架空线路检修机器人设计与研究
架空输电线路巡检机器人
架空输电线路巡检机器人作者:徐东亮来源:《中国新通信》2017年第05期【摘要】随着社会经济的发展,电力系统规模不断扩大,对输电线路安全运行和供电的可靠性要求不断提高。
架空输电线路作为电力系统中的重要环节,其安全稳定运行对保证电网结构和电力系统良好运行有着决定性的作用。
本文重点分析架空输电线路巡检机器人,从其结构、功能、路径规划、障碍物识别等方面进行阐述,挖掘其发展历程。
【关键字】架空输电线路巡检机器人障碍路径规划一、引言随着全球经济高速全面发展,对能源的需求越来越大,超高压大容量电力线路大幅扩建,能源覆盖面越来越广。
架空电力线路是将输电导线用绝缘子和金具架设在杆塔上,使得导线对地面和建筑物保持一定的距离,从而实现远距离的供电。
基于该特点,对于远距离输电大多都会采用架空输电线路。
然而,虽然架空输电线路具有投资小、建设速度快、施工简单方便,但是当其线路输送中容量越大,输送距离就越长,要求线路的电压也就越高,而此时输电线路的阻抗能力逐步成反比,其存在的缺陷也越来越明显,比如易受到风雪和雷击等自然因素的影响,从而容易引发各种安全事故。
因此,随着高压甚至是超高压输电线路的发展,输电线路安全保障性也得到越来越多的关注,输电线路的巡检工作也就越发重要。
目前,架空电力线路的巡检主要分为三类,人工巡检、飞行器巡检以及智能机器人巡检。
随着机器人技术的发展,采用智能化机器人进行电力线路的巡检也逐渐引起关注。
二、电力巡线机器人2.1电力巡线机器人发展在2002年以前,架空输电线路早已出现,架空电力线路的主要巡检方式还是依靠传统的人工巡检和直升机巡检,基于这两种巡检方式,输电线路的安全性能基本能够得到保证。
20世纪80年代末,日本、美国和加拿大等国相继开发了不同用途的巡线机器人,如1988年东京电力公司的Sawada等人研制了具有初步自主越障能力的架空地线巡检移动机器人;1989年美国TRC公司研制了一台悬臂自治巡检机器人,能沿架空线路较长距离地爬行,进行电晕损耗、绝缘子、结合点、压接头等视觉巡检任务,但其不具有越障功能;2004年后,随着发展和需求,线路巡检机器人进行了越障结构、检测以及导航等方面的技术改进。
架空输电线路巡线机器人越障分析及运动学仿真
架空输电线路巡线机器人越障分析及运动学仿真摘要:人工巡检是巡线方法中比较传统的方式,其工作量很大,环境艰苦条,难以满足电网供电可靠性的要求;电力线自动巡检平台通过巡线机器人携带的激光测距雷达对电力线周围的障碍物进行测距,通过摄像机对线路周围环境进行拍摄,将含有安全、异常信息的数据通过无线设备实时传输到基于北斗系统的电塔在线监测系统终端,并由其终端通过北斗通讯送至地面监控站,对线路的运行情况进行判断、分析,以便及时发现和消除隐患。
关键词:巡线机器人;越障;仿真引言在20世纪90年代的时候,我国开始研究巡线机器人,并且获得了一些荣誉成果。
其中典型代表有:武汉大学及其研制的“LineBot”系列巡检机器人,中科院沈阳自动化所及其研制的巡检机器人等。
由于线路巡检机器人具有良好的应用前景和技术特色,所以已成为智能机器人领域的研究热点。
1架空输电线路巡线机器人的研制1.1柔性臂末端和腕关节执行器的支撑是依靠于巡线机器人的机械手臂来实现的。
一般需具有3个以上的自由度才可以保证机器人顺利通过各种障碍物,使机器人可以在输电导线上进行巡线作业。
常用的几种机器人手臂构型如图1所示。
3个自由度的机械手臂手腕构形通常有RRR、RBR、BRR和BBR4种形式,如图2所示。
其中R表示转动结构,B表示弯曲结构。
采用两个弯曲的BBR可以增加结构的尺寸,而RBR比BBR的结构更加紧凑。
为了使机械手臂的结构更加简单、重量更轻,同时可以在平行于避雷线的端面上自由运行,手臂的位置和手臂的姿态各自设置2个自由度,合计4个自由度,如图3所示。
总之柔性臂具有手腕回转、手腕俯仰、大臂回转和小臂俯仰4个自由度,它由大臂、小臂、肘关节、腕关节、肩关节、机座、末端执行器7个部分组成。
由转盘和精密的涡轮蜗杆减速器组成肘关节和肩关节,转盘是由涡轮蜗杆减速器通过电机来带动,使手臂在竖直和水平两个方向都可以实现自如运动。
此外制动装置通过电机的控制,可以使手臂在柔性与刚性之间实现平滑转换,这样机器人就可以跨越线路上各种障碍物,完成巡线工作。
架空电力线路巡检机器人视觉系统的研究的开题报告

架空电力线路巡检机器人视觉系统的研究的开题报告一、研究背景电力系统是现代社会生产生活中必不可少的基础设施之一,而架空电力线路作为电力系统的重要组成部分,具有较为广泛的应用。
然而,由于架空电力线路的高空悬挂和大面积分布,常常会被各种因素影响,如恶劣天气、损坏、老化等,导致线路损坏、跳闸甚至事故的发生。
因此,对架空电力线路进行巡检是保障电力系统正常运行和安全的重要措施之一。
现有的架空电力线路巡检方式主要有人工巡检、直升机巡检和无人机巡检等。
然而,这些巡检方式存在巡检效率低、人工成本高、依赖外界条件等问题。
为此,研发一种基于视觉系统的架空电力线路巡检机器人,可以有效提高巡检效率和准确性,并降低巡检成本,具有重要的研究和应用价值。
二、研究内容和目标本研究旨在设计一种视觉系统辅助的架空电力线路巡检机器人,通过成像技术获取架空电力线路的图像信息,提取相关特征,并建立模型对其进行分析、识别和分类。
主要研究内容包括:1. 架空电力线路图像采集。
采用高分辨率、高灵敏度的成像设备对架空电力线路进行拍摄,获取数码图像信息。
2. 图像预处理和特征提取。
对采集的图像进行处理和预处理,如滤波、二值化、去噪等,提升处理效果和减少噪声干扰。
同时,对处理后的图像提取轮廓、边缘和纹理等特征信息。
3. 图像分析和识别分类。
基于特征提取结果,建立图像特征模型,通过图像识别技术对架空电力线路进行分类和识别。
同时,根据巡检需求,对巡检机器人进行路径规划和控制,实现自动化巡检。
三、研究意义1. 提高电力系统运行效率。
通过视觉系统的辅助,可以提高架空电力线路的巡检效率和准确性,减少故障和停电的发生,保障电力系统正常运行。
2. 降低巡检成本。
与现有的人工巡检、直升机巡检和无人机巡检等方式相比,机器人巡检的成本更低,且更具实用和可操作性。
3. 推动机器人技术和视觉技术的发展。
本研究涉及到机器人和视觉技术等多个领域,可以推动这些领域的技术进步和发展,为未来智能制造和智慧城市等领域的发展提供技术支持。
架空电力线路巡线机器人的研究综述
文章编号 2 2 2架空电力线路巡线机器人的研究综述Ξ张运楚 梁自泽 谭民中国科学院自动化研究所复杂系统与智能科学重点实验室 北京摘要 回顾了国内外架空电力线路巡线机器人的研究现状 分析了几种巡线机器人的结构特点及存在的问题 详细探讨了巡线机器人避障!工作电源及线路故障探测等关键技术 最后 展望了架空线路巡线机器人的发展趋势和应用前景关键词 巡线机器人 架空电力线 故障探测 避障中图分类号 ×° 文献标识码ΜοβιλεΡοβοτφορΟϖερηεαδΠοωερλινεΙνσπεχτιον αΡεϖιεω≠∏ 2 ∏ 2 ×(ΚεψΛαβορατορψοφΧομπλεξΣψστεμσανδΙντελλιγενχεΣχιενχε,ΙνστιτυτεοφΑυτοματιον,ΧηινεσεΑχαδεμψοφΣχιενχεσ,Βειϕινγ ,Χηινα)Αβστραχτ:× √ √ √ × √ ∏ ∏ √ 2 ∏ √ ∏ ∏ ∏ ƒ √ √ √Κεψωορδσ: √ ∏ √1引言(Ιντροδυχτιον)采用高压和超高压架空电力线是长距离输配电力的主要方式 电力线及杆塔附件长期暴露在野外 因受到持续的机械张力!电气闪络!材料老化的影响而产生断股!磨损!腐蚀等损伤 如不及时修复更换 原本微小的破损和缺陷就可能扩大 最终导致严重事故 造成大面积的停电和巨大的经济损失 因此 电力公司要定期对线路设备巡检 及时发现早期损伤和缺陷并加以评估 然后根据缺陷的轻重缓急 以合理的费用和正确的优先顺序 安排必要的维护和修复 从而确保供电可靠性目前 对输电导线进行巡检的方法主要有两种 地面目测法 采用肉眼或望远镜对辖区内的电力线进行观测 由于输电线路分布点多面广!地理条件复杂 巡线工人需要翻山越岭!涉水过河!徒步或驱车巡检 这种方法劳动强度大 工作效率和探测精度低 可靠性差 航测法 直升飞机巡线 直升飞机沿输电线路飞行 工作人员用肉眼或机载摄像设备观测和记录沿线异常点的情况 这种方法尽管距离接近 提高了探测效率和精度 但电力线从观察者或摄录设备的视野中快速通过 增加了技术难度 运行费用较高≈移动机器人技术的发展 为架空电力线路巡检提供了新的移动平台 巡线机器人能够带电工作 以一定的速度沿输电线爬行 并能跨越防震锤!耐张线夹!悬垂线夹!杆塔等障碍 利用携带的传感仪器对杆塔!导线及避雷线!绝缘子!线路金具!线路通道等实施接近检测 代替工人进行电力线路的巡检工作 可以进一步提高巡线的工作效率和巡检精度 因此 巡线机器人成为巡线技术研究的热点2国内外研究现状(Ρεσεαρχηστατυσατηομεανδαβροαδ)巡线机器人的研究始于 世纪 年代末 日本!加拿大!美国等发达国家先后开展了巡线机器人第 卷第 期 年 月机器人 ×∂≥Ξ基金项目 国家 计划资助项目 收稿日期的研究工作 年 东京电力公司的≥ 等人研制了光纤复合架空地线 ° • 巡检移动机器人≈ 如图 所示 该机器人利用一对驱动轮和一对夹持轮沿地线 ° • 爬行 能跨越地线上防震锤!螺旋减震器等障碍物 遇到线塔时 机器人采用仿人攀援机理 先展开携带的弧形手臂 手臂两端勾住线塔两侧的地线 构成一个导轨 然后本体顺着导轨滑到线塔的另一侧待机器人夹持轮抱紧线塔另一侧的地线后 将弧形手臂折叠收起 以备下次使用图 弧形手臂巡线机器人ƒ 2机器人运动控制有粗略和精确定位两种模式粗略控制是把线塔和地线的资料数据 线塔的高度!位置 地线长度 线路上附件数量等 预先编制好程序输入机器人据此控制机器人的行走和越障 精确定位控制则根据传感器反馈信息进行控制机器人携带的损伤探测单元采用涡流分析方法探测光纤复合架空地线 ° • 铠装层的损伤情况并把探测数据记录到磁带上美国× ≤公司 年研制了一台悬臂自治巡线机器人原型≈ 如图 所示 它能沿架空导线长距离爬行 执行电晕损耗!绝缘子!结合点!压接头等视觉检查任务对探测到的线路故障数据预处理后 传送给地面人员 当机器人遇到杆塔时 利用手臂采用仿人攀援的方法从侧面越过杆塔图 × ≤悬臂巡线机器人ƒ × ≤年日本法政大学的 ∏ 等人开发了电气列车馈电电缆巡检机器人≈ 见图机器人采用多关节小车结构和/头部决策 尾部跟随0的仿生控制体系 以 的速度沿电缆平稳爬行 并能跨越分支线!绝缘子等障碍物图 蛇形巡线机器人ƒ ≥ 2机器人由六对左右对称!相互联结的小车组成每个单体小车有两个电机 一个用于行走驱动 另一个用于控制联结前后小车的旋转关节的关节角左机 器 人 年 月右小车采用具有自保安功能的磁锁系统联结 磁锁系统用永久磁铁将左右小车牢牢锁紧 使两车橡胶驱动轮抱住馈电电缆 由行走电机驱动沿电缆平稳爬行当机器人遇到分支线!绝缘子等障碍物时 每对小车上磁锁系统中的电磁铁通电 顺次将磁锁打开 机器人再改变两侧旋转关节的关节角 使左右小车分开 小车依次通过障碍物后 控制两侧旋转关节使左右小车合拢 电磁铁断电 磁锁再次锁紧 机器人恢复正常行走状态图 是泰国 ∏ π √× 2 × ∏ 的≥ ° ∏ ∏ 等人 年设计的一台自给电巡线机器人原型≈ 该机器人采用电流互感器从爬行的电力线路上获取感应电流 作为机器人的工作电源从而解决了巡线机器人长时间驱动的动力问题 并初步实现了根据摄像机图像判断电力线上绝缘子等障碍物位置的视觉导航功能 不过 该试验型巡线机器人仅能在两线塔间的电力线上爬行 无避障能力图 自给电巡线机器人ƒ ≥ 2 ∏由日本≥ 公司生产的电力线损伤探测器也采用了单体小车结构如图 所示图 损伤探测机器人ƒ ⁄它能在地面操作人员的遥控下沿电力线行走 利用车载探测仪器探测线路损伤程度及准确位置 将获取的数据和图片资料存储在数据记录器中 地面工作人员可回放复查进一步确定损伤情况 探测器不具备越障功能 遇到线路附件等障碍物时便自动停止前进 该损伤探测器于 年赢得了≥ ∏2大奖≈加拿大魁北克水电研究院的≥ ∏ 等人 年开始了 ± ∂ 遥控小车 见图的研制工作≈遥控小车起初用于清除电力传输线地线上的积冰 逐渐发展为用于线路巡检!维护等多用途移动平台 第三代原型机结构紧凑 ≅ ≅ 仅重 驱动力大 抗电磁干扰能力强 能爬 β的斜坡 通信距离可达 小车采用灵活的模块化结构 安装不同的工作头即可完成架空线视觉和红外检查!压接头状态评估!导线和地线更换!导线清污和除冰等带电作业 已在工作电流为 的 ∂电力线上进行了多次现场测试 但是 ± ∂ 无越障能力只能在两线塔间的电力线上工作 目前 研究组正在开发具有越障功能的自治移动小车 实验结果表明 新一代 ±∂ 能在无人干预的情况下跨越障碍物 巡检范围达图 ± ∂ 遥控小车ƒ± ∂ 国内关于架空电力线路巡线机器人研究的报道较少 年武汉水利电力大学的吴功平教授研制出了架空高压线路巡线小车小车采用单体三驱动轮结构 具有稳定的行走功能和越障功能 能顺利越过绝缘子!防振锤!悬垂线夹等主要障碍物 并利用携带的近距离红外故障诊断仪完成线路的诊断巡线小车的行走!越障通过人工遥控加机械控制器来实现 目前 该研究组正在进行智能化程度较高!越障能力强的自治巡线机器人的研制工作≈ 中科院第 卷第 期张运楚等 架空电力线路巡线机器人的研究综述沈阳自动化所!中科院自动化所在 基金项目资助下也开展了架空电力线路巡线机器人的研究3巡线机器人的一些关键技术(Κεψτεχη2νολογιεσοφινσπεχτιονροβοτ)从上述国内外已取得的研究成果可以看出 无越障功能的架空电力线路巡线机器人技术较为成熟 已近于实用阶段 如日本≥ !ƒ∏ ∏ 美国 ≤ ≤等公司开发的巡线机器人 这类机器人一般需人工参与 只能完成两线塔之间电力线路的检查 作业范围小 自治程度低 自主巡线机器人能跨越线路附件!线塔等障碍物 实施大范围!长时间的线路巡检作业 但研究进展缓慢3 1机械机构巡线机器人是机电一体化系统 涉及到机构!控制!通信!定位系统!移动平台上传感器的集成和信息融合!电源等 而机械机构是整个系统的基础 也是目前制约巡线机器人发展的技术障碍之一 巡线机器人机械机构的设计要求是∞能在架空高压线上以期望的速度平稳爬行ƒ具有一定的爬坡能力能够避越高压线路上的防震锤!线夹!绝缘子!线塔等障碍在故障情况下有可靠的自保安措施 防止机器人摔落提供足够的空间安装所携带的电源以及探测!记录和分析处理仪器可实现在管线上爬行的机构可以分为步进式爬行机构和轮式爬行机构两类≈ 步进式爬行机构通过多只手臂的交替移动完成爬行 一般用于斜拉桥缆索!管道外壁的检查维护 轮式爬行机构依靠由电机驱动的行走轮与管线之间的摩擦 驱动机器人前进 轮式爬行机构行走平稳 速度快 有利于移动平台上线路探测仪器的可靠工作 因此 目前巡线机器人多采用此类爬行机构越障机构是巡线机器人机构的关键 由于机器人悬挂在架空线上 越障时应保证机器人姿态平稳 并保持与其它导线和线塔金属部件的安全间距 因此设计难度较大 文献≈ 采用了仿人攀援的弧形手臂越障机构 姿态控制较为复杂 文献≈ 中给出的分体蛇形越障机构不适合跨越直径和间距较大的障碍 文献≈ 的越障机构也同样存在跨越间距小的问题 见图巡线机器人越障操作类似人的空中攀援行为 因此 仿生设计是解决这一难题的有效方法 一种很有前景的方案是采用多只可伸缩机械臂结构 机械臂上部为爬行驱动机构 下部通过旋转关节相互链接 遇到障碍时 机械臂之间相互配合 采用仿人攀援策略调整姿态 跨越障碍 由于采用多只多自由度机械臂 机器人可以完成更为复杂的空中姿态调整 因而可跨越各种类型的线路障碍图 小车式巡线机器人机械机构ƒ ∏ ∏ 23 2工作电源要保证巡线机器人在野外大范围内长时间工作 必须提供持续可靠的电源 巡线机器人功率一般为几百瓦 由于受体积和重量的限制 蓄电池组不能满足长时间供电要求 文献≈ 尝试采用小型汽油发电机为机器人供电 但汽油发电机需携带油箱 工作时受环境影响大 可靠性差 由于巡线机器人一般沿大工作电流的电力线爬行 因此 最好能直接从电力线上获取能源 即耦合供电 文献≈ 对采用电流互感器耦合从电力线上获取电源的设计方法进行了深入研究 分析了机器人所需的最大驱动力与其重量的比率!磁芯的截面积!副边线圈匝数等变量的关系 实验结果验证了方案的可行性采用电力线耦合供电虽然解决了巡线机器人长期工作的电源问题 同时也导致机械机构及控制系统的复杂化 这是因为机器人越障时 电流互感器磁芯须从电力线上脱离 需解决磁芯分离机构控制和备用电源切换技术3 3导航及定位技术导航就是规划巡线机器人的行走路径 包括全局路径规划和局部越障规划等≈ 巡线机器人沿架空电力线路爬行 要跨越防震锤!悬垂绝缘子!线夹!杆塔等障碍 行走环境介于结构化和非结构化环境之间 因此导航问题主要为局部越障规划 局部越障规划就是利用环境传感器 如超声传感器!激光测距仪!视觉传感器等 提供机器人周围的局部环境信机器人 年 月息 产生下一时刻机器人位姿信息 由于巡线机器人环境中障碍物反射面较小 基于≤≤⁄摄像机的视觉传感器更适合作为巡线机器人的环境传感器 另外 悬挂在导线上的机器人 由于风力作用和自身姿态调整时中心的偏移会产生摆动 加大了越障控制难度实时确定巡线机器人在作业环境中所处的位置 即机器人定位 对于准确标识线路故障点的位置至关重要 一种方案是采用里程计的相对定位技术 但累积误差较大 在经过的杆塔上贴上路标 也可以解决定位问题3 4通讯技术通讯模块完成基站和巡线机器人之间的双向数据传输 包括来自机器人的实时视频图像!线路探测传感器数据!机器人位姿状态和由地面基站发出的各种遥控命令等 要求具有带宽高!距离远!抗干扰能力强等特点3 5线路损伤探测技术巡线机器人需完成以下的基本巡检任务 ∞杆塔巡视检查 检查杆塔横担!杆塔本体是否损坏!变形!锈蚀!被盗等 ƒ导线及避雷线巡视检查 检查有无锈蚀!断股!损伤等 有无悬挂异物等 绝缘子巡视检查 检查普通和钢化绝缘子有无闪络!裂纹!破碎和烧伤痕迹 检查合成绝缘子有无严重污秽!伞裙开裂 均压环是否松动!歪斜或脱落 线路金具巡视检查 检查金具有无锈蚀或损坏 防震锤有无生锈!脱落等 线路通道检查 检查线路通道内的树木!建筑物等与线路导线之间的距离 巡线机器人需携带必须的探测仪器完成上述探测任务 故障和损伤探测方法有以下几类3 5 1非接触探测方法∞视觉检查 视觉检查是应用最为广泛的线路检查方法 采用高分辨率≤≤⁄摄像机摄取目标图像 实时传输到地面基站或存储下来 由基站操作人员根据图像中导线!绝缘子等设施的外观确定是否损坏 人工复查需对图像逐帧观察 效率较低 采用计算机图象处理技术自动判断线路故障 能快速识别多种故障现象 从而提高了工作效率 ≠ 采用图像处理技术自动评估架空线的腐蚀程度 准确度与熟练技工相同≈视觉检查一般能发现架空线大部分表面故障现象 精度和准确度取决于图像质量 因此 巡线机器人如何自主控制携带的摄像设备 捕捉特定兴趣目标 获取多视角!高清晰度目标图像 有待深入研究ƒ红外探测技术 有些早期故障难以通过视觉检查发现 这可采用红外探测技术加以弥补 当输电导线存在机械故障 如导线断股!绝缘子破损!压接管连接不良等 时 运行过程中故障点附近就会出现局部温升 产生热辐射场 热成像技术 如红外摄像机 是一种广泛用于检测输变电系统局部温升故障的技术 它可以摄取表面温度超过周围环境温度的异常温升点的红外光谱图像 然后根据图像 人工或自动判读可能的故障器件 该方法已成功用于探测架空电力线上早期的发热故障点 使用时 被测点的温度要高于系统环境温度 天气应干燥晴朗 由于红外成像仪受天气环境影响较大 探测精度和准确性不高 对此 ≥ 分析了影响探测质量的各种因素 提出了改进的措施≈吴功平等人≈ 研究了导线破损的红外检测机理和故障信号的特征提取与故障识别的综合判据 开发了一种便携式近距离红外检测与故障诊断仪 采用热释电传感器将故障点热辐射场装换为电压信号 由数据采集系统采集并送至数据存储系统记录 再通过故障诊断软件对数据进行处理来识别故障类型和确定故障发生的位置无线频谱分析 高压传输线系统各种完好部件周围的交变电场通常呈现为均匀的闭合实线 包括一个规则的无害电晕场 架空线路设备的一些故障 如绝缘子处漏电!导线断股!植物生长过于靠近导线等 会导致其周围电离空气层中出现不规则强烈电子活动 这些高频扰动表现为对交变电场闭合曲线的干扰 架空线上不同的故障类型和位置表现为上述干扰信号的形状!强度和位置 因此 对上述情况进行测量和评估 能够提供输电线路异常和故障的线索 根据以上原理 瑞士的 公司研制了名为 架空线故障探测系统 对架空线路早期故障探测具有很高的灵敏度和准确度≈3 5 2接触探测方法∞电涡流探测法电涡流方法能准确探测钢芯铝绞线断股!钢芯腐蚀程度! ° •铠装层损伤等故障 其基本原理是 将激励线圈贴近导线 并通以 交变电流 激励线圈产生交变磁场 使输电线表面产生电涡流 而电涡流又会反过来产生反向磁场作用于测量线圈 从而改变测量线圈的电参数 导致测量线圈阻抗或电压发生变化 当输电线出现断股!破损或严重锈蚀等故障时 会使电涡流发生畸变 根据畸变程度就可提取有关故障缺陷的程度和第 卷第 期张运楚等 架空电力线路巡线机器人的研究综述位置信息≈ƒ电阻测量探测法架空高压线有很多连接器 如压接管 多种因素会导致连接器老化 导致接点处电阻增加 从而产生局部过热 如不及时维护 会增加线路功率损耗 甚至导致导线断裂而引发停电事故 ≥ 公司研制的 微欧姆计≈ 能测量一段带电导线或连接器两端的电阻 将测量值与正常值比较 就可断定该段导线或连接器件的状态 从而发现早期故障 这种方法比红外测量更直接 准确度高 不受电磁辐射!天气!负荷电流的影响如何把多种线路故障探测器集成到巡线机器人移动平台上 运用传感器信息融合技术进一步提高早期故障探测的效率!精度和准确度 提高故障设施剩余寿命的评估质量≈ 是巡线机器人研究的另一个重要目标4展望(Ουτλοοκ)电力公司面临不断增加的电力需求!更高供电可靠性要求和激烈的市场竞争 以可靠性为中心的精确维护策略 ≤ ≤ 2 ≈ 因能保证电力设施工作寿命最大化 已成为共识 对电力设施早期潜在故障的准确发现和正确评估 是成功实现上述策略的关键 巡线机器人应运而生 因而具有广阔的应用前景巡线机器人技术有两个值得关注的趋势多传感巡线机器人随着自治巡线机器人技术的成熟和线路故障探测仪器的小型化 在一台巡线机器人上集成多种线路故障探测仪器将成为可能 这样 机器人可用多种传感器同时扫描线路 运用传感器信息融合技术以更高的分别率和可靠性发现各种类型的早期故障并加以评估 为维护人员实时提供架空电力线设施的工作状态报告分布式多巡线机器人系统多传感巡线机器人固然有其优点 但不可避免会带来体积较大及控制过于复杂的缺点 开发小型单传感巡线机器人 通过多个携带不同线路故障探测器的机器人协调工作 同样也可完成线路巡检任务 由于功能的单一化 可减小机器人体积及功耗 降低了研制难度 同时 多机器人有组织的协作 可使巡线机器人群体产生高性能的智能行为 通过群体间的知识共享和交换 可进一步提高线路故障的探测灵敏度和可靠性参考文献(Ρεφερενχεσ)≈ √ ≈ ° ∞∞∞ 2 ≤ × ⁄ ∏ ≤ ∏ √ 2 ≈≤ ƒ ≥≈ • ≤≤ ⁄∏ • ⁄ εταλ √ 2 √ ≈ ° ∞ ∏≈ ≥ ∏ ∏ ∏ × ≈ ∞∞∞× ° ⁄ √2≈ ¬ √ √ ≈ ∞ •≈ ∏ ≥ ×2 ∏ ∏ ≈ °≤ ∏ ∞ ≤ ∏ ≈≤≈ ∏ ≥ ×2 ≈ °≤ ∏ ∞ ≤ ∏ ∏ ≈≤ ≥ ⁄ ≤ ≥≈ ° ∏ ∏ ≥ °∏ ≤ εταλ ∏ ∏ ≈ × ∞∞∞ ≥ ∏ ≤ ∏ ≥ ≈≤ ≥ ≥• ∏≈ ∏ √ ° × ⁄ ⁄2≈ ∏ ≥ ≤ ≥ ∏ ° ∏ √ √ 2 ≈ ° ∞∞∞ ≤ × ⁄ ∏ ≤ ∏ √ 2 ≈≤ ≤≈ ∏ ≥ ° ∏ × ± ∂ ∏ 2 √ ≈ ° ∞∞∞ ≤ × ⁄ 2 ∏ ≤ ∏ √ 2 ≈≤≈ 吴功平 戴锦春 郭应龙等 具有自动越障功能的高压线巡线小车≈ 水利电力机械≈ 耿欣 周延泽 巡线机器人的爬行方案设计≈ 机器人技术与应用≈ 朱淼水 杨建刚 吴春明 自主式智能系统≈ 杭州 浙江大学出版社≈ ≠ ≥ ∏ ∏ 2 ∏ 2√ ≈ ≤ 2 ∏ ∞ ≤ ∏ ≈≤ 2≈ ≥ √ ∏ 2 ∏ ≈ ° 2 ∞∞∞ ≤ × 2机器人 年 月⁄ ∏ ≤ ∏ √ 2 2 ≈≤ ±∏ ≤≈ 吴功平 戴锦春 郭应龙等 输电导线机械破损的红外检测与故障诊断≈ 仪器仪表学报≈ × ∏ εταλ ∞ ∏ √ 2 ≈ ∞∞∞× ° ⁄ √≈ 梁唯溪 饶贵安 康宜华 高压输电线涡流检机器人的研制≈ 无损检测≈ √ 2 ≥ •≈ √ ⁄ ∏ ° εταλ ≤≥ ∏ 2 ∏ ∏ ≈ ∞∞∞× ° ⁄ √ ≈ √ ⁄ ƒ ≤ εταλ ≤≥ 2 ∏ ≈ ∞∞∞× ° ⁄ √≈ 2 ≤ ≈ ∞∞∞ ≤ × ⁄ ∏ ≤ ∏ √ 2 ≈≤作者简介张运楚 2 男 博士研究生 研究领域 机器人控制 机器视觉梁自泽 2 男 硕士 副研究员 研究领域 机器人控制 电力系统自动化技术谭民 2 男 博士 研究员 博士生导师 研究领域 机器人控制 多机器人系统 系统可靠性及故障诊断上接第 页≈ 贾云得 机器视觉≈ 北京 科学出版社≈ ≥ √ ∂ ° ∂ ≈ 北京 人民邮电出版社≈ ≠ƒ √ ∏ 2 ≈ ∞∞∞ ∏≈ ƒ × ≥ • ≤ ⁄2 √ √ ∏ √ ≈ ° ∞∞∞ ≤ 2 ∏ ≤ 2 ≈≤ ∏√ 2 ∏≈ 郑南宁 计算机视觉与模式识别≈ 北京 国防工业出版社≈ ≥ ∂ ∂ ∏ √∞ ≥≈ ° ≥° ∞≈≤ ≥° ∞ √≈ ∂ ∂ ∏ √ 2 ∞ ≥≈ ° ∞∞∞ ≤ ⁄ ≤ ≤⁄≤ ≈≤ ≥ ⁄≈ × ≥ ≥ εταλ ∏ ≥∞ √ 2 ∏ ≈ ° ∞∞∞ ≤ ∏ ≈≤作者简介江泽民 2 男 博士生 研究领域 计算机视觉 显微操作等第 卷第 期张运楚等 架空电力线路巡线机器人的研究综述。
配电网架空线路树障清除机器人的研制

配电网架空线路树障清除机器人的研制摘要:为了提高配电网线供电可靠性,降低配电网线路对树木放电引起的火灾或者人身触电事故。
本文研制开发了一种安全经济的可在10kV带电线路上实施树障清除的机器人装置,其具有集成化的树木清除模块及行走模块、升降模块,树障清除模块,能适应配电网线路现场树障清除的施工要求,实现自动上下导线并无需高空作业配合。
利用自升降机构,将机器人挂接在导线上,使机器人能沿着导线自由行走至树障区,启动树障清除装置即可对树木进行切割,完成树障清除的目的,可有效降低树木生长对运行线路带来的不利影响。
研发的机器人轻巧便携,在配电网系统中的具有广阔的市场应用前景。
关键词:配电网;树障;机器人0 引言在线路保护区内,威胁到电力线路安全运行的树木,称为“树障”。
树障对线路的安全运行造成较大影响,轻则容易引起线路跳闸,重则可能造成线路断线,更有甚者造成人员伤亡事故。
对树障进行砍伐或修剪是预防树障事故最有效的手段之一,目前普遍采用人工方式,采用人工对树障进行砍伐或修剪存在作业耗时时间长、劳动强度大、人工成本高等问题;对于高度较高的树木进行修剪时,运维人员作业时需要借助高空作业车进行修剪,对于不满足安全距离要求的,还需要安排相关线路停电,不仅存在较大作业安全风险,而且影响了供电可靠性。
随着社会经济的发展,对供电线路安全运行和供电可靠性的要求越来越高,线树矛盾问题也越来越突出,必需有更加有效的解决办法。
低碳环保、碳中和以及可再生能源概念的提出,我国对环境的保护力度越来越大,砍伐树木的审批流程也越加严格,特别是北方地区更为显著。
本文提出了一种利用自牵引卷扬机构,配合机器人顶部绕轴旋转的行走模块,实现机器人自动上线挂线的方法,解决了现有技术中需要人工攀爬或者通过大型工器具辅助安装机器人的问题。
研发的机器人只需挂载在配电网线路的最下相即可,适合10kV配电网各种作业场景,提升了树障清除机器人的应用范围;通过对机器人紧凑化结构设计、外壳绝缘化、电磁兼容优化等工作,研发的机器人适应配电网带电作业,运行安全稳定。
架空输电线路巡检机器人发展研究
135中国设备工程Engineer ing hina C P l ant中国设备工程 2019.10 (下)架空输电与其他输电方式相比,投资较小,建设的速度比较快,在实际的施工中也可以尽快完工,操作方便,但不可忽视的是,在遇到输送量比较大的时候,随着输送距离的增加,对于线路的电压要求也就越高,这个时候的输电线路抗阻能力又相对较小,因此,就会暴露出较多的缺陷,例如:更易受到风雪以及雷击等自然灾害的影响,也会导致较多的安全事故。
输电线路的安全性从发展以来就受到人们的重视,尤其是超高压输电线路的安全性能,所以,对线路进行巡检就显得尤为重要。
当前情况下,我国架空电力线路的巡检主要分为三大类,分别是人工的巡检、智能机器人的巡检以及飞行器的巡检,伴随着时代的进步,机器人技术的发展,在线路巡检中采用智能化的机器人受到越来越多的关注。
1 架空输电线路巡检机器人的概况1.1 架空输电线路巡检机器人的发展架空输电线路在很早就出现了,早期线路巡检主要采用人工巡检,还会使用到直升机巡检,这两种巡检方式使得线路巡检的安全性得到相应的保障。
20世纪80年代末,美国、日本等国家逐渐出现了线路巡检机器人,这是电力行业发展中的里程碑,极大提高了线路巡检的效率和质量,也在很大程度上促进了电力系统的发展。
但早期的线路巡检机器人由于受到技术的限制,在实际应用方面还存在一定的漏洞,在某些方面还达不到相应的标准,2005年以后,随着发展和需求,线路巡检机器人逐渐突破了结构检测、越障模式以及导航等方面的缺陷,不断改进技术,逐渐取得新的进展,推动线路巡检机器人的可持续发展。
随着全球经济的飞速发展,社会的全面进步,大众对于能源的需求也在不断加大,电力资源作为能源的主要组成部分,在人们的生活和工作中占有举足轻重的地位。
超高压大容量电力线路在不断扩建,能源的覆盖面积也在不断加大,对于架空输电线路来说,实现远距离供电已经成为大势所趋,导线对地面和建筑物保持一定的距离,输电线路通过绝缘子架设在杆塔上进行工作,远距离输电具有一定的优势,这种优势使得现代大多数线路输电都采用这种方式。
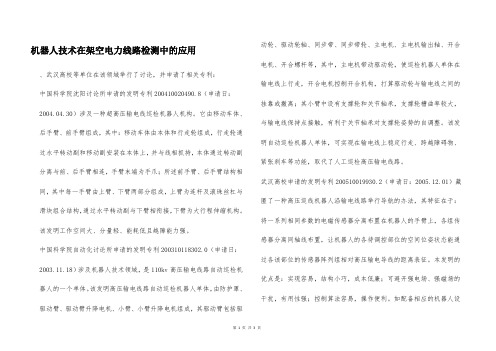
沿地线穿越越障的架空输电线路巡检机器人的

履带式越障
巡检机器人采用履带式结构,通 过履带的滑动实现穿越障碍。该 技术能够适应复杂的地形和障碍 物,但结构相对复杂,控制难度
较大。
跳跃式越障
巡检机器人采用跳跃式结构,通 过机器人的跳跃实现穿越障碍。 该技术能够适应高难度的地形和 障碍物,但结构复杂,控制难度
较大。
越障关键技术
01
02
03
利用深度学习算法对巡检机器人采集的图像进行 分析,识别出障碍物的类型、位置和高度等信息 。
基于强化学习的路径规划算法
利用强化学习算法对巡检机器人进行训练,使其 能够根据障碍物的信息自主规划穿越路径。
3
基于伺服控制的运动控制算法
采用伺服控制系统对巡检机器人的运动进行精确 控制,确保其能够按照规划的路径顺利穿越障碍 。
沿地线穿越越障的架空输电 线路巡检机器人
2023-11-08
目 录
• 引言 • 巡检机器人系统概述 • 越障技术 • 沿地线穿越越障技术 • 实验与测试 • 结论与展望
01
引言
研究背景与意义
电力巡检的重要性
电力巡检是保证电力系统的稳定和安全运行的关键环节。
传统巡检方式的局限性
传统巡检方式存在效率低下、安全隐患等问题,难以满足现代电力 系统的需求。
04
沿地线穿越越障技术
沿地线穿越越障技术原理
基于摩擦传动装置
利用摩擦传动装置,将机 器人与地线紧密结合,实 现机器人的沿地线穿越。
传动装置优化设计
优化设计摩擦传动装置, 提高其传动效率,降低能 量消耗。
越障机构设计
设计越障机构,使机器人 在遇到障碍时能够顺利越 过,提高巡检效率。
沿地线穿越越障关键技术
高压架空输电线路自动巡线机器人的应用探讨

高压架空输电线路自动巡线机器人的应用探讨摘要:高压架空输电线路自动巡线机器人在实际的应用过程中有效的解决了电线路运行维护工作中一些人工无法有效解决的问题,本文主要概述了高压架空输电线路自动巡线机器人主要应用原理以及技术要点。
关键字:高压架空输电线路;自动巡线机器人;应用;高压架空输电线路中大力倡导自动巡线机器人应用,可以有效提高对高压架空输电线路系统的监测与维护,在一定程度上保障了高压架空输电线路的安全运行,提高了电力的稳定性以及整体质量。
一、高压架空输电线路巡检现状在电力系统中关键的核心任务就要要保障电力的高质量以及稳定性。
在电力传输设备中最关键的设备是电力传输设备。
高压输电线路的电力线以及杆塔的配件设施长期在野外中,受到一些机械以及自然因素的影响,造成了材料老化等问题的出现,导致断股、磨损以及腐蚀等损伤现象,如若没有在第一时间上进行更换维修,就可以能导致大面积的停电事故,造成巨大的经济损失。
这也就意味着,对输电线路进行规范化的巡检,保障输电线路的安全性以及稳定性,对于一些存在的风险要及时进行规避,防患于未然。
在传统的电力巡线过程中都是通过人工方法进行检修巡查,工作人员通过人工徒步以及其他方式沿着电力线行走,通过肉眼观测或者利用望远镜等设施对电力线以及配件的运行状态进行外观状态进行观察,工作环境艰苦、检查周期长以及效率低的弊端,同时对工作人员的责任心以及职业道德有着一定的要求,但是很难保障巡检的质量与效率。
二、高压架空输电线路自动巡线机器人的应用探讨(一)高压架空输电线路自动巡线机器人的应用必要性。
高压架空输电线路巡线机器人的发展与研究可以有效的解决在高压架空输电线路中出现的实际问题,提高高压架空输电线路检查的质量和效率。
自动巡线机器人把移动机器人作为载体,通过可见光摄像机、红外热成像仪以及其他的检测仪器作为运行操作系统,利用机器视觉—电磁场—GPS——GIS等信息融合信息构建一个自主移动、巡检的导航系统,把嵌入式计算机控制系统作为开发的硬件平台,在操作过程中有障碍物检测自动识别定位系统、自主规划作业、越障等操作功能,可以对高压架空输电线路进行自主巡检,可以精准的确定线路上的障碍,并对其进行分析。
架空输电线巡线机器人作业场景大尺度三维重建及虚拟交互研究

架空输电线巡线机器人作业场景大尺度三维重建及虚拟交互研究随着科技的不断发展,机器人技术在各个领域得到了广泛应用。
其中,架空输电线巡线机器人作为一种新兴的机器人应用,受到了人们的广泛关注。
架空输电线巡线机器人具有自主巡线、智能感知和高效工作等特点,可以在高压输电线路上进行巡视和检修工作。
本文将探讨架空输电线巡线机器人作业场景下的大尺度三维重建及虚拟交互研究。
在架空输电线巡线机器人的作业场景中,对于输电线路的三维重建至关重要。
通过对输电线路的三维重建,可以实时获取线路的几何形状、杆塔位置和导线走向等信息,为机器人的路径规划和作业提供准确的参考。
因此,如何实现快速而准确的大尺度三维重建成为了研究的重点。
针对这一问题,研究人员提出了一种基于激光雷达和视觉传感器的大尺度三维重建方法。
首先,机器人搭载激光雷达和视觉传感器,通过扫描周围环境获取点云数据和图像数据。
然后,利用点云数据和图像数据进行三维建模和纹理映射,生成真实感强的三维模型。
最后,通过与导线走向信息的匹配,实现对输电线路的几何形状重建。
在大尺度三维重建的基础上,研究人员还提出了一种虚拟交互技术,使得操作人员可以通过虚拟现实设备与机器人进行实时交互。
通过虚拟现实设备,操作人员可以实时观察机器人的工作状态和周围环境,可以进行远程操控和指导。
同时,操作人员还可以在虚拟环境中进行训练和演练,提高工作效率和安全性。
总之,架空输电线巡线机器人作业场景下的大尺度三维重建及虚拟交互研究对于提高机器人的作业效率和准确性具有重要意义。
通过快速而准确的三维重建和实时的虚拟交互,可以有效提升机器人的巡线和检修能力,为电力行业的安全运行提供有力支持。
相信随着技术的不断发展,架空输电线巡线机器人将在未来的电力行业中发挥更加重要的作用。
架空配电线路夹线行走式巡视机器人
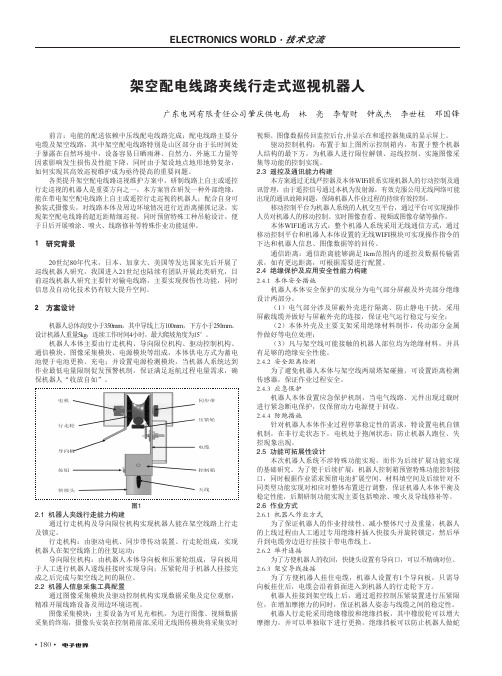
• 180•架空配电线路夹线行走式巡视机器人广东电网有限责任公司肇庆供电局 林 亮 李智财 钟成杰 李世柱 邓国锋前言:电能的配送依赖中压线配电线路完成;配电线路主要分电缆及架空线路,其中架空配电线路特别是山区部分由于长时间处于暴露在自然环境中,设备容易日晒雨淋、自然力、外施工力量等因素影响发生损伤及性能下降,同时由于架设地点地形地势复杂,如何实现其高效巡视维护成为亟待提高的重要问题。
各类提升架空配电线路巡视维护方案中,研制线路上自主或遥控行走巡视的机器人是重要方向之一,本方案旨在研发一种外部绝缘,能在带电架空配电线路上自主或遥控行走巡视的机器人;配合自身可换装式摄像头,对线路本体及周边环境情况进行近距离捕抓记录,实现架空配电线路的超近距精细巡视,同时预留特殊工种吊舱设计,便于日后开展喷涂、喷火、线路修补等特殊作业功能延伸。
1 研究背景20世纪80年代末,日本、加拿大、美国等发达国家先后开展了巡线机器人研究,我国进入21世纪也陆续有团队开展此类研究,目前巡线机器人研究主要针对输电线路,主要实现探伤性功能,同时信息及自动化技术仍有较大提升空间。
2 方案设计机器人总体高度小于350mm ,其中导线上方100mm ,下方小于250mm 。
设计机器人重量5kg ,连续工作时间4小时,最大爬坡角度为15°。
机器人本体主要由行走机构、导向限位机构、驱动控制机构、通信模块、图像采集模块、电源模块等组成,本体供电方式为蓄电池便于电池更换、充电;并设置电源检测模块,当机器人系统达到作业最低电量限制促发预警机制,保证满足返航过程电量需求,确保机器人“收放自如”。
图12.1 机器人夹线行走能力构建通过行走机构及导向限位机构实现机器人能在架空线路上行走及锁定。
行走机构:由驱动电机、同步带传动装置、行走轮组成,实现机器人在架空线路上的往复运动;导向限位机构:由机器人本体导向板和压紧轮组成,导向板用于人工进行机器人遂线挂接时实现导向;压紧轮用于机器人挂接完成之后完成与架空线之间的限位。
架空线路巡线机器人的研究综述
智能控制技术今 日 自 动 化12 | 2020.2 今日自动化Intelligent control technologyAutomation Today2020年第2期2020 No.21 国内外研究情况1.1 国外研究情况分析20世纪80年代,国际上逐渐开始重视架空线路的巡线机器人的技术发展工作。
包括日本以及北美一些国家均逐渐尝试研究新型更为可靠有效的巡线机器人,且取得了一定的研究成果。
20世纪80年代末期,日本企业率先研发了可以自动化越过障碍的光纤复合架空线路巡线机器人。
其主要包含驱动组件以及夹持组织间等构成,可以很好地运行于带有防震锤以及螺旋减震器的线路中。
如若需要越过杆塔,则巡线机器人会依据拟人的方式,打开其弧形手臂,随后本体越过杆塔抵达另一侧,最后收起另一端的手臂,由此完成整个工作。
而该设备在外部环境感应方面的建设并不完善。
由此可使用性并不高,另外该设备体积、质量均比较高,能源供给问题时期主要面临的问题。
而美国企业在此后一年研制出了第一个悬臂自治巡线机器人,其可以顺着架空线路等实现长距离地运行,可以同时开展电晕损耗检测、结合点分析、绝缘子检测以及压接头检测等多项任务,此外基于设备的多功能性,可以自主地将检测到的信息传递至地面工作人员。
如若遇到杆塔情况,则其也会依据拟人攀援的方式,越过杆塔,但无法跨过防震锤以及绝缘子等常规障碍。
2001年,泰国企业也设计了自己的自给电巡线机器人,其主要依靠电流互感器的作用从而在架空线路中爬行,并就获得的感应电流作为工作电源,进而有效处理了巡线机器人长时间的供电需要。
1.2 国内研究情况分析20世纪90年代末期,意识到科技发展的重要性,包括武汉大学以及中科院学校等均被赋予研发巡线机器人的重任。
在863计划的推动下,当时武汉大学率先研制出了第一台巡线机器人,其主要面向220 kV 供电线路,能够灵活地应对越障、智能化管控以及供电等多方面问题。
此后,中科院也开展了面向500 kV 的地线巡线机器人研发工作,并成功地实现了综合巡线机器人与地面移动基站的综合系统,且很好地应用于实际工作中。
机器人技术在架空电力线路检测中的应用
机器人技术在架空电力线路检测中的应用随着技术的不断发展,机器人技术在各个领域的应用也越来越广泛,包括架空电力线路的检测。
传统的电力线路检测方法主要依靠直升机或人工巡检,但这些方法费时费力,安全隐患大,同时检修周期也较长。
机器人技术的出现,可以有效地解决这些问题,提高架空线路的检测效率和安全性。
目前,机器人技术在架空电力线路检测中的应用可以分为无人机、机器人臂、自主移动机器人三种类型。
首先,无人机被广泛应用于架空线路检测,主要依靠它们的高空飞行能力和搭载相机、红外相机等传感器的能力。
通过使用定位系统等技术,无人机可以按照预设路径自主完成航线飞行,并采集电力线路的图像和视频信息,包括电线断裂、横跨树木或建筑物等情况。
无人机不仅可以减少人工巡检的时间和资源,同时在保障电力线路通畅性和安全性方面也有很好的效果。
其次,机器人臂在架空线路检测中的应用涵盖了各种类型,包括人形机器人臂、远程控制机械臂和无人机器人臂等。
这些机器人臂具有高度的灵活性和多样性,能够较为精确地检测电力线路上各种情况,如接头脱落、电线塌落等问题。
机器人臂可以精准地定位问题,同时通过搭载监控设备,也可以及时感知任何安全隐患。
与无人机相比,机器人臂的优势在于在遇到线路问题时,可以在最短时间内进行修复。
最后,自主移动机器人应用于电力线路检测主要依靠它们的自动化驾驶技术和算法。
自主移动机器人可以在不受人为控制的情况下,自主识别和避开障碍物,同时完整地扫描和检测电力线路。
自主移动机器人还可以通过与基站和云计算平台的连接,实现实时数据传输和远端操作。
这为电力维护人员提供了方便,并可大大提高电力线路的检测效率。
机器人技术的广泛应用提高了架空线路的检测效率和安全性,减少了人工巡检的时间和成本,提高了对电力设施的维护效果。
在未来的发展中,机器人技术也将继续引领电力行业的创新和发展。
以架空地线为轨道的巡检机器人

以架空地线为轨道的巡检机器人摘要:采用高压和超高压架空电力线是长距离输送电力的主要方式。
为了保证高压输电线路安全稳定的运行,必须定期对高压输电线进行巡检。
移动机器人技术的发展为架空电力线巡检提供了新的技术平台。
近年来,输电线路巡检机器人的研究已成为机器人研究领域的研究热点之一。
以架空地线为轨道的巡检机器人是以移动机器人作为载体,以多种传感器作为载荷系统,具有障碍物检测识别与定位、自主作业规划、自主越障、对输电线路及其线路走廊自主巡检、巡检图像和数据的机器人本体自动存储与远程无线传输、地面远程无线监控与遥控、电能在线实时补给、后台巡检作业管理与分析诊断等功能。
该巡检机器人具有结构紧凑、体积小、重量轻、作业空间范围广等特点。
关键词:机器人;巡检;轨道;越障;输电线路;架空地线1引言随着近几年国民经济的迅猛发展,我国输电线路里程数同比不断增加。
由于输电线路大多暴露在野外环境下运行,气象条件复杂、现场环境多变,导线、避雷线、绝缘子、金具等在长时间运行后,由于各种立的长期作用,可能发生断股、锈蚀、过热等情况,需要定期对线路进行巡查。
传统的巡线方法采用人工目测和飞机巡航。
采用前者,往往费时费力而事倍功半,而且由于其作业主要依靠作业人员的经验和个人素质,因此会常常造成漏检和错检,同时也受到自然环境的制约,如高山、湖泊等恶劣环境会对作业人员的人身安全造成威胁。
采用后者,国外起步较早,具有较先进的技术和丰富的经验,而国内则起步较晚,如果操作不当则会造成很大的人力物力损失。
因此,急需能够代替人工巡检的作业方法和设备。
用巡线机器人代替传统的人工巡检方法,一方面可以提高工作效率,实现无死角检测,提高检测精度;另一方面可以降低劳动强度,保障检测人员的人身安全。
目前现有的高压输电线路巡检机器人,大部分采用由轮式移动和复合连杆机构组合而成的复合移动机构或者采用多组移动单元串联组成的多自由度移动机构。
越障方式多为抓手式,即在跨越障碍时像人攀爬一样,通过机械抓手张开、移动、闭合的工作循环进行越障。
基于高压线巡检机器人的设计与研究
基于高压线巡检机器人的设计与研究【摘要】设计一种采用旋转方式越障的高压线巡检机器人,并研制出巡检机器人样机,通过Adams中模型的建立和仿真实验验证了该巡检机器人机械系统的可行性。
在研发的机械系统基础上,根据本机械系统采用旋转方式进行越障的特点,制定了巡检机器人的越障策略。
可以实现线上行走、典型障碍跨越等主要功能,满足设计要求。
【关键词】高压输电线路巡检机器人机械结构运动控制系统引言我国幅员辽阔,各地域的电力需求和发电站的分布不均匀,高压输电线的各种破损形式和异物的挂附将严重影响电力的输配,给电力的正常输送带来极大的危害。
对高压输电线路的及时巡检,可以防止以上情况的发生或恶化。
高压线巡检机器人需要依附于高压输电线进行作业,本章将重点介绍高压线巡检机器人的作业环境、机器人整体结构设计以及典型零部件的力学校核。
1课题研究意义及现状1.1 课题来源本课题主要任务是设计一款可以应用于500kV高压输电线路巡检的机器人,重点研究巡检机器人的结构设计和运动控制等问题,进行相应实验验证。
1.2 研究目的及意义目前,对野外高压输电线路的巡检主要分为以下三种方法:(1)地面目测法工作人员利用肉眼或采用望远镜对高压输电线路进行观测,来检测高压输电线的破损情况(2)无人机航测法采用无人直升机对高压输电线路进行巡检,工作人员通过遥控手柄来控制无人机的起降和沿高压输电线路的运行,来实现对高压输电线路的检测。
(3)机器人检测法采用特种机器人进行高压输电线路的巡检,利用特种机器人沿高压输电线线路的地线或者导线运行,通过机器人自身携带的传感器来检测高压输电线的破损情况。
随着人们对高压输电线路安全性的重视和科学技术的发展,利用机器人进行高压输电线路的巡检开始兴起。
巡检机器人可以跨越高压输电线路的典型障碍物,如防震锤、间隔棒、耐张线夹和悬垂线夹等,利用自身的机械结构在高压输电线路上进行上坡或者下坡运动,并且巡检机器人利用视觉传感器、超声波传感器或者红外传感器可以对高压输电线路上的破损进行检测。
电力设备巡检机器人的设计与实现
电力设备巡检机器人的设计与实现随着科技的不断进步和应用的推广,电力设备巡检机器人已经成为现代化电力系统必不可少的一部分。
这一系统可以大大提高电力设备巡检的效率,特别是在危险环境下,如高压架空线路、变电站等地方,机器人巡检可以有效地保障工作人员的安全。
本文旨在探讨电力设备巡检机器人的设计与实现。
一、机器人巡检的优势与传统的人工巡检方式相比,机器人巡检具有以下优势:1.效率更高:人工巡检需要花费大量时间和人力,而机器人可以自动巡检,节省了很多人力资源和时间。
2.安全性更好:巡检高压架空线路、变电站等设备是一项高危工作,使用机器人可以避免工人的人身伤害。
3.准确性更高:机器人使用高清晰度相机和其他传感器技术,可以更准确地检测设备缺陷和问题,更快地发现和解决故障问题。
4.减少能源浪费:机器人的巡检是通过电力系统进行的,而传统的人工巡检需要使用车辆等能源消耗设备,机器人巡检减少了大量的能源浪费。
二、机器人巡检系统的组成部分机器人巡检系统主要由机器人巡检车、控制器和信号传感器等组成。
1.机器人巡检车机器人巡检车是整个系统的关键部分,电力设备巡检机器人必须满足的要求是:具备良好的可移动性,能够爬升、跨越、跳跃或其他驰骋能力;具备足够的载荷能力,可以携带多种不同的检查设备和工具;防潮、防尘、防冲击、防静电等性能都需要到位。
2.控制器控制器是控制整个巡检车运行的核心部分,它由两部分组成:巡检车上的主控芯片和地面控制台。
主控芯片应该能够完成机器人的导航、定位、避障等功能,在实现智能化控制的同时保证系统的高稳定性。
地面控制台可以实现对巡检机器人的遥控操作、数据传输和巡检任务的规划、分配等功能。
3.信号传感器电力设备巡检不同于其他机器人的应用,因为他需要检测的信号较多:如电流、电压、绝缘电阻等等。
特别是对于变压器这类高压设备,则需要有红外线及紫外线,超声波、感温、振动、磁场等各类传感器。
传感器的添加可以有效提高机器人的检测能力和精度。
机器人技术在架空电力线路检测中的应用
机器人技术在架空电力线路检测中的应用、武汉高校等单位在该领域举行了讨论,并申请了相关专利:中国科学院沈阳讨论所申请的发明专利200410020490.8(申请日:2004.04.30)涉及一种超高压输电线巡检机器人机构。
它由移动车体、后手臂、前手臂组成,其中:移动车体由本体和行走轮组成,行走轮通过水平转动副和移动副安装在本体上,并与线相抓持,本体通过转动副分离与前、后手臂相连,手臂末端为手爪;所述前手臂、后手臂结构相同,其中每一手臂由上臂、下臂两部分组成,上臂为连杆及滚珠丝杠与滑块组合结构,通过水平转动副与下臂相衔接,下臂为大行程伸缩机构。
该发明工作空间大、分量轻、能耗低且越障能力强。
中国科学院自动化讨论所申请的发明专利200310118302.0(申请日:2003.11.18)涉及机器人技术领域,是110kv高压输电线路自动巡检机器人的一个单体。
该发明高压输电线路自动巡检机器人单体,由防护罩、驱动臂、驱动臂升降电机、小臂、小臂升降电机组成,其驱动臂包括驱动轮、驱动轮轴、同步带、同步带轮、主电机、主电机输出轴、开合电机、开合螺杆等,其中,主电机带动驱动轮,使巡检机器人单体在输电线上行走,开合电机控制开合机构,打算驱动轮与输电线之间的挂靠或撤离;其小臂中设有支撑轮和关节轴承,支撑轮槽曲率较大,与输电线保持点接触,有利于关节轴承对支撑轮姿势的自调整。
该发明自动巡检机器人单体,可实现在输电线上稳定行走、跨越障碍物、紧张刹车等功能,取代了人工巡检高压输电线路。
武汉高校申请的发明专利200510019930.2(申请日:2005.12.01)藏匿了一种高压巡线机器人沿输电线路举行导航的办法,其特征在于:将一系列相同参数的电磁传感器分离布置在机器人的手臂上,各组传感器分离同轴线布置,让机器人的各待调控部位的空间位姿状态能通过各该部位的传感器阵列组相对高压输电导线的距离表征。
本发明的优点是:实现容易,结构小巧,成本低廉;可避开强电场、强磁场的干扰,有用性强;控制算法容易,操作便利。
架空电力线路巡线机器人的研究综述

文章编号:100220446(2004)0520467206架空电力线路巡线机器人的研究综述X张运楚,梁自泽,谭民(中国科学院自动化研究所复杂系统与智能科学重点实验室,北京100080)摘要:回顾了国内外架空电力线路巡线机器人的研究现状,分析了几种巡线机器人的结构特点及存在的问题,详细探讨了巡线机器人避障、工作电源及线路故障探测等关键技术.最后,展望了架空线路巡线机器人的发展趋势和应用前景.关键词:巡线机器人;架空电力线;故障探测;避障中图分类号:TP24文献标识码:AMobile Robot for Overhead Powerline Inspection-a ReviewZHANG Yun2chu,LIANG Zi2ze,TAN Min(Key Laboratory of Complex Sys tems and Intelligence Science,Institute of Automation,Chines e Academy of Scienc es,Be ijing100080,China)Abstr act:This paper first reviews the development of mobile robot for overhead powerline inspection at home and abroad.Then,several typical inspect ion robot str uctures,their advantages and drawbacks ar e analyzed,and key technolo2 gies such as obstacle avoidance,power supply,fault detection methods are discussed too.F inally,the development tr end and the applicat ion perspective of overhead powerline inspection robot are presented.Keywor ds:inspection robot;overhead power line;fault detection;obstacle avoidance1引言(Introduction)采用高压和超高压架空电力线是长距离输配电力的主要方式.电力线及杆塔附件长期暴露在野外,因受到持续的机械张力、电气闪络、材料老化的影响而产生断股、磨损、腐蚀等损伤,如不及时修复更换,原本微小的破损和缺陷就可能扩大,最终导致严重事故,造成大面积的停电和巨大的经济损失.因此,电力公司要定期对线路设备巡检,及时发现早期损伤和缺陷并加以评估,然后根据缺陷的轻重缓急,以合理的费用和正确的优先顺序,安排必要的维护和修复,从而确保供电可靠性.目前,对输电导线进行巡检的方法主要有两种: (1)地面目测法:采用肉眼或望远镜对辖区内的电力线进行观测.由于输电线路分布点多面广、地理条件复杂,巡线工人需要翻山越岭、涉水过河、徒步或驱车巡检.这种方法劳动强度大,工作效率和探测精度低,可靠性差.(2)航测法:直升飞机巡线.直升飞机沿输电线路飞行,工作人员用肉眼或机载摄像设备观测和记录沿线异常点的情况.这种方法尽管距离接近,提高了探测效率和精度,但电力线从观察者或摄录设备的视野中快速通过,增加了技术难度,运行费用较高[1,2].移动机器人技术的发展,为架空电力线路巡检提供了新的移动平台.巡线机器人能够带电工作,以一定的速度沿输电线爬行,并能跨越防震锤、耐张线夹、悬垂线夹、杆塔等障碍,利用携带的传感仪器对杆塔、导线及避雷线、绝缘子、线路金具、线路通道等实施接近检测,代替工人进行电力线路的巡检工作,可以进一步提高巡线的工作效率和巡检精度.因此,巡线机器人成为巡线技术研究的热点.2国内外研究现状(Research status at home and abroad)巡线机器人的研究始于20世纪80年代末,日本、加拿大、美国等发达国家先后开展了巡线机器人第26卷第5期2004年9月机器人ROBOT Vol.26,No.5Sept.,2004X基金项目:国家863计划资助项目(2002AA420110-4).收稿日期:2004-03-30的研究工作.1988年,东京电力公司的Sawada 等人研制了光纤复合架空地线(OPGW)巡检移动机器人[3],如图1所示.该机器人利用一对驱动轮和一对夹持轮沿地线(OPGW)爬行,能跨越地线上防震锤、螺旋减震器等障碍物.遇到线塔时,机器人采用仿人攀援机理,先展开携带的弧形手臂,手臂两端勾住线塔两侧的地线,构成一个导轨,然后本体顺着导轨滑到线塔的另一侧;待机器人夹持轮抱紧线塔另一侧的地线后,将弧形手臂折叠收起,以备下次使用.图1 弧形手臂巡线机器人F ig.1 Arc 2shaped arm inspection r obot机器人运动控制有粗略和精确定位两种模式,粗略控制是把线塔和地线的资料数据(线塔的高度、位置,地线长度,线路上附件数量等)预先编制好程序输入机器人,据此控制机器人的行走和越障;精确定位控制则根据传感器反馈信息进行控制.机器人携带的损伤探测单元采用涡流分析方法探测光纤复合架空地线(OPGW)铠装层的损伤情况,并把探测数据记录到磁带上.美国TRC 公司1989年研制了一台悬臂自治巡线机器人原型[4],如图2所示.它能沿架空导线长距离爬行,执行电晕损耗、绝缘子、结合点、压接头等视觉检查任务,对探测到的线路故障数据预处理后,传送给地面人员.当机器人遇到杆塔时,利用手臂采用仿人攀援的方法从侧面越过杆塔.图2 TR C 悬臂巡线机器人F ig.2 TRC arm inspect ion robot1990年日本法政大学的H ideo Nakamura 等人开发了电气列车馈电电缆巡检机器人[5,6],见图3.机器人采用多关节小车结构和/头部决策,尾部跟随0的仿生控制体系,以10cm/s 的速度沿电缆平稳爬行,并能跨越分支线、绝缘子等障碍物.图3 蛇形巡线机器人F ig.3 Snake 2like inspection r obot机器人由六对左右对称、相互联结的小车组成,每个单体小车有两个电机,一个用于行走驱动,另一个用于控制联结前后小车的旋转关节的关节角;左468 机 器 人2004年9月右小车采用具有自保安功能的磁锁系统联结.磁锁系统用永久磁铁将左右小车牢牢锁紧,使两车橡胶驱动轮抱住馈电电缆,由行走电机驱动沿电缆平稳爬行.当机器人遇到分支线、绝缘子等障碍物时,每对小车上磁锁系统中的电磁铁通电,顺次将磁锁打开,机器人再改变两侧旋转关节的关节角,使左右小车分开.小车依次通过障碍物后,控制两侧旋转关节使左右小车合拢,电磁铁断电,磁锁再次锁紧,机器人恢复正常行走状态.图4是泰国King Mongkut p s U niversity of T ech 2nology T honburi 的S.Peungsungwal 等人2001年设计的一台自给电巡线机器人原型[7].该机器人采用电流互感器从爬行的电力线路上获取感应电流,作为机器人的工作电源,从而解决了巡线机器人长时间驱动的动力问题,并初步实现了根据摄像机图像判断电力线上绝缘子等障碍物位置的视觉导航功能.不过,该试验型巡线机器人仅能在两线塔间的电力线上爬行,无避障能力.图4 自给电巡线机器人Fig.4 Self power 2supply inspection robot由日本Sato 公司生产的电力线损伤探测器也采用了单体小车结构如图5所示.图5 损伤探测机器人F ig.5 Damage detection robot它能在地面操作人员的遥控下,沿电力线行走,利用车载探测仪器探测线路损伤程度及准确位置,将获取的数据和图片资料存储在数据记录器中.地面工作人员可回放复查,进一步确定损伤情况.探测器不具备越障功能,遇到线路附件等障碍物时便自动停止前进.该损伤探测器于1993年赢得了Shibu 2sawa 大奖[8].加拿大魁北克水电研究院的Serge Montambault 等人2000年开始了HQ LineROVer 遥控小车(见图6)的研制工作[9,10].遥控小车起初用于清除电力传输线地线上的积冰,逐渐发展为用于线路巡检、维护等多用途移动平台.第三代原型机结构紧凑(23@17@12cm),仅重25kg,驱动力大,抗电磁干扰能力强,能爬52b 的斜坡,通信距离可达1km.小车采用灵活的模块化结构,安装不同的工作头即可完成架空线视觉和红外检查、压接头状态评估、导线和地线更换、导线清污和除冰等带电作业,已在工作电流为800A 的315kV 电力线上进行了多次现场测试.但是,HQ LineROVer 无越障能力,只能在两线塔间的电力线上工作.目前,研究组正在开发具有越障功能的自治移动小车,实验结果表明,新一代HQ LineROVer 能在无人干预的情况下跨越障碍物,巡检范围达4km.图6 HQ LineROVer 遥控小车Fig.6 HQ LineROVer国内关于架空电力线路巡线机器人研究的报道较少.1998年武汉水利电力大学的吴功平教授研制出了架空高压线路巡线小车,小车采用单体三驱动轮结构,具有稳定的行走功能和越障功能,能顺利越过绝缘子、防振锤、悬垂线夹等主要障碍物,并利用携带的近距离红外故障诊断仪完成线路的诊断.巡线小车的行走、越障通过人工遥控加机械控制器来实现.目前,该研究组正在进行智能化程度较高、越障能力强的自治巡线机器人的研制工作[11].中科院469第26卷第5期张运楚等: 架空电力线路巡线机器人的研究综述沈阳自动化所、中科院自动化所在863基金项目资助下也开展了架空电力线路巡线机器人的研究.3巡线机器人的一些关键技术(Key tech2 nologies of inspection robot)从上述国内外已取得的研究成果可以看出,无越障功能的架空电力线路巡线机器人技术较为成熟,已近于实用阶段,如日本Sato、Fujikura,美国Machtech,Charlotte,NC等公司开发的巡线机器人.这类机器人一般需人工参与,只能完成两线塔之间电力线路的检查,作业范围小,自治程度低.自主巡线机器人能跨越线路附件、线塔等障碍物,实施大范围、长时间的线路巡检作业,但研究进展缓慢.3.1机械机构巡线机器人是机电一体化系统,涉及到机构、控制、通信、定位系统、移动平台上传感器的集成和信息融合、电源等,而机械机构是整个系统的基础,也是目前制约巡线机器人发展的技术障碍之一.巡线机器人机械机构的设计要求是:¥能在架空高压线上以期望的速度平稳爬行;¦具有一定的爬坡能力;§能够避越高压线路上的防震锤、线夹、绝缘子、线塔等障碍;¨在故障情况下有可靠的自保安措施,防止机器人摔落;©提供足够的空间安装所携带的电源以及探测、记录和分析处理仪器.可实现在管线上爬行的机构可以分为步进式爬行机构和轮式爬行机构两类[12].步进式爬行机构通过多只手臂的交替移动完成爬行,一般用于斜拉桥缆索、管道外壁的检查维护;轮式爬行机构依靠由电机驱动的行走轮与管线之间的摩擦,驱动机器人前进.轮式爬行机构行走平稳,速度快,有利于移动平台上线路探测仪器的可靠工作,因此,目前巡线机器人多采用此类爬行机构.越障机构是巡线机器人机构的关键.由于机器人悬挂在架空线上,越障时应保证机器人姿态平稳,并保持与其它导线和线塔金属部件的安全间距,因此设计难度较大.文献[3]采用了仿人攀援的弧形手臂越障机构,姿态控制较为复杂,文献[5]中给出的分体蛇形越障机构不适合跨越直径和间距较大的障碍,文献[11]的越障机构也同样存在跨越间距小的问题(见图7).巡线机器人越障操作类似人的空中攀援行为,因此,仿生设计是解决这一难题的有效方法.一种很有前景的方案是采用多只可伸缩机械臂结构,机械臂上部为爬行驱动机构,下部通过旋转关节相互链接.遇到障碍时,机械臂之间相互配合,采用仿人攀援策略调整姿态,跨越障碍.由于采用多只多自由度机械臂,机器人可以完成更为复杂的空中姿态调整,因而可跨越各种类型的线路障碍.图7小车式巡线机器人机械机构F ig.7Mechanical structure of car2like inspection robot3.2工作电源要保证巡线机器人在野外大范围内长时间工作,必须提供持续可靠的电源.巡线机器人功率一般为几百瓦,由于受体积和重量的限制,蓄电池组不能满足长时间供电要求.文献[3]尝试采用小型汽油发电机为机器人供电,但汽油发电机需携带油箱,工作时受环境影响大,可靠性差.由于巡线机器人一般沿大工作电流的电力线爬行,因此,最好能直接从电力线上获取能源,即耦合供电.文献[7]对采用电流互感器耦合从电力线上获取电源的设计方法进行了深入研究,分析了机器人所需的最大驱动力与其重量的比率、磁芯的截面积、副边线圈匝数等变量的关系,实验结果验证了方案的可行性.采用电力线耦合供电虽然解决了巡线机器人长期工作的电源问题,同时也导致机械机构及控制系统的复杂化.这是因为机器人越障时,电流互感器磁芯须从电力线上脱离,需解决磁芯分离机构控制和备用电源切换技术.3.3导航及定位技术导航就是规划巡线机器人的行走路径,包括全局路径规划和局部越障规划等[13]巡线机器人沿架空电力线路爬行,要跨越防震锤、悬垂绝缘子、线夹、杆塔等障碍,行走环境介于结构化和非结构化环境之间,因此导航问题主要为局部越障规划.局部越障规划就是利用环境传感器(如超声传感器、激光测距仪、视觉传感器等)提供机器人周围的局部环境信470机器人2004年9月息,产生下一时刻机器人位姿信息.由于巡线机器人环境中障碍物反射面较小,基于CCD摄像机的视觉传感器更适合作为巡线机器人的环境传感器.另外,悬挂在导线上的机器人,由于风力作用和自身姿态调整时中心的偏移会产生摆动,加大了越障控制难度.实时确定巡线机器人在作业环境中所处的位置,即机器人定位,对于准确标识线路故障点的位置至关重要.一种方案是采用里程计的相对定位技术,但累积误差较大;在经过的杆塔上贴上路标,也可以解决定位问题.3.4通讯技术通讯模块完成基站和巡线机器人之间的双向数据传输,包括来自机器人的实时视频图像、线路探测传感器数据、机器人位姿状态和由地面基站发出的各种遥控命令等,要求具有带宽高、距离远、抗干扰能力强等特点.3.5线路损伤探测技术巡线机器人需完成以下的基本巡检任务:¥杆塔巡视检查:检查杆塔横担、杆塔本体是否损坏、变形、锈蚀、被盗等.¦导线及避雷线巡视检查:检查有无锈蚀、断股、损伤等,有无悬挂异物等.§绝缘子巡视检查:检查普通和钢化绝缘子有无闪络、裂纹、破碎和烧伤痕迹;检查合成绝缘子有无严重污秽、伞裙开裂,均压环是否松动、歪斜或脱落.¨线路金具巡视检查:检查金具有无锈蚀或损坏,防震锤有无生锈、脱落等.©线路通道检查:检查线路通道内的树木、建筑物等与线路导线之间的距离.巡线机器人需携带必须的探测仪器完成上述探测任务,故障和损伤探测方法有以下几类:3.5.1非接触探测方法¥视觉检查:视觉检查是应用最为广泛的线路检查方法,采用高分辨率CCD摄像机摄取目标图像,实时传输到地面基站或存储下来,由基站操作人员根据图像中导线、绝缘子等设施的外观确定是否损坏.人工复查需对图像逐帧观察,效率较低;采用计算机图象处理技术自动判断线路故障,能快速识别多种故障现象,从而提高了工作效率.H irotaka Yoshida采用图像处理技术自动评估架空线的腐蚀程度,准确度与熟练技工相同[14].视觉检查一般能发现架空线大部分表面故障现象,精度和准确度取决于图像质量.因此,巡线机器人如何自主控制携带的摄像设备,捕捉特定兴趣目标,获取多视角、高清晰度目标图像,有待深入研究.¦红外探测技术:有些早期故障难以通过视觉检查发现,这可采用红外探测技术加以弥补.当输电导线存在机械故障(如导线断股、绝缘子破损、压接管连接不良等)时,运行过程中故障点附近就会出现局部温升,产生热辐射场.热成像技术(如红外摄像机)是一种广泛用于检测输变电系统局部温升故障的技术,它可以摄取表面温度超过周围环境温度的异常温升点的红外光谱图像,然后根据图像,人工或自动判读可能的故障器件,该方法已成功用于探测架空电力线上早期的发热故障点.使用时,被测点的温度要高于系统环境温度,天气应干燥晴朗.由于红外成像仪受天气环境影响较大,探测精度和准确性不高,对此,John Snell分析了影响探测质量的各种因素,提出了改进的措施[15].吴功平等人[16]研究了导线破损的红外检测机理和故障信号的特征提取与故障识别的综合判据,开发了一种便携式近距离红外检测与故障诊断仪,采用热释电传感器将故障点热辐射场装换为电压信号,由数据采集系统采集并送至数据存储系统记录,再通过故障诊断软件对数据进行处理来识别故障类型和确定故障发生的位置.§无线频谱分析:高压传输线系统各种完好部件周围的交变电场通常呈现为均匀的闭合实线,包括一个规则的无害电晕场.架空线路设备的一些故障(如绝缘子处漏电、导线断股、植物生长过于靠近导线等)会导致其周围电离空气层中出现不规则强烈电子活动,这些高频扰动表现为对交变电场闭合曲线的干扰.架空线上不同的故障类型和位置表现为上述干扰信号的形状、强度和位置,因此,对上述情况进行测量和评估,能够提供输电线路异常和故障的线索.根据以上原理,瑞士的KORONA Messtechnik公司研制了名为KORONA架空线故障探测系统,对架空线路早期故障探测具有很高的灵敏度和准确度[1].3.5.2接触探测方法¥电涡流探测法电涡流方法能准确探测钢芯铝绞线断股、钢芯腐蚀程度、OPGW铠装层损伤等故障,其基本原理是:将激励线圈贴近导线,并通以40kHz交变电流,激励线圈产生交变磁场,使输电线表面产生电涡流,而电涡流又会反过来产生反向磁场作用于测量线圈,从而改变测量线圈的电参数,导致测量线圈阻抗或电压发生变化.当输电线出现断股、破损或严重锈蚀等故障时,会使电涡流发生畸变,根据畸变程度就可提取有关故障缺陷的程度和471第26卷第5期张运楚等:架空电力线路巡线机器人的研究综述位置信息[17,18].¦电阻测量探测法架空高压线有很多连接器(如压接管),多种因素会导致连接器老化,导致接点处电阻增加,从而产生局部过热,如不及时维护,会增加线路功率损耗,甚至导致导线断裂而引发停电事故.SensorLink公司研制的Ohmstik微欧姆计[19]能测量一段带电导线或连接器两端的电阻,将测量值与正常值比较,就可断定该段导线或连接器件的状态,从而发现早期故障.这种方法比红外测量更直接,准确度高,不受电磁辐射、天气、负荷电流的影响.如何把多种线路故障探测器集成到巡线机器人移动平台上,运用传感器信息融合技术进一步提高早期故障探测的效率、精度和准确度,提高故障设施剩余寿命的评估质量[20,21],是巡线机器人研究的另一个重要目标.4展望(Outlook)电力公司面临不断增加的电力需求、更高供电可靠性要求和激烈的市场竞争,以可靠性为中心的精确维护策略RCM(Reliability Centered Mainte2 nance)[22]因能保证电力设施工作寿命最大化,已成为共识.对电力设施早期潜在故障的准确发现和正确评估,是成功实现上述策略的关键.巡线机器人应运而生,因而具有广阔的应用前景.巡线机器人技术有两个值得关注的趋势:(1)多传感巡线机器人随着自治巡线机器人技术的成熟和线路故障探测仪器的小型化,在一台巡线机器人上集成多种线路故障探测仪器将成为可能.这样,机器人可用多种传感器同时扫描线路,运用传感器信息融合技术以更高的分别率和可靠性发现各种类型的早期故障并加以评估,为维护人员实时提供架空电力线设施的工作状态报告.(2)分布式多巡线机器人系统多传感巡线机器人固然有其优点,但不可避免会带来体积较大及控制过于复杂的缺点.开发小型单传感巡线机器人,通过多个携带不同线路故障探测器的机器人协调工作,同样也可完成线路巡检任务.由于功能的单一化,可减小机器人体积及功耗,降低了研制难度;同时,多机器人有组织的协作,可使巡线机器人群体产生高性能的智能行为,通过群体间的知识共享和交换,可进一步提高线路故障的探测灵敏度和可靠性.参考文献(Refer ences)[1]Jaensch G,Hoffmann H,Markees A.Locating defects in h i gh voltagetransmission lines[A].Proceedings of the1998IEEE8th Interna2 tional Conference on Transmission&Distribution Construction, Operation&Live2line Maintenan ce[C].Orlando,FL USA:1998.179-186.[2]Whitworth C C,Duller A W G,Jon es D I,et al.Aerial video in2spection of overhead power lines[J].Power Engi n eering Journal, 2001,15(1):25-32.[3]Sawada J,Kusumoto K,Munakata T.A mobile robot for inspectionof power transmission lines[J].IEEE T ransactions on Power Deliv2 ery,1991,6(1):309-315.[4]Robots repair and examine live li nes in sever conditi on[J].ElectricalWorld,1989,5:71-72.[5]Kobayashi H,Nakamura H,Shimada T.An inspection robot forfeeder cables2basi c structure and control[A].Proceedings of th e 1991Internati onal Conference on Industrial Electronics,Control and Instrumentation[C].Kobe Japan:1991.992-995.[6]Nakamura H,Shimada T,Kobayashi H.An inspection robot forfeeder cables2snake like motion control[A].Proceedings of th e 1992International Conference on Industrial Electronics,Control, Instrumentation,an d Automation[C].San Diego,CA USA:1992.849-852.[7]Peungsungwal S,Pungsiri B,Chamnongthai K,et al.Autonomousrobot for a power transmissi on line inspection[A].T he2001IEEE International Symposium on Circuits and Systems[C].Sydney, NSW Aus tralia:2001.121-124.[8]Automatic Overhead Power T ransmission Line Damage Detector(www.sato2k.co.jp).[9]Montambault S,Cote J,St.Louis,M.Preliminary results on th edevelopment of a teleoperated compact trolley for live2li ne working[A].Proceedi ngs of the2000IEEE9th International Conferenceon Trans m i ssion and Distributi on Construction,Operation and Live2 line Maintenance[C].M ontreal,Canada:2000.21-27.[10]M ontambault S,Pouliot N.T he HQ LineROVer:contributi ng to in2novation in transmissi on line maintenance[A].Proceedings of th e 2003IEEE10th International Conference on T ransmi ssion and Dis2 tribution Cons truction,Operation and Live2line Maintenance[C].2003.33-40.[11]吴功平,戴锦春,郭应龙等.具有自动越障功能的高压线巡线小车[J].水利电力机械,1999,(1):46-49.[12]耿欣,周延泽.巡线机器人的爬行方案设计[J].机器人技术与应用,2002,(4):19-21.[13]朱淼水,杨建刚,吴春明.自主式智能系统[M].杭州:浙江大学出版社,2000.[14]Yosh i da H,Sobue K,Mas uda J.Image2processi ng technique for in2vesti gating stranded wire[A].20th International Conference on In2 dustrial Electronics,C ontrol and Instrumentation[C].B ologna,I2 taly:1994.1919-1924.[15]Snell J,Renowden J.Improving results of thermographic inspec2tions of electrical transmission and distributi on lines[A].Proceed2 ings of the2000IEEE9th International Conference on T ransmis2472机器人2004年9月sion and Distri bution C onstruction,Operati on an d Live2line M ainte2 nance[C].Montreal,Que.Canada:2000.135-144.[16]吴功平,戴锦春,郭应龙等.输电导线机械破损的红外检测与故障诊断[J].仪器仪表学报,1999,20(6):571-574.[17]Komoda M,Kawashima T,Minemura M,et al.Electromagneticinduction method for detecting and locating flaws on overhead trans2 mission li n es[J].IEEE Transactions on Power Delivery,1990,5(3):1484-1490.[18]梁唯溪,饶贵安,康宜华.高压输电线涡流检机器人的研制[J].无损检测,2000,22(10):442-444.[19]Ohmstic:Live2Line Micro Ohmmeter SensorLink Web site http://.[20]Havard D G,Bellamy G,Buchan P G,et al.Aged ACSR conduc2tors.I.testing procedures for conductors and line items[J].IEEE T ransactions on Power Delivery,1992,7(2):581-587.[21]Havard D G,Bis sada M K,Fajardo C G,et al.Aged ACSR con2ductors.II.prediction of remaining life[J].IEEE Transactions on Power Delivery,1992,7(2):588-595[22]Kilroe N.Line inspections2eyes and ears of RCM[A].2003IEEE10th International Conference on Transmission an d Di stribution Construction,Operati on and Live2line Maintenance[C].2003.18 -24.作者简介:张运楚(19682),男,博士研究生.研究领域:机器人控制,机器视觉.梁自泽(19632),男,硕士,副研究员.研究领域:机器人控制,电力系统自动化技术.谭民(19622),男,博士,研究员,博士生导师.研究领域:机器人控制,多机器人系统,系统可靠性及故障诊断.(上接第408页)[2]贾云得.机器视觉[M].北京:科学出版社,2000.[3]Son ka M,Hlavac V,Boyle R.Image Processi ng,Analysis andMachine Visi on[M].北京:人民邮电出版社,2002.[4]Li Y F,Lee M H.Applying vision guidance in robotic food han2dling[J].IEE E Robotics&Automation Magazine,1996,3(1):4 -12.[5]Feddema J T,Simon R W.CAD2driven m i croassem bly an d visualservoing[A].Proceedings of the1998IE EE International Confer2 ence on Robotics&Automati on(ICRA298)[C].Leuven,Bel2 gium:1998.1212-1219.[6]郑南宁.计算机视觉与模式识别[M].北京:国防工业出版社,1998.[7]Rali s S,Vikramaditya B,Nels on B J.Visual servoing fram eworksof microas sembly of hybrid M EM S[A].Proceedi ngs of the SPIE[C].B oston:SPIE,1998,vol.3519.70-79.[8]Vikramaditya B,Lord J G,Nelson B J.Vi sual servoed microposi2ti oning for microassembly of hybrid MEMS[A].Proceedings of th e IEEE1997Conference on Decision and Control(CDC97)[C].San Di ego:1997.96-102.[9]Kasaya T,M i yazaki H,Saito S,et al.Micro object handling underSEM by vision2based automatic control[A].Proceedings of th e 1999IEEE Internati onal Conferences on Robotics&Automation[C].1999.2189-2196.作者简介:江泽民(19752),男,博士生.研究领域:计算机视觉,显微操作等.473第26卷第5期张运楚等:架空电力线路巡线机器人的研究综述。
架空输电线路自主巡检机器人规划设计

架空输电线路自主巡检机器人规划设计王时哲;毛吉贵;王波;刘岳玲;姚玉存;潘龙【摘要】针对架空输电线路巡检中,杆塔、导(地)线上存在诸多障碍物(防震锤、压接管、耐张线夹、悬垂线夹等)及其相对位置和形态不固定的特点,设计了1种能够自主行进、跨越障碍物的巡检机器人。
通过本体控制系统规划、传感器识别系统和补给电源设计等关键技术的应用,使巡检机器人上线自主行进过程试验取得初步成功。
结果表明:自主行进过程中机器人与地面基站之间数据通信流畅,传感器探测回传图像清晰,从而验证了巡检机器人机构部件及控制系统的有效性。
%Aiming at the characteristic of obstacles on the pole, tower and line (such as damper, crimping pipe, suspension clamp, etc.) and their unfixed relative position and shape in patrol of over- head power transmission line, designs a sort of patrol robot which can independently move and span obstacle on the pole, tower and line. By the application of key technology such as the layout of the body control system, the designof sensor identification system and supplementary power supply, the testof patrol robot on-line independence move makes success, The result shows that data traffic between body and ground control station are fluent, return images are clear, thereby verifies the validity of the patrol robot' s mechanism parts and the control system.【期刊名称】《宁夏电力》【年(卷),期】2012(000)003【总页数】6页(P44-49)【关键词】巡检机器人;传感器识别;越障;输电线路【作者】王时哲;毛吉贵;王波;刘岳玲;姚玉存;潘龙【作者单位】宁夏电力公司教育培训中心,宁夏银川750011;宁夏电力公司吴忠供电局,宁夏吴忠751100;宁夏电力公司吴忠供电局,宁夏吴忠751100;宁夏电力公司教育培训中心,宁夏银川750011;宁夏电力公司教育培训中心,宁夏银川750011;宁夏电力公司教育培训中心,宁夏银川750011【正文语种】中文【中图分类】TM755高压架空输电线路自主巡检机器人是个复杂的光机电一体化系统,涉及机械结构、传感器信息通讯、自动导航控制、电源变换等多个技术领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
架空线路检修机器人设计与研究
摘要:现阶段,输电线路缺陷指使用中的线路设备发生的异常或存在的隐患,缺陷积累诱发故障,影响输电线路的安全稳定。
定期检修主要为线路运行状态的
检查及其组件的维修,有助于提高设备利用效率,延长设备寿命,预防事故发生。
带电检修指直接接触带电部分或在其周围的带电区域开展检查、测试、维护和修
理工作,可以及时发现并处置带电设备的缺陷,避免因设备检修造成的频繁停电,对保障电网的安全、稳定、经济运行具有重要意义。
然而,传统的人工带电检修
受地理、天气、工器具、防护设施、资质、成本等限制,存在风险高、劳动强度大、效率低、维护周期长等问题,已不能满足现代输电需求。
关键词:架空线路;检修机器人;设计与研究
引言
我国的超高压输电线路已经进入了一个飞速发展的阶段,送电负荷越来越大,线路若有故障将会对电网运行产生巨大影响。
因此,对输电线路进行维修保护已
经成为全国电力系统的一项非常重要的工作内容。
对绝缘子串巡视检查和检查耐
张压接管是否存在发热现象,已经成为输电线路日常运检的重要工作,需要工作
人员登塔逐一检修。
特高压输电线路由于电压等级高、杆塔高度高,运维检修人
员登塔体能消耗大,易发生虚脱情况,工作量大,工作效率低,且存在触电、坠
落等安全隐患。
防坠落轨道是目前超高压杆塔建造时为防止登塔人员意外坠落而
沿杆塔设置的一种T型钢轨道。
目前,它的作用仅限于为登塔人员悬挂安全绳,
为其加设一道保护,实现安全闭环保护,但仍不能减轻操作人员的工作强度,且
存在工作人员杆塔攀爬过程中易卡死等问题。
1重要性
输电线路是电网中电能传输的主要环节,输电线路的正常、安全运行是避免
电网事故的重要保障,是超特高压及智能电网建设的基础环节。
野外运行的输电
线路在雷击、污秽腐蚀、覆冰跳跃闪络和舞动、风振、土木施工等外力破坏作用
下等原因导致的导线断股、金具损坏、绝缘子劣化等故障,若不及时发现和修复,极容易进一步引发成输电线路断线及短路故障,造成非计划停运,严重影响电力
系统安全运行。
因此电力部门需对输电线路的安全隐患进行巡视和维护,将事故
消除在萌芽状态,对于提高电网的安全可靠性具有特别重要的工程实际意义。
传
统的输电线路巡视方法主要采用人工手持光学仪器沿线观测的方式,也有采用直
升机巡线的。
而人工巡视准确性低、劳动强度大,直升机巡线成本高,飞行作业
过程中风险高。
随着人工智能技术的发展和智能电网的建设,智能化的输电导线
运行状态检修技术成为国内外研究热点之一,特别利用机器人携带工具进行巡检
和维护可降低人员劳动及其作业风险,具有十分重要的现场应用价值,因此国内
外均在研究基于巡线机器人的输电线路状态检修技术。
2优化措施分析
2.1导线机器人
导线机器人有巡检和作业2种模式:巡检模式下,导线机器人利用传感器检
查架空线路运行状态;作业模式下,机器人利用末端执行器维修组件。
该类机器
人直接运行于架空线路,需符合线路安全距离要求、适应高空环境,以及行驶安
全平稳、动作可靠。
为了实现在架空线路上的运动,早期的导线机器人多采用仿
生设计,如蛇形机器人、猿式机器人、腿式机器人等,示意图见附录A图A2。
蛇
形机器人利用多对电机控制相邻关节的依序开合来爬行和越障;猿式机器人利用
机械手爪和滑轨翻越杆塔;腿式机器人利用机械腿伸缩和关节交替转动实现导线
行走与越障。
上述仿生机器人适用范围广,但大多结构复杂、尺寸及重量较大,
因此难以建立合适的运动学模型,控制难度高,实用性较差。
近年来,针对机器
人动作的平稳性问题,导线机器人多被设计为结构更为紧凑的单体机器人和轮-
臂式机器人。
单体机器人沿穿过其机体的导线运动,其结构简单、体积小,可在
沿导线行驶时稳定重心,但其无法越障且安装繁琐,不适用于常规架空导线的带
电检修。
为了兼容多种检修装置,轮-臂式机器人将机箱、运动机构和末端执行
器分开,通过机械臂悬挂于导线,利用关节的转动、末端的抓握和机械臂的摆动
来动作。
由于智能带电检修需兼顾适用性与灵活性,近年来该类机器人逐渐向精
细化、轻量化等方向发展。
例如,机器人LineScout能根据检修任务重组功能模
块,降低其单次运行的控制难度。
多单元串联机器人通过改变挂线机械臂数目和
机箱连接方式翻越双悬垂金具、转角塔等横向尺寸较大的障碍物。
然而,多个机
械臂的同时动作导致控制难度增大,多机箱串联也提高了运动空间需求,因此,
该类机器人的实用性低。
机器人Expliner将轮臂复合,实现在500kV分裂导线
上的运动,越障过程中,机械臂可充当平衡棒,维持机身稳定。
机器人LineRanger用桨叶替代行走轮抓线,仅需小幅抬动机身便可以直接行走于障碍物
表面,该机器人能平稳运行于735kV分裂导线,适用于长距离架空线路的近距离
检查。
导线机器人不仅能够在柔性、长距离架空线缆上行驶,还能开展针对性的
设备维修作业。
在导线修补方面,现有的机器人通过贴合导线滑动来将补修管压
接于断股处,用夹钳避免导线滑移脱落,实现稳定动作。
但是,导线智能带电修
补还应结合人工带电检修方法,根据导线尺寸与损伤程度采取不同的处理方法,
提高导线修补质量。
在异物清除方面,导线机器人主要采用熔断法、切割法和清
扫法。
相比电力无人机,用机器人清除导线异物对其他架空线路设备的影响较小。
例如,利用旋转刀片机构,机器人在沿导线表面行走的同时能够完成异物切割。
设计了电加热和电锯机构,通过近距离熔断和压紧切割实现导线异物带电清除。
研制了用于导线除垢的伸缩转刷,但该机构无法清除缠绕导线的长飘挂物。
及时
处理异物以免对运行环境造成二次污染是下一步研发需要考虑的问题。
2.2机器人控制方案的研究
特高压输电线路巡视辅助检修机器人的控制系统由图像采集系统和运动控制
系统两大部分组成。
2.2.1图像采集系统
图像采集系统构成如下:①一个高清可见光摄像头,实现高清图像采集;②
一个热成像摄像头,实现热成像图像采集;③一个控制云台,实现高清可见光摄
像头和热成像摄像头运动控制;④两个运动状态检测摄像头,实时图像采集机械
装置运动位置的图像;⑤一个图像交换机,将四路摄像头图像信号和控制信号合
并网络通信;⑥两个无线网桥,一个接入图像交换机,一个接入显示和控制计算机,实现交换机和计算机的无线通信;⑦一个显示和控制计算机,配备专用软件,
显示热成像图像,显示热成像图像中的高低温度,显示高清图像,显示机械装置
运动位置的图像,并可实时存储图像。
2.2.2运动控制系统
运动控制系统组成如下:①11路电机控制摇杆,产生相应电机运动控制的信号;②摇杆信号读取和无线信号通信板,基于无线收发芯片nRF1024和STc51系
列芯片为主的控制系统,实现摇杆信号读取和控制信号的无线通信;③多路继电
器控制信号和无线信号通信板,基于无线收发芯片nRF1024和STc51系列芯片为
主的控制系统,实现多路继电器控制和控制信号的无线通信;④多路继电器板,
控制11路电机的动作。
结语
巡线机器人的基本任务之一就是携带传感器对输电线路的各种缺陷进行检测,目前针对对输电线路各元件的检测方法较多,各具特点,可以根据具体环境和条
件选择适当的方法,而基于多传感器信息融合技术的检测方法可以实现对输电线
路的全方位、高精度检测。
参考文献
[1]严宇,邹德华,刘夏清,等.高压输电线路带电检修机器人的研制[J].现
代制造工程,2017,(9):29-35.
[2]杜欣.高压输电线路智能巡检机器人的研制与应用[J].城市建设理论研究(电子版),2017,(29):141.。