线性矩阵不等式
《鲁棒控制》-6-线性矩阵不等式

(≤ 0)
为线性矩阵不等式(LMI)。
当存在实向量 x ,使得 F ( x) < 0(≤ 0) ,则称 LMI F ( x) < 0(≤ 0) 可行或存在可
行解。
LMI 的可行解全体构成一凸集。
令 X 是一实对称矩阵,对于任意给定实数矩阵 A 和实对称矩阵 Q ,则矩阵
不等式
AT X + XA + Q < 0
⎢ ⎣
0
⎡I ⎢⎣0
−S12 I
S −1 22
⎤ ⎥ ⎦
⎡ ⎢⎣
S11 S21
S12 S22
⎤ ⎥⎦
⎡I ⎢⎣0
−S12 I
S −1 22
⎤T ⎥ ⎦
0
⎤
S22
−
S21S1−11S12
⎥ ⎦
=
⎡ ⎢
S11
⎣
−
S12
S −1 22
S21
S21
0 ⎤⎡ I
S22
⎥ ⎦
⎢⎣−
S −1 22
S
21
0⎤
I
⎥ ⎦
x (t ) = Ax (t ) + Bu (t ) y (t ) = Cx (t ) + Du (t )
假设 D + DT > 0 。 令
H (s) = C (sI − )A −1 B + D
系统无源(passive): 当 x (0) = 0 时,
∫T 0
uT
(t
)y
(t
)
dt
≥
0
● 系统无源 iff
ALQ
⎤ ⎥
⎥
0 ⎥<0
#
⎥ ⎥
线性矩阵不等式及其在随机控制中的应用
Ab t a t A n r a e rfr ltd a o v x叩 一 s r c : u e o t t o lmsf m t h si c n ml h o y c n b omuae sc n e O i a p r h o c t e
W ANG i g Z P n , HANG e g li Ch n —e
(col f l t n f m t nadC no E g er gSadn steo Igt nut ,nn205 ,h a Sho oEe r i I o ao n ot l ni en ,hnog ntu fjh IdsyJ a 533 C i ) co cn r i r n i I it r i n
文章编号 :04 4 8 (07 0 —0 1 —0 10 — 2020 ) 1 08 3
线 性 矩 阵不等 式及 其在 随机 控 制 中的应 用
王 平, 张成 磊
( 山东轻工业学 院 电子信息与控制工程学院 , …东 济南 205 ) 533
摘要 : 随机控制理论 中许多重要的问题 , 都可转化为线性矩阵不等式 (M ) L I约束 的凸优化 问题 , 而使其在数值 上 从 易于求解 。本文阐述 了线性矩阵不等式 方法的基本概念和内容 , 并介绍 了有关算法 及计算 软件 , 举例说 明其 最后
问题本 身是有 解 的 , 找 不 出问 题 的解 。这 给 实 际 也
() 1的决策变 量 。 F
已知的实对称阵。显然 F ) ( 是变量 各元素的仿
射 函数 , 外 式 () 味着 F( 是 一 个 负定 矩 阵 , 另 1意 ) 即对 所有 的非零 向量 H , ( u< ∈ u’ ) 0或 F( F ) 的最 大特 征 值 小 于 零 。所 有 满 足 线 性 矩 阵 不 等 式
线性矩阵不等式
7.4.2线性矩阵不等式的确定
LMI工具箱可以处理具有以下一般形式的线性 矩阵不等式。 NTL(X1,…,Xk)N<MTR(X1,…,XK)M 其中:X1…,XK是具有一定结构的矩阵变量, 左、右外因子N和M是具有相同维数的给定矩 阵,左、右内因子L(﹒)和R(﹒)是具有相 同块结构的对称块矩阵。 注意,在线性矩阵不等式的描述中,左边总是 指不等式较小的一边,例如对线性矩阵不等式 X>0,X称为是不等式的右边,0称为是不等式 的左边,常表示成0< X。
I F T ( x) F ( x) F ( x) I 0 0 F ( x) I
T 2
因此,可以通过求解:
min x,
(7.3.2)
I F T ( x) s.t 0 F ( x) I
来得到所求问题的解。显然,问题(7.3.2)是一个具有线性矩阵不等式约束的线性目标函数 的最优化问题。
定的常数矩阵。由于
DED 1 1 D T E T D T DED 1 1
E T DT DE DT D
ET XE X 0
1 T 其中 X D D0 。因此,使得 DED 1 成立的对角矩阵 D 的存在性问题等价
于线性矩阵不等式 E XE X 0 的可行性问题。
要确定一个线性矩阵不等式系统,需要做以下两步: 给出每个矩阵变量X1,…,XK的维数和结构; 描述每一个线性矩阵不等式中各个项的内容。 这个过程产生所描述线性矩阵不等式系统的一个内部 表示,它以一个单一向量的形式储存在计算机内,通 常用一个名字,例如lmisys来表示。该内部表示lmisys 可以在后面处理这个线性矩阵不等式时调用。 下面将通过LMI工具箱中的一个例子来说明线性矩阵不 等式系统的确定。运行lmidem可以看到这个例子的完 整描述。
控制论常用的矩阵不等式

控制论常用的矩阵不等式控制论是一门研究如何通过控制手段来实现系统稳定、优化和鲁棒性的学科,而矩阵不等式则是控制论中常用的数学工具之一。
本文将介绍控制论中常用的几种矩阵不等式,并讨论其在控制系统设计中的应用。
1. 线性矩阵不等式(LMI)线性矩阵不等式是控制论中最常用的矩阵不等式之一。
它的形式为:$$A(x)X+B(x)Y+C^{T}(x)YC(x)<0$$其中,$A(x)$、$B(x)$、$C(x)$均为实系数矩阵函数,$X$、$Y$均为矩阵变量。
该不等式表示的是矩阵函数$A(x)$、$B(x)$、$C(x)$构成的线性系统对应的闭环系统是渐进稳定的,即对任意的初值$x_0$,系统的输出$y(t)$都会收敛到零。
2. Lyapunov矩阵不等式Lyapunov矩阵不等式是控制论中另一种常用的矩阵不等式。
它的形式为:$$A^{T}P+PA<-Q$$其中,$A$为系统的状态转移矩阵,$P$为对称正定矩阵,$Q$为对称正定矩阵。
该不等式表示的是系统的Lyapunov函数$V(x)=x^{T}Px$满足$V(x)leqslant-alpha x^{T}x$,其中$alpha$是正常数。
3. Riccati矩阵不等式Riccati矩阵不等式也是控制论中常用的矩阵不等式之一。
它的形式为:$$A^{T}P+PA-PBR^{-1}B^{T}P<-Q$$其中,$A$、$B$为系统的状态转移矩阵和输入矩阵,$P$为对称正定矩阵,$R$为对称正定矩阵。
该不等式表示的是系统的最优控制输入满足线性方程$u=-R^{-1}B^{T}Px$。
4. Schur矩阵不等式Schur矩阵不等式是控制论中最基本的矩阵不等式之一。
它的形式为:$$Mprec N$$其中,$M$、$N$为两个对称矩阵,$prec$表示矩阵的部分序。
该不等式表示的是矩阵$N-M$是正定的。
总之,矩阵不等式在控制论中具有广泛的应用,可以用于系统稳定性分析、最优控制设计和鲁棒性分析等领域。
线性矩阵不等式2
应用Schur 补,即得定理3.3成立。
y w
2 2
即得闭环系统(3-3)的L2增益小于γ。 再由
V x yT y 2wT w 0
知,当闭环系统(3-3)满足H∞性能指标γ时, V x 0.
定理得证。
Question
为什么考虑零初始条件?若非零初始 条件,系统H∞性能指标不满足。 V x 0 的证明太过牵强。
(3-3)
y Cx
A = A BK MF t E1 E2 K 系统(3-2)的L2 增益定义为:
Tyw s
sup
w 2 0
y w
2 2
定理3.2 针对闭环系统(3-3)和给定的一个常数γ >0,若 存在对称矩阵P>0,使得如下矩阵不等式成立
AT P PA C T C DT P PD 0 2 I
M , E1 和 E 2
是反映不确定性结构的常数矩阵,
。
F t 是时变的不确定矩阵,且满足 F T t F t I
设计状态反馈控制律
ห้องสมุดไป่ตู้
u t Kx t
闭环系统可写为 x A BK MF t E1 E 2 K x Dw = Ax + Dw
记X=γP CT T D 0 I
AT X XA XB BT X 2 I C D
CT T D 0 I
线性矩阵不等式3

定理4-5 对于给定的LMI区域圆盘D(q,r),如果存在对 称正定矩阵X,使得如下不等式成立
可得矩阵A是D-稳定的(必要性的证明请见书 第102页) 。定理得证。
D稳定性定理的应用
一、 LMI区域为左半开复平面
对于左半开复平面,其特征函数是 f D s s s
则
M D A, X 1 AX 1 XAT AX XAT
由D稳定性定理,可得,矩阵A的所有特征值均在 左半开复平面的充分必要条件是存在对称正定矩阵 X,使得 AX XAT 0 Lyapunov不等式
E1 E2 K X 0
Y+MFE+ETFTMT<0 Y+εMMT+ε-1ETE<0
不等式两边分别数乘ε, 并记 V X ,W KV 得
rV MM T qV VAT W T BT 0 T rV E1V E2W E1V E2W qV AV BW
x A + A x B + B u y Cx
不确定参数矩阵 A B MF t E1 E2
M , E1 和 E 2
(4-3)
是反映不确定性结构的常数矩阵,
。
F t 是时变的不确定矩阵,且满足 F T t F t I
应用Kronecker乘积的性质,可得
1.1 A A 2. A B C D AC BD
1 A A; A B C D AC BD
1 v M A, X 1 v 1 v L X M AX M L v Xv M v AXv M v Xv L + M + M
LMI(线性矩阵不等式)工具箱介绍学习

LMI:Linear Matrix Inequality,就是线性矩阵不等式。
在Matlab当中,我们可以采用图形界面的lmiedit命令,来调用GUI接口,但是我认为采用程序的方式更方便(也因为我不懂这个lmiedit的GUI)。
对于LMI Lab,其中有三种求解器(solver): feasp,mincx和gevp。
每个求解器针对不同的问题:feasp:解决可行性问题(feasibility problem),例如:A(x)<B(x)。
mincx:在线性矩阵不等式的限制下解决最小化问题(Minimization of a linear objective under LMI constraints),例如最小化c'x,在限制条件A(x) < B(x)下。
gevp:解决广义特征值最小化问题。
例如:最小化lambda,在0<B(x),A(x)<lamba*B(x)限制条件下。
要解决一个LMI问题,首要的就是要把线性矩阵不等式表示出来。
对于以下类型的任意的LMI问题N' * L(X1, . . . , XK) * N < M' * R(X1, . . . , XK) * M其中X1, . . . , XK是结构已经事先确定的矩阵变量。
左侧和右侧的外部因子(outer factors)N和M是给定的具有相同维数的矩阵。
左侧和右侧的内部因子(inner factors)L(.)和R(.)是具有相同结构的对称块矩阵。
每一个块由X1, . . . , XK以及它们的转置组合而成形成的。
解决LMI问题的步骤有两个:1、定义维数以及每一个矩阵的结构,也就是定义X1, . . . , XK。
2、描述每一个LMI的每一项内容(Describe the term content of each LMI)此处介绍两个术语:矩阵变量(Matrix Variables):例如你要求解X满足A(x)<B(x),那么X就叫做矩阵变量。
LMI线性矩阵不等式
对解的最优性不感兴趣,只是希望找到一个解,它可能不 唯一。
Example 2. 确 定 线 性 系 统 的 稳 定 性 :
考虑一个自治线性系统
x ˙ = Ax
那么,用于证明该系统稳定 性(Re{λi(A)} < 0, ∀i)的Lyapunov LMI问题,就是寻
7
找P > 0,使得
AT P + P A > 0
3
而正常情形下,我们看到的变量x是由一个或多个矩阵组 成,这些矩阵的列在不等式(4)中被堆砌成为一个向量, 即:
F (x) = F (X1, X2, · · · , Xn)
(5)
其中,Xi ∈ R
q i × pi
∑n 是一个矩阵,而 i=1 qi × pi = m,所有矩
阵变量的列堆叠起来,形成单个向量变量x。 于是我们考虑下面常用形式的函数:
(14)
这是一个关于变量P > 0的LMI可行性问题,然而,给定满 足该问题的任意的P > 0,明显地集合 { } P = βP : 标量β > 0 中任意矩阵都满足上述问题。
P > 0和(14)所描述的LMI约束,可以等价地组成一个LMI:
(15)
AT P + P A 0 0
8
<0
(16)
考虑一个自治线性系统xax那么用于证明该系统稳定性reia0?i的lyapunovlmi问题就是寻7找p0使得atppa014这是一个关于变量p0的lmi可行性问题然而给定满足该问题的任意的p0明显地集合pp
航空航天飞行器控制、制导与导 航
线性矩阵不等式
Linear matrix inequality(LMI): 矩阵变量集合中线性(或仿
LMI线性矩阵不等式工具箱
LMI:Linear Matrix Inequality,就是线性矩阵不等式。
在Matlab当中,我们可以采用图形界面的lmiedit命令,来调用GUI接口,但是我认为采用程序的方式更方便(也因为我不懂这个lmiedit的GUI)。
对于LMI Lab,其中有三种求解器(solver):feasp,mincx和gevp。
每个求解器针对不同的问题:feasp:解决可行性问题(feasibility problem),例如:A(x)<B(x)。
mincx:在线性矩阵不等式的限制下解决最小化问题(Minimization of a linear objective under LMI constraints),例如最小化c'x,在限制条件A(x) < B(x)下。
gevp:解决广义特征值最小化问题。
例如:最小化lambda,在0<B(x),A(x)<lamba*B(x)限制条件下。
要解决一个LMI问题,首要的就是要把线性矩阵不等式表示出来。
对于以下类型的任意的LMI问题N' * L(X1, . . . , XK) * N < M' * R(X1, . . . , XK) * M其中X1, . . . , XK是结构已经事先确定的矩阵变量。
左侧和右侧的外部因子(outer factors)N和M是给定的具有相同维数的矩阵。
左侧和右侧的内部因子(inner factors)L(.)和R(.)是具有相同结构的对称块矩阵。
每一个块由X1, . . . , XK以及它们的转置组合而成形成的。
解决LMI问题的步骤有两个:1、定义维数以及每一个矩阵的结构,也就是定义X1, . . . , XK。
2、描述每一个LMI的每一项内容(Describe the term content of each LMI)此处介绍两个术语:矩阵变量(Matrix Variables):例如你要求解X满足A(x)<B(x),那么X就叫做矩阵变量。
LMI线性矩阵不等式培训讲学

(5)
其中,Xi
∈
Rqi×pi
是一个矩阵,而∑n i=1
qi
×
pi
=
m,所有矩
阵变量的列堆叠起来,形成单个向量变量x。
于是我们考虑下面常用形式的函数:
F (X1, X2, · · · , Xn) = F0 + G1X1H1 + G2X2H2 + · · · + GnXnHn
4
∑n
= F0 + GiXiHi
7
找P > 0,使得
AT P + P A > 0
(14)
这是一个关于变量P > 0的LMI可行性问题,然而,给定满
足该问题的任意的P > 0,明显地集合
P
=
{
βP
:
标量β
>
}
0
(15)
中任意矩阵都满足上述问题。
P > 0和(14)所描述的LMI约束,可以等价地组成一个LMI:
AT P + P A 0 < 0
9
%可行 ( 是稳定的A) 当且仅当 tmin<0
tmin
运行结果:
Lyap = 1
Solver for LMI f e a s i b i l i t y problems L ( x ) < R( x ) 10
This solver minimizes t subject to L( x ) < R( x ) + t∗I
The best value o f t should be negative for f e a s i b i l i t y
Iteration :
线性矩阵不等式的LMI工具箱求解
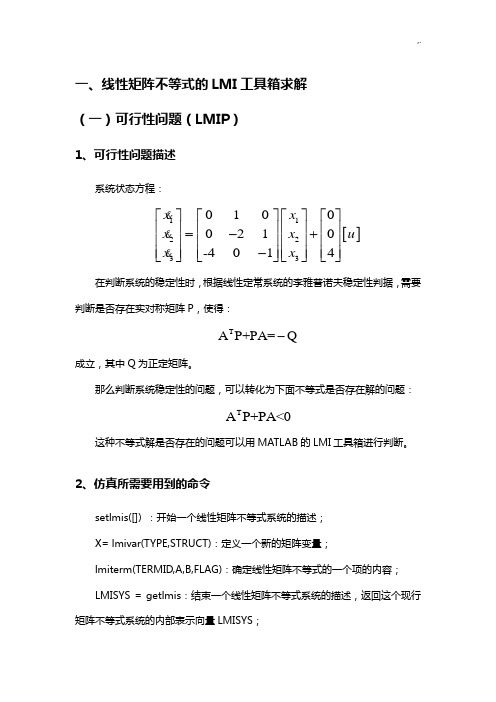
一、线性矩阵不等式的LMI 工具箱求解 (一)可行性问题(LMIP )1、可行性问题描述系统状态方程:[]11223301000210-414x x x x u x x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦&&& 在判断系统的稳定性时,根据线性定常系统的李雅普诺夫稳定性判据,需要判断是否存在实对称矩阵P ,使得:T A P+PA=Q -成立,其中Q 为正定矩阵。
那么判断系统稳定性的问题,可以转化为下面不等式是否存在解的问题:T A P+PA<0这种不等式解是否存在的问题可以用MATLAB 的LMI 工具箱进行判断。
2、仿真所需要用到的命令setlmis([]) :开始一个线性矩阵不等式系统的描述; X= lmivar(TYPE,STRUCT):定义一个新的矩阵变量;lmiterm(TERMID,A,B,FLAG):确定线性矩阵不等式的一个项的内容; LMISYS = getlmis :结束一个线性矩阵不等式系统的描述,返回这个现行矩阵不等式系统的内部表示向量LMISYS ;X = dec2mat(LMISYS,DECVARS,XID):由给定的决策变量得到相应的矩阵变量值。
[tmin,xfeas]=feasp(lmisys):可行性问题的求解器函数,tmin大于0时,表明LMI系统不可行,P阵无解,系统不稳定,tmin小于0时,便可以用dec2mat 函数求解出P矩阵。
3、仿真结果可以看到,仿真结果tmin<0,因此P阵存在,系统是稳定的。
进一步用dec2mat 函数求解出P 矩阵。
得:(二)特征值问题(EVP)1、EVP 问题描述该问题对应矩阵工具箱中的LMI 约束的线性目标函数最小化优化问题。
一般采用mincx 求解器求解。
考虑这样一个优化问题:min ().. 0TTTrace X s t A X XA XBB X Q +++<其中:5342154067; 3; 562.78314228A B Q -⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪===-- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪---⎝⎭⎝⎭⎝⎭2、仿真用到的命令DECVARS = mat2dec(LMISYS,X1,X2,X3,...) :由给定的矩阵变量得到相应的决策变量值;[copt,xopt]=mincx(LMIs,c,options):用于给定的特征值问题求解,copt 返回全局最优的决策变量,xopt 返回决策变量的最优解。
线性矩阵不等式(LMI)的 MATLAB求解
线性矩阵不等式(LMI)的 MATLAB 求解©
作者:dynamic
Sky 时间:2008.12.10
版权:All Rights Reserved By
★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★
b 一、LMI 工具箱概述 ..................................................................................................................................................6 a 1.系统描述 ...........................................................................................................................................................6
对lmi变量的操作dec2matmat2dec将求解器的输出转化为矩阵变量值通过给定的矩阵变量值返回决策向量3lmifeaspmincxdefcxgevpevallmishowlmidellmidelmvarsetmvarma4lmi结果验证与修改5lmi系统信息的提取decinfodecnbrlmiinfolminbrmntnbr以决策变量的形式表示每个输入的矩阵变量得到决策变量的个数查询现存lmi系统的信息得到问题中lmi的个数得到问题中矩阵变量的个数tlab验证lmi的可行性lmi限制下线性目标的极小值在mincx命令中第一ctx目标lmi限制下的广义特征值最小化由决策变量的给定值来验证所有的变量项返回一个已经评估的lmi的左右边从系统中删除一个lmi从问题中移除一个矩阵变量将一个矩阵变量赋予指定值ky三lmi工具箱函数详解1
线性矩阵不等式及其在控制工程中的应用(1)

1 引 言
在过去的 10 余年内 ,由于线性矩阵不等式 (L M I) 的优良性质以及解法的突破 ,使其在控制 系统分析和设计方面得到了广泛的重视和应用 。 在此之前 ,绝大多数的控制问题都是通过 Riccati 方程或其不等式的方法来解决的[1~3 ] 。但是解 Riccati 方程或其不等式时 ,有大量的参数和正定 对称矩阵需要预先调整 。有时 ,即使问题本身是 有解的 ,也找不出问题的解 。这给实际应用问题 的解决带来极大不便 ,而线性矩阵不等式方法可 以很好地弥补 Riccati 方程 方 法 的 上 述 不 足[4 ] 。 在解线性矩阵不等式时 ,不需要预先调整任何参 数和正定对称矩阵 。本文对 L M I 在控制工程中 的发展和现状进行简要的回顾 ,着重讨论 L M I 在 不确定控制系统中的应用研究成果以及展望 。
表 1 基于 LMI 方法的各种控制与滤波问题
序号
系统描述
采用方法
文献
1
不确定线性系统和非线性系统的状 基于 L M I 转化为凸优化问题求得鲁棒界 ;对于非
[14 ]
态反馈以及输出反馈表述
线性如 L urie 系统则通过 L yapunov 函数方法得到
[15 ]
系统稳定的 L M I 判定准则
摘 要 : 介绍了线性矩阵不等式的基本概念和用于求解线性矩阵不等式的软件工具 箱 Matlablmi 的 3 个求解器 ,对线性矩阵不等式在控制系统中的应用作了详细的综述 。分 析了其在当前的两个研究热点 ,即不确定系统的鲁棒控制与鲁棒滤波中的运用 。同时探 讨了时滞系统与非线性系统的研究现状 。然后列举了一些具有代表性的采用 L M I 求解控 制问题的最新结果 。为了说明线性矩阵不等式的求解过程 ,给出了一个保性能控制的例 子 ,在 Matlab 513 编辑器中运行程序 ,得到的结果是最优性能指标值 , copt = J 3 101677 7 。 关 键 词 : 线性矩阵不等式 ;时滞 ;凸优化 ;L M I 工具箱 中图分类号 : TP 13 文献标识码 : A
线性矩阵不等式

线性矩阵不等式是一种数学关系,它可以用来描述矩阵之间的线性关系。
它把一个矩阵的元素和另一个矩阵的元素比较,以表达它们之间的线性关系。
它可以用来比较两个矩阵之间的差异,也可以用来比较两个矩阵之间的相似度。
线性矩阵不等式的具体形式是:A,B两个矩阵,其中A和B的元素之间的比较关系可以写成a_ij ≤ b_ij,其中i表示A矩阵的行号,j表示A矩阵的列号,a_ij表示A矩阵第i行第j列的元素,b_ij表示B矩阵第i行第j列的元素。
线性矩阵不等式的应用非常广泛,它可以用来求解矩阵的最大值和最小值,可以用来解决线性规划问题,也可以用来求解矩阵的最优解。
总之,它是一种重要的数学工具,在线性代数中有着重要的应用。
离散代数riccati方程 lmi

离散代数riccati方程 lmi离散代数Riccati方程与LMI引言离散代数Riccati方程(Discrete Algebraic Riccati Equation)是控制论和系统科学中的一个重要问题。
它可以通过线性矩阵不等式(Linear Matrix Inequality,LMI)来表示和求解。
在本文中,我们将介绍离散代数Riccati方程与LMI之间的关系,探讨其应用和解决方法。
离散代数Riccati方程简介离散代数Riccati方程是一类特殊的代数方程,形式如下:X=A T XA−A T XB(R+B T XB)−1B T XA+Q其中,X是未知矩阵,A和B是已知矩阵,Q和R是给定的对称矩阵。
Riccati方程的求解对于控制系统的稳定性和性能分析具有重要意义。
线性矩阵不等式(LMI)线性矩阵不等式是描述矩阵约束条件的不等式。
LMI的一般形式如下:F(X)≼0其中,X 是待求矩阵,F (X ) 是关于 X 的线性函数。
LMI 的解集合可以表示为一组矩阵的集合。
Riccati 方程与LMI 的关系Riccati 方程和LMI 之间存在紧密的关系。
事实上,离散代数Riccati 方程可以转化为一个LMI 问题。
通过引入新的变量和约束,可以将Riccati 方程重新表述为LMI 形式,进而可以使用现有的LMI 求解方法来求解Riccati 方程。
具体而言,我们定义下面的矩阵和变量:X =[X 11X 12X 21X 22], Z =[X 11X 12X 21X 22]T F (X )=[X 11−A T X 11A +Q X 11A −X 12+A T X 21⋆X 22−R] 其中,⋆ 表示可以任意取值的元素。
通过对矩阵 F (X ) 的约束条件进行推导和求解,可以得到Riccati 方程的解。
Riccati 方程的求解方法Riccati 方程是一个重要的非线性方程,其求解是一个复杂的问题。
线性矩阵不等式在控制工程中的应用
线性矩阵不等式在控制工程中的应用线性矩阵不等式(Linear Matrix Inequality,简称LMI)是一种常见且重要的数学工具,它在控制工程领域中得到广泛应用。
本文将着重介绍LMI的基本概念、应用场景以及在控制工程中的具体应用。
一、LMI的基本概念LMI是一种线性约束条件下的矩阵不等式,一般形式为:P > 0(表示矩阵P是正定的),或F(A, B, C) > 0(表示关于矩阵A、B、C的函数F大于零)。
LMI的解集是所有满足该矩阵不等式条件的矩阵组成的集合。
LMI问题通常可以通过利用凸优化方法进行求解。
二、LMI的应用场景LMI广泛应用于控制工程领域,其中最主要的应用场景包括:1. 系统稳定性分析与设计:通过构建LMI来分析系统的稳定性,并设计稳定控制器,以确保系统在不同工况下具有良好的稳定性。
2. 鲁棒控制设计:在存在不确定性或测量噪声的情况下,通过LMI技术设计鲁棒控制器,使系统具有鲁棒性能。
3. 最优控制设计:通过最小化LMI问题的目标函数,优化控制设计,实现系统的最优性能。
4. 过程控制与优化:利用LMI技术设计控制器,通过对系统的状态变量、输入变量进行优化,实现过程控制与优化。
5. 非线性控制器设计:通过线性化方法将非线性系统线性化,并将其表示为LMI形式,从而设计出最优的线性控制器。
三、LMI在控制工程中的具体应用1. 鲁棒控制:对于具有不确定性的系统,通过建立LMI,设计鲁棒控制器,以提高系统的稳定性和鲁棒性能。
2. H∞控制:利用LMI方法设计H∞控制器,使系统对不确定性和噪声具有良好的鲁棒性能,同时最小化系统对外界干扰的敏感度。
3. 状态反馈控制:通过LMI技术设计状态反馈控制器,实现系统状态的稳定性和快速响应。
4. 参数估计:利用LMI方法设计参数估计器,对系统的未知参数进行在线估计,以提高系统的自适应性能。
5. 面向网络控制系统的设计:通过LMI技术,设计满足网络控制系统带宽约束的控制器,以保证系统的稳定性和性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
则应用引理 2.1.2,可以将矩阵不等式(2.1.6)的可行性问题转化成一个等价的矩阵不等 式
AT P PA Q PB
BT P
R0
(2.1.7)
的可行性问题,而后者是一个关于矩阵变量P的线性矩阵不等式。
2.3一些标准的线性矩阵不等式问题
例2.1.1 稳定性问题 考虑线性自治系统
x(t) Ax(t)
setlmis([]) X=lmivar(1,[61]) S=lmivar(1,[20;21]) ﹪lst LMI lmiterm([111x],1,A,’s’) lmiterm([111s],c’,c) lmiterm([112x],1,B) lmiterm([122s],-1,1) ﹪2nd LMI lmiterm([-211X],1,1) ﹪3rd LMI lmiterm([-311s],1,1) lmiterm([3110],1) lmisys=getlmis
m 是一组给定的实对称矩阵,(2.1.1)中的不等号“<”指的是矩阵 F(x)是负定的,即对所有
非零的向量 v Rm , vT F (x)v0 或者 F(x)的最大特征值小于零。
在许多系统与控制问题问题中,问题的变量是以矩阵的形式出现的。例如 Lyapunov 矩阵 不等式:
F ( X ) AT X XA Q0
lmivar 函数lmivar用来描述出现在线性矩阵不等式系
统中的矩阵变量,每一次只能描述一个矩阵变 量。矩阵变量的描述包括该矩阵变量的结构。 该函数的一般表达是:
X=lmivar(type,struct) 这一函数定义了一个新的矩阵变量X。函数中
的第一个输入量type确定了矩阵变量X的类型, 第二个输入量struct进一步根据变量X的类型给 出该变量的结构。变量的类型分成三类:
阵值函数。由于
max(F (x)) F T (x)F (x) 2I 0
根据矩阵的 Schur 补性质,
F
T
(
x)F
(
x)
2
I
0
I F ( x)
FT (x)
I
0
因此,可以通过求解:
min
x ,
(2.2.4)
I FT (x)
s.t F ( x)
I
0
来得到所求问题的解。显然,问题(2.2.4)是一个具有线性矩阵不等式约束的线性目标函数 的最优化问题。
,
)
CX
I
D
BT
DT I
称为内因子。外因子可以不是一个正方矩阵,它在许多问题中常常不出现。
● X 和 是问题的矩阵变量。注意,标量也可以看成是一个 1×1 维的矩阵。 ● 内因子 L(X, )是一个对称块矩阵。根据对称性,L(X, )可以由对角线及
其上方的块矩阵完全确定。
● L(X, )中的每一块都是矩阵变量 X 和 的仿射函数。这一函数由常数项和变量
(2.2.3)
的渐近稳定性问题,其中 A Rnn 。Lyapunov 稳定性理论告诉我们:这个系统渐近
稳定的当且仅当存在一个对称矩阵 X Rnn 使得 X 0 , AT X XA0 。因此系统
(2.2.3)的渐近稳定性问题等价于线性矩阵不等式
的可行性问题。
X
0
0
AT X XA0
例 2.2.2 分析问题 在 分析中,通常要求确定一个对角矩阵 D,使得 DED1 1,其中 E 是一个给
其中:函数lmivar定义了两个矩阵 变量X和S,lmiterm则描述了每一 个线性矩阵不等式中各项的内容。 getlmis回到了这个线性矩阵不等 式系统的内部表示lmisys,lmisys 也称为是储存在机器内部的线性 矩阵不等式系统的名称。以下将 详细介绍这几个函数的功能和用 法。
setlmis和getlmis 一个线性矩阵不等式系统的描述以setlmis开始,以
LMI工具箱提供了确定、处理和数值求解线性矩阵不等式的一些工 具,它们主要用于:
● 以自然块矩阵形式来直接描述线性矩阵不等式; ● 获取关于现有的线性矩阵不等式系统的信息; ● 修改现有的线性矩阵不等式系统; ● 求解3个一般的线性矩阵不等式问题; ● 验证结果。 本附录将详细介绍LMI工具箱所提供的用于解决以上各个问题的有
表示 2×2 维的单位矩阵。 可以应用 lmivar 来定义这些矩阵变量:
setlmis([]) X1=lmivar(1,[3 1]) X2=lmivar(2,[2 4]) X3=lmivar(1,[5 1;1 0;2 0])
lmiterm
在确定了矩阵变量之后,还需要确定每一个线性矩阵不等式中各 项的内容。线性矩阵不等式的项指构成这个线性矩阵不等式的块 矩阵中的求和项。这些项可以分成三类:
Type=1:对称块对角结构。这种结构对应于具有以下形式的矩阵变量:
D1 0 0
0
D2
0
0
0
Dr
其中对角线上的每一个矩阵块 Dj 是方阵,它可以是零矩阵、对称矩阵或数量矩阵。这种结 构也包含了通常意义的对称矩阵和数量矩阵(分别相当于只有一块)。此时,struct 是一个
r×2 维的矩阵。如果该矩阵的第 i 行是(m,n)则其中的 m 表示对称矩阵块 Di 的阶数, 而 n 只能取 1、0 或-1。其中 n=1 表示 Di 是一个满的对称矩阵(或无结构的对称矩阵);n=0 表示 Di 是一个数量矩阵;n= -1 表示 Di 是一个零矩阵。 Type=2:长方型结构。这种结构对应于任意的长方矩阵。此时,struct=(m,n)表示矩阵的维 数。
Fk (x)0 同时成立当且仅 F (x)0 。因此,一个线性矩阵不等式系统也可以用一个单一的线性
矩阵不等式来表示。
2、 在许多一些非线性矩阵不等式转化成线性矩阵不等式的问题中,我们常常用到矩阵的
Schur 补性质。考虑一个矩阵 S Rnn ,并将 S 进行分块:
S
S11 S21
S12
S22
getlmis结束。当要确定一个新的系统时,输入: setlmis([]) 如果需要将一个线性矩阵不等式添加到一个名为lmiso
的现有的线性矩阵不等式系统中,则输入: setlmis(lmiso) 当线性矩阵不等式系统被完全确定好后,输入:
lmisys=getlmis 该命令返回这个线性矩阵不等式系统的内部表示lmisys。
Type=3:其他结构。这种结构用来描述更加复杂的矩阵,也可以用于描述矩阵变量之 间的一些关联。X 的每一个元或者是 0,或者是±Xn,其中 Xn 是第 n 个决策变量。相应地, struct 是一个和变量 X 有相同维数的矩阵,其中的每一个元取值如下:
0, 如果 X(i,j)=0 struct(i,j)= n, 如果 X(i,j)= Xn
项这两类基本项组成,其中常数项就是常数矩阵或以一些常数矩阵组成的算术表达式,例如
L(X, )中的 B 和 D;变量项是包含一个矩阵变量的项,例如 XA、- I 等。
一个线性矩阵不等式不论多么复杂,都可以通过描述其中每一块的各项内容来确定这个
线性矩阵不等式。
2.4.2线性矩阵不等式的确定
LMI工具箱可以处理具有以下一般形式的线性矩阵不等 式。
其中的 S11 是 r×r 维的。假定 S11 是非奇异的,则 S11 S21S111S12 称为 S11 在 S 中的 Schur
补。以下引理给出了矩阵的 Schur 补性质。
引理 2.1.1
对给定的对称矩阵
S
S11 S21
S12 S22
,其中
S11
是
r×r
维的。以下三个条
件是等价的:
(2.1.2)
其中:A, Q Rnn 是给定的常数矩阵,且 Q 是对称的, X Rnn 是对称的未知矩阵变量因
此该矩阵不等式中的变量是一个矩阵。设 E1,E2,…,EM 是 Sn 中的一组基,则对任意对称
M
X Rnn ,存在 x1,x2,…xM,使得 X xi Ei 。 i1
பைடு நூலகம்
因此,
M
M
M
关函数和命令。
2.4.1线性矩阵不等式及相关术语
考虑H∞控制中的一个线性矩阵不等式:
AT X XA XC T B
N
T
CX
I
D
N
0
BT
DT I
其中:A、B、C、D、N 是给定的矩阵,X=XT∈Rn×n 和 ∈R 是问题的变
N 称为外因子,块矩阵
AT X XA XC T B
L(X
系统与控制中的许多问题初看起来不是一个线性矩阵不等式的问题,或不具有(2.1.1) 式的形式,但可通过适当的处理将问题转换成具有(2.1.1)式形式的一个线性矩阵不等式的 问题。下面给出了这方面的一些典型的例子。
1、 多个线性矩阵不等式
F1(x)0,, FK (x)0
称 为 一 个 线 性 矩 阵 不 等 式 系 统 。 引 进 F (x) diagF1(x),,F k (x) , 则 F1(x)0 … ,
-n, 如果 X(i,j)=- Xn
例 A.2.2 考虑具有三个矩阵变量 X1、X2 和 X3 的线性矩阵不等式系统,其中 ● X1 是一个 3×3 维的对称矩阵; ● X2 是一个 2×4 维的长方矩阵;
0 0
● X 3 0 1
0
,其中△是
5×5
维的对称矩阵,δ1
和δ2
是两个标量,I2
0 0 2 I 2
(ⅰ) S 0
(ⅱ) S110, S22 S1T2S111S12 0
(ⅲ)
S 22
0,
S11
S12
S
S 1 T
22 12
0
在一些控制问题中,经常遇到二次型矩阵不等式:
AT P PA PBR 1BT P Q0