3)机器人逆运动学实验
机械臂的运动学与逆运动学分析

机械臂的运动学与逆运动学分析机械臂是一种能够模拟人类手臂运动的自动化机器人。
它广泛应用于工业领域,用于完成各种复杂的操作任务。
机械臂的运动控制是实现其功能的关键,其中运动学和逆运动学分析是研究机械臂运动的基础。
一、机械臂的运动学分析运动学分析主要关注机械臂的位置、速度和加速度等运动参数的计算。
机械臂主要由关节连接的刚性杆件组成,每个关节可以沿特定方向进行旋转或平移运动。
在机械臂运动学中,我们关注的是机械臂末端执行器的位置和姿态。
1. 正运动学分析正运动学分析指的是根据机械臂各关节的运动参数,计算机械臂末端执行器的位置和姿态。
通常,我们采用坐标变换矩阵的方法来进行计算。
通过将各个关节的运动连续相乘,可以得到机械臂末端执行器相对于机械臂基座标系的位姿矩阵。
以一个3自由度的机械臂为例,设第一关节绕Z轴旋转角度为θ1,第二关节绕Y轴旋转角度为θ2,第三关节绕X轴旋转角度为θ3。
则机械臂末端执行器相对于基座标系的位姿矩阵可以表示为:[cos(θ2+θ3) -sin(θ2+θ3) 0 a1*cos(θ1)+a2*cos(θ1+θ2)+a3*cos(θ1+θ2+θ3)][sin(θ2+θ3) cos(θ2+θ3) 0 a1*sin(θ1)+a2*sin(θ1+θ2)+a3*sin(θ1+θ2+θ3)][0 0 1 d1+d2+d3][0 0 0 1]其中,a1、a2、a3和d1、d2、d3分别为机械臂的长度和位移参数。
通过这个矩阵,我们可以得到机械臂末端执行器的位置和姿态。
2. 速度和加速度分析除了机械臂末端执行器的位置和姿态,机械臂的速度和加速度也是非常重要的运动参数。
通过对机械臂运动学模型的导数运算,我们可以得到机械臂的速度和加速度表达式。
机械臂的速度可以表示为:v = J(q) * q_dot其中,v为机械臂末端执行器的速度向量,J(q)为机械臂的雅可比矩阵,q为机械臂各关节的角度向量,q_dot为各关节的角速度向量。
机器人正逆运动学分析实验心得体会
机器人正逆运动学分析实验心得体会
我有幸加强了在5月7至8号举行的第十六届河南省青少年机器人竞赛暨首届河南省青少年创客嘉年华活动,在活动中,我们还观看了fll工程挑战赛、vex—iq狂飙投篮赛、综合技能b类机器人投篮赛对于这两天的观摩培训,我只能用受益匪浅这四个字来形容。
对于这次的学习使我认识到:
一、让自己更加了解机器人,了解机器人的制作、编程。
机器人我是第一次近距离接触,以前只在电视上见过。
在短短的两天学习中我被机器人所吸引,也被其他老师的学习热情所感染。
通过这次的培训学习,我知道了自己的不足,不懂的东西很多,虽然很多知识我们还是一时消化不了,不过我想这个在我们以后的工作中会逐渐清楚的。
二、这次培训开阔了我们的眼界
这次培训我们观看了学生们的机器人比赛,了解了机器人比赛的一些规则,也向参加领赛的老师学习到了一些经验和需要注意的地方,对我们以后的比赛和教学方向,点明了道路,让我受益匪浅。
三、两天的培训我感到一种无形的压力。
SCARA机器人的运动学分析
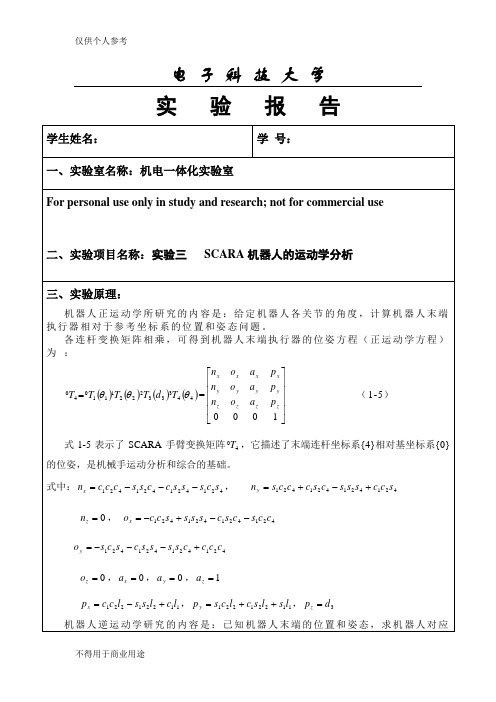
八实验数据及结果分析:
1.软件ቤተ መጻሕፍቲ ባይዱ运动学分析结果:
输入值
20
40
d3
-50
45
输出值
nx
-0.25819
ox
-0.9659
ax
0
px
255.459
ny
0.965926
oy
-0.2588
ay
0
py
185.317
给机器人四个关节各一个位移量利用运动学分析的正解方程求出它机器人末端的位置和姿态然后在机器人实验操作界面上打开机器人运动分析菜单输入同样的四个位移量让机器人求出它末端的位置和姿态看是否一样
电子科技大学
实验报告
学生姓名:
学号:
一、实验室名称:机电一体化实验室
For personal use only in study and research; not for commercial use
For personal use only in study and research; not for commercial use.
Nur für den persönlichen für Studien, Forschung, zu kommerziellen Zwecken verwendet werden.
以下无正文
nz
0
oz
0
az
1
pz
-240
手算正运动学分析
输入值
20
40
d3
-50
45
输出值
nx
-0.25820
机器人正运动学和逆运动学
机器人正运动学和逆运动学《探索机器人的运动学:正运动学与逆运动学》嗨,小伙伴们!今天咱们来聊一聊超级酷的机器人运动学,这里面包括正运动学和逆运动学呢。
我呀,最开始知道机器人的时候,就觉得它们像超级英雄一样。
它们可以做各种各样的动作,就像我们人一样灵活。
可是,你们有没有想过,机器人是怎么知道自己的胳膊腿儿该怎么动的呢?这就和机器人的运动学有关啦。
先来说说正运动学吧。
正运动学就像是一场神奇的魔法。
我们知道机器人的关节是可以动的,每个关节都有它自己的角度呀、长度呀这些东西。
正运动学呢,就是假如我们知道了这些关节的参数,就能算出机器人的末端执行器(就像是机器人的手或者工具那部分)在空间里的位置和姿态。
这就好比我们搭积木,我们知道每一块积木的形状和位置,那最后搭出来的东西是什么样我们就能知道啦。
比如说,一个简单的机械臂,它有三个关节,每个关节可以转动一定的角度。
如果我们知道这三个关节分别转动了多少度,那这个机械臂的“手”在空间里的哪个地方、是什么样的方向,我们就能算出来啦。
这是不是很神奇呢?这就像是我们知道了钥匙的形状,就能打开对应的锁一样准确呢。
那逆运动学又是什么呢?逆运动学可就有点像解谜啦。
我们知道机器人的末端执行器要到达空间里的某个位置,要摆出某个姿态,然后我们得去算出各个关节应该是多少度,应该怎么动。
这就好比我们看到了一幅画,然后要倒推回去是用哪些颜料、怎么画出来的。
比如说,我们想要机器人的手去拿桌子上的一个小玩具,我们知道小玩具在桌子上的位置,那机器人的胳膊、手腕这些关节要怎么动才能让手准确地到达那个位置呢?这可不容易呢。
有时候可能有好多种答案,就像一道数学题有好几个解法一样。
我问我爸爸这个问题的时候,爸爸就笑着说:“哎呀,这就像你要从家去学校,可能有好几条路可以走呢。
”我和我的小伙伴们呀,还专门做了一个小实验呢。
我们用一些简单的材料做了一个小小的模拟机器人手臂。
我们试着先按照正运动学的方法,设定好关节的角度,然后看末端的位置是不是我们算出来的那样。
《机器人导论》机器人逆运动学
《机器人导论》机器人逆运动学在机器人技术的广袤领域中,逆运动学是一个至关重要的概念。
简单来说,逆运动学就是要根据机器人末端执行器(比如机械手的夹爪)的期望位置和姿态,来计算出各个关节应该转动的角度或移动的距离。
想象一下,你有一个机械臂,它就像人的手臂一样,由多个关节连接而成。
当你希望它的手能够准确地到达某个特定的位置,并以特定的姿态抓住一个物体时,你就需要知道每个关节应该如何运动。
这就是逆运动学要解决的问题。
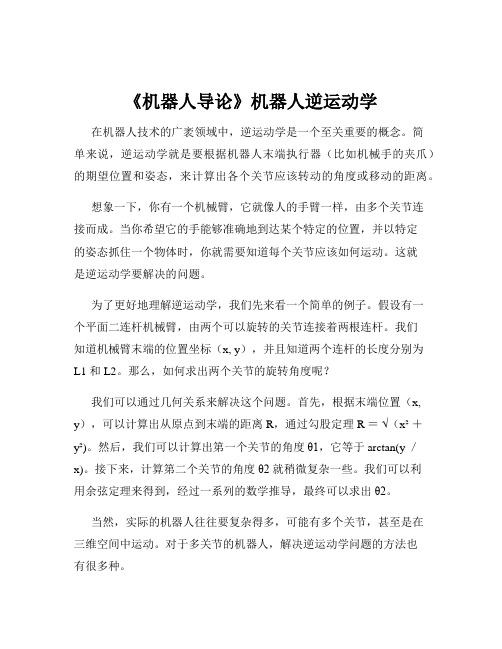
为了更好地理解逆运动学,我们先来看一个简单的例子。
假设有一个平面二连杆机械臂,由两个可以旋转的关节连接着两根连杆。
我们知道机械臂末端的位置坐标(x, y),并且知道两个连杆的长度分别为L1 和 L2。
那么,如何求出两个关节的旋转角度呢?我们可以通过几何关系来解决这个问题。
首先,根据末端位置(x, y),可以计算出从原点到末端的距离 R,通过勾股定理 R =√(x²+y²)。
然后,我们可以计算出第一个关节的角度θ1,它等于 arctan(y /x)。
接下来,计算第二个关节的角度θ2 就稍微复杂一些。
我们可以利用余弦定理来得到,经过一系列的数学推导,最终可以求出θ2。
当然,实际的机器人往往要复杂得多,可能有多个关节,甚至是在三维空间中运动。
对于多关节的机器人,解决逆运动学问题的方法也有很多种。
一种常见的方法是解析法。
这种方法通过数学推导和公式计算来直接求解关节变量。
但它的缺点是对于复杂的机器人结构,推导过程可能会非常繁琐,甚至可能无法得到解析解。
另一种方法是数值法。
其中比较常用的是迭代法。
它通过不断地猜测和修正关节变量的值,逐步逼近正确的解。
这种方法的优点是适用性广,但缺点是计算量可能较大,并且可能会陷入局部最优解。
在实际应用中,选择哪种方法取决于机器人的结构和具体的任务需求。
机器人逆运动学的应用场景非常广泛。
在工业生产中,机器人需要准确地抓取和放置零件,这就需要精确的逆运动学计算来控制机器人的动作。
机器人运动学正解逆解-课件
机器人正向运动学
工业机器人的正向运动学是指已知各关节的类型、相邻 关节之间的尺寸和相邻关节相对运动量的大小时,如何确 定工业机器人末端操作器在固定坐标系中的位姿。
主要包括以下内容:
1) 相对杆件的坐标系的确定; 2) 建立各连杆的模型矩阵A; 3) 正运动学算法;
D-H表示法
学习目标:1. 理解D-H法原理
C 2 S A2 2 0 0 S2 C2 0 0 0 C 2a2 0 S2a2 1 0 0 1
C 3 S A3 3 0 0
S3 C3 0 0
0 C 3a3 0 S3a3 1 0 0 1
C 4 S A4 4 0 0
y0
O0
连杆0
z0
d1 x0
解:
例2、PUMA560运动学方程(六个自由度,全部是旋转关节)
关节变量都是θ
θ2
θ1
θ3
θ4
θ5 θ6
PUMA560机器人的连杆及关节编号
A1
A2
为右手坐标系,Yi轴:按右手定则 Zi轴:与Ai+1关节轴重合,指向任意 Xi轴: Zi和Zi-1构成的面的法线, 或连杆i两端轴线Ai 与Ai+1的公垂线(即: Zi和Zi-1的公垂线)
变换矩阵,它们依次连乘的结果就是末端执行器(手爪)在基坐
标系中的空间描述,即
n o a 0 1 n -1 T1 (q1 ) T2 (q2 ) Tn 0 0 0
上式称为运动方程。
p 0 Rn 1 0
0
PnO 1
已知q1,q2,…,qn,求
S3 C3
依次类推,分别在方程2.19两边左乘A1~A4的逆,可得到
三自由度逆运动学
三自由度逆运动学三自由度逆运动学是机器人学中的重要内容之一,本文将以人类视角进行描述,详细介绍这一概念。
在机器人学中,逆运动学是指根据机器人的末端执行器的位置和姿态,计算出机器人关节的角度。
而三自由度逆运动学就是计算三个关节的角度的过程。
为了更好地理解三自由度逆运动学,我们可以想象一个机器人臂,它有三个关节,分别控制机器人臂的上下运动、前后运动和旋转运动。
当我们希望机器人臂达到特定位置和姿态时,就需要通过逆运动学来计算出每个关节的角度,以使机器人臂能够准确地到达目标位置。
我们需要确定机器人臂的末端执行器的位置和姿态。
这可以通过测量或者传感器来获取。
然后,我们需要将这些信息转化为数学模型,通过数学计算来求解关节角度。
在三自由度逆运动学中,我们可以使用向量和矩阵来表示机器人臂的位置和姿态。
接下来,我们需要根据机器人臂的运动范围和约束条件,确定每个关节的可行角度范围。
这可以通过机器人的结构和机械限制来确定。
然后,我们可以使用几何方法或者数值计算方法,根据机器人臂的数学模型和关节角度的约束条件,求解出每个关节的角度。
这一过程可以使用解析解法或者数值解法来实现。
解析解法是通过数学公式直接求解出关节角度,而数值解法则是通过迭代计算来逼近最优解。
我们可以将计算得到的关节角度发送给机器人控制系统,以控制机器人臂的运动,使其准确地到达目标位置和姿态。
通过三自由度逆运动学,我们能够实现机器人臂的精确控制,使其能够完成各种复杂的任务。
无论是在工业生产中的装配操作,还是在医疗领域的手术辅助,三自由度逆运动学都发挥着重要的作用。
三自由度逆运动学是机器人学中的重要内容,通过计算机算法和数学模型,能够实现机器人臂的精确控制。
它在工业生产、医疗等领域具有广泛的应用前景。
通过深入理解三自由度逆运动学,我们能够更好地掌握机器人技术,为人类的生产和生活带来更多便利和创新。
机器人逆运动学 matlab程序

文章标题:探索机器人逆运动学:从理论到实践一、引言机器人逆运动学是指通过已知末端执行器的位置、姿态等信息来计算机器人关节角度,使得机器人能够在空间中精确执行特定的任务。
逆运动学问题在机器人控制中具有重要意义,它涉及到数学、工程、计算机等多个领域的知识,也是机器人技术发展的热点之一。
在本文中,我们将从理论到实践,深入探讨机器人逆运动学,并通过编写Matlab 程序来实现逆运动学计算。
二、机器人逆运动学的理论基础1. 逆运动学问题概述逆运动学问题是指在已知末端执行器的位置、姿态等信息的情况下,求解机器人各关节的位置、角度等参数的过程。
逆运动学问题的求解涉及到数学建模、几何学、矩阵运算等多个领域的知识,是机器人控制中的核心问题之一。
2. 应用领域和意义机器人逆运动学的研究和应用涉及到工业制造、医疗机器人、空间探测器、智能交通等诸多领域。
在工业制造中,机器人逆运动学的准确计算和控制能够实现复杂工件的精密加工,提高生产效率。
在医疗机器人领域,逆运动学的研究应用能够实现微创手术和精准治疗,为患者带来更好的医疗体验。
3. 逆运动学解的求解方法机器人逆运动学问题的求解方法主要包括解析解法、数值解法和混合解法等。
解析解法适用于特定类型的机器人和运动学结构,能够给出精确的解析解。
数值解法通过迭代计算,适用于复杂的非线性逆运动学问题。
混合解法结合解析解法和数值解法的优点,提高了逆运动学问题的求解效率和精度。
三、机器人逆运动学的实践应用在实践应用中,我们将通过Matlab编程实现机器人逆运动学的计算,以帮助更好地理解和应用逆运动学的理论知识。
1. Matlab程序设计我们需要用Matlab对机器人的运动学模型进行建模和求解。
通过建立机器人的DH参数表和转换矩阵,我们可以利用Matlab中的符号计算工具箱求解机器人的逆运动学问题。
2. 机器人逆运动学计算在编写Matlab程序时,我们将通过输入末端执行器的位置、姿态等信息,利用机器人的运动学模型和逆运动学算法求解机器人的关节角度,并实现逆运动学问题的数值计算和可视化显示。
第三章工业机器人运动学3逆运动学

由于角φ已求出,比较式(3.48)等号两边矩阵第1行第3列和第3行第3 列元素相等有
sin f11(a) cos f13 (a)
或
(3.59) (3.60)
由此可得
sin cos ax sin ay cos az
tan 1 cos
ax sin az
ay
(3.61) (3.62)
(3.63)
同样比较式(3.48)等号两边矩阵的第2行第1列和第2行第2列元素可知
sin f12 (n)
(3.64)
cos f12 (o)
(3.65)
或
由此可得
sin sin nx cos ny cos sin ox cos oy
tan
1
sin sin
n o
x x
cos ny cos oy
1T6 =
C2( C4C5C6 - S4S6 ) - S2S5C6 S2( C4C5C6 - S4S6 ) + C2S5C6
S4C5C6 + C4C6
0
-C2( C4C5S6 + S4C6 )+ S2S5S6 -S2( C4C5 S6+ S4C6 )- C2S5S6
-S4C5S6 + C4C6
0
C2C4S5 + S2C5 S2C4S5 - C2C5
3.4 欧拉变换的逆运动学解 (Inverse solution of Euler Angles )
由前节知欧拉变换为
Euler (ø, θ,ψ) = Rot (z, ø) Rot (y, θ) Rot (z,ψ)
我们用T来表示欧拉变换的结果,即
T = Euler (ø, θ,ψ)
机器人技术基础实验报告
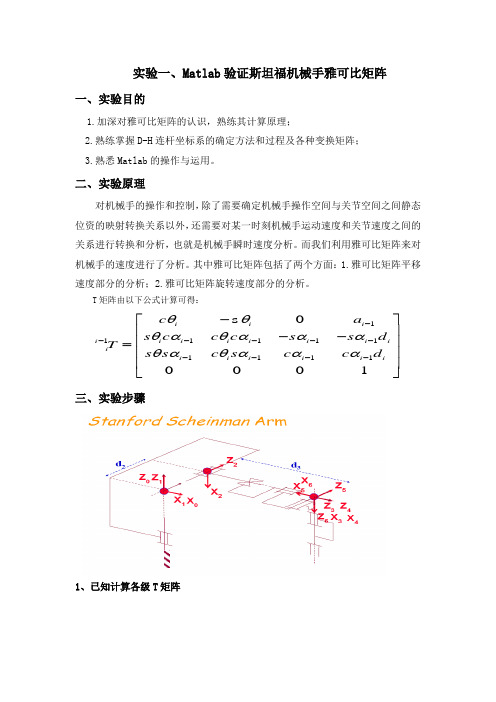
实验一、Matlab 验证斯坦福机械手雅可比矩阵 一、实验目的1.加深对雅可比矩阵的认识,熟练其计算原理;2.熟练掌握D-H 连杆坐标系的确定方法和过程及各种变换矩阵;3.熟悉Matlab 的操作与运用。
二、实验原理对机械手的操作和控制,除了需要确定机械手操作空间与关节空间之间静态位资的映射转换关系以外,还需要对某一时刻机械手运动速度和关节速度之间的关系进行转换和分析,也就是机械手瞬时速度分析。
而我们利用雅可比矩阵来对机械手的速度进行了分析。
其中雅可比矩阵包括了两个方面:1.雅可比矩阵平移速度部分的分析;2.雅可比矩阵旋转速度部分的分析。
T 矩阵由以下公式计算可得:1111111111s 0001iii i i i i i i i i ii i i i i i c a s c c c s s d T s s c s c c d θθθαθαααθαθααα-----------⎡⎤⎢⎥--⎢⎥=⎢⎥⎢⎥⎣⎦三、实验步骤1、已知计算各级T 矩阵665544445436546655221132210321220000000010001000000000100001000100011000000000100101000001001---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦--⎡⎤⎡⎤⎢⎥⎢⎥--⎢⎥⎢⎥===⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦-c s c s c s s c T T T s c s c c s c s d d T T T s c 1100001001⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦s c 2、计算出各连杆坐标系到基坐标系0的变换矩阵:11110111212112112121121022221211213212121121321203222000000001010010000000100-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦----⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥==⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦---+++=-可知可知c s s c T z c c c s s s d s s c s s c c d c T z s c c c s c s c d s s d s c c s s s d s c d T s c c d 12123320010⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦可知c s s s z c 1241412414121231212414124141212312042424223124141251241451251241412312124145050001()()()----⎡⎤⎢⎥+-++⎢⎥=⎢⎥-⎢⎥⎣⎦--------+-=++c c c s s c c s s c c s c s d s d s c c c s s c s c c s s s s d c d T s c s s c c d c c c s s c s s c c c s s s c s c c c s s c c s d s d s c c c s c s T 12512414512512414123122423124514512512312124514512512312062455223()2452524525000112345600⎡⎤⎢⎥-+--+--+++⎢⎥⎢⎥-⎢⎥⎣⎦-+-++++=-s s s c c c s s s s c s c s c c s s d c d s c c c s s c s c c s s c d X X c c c s s s s c s c c s d s d X X s c c s c s s s s c s s d c d T X X s c s c c c d 01⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦Matlab 计算过程如下:>> clear>> syms c1 s1 c2 s2 c3 s3 c4 s4 c5 s5 c6 s6 d1 d2 d3 d4 d5 d6 a1 a2 a3 a4 a5 a6>> T10=[c1 -s1 0 0;s1 c1 0 0;0 0 1 0;0 0 0 1]>> T21=[c2 -s2 0 0;0 0 1 d2;-s2 -c2 0 0;0 0 0 1] >> T32=[1 0 0 0;0 0 -1 -d3;0 1 0 0;0 0 0 1] >> T43=[c4 -s4 0 0;s4 c4 0 0;0 0 1 0;0 0 0 1] >> T54=[c5 -s5 0 0;0 0 1 0; -s5 -c5 0 0;0 0 0 1] >> T65=[c6 -s6 0 0;0 0 -1 0;s6 c6 0 0;0 0 0 1]>> T20=T10*T21; >> T30=T20*T32; >> T40=T30*T43; >> T50=T40*T54; >> T60=T50*T65;>> T60=simplify(T60)3、用速度矢量合成的方法计算雅可比矩阵Jv 部分:356124123456102040506016263465666124561020162631245600000⎡⎤=⎢⎥⎢⎥⎣⎦⎡⎤⨯⨯⨯⨯⨯=⎢⎥⎣⎦⎡⎤⨯⨯=⎢⎥⎣⎦v v v v v v J J J J J J J J J J J J J z p z p z z p z p z p z z z z z z p z p z z z z z z ωωωωωω 1) 计算1016⨯z p1z 为连杆1坐标系的z 轴单位向量在基坐标系0中的描述;16p 为连杆1坐标系原点到连杆6坐标系原点连线矢量16O O,在基坐标系0中的描述,计算过程为:计算矩阵T61,T61的第四列即为16O O,由于坐标系1相对于坐标系0有绕Z 轴的转动,故需要对其进行转换,转换方法为;0116O O ⋅ R ,01R为T10中旋转部分注:Matlab 中向量叉积方法:e=cross (a,b)>> T61=T21*T32*T43*T54*T65 %计算出16O O在坐标系1中的描述>> P161=[s2*d3;d2;c2*d3]>> Rot10=[c1 -s1 0;s1 c1 0;0 0 1] %由T10知道旋转部分变换3*3矩阵 >> P160= Rot10* P161 % 与P60最后一列比较 >> z1=[0;0;1]>> e=cross(z1,P160) %可得到Jv 第一列: e =[ -s1*s2*d3-c1*d2; c1*s2*d3-s1*d2;0]2) 计算2026⨯z p2z 为连杆2坐标系的z 轴单位向量在基坐标系0中的描述;206p 为连杆2坐标系原点到连杆6坐标系原点连线矢量26O O,在基坐标系0中的描述,计算过程为:计算矩阵P62,P62的第四列即为26O O,由于坐标系2相对于坐标系0有姿态变化,故需要对其进行转换,转换方法为;0226O O ⋅ R ,02R为T20中旋转部分注:Matlab 中向量叉积方法:e=cross (a,b)>> T62= T32*T43*T54*T65 %计算出26O O在坐标系2中的描述>> P262=[0;-d3;0]>> Rot20=[c1*c2 -c1*s2 -s1;s1*c2 -s1*s2 c1;-s2 -c2 0] %由T20知旋转部分变换3*3矩阵>> P260= Rot20* P262 >> z2=[-s1;c1;0]>> e=cross(z2, P260) %可得到Jv 第一列:e =[c1*c2*d3; s1*c2*d3; -s1^2*s2*d3-c1^2*s2*d3]3) 由于连杆3坐标系为移动坐标系,故起对连杆6的速度贡献不能计算为3036⨯z p ,而应该为Z3的单位向量在基坐标系0中的表示;故由T30直接可得Jv 第三列为:1212320⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦c s s s z c4)由于坐标系4、5、6和坐标系6的坐标原点重合故对应6066)=⨯=⨯ i i ()q(q i i O i i i v z O O z p 的计算结果均为0 ,于是可得 35612412345612123123121212312312232112414124141245145125112414124141245000000000000⎡⎤=⎢⎥⎢⎥⎣⎦---+-=------+-+-++v v v v v v J J J J J J J J J J J J J c d s s d c c d c s s d c s d s c d s s s d c s c c s s c c c s s c c c c s s s s c s c c s c s c c s c s c c s c c s c ωωωωωω14512524242455210⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥-+⎢⎥⎣⎦s s s s c s s s s s c s c c 5) 用直接求导的方法验证上面Jv 的计算的正确性:在matlab 中用B=jacobian(f,v)方法直接求导可以获取雅可比矩阵四、实验总结机器人雅可比矩阵能够很好地反映出操作空间与关节空间的速度映射关系,而Matlab 则很好的简化了这种关系求导手段。
机器人学基础实验报告

实验报告——机器人运动学实验一、基本理论本实验以SCARA 四自由度机械臂为例研究机器人的运动学问题.机器人运动学问题包括运动学方程的表示,运动学方程的正解、反解等,这些是研究机器人动力学和机器人控制的重要基础,也是开放式机器人系统轨迹规划的重要基础。
机械臂杆件链的最末端是机器人工作的末端执行器(或者机械手),末端执行器的位姿是机器人运动学研究的目标,对于位姿的描述常有两种方法:关节坐标空间法和直角坐标空间法。
关节坐标空间:末端执行器的位姿直接由各个关节的坐标来确定,所有关节变量构成一个关节矢量,关节矢量构成的空间称为关节坐标空间。
图1-1是GRB400机械臂的关节坐标空间的定义。
因为关节坐标是机器人运动控制直接可以操纵的,因此这种描述对于运动控制是非常直接的。
直角坐标空间:机器人末端的位臵和方位也可用所在的直角坐标空间的坐标及方位角来描述,当描述机器人的操作任务时,对于使用者来讲采用直角坐标更为直观和方便(如图1-2)。
当机器人末端执行器的关节坐标给定时,求解其在直角坐标系中的坐标就是正向运动学求解(运动学正解)问题;反之,当末端执行器在直角坐标系中的坐标给定时求出对应的关节坐标就是机器人运动学逆解(运动学反解)问题。
运动学反解问题相对难度较大,但在机器人控制中占有重要的地位。
图1-1 机器人的关节坐标空间 图1-2 机器人的直角坐标空间法机器人逆运动学求解问题包括解的存在性、唯一性及解法三个问题。
存在性:至少存在一组关节变量来产生期望的末端执行器位姿,如果给定末端执行器位臵在工作空间外,则解不存在。
唯一性:对于给定的位姿,仅有一组关节变量来产生希望的机器人位姿。
机器人运动学逆解的数目决定于关节数目、连杆参数和关节变量的活动范围。
通常按照最短行程的准则来选择最优解,尽量使每个关节的移动量最小。
解法:逆运动学的解法有封闭解法和数值解法两种。
在末端位姿已知的情况下,封闭解法可以给出每个关节变量的数学函数表达式;数值解法则使用递推算法给出关节变量的具体数值,速度快、效率高,便于实时控制。
机器人的逆运动学名词解释

机器人的逆运动学名词解释机器人的逆向运动学是,已知末端的位置和姿态,以及所有连杆的几何参数下,求解关节的位置。
二、两大类求解逆运动学的方法逆运动学求解通常有两大类方法:解析法、数值法。
1.解析法(Analytical Solution)特点:运算速度快(达到us级),通用性差,可以分为代数法与几何法进行求解。
串联机械臂有逆运动学解析解的充分条件是满足Pieper准则。
即如果机器人满足两个充分条件中的一个,就会得到封闭解,这两个条件是:•三个相邻关节轴相交于一点;•三个相邻关节轴相互平行。
现在的大多数商品化的工业机器人在设计构型时,都会尽可能满足满足Pieper准则,因为解析法求解能够很快的使用较少的算力,使用较低成本的控制器就能求解,之后随着芯片算力的提升,感觉在未来,机器人公司也会在是否采用满足解析解的构型和采用特定构型并开发对应的逆解算法之间找一个平衡。
以PUMA560机器人为例,它的最后3个关节轴相交于一点。
我们运用Pieper方法解出它的封闭解。
对于UR5机械臂,其第2、第3、第4关节轴平行,满足Pieper准则其中的一条,即三个相邻的关节轴两两平行。
2.数值法(Numerical Solution)特点:通用性高,但是求解速度较慢(ms级)。
除了一些特殊的机械臂构型外,机械臂逆运动学问题很难用解析解求解,因此在许多情况下会使用数值解求解。
通常设定一个优化目标函数,是把逆解求解问题转化为一个优化问题求数值解。
Newton-Raphson(NR)是数值解的一种方法。
它需要基本的雅可比矩阵。
然而,当且仅当原始方程的函数具有逆函数,且原始方程可解时,NR方法才会成功。
从运动学的角度来看,前一个条件意味着机器人需要非冗余,机器人在从初始配置到最终配置的运动过程中不通过奇异点。
后一个条件意味着机械臂的期望位置和方向需要在机器人的工作空间内,是可解的。
由于这些限制,NR方法不能保证全局收敛性,因此它在很大程度上取决于初始值。
机器人运动学正解逆解课件

在机器人力控制中,需要知道每个关节的角度变化来调整 机器人的姿态和力矩。逆解可以用于求解每个关节的角度 变化,从而调整机器人的姿态和力矩。
机器人定位
在机器人定位中,需要知道每个关节的角度变化来调整机 器人的位置和姿态。逆解可以用于求解每个关节的角度变 化,从而调整机器人的位置和姿态。
04
实现复杂运动轨迹
利用运动学正解与逆解,可以规划出 复杂的运动轨迹,满足各种应用需求 。
02
机器人运动学正解
正解的基本概念
正解是指机器人末端执行器从某一初 始位置和姿态到达目标位置和姿态所 需经过的关节角度值。
正解是机器人运动学中的基本问题, 是实现机器人精确控制和自主导航的 基础。
正解的求解方法
逆解的求解方法
01
代数法
通过建立机器人关节角度与目标点坐标之间的方程组,利用数学软件求
解方程组得到关节角度。这种方法适用于简单的机器人结构,但对于复
杂机器人结构求解过程可能较为繁琐。
02
数值法
通过迭代或搜索的方法,不断逼近目标点坐标,最终得到满足要求的关
节角度。这种方法适用于复杂机器人结构,但求解时间较长且可能存在
机器人运动学正解逆解课件
目 录
• 机器人运动学概述 • 机器人运动学正解 • 机器人运动学逆解 • 机器人运动学正逆解的对比与联系 • 机器人运动学正逆解的实例分析
01
机器人运动学概述
定义与分类
定义
机器人运动学是研究机器人末端 执行器位姿与关节变量之间的关 系的学科。
分类
根据机器人的结构和运动特性, 可以分为串联机器人和并联机器 人。
局部最优解。
03
解析法
通过几何学和代数学的方法,直接求解关节角度与目标点坐标之间的关
机械设计基础机器人运动学和逆运动学
机械设计基础机器人运动学和逆运动学机器人技术一直是工业自动化领域的重要组成部分。
了解机器人的运动学和逆运动学是机械设计师的基本技能之一。
本文将介绍机器人运动学和逆运动学的基本概念和计算方法。
一、机器人运动学机器人运动学是研究机器人运动的学科。
它主要关注机器人的位置、速度和加速度等运动状态。
机器人的运动学可以分为正运动学和逆运动学两个方面。
正运动学是根据机器人的关节角度计算末端执行器(例如机械臂末端的工具)的位置、速度和加速度。
正运动学通常采用变换矩阵的方法进行计算。
变换矩阵是描述坐标系之间变换关系的数学工具,可以将机器人的关节角度转化为末端执行器的位置。
逆运动学与正运动学相反,它通过给定末端执行器的位置,计算机器人各个关节的角度。
逆运动学也是机器人控制中的关键问题,因为在很多应用中,我们更希望直接控制机器人的末端位置而不是关节角度。
二、机器人运动学的计算方法机器人运动学的计算方法主要包括几何法和代数法。
几何法是一种直观的计算方法,它根据机器人各个链节的长度和关节角度,通过几何关系计算末端执行器的位置。
这个计算过程类似于通过三角函数计算一个三角形的边长。
几何法的优点是容易理解和使用,但是对于复杂的机器人结构和多自由度机器人,几何法的计算可能会变得非常复杂。
代数法则通过变换矩阵的乘法来计算机器人的运动学,相较于几何法,代数法更具有通用性和灵活性。
代数法的关键是构建机器人的正运动学和逆运动学的解析解。
解析解的计算通常基于一些代数求解的方法,例如向量法、四元数法等。
三、机器人逆运动学的解析解和数值解在机器人逆运动学的计算中,如果能够得到解析解,那么可以直接得到机器人各个关节的角度。
然而,对于大部分机器人而言,解析解可能并不存在,或者过于复杂而难以计算。
这时我们可以用数值方法来近似计算逆运动学。
数值解通常采用迭代的方法来计算。
具体来说,我们可以通过给定初始角度,计算得到末端执行器的位置,然后调整关节角度,再次计算末端位置,不断迭代,直到达到所需的位置精度。
《机器人导论》机器人逆运动学
行器有两种可能的方位,在工作空间的边界上只能一种可能的方位。
第四章: 操作臂逆运动学 4.2 可解性
当一个操作臂少于6自由度时,它在三维空间内不能达到 全部位姿. ---操作臂的工作空间是一个子空间. ---更简单的操作臂的工作空间是这个子空间的子集.
对于少于6个自由度的操作臂来说,给定一个确定的一般 目标坐标系,什么是最近的可达目标坐标系?
4 4 1800 5 5 6 6 1800
由于关节运动的限制, 这8个解中的某些解是不能实现的.
第四章: 操作臂逆运动学 4.2 可解性
通常,连杆的非零参数越多,达到某一特定目标的方式也越多. 以一个具有6个旋转关节的操作臂为例,解的最大数目与等于零的连 杆长度参数的数目相关。非零参数越多,解的最大数目就越大.
3. 通过化简为多项式的代数解法 万能公式:
u tan
2
,
cos
1 u2 1 u2
,
sin
2u 1 u2
,
tan sin 2 1 cos
第四章: 操作臂逆运动学 4.3 代数解法和几何解法
例子: 求解超越方程 acos bsin c 的 .
利用:
Then we have:
1
平面内的角度是可以相加的,因此三个连杆的角度之和即为最后一个连杆 的姿态:
1 2 3 This equation is solved for 3 to complete our solution.
第四章: 操作臂逆运动学 4.3 代数解法和几何解法
y
x2 y2
0
02T
x x2 y2
0
机器人正运动学和逆运动学
i
αi-1
ai-1
di
θi
•
•
3.1.5 PUMA 560型机器人运动学方程 12..确确定定各D-连H杆坐D标-H系参数和关1234节αadiii-=-1变1沿==量绕沿ααZ0023iXX轴ii--1,1从轴轴--9900X,,从00从° °i°°-1ZZ到ii--11X到到i的ZZdd00i24距i的的离角距;度离θθθθ31(;24;(-((990000°°°°))
3. 机器人正逆运动学
本章主要内容
机器人运动学研究的问题: 机器人末端在空间的运动与各个关节的运动之间
的关系。
3.1 机器人正运动学方程 3.2 机器人逆运动学方程
3.1 机器人正运动学方程
• 定义:
– 描述机器人末端相对于绝对坐标系或基座坐标 系的位置姿态的数学表达式
• 运动学方程的模型:
•
M f (qi )
3 L2 0
0
θ3 i 绕Zi轴, 从Xi1旋转到Xi的角度;
3.1.4操作臂运动学方程
目的:求出相邻连杆间的坐标
变换的形式,进一步求出连杆
T i 1 i
{R}
{P}
(n相1)对推于导连过杆0程的:位置和姿态。
{Q}
1.坐标系{i-1}相对于坐标系{i}的变换是由连杆四个参数构成
的函数,其中只有一个变量。
坐标系(笛卡尔坐标系)中的位置和姿态就能描述出来。
0 N
T(q1
,
q2
,
, qN
)
01T(q1)12T(q2 )
N
1 N
T(qN
)
0N00R0
0
PN 1
0
《 机器人技术基础》(实验指导书)

《机器人技术基础》实验指导书实验一、机器人关节空间轨迹的多项式插值一、实验目的和要求1.熟悉关节空间轨迹的多项式插值方法;2.了解关节空间轨迹的插值计算和笛卡尔空间路径轨迹规划的区别; 3.根据关节空间轨迹的要求编程实现轨迹规划。
4.熟练Matlab 语言编程。
二、实验仪器和设备PC 机一台(含“Matlab ”软件)、USB 数据采集卡、37针通信线1根、16芯数据排线、USB 接口线。
三、实验原理机器人作业路径点通常由工具坐标系{T}相对于工作坐标系{S)的位姿来表示,因此,在关节空间中进行轨迹规划:首先需要将每个作业路径点向关节空间变换,即用逆运动学方法把路径点转换成关节角度值,或称关节路径点;然后,为每个关节相应的关节路径点拟合光滑函数;这些关节函数分别描述了机器人各关节从起始点开始,依次通过路径点,最后到达某目标点的运动轨迹。
由于每个关节在相应路径段运行的时间相同,这样就保证了所有关节都将同时到达路径点和目标点,从而也保证了工具坐标系在各路径点具有预期的位姿。
设关节在t 0=0时刻的值是起始关节角度0θ,在终止时刻f t 的值是终止关节角度θf 。
运动轨迹的描述,可用经过起始点关节角度与终止点关节角度的一个平滑插值函数()θt 来表显然,有许多平滑函数可作为关节插值函数。
1. 线性插值如图1,关节空间线性插值的轨迹函数可以表示为:()00=+−f ft t t θθθθ (1)线性插值相比其他插值方式,具有简单、方便的特点。
图1线性函数插值图单纯线性插值会导致起始点和终止点的关节运动速度不连续,这意味着会产生无穷大的加速度,将给两端点造成刚性冲击,因此可以考虑分别在起点和终点处的邻域内增加一段抛物线的“缓冲区段”,即用抛物线与直线连接起来。
2.用抛物线过渡的线性插值如图2所示。
设两端的抛物线轨迹具有相同的持续时间a t ,具有大小相同而符号相反的恒加速度θ。
对于这种路径规划存在有多个解,其轨迹不唯一。
《机器人导论》机器人逆运动学解析

围的函数.
例子: PUMA 到达一个确定目标有8个不同的解. 图中给出了其中的4个 解.它们对于末端手部运动来说具有相同的位姿。对于图中所示的每一个
解存在另外一种解,
其中最后三个关节变为另外一种位形:
4 1800 4 5 5 6 1800 6
由于关节运动的限制,
第四章: 操作臂逆运动学 4.1 概述
求解运动方程时,可以从 0 T 开始求解。 6 根据式:
0 6 1 2 3 4 5 T 0 T T 3T 4T 5T 6T 1 2
两边同时乘 01T 1 ,
有: 0 T 1 0 T 1 T2 T 3T 4 T 5T 1 6 2 3 4 5 6
由此求解 1 ;
第四章: 操作臂逆运动学 4.2 可解性
B 例: 试着描述三连杆操作臂 W T 的子空间. 利用连杆参数求得操作臂的运动学方程为:
c s B WT 0 0
s c 0 0
x c123 0 y s123 0 1 0 0 1 0 0
第四章: 操作臂逆运动学 4.1 概述 逆运动学: 已知工具坐标系相对于工作台坐标系的期望位置
和姿态,计算一系列满足期望要求的关节角
为求出要求的关节角以放置相对于工作台坐标系{S}的工
具坐标系{T},可将这个问题分为两部分: • 首先,进行坐标变换求出相对于基坐标系{B}的腕部坐标 系 {W}. • 应用逆运动学求关节角.
与线性方程组不同,非线性方程组没有通用的求解方法,
我们把操作臂的全部求解方法分成两大类: 封闭解: 封闭解是指基于解析形式的算法,或者指对于不
高于四次的多项式不用迭代便可完全求解。可将封闭解的
求解方法分为两类:代数解法和几何解法. 数值解法: 数值解具有迭代性质,所以比封闭解法的求解
机器人运动学的正逆问题
机器人运动学的正逆问题1.引言在机器人学领域,机器人运动学是一门研究机器人运动的学科,它涉及到机器人的几何形态、运动学模型以及正逆运动学问题等内容。
本文将介绍机器人运动学中的正逆问题,并对其背景、定义、求解方法和应用等方面进行探讨。
2.正逆问题的背景机器人是现代工业生产的重要组成部分,在制造、物流、医疗等领域发挥着重要的作用。
而机器人的运动控制是实现各种任务的基础。
机器人运动学的正逆问题是解决机器人运动控制的关键之一。
正问题:给定机器人的关节角度,求解机器人末端执行器的位置和姿态。
正问题的解决能够帮助我们确定机器人在特定关节空间下的位置和姿态,这对于实现特定运动任务非常重要。
逆问题:给定机器人末端执行器的位置和姿态,求解机器人的关节角度。
逆问题的解决能够帮助我们实现机器人在特定位置和姿态下的运动,从而实现特定任务。
3.正逆问题的定义正问题的定义:给定机器人的关节角度,求机器人的正运动学模型以及末端执行器的位置和姿态。
逆问题的定义:给定机器人的正运动学模型以及末端执行器的位置和姿态,求机器人的关节角度。
4.正逆问题的求解方法4.1正运动学求解方法机器人的正运动学问题可以通过以下几种方法来求解:解析法-:通过几何和三角学方法,推导机器人的正运动学模型,并求解关节角度与末端执行器的位置和姿态之间的关系。
几何法-:利用几何构图和几何关系,将机器人的运动转化为几何问题,从而求解机器人的位置和姿态。
数值法-:通过迭代方法,计算机数值求解机器人的正运动学问题。
4.2逆运动学求解方法机器人的逆运动学问题可以通过以下几种方法来求解:解析法-:通过解析推导,建立关节角度与机器人末端执行器的位置和姿态之间的关系方程,从而求解关节角度。
迭代法-:利用迭代方法,反复逼近机器人的关节角度,使其末端执行器的位置和姿态接近给定值。
数值法-:通过数值优化算法,寻找机器人的关节角度使其末端执行器的位置和姿态与给定值最为接近。
5.正逆问题的应用机器人运动学的正逆问题在实际应用中具有广泛的应用价值:轨迹规划-:通过求解机器人的逆运动学问题,可以实现机器人末端执行器的轨迹规划,从而实现复杂的运动任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验(3)机器人逆运动学实验
一、实验目的:
1)基于robotics机器人库构建机器人;
2)对构建的机器人进行逆运动学分析;
3)了解和熟悉机器人逆运动学的作用。
二、机器人连杆关系图:
图1 机器人连杆关系图
连杆变换矩阵:
参数含义:
三、基本函数介绍
(1)2连杆机器人实例
图2连杆机器人坐标系1)建立机器人DH参数表
2)根据D-H参数创建机器人连杆对象
3)根据连杆对象,建立机器人
4)观测建立机器人的情况
正运动学函数:
1)正运动学函数的使用
T=two_link.fkine([pi/4 pi/4])
T = 0.0000 -1.0000 0 0.7071
1.0000 0.0000 0 1.7071
0 0 1.0000 0
0 0 0 1.0000
2)观测计算结果的情况,三维显示
two_link.plot([pi/4 pi/4])
3)逆运动学函数
q=two_link.ikine(T,[0 0],[1 1 0 0 0 0])
q =0.7854 0.7854 ikine 函数的参数说明:
Q = R.ikine(T, Q0, M, OPTIONS)
Q0为求解的初始值;
M 为自由度数,也就是有运动关节,对应有关节的为1。
(2)对于六自由度机器人求解的逆解,以puma560为例。
1)函数ikine6s
使用方法Q = R.ikine6s(T, CONFIG) 其中T 为机器人位姿矩阵。
CONFIG 为臂型
'l' arm to the left (default) 'r' arm to the right 'u' elbow up (default) 'd' elbow down
'n' wrist not flipped (default)
'f' wrist flipped (rotated by 180 deg)
X
Y
Z
2)puma560实例
>> mdl_puma560 >>qn qn =
0 0.7854 3.1416 0 0.7854 0 >> T = p560.fkine(qn) T =
-0.0000 0.0000 1.0000 0.5963 -0.0000 1.0000 -0.0000 -0.1501 -1.0000 -0.0000 -0.0000 -0.0144 0 0 0 1.0000
>>qi = p560.ikine6s(T) qi =
2.6486 -
3.9270 0.0940 2.5326 0.9743 0.3734
>>qi = p560.ikine6s(T,’ru ’)
qi = -0.0000 0.7854 3.1416 0.0000 0.7854 -0.0000 >>p560.plot(qi)
X
Y
Z
六、实验内容
(1)用机器人库建立下图的机器人,并且求解和显示下面几种情况讨论平面3
自由度机器人的姿态逆运动学解。
并用机器人库求解给定0
H T 的前提下,求解平
面机器人的关节角度。
1)复习机器人逆解的代数求解方法,见P83-86页,尝试用matlab 编写平面3R 求解过程。
2)当1
009010000100001⎡⎤⎢⎥
⎢
⎥=⎢⎥
⎢⎥
⎣⎦0
H T ,
0.50.86607.53730.8660.60 3.926600100001-⎡⎤
⎢⎥
⎢⎥=⎢⎥
⎢
⎥
⎣⎦
0H T ,
0.8660.50 3.12450.50.86609.167400100001-⎡⎤
⎢⎥⎢⎥=⎢⎥
⎢⎥⎣⎦
0H T 条件下的3R 机器人的关节角度。
(2)根据机器人库提供过得puma560—6自由度工业机器人模型,进行一下逆运动分析:
Puma-560机器人
1)T=p560.fkine(q),其中q=[0 0.7854 3.1416 0 0.7854 0]时,调用逆解函数,求出该情况下所有的解。
并且用机器人plot函数画出计算前后的机器人图形,对比观测结果,分析情况。
2)T=p560.fkine(q),q = [0 pi/4 pi 0.1 0 0.2]时,调用逆解函数,求出该情况下所有的解。
并且用机器人plot函数画出计算前后的机器人图形,
对比观测结果,分析情况。