选项寄存器5(SIM_SOPT4)
地址:SIM_SOPT5 –4004_7000h 基址+ 1010h 偏移量= 4004_8010h
12.2.5系统选项寄存器6(SIM_SOPT6)
注意:RSTFLTEN和RSTFLTSEL的复位只有在上电复位时有效,其它的复位对它们没有影响。
地址:SIM_SOPT6 –4004_7000h 基址+ 1014h 偏移量= 4004_8014h
12.2.6 系统选项寄存器7(SIM_SOPT7)
地址:SIM_SOPT7 –4004_7000h 基址+ 1018h 偏移量= 4004_8018h
12.2.7 系统设备标识寄存器(SIM_SDID)
地址:SIM_SDID –4004_7000h 基址+ 1024h 偏移量= 4004_8024h。
说明:x表示在复位时未定义。
12.2.8 系统时钟门控寄存器1(SIM_SCGC1)
地址:SIM_SCGC1 –4004_7000h 基址+ 1028h 偏移量= 4004_8028h
12.2.9 系统时钟门控寄存器2(SIM_SCGC2)
12.2.10 系统时钟门控寄存器3(SIM_SCGC3)
地址:SIM_SCGC3 –4004_7000h 基址+ 1030h 偏移量= 4004_8030h
12.2.11 系统时钟门控寄存器4(SIM_SCGC4)
地址:SIM_SCGC4 –4004_7000h 基址+ 1034h 便宜量= 4004_8034h
12.2.12系统时钟门控寄存器5(SIM_SCGC5)
12.2.13 系统时钟门控寄存器6(SIM_SCGC6)
地址:SIM_SCGC6 –4004_7000h 基址+ 103Ch 偏移量= 4004_803Ch
12.2.15系统时钟门控寄存器7(SIM_SCGC7)
地址:SIM_SCGC7 –4004_7000h 基址+ 1040h 偏移量= 4004_8040h
12.2.16 系统时钟分频寄存器1(SIM_CLKDIV1)
注意:当设备在VLPR模式时CLKDIV1寄存器不可写。
地址:SIM_CLKDIV1 –4004_7000h 基址+ 1044h 偏移量= 4004_8044h
12.2.17 系统时钟分频寄存器2(SIM_CLKDIV2)
地址:SIM_CLKDIV2 –4004_7000h 基址+ 1048h 偏移量= 4004_8048h
12.2.18 Flash配置寄存器1(SIM_FCFG1)
注意:EESIZE 和DEPART的复位值基于用户视同IFR通过PGMPART flash命令进行编程。
EESIZE 和DEPART段未作应用。
地址:SIM_FCFG1 –4004_7000h 基址+ 104Ch 偏移量= 4004_804Ch
12.2.19 Flash配置寄存器2(SIM_FCFG2)
地址:SIM_FCFG2 –4004_7000h 基址+ 1050h 偏移量= 4004_8050h
12.2.20 唯一标识寄存器高(SIM_UIDH)
地址:SIM_UIDH –4004_7000h 基址+ 1054h 偏移量= 4004_8054h
12.2.21唯一标识寄存器中-高(SIM_UIDMH)
地址:SIM_UIDMH –4004_7000h 基址+ 1058h 偏移量= 4004_8058h
12.2.22 唯一标识寄存器中-低(SIM_UIDML)
地址:SIM_UIDML –4004_7000h 基址+ 105Ch 偏移量= 4004_805Ch
12.2.23 唯一标识寄存器低(SIM_UIDL)
地址:SIM_UIDL –4004_7000h 基址+ 1060h 偏移量= 4004_8060h。