编码器的相关计算
伺服电机选型和编码器选型计算

伺服电机选型和编码器选型计算
摘要
本文介绍了如何进行伺服电机和编码器的选型计算。
通过以下步骤,您可以选择适合您应用需求的伺服电机和编码器组合。
1. 确定应用需求
首先,您需要确定您的应用的一些关键需求,例如输出动力、扭矩要求、速度要求等。
2. 计算负载参数
根据您的应用需求,计算系统的负载参数,例如惯性矩、负载扭矩等。
这些参数将帮助您选择合适的伺服电机。
3. 伺服电机选型计算
使用所得到的负载参数,结合电机性能曲线和应用需求,计算所需的伺服电机的额定功率和最大扭矩。
同时,考虑电机的尺寸和重量限制来选择合适的型号。
4. 编码器选型计算
对于伺服电机,选择适当的编码器也是重要的。
根据应用需求和所选电机的分辨率,计算编码器的分辨率、线数和精度等参数。
5. 选择合适的组合
最后,在满足应用需求的前提下,根据电机和编码器的参数进行选择,以确保系统性能达到预期。
6. 总结
选型计算是有效选择适合应用需求的伺服电机和编码器的重要步骤。
通过明确应用需求、计算负载参数、进行选型计算和选择合适的组合,您可以确保您的系统能够高效稳定地工作。
以上是关于伺服电机选型和编码器选型计算的简要指南。
希望对您有所帮助!。
编码器格雷码的计算
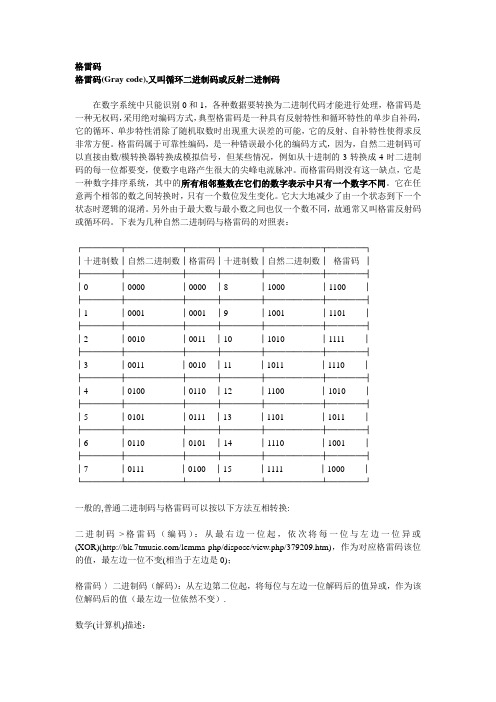
格雷码格雷码(Gray code),又叫循环二进制码或反射二进制码在数字系统中只能识别0和1,各种数据要转换为二进制代码才能进行处理,格雷码是一种无权码,采用绝对编码方式,典型格雷码是一种具有反射特性和循环特性的单步自补码,它的循环、单步特性消除了随机取数时出现重大误差的可能,它的反射、自补特性使得求反非常方便。
格雷码属于可靠性编码,是一种错误最小化的编码方式,因为,自然二进制码可以直接由数/模转换器转换成模拟信号,但某些情况,例如从十进制的3转换成4时二进制码的每一位都要变,使数字电路产生很大的尖峰电流脉冲。
而格雷码则没有这一缺点,它是一种数字排序系统,其中的所有相邻整数在它们的数字表示中只有一个数字不同。
它在任意两个相邻的数之间转换时,只有一个数位发生变化。
它大大地减少了由一个状态到下一个状态时逻辑的混淆。
另外由于最大数与最小数之间也仅一个数不同,故通常又叫格雷反射码或循环码。
下表为几种自然二进制码与格雷码的对照表:┌────┬──────┬───┬────┬──────┬────┐│十进制数│自然二进制数│格雷码│十进制数│自然二进制数│格雷码│├────┼──────┼───┼────┼──────┼────┤│0 │0000 │0000 │8 │1000 │1100 │├────┼──────┼───┼────┼──────┼────┤│1 │0001 │0001 │9 │1001 │1101 │├────┼──────┼───┼────┼──────┼────┤│2 │0010 │0011 │10 │1010 │1111 │├────┼──────┼───┼────┼──────┼────┤│3 │0011 │0010 │11 │1011 │1110 │├────┼──────┼───┼────┼──────┼────┤│4 │0100 │0110 │12 │1100 │1010 │├────┼──────┼───┼────┼──────┼────┤│5 │0101 │0111 │13 │1101 │1011 │├────┼──────┼───┼────┼──────┼────┤│6 │0110 │0101 │14 │1110 │1001 │├────┼──────┼───┼────┼──────┼────┤│7 │0111 │0100 │15 │1111 │1000 │└────┴──────┴───┴────┴──────┴────┘一般的,普通二进制码与格雷码可以按以下方法互相转换:二进制码->格雷码(编码):从最右边一位起,依次将每一位与左边一位异或(XOR)(/lemma-php/dispose/view.php/379209.htm),作为对应格雷码该位的值,最左边一位不变(相当于左边是0);格雷码-〉二进制码(解码):从左边第二位起,将每位与左边一位解码后的值异或,作为该位解码后的值(最左边一位依然不变).数学(计算机)描述:原码:p[0~n];格雷码:c[0~n](n∈N);编码:c=G(p);解码:p=F(c);书写时从左向右标号依次减小.编码:c=p XOR p[i+1](i∈N,0≤i≤n-1),c[n]=p[n];解码:p[n]=c[n],p=c XOR p[i+1](i∈N,0≤i≤n-1).Gray Code是由贝尔实验室的Frank Gray在20世纪40年代提出的(是1880年由法国工程师Jean-Maurice-EmlleBaudot发明的),用来在使用PCM(Pusle Code Modulation)方法传送讯号时避免出错,并于1953年3月17日取得美国专利。
多圈绝对值编码器旋转圈数

多圈绝对值编码器是一种常用的位置检测传感器,它可以输出绝对位置的编码信号,从而实现对旋转轴的精确控制。
在许多应用场景中,如机器人、数控机床、自动化生产线等,多圈绝对值编码器被广泛应用于旋转轴的位置检测。
本文将围绕多圈绝对值编码器旋转圈数的计算方法展开讨论,主要分为以下部分:多圈绝对值编码器的结构原理、如何读取编码器的脉冲信号、计算旋转圈数的一般方法以及实际应用中的注意事项。
首先,让我们了解一下多圈绝对值编码器的结构原理。
多圈绝对值编码器通常由码盘、电机、驱动电路和控制器等组成。
码盘是由许多同心圆环组成的一个多圈结构,每个圆环上都刻有数字码,用于表示旋转轴的绝对位置。
电机通过驱动码盘旋转,从而带动同心圆环运动。
驱动电路负责将电机的旋转运动转化为脉冲信号,并通过控制器进行解码。
读取编码器的脉冲信号是计算旋转圈数的基础。
一般来说,编码器会输出一个脉冲信号,对应码盘旋转一个单位角度。
通过计数器读取脉冲信号的数量,可以得出码盘旋转的总角度数。
对于多圈绝对值编码器,需要进一步解码以获取具体的旋转圈数。
具体来说,需要将编码器的脉冲信号与起始参考脉冲进行比较,以确定当前旋转位置是否跨越多圈。
如果跨越多圈,需要将总角度数除以多圈占比,得到新的起始参考角度,重新计数。
接下来,我们来讨论计算旋转圈数的一般方法。
首先,需要确定编码器的分辨率和脉冲当量。
分辨率是指编码器能够分辨的最小角度值,通常用编码器刻度数与总角度数的比值来表示。
脉冲当量是指编码器每旋转一个单位角度所产生的脉冲数。
通过这些参数,我们可以得到每个角度对应的脉冲数量。
在实际应用中,可以通过计数器读取编码器输出的脉冲信号数量,再结合每个角度对应的脉冲数量,就可以得到码盘旋转的总角度数。
为了计算旋转圈数,我们需要将总角度数除以360度(一圈的角度),再乘以每圈的占比。
每圈的占比通常由设备制造商提供,也可以根据设备的具体应用情况自行计算。
具体来说,如果设备是通过码盘上的同心圆环来区分不同的旋转圈的,那么可以根据每个圆环的长度和码盘的总长度来计算每圈的角度占比。
编码器计算设定
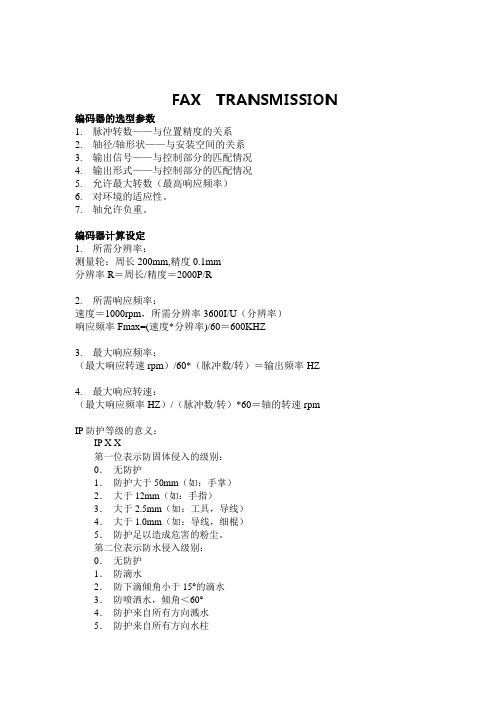
FAX TRANSMISSION 编码器的选型参数1.脉冲转数——与位置精度的关系2.轴径/轴形状——与安装空间的关系3.输出信号——与控制部分的匹配情况4.输出形式——与控制部分的匹配情况5.允许最大转数(最高响应频率)6.对环境的适应性。
7.轴允许负重。
编码器计算设定1.所需分辨率:测量轮:周长200mm,精度0.1mm分辨率R=周长/精度=2000P/R2.所需响应频率:速度=1000rpm,所需分辨率3600I/U(分辨率)响应频率Fmax=(速度*分辨率)/60=600KHZ3.最大响应频率:(最大响应转速rpm)/60*(脉冲数/转)=输出频率HZ 4.最大响应转速:(最大响应频率HZ)/(脉冲数/转)*60=轴的转速rpm IP防护等级的意义:IP X X第一位表示防固体侵入的级别:0.无防护1.防护大于50mm(如:手掌)2.大于12mm(如:手指)3.大于2.5mm(如:工具,导线)4.大于1.0mm(如:导线,细棍)5.防护足以造成危害的粉尘。
第二位表示防水侵入级别:0.无防护1.防滴水2.防下滴倾角小于15°的滴水3.防喷洒水,倾角<60°4.防护来自所有方向溅水5.防护来自所有方向水柱6.防护水溏或高压水柱7.侵于水中150mm~1m深,防水8.埋于水中,适合连续侵于水中,防水(例如:IP65即表示完全防尘,并可以防护来自所有方向的水柱)IP(INTERNATIONAL PROTECTION)防护等级系统是由IEC(INTERNA TIONAL ELECTROTECHNICAL COMMISSION)所起草。
如防护等级IP54,IP为标记字母,数字5为第一标记数字,4为第二标记数字第一标记数字表示接触保护和外来物保护等级,第二标记数字表示防水保护等级接触保护和外来物保护等级(第一个数字)第一个数字防护范围0 无防护1 防护50mm直径和更大的固体外来体2 防护12.5mm直径和更大的固体外来体3 防护2.5mm直径和更大的固体外来体4 防护1.0mm直径和更大的固体外来体5 防护灰尘不可能完全阻止灰尘进入,但灰尘进入的数量不会对设备造成伤害6 灰尘封闭完全防止外物侵入,且可完全防止灰尘进入。
自编码器 计算重构误差 阈值

自编码器计算重构误差阈值
自编码器是一种无监督学习的神经网络模型,它通过学习数据的特征表示来实现数据的压缩和解压缩。
在训练过程中,自编码器试图最小化输入和重构输出之间的差异,这种差异通常被称为重构误差。
重构误差是衡量自编码器性能的重要指标,它可以用来评估模型对输入数据的重建能力。
计算重构误差的常见方法包括均方误差(MSE)和平均绝对误差(MAE)。
均方误差是预测值与真实值之差的平方的平均值,而平均绝对误差是预测值与真实值之差的绝对值的平均值。
这些指标可以帮助我们了解自编码器在重构输入数据时的表现,从而评估模型的质量和性能。
阈值是一个重要的概念,它可以用来判断重构误差的大小是否超出了预期范围。
在实际应用中,我们可以根据重构误差的分布情况和业务需求来设定阈值。
如果重构误差超过了设定的阈值,我们可以认为输入数据的重建质量不佳,进而触发相应的处理机制,比如报警、重新训练模型等。
在实际应用中,确定阈值的过程可能需要结合领域知识和实际
经验,以及对业务影响的评估。
通常情况下,我们可以通过分析训练数据和验证数据的重构误差分布情况来选择一个合适的阈值,从而在实际应用中更好地监控自编码器的性能。
总之,自编码器的重构误差和阈值是评估模型性能和监控系统稳定性的重要指标,通过合理计算重构误差和设置阈值,可以更好地理解和管理自编码器模型在实际应用中的表现。
17位单圈绝对值编码器线数 -回复

17位单圈绝对值编码器线数-回复标题:深度解析17位单圈绝对值编码器线数一、引言在现代工业自动化领域中,编码器作为一种重要的位置和速度检测装置,其性能和精度直接影响到设备的运行效果和效率。
其中,单圈绝对值编码器因其能在一圈内提供唯一的绝对位置信息而被广泛应用。
本文将针对17位单圈绝对值编码器的线数进行深入探讨,以帮助读者更好地理解和使用此类编码器。
二、编码器基础知识首先,我们需要理解编码器的基本工作原理。
编码器是一种能将机械转动或直线运动转换为电信号的装置,通过测量这些信号的变化,可以得到运动物体的位置、速度和方向等信息。
在编码器中,线数是一个关键参数,它决定了编码器的分辨率和精度。
线数是指编码器内部码盘上的刻线数或者光电感应元件的数量。
每转过一条刻线或触发一个光电感应元件,编码器就会输出一个电脉冲信号,因此,线数越多,单位角度内产生的脉冲数就越多,编码器的分辨率也就越高。
三、17位单圈绝对值编码器的线数解析17位单圈绝对值编码器的“17位”表示其输出的二进制代码的位数,这意味着它能提供2^17=131072个唯一的绝对位置信息。
然而,这并不直接对应于编码器的线数。
要计算17位单圈绝对值编码器的实际线数,我们需要知道编码器的电气周期(也称为电气角度)。
电气周期是编码器输出一个完整周期(即所有位置都被唯一标识)所需的角度范围。
对于单圈绝对值编码器,其电气周期通常为360度。
假设17位单圈绝对值编码器的电气周期为360度,那么其线数可以通过以下公式计算:线数= 2^n / 360其中,n是编码器的位数。
将n=17代入公式,我们得到:线数= 2^17 / 360 ≈3600因此,17位单圈绝对值编码器的理论线数约为3600线。
这意味着在一圈360度的旋转中,编码器可以产生3600个唯一的电脉冲信号,每个脉冲对应的角度分辨率为1度。
四、实际应用中的考虑因素然而,在实际应用中,17位单圈绝对值编码器的线数可能会受到一些因素的影响。
光电编码器测速公式

光电编码器测速公式引言:光电编码器是一种常用的测速装置,它通过光电传感器和编码盘的配合工作,可以准确测量物体的转速。
在工业控制、机械制造和自动化领域中,光电编码器被广泛应用于测速、位置控制和运动监测等方面。
本文将详细介绍光电编码器的测速公式,以帮助读者更好地理解和应用这一技术。
正文:一、光电编码器的基本原理1.1 光电传感器光电传感器是光电编码器中的核心部件,它通过感知光的变化来检测物体的运动。
光电传感器通常由发光二极管(LED)和光敏电阻器(光电二极管或光敏三极管)组成。
当物体经过光电传感器时,光线被遮挡或反射,使光敏电阻器的电阻值发生变化,从而产生电信号。
1.2 编码盘编码盘是光电编码器中的另一个重要组成部分,它通常由透明材料制成,并在表面刻有一系列的透明和不透明条纹。
当编码盘随着物体的转动而旋转时,光线通过透明和不透明条纹的变化,使光电传感器接收到不同的光信号。
1.3 光电编码器的工作原理光电编码器的工作原理是基于光电传感器和编码盘的配合工作。
当物体转动时,编码盘随之旋转,光线通过透明和不透明条纹的变化,使光电传感器接收到不同的光信号。
通过计算光信号的变化频率和编码盘的刻度数,可以准确测量物体的转速。
二、光电编码器的测速公式2.1 脉冲计数法光电编码器的测速公式可以通过脉冲计数法来推导。
脉冲计数法是一种常用的测速方法,它通过计算单位时间内接收到的脉冲数来确定物体的转速。
测速公式可以表示为:速度(V)= 脉冲数(N)/ 时间(T)2.2 脉冲频率法脉冲频率法是另一种常用的测速方法,它通过计算单位时间内接收到的脉冲频率来确定物体的转速。
测速公式可以表示为:速度(V)= 脉冲频率(f)/ 编码盘的刻度数(N)2.3 脉冲周期法脉冲周期法是一种更精确的测速方法,它通过计算单位时间内接收到的脉冲周期来确定物体的转速。
测速公式可以表示为:速度(V)= 1 / 脉冲周期(T)* 编码盘的刻度数(N)三、光电编码器的应用3.1 工业控制光电编码器在工业控制领域中广泛应用于转速控制、位置反馈和运动监测等方面。
stm32 绝对值编码器计算转速
文章标题:深度解析STM32绝对值编码器计算转速1. 引言在现代工业控制系统中,对电机的运动状态进行监测和控制是至关重要的。
而绝对值编码器作为一种重要的位置传感器,被广泛应用在电机控制系统中。
本文将以STM32为主要开发评台,深入探讨如何利用STM32来计算绝对值编码器的转速。
2. 绝对值编码器简介绝对值编码器是一种能够直接输出旋转角度或位置信息的传感器。
相较于增量式编码器,绝对值编码器不会因为断电而丢失位置信息,因此在电机控制系统中具有很大的优势。
在STM32中,我们可以通过外部中断和定时器来捕获编码器的脉冲,并利用这些脉冲信号来计算电机的转速。
3. STM32的编码器接口配置在利用STM32进行绝对值编码器计算转速之前,首先需要进行编码器接口的配置。
通过STM32的GPIO配置和外部中断配置,我们可以实现对编码器信号的捕获。
还需要配置定时器来对脉冲信号进行计数,从而实现对电机转速的测量。
4. 脉冲计数与转速计算一旦STM32配置完成并捕获到编码器的脉冲信号,我们可以利用定时器的计数器来记录脉冲的数量。
通过记录脉冲的时间间隔和编码器的分辨率,可以精确地计算出电机的转速。
在STM32中,我们可以通过简单的数学运算来进行转速的实时计算,并得到精准的结果。
5. 实际应用与性能优化除了基本的编码器捕获和转速计算,STM32还提供了丰富的外设和功能模块,可以帮助我们进一步优化电机控制系统的性能。
利用DMA 控制器来提高编码器捕获的效率,利用定时器的中断功能来实现更精准的转速测量等。
这些高级功能的应用可以极大地提升电机控制系统的稳定性和精度。
6. 总结与展望通过本文的深度解析,我们对STM32如何计算绝对值编码器的转速有了更深入的理解。
绝对值编码器作为一种重要的位置传感器,在工业控制系统中扮演着重要的角色。
而STM32作为一种强大的嵌入式开发评台,为我们提供了丰富的功能和工具,可以帮助我们实现对编码器的高效捕获和转速的精准计算。
编码器 底层 位置 计算 算法
编码器底层位置计算算法全文共四篇示例,供读者参考第一篇示例:编码器底层位置计算算法在机械控制领域中起着至关重要的作用,尤其是在需要精准控制运动的设备中。
编码器是一种常用的传感器,它可以将机械位置或运动转换成数字信号,从而帮助控制系统准确地监测并控制机械运动。
底层位置计算算法则是对编码器输出数据进行处理和分析,以获取准确的位置信息。
在本文中,我们将探讨编码器底层位置计算算法的原理、常见算法和应用场景。
一、编码器介绍编码器是一种常见的位置传感器,广泛应用于各种机械设备中。
它通过测量旋转或线性运动,将位置或速度转换成数字信号。
编码器一般由光电传感器和编码盘(或编码带)组成,光电传感器用于检测编码盘上的光栅或标记,从而产生脉冲信号。
编码器的工作原理基本是测量角度或位移,并将其转换成数字形式,以供控制系统使用。
二、底层位置计算算法原理底层位置计算算法是对编码器输出脉冲信号进行处理和分析,以获得准确的角度或位移信息。
在很多应用中,编码器输出的信号是一串脉冲,需要根据脉冲的计数来计算位置。
通常情况下,底层位置计算算法会包括以下几个步骤:1. 接收编码器脉冲信号:控制系统会接收编码器输出的脉冲信号,这些脉冲信号可以表示机械的位移或转动。
2. 脉冲计数:接下来,系统会对接收到的脉冲信号进行计数,以确定机械的移动情况。
通常会将脉冲信号转换成数字形式,以方便计算和处理。
3. 位置计算:在得到脉冲计数之后,系统会根据编码器的分辨率和机械结构,将脉冲信号转换成具体的位置信息。
这个计算过程会考虑到编码器的分辨率、脉冲计数以及机械结构的参数。
4. 运动控制:系统会根据计算得到的位置信息,控制机械的运动,以实现精确控制和定位。
在实际应用中,有多种底层位置计算算法可以用来处理编码器输出的信号。
以下是一些常见的算法:1. 脉冲计数法:最简单的位置计算算法就是脉冲计数法,即根据编码器输出的脉冲信号计数来确定位置。
通过记录脉冲的数量,可以推算出机械的移动距离。
编码器计算公式范文
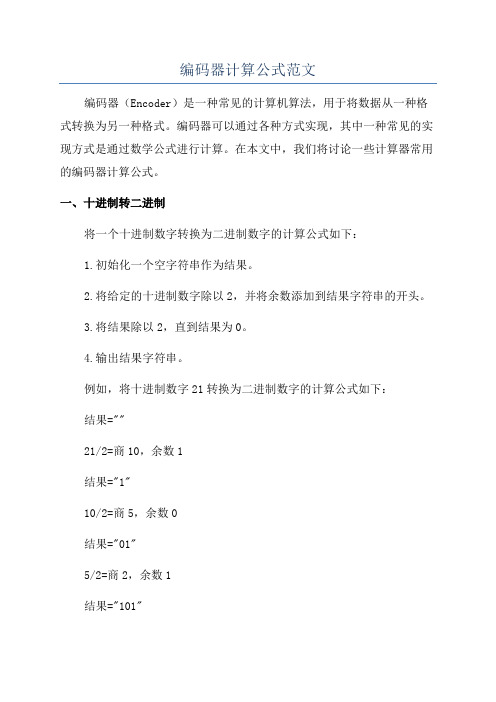
编码器计算公式范文编码器(Encoder)是一种常见的计算机算法,用于将数据从一种格式转换为另一种格式。
编码器可以通过各种方式实现,其中一种常见的实现方式是通过数学公式进行计算。
在本文中,我们将讨论一些计算器常用的编码器计算公式。
一、十进制转二进制将一个十进制数字转换为二进制数字的计算公式如下:1.初始化一个空字符串作为结果。
2.将给定的十进制数字除以2,并将余数添加到结果字符串的开头。
3.将结果除以2,直到结果为0。
4.输出结果字符串。
例如,将十进制数字21转换为二进制数字的计算公式如下:结果=""21/2=商10,余数1结果="1"10/2=商5,余数0结果="01"5/2=商2,余数1结果="101"2/2=商1,余数0结果="0101"1/2=商0,余数1二、二进制转十进制将一个二进制数字转换为十进制数字的计算公式如下:1.初始化结果为0。
2.将二进制数字从最低位开始,每一位乘以2的幂,然后将结果相加。
3.输出结果。
结果=0*2^0+1*2^1+0*2^2+1*2^3+0*2^4结果=0+2+0+8+0结果=10三、ASCII码转换将一个字符转换为对应的ASCII码的计算公式如下:1.查找ASCII码表,找到对应字符的ASCII码值。
2.输出ASCII码值。
例如,将字符'A'转换为对应的ASCII码的计算公式如下:'A'的ASCII码值为65因此,字符'A'转换为对应的ASCII码的计算公式为65四、凯撒密码凯撒密码是一种基于字母移位的加密算法,被用于将一个字母替换为另一个字母。
凯撒密码的计算公式如下:1.初始化一个空字符串作为结果。
2.遍历明文中的每一个字母。
3.将字母根据指定的位移量进行移位。
4.将移位后的字母添加到结果字符串中。
5.输出结果字符串。
磁编码器的角加速度
磁编码器的角加速度
角加速度的计算可以通过转速信号来完成。
一般来说,磁编码器会输出脉冲信号,通过高速计数器进行采集,根据编码器分辨率R,以及在单位时间内采集的脉冲数,可以计算出转速。
角加速度的测量同样基于转速信号。
具体来说,角加速度α可以通过角速度w和时间间隔dt来计算,公式为:α = w/dt。
其中,角速度w可以通过转速n和编码器分辨率R计算得出。
以上内容仅供参考,如需获取更多信息,建议查阅磁编码器相关书籍或咨询专业技术人员。
编码器计算速度程序实例

编码器计算速度程序实例【原创版】目录1.编码器计算速度程序概述2.编码器计算速度程序实例详解3.编码器计算速度程序实例的应用场景4.编码器计算速度程序的优化和改进正文一、编码器计算速度程序概述编码器计算速度程序是一个用于计算编码器速度的工具,它能够帮助用户根据编码器的参数和设置,快速准确地计算出编码器的计算速度。
编码器是一种将旋转运动转换为电信号的装置,广泛应用于各种自动化控制系统中。
在实际应用中,为了保证系统的精确性和稳定性,需要对编码器的计算速度进行精确的计算和调整。
编码器计算速度程序正是为了满足这一需求而设计的。
二、编码器计算速度程序实例详解下面是一个简单的编码器计算速度程序实例,该程序基于某品牌的编码器参数进行计算。
假设编码器参数如下:- 编码器类型:A 型- 编码器分辨率:1024- 编码器每转脉冲数:2048- 编码器输入电压:5V- 编码器输出电压:A 相 1.8-3.2V,B 相 1.8-3.2V,C 相 1.8-3.2V根据上述参数,我们可以编写如下程序:```pythondef calculate_speed(encoder_type, resolution,num_pulses_per_revolution, input_voltage, output_voltage): if encoder_type == "A":motor_speed = (output_voltage[0] + output_voltage[1] + output_voltage[2]) / 3 * resolution / num_pulses_per_revolution * 60else:motor_speed = 0return motor_speedencoder_type = "A"resolution = 1024um_pulses_per_revolution = 2048input_voltage = 5output_voltage = [1.8, 1.8, 1.8] # 编码器输出电压,三相电压平均值motor_speed = calculate_speed(encoder_type, resolution,num_pulses_per_revolution, input_voltage, output_voltage) print("编码器计算速度:", motor_speed, "转/分钟")```运行上述程序,可以得到编码器的计算速度。
transformer的数学计算过程
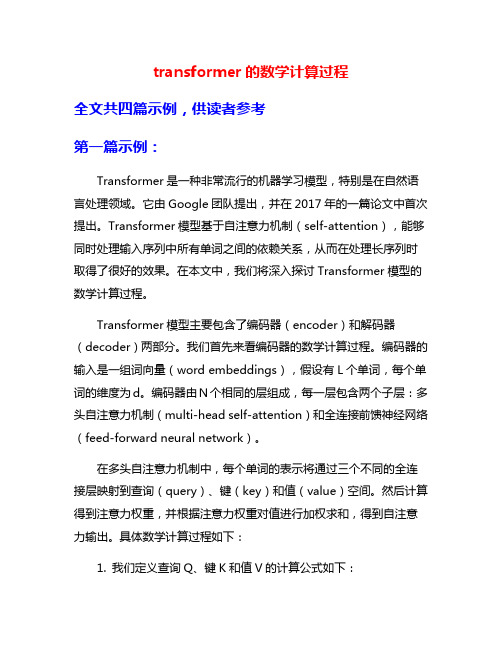
transformer的数学计算过程全文共四篇示例,供读者参考第一篇示例:Transformer是一种非常流行的机器学习模型,特别是在自然语言处理领域。
它由Google团队提出,并在2017年的一篇论文中首次提出。
Transformer模型基于自注意力机制(self-attention),能够同时处理输入序列中所有单词之间的依赖关系,从而在处理长序列时取得了很好的效果。
在本文中,我们将深入探讨Transformer模型的数学计算过程。
Transformer模型主要包含了编码器(encoder)和解码器(decoder)两部分。
我们首先来看编码器的数学计算过程。
编码器的输入是一组词向量(word embeddings),假设有L个单词,每个单词的维度为d。
编码器由N个相同的层组成,每一层包含两个子层:多头自注意力机制(multi-head self-attention)和全连接前馈神经网络(feed-forward neural network)。
在多头自注意力机制中,每个单词的表示将通过三个不同的全连接层映射到查询(query)、键(key)和值(value)空间。
然后计算得到注意力权重,并根据注意力权重对值进行加权求和,得到自注意力输出。
具体数学计算过程如下:1. 我们定义查询Q、键K和值V的计算公式如下:Q = XW^QK = XW^KV = XW^VX为输入的词向量矩阵,W^Q、W^K、W^V为三个不同的权重矩阵。
2. 接着,计算注意力分数:AttentionScore = softmax(QK^T / sqrt(d_k))d_k为查询Q或者键K的维度。
3. 根据注意力分数对值V进行加权求和:SelfAttentionOutput = AttentionScoreV在全连接前馈神经网络中,对每个位置上的表示进行两层全连接操作,并在两层之间进行激活函数ReLU的应用。
具体数学计算过程如下:1. 定义第一层的全连接操作:FFN_1 = ReLU(XW_1 + b_1)W_1和b_1为第一层的权重和偏置。
电机转圈数和编码器的圈数
电机转圈数和编码器的圈数1. 电机转圈数的定义和作用电机转圈数是指电机在工作过程中旋转的圈数。
它是衡量电机运行状态和性能的重要指标之一。
电机转圈数的大小和变化可以反映电机的转速、转向、负载等情况,对于控制和监测电机的运行状态具有重要意义。
电机转圈数的计算方法一般是通过编码器来实现。
编码器是一种能够测量或计算旋转物体转动角度的装置,它可以将旋转运动转换为电信号输出,从而实现对电机转圈数的测量和计算。
编码器一般由光电元件和信号处理电路组成,通过测量光电元件接收到的光信号的变化来计算转动角度。
电机转圈数和编码器的圈数密切相关,编码器的圈数是指编码器输出的脉冲信号的数量,每接收到一个脉冲信号就表示电机转过了一定的角度。
通过计算编码器的圈数,可以准确测量电机的转圈数,从而实现对电机运行状态的监测和控制。
2. 电机转圈数和编码器圈数的关系电机转圈数和编码器圈数之间存在着一定的关系。
通常情况下,电机转圈数是通过编码器圈数来计算得到的,两者之间存在着一定的比例关系。
具体来说,编码器的圈数可以通过测量编码器输出的脉冲信号的数量来得到。
假设编码器输出一个脉冲信号表示电机转过了一个角度,那么编码器的圈数就等于脉冲信号的数量。
而电机的转圈数可以通过编码器圈数和脉冲信号与转角的比例来计算得到。
比如,如果编码器的圈数是1000,每个脉冲信号表示电机转过了1°,那么电机的转圈数就等于编码器圈数除以360°,即1000/360=2.78圈。
需要注意的是,由于编码器的圈数是离散的,所以在计算电机的转圈数时可能存在一定的误差。
为了提高计算的准确性,可以采用更高分辨率的编码器或者使用多个编码器进行测量。
3. 电机转圈数和编码器圈数的应用电机转圈数和编码器圈数在工业自动化控制和机器人领域有着广泛的应用。
3.1 位置控制电机转圈数和编码器圈数可以用于位置控制。
通过测量电机的转圈数和编码器的圈数,可以实时获取电机的位置信息,并根据设定的目标位置进行控制。
编码器滤波算法

编码器滤波算法================一、概述----编码器滤波算法是一种在信号处理领域广泛应用的算法,尤其在音频、图像和视频处理中有着重要的应用。
本篇文章将详细介绍编码器滤波算法的基本原理、实现方法以及应用场景。
二、基本原理------编码器滤波算法的基本原理是通过滤波器对信号进行滤波处理,以达到消除噪声、提升信号质量的目的。
滤波器通常由一组过滤器元件组成,可以实现对不同频率分量的信号进行选择性的通过或抑制。
在编码器滤波算法中,滤波器的设计是非常关键的一步。
需要根据待处理信号的特点和要求,选择合适的滤波器类型和参数,以达到最佳的滤波效果。
三、实现方法------实现编码器滤波算法的基本步骤包括信号采集、滤波器配置、信号处理和结果输出。
具体来说,首先需要从传感器或其他来源获取原始信号,然后根据滤波算法的要求配置滤波器,再进行信号处理,最后将处理结果输出。
在实现过程中,需要注意滤波器的稳定性、数值计算误差、处理时间等因素的影响,需要通过合理的算法设计和实现来克服这些问题。
四、算法分类与比较----------编码器滤波算法可以分为有限脉冲响应(FIR)滤波器、无限脉冲响应(IIR)滤波器和递归滤波器和非递归滤波器等多种类型。
每种类型有各自的特点和适用场景。
FIR滤波器具有稳定性和良好的数值稳定性,适合用于对信号进行平滑处理;IIR滤波器可以实现对信号的精确控制和调整,适合用于对信号进行精确处理;递归滤波器可以实现快速的实时处理,适用于对实时性要求较高的应用场景;非递归滤波器可以通过分治策略降低计算复杂度,适用于对大规模数据集的处理。
五、应用场景------编码器滤波算法在许多领域都有应用,如音频编解码、视频处理、图像识别等。
在音频编解码中,编码器滤波算法可以有效地消除音频中的噪声,提升音质;在视频处理中,编码器滤波算法可以消除视频帧中的运动噪声,提升画面质量;在图像识别中,编码器滤波算法可以对图像进行预处理,提高特征提取的准确性。
双编码器补偿算法

双编码器补偿算法
双编码器补偿算法通常用于提高编码器的精度和稳定性。
这种算法基于两个编码器对同一位置进行测量,比较两者的结果,得到编码器的误差,并计算补偿系数。
以下是双编码器补偿算法的一般步骤:
1. 准备两个相同的编码器,将它们放置在相同的位置,并确保它们是同步的。
2. 记录每个编码器的输出信号,并将它们存储在计算机中。
3. 对于每个位置,比较两个编码器的输出信号,计算它们之间的差异。
4. 根据差异,确定编码器的误差,并计算补偿系数。
5. 使用补偿系数对每个编码器的输出信号进行修正,以消除误差。
6. 重复步骤2到5,直到所有的位置都被测量并补偿。
双编码器补偿算法的优点是可以提高编码器的精度和稳定性,同时减少单个编码器可能出现的故障或误差。
但是,这种方法需要使用两个编码器,增加了成本和复杂性。
编码器安装零点位置的找寻和计算

编码器安装零点位置的找寻和计算讲一点编码器的零点确定。
增量值编码器一般每圈提供一个z相(零位)信号,而绝对值编码器每个位置唯一,同样也有一个零位,那么,编码器在使用中如何确定零位呢?一般有如下几种方式:一。
编码器轴转动找零,编码器在安装时,旋转转轴对应零位,一般增量值与单圈绝对值会用这种方法,而轴套型的编码器也用这种方法。
缺点,零点不太好找,精度较低。
二。
与上面方法相当,只是编码器外壳旋转找零,这主要是对于一些紧凑型安装的同步法兰(也有叫伺服法兰)外壳所用,如图:三。
通电移动安装机械对零,通电将安装的机械移动到对应的编码器零位对应位置安装。
(伺服中带U/V/W信号的多用这种方法,关于这个题目,中国工控网论坛上的波恩网友有一篇很好的介绍,推荐给大家:/Forum/ForumTopic.aspx?Id=20081005121216 00001)四。
偏置计算,机械和编码器都不需要找零,根据编码器读数与实际位置的偏差计算,获得偏置量,以后编码器读数后减去这个偏置量。
例如编码器的读数为100,而实际位置是90,计算下在实际位置0位时,编码器的读数应该是10,而这个“10”就是偏置量,以后编码器读到的数,减去这个偏置量就是位置值。
可重复多次,修正偏置量。
对于增量值编码器,是读取原始机械零位到第一个Z点的读数,作为偏置量。
精度较高的编码器,或者量程较大的绝对值多圈编码器,多用这种方法。
五。
智能化外部置零,有些带智能化功能的编码器,可提供外部置位功能,例如通过编码器附带的按键,或外带的软件设置功能置零。
而我们提供的最新的Easypro?的智能化绝对值编码器,提供了一根外部置位线,将这个线与编码器供电的正电源短触一下,编码器此时的位置就是预先定好的预置位置(预置可以是零,也可以是其他事先约定的位置)。
六。
需要说明的是,绝对值编码器的零位再往下就是编码的循环最大值,无论是单圈绝对值,还是多圈绝对值,如果置零位,那么再往下(下滑、移动,惯性过冲等),就可能数据一下子跳到最大了,对于高位数的绝对值多圈,可能数据会溢出原来的设定范围。
编码器 底层 位置 计算 算法

编码器底层位置计算算法全文共四篇示例,供读者参考第一篇示例:编码器底层位置计算算法是指在编码器中用于准确确定位置信息的一种计算方法。
编码器是一种用于测量旋转角度或线性位移的装置,它通常由一个旋转编码器和一个线性编码器组成。
编码器的工作原理是利用光电传感器对信号进行采集,然后通过计算得出位置信息。
在实际应用中,编码器通常会被安装在各种设备中,如机床、机器人、汽车等。
编码器的位置信息对于这些设备的运动控制和定位非常重要。
编码器的位置计算算法必须具有高精度和稳定性,以确保位置信息的准确性和可靠性。
另一种常用的编码器底层位置计算算法是绝对式编码器。
绝对式编码器是通过每个位置点上的唯一编码序列来确定位置信息的一种算法。
每个位置点上都有一个唯一的编码序列,当编码器移动到不同的位置点时,就可以通过编码序列直接确定当前位置信息。
这种算法具有较高的精度和稳定性,能够准确、快速地确定位置信息。
除了增量式和绝对式编码器外,还有一些其他的编码器底层位置计算算法,如均值滤波算法、卡尔曼滤波算法等。
这些算法能够通过对信号进行平滑处理或者进行动态估计来提高位置信息的准确性和稳定性。
在实际应用中,不同的编码器底层位置计算算法会根据具体的需求和设备来选择。
一般来说,对于要求较高的精度和稳定性的应用,会选择使用绝对式编码器或者其他高级的算法;而对于一般的应用,增量式编码器通常已经能够满足要求。
第二篇示例:编码器是一种用于测量物体位置、速度或角度的设备,它可以将物体的运动转换成电信号输出,这些信号可以被计算机或控制器用来进行位置计算和控制。
在工业自动化领域,编码器被广泛应用于各种设备和机器人中,以确保精确的位置控制和运动控制。
在编码器的底层位置计算算法中,最常用的算法是增量式编码器和绝对式编码器。
增量式编码器通过测量物体运动的相对位移来计算位置,而绝对式编码器则可以直接读取物体的绝对位置,无需进行位置的积分和计算。
对于增量式编码器,位置计算的算法通常包括两个步骤:计算相邻两个脉冲之间的位移,并将这些位移进行累加以计算出物体的位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
编码器的相关计算
编码器计算距离:
首先知道:1编码器的精度,2编码器旋转1圈外围的距离对应多少
求出:每个脉冲对应多少距离,也叫脉冲当量。
编码器精度为1000P/R
螺距为10mm,即编码器旋转1圈外围走1个螺距10mm=10000um
脉冲当量=编码器旋转1圈的距离/编码器精度
式10000um/1000p=10um
已知:脉冲当量
高速计数当前计数值*脉冲当量=工作台当前实际位置
K100为测量指定时间
D0=100ms内脉冲个数存入D0中
D1=100ms内X0脉冲的当前值存放
D2=用于存放100ms测定的剩余时间
编码器计算速度(厘米/分)设编码器分辨率为1000线,脉冲当量=10um测定时间K1000=1S
式N=D0*60*10/10000
测电机转速(转/分)编码器分辨率为1000线式:N=(60*D0/n*t)*1000
D0为指定时间内产生脉冲数
N为编码器分辨率
T为程序中指定的测定时间。