西门子定位器调试 PPT
多图详解西门子阀门定位器调试

多图详解西门子阀门定位器调试(1)工作方式SIPART PS2 型智能电气阀门定位器的工作原理与传统定位器完全不同。
采用微处理器对给定值和位置反馈作比较。
如果微处理器检测到偏差,它就用一个五步开关程序来控制压电阀,压电阀进而调节进入执行机构气室的空气流量。
当SIPART PS2 采用二线制连接时,它完全从4 至20mA给定信号中获取电源。
亦可从PROFIBUS(SIPART PS2 PA)总线信号中获取电源。
SIPART PS2 定位器采用适当的安装组件固定到直行程或角行程执行机构上,执行机构的直线或转角位移通过安装的组件检测并由一个刚性连接的导电塑料电位器转换,装在直行程执行机构上的组件检测得到的角度误差被自动地校正.微处理器根据偏差(给定值W 与位置反馈信号X)的大小和方向输出一个电控指令给压电阀。
压电阀将控制指令转换为气动位移增量,当控制偏差很大时(高速区)。
定位器输出一个连续信号;当控制偏差不大(低速区),定位器输出脉冲连续;当控制器偏差很小时(自适应或可调死区状态),则没有控制指令输出。
(2)调试调试(初始化)在很大程度上是自动进行的。
在初始化时,微处理器自动确定执行机构的零点,最大行程,作用方向和执行机构的定位速度,用这些来确定最小脉冲时间和死区,从而使控制达到最佳。
使用SIPART PS2定位器上的按键和LCD 可以手动操作气动执行机构。
用于定位器、执行机构和调节阀的监控和诊断功能SIPART PS2(6DR5...)具有检测和当选择极值报警时,能报告执行机构和调节阀变化的多项监控功能,这种诊断对调节阀和执行机构是重要的信息。
可实现测量值(一些极值可调整)的确定和监控,包括:· 行程累积· 行程方向改变次数· 报警计数· 死区自调整· 阀门极限位置(例如:阀座的磨损)· 最高/最低温度下的运行小时数(按照温度等级)· 压电阀运行循环数· 阀门定位时间· 执行机构泄漏对于一台新的或停电时间过长的智能阀门定位器,需重新设置参数,并进行初始化,使其符合使用要求,否则阀门定位器将无法正常运行。
西门子智能定位器调试说明
西门子智能定位器调试说明大家好,今天我要给大家讲解一下如何调试西门子智能定位器。
我们要明确一点,这个定位器可不一般,它可是高科技产品,有了它,我们的工作生活就会变得更加便捷。
那么,让我们一起来看看如何让这个神奇的定位器发挥出它的最大功效吧!1. 准备工作在开始调试之前,我们需要做好一些准备工作。
确保定位器的电源已经接通,并且电压稳定。
我们需要了解定位器的使用说明书,这样才能更好地进行调试。
我们需要一台电脑,因为我们将通过电脑来控制和查看定位器的状态。
2. 连接定位器接下来,我们需要将定位器与电脑进行连接。
用USB线将定位器的USB接口与电脑的USB接口相连。
然后,打开电脑,进入设备管理器,查看是否能够识别到定位器。
如果能够识别到,那么恭喜你,第一步已经成功完成!3. 下载驱动程序为了能够更方便地控制和管理定位器,我们需要下载安装一款名为“西门子定位器助手”的软件。
这款软件可以帮助我们实时查看定位器的位置信息,以及对定位器进行一些基本的操作。
下载并安装好软件之后,我们就可以开始进行调试了。
4. 查看定位器状态现在,我们已经成功地将定位器与电脑连接在一起,并且安装好了相关软件。
接下来,我们需要查看定位器的状态。
在电脑上打开“西门子定位器助手”,选择“连接设备”,然后选择我们刚刚连接好的定位器。
此时,我们就可以看到定位器的实时位置信息了。
如果一切正常,那么恭喜你,第二步也已经成功完成!5. 调试定位器在确认定位器状态正常之后,我们就可以开始对定位器进行一些基本的调试了。
我们可以尝试改变定位器的移动方向,看看是否能够准确地显示出新的位置信息。
我们还可以调整定位器的灵敏度,以便更好地适应不同的环境和场景。
这些调试操作都需要在电脑上进行,非常简单方便。
6. 保存设置在完成所有的调试操作之后,我们需要将这些设置保存下来,以便下次使用时能够直接调用。
在“西门子定位器助手”中,选择“保存设置”,然后按照提示输入相关信息即可。
西门子定位器调试步骤.ppt

• 安装定位器 • 杠杆比率开关的位置:
冲程
杆
5~20mm 短
比率开关位 置
33°及以下
25~35mm 短
90°及以上
40~130mm 长
90°及以上
• 推动杆上驱动销钉的位置,到达额定冲程 的位置或更高的一个刻度后,用螺帽拧紧;
• 连接气源管路; • 连接指令线、反馈线; • 定位器处于“P manual”方式。在显示屏上
注意问题
• 如果DCS指令与实际动作相反,常按“工 作模式键”5秒以上,在“7.SDIR”菜单下 改变其参数,同时必须在“38.YDIR” 菜 单下改变其参数(位置反馈),以保证指 令与反馈的一致性。
•谢谢,欢迎指正!
一行显示当前位置。比如
备注:新安装未经调试成功的定位器上面板显示, 如右图所示。
• 通过+和-键移动执行机构到达上、下的最终 位置,来检查机械装置是否可在全部调整 范围内自由移动;
• 移动执行器,使杆达到水平位置,显示屏 显示一个介于到之间的值。如果杆在水平 位置,但是显示不在这个范围,调整夹紧 单元(那个圆形的螺母,可以用力转动)
总结
1、YFCT(执行机构的类型)Turn(角行程),Way(直行程) 2、YAGL(反馈角) 3、YWAY(行程值) 4、INITA(自动初始化) 5、ININM(手动初始化) 6、SCUR(输入电流范围) 7、SDIR(正反作用,上升/下降) 38、YDIR (操作变量方向显示,上升/下降) 55、PRST(工厂设置)
直行程执行机构初始化
• 按方式键5s以上,进入组态方式; • 短按方式键,切换组态参数; • 切换到参数4 INITA,按住+超过5s,初始化
西门子定位器ppt课件
3.短按方式键 ,切换到第二参数: 显示: 或 注:这一值必需与传送速率选择器的设定 相对应。(33°或90°) 4.用方式键 转到下列显示: 如果你希望初始化过程结束时,测定的全 冲程用mm 表示,你需要在显示器中选择与 驱动销钉在杆刻度上设定的值相同,或对 介质调整来说下一个更高的值。
5.通过下按方式键
直行程执行机构的初始化
1.下按方式键 式。 显示: 5 秒以上,进入组态方
TURN(角行程执行器) Way(直行程执行器) Lway(无正弦修正的直行程执行器) Ncst(带NCS的角行程执行器) ncst(相同,改变作用方向)
2.通过短按方式键 ,切换到第二参数。 显示: 或 这一参数 需与杠 杆比率开关的设定值相匹配。 3.用方式键 切换到下列显示显示:
西门子定位器的调试
由于有多种应用,所以定位器装配后必须 与执行机构相适应(初始化)。初始化可 用以下三种方式进行: 1. 自动初始化 初始化是自动进行的。定位器顺序测定作 用方向,行程或转角、执行器的行程时间, 并配以执行器动态工况时的控制参数。 2. 手动初始化 执行机构的行程或转角可用手动调整;其 余参数同自动初始化一样自动测定。这一 功能在软端停时需要。
在你短促下压方式键
:
后,出现显示:
通过下按方式键 超过5 秒,退出组态方 式。约5 秒后,软件版本显示,在你松开方 式键时,处于手动方式。
直行程执行器手动初始化
直行程执行机构手动初始化的顺序步骤 1.对直行程执行机构实行初始化。通过手 工驱动保证覆盖全部冲程,即显示电位计 设定处于P5.0 和P95.0 的允许范围中间。 2.下按方式键 5 秒以上,你将进入组态 方式。显示:
3.用气动管缆连接定位器与执行机构,给 定位器提供气源。 4.连接相应的电流或电压源。 5.现在定位器处于“P manua1”方式。在 显示屏上一行显示当前电位计的百分比电 压值(P), 例如“P 37.5”,显示屏下行“NOINI”在闪 烁:显示 注:同时按下 一参数。 键和 键,你可以返回前
西门子定位器调试参考文档41页PPT

56、极端的法规,就是极端的不公。 ——西 塞罗 57、法律一旦成为人们的需要,人们 就不再 配享受 自由了 。—— 毕达哥 拉斯 58、法律规定的惩罚不是为了私人的 利益, 而是为 了公共 的利益 ;一部 分靠有 害的强 制,一 部分靠 榜样的 效力。 ——格 老秀斯 59、假如没有法律他们会更快乐的话 ,那么 法律作 为一件 无用之 物自己 就会消 灭。— —洛克
60、人民的幸福是至高无个的法。— —西塞 罗
谢谢你的阅读我已经踏上这条道路,那么,任何东西都不应妨碍我沿着这条路走下去。——康德 72、家庭成为快乐的种子在外也不致成为障碍物但在旅行之际却是夜间的伴侣。——西塞罗 73、坚持意志伟大的事业需要始终不渝的精神。——伏尔泰 74、路漫漫其修道远,吾将上下而求索。——屈原 75、内外相应,言行相称。——韩非
西门子定位器调试步骤
西门子定位器调试步骤一、安装:安装之前先通气,使摆动气缸处于完全关闭状态,同时阀门也要处于关闭状态,这时将气路断开将摆动气缸与阀门安装固定;二、调整确定气路:将定位器进气管和出气管与摆动气缸连接,接通气源,将气压调整到0.4-0.6之间,此时阀门应处于关闭状态,否则将摆动气缸两条气路对换,调整好后气路无需再次更换。
此步操作为确保阀门断电时处于关闭状态;三、改变行程:打开定位器端盖,将比率开关位置调整到90°;四、手动检查:接通4-20mA电流(端子6,8;6+,8-),在组态方式下内(通过长按方式键进入和退出组态方式,正常显示时短按方式键切换手动自动方式)将参数1改为turn,退出组态方式,进入手动方式,按+键阀门应该逐渐打开,按-键阀门应该逐渐关闭。
(若相反,应改变参数1为ncsl)在阀门全行程范围内应转动灵活,无卡阻现象和异响;五、确定显示:手动方式进行检查时,阀门全开时,阀门开度显示值应最大,阀门全关时,阀门开度显示值应最小,否则改变参数38六、确定自动控制方向:切换至自动方式,送入4mA电流阀门应关闭,送入20mA电流阀门应打开,否则改变参数7;七、初始化:通过上述操作,定位器基本信息都已确定。
进入组态方式,在参数4状态下,长按+键,进行自动初始化,初始化完毕会显示finish(期间可能会提示调整量程下限,调整转差离合调整轮,使显示处于8左右后短按+键,初始化会继续完成),短按方式键退出组态方式,长按方式键退出组态方式。
八、开关量确定:将仪表预给料触点接至(端子9,10)将定位器参数42改为DOWN,停止预给料,阀门应全部关闭。
九、输出电流测试:若配置输出电流反馈板,将电流板安装连接好,测试在不同开度电路输出值均正确(至少测试四个点)方可。
十、调试结果检查:进入自动方式,送入4mA 阀门应完全关闭同时显示为最小值,送入12mA阀门应处于半开状态同时显示为量程的一半左右,送入20mA阀门应处于完全打开状态同时显示为最大值,此时断电阀门在气压作用下应完全关闭。
西门子智能定位器的安装与调试

=
小。有几种选择可纠正这一错误: · 用增加和减少键驱动到另一终点位置。 · 通过下按方式键中断初始化,这样你已切换到 P-Manual 方式,按照步骤1 修改 行程和进行位置测量。 注: 如果信息 Set Middle 出现,杆臂必需用增加和减少键移到水平位置,并按压方式 键。这样调整直 行程执行机构正弦修正基准点。 2.9 初始化的停止是自动出现的。RUN1 到RUN5 顺序出现在显示屏的下行。当初始化 已全部完成时,出现如下显示: 显示:
因为我厂所用西门子定位器的气动调门都是直行程,所以以下以直行程为例介绍 调试步骤。 1、直行程执行机构的初始化 正确移动执行机构,离开中心位置,开始初始化。 1.1 下按方式键 5 秒以上,进入组态方式。 显示:
1.2 通过短按方式键 显示:
,切换到第二参数。
或
注: 这一参数必需与杠杆比率开关的设定值相匹配。
图.1 SIPART PS2 或SIPART PS2 PA 智能电气阀门定位器
1、原理结构
二、西门子智能定位器的安装
图.2 SIPART PS2 EEx d (PA)型 在直行程执行机构上安装
图.19 SIPART PS2 EEx d (PA) 型在角行程执行机构上安装
一、西门子智能定位器的调试
附件1
操作—简要说明
2.6 下按增加键5 秒以上,开始初始化 显示: 2.7 5 秒之后,显示改变: 显示: 注: 如果信息 RANGE 在下行出现,所选终点位置在规定测量范围之外。有几种选择可纠 正这一错误: · 调整磨擦夹紧单元,直到出现 OK,然后再按一次方式键。 · 用增加键和减少键趋动到另一个结束位置。 · 下按方式键,中断初始化,你已切换到手动方式,按照第 1 步校正行程和测量 位置。 2.8 第7 步成功完成后,出现下列显示: 显示: 注: 如果信息RANGE 出现在下行,所选终点位置超出允许的测量范围,或者是测量跨度太
西门子定位器调试
西门子定位器调试及智能定位器技术介绍压电阀介绍:1、引言传统的气动阀中大量使用了电磁铁作为电—机械转换级,其把电控制信号转换为机械的位移,推动阀芯,实现气路的切换或气体压力、流量的比例控制。
作为电-机械转换级的电磁铁有价格低廉,操作使用方便等优点;但其也有很多缺点:如功耗大、响应速度不够快、存在发热及有电磁干扰等。
把压电材料的电一机械转换特性引入到气动阀中,作为气动阀的电-机械转换级,这是一项不同于传统气动阀的全新技术。
采用了压电技术的气动阀在性能上有着传统气动阀无可比拟的优势。
2、压电效应简介对于晶体构造中不存在对称中心的异极晶体,加在晶体上的张紧力、压应力或切应力,除了产生相应的变形外,还将在晶体中诱发出介电极化或电场。
这一现象被称为正压电效应;反之,若在这种晶体上加上电场,从而使该晶体产生电极化,则晶体也将同时出现应变或应力,这就是逆压电效应。
两者通称为压电效应。
1880年居里兄弟发现了电气石的压电效应,从此开始了压电学的历史。
压电式气动换向阀即是利用压电逆效应而研制的。
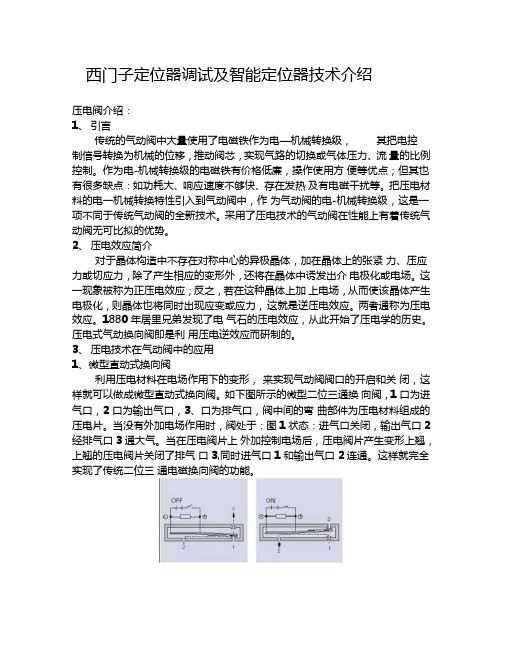
3、压电技术在气动阀中的应用1、微型直动式换向阀利用压电材料在电场作用下的变形,来实现气动阀阀口的开启和关闭,这样就可以做成微型直动式换向阀。
如下图所示的微型二位三通换向阀,1 口为进气口,2 口为输出气口,3、口为排气口,阀中间的弯曲部件为压电材料组成的压电片。
当没有外加电场作用时,阀处于:图1状态:进气口关闭,输出气口2经排气口3通大气。
当在压电阀片上外加控制电场后,压电阀片产生变形上翘,上翘的压电阀片关闭了排气口3,同时进气口1和输出气口2连通。
这样就完全实现了传统二位三通电磁换向阀的功能。
图1 图22、压电式电气比例调压阀压电材料的变形量正比于施加在其上的电场强度,利用这一特点,可以开发出比例调压阀。
如图3所示,施加不同的控制电压到压电阀片上,压电阀片产生不同的弯曲变形量,这样就在进气口1与输出气口2之间及输出气口2与排气口3之间形成不同的气流阻力,从而在输出气口2 的得到不同的气体压力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
问题四:在初始化第二步过程中还会 出现故障“MIDDL”信息。
解决方法:按住相应“-”、“+”键,驱 动执行机构,当行程至中间位置,即P 后阀位显示50左右时,即可退回到参 数4重新进行自动初始化。
问题五:在初始化第二部过程中出现 故障“U-d”信息。
解决方法:调节滑动夹紧装置的调节 轮,使P后开度值显示比较低的数值。 或者将参数2由把33°改为90°即可解 决。
二、西门子定位器的优点
①直行程和角行程执行机构采用同一类 型的阀门定位器 ②三个按键和双行LCD 显示可实现简捷 的操作和编程 ③具有零位和行程范围自动调整的功能 手动操作时无需另外的设备 ④具有自诊断功能 ⑤耗气量极小 ⑥设定值和控制变量极限值可进行选择 ⑦可编程设置阀门"紧密关闭"功能
鉴于以上优点,所以我厂三期大量使 用其产品。现在热工机控班设备常用 的西门子定位器的型号是:6DR50200NG00-0AA0,这是一款双作用执行机 构的塑铝外壳产品 ,常用于气动直行 程和角行程执行机构。
亦可从PROFIBUS(SIPART PS2PA) 总线信号中获取电源。
四、定位器的安装
西门子定位器的安装非常简易,只需要将定位器 固定在阀体上,将反馈连杆按规定接好即可。
大家有疑问的,可以询问和交流
可以互相讨论下,但要小声点
五:气源管路连接
根据现场实际情况,将气源管路连接至中间,上 端接执行机构上气缸,下侧接下气缸,确保不漏 气即可。
这5步将自动进行,无需人为干涉 即可自动完成。
当显示 FINSH时, 即表示初
始化完成。 按组态键5 秒后退出
组态模式,
进入运行 模式。
手动初始化
按上述方法 进入参数5, 表示手动初 始化
按“+”键5 秒后,即可 进入手动初 始化第一步: 第一位置的 设定
按相应键驱动 执行机构之相 应的阀位。如: 最小阀位。
参数3表示阀杆 范围,默认为 OFF。
角行程,可选OFF
直行程,可选OFF 也可根据实际行 程选择相应的长 度。通常按大一 级别选择。
第三步:自动初始化
参数4表示自 动初始化,默 认NO
按住“+”键大 于5秒,即可执 行自动初始化。
自动初始化将分5步进行 RUN1:确定正、反作用 RUN2:调节零点和行程 RUN3:测定执行时间(漏气量测试) RUN4:最小化定位增量 RUN5:优化瞬时响应
同时为便于维护和运行,我们班已经 将部分国产吴忠定位器更换西门子定 位器。
所以学会西门子定位器的调试方式是 日常维护和消缺的最基本技能。
三、西门子定位器功能介绍
通讯形式:
具有使用0/4 到20mA 带HART 通 讯信号(可选择)
具有PROFIBUS-PA 通迅接口 (EEx ia)。
工作方式
采用微处理器对给定值和位置反馈作 比较。如果微处理器检测到偏差,它 就用一个五步开关程序来控制压电阀, 压电阀进而调节进入执行机构气室的 空气流量。当SIPART PS2 采用二线 制连接时,它完全从4 至20mA给定信 号中获取电源。
按组态键一下, 确认完成第一 位置,同时进 入第二位置设 定点。
按相应键驱 动执行机构 之相应的阀 位。如:最 大阀位。
按组态键一下, 进入初始化状 态。一下过程 与自动初始化 过程相同。
八、初始化过程中的常见故障
在初始化过程中,由于安装和气源的 问题通常会出现以下问题: 问题一:在初始化RUN1时,出现 ERROR信息,执行器不动作。 解决方法:第一步就出现ERROR,一般 不是定位本身原因,需检查安装气路。 是否气源压力过小;反馈连杆是否松 动;进气口与出气口是否接反等。
西门子定位器调试
一、西门子定位器的简介
SIPART PS2 系列智能电气阀门定位 器用于气动直行程或角行程执行机构 的控制。智能电气阀门定位器驱动执 行机构使阀门到达与给定值相对应的 位置。附加功能输入可用于锁定阀位 或驱动阀门达到安全的位置。为此, 在基型产品中都有一个用于这个目的 的二进制输入接口。问题二:在初始化进行源自RUN2时,出现信息。
解决方法:通过拨动滑动夹紧装置的
调节轮使代码中出现
“0” ,
让P后面的阀位显示在5-10之间即可。
下端的
滑动夹
紧装置
的调节 轮
问题三:第二步过程中还会出现故障 信息 解决方法:只需要拨动滑动夹紧装置 的调节轮使P后面的阀位显示在90-95 之间即可。
少数情况下会出现,问题二和问题三 交替出现,则可修改传动比率选择器 的角度关系来改善。比如把33°改为 90°即可解决。
在按照上述方法将定位器固定好,连 接好电源气源后即可开始调试。
西门子定位器的调试:由于有多种应 用,所以定位器安装完成后必须与执 行机构相适应(初始化)。初始化可用以 下三种方式进行 :
①自动初始化
初始化是自动进行的。定位器顺序测定作用方向, 行程或转角、执行器的行程时间,并配以执行器 动态工况时的控制参数。
第一步:进入组态模式
第二步:设置参数
按”-”或”+” 键即可改变 设置.
TURN为角行 程执行机构
• 注意:所选角度要与 传动比率选择器相对 应
参数2表示 旋转角度,对 于角行程执 行机构,均 选择90°。 对于直行程 执行机构, 当行程大于 25mm时也 选择90°。
传动比率选择器
直行程机构小于 25mm的时候, 按”-”或”+”键 改变设置,选择 33°,同时也要 注意与传动比率 选择器相对应。
六、内部接线
6DR5020型定位器内部只有两组接线,即指令和 反馈。均为4mA-20mA信号,其中串联了24VDC 电源信号。
注意:
由于是直流电源,且勿将电源极性接 反,否则可能烧毁定位器或反馈板。
通常是#7端子接指令正极 #8端子接指令负极 #61端子接反馈正极 #62端子接反馈负极
七、调试
②手动初始化
• 执行机构的行程或转角可用手动调整;其余参数 同自动初始化一样自动测定。这一功能在软端停
时需要 。
③复制初始化数据(定位器的置换)
• 对具有HART 功能的定位器,其初始化数据可以 读出并传送到另一个定位器。因此,更换一台故 障定位器,不会因为初始化而中断生产过程。
自动初始化
在一台定位器上电后显示如下: