UG动画仿真简单实例图文教程
UG仿真操作教程
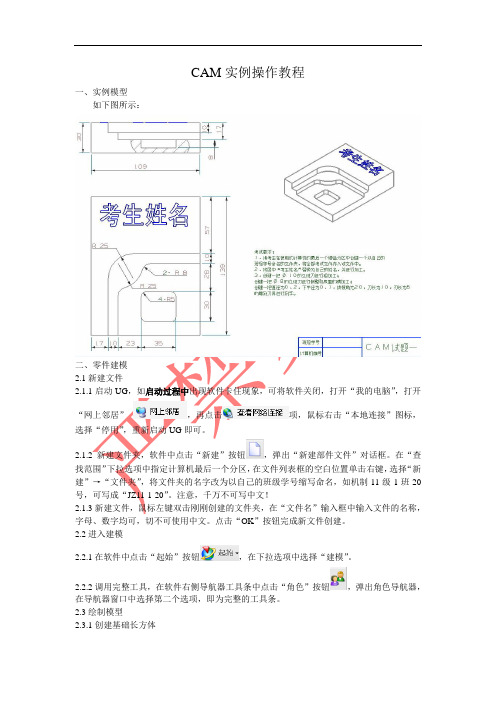
CAM实例操作教程一、实例模型如下图所示:二、零件建模2.1新建文件2.1.1启动UG,如启动过程中出现软件卡住现象,可将软件关闭,打开“我的电脑”,打开“网上邻居”,再点击项,鼠标右击“本地连接”图标,选择“停用”,重新启动UG即可。
2.1.2新建文件夹,软件中点击“新建”按钮,弹出“新建部件文件”对话框。
在“查找范围”下拉选项中指定计算机最后一个分区,在文件列表框的空白位置单击右键,选择“新建”→“文件夹”,将文件夹的名字改为以自己的班级学号缩写命名,如机制11级1班20号,可写成“JZ11-1-20”。
注意,千万不可写中文!2.1.3新建文件,鼠标左键双击刚刚创建的文件夹,在“文件名”输入框中输入文件的名称,字母、数字均可,切不可使用中文。
点击“OK”按钮完成新文件创建。
2.2进入建模2.2.1在软件中点击“起始”按钮,在下拉选项中选择“建模”。
2.2.2调用完整工具,在软件右侧导航器工具条中点击“角色”按钮,弹出角色导航器,在导航器窗口中选择第二个选项,即为完整的工具条。
2.3绘制模型2.3.1创建基础长方体点击“草图”按钮,点击鼠标中键确认,点击“矩形”工具按钮,绘制一个矩形(屏幕中点击左键确定矩形第一个点,移动鼠标,再次点击鼠标左键,确定第二个矩形对角点)。
约束矩形尺寸,点击“自动判断的尺寸”按钮,鼠标左键点选矩形的一条边,会出现跟随鼠标移动的尺寸线,在屏幕空白位置点击左键,尺寸线被放置,同时出现参数输入文本框,根据图纸输入尺寸数值,点击鼠标中键,确认尺寸。
同样方法,约束矩形的另外一条边。
约束完毕如下图所示。
退出草图,点击“完成草图”按钮,退出草图界面。
拉伸草图曲线,将鼠标移动到刚刚绘制的草图曲线上,曲线会变成粉色,点击鼠标右键,在弹出的列表中选择“拉伸”按钮,弹出拉伸参数对话框,根据图纸要求,将对话框中“起始值”设为“0”,“终止值”设为“30”。
如下图所示,点击“确定”按钮,完成长方体创建。
UG4.0 运动仿真教程 超详细
精选完整ppt课件
16
精选完整ppt课件
17
精选完整ppt课件
18
实例讲解一
精选完整ppt课件
19
实例二 :四连杆机构
精选完整ppt课件
20
实例三:电风扇
精选完整ppt课件
21
UG 运动仿真
精选完整ppt课件
1
UG NX运动仿真模块(Motion Simulation)是一个模拟仿真的设计 及分析工具,用于建立运动机构模型, 分析其运动规律。运动仿真模块自动 复制主模型的装配文件,并建立一系 列不同的运动仿真状况。运动仿真是 建立在装配过程后进行的机械性能分 析。
精选完整ppt课件
2
精选完整ppt课件
3
精选完整ppt课件
4
精选完整ppt课件
5
精选完整ppt课件
6
精选完整ppt课件
7
精选完整ppt课件
8
精选完整ppt课件
9
精选完整ppt课件
10
精选完整ppt课件
11
精选完整ppt课件
12
精选完整ppt课件
13
精选完整ppt课件
14
精选完整ppt课件
15
UGNX绘制一个小球分流机构并进行仿真验证

UGNX绘制一个小球分流机构并进行仿真验证
依一老师1分钟前
今天来做一个趣味小球分流机构的运动仿真,无外力控制就能把一堆小球小球按照下落顺序进行分离,整个模型建模比较简单,仿真也是,小伙伴们来挑战一下吧!
建模图纸
1.底座建模,非常简单,拉伸即可
2.摇摆挡板建模,一个拉伸
3.两个小球,直径30mm.设计特征插入一个球即可
进行装配
固定好底座后,进行简单的约束,小球位置随意摆放,不发生干涉即可。
运动仿真
首先进入运动仿真模块,开始我们的运动仿真三部曲。
1.首先确定要动的物体,其中有两个小球和挡板,分别都设为运动体(连杆)
2.接下来判断他们怎么动,挡板是绕着圆柱左右摇摆,所以是旋转副
小球是在滑道内进行下落,所以做两个平面副即可
3.因为小球与滑到以及挡板会发生碰撞,所以添加3D接触。
两个球同样的设置后,给挡板与滑道也加上3D接触
4.因为小球是自由落体运动,所以驱动就是重力了,直接新建结算方案,设定重力的方向
5.求解后就就能播放动画了。
通过改动小球及挡板质量会有不同的效果哦,在设计产品时需注意。
是不是很简单的运动仿真小案例,掌握UG八大模块知识点,什
么案例都难不到你!。
UG运动仿真模块

•
机构如下:
ቤተ መጻሕፍቲ ባይዱ
• •
以下是雨刮的创建运动仿真过程: 第一步:建立连杆,本例共六个连杆,点击连杆钮,依次对蜗杆、涡轮、连 杆、滑块和雨刮建立连杆。如下图:
第二步:创建运动副,本例创建了旋转副、滑动副、齿轮副、线缆副、齿轮齿条 副。 (1)点击旋转副:对驱动轴、涡轮、连杆、雨刮创建旋转副。如下图:
•
创建运动副本例创建了旋转副滑动副齿轮副线缆副齿轮齿条以下依次为涡轮连杆与涡轮连杆与滑块雨刮的旋转副各副的方向跟原点如图所示3点击齿轮副
UG运动仿真
1、运动仿真定义: 运动仿真模块是CAE应用软件,用于建立运动机构模型, 分析其运功规律运动方针。 运动仿真模块可以进行机构的干涉分析。跟踪零件的运动轨迹, 分析机构中零件的速度、加速度、作用力、反作用力、和力矩等。 根据这些分析结果可以指导修改零件的结果设计或调整零件的材 料。 2、创建运动仿真的步骤 可以认为是一组连接在一起的连杆的集合。 第一步 创建连杆 第二步 创建运动付 第三步 定义运动驱动 第四步 求解 第五步 仿真 第六步 分析
•
第五步:仿真运动。点击动画,弹出动画对话框,点击播放按扭,即可观察 动画。
•
第六步:分析。点击图表,对雨刮进行运动分析,选择运动副J006,请求为 速度,组件为幅值,点击确定
•
雨刮的速度图表如下,速度的变化符合设计要求。
以下依次为涡轮、连杆与涡轮、连杆与滑块、雨刮的旋转副,各副的方向跟 原点如图所示
•
(2)点击滑动副:对滑块和线缆创建滑动副,各副的方向和原点如下图所示
•
(3)点击齿轮副:创建传动轴跟油轮的齿轮副,参数比率为第一个旋转副对 第二个旋转副的速度之比,此例中的比率为0.48,如下图所示。注意:齿轮 副必须建立在两个旋转上
UG运动仿真分析(精品课件)

连杆
运动副
8
1. 连杆
连杆几何体
连杆几何体用于将屏称。
❖ 对机构作运动分析,
名
不必赋予质量和惯性矩等参数。
称
9
2. 运动副
运动副的作用:允许所需的运动和限制不要的运 动。
UG提供了12种运动副共分两大类:普通运动副 8种,它是独特的,于自身有关;特殊运动副4种, 是在两个普通类型的运动副之间定义了特殊关系的 运动副,允许两个不同类型的运动副一起工作完成 特定的功能。
5
Scenario 导航器 6
3. 机构分析的一般步骤
❖ 打开主模型文件。 ❖ 进入运动分析模块,创建一个Scenario模型
并设置机构分析环境。 ❖ 创建各机构对象(构件、运动副、标记等)。 ❖ 指定分析结果类型,对机构进行求解分析。 ❖ 输出分析结果。
7
创建运动分析对象
在运动分析中,连杆和运动副是组成 构件的最基本要素,两者都具备是机构 运动的必要条件。
❖ 固定副 在连杆间创建一个固定连接副,相当于以刚性连接两连杆,连杆间无相 对运动。
13
特殊运动副:
❖ 齿轮齿条副:滑动副和旋转副的结合 ❖ 齿轮副:两个转动副的结合 ❖ 线缆副:两个滑动副的结合 ❖ 点线接触副:4个自由度 ❖ 线线接触副: 4个自由度 ❖ 点面副:5个自由度
14
模型准备与运动分析
18
3. 封装 用来收集特定的、用户感 兴趣的对象信息的一组工具。 有三个功能: ➢ 测量 ➢ 跟踪 ➢ 干涉
19
❖ 测量
测量机构中目标对象的距离或角度,并建立安全区 域。
❖ 跟踪
用来生成每一分析步骤处目标对象的一个复制对象。
❖ 干涉
主要比较在机构运动过程中是否发生重叠现象。
Ug运动仿真实例

例:一、曲柄滑块机构1.连杆1—500*10*20的长方体,俩端倒R10及¢10*2孔如图:2.连杆2---20*10*80的长方体,俩端倒R10,凸台2-¢10*10(高10)如图:3.连杆3---200*10*20的长方体,俩端倒R10及¢10*2孔如图:4.滑块—50*40*30的长方体,30*40的面上放置腔槽20*10*50;40*50的面上放置¢10*高10的凸台如图二、装配。
新建部件文件,注意单位mm三、动画1.应用—运动--- 方案浏览器–master –右键---新方案—取消连杆/刚体--定义连杆,连杆1固定,依次定义序号为001到004,每次选“应用”最后“取消”2.运动副—旋转副—第一连杆选连杆1/ 过滤器选点(圆心),再选矢量(+Y)/ 运动驱动选恒定的,速度给1000/第二连杆选连杆2/应用同理,运动副—旋转副—第一连杆选连杆2/ 过滤器选点(圆心),再选矢量(+Y)/ 运动驱动选否/第二连杆选连杆3/应用上图右同理,运动副—旋转副—第一连杆选连杆3/ 过滤器选点(圆心),再选矢量(+Y)/ 运动驱动选否/第二连杆选滑块/应用3.滑块的运动运动副—滑动副—第一连杆选连杆1/ 过滤器选点(圆心),再选矢量(+X)/ 运动驱动选否/第二连杆选滑块/应用5.动画上图右时间,步数改好确定6.运动7.动画剪辑:方案浏览器—右击structures---输出—选格式MPEG---指定文件名---输入名—OK二、俩滑板的运动滑板---500*80*101.先装配好2.应用—运动--- 方案浏览器–master –右键---新方案—取消3.连杆/刚体—定义滑板1(固定)--应用--定义滑板2---应用上图右4.运动副—滑动副—第一连杆选滑板1/ 过滤器选点,再选矢量(X)/ 运动驱动选恒定的,速度给100---第二连杆选滑板2/应用5.动画时间,步数改好确定6.运动7.动画剪辑:方案浏览器—右击structures---输出—选格式MPEG---指定文件名---输入名—OKWelcome To Download !!!欢迎您的下载,资料仅供参考!。
ug nx motion机构运动仿真基础及实例

ug nx motion机构运动仿真基础及实例
UGNXMotion机构运动仿真是一种基于UGNX软件平台的机构运动分析工具,它能够模拟机构的运动及其相应的反应,为机构设计和优化提供有效的工具支持。
本文将介绍UG NX Motion机构运动仿真的基本原理和操作方法,并通过实例详细说明其应用。
首先,本文将介绍机构运动仿真的基本理论,包括机构运动的分类、运动学和动力学基本概念、运动仿真的基本流程等,以帮助读者更好地理解机构运动仿真的原理和方法。
接着,本文将详细介绍UG NX Motion机构运动仿真的操作方法,包括建立机构模型、定义运动和负载条件、设定仿真参数、运行仿真和分析仿真结果等。
通过这些操作,读者将能够熟练地使用UG NX Motion机构运动仿真工具进行机构设计和优化。
最后,本文将通过实例详细说明UG NX Motion机构运动仿真的应用,包括平面机构、空间机构、连杆机构等。
通过这些实例,读者将能够更加深入地了解UG NX Motion机构运动仿真的能力和优势,为机构设计和优化提供更加有效的支持。
综上所述,《UG NX Motion机构运动仿真基础及实例》将为读者介绍机构运动仿真的基本原理和操作方法,并通过实例详细说明其应用,为机构设计和优化提供有效的工具支持。
- 1 -。
UG6.0仿真教程
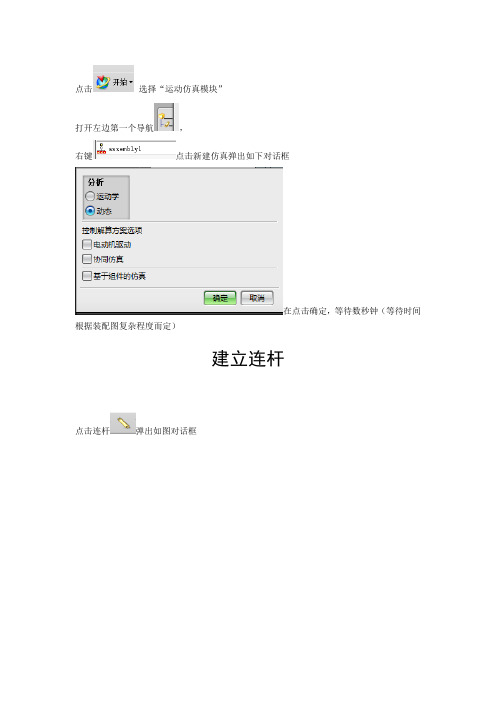
点击选择“运动仿真模块”打开左边第一个导航,右键点击新建仿真弹出如下对话框在点击确定,等待数秒钟(等待时间根据装配图复杂程度而定)建立连杆点击连杆弹出如图对话框在固定连杆前打勾然后再装配图上选择要固定的连杆,固定的连杆选完后在点击接着就到选择活动的连杆了,在选择活动连杆前把固定连杆前的勾去掉,然后选择活动的连杆,选择好了连杆后点击应用(记得对话框固定连杆前的勾去掉,)接着在选择另一个连杆选完后再点击。
直到选完连杆后点确定建立运动副点击打开弹出对话框在类型里选择需要的运动副,比如然后选择需要滑动副的连杆,然后点击指定原点在如下图所示的下拉菜单里找到相应放置坐标原点的位置然后点击在下拉菜单里选择相应的方向点击驾驶员设置动力,弹出对话框,在平移下拉菜单里选择相应的运动要求,当要选择函数时,点击函数弹出对话框接着点击再点击f(x)函数管理器,弹出对话框点击新建弹出对话框在插入下拉菜单里选择需要的函数在选择相应的函数然后在双击它,然后框中有相应的函数公式在函数中填入相应的参数如图所示然后点击3次确定,在在回到建模桌面,完成一个连杆的运动副及动力的设置再设置一个滑动副框在类型里选择需要的运动副,比如然后选择需要滑动副的连杆,然后点击指定原点在如下图所示的下拉菜单里找到相应放置坐标原点的位置选择好后,点击指定方位然后点击在下拉菜单里选择相应的方向点击驾驶员设置动力,弹出对话框,在平移下拉菜单里选择相应的运动要求,当要选择函数时,点击函数弹出对话框接着点击再点击f(x)函数管理器,弹出对话框点击新建弹出对话框在插入下拉菜单里选择需要的函数在选择相应的函数然后在双击它,然后框中有相应的函数公式在函数中填入相应的参数如图所示然后点击次确定选择刚建立的函数第二项函数,呈蓝色的刚刚建立的函数呈“蓝色”然后点击确定再次点击,回到建模桌面,又完成个运动副及动力设置。
其他的运动副的设置及动力设置,操作过程都大同小异。
仿真调试然后开始调试点击顶部的解决方案弹出对话框在对话框里的时间步数填入相应的数据然后点击“确定”点击顶部菜单栏“求解”,更新状态(等一秒钟左右的)开始调试了,点击顶部菜单栏的“动画”弹出对话框点击“播放”期待的时刻到了。
UG仿真第1章分析

约束效果示意
2〕设置仿真对象类型
在工具栏中单击【仿真对象类型】图标,单击弹出的【面对面接触】命令,弹出【面对面接触】对话框;
设置相关参数
单击确定
3〕添加载荷
单击工具栏中的【离心力】命令、【扭矩】命令分别添加载荷;
设置相关参数
单击确定
单击确定
设置相关参数
扭矩载荷
〔4〕求解及其输出恳求的设置
在【仿真导航器】窗口的分级树中,单击【Solution 1】节点,右键单击弹出的【编辑】命令,弹出【编辑解算方案】对话框,进展相关设置,再求解。
显示任意一个单元上节点的应力值大小
3〕新建注释
可以在窗口上选择【编辑后处理视图】命令:
可以对后处理中的【显示】、【图例】、【文本】等选项进展相关参数的编辑
4〕后处理视图
通过在窗口菜单上选择【标识】命令,或者右击【Post View 1】选择此命令,弹出【标识】对话框:
在【标识】对话框的【选择】文本中即可显示【最小】(Min)、【最大】(Max)、【总和】(Sum)及【平均值】(Avg)等指标值
5〕标识操作
右击【后处理导航器】中的【Post View 1】选择【新建路径】命令:
拾取路径
设置参数
6〕新建路径
右击【Post View 1】选择【新建图表】命令,弹出【图表】对话框:
单击确定
默认全部参数
特征边缘的路径图表
7〕新建图标
在工具栏中单击【编辑后处理视图】,弹出【后处理视图】对话框,在【颜色显示】下拉框中选择【条纹】选项:
单击该命令
先选取1
再选取2
2〕装配组件
通过移动和旋转等动态操作方法,将齿轮组装配成啮合状态;
两处啮合
UGNX 运动仿真 实例练习-杰克盒子运动

原点在中心
QZZ 原创作品
QQ 464175828
• 添加【弹簧】2
QZZ 原创作品
QQ 464175828
• 新建【解算方案】
QZZ 原创作品
QQ 464175828
• 求解
QZZ 原创作品
QQ 464175828
• 运动
QZZ 原创作品
QQ 464175828
• 新建一个仿真,在弹出的对话框中点击动 力学仿真
分析类型选择“动力学”
QZZ 原创作品
QQ 464175828
• 创建【固定连杆】
QZZ 原创作品
QQ 464175828
• 创建【连杆】
QZZ 原创作品
QQ 464175828
QZZ 原创作品
QQ 464175828
UG NX 运动仿真
Motion Simulation 杰克盒子运动
源文件地址: 链接: /s/1jGkSZXk 密码: 758n
QZZ 原创作品
QQ 464175828
零件的原始状态
QZZ 原创作品
QQ 464175828
QZZ 原创作品
QQ 464175828
• 添加【旋转副】3
QZZ 原创作品
QQ 464175828
• 添加【滑动副】1
原点为球心
QZZ 原创作品
QQ 464175828
• 添加【滑动副】2
QZZ 原创作品
QQ 464175828
• 添加【圆柱副】
QZZ 原创作品
QQ 464175828
• 添加【螺旋副】
QZZ 原创作品
QQ 464175828
• 添加【齿轮副】
QZZ 原创作品
UGNX高级仿真教程PPT课件
对当前模型的特征进行编 辑来修改模型。
临时从模型中移出一个或 多个特征。特征仍然存在
释放被抑制的特征
主模型尺寸
修改理想化模型特征或草 图尺寸来做设计变更
第32页/共217页
几何体理想化
理想化模型练习
第33页/共217页
几何体清理
使用模型清理工具栏中的命令对模型进行几何 体整理。可以消除网格化分CAD几何上出现的 很多问题。
操作: 选择面
第23页/共217页
几何体理想化
分割体
使用分割体
命令来
分割选择的实体。
在为复杂的网格划分做准 备的时候,该功能特别有 用,这有助于将几何体分 割成更小、更简单和更易 于处理的几何题,以便于 特定区域的网格划分,便 于用户划分出更好的网格
操作:
第24页/共217页
几何体理想化
分割体
实体
分割曲面的目的: 在分割面上添加一个边线,可以 用来添加线载荷 分割一个不规则曲面成许多小曲 面来定义映射网格 恢复一天先前使用合并曲面或者 自动修复几何命令移出的边线。
第41页/共217页
几何体清理
合并边线
使用合并边线 边线
把两条相连的边线合并成一条
合并边线的用途:
建立更大的或者更连续的边界线来划分网格
1D单元
理想化文件
2D单元
主模型文件
3D单元
解算方案
载荷条件
解算工况
约束条件
解算集
解算结果
第12页/共217页
有限元分析文件查看
有限元分析文件查看器
பைடு நூலகம்
有限元导航器中的一个特殊的查看窗口
第13页/共217页
显示所有加载的模型
UG运动仿真教程

h0
(time t0 t1 t0
)2
g(h1
h0
)
h1(time t1)
Step(time,2,1,3,step(time,4,0,5,-3));
Step(time,2,1,3,3)+step(time,4,0,5,-3) 注意为什么不写成
Step(time,2,1,3,3)+step(time,4,3,5,0) Step函数可以控制模型的运动时间段。
UG运动仿真教程
青华工作室
一、UG动画的分类
1、利用装配序列实现动画: 坦克-飞机-变形金刚 虎钳
2、利用参数化实现动画: 振动的铜棒 水面涟漪
3、利用运动仿真模块实现动画: 莲花盛开 蜜蜂采蜜 变形金刚 万能夹具
二、UG运动仿真的步骤
1、模型的准备
运动仿真的模型对象:点、线、面、体,装配及非装配 的三维模型均可。
(Step(x,x0-0.001,0,x0,1)+Step(x,x1-0.001,0,x0,-1))*f(x)+ Step(x,x1,h1,x2,h1)+ (Step(x,x1-0.001,0,x1,1)+Step(x,x2-0.001,0,x2,-1))*g(x)
多项式函数与余弦函数
2、运动分析
分析各杆件之间的运动关系
3、定义刚性的连杆 4、添加运动副和运动驱动(难点) 5、解算及后处理
三、step函数
格式:STEP (x, x0, h0, x1, h1)
参数说明:
x ―自变量,可以是time或time的任一函数
x0 ―自变量的STEP函数开始值,可以是常数
UG仿真操作教程
CAM实例操作教程一、实例模型如下图所示:二、零件建模2.1新建文件2.1.1启动UG,如启动过程中出现软件卡住现象,可将软件关闭,打开“我的电脑”,打开“网上邻居”,再点击项,鼠标右击“本地连接”图标,选择“停用”,重新启动UG即可。
2.1.2新建文件夹,软件中点击“新建”按钮,弹出“新建部件文件”对话框。
在“查找范围”下拉选项中指定计算机最后一个分区,在文件列表框的空白位置单击右键,选择“新建”→“文件夹”,将文件夹的名字改为以自己的班级学号缩写命名,如机制11级1班20号,可写成“JZ11-1-20”。
注意,千万不可写中文!2.1.3新建文件,鼠标左键双击刚刚创建的文件夹,在“文件名”输入框中输入文件的名称,字母、数字均可,切不可使用中文。
点击“OK”按钮完成新文件创建。
2.2进入建模2.2.1在软件中点击“起始”按钮,在下拉选项中选择“建模”。
2.2.2调用完整工具,在软件右侧导航器工具条中点击“角色”按钮,弹出角色导航器,在导航器窗口中选择第二个选项,即为完整的工具条。
2.3绘制模型2.3.1创建基础长方体点击“草图”按钮,点击鼠标中键确认,点击“矩形”工具按钮,绘制一个矩形(屏幕中点击左键确定矩形第一个点,移动鼠标,再次点击鼠标左键,确定第二个矩形对角点)。
约束矩形尺寸,点击“自动判断的尺寸”按钮,鼠标左键点选矩形的一条边,会出现跟随鼠标移动的尺寸线,在屏幕空白位置点击左键,尺寸线被放置,同时出现参数输入文本框,根据图纸输入尺寸数值,点击鼠标中键,确认尺寸。
同样方法,约束矩形的另外一条边。
约束完毕如下图所示。
退出草图,点击“完成草图”按钮,退出草图界面。
拉伸草图曲线,将鼠标移动到刚刚绘制的草图曲线上,曲线会变成粉色,点击鼠标右键,在弹出的列表中选择“拉伸”按钮,弹出拉伸参数对话框,根据图纸要求,将对话框中“起始值”设为“0”,“终止值”设为“30”。
如下图所示,点击“确定”按钮,完成长方体创建。
UG--运动仿真教程
运动仿真是UG/CAE(Computer Aided Engineering)模 块中的主要部分,它能对任何二维或三维机构进行复杂的运 动学分析、动力分析和设计仿真。通过UG/Modeling的功能 建立一个三维实体模型,利用UG/Motion的功能给三维实体 模型的各个部件赋予一定的运动学特性,再在各个部件之间 设立一定的连接关系既可建立一个运动仿真模型。
对运动过程控制 的功能主要是由 运动控制选项来 实现的
运动仿真动画文件输出:
在运动场景导航窗口中选中一个场景,单击鼠标右键之后将会弹 出一个右键快捷菜单,在该菜单中选择菜单项Export,将会显示 UG/Motion给用户提供的几种动画输出的格式
重力作用下运动
施加弹簧阻尼下的运动
伪连杆例子:
需要说明的几点:
1.Snap Links
选种这个单选项后,用户所设置的运动副为两个连杆之间的连接,则在该对话框中要求 设置运动副在各个连杆上的相关参数;空置该单选项时,用户所设置的运动副为连 杆与假象的机架之间的连接,只需设置运动副在这个连杆上的参数既可。
2.Selection Steps
该选项给用户提供了建立一个运动副的操作步骤。共包含四个步骤,其中可根据用户的 要求省去几项,通过完成各个步骤,可以引导用户完成运动副参数的设置。(①第 一个连杆 ;②运动副在第一个连杆上的位置和方向;③第二个连杆 ;④运动副在第 二个连杆上的位置和方向)
创建运动副
1.选择运动付要约束的第一个连杆(action link),并推断 其原点和方位。 2.选择运动付要约束的第二个连杆(base link),并推断 其原点和方位。 3.没有装配好的连杆之间可以“咬合”
1)旋转副 (Revolute)