动态干涉仪干涉图位置配准及移相误差校正_郑东晖
干涉仪测向系统相位误差校准方法
0 引 言
干涉 仪测 向系统 一般 由天线 、 接 收和 处理 机构 成 。
1 干 涉仪 测 向系 统 测 向误 差来 源分 析
一
个 两 天线单 元 阵进行 干 涉仪 测 向的系统 模 型如
干涉 仪天 线 一般 由按 一定 方 式 排 列 的天 线 阵 列 构 成 ;
图 1所示 。图 中 , d为 天 线 1与天 线 2之 间 的基 线 长
P h a s e e r r o r c a l i b r a t i o n me t h o d s o f d i r e c t i o n — f i n d i n g
s y s t e m o f a n i n t e r f e r o me t e r
Z HAN G J u a n,L I U He n g ,HE Gu a n - l i a n g
( N o .7 2 4 R e s e a r c h I n s t i t u t e o f C S I C, N a n j i n g 2 1 1 1 5 3 )
接收和处理机通过比较各天线单元接收到的信号的相 位差 来 获得 目标 信 号 的到 达 方 位 信 息 _ l J 。 由于 设 计 、
工艺 等方 面 的影 响 , 接 收 机 前 端 无 源 器 件很 难 做 到相 位一 致 ; 接 收机 无源 器件 的相 位 会 随着 工作 时 间 、 温 度
第3 4卷
第 3期
雷达与对抗
RADAR & ECM
Vo 1 . 3 4 No. 3 S e p t . 2 01 4
2 0 1 4年 9月
干 涉 仪 测 向系 统 相 位 误 差 ቤተ መጻሕፍቲ ባይዱ 准方 法
近代光学测试技术- 动态干涉测试技术
移相干涉的抗震算法-CSI方法
第1幅图
……
第2幅图
……
移相干涉图
……
重组干涉图
傅里叶变换
移相干涉图中存在 载频,重组干涉图 频谱中的误差谱与 相位谱相互分离, 可将误差消除
背景 滤波窗g(fx,fy)
fx
误差谱 相位谱
李博,陈磊 等。 Carrier squeezing interferometry… Optics Letters,36(6),2011.3
Example of VC measurement of flat
ZYGO动态干涉仪DynaFiz
关键特征: • 在空气湍流和极端振动的环境下进行动态测量。 • 优化的光学系统提供了清晰可见的中间空间频率特征。 • LivePhase™ 软件可以进行实时Zernike分析。 • Movie模式获取随时间变化的波前。 • 高功率,长寿命稳频氦氖激光器。
由重组干涉图恢复相位的过程
傅里叶变换
频谱S(fx,fy)
反正切计算恢复相位
其中g为滤波窗
恢复到原始尺寸
几种算法计算结果对比
含有振动误差 的移相干涉图 的一帧
四步法结果
de Groot七步法结果
CSI法结果
时域抗振-CSI用于Φ600干涉仪
四步法计算结果
减
CSI计算结果
等于
相位偏差
CSI用于Φ600干涉仪测试结果
长干涉腔长测量
气流的影响
空气梯度对干涉测量的影响
干涉腔有空气折射率温度梯度分布时的波面测试结果
干涉腔空气折射率均匀分布时的波面测试结果
震动严重时的测试结果
没有震动时 的波面图
震动较小时 的波面图
193 nm移相点衍射干涉仪的测量误差分析
193 nm移相点衍射干涉仪的测量误差分析
邢廷文;何国良;舒亮
【期刊名称】《光电工程》
【年(卷),期】2009(36)2
【摘要】为了提高移相点衍射干涉仪对193 nm投影光刻系统的检测精度,本文对其主要测量误差进行了探讨.在简要介绍了193 nm移相点衍射干涉仪的基本结构和测量原理之后,总结了可能对测量结果产生影响的各种误差及其产生的原因.通过理论分析和数值模拟的方法分别对参考波前误差,相移误差、探测器非线性误差以及光源波动,环境变化引起的随机误差等进行了具体分析,从而得到各种测量误差的大小、存在形式以及与干涉仪结构参数的依赖关系,并提出了相应的避免或减小误差的方法.
【总页数】6页(P67-72)
【作者】邢廷文;何国良;舒亮
【作者单位】中国科学院光电技术研究所,成都,610209;中国科学院光电技术研究所,成都,610209;中国科学院研究生院,北京,100039;中国科学院光电技术研究所,成都,610209;中国科学院研究生院,北京,100039
【正文语种】中文
【中图分类】O439
【相关文献】
1.移相整流变压器移相角测量误差分析 [J], 王念同;沈继刚;等
2.空域移相偏振点衍射波前检测技术∗ [J], 郑东晖;李金鹏;陈磊;朱文华;韩志刚;乌兰图雅;郭仁慧
3.移相式点衍射干涉仪的几个关键技术 [J], 刘景峰;李艳秋;刘克
4.基于空间同步移相的1/4波片相位延迟量测量误差分析 [J], 王征;朱祥;翟凤潇;郝蕴琦;杨坤
5.空间移相干涉仪的移相误差分析和测试 [J], 左芬;刘兆栋;陈磊
因版权原因,仅展示原文概要,查看原文内容请购买。
干涉式测向方法的误差的产生分析及消除
⼲涉式测向⽅法的误差的产⽣分析及消除2019-04-26摘要:⼲涉式测向⽅法简介,从测向原理、造成误差的原因多⽅⾯进⾏了深⼊剖析,对于⼲涉式测向产⽣的误差问题,采⽤天线转换连接、增加校正参数的⽅法,验证后获得较好的结果,能够在⼯程实现上解决测向存在的误差。
关键词:⼲涉式测向;伪距测量;基线测量;误差消除⼲涉式测向作为⼀种精确的⽆线电测向⽅法,⼴泛应⽤在军事、科研领域。
利⽤统⼀发射源发射信号,到接收终端统⼀天线阵中两根接收天线的时间差,和这两根天线之间的间距,通过三⾓公式求解,进⽽得到相对⾓,实现相对定位。
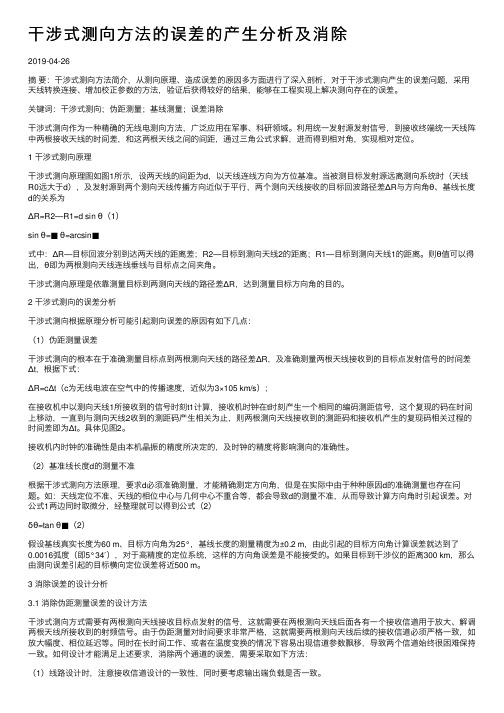
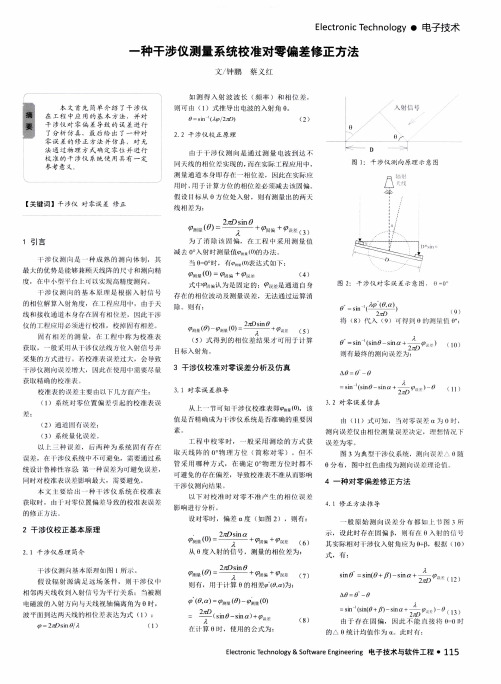
1 ⼲涉式测向原理⼲涉式测向原理图如图1所⽰,设两天线的间距为d,以天线连线⽅向为⽅位基准。
当被测⽬标发射源远离测向系统时(天线R0远⼤于d),及发射源到两个测向天线传播⽅向近似于平⾏,两个测向天线接收的⽬标回波路径差ΔR与⽅向⾓θ、基线长度d的关系为ΔR=R2—R1=d sin θ(1)sin θ=■θ=arcsin■式中:ΔR—⽬标回波分别到达两天线的距离差;R2—⽬标到测向天线2的距离;R1—⽬标到测向天线1的距离。
则θ值可以得出,θ即为两根测向天线连线垂线与⽬标点之间夹⾓。
⼲涉式测向原理是依靠测量⽬标到两测向天线的路径差ΔR,达到测量⽬标⽅向⾓的⽬的。
2 ⼲涉式测向的误差分析⼲涉式测向根据原理分析可能引起测向误差的原因有如下⼏点:(1)伪距测量误差⼲涉式测向的根本在于准确测量⽬标点到两根测向天线的路径差ΔR,及准确测量两根天线接收到的⽬标点发射信号的时间差Δt,根据下式:ΔR=cΔt(c为⽆线电波在空⽓中的传播速度,近似为3×105 km/s);在接收机中以测向天线1所接收到的信号时刻t1计算,接收机时钟在t时刻产⽣⼀个相同的编码测距信号,这个复现的码在时间上移动,⼀直到与测向天线2收到的测距码产⽣相关为⽌,则两根测向天线接收到的测距码和接收机产⽣的复现码相关过程的时间差即为Δt。
内场干涉仪测向误差分析及相位误差校正方法

△ 甄1 △
A ~
( 4 )
图 2 内场 干 涉仪 测 向相位 误 差校 正 示意 图
分 析 式 ( ) 以得 到如 下结 论 : 4可
( )测 向精 度 和入射 角 0有关 。 当入射 角 与天线 1 视轴 一致 ( 0 ) , 向误 差最 小 ; 0= 。 时 测 当辐射 源 的到 达 角 与天线 的基 线 一 致 ( = 0 ) , 9 。 时 由于 cs o0:0 很 小 , 的相 位误 差 △ 都 将 造 成 非 常 大 的测 角 误 差 , 而导 从 致测 向不 可信 。因此 , 在保 证 测 向精 度 的前 提下 , 涉 干
对 干涉仪 而 言 , 场 条 件 下 接 收信 号 波 前 近 似 为 远 平 面波 , 对其 影 响较 小 。但 是 , 内场 测试 时 , 于 近 在 属
场 条件 , 到达 干涉 仪 天 线 的信 号波 前 由平 面 波 变 成 球 面波 , 会对 干涉 仪 的测 向造成 影 响 。 将 ( )远 场条 件下 干涉 仪 天线接 收 信号 的波 程 1
0 引 言
随着新 技术 、 体 制 在 雷达 侦察 设 备 中 的广 泛 应 新 用, 侦察 设 备 的测 向精 度 不 断 提 高 … 。对 于 采 用 干 涉 仪 测 向体制 的雷 达 侦察 设 备 , 内场 进 行 测 向精 度 评 在 估 时 , 试验 条件 限 制 , 多 情 况 下 , 试 距 离 难 以 满 受 很 测 足 被 测 天线 的远 场 条 件 , R > D / 的条 件 _ 。近 即 2 A 2 ] 场 条件 下测 试会 给 干涉 仪 引 入 相 位 误 差 , 而 对 干 涉 从 仪 测 向精度 指标 的考 核 带 来 一 定 的影 响 , 低 测 量 结 降
一种干涉仪测量系统校准对零偏差修正方法
八 q 0, 图 1: 干 涉仪 测 向 原 理 示 意 图
△
、 窆
1 引 言
{ 涉 仪测 向足 ‘种 成熟 的测 向体 制 ,其 最 大 的 优 势 足 能 够 菲 顺 尺线 的 尺 寸和 测 向精 度 , 在 }I小 、I f I q-以 眦 离 精 度 测 向 。
仪 的 l: J、 川 必 颈进 仃段 濉 ,校 掉 同 l仃相 差 。 仃 卡H, 的 测 I h, I:程 称 为 校 准 表
LI{(67)一妒 (o)=— !
十 * (
5)
(5) 式 得 到 的 相 位 差 结 果 可用 于 汁算
获 取 , 一般 川 从 l‘涉仪 线 方位 入 射 信 号并 口标 入 别 『f]。
【关 键 词 】 干 涉仪 对 零误 差 修 正
蜘1测 得 入 射 波 波 长 (频 率 ) 和 相 位 差 .
n{1(1) 式推 导j}5电波 的 入 射 角 0。
O=sin (^p/2 ))
(2)
2.2 干 涉仪 校 正 原 理
由 J 卜涉 仪 测 m 是 通 过 测 量 电 波 到 达 不 J司天 线 的 棚 化 簪 的 ,而 在 实 际 工 程 应 j_}j中 , 测 鲢通 道 小 【j『J仃 n:一 相 位 差 , 此 在 实 际 应 川 il,j,用 j-.汁 箅 b f 的 相 位 差 必 须 减 去该 吲 偏 。 假 设 目标 从 0方他 处 入 射 , 则 有 测 量 出 的两 氏 线 相 差 为 :
步仪 测 向 的 摧 本 原 址 恨 据 入 射 信 号 的 相 位 解 入 日t角 嫂 , 1,1:【 J、 用 中 , 由 于 天 线 平【J接 收 通 道 水 吁 J 仃 棚 f 差 , 因 此 干 涉
移相干涉中移相误差测量与补偿
移相干涉中移相误差测量与补偿朱振宇;傅星;王大江;曹航;李华丰【摘要】移相千涉测量中对移相器的移相误差进行测量与补偿是提高该测量方法准确度的有效手段.通过研究移相干涉移相误差对测量结果的影响,提出了测量移相器工作时位移与角度变化的方法,建立了相应的实验测量装置,实现了移相器的位移及角度变化的测量.根据移相器中位移与角度的数学关系完成了移相误差的补偿,修正后的移相效果在移相干涉仪中采用了整周期移相千涉图灰度差值的方法进行了验证.【期刊名称】《计测技术》【年(卷),期】2011(031)003【总页数】4页(P20-23)【关键词】干涉技术;移相误差;测量;图像处理【作者】朱振宇;傅星;王大江;曹航;李华丰【作者单位】天津大学精密仪器与光电子工程学院,天津,300072;中航工业北京长城计量测试技术研究所,北京,100095;天津大学精密仪器与光电子工程学院,天津,300072;中国白城兵器试验中心,吉林,白城,137001;中航工业北京长城计量测试技术研究所,北京,100095;中航工业北京长城计量测试技术研究所,北京,100095【正文语种】中文【中图分类】TB9220 引言随着科学技术的发展,特别是激光干涉技术、光电探测技术及数字图像处理技术的广泛应用,传统的移相干涉技术也不断提出新的测量方法和技术以扩展干涉仪的测量功能及测量准确度,这些技术为光学元件的高水平加工提供了有效的测量手段。
移相干涉测量通常采用移相方法使得干涉条纹相对探测器产生有规则平移得到测量值,通常其测量准确度可以达到几个纳米[1-3]。
由于移相误差[1,4]的存在,测量结果受到影响,研究移相误差对测量结果的影响以及相应的补偿技术是提高移相干涉测量的重要途径。
通过研究测量算法抑制移相误差的影响及研究移相装置的移相误差能够在设计及调整的过程中最大限度地减小移相误差,对提高移相干涉测量的准确性具有十分必要的现实意义。
本文针对移相器的移相误差问题研究移相器移相误差的测量和补偿技术,以提高移相干涉测量的准确度。
相移干涉测量中相移误差的自修正
相移干涉测量中相移误差的自修正赵智亮;夏伯才;陈立华;张志华;郑万国【摘要】分析了相移干涉测量过程中相移误差产生的原因,研究了基于迭代最小二乘算法的相移误差修正法,实现了任意两幅干涉图间相对移相量的计算和自适应校正.基于光、机、电、算四系统,实现任意步长的3幅以上干涉图像的采集,用迭代最小二乘法计算任意两幅干涉图间的相对移相量,然后将其闭环反馈至硬件相移系统,自动修正相移步长为给定量的特征相移值,从而完成干涉仪相移误差的自修正.构建了相移误差自校正系统,通过实际干涉测量验证了算法的正确性和相移误差自修正系统的可行性.结果表明,自适应修正后相移量相对误差<5%,面形RMS测量重复性<λ/1 000,实现了高精度、高效率的相移误差自适应修正.【期刊名称】《光学精密工程》【年(卷),期】2013(021)005【总页数】6页(P1116-1121)【关键词】相移干涉测量;相移量计算;相移误差;误差自修正【作者】赵智亮;夏伯才;陈立华;张志华;郑万国【作者单位】成都精密光学工程研究中心,四川成都610041;成都太科光电技术有限责任公司,四川成都610041;中国工程物理研究院工学院,四川绵阳621900;成都精密光学工程研究中心,四川成都610041;成都太科光电技术有限责任公司,四川成都610041;成都精密光学工程研究中心,四川成都610041【正文语种】中文【中图分类】TH744.31 引言从20世纪60年代,采用干涉仪测量高精度表面面形的相移解相算法诞生以来,实现相移过程的硬件系统也随之发展起来。
现在通用的实现相移的方法主要有机械式和波长调谐式两种。
这两种相移方式都存在相移误差,而且不仅在系统建设初期存在初始相移误差,在系统工作一段时间后还会由于硬件老化产生相移误差。
因此,要用相移解相来实现高精度的表面面形复原,就必须构造出高精度的相移误差修正系统来实现精确相移。
为克服相移机构产生的误差,国内外研究人员提出了大量的相移标定算法[1-7]。
移相干涉仪环境微扰的外差检测及信号处理
移相干涉仪环境微扰的外差检测及信号处理
吴栋;朱日宏;陈磊;姬会东
【期刊名称】《光电工程》
【年(卷),期】2004(031)009
【摘要】对环境微振动干扰进行补偿可减小移相干涉测量的误差,其中振动量的检测是实现振动补偿的前提.以声光调制器作为光学移频器,在移相式平面干涉仪中组合成外差干涉测振系统,可以实现光程差微小变化(范围为0到1/2波长)的实时检测.在外差信号处理中采用单片RF/IF相位测量芯片直接对两路40MHz模拟信号进行比相,简化了通常使用的数字测相方法,其精确测相的典型非线性值小于1度.用该系统实际测量了周期性振动和地面冲击振动对干涉仪的影响,获得了干涉仪所受微振动的幅度和相位.
【总页数】4页(P53-56)
【作者】吴栋;朱日宏;陈磊;姬会东
【作者单位】南京理工大学电子工程与光电技术学院,江苏,南京,210094;解放军镇江船艇学院教研部,江苏,镇江,212003;南京理工大学电子工程与光电技术学院,江苏,南京,210094;南京理工大学电子工程与光电技术学院,江苏,南京,210094;南京理工大学电子工程与光电技术学院,江苏,南京,210094
【正文语种】中文
【中图分类】TH744.3
【相关文献】
1.检测硅衬底上制备的单模波导马赫—曾得尔干涉仪能量耦合的光频外差方法 [J], Shiba.,N;杨湖
2.激光外差干涉仪光电信号处理方法及特点 [J], 赵洋;李达成
3.测量精度达3.2nm的在线表面粗糙度外差干涉仪信号处理系统 [J], 赵洪志;李达成
4.空间移相干涉仪的移相误差分析和测试 [J], 左芬;刘兆栋;陈磊
5.干涉仪环境振动的外差检测与自适应控制 [J], 吴栋;朱日宏;陈磊;何勇;姬会东因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第36卷第2期2016年2月Vol.36,No.2February,2016光学学报ACTA OPTICA SINICA动态干涉仪干涉图位置配准及移相误差校正郑东晖1陈磊1李金鹏1朱文华1李建欣1韩志刚21南京理工大学电光学院,江苏南京2100942南京理工大学先进发射协同创新中心,江苏南京210094摘要为抑制动态干涉仪系统中存在的干涉图空间位置匹配误差以及移相误差,采用相位相关算法和载频交叠重构干涉术,前者以光斑边缘为匹配特征,通过配准测试光斑,实现对4幅移相干涉图在空间位置上的像素级配准;后者按列交叠重构4幅载频移相干涉图,实现相位谱与误差谱在傅里叶频谱中相分离,滤取相位谱即可抑制移相误差对测量结果的影响。
实验结果显示,两种方法均可以有效抑制干涉图的位置配准误差以及移相量误差,其结果与干涉仪结果相吻合,均方根值和峰谷值分别相差0.0057λ和0.0235λ。
相位相关算法不受光强畸变等因素的影响,而载频交叠重构干涉术可以同时抑制由移相器件造成的两倍频相位误差和由光强畸变引入的一倍频相位误差。
关键词物理光学;动态干涉;相位相关;像素配准;线性载频;移相误差中图分类号O436文献标识码Adoi:10.3788/AOS201636.0226002Position Registration for Interferograms and Phase-Shifting ErrorCalibration in Dynamic InterferometerZheng Donghui1Chen Lei1Li Jinpeng1Zhu Wenhua1Li Jianxin1Han Zhigang2 1School of Electronic and Optical Engineering,Nanjing University of Science and Technology,Nanjing,Jiangsu210094,China2Advanced Launch Corporative Innovation Center,Nanjing University of Science and Technology,Nanjing,Jiangsu210094,ChinaAbstract To suppress the spatial mismatching and the phase-shift error in dynamic interferometer,the phase correlation algorithm and carrier squeezing interferometry are used respectively.The former takes the edge of test beam spot as the match characteristics to achieve the matching precision with pixel level of4phase-shift interferograms in space by registrating the test spot.The latter achieves separating the phase lobe and the error lobe in Fourier spectrum through the rearranging of4carrier phase-shift interferograms,therefore the phase error can be suppressed by extracting the phase lobe.The experimental result shows that the mismatching error and the phase-shift error are suppressed well by the two techniques,and the corrected result accords with the interferometer,where the differences between their root-mean-square value and peak-to-valley value are0.0057λand0.0235λrespectively.The phase correlation algorithm is not affected by factors such as intensity distortion, and the carrier squeezing interferometry can also suppress the phase error whose spatial frequency is twice the fringes caused by phase-shifting devices and phase error with the same spatial frequency as the fringes caused by the intensity distortion error.Key words physical optics;dynamic interferometry;phase correlation;pixel registration;linear carrier;phase-shift errorOCIS codes260.3160;120.2650;120.5050;050.1950收稿日期:2015-08-25;收到修改稿日期:2015-10-13基金项目:国家自然科学基金(61108041,61409052)、中国科学院天文光学技术重点实验室项目(CAS-KLAOT-KF201404)、江苏省研究生科研创新计划(KYZZ15_0121)作者简介:郑东晖(1989—),男,博士研究生,主要从事光干涉测量方面的研究。
E-mail:zdonghui_njust@导师简介:陈磊(1964—),男,博士,教授,博士生导师,主要从事光学计量测试与光电智能化仪器等方面的研究。
E-mail:chenlei@(通信联系人)光学学报1引言动态干涉仪能够在同一时刻、不同空间位置获得多幅移相干涉图,有效地避免了振动、空气扰动等时变误差因素的影响,实现被测相位的实时测量[1-6]。
目前大多数动态干涉仪均采用空间分光、偏振器件移相方案。
如Kolipoulos [7]结合薄膜分束片(PBS)和1/4波片,采用4个电荷耦合器件(CCD)同时获得4幅移相干涉图;Hettwer 等[8]采用衍射光栅分出0级和±1级光,在±1级衍射光中插入1/4波片,波片快轴方向分别与P 光、S 光一致,3束光经检偏器后,在同一个CCD 上得到3幅相位差为π/2的移相干涉图;Yan 等[9]采用聚合物研制延迟阵列,通过与CCD 靶面的像素级匹配,实现动态干涉测量;Abdelsalam 等[5]在参考光路中引入1/4波片调制参考光的偏振态,使之与测试光平偏振态相互垂直,结合光栅与偏振阵列,在斐索共光路干涉仪中实现动态测量;钱克矛等[10]采用龙基相位光栅分光、偏振片组移相,实现了对动态过程相位的测量。
以上方案中均采用一个或多个CCD 在同一时刻、不同空间位置获得多幅干涉图,由于干涉图在空间上是相互分离的,需要进行位置配准,否则将引入相位恢复误差[11];同时由波片、偏振片的加工和装调引起的延迟量以及方位角误差,将导致干涉图移相量偏离理想值[12]。
Kiire 等[13]通过特定的方法使4幅干涉图具有相似的灰度分布,采用互相关运算确定各幅干涉图之间的位置匹配关系;Chen 等[14]直接在光路中加入一个目标,分光后各干涉图中均含该目标像,采用相关运算计算位置匹配关系;田枫等[15]基于方差分析、阈值分割和改进Hough 变换的统计分析方法,提出一种圆形域同步移相干涉图位置配准方法;一些学者[13,16-18]采用迭代法和线性载频干涉图等校正移相量误差;李博等[19-20]通过圆载频处理技术得到每个子图的基频能量和相位信息,通过各子图之间的相位差校正位置匹配误差和移相量误差。
针对动态干涉仪系统中存在的干涉图空间位置匹配误差以及移相误差,本文采用相位相关算法对4幅干涉图进行像素级位置配准,校正位置匹配误差;位置配准完成后,采用载频交叠重构干涉术(CSI)校正移相量误差。
2动态干涉仪的系统误差及其校正方法动态干涉仪光路图如图1所示。
偏振方向相互正交的参考光与测试光,经二维相位光栅分光,通过小孔光阑选取(±1,±1)4支衍射效率一致的级次,分别经过延迟阵列的4个子波片,依次引入π/2、π、3π/2、2π的延迟量,最后经过透光轴与水平方向成45°的偏振片,由CCD 采集得到移相量依次相差π/2的4幅同步移相干涉图。
该动态干涉系统基于光栅分光、延迟阵列移相,干涉图空间位置不匹配、移相量不准确为系统中重要的误差。
图1动态干涉仪光路图Fig.1Light path of dynamic interferometer 由干涉图空间位置不匹配导致的相位恢复误差,称之为失配误差[11],可以表示为Δφ=1+cos 2φ4éëêùûú∂φ∂x ()Δx 0+Δx 2+∂φ∂y ()Δy 0+Δy 2+1-cos 2φ4éëêùûú∂φ∂x ()Δx 1+Δx 3+∂φ∂y ()Δy 1+Δy 3,(1)式中φ表示待测相位,()Δx n ,Δy n 表示第n 幅干涉图引入的x 方向以及y 方向的空间位置匹配误差。
因此,在解算待测相位前需要对4幅移相干涉图的空间位置进行配准。
除此以外,系统中的移相器件引入的移相量误差会导致测量误差。
一些采用了类似动态干涉系统结构的误差分析已经表明[21-22],最主要的误差源就是作为空间移相器的偏振器件的加工或放置偏差,而其他偏振器件导致的测量误差微乎其微。
系统中偏振片透光轴方位角误差只改变干涉图的对比度,不会产生移相量误差;理想情况下,系统中作为移相器的延迟阵列4个子波片快轴均沿水平方向,由于加工和装调的原因,快轴方位角存在偏差,由快轴方位角偏差Δθn 引入的移相量误差Δδn 1可以表示为[12]Δδn 1=Δθn ·cos δn 2-2cos δn ·éëêùûúsin æèçöø÷arctan sin δn cos δn -1-sin δn ,n =0,1,2,3,(2)式中δn 表示延迟量的名义值,令子波片自身的延迟量误差为Δδn 2,则干涉图光强可以表示为I n =s 0éëêùûú1+V cos æèöøφ+n π2+Δδn ,n =0,1,2,3,(3)式中s 0表示入射光强,V 为调制度,φ为待测相位,Δδn =Δδn 1+Δδn 2。