桥式起重机控制系统设计毕业论文
桥式起重机变频调速控制系统设计论文(含中英文翻译)

前言桥式起重机作为物料搬运机械在整个国民经济中有着十分重要的地位,经过几十年的发展,我国桥式起重机制造厂和使用部门在设计、制造工艺、设备使用维修、管理方面,不断积累经验,不断改造,推动了桥式起重机的技术进步。
但在实际使用中,传统桥式起重机的控制系统所采用交流绕线转子串电阻的方法进行启动和调速,继电—接触器控制,在工作环境差,工作任务重时,电动机以及所串连电阻烧损和断裂故障时有发生;继电—接触器控制系统可靠性差,操作复杂,故障率高;转子串电阻调速,机械特性软,负载变化时转速也变化,调速不理想。
所串连电阻长期发热,电能浪费大,效率低。
要从根本上解决这些问题,只有彻底改变传统的控制方式。
近年来,随着计算机技术和电力电子器件的迅猛发展,同时也带动电气传动和自动控制领域的发展。
其中,具有代表性的交流变频调速装置和可编程控制器获得了广泛的应用,为PLC控制的变频调速技术在桥式起重机系统提供了有利条件。
变频技术的运用使得起重机的整体特性得到较大提高,可以解决传统桥式起重机控制系统存在诸多的问题,变频调速以其可靠性好,高品质的调速性能、节能效益显著的特性在起重运输机械行业中具有广泛的发展前景。
本次设计采用PLC和变频器技术,以PLC控制变频器,即以程序控制取代继电—接触器控制,控制变频器实现变频调速,设计出PLC控制的桥式起重机的变频调速系统,进而实现了起重机的半自动化控制。
此系统特别适用于桥式起重机在恶劣条件下的工作情况,对改善桥式起重机的调速性能,提高工作效率和功率因数,减小起制动冲击以及增加起重机使用的安全可靠性是非常有益的。
桥式起重机变频调速控制系统设计1 绪论1.1 桥式起重机电气传动技术的国内外发展概况电气调速控制的方法很多,对直流驱动来讲60年代采用发电机—电机系统。
从控制电阻分级控制,到交磁放大控制,到可控硅SCR激磁控制,到主回路可控硅即晶闸管整流供电系统。
随着电子技术的飞速发展,集成模块出现,计算机、微处理器应用,因此控制从分立组成模拟量控制发展至今天的数字量控制。
起重机毕业设计毕业论文
起重机毕业设计毕业论文摘要本文主要介绍了桥式起重机的整体设计理论和设计过程其中重点设计了桥式起重机的起升机构和运行机构主要包括桥式起重机小车运行机构的整体设计及传动机构的布置起升机构的计算小车运行机构计算还有起升机构卷筒组的设计计算和吊钩组的设计计算还有轴承的选择联轴器的选择电动机的选择减速器的选择和校核关键词桥式起重机起重机小车卷筒吊钩AbstractThis article mainly introduced the entire design theory and design process of bridge-type hoist cranewhich focused on the design of the bridge crane hoisting mechanism and operation of institutionsIncluding major bridge crane car running in the overall design and layout of the transmission mechanismthe lifting bodiesagencies calculate car runningSince there are groups or institutions reel and hook the design and calculation of the design groupand the choice of bear and couplingthe choice of motorthe choice and checking of reducerKey words bridge-type hoist cranecrane trolleyreelhook目录摘要IAbstract II第1章绪论 111 课题背景 112 起重机的发展史 113 垃圾搬运起重机的发展背景及现状 114 起重机的发展趋势 2com 大型化和专用化 2com 模块化和组合化 3com 轻型化和多样化 3com 自动化和智能化 4com 成套化和系统化 5com 新型化和实用化 5com 垃圾搬运起重机设计的主要工作 6 第2章桥式垃圾搬运起重机的概况 721 桥式垃圾搬运起重机的功用 722 桥式垃圾搬运起重机的结构 7 com 升起结构 7com 起重机运行机构 7com 桥架的金属结构 8com 垃圾抓斗 823 垃圾搬运起重机作为非标特种起重机具有的特点 924 本章小结 9第3章起升小车的设计 1031 起升机构计算 10com 钢丝绳 10com 电动机 12com 减速器 13com 制动器 15com 联轴器 16com 起制动时间验算 17com 卷筒 19com 钢丝绳在卷筒上的固定 2132 运行机构计算 22com 运行阻力的计算 23com 电动机的选择 24com 减速器的选择 27com 制动器的选择 28com 联轴器的选择 28com 运行打滑验算 2933 本章小结 30第4章大车运行机构的设计 3241 运行阻力的计算 32com 摩擦阻力Fm 32com 坡道阻力Fp 33com 风阻力Fw 3342 电动机的选择 33com 电动机的静功率 33com 电动机初选 33com 电动机的过载校验 34com 电动机的发热校验 35com 起动时间与起动平均加速度验算 35 43 减速器的选择 36com 减速器的传动比 36com 标准减速器的选用 3644 制动器的选择 3645 联轴器的选择 3746 运行打滑计算 38com 起动时按下式验算 38com 制动时按下式验算 3847 本章小结 39第5章主动轴及车轮的设计计算 4051 轴的概述 40com 轴的用途 40com 轴设计的主要内容 40com 轴的材料 4052轴的设计及其校核 40com 拟定轴上零件的装配方案 40 com 轴的强度计算 4153 小车驱动机构主动轴的设计 4254 车轮的计算 44com 车轮踏面疲劳计算载荷 44 com 车轮踏面疲劳计算 4455 本章小结 46第6章主梁的设计计算 4761 作用于主梁上的载荷 4762 计算载荷及其组合 4763 主梁的强度计算 4864 主梁的刚度计算 5165 疲劳计算 5266 本章小结 52结论 53致谢 54参考文献 55附录1 56附录2 60第1章绪论11 课题背景在德国美国日本及芬兰等发达国家半自动和全自动控制的垃圾抓斗起重机已经形成系列产品广泛应用于垃圾焚烧工程国外提供垃圾搬运起重机的厂商主要有芬兰KONE德国DEMAG美国PH法国REEL等公司种类分为手动半自动及全自动控制等3个等级单机日处理垃圾量从250~3000t而我国在环保产品生产及环保技术开发等领域仍以常规技术通用产品占主导地位与国外技术之间存在的巨大差距单机处理垃圾量则只有250-1500td在我国坚持走可持续发展道路的方针越来越注视环境保护的大前提下已经远远不能满足国内环保产业的发展要求相信在不久的将来垃圾搬运起重机会随着国内垃圾焚烧发电厂的蓬勃发展而迅速占有广大的环保产业市场12 起重机的发展史中国古代灌溉农田用的桔是臂架型起重机的雏形14世纪西欧出现了人力和畜力驱动的转动臂架型起重机19世纪前期出现了桥式起重机起重机的重要磨损件如轴齿轮和吊具等开始采用金属材料制造并开始采用水力驱动19世纪后期蒸汽驱动的起重机逐渐取代了水力驱动的起重机20世纪20年代开始由于电气工业和内燃机工业迅速发展以电动机或内燃机为动力装置的各种起重机基本形成13垃圾搬运起重机的发展背景及现状作为特种专用型起重机的一种垃圾搬运起重机的产生和发展必定符合其新兴的环境背景由于各国工业的迅猛发展城市人口剧增使大量的工业垃圾和生活垃圾成为地球公害面对垃圾滥成灾的现实世界各国的视线已从如何控制和销毁垃圾转变为着手科学地处理利用垃圾将垃圾列为维持经济持续发展的第二资源向垃圾要资源要能源要效益从生态环境角度看垃圾虽然是一种污染源从资源角度看它却是地球上唯一在增长的资源一种潜在的资源经科学家计算垃圾中的2次能源物质有机可燃物含热量多热值高每燃烧2t垃圾可获得相当于燃烧1t煤的热量而且垃圾焚烧处理后的灰渣呈中性无气味不会引发2次污染且体积减少90%重量减少75%以上明显减容减量如果措施得当利用1 t垃圾可获得约300~400kW的电力生产能力抓斗桥式垃圾搬运起重机作为一种专用型起重机将伴随着全球对环境保护观念的深入和环保产业的迅猛发展而得到广泛的应用并且正向着半自动化和全自动化的更加先进的方向发展14起重机的发展趋势com 大型化和专用化由于工业生产规模的不断扩大生产效率日益提高以及产品生产过程中物料装卸搬运费用所占比例逐渐增加促使大型或高速起重机的需求量不断增长起重量越来越大工作速度越来越高并对能耗和可靠性提出更高的要求起重机已成为自动化生产流程中的重要环节起重机不但要容易操作容易维护而且安全性要好可靠性要高要求具有优异的耐久性无故障性维修性和使用经济性目前世界上最大的浮游起重机起重量达6500t最大的履带起重机起重量达3000t最大的桥式起重机起重量为1200t集装箱岸边装卸桥小车的最大运行速度已达350mmin堆垛起重机最大运行速度是240mmin垃圾处理用起重机的起升速度达100mmin工业生产方式和用户需求的多样性使专用起重机的市场不断扩大品种也不断更新以特有的功能满足特殊的需要发挥出最佳的效用例如冶金核电造纸垃圾处理的专用起重机防爆防腐绝缘起重机和铁路船舶集装箱专用起重机的功能不断增加性能不断提高适应性比以往更强德国德马格公司研制出一种飞机维修保养的专用起重机在国际市场打开了销路这种起重机安装在房屋结构上跨度大起升高度大可过跨停车精度高在起重小车下面安装有多节伸缩导管与飞机维修平台相连并可作360度旋转通过大车和小车的位移导管的升降与旋转可使维修平台到达飞机的任一部位进行飞机的维护和修理极为快捷方便com和组合化用模块化设计代替传统的整机设计方法将起重机上功能基本相同的构件部件和零件制成有多种用途有相同联接要素和可互换的标准模块通过不同模块的相互组合形成不同类型和规格的起重机对起重机进行改进只需针对某几个模块设计新型起重机只需选用不同模块重新进行组合可使单件小批量生产的起重机改换成具有相当批量的模块生产实现高效率的专业化生产企业的生产组织也可由产品管理变为模块管理达到改善整机性能降低制造成本提高通用化程度用较少规格数的零部件组成多品种多规格的系列产品充分满足用户需求目前德国英国法国美国和日本的著名起重机公司都已采用起重机模块化设计并取得了显著的效益德国德马格公司的标准起重机系列改用模块化设计后比单件设计的设计费用下降12生产成本下降45经济效益十分可观德国德马格公司还开发了一种KBK柔性组合式悬挂起重机起重机的钢结构由冷轧型轨组合而成起重机运行线路可沿生产工艺流程任意布置可有叉道转弯过跨变轨距所有部件都可实现大批量生产再根据用户的不同需求和具体物料搬运路线在短时间内将各种部件组合搭配即成这种起重机组合性非常好操作方便能充分利用空间运行成本低有手动自动多种形式还能组成悬挂系统单梁悬挂起重机双梁悬挂起重机悬臂起重机轻型门式起重机及手动堆垛起重机甚至能组成大型自动化物料搬运系统com 轻型化和多样化有相当批量的起重机是在通用的场合使用工作并不很繁重这类起重机批量大用途广考虑综合效益要求起重机尽量降低外形高度简化结构减小自重和轮压也可使整个建筑物高度下降建筑结构轻型化降低造价因此电动葫芦桥式起重机和梁式起重机会有更快的发展并将大部分取代中小吨位的一般用途桥式起重机德国德马格公司经过几十年的开发和创新已形成了一个轻型组合式的标准起重机系列起重量为1-63吨工作级别为A1-A7整个系列由工字形和箱型单梁悬挂箱形单梁角形小车箱形单梁和箱形双梁等多个品种组成主梁与端梁相接以及起重小车的布置有多种型式可适合不同建筑物及不同起吊高度的要求根据用户需要每种规格起重机都有三种单速及三种双速供任意选择还可以选用变频调速操纵方式有地面手电门自行移动手电门随小车移动手电门固定无线遥控司机室固定司机室随小车移动司机室自行移动等七种选择大车及小车的供电有电缆小车导电DVS系统两种方式如此多的选择项通过不同的组合可搭配成百上千种起重机充分满足用户不同的需求这种起重机的另一最大优点是轻型化自重轻轮压轻外形尺寸高度小可大大降低厂房建筑物的建造成本同时也可减小起重机的运行功率和运行成本与通用产品相比较起重量为10t跨度225m通用双梁桥式起重机自重是24t起重机轨面以上高度1876mm起重机宽度5980mm 德马格起重机的自重只有87t重量轻了176起重机轨面以上高度为920mm降低了104起重机宽度为2980mm外形尺寸减少了100com 自动化和智能化起重机的更新和发展在很大程度上取决于电气传动与控制的改进将机械技术和电子技术相结合将先进的计算机技术微电子技术电力电子技术光缆技术液压技术模糊控制技术应用到机械的驱动和控制系统实现起重机的自动化和智能化大型高效起重机的新一代电气控制装置已发展为全电子数字化控制系统主要由全数字化控制驱动装置可编程序控制器故障诊断及数据管理系统数字化操纵给定检测等设备组成变压变频调速射频数据通讯故障自诊监控吊具防摇的模糊控制激光查找起吊物重心近场感应防碰撞技术现场总线载波通讯及控制无接触供电及三维条形码技术等将广泛得到应用使起重机具有更高的柔性以适合多批次少批量的柔性生产模式提高单机综合自动化水平重点开发以微处理机为核心的高性能电气传动装置使起重机具有优良的调速和静动特性可进行操作的自动控制自动显示与记录起重机运行的自动保护与自动检测特殊场合的远距离遥控等以适应自动化生产的需要例如采用激光装置查找起吊物的重心位置在取物装置上装有超声波传感器引导取物装置自动抓取货物吊具自动防摇系统能在运行速度200m/min加速度05m2/s的情况下很快使起吊物摇摆振幅减至几个毫米起重机可通过磁场变换器或激光达到高精度定位起重机上安装近场感应系统可避免起重机之间的互相碰撞起重机上还安装了微机自诊断监控系统该系统能提供大部分常规维护检查内容如齿轮箱油温油位车轮轴承温度起重机的载荷应力和振动情况制动器摩擦衬片的寿命及温度状况等com 成套化和系统化在起重机单机自动化的基础上通过计算机把各种起重运输机械组成一个物料搬运集成系统通过中央控制室的控制与生产设备有机结合与生产系统协调配合这类起重机自动化程度高具有信息处理功能可将传感器检测出来的各种信息实施存储运算逻辑判断变换等处理加工进而向执行机构发出控制指令这类起重机还具有较好的信息输入输出接口实现信息全部准确可靠地在整个物料搬运集成系统中的传输起重机通过系统集成能形成不同机种的最佳匹配和组合取长补短发挥最佳效用目前重点发展的有工厂生产搬运自动化系统柔性加工制造系统商业货物配送集散系统集装箱装卸搬运系统交通运输和邮电部门行包货物的自动分拣与搬运系统等例如生产工程机械的美国卡特皮勒公司金属结构厂购置了一条以桥式起重机为主的物料自动搬运系统用于钢板的喷丸处理切割和入库的自动装卸搬运作业比原先采用单机操作工作效率提高了65日本东芝浜川崎工厂用全自动桥式起重机组成的物料输送系统来搬运柔性加工线上的夹具和工件为机床运送毛坯或将加工好的零件送到下一工序或仓库这些在空间移动的起重机搬运系统代替了过去通常使用的自动导向搬运车使车间的地面面积得到充分利用com 新型化和实用化结构方面采用薄壁型材和异形钢减少结构的拼接焊缝提高抗疲劳性能采用各种高强度低合金钢新材料提高承载能力改善受力条件减轻自重和增加外形美观桥式起重机的桥架结构型式大多采用箱形四梁结构主梁与端梁采用高强度螺栓联接便于运输与安装在机构方面进一步开发新型传动零部件简化机构三合一运行机构是当今世界轻中级起重机运行机构的主流将电动机减速器和制动器合为一体具有结构紧凑轻巧美观拆装方便调整简单运行平稳配套范围大等优点国外已广泛应用到各种起重机运行机构上为使中小吨位的起重小车结构尽量简化同时降低起重机的尺寸高度减小轮压国外已大量采用电动葫芦作为起升机构为了减轻自重提高承载能力改善加工制造条件增加产品成品率零部件尽量采用以焊代铸如减速器壳体卷简滑轮等都用焊接结构减速器齿轮都采用硬齿面以减轻自重减小体积提高承载能力增加使用寿命液压推杆盘式制动器的应用范围也越来越大此外各机构采用的电动机都向高转速发展从而减小电机基座号减轻重量与减小外形尺寸并可配用制动力矩小的制动器在电控方面开发性能好成本低可靠性高的调速系统和电控系统发展半自动和全自动操纵采用机电仪液一体化技术提高使用性能和可靠性增加起重机的功能今后会更加注重起重机的安全性研制新型安全保护装置重视司机的工作条件应用人体工程学设计司机室降低司机的劳动强度德国近年为解决起重机吊钩的防摆控制开发了模糊逻辑电路的控制技术用神经信息和模糊技术来寻找开始加速的最佳时刻将有经验司机防摆实际操作的数据输入系统实现最优控制模糊控制方式能确定实施自动工作的控制指令将人们主观上的模糊量通过模糊集合进行数字化定量再利用计算机实现像熟练司机一样的自如操作取得了更高的效率和安全性模糊控制作为新的控制方法已引人注目com 垃圾搬运起重机设计的主要工作本次设计针对小车的起升机构及运行机构桥架运行机构的部件进行选型设计校核了小车运行机构的主动车轮组和卷筒确定选用了主梁截面尺寸通过一系列的设计不仅有效得减轻了起重机的自重更使起重机的结构简洁可靠驱动机构达到同步起升重物高速平稳第2章桥式垃圾搬运起重机的概况21桥式垃圾搬运起重机的功用桥式起重机是桥架在高架轨道上运行的一种桥架型起重机又称天车桥式起重机的桥架沿铺设在两侧高架上的轨道纵向运行起重小车沿铺设在桥架上的轨道横向运行构成一矩形的工作范围就可以充分利用桥架下面的空间吊运物料不受地面设备的阻碍垃圾搬运起重机是用于城市生活垃圾焚烧发电厂垃圾处理的特种抓斗桥式起重机是城市生活垃圾焚烧厂垃圾供料系统的核心设备位于垃圾贮存坑的上方主要承担垃圾的投料搬运搅拌取物和称量工作22 桥式垃圾搬运起重机的结构垃圾搬运起重机一般由起重小车桥架运行机构桥架金属结构组成起重小车又由起升机构小车运行机构和小车架三部分组成com 升起结构为起升机构包括电动机制动器减速器卷筒和滑轮组电动机通过减速器带动卷筒转动使钢丝绳绕上卷筒或从卷筒放下以升降重物小车架是支托和安装起升机构和小车运行机构等部件的机架通常为焊接结构起重机运行机构的驱动方式可分为两大类一类为集中驱动即用一台电动机带动长传动轴驱动两边的主动车轮另一类为分别驱动即两边的主动车轮各用一台电动机驱动中小型桥式起重机较多采用制动器减速器和电动机组合成一体的三合一驱动方式大起重量的普通桥式起重机为便于安装和调整驱动装置常采用万向联轴器com 起重机运行机构起重机运行机构一般只用四个主动和从动车轮如果起重量很大常用增加车轮的办法来降低轮压当车轮超过四个时必须采用铰接均衡车架装置使起重机的载荷均匀地分布在各车轮上com 桥架的金属结构桥架的金属结构由主粱和端粱组成分为单主粱桥架和双粱桥架两类单主粱桥架由单根主粱和位于跨度两边的端粱组成双粱桥架由两根主粱和端粱组成主粱与端粱刚性连接端粱两端装有车轮用以支承桥架在高架上运行主粱上焊有轨道供起重小车运行桥架主粱的结构类型较多比较典型的有箱形结构四桁架结构和空腹桁架结构箱形结构又可分为正轨箱形双粱偏轨箱形双粱偏轨箱形单主粱等几种正轨箱形双粱是广泛采用的一种基本形式主粱由上下翼缘板和两侧的垂直腹板组成小车钢轨布置在上翼缘板的中心线上它的结构简单制造方便适于成批生产但自重较大偏轨箱形双粱和偏轨箱形单主粱的截面都是由上下翼缘板和不等厚的主副腹板组成小车钢轨布置在主腹板上方箱体内的短加劲板可以省去其中偏轨箱形单主粱是由一根宽翼缘箱形主粱代替两根主粱自重较小但制造较复杂四桁架式结构由四片平面桁架组合成封闭型空间结构在上水平桁架表面一般铺有走台板自重轻刚度大但与其他结构相比外形尺寸大制造较复杂疲劳强度较低已较少生产空腹桁架结构类似偏轨箱形主粱由四片钢板组成一封闭结构除主腹板为实腹工字形粱外其余三片钢板上按照设计要求切割成许多窗口形成一个无斜杆的空腹桁架在上下水平桁架表面铺有走台板起重机运行机构及电气设备装在桥架内部自重较轻整体刚度大这在中国是较为广泛采用的一种型式com 垃圾抓斗垃圾抓斗是垃圾焚烧场供料系统核心设备垃圾搬运起重机的辅助设备它负责给垃圾焚烧炉供料并承担搬运搅拌贮坑中垃圾的作业等其充分利用垃圾贮坑的容量使坑内垃圾充分发酵且成分均匀抓斗的工作环境恶劣工作负荷繁重维护保养困难易发生故障一旦抓斗出现故障影响垃圾焚烧炉的供料将造成垃圾焚烧场的停运甚至可能造成城市生活垃圾收集清运系统的混乱正确选择垃圾的抓斗非常重要垃圾抓斗从结构形式上分为蚌壳式和爪瓣式从驱动方式上分为机械式和液压式爪式液压抓斗为多瓣结构靠液压缸直接驱动爪瓣实现开闭动作切取容积大抓取力大防摆性好对不均匀斜面垃圾效果好应用广泛起重机上小车无需增加驱动抓斗机构小车体积小灵活四吊点六瓣液压抓斗带有自动开启闭合及倾斜控制系统由上海起帆·佩纳公司供货采用德国PEINER技术制造液压中心从德国进口并采用380V交流电压驱动液压缸位于抓斗外侧便于检修且每个液压缸上都安装防尘罩抓斗供电采用与起升卷筒同步传动的电缆卷筒布置在小车上称量系统进行实时的动态称量具有超载报警计量和统计打印功能称量传感器安装在小车钢丝绳卷筒轴承底座下方23 垃圾搬运起重机作为非标特种起重机具有的特点1工作环境恶劣温度高湿度大灰尘多气体腐蚀性强2工作载荷繁重年平均工作时间8000h满载率高工作频繁3维护保养困难工作环境恶劣垃圾腐烂的多种有害气体增加了工作难度4可靠性要求高如起重机出现故障无法及时弥补将影响焚烧炉进料造成垃圾焚烧场瘫痪24 本章小结本章简要介绍了垃圾搬运起重机的结构形态功用和特点等概况垃圾搬运起重机作为非标特种桥式起重机具有所有桥式起重机的共性和技术条件要求同时。
PLC和变频器桥式起重机控制系统设计毕业设计

PLC和变频器桥式起重机控制系统设计毕业设计毕业设计题目:PLC和变频器桥式起重机控制系统设计摘要:本文以桥式起重机为研究对象,通过PLC和变频器控制系统设计,实现对桥式起重机的自动化控制。
首先,对桥式起重机的工作原理和结构进行了详细介绍;然后,分析了PLC和变频器在桥式起重机控制系统中的优势和应用;最后,进行了PLC和变频器桥式起重机控制系统设计。
关键词:桥式起重机;PLC;变频器;控制系统;自动化一、引言桥式起重机是一种非常常见的起重设备,广泛应用于工厂、码头、港口等场所。
它具有运载能力强、工作灵活、结构稳定等特点。
目前,为了提高桥式起重机的操作效率和安全性,许多企业将自动化控制引入到桥式起重机中。
二、桥式起重机的工作原理和结构桥式起重机一般由桥架、行车和起重机构等组成。
工作时,起重机电机通过驱动机构提供动力。
起重机构由卷筒、悬挂系统和钩组成。
具体工作原理和结构可参考相关教材。
三、PLC和变频器在桥式起重机控制系统中的应用PLC和变频器作为现代自动化控制的重要组成部分,广泛应用于桥式起重机控制系统中。
PLC主要负责控制逻辑的实现,如控制起升、小车前后移动、大车左右移动等操作;变频器则用于控制电机的转速,实现对起重机各部分的精确控制和调速。
四、PLC和变频器桥式起重机控制系统设计1.系统硬件设计根据桥式起重机的实际需求和控制要求,选择合适的PLC和变频器设备,并搭建起相应的控制系统硬件平台。
2.系统软件设计利用PLC编程软件进行控制逻辑的设计和实现,包括起升、小车前后移动、大车左右移动等操作的代码编写。
同时,利用变频器的调试软件,设置合适的参数,实现电机的精确调速。
3.系统测试和调试将设计好的控制系统连接到实际的桥式起重机上,进行系统的测试和调试。
通过不断调整参数,检查系统运行状态,确保系统性能满足要求。
五、总结通过本文的研究,我们成功设计出了基于PLC和变频器的桥式起重机控制系统。
该控制系统具有自动化程度高、操作灵活、性能稳定等优点,可以提高桥式起重机的工作效率和安全性。
桥式起重机控制系统毕业设计

2.1 桥式起重机的结构......................................................................................................5 2.1.1 机械结构组成......................................................................................................5 2.1.2 电气控制系统......................................................................................................7
ABSTRACT................................................................................................................ 2
第一章 绪 论........................................................................................................ 3
4.2.3 升降机控制程序.....................................................................................................29 4.2.4 升降机悬停/启动控制程序............................................................................33 4.2.5 设备变频器控制程序......................................................................................33 4.2.6 升降机变频器控制程序..................................................................................36 4.2.7 其他功能控制程序..........................................................................................38
桥式起重机毕业设计
第一章绪论由于工业生产规模不断扩大,生产效率日益提高,以及产品生产过程中物料装卸搬运费用所占比例逐渐增加,促使大型或高速起重机的需求量不断增长,起重量越来越大,工作速度越来越高,并对能耗和可靠性提出更高的要求。
起重机已成为自动化生产流程中的重要环节。
起重机不但要容易操作,容易维护,而且安全性要好,可靠性要高,要求具有优异的耐久性、无故障性、维修性和使用经济性,起重机的出现大大提高了人们的劳动效率,以前需要许多人花长时间才能搬动的大型物件现在用起重机就能轻易达到效果,尤其是在小范围的搬动过程中起重机的作用是相当明显的。
在工厂的厂房内搬运大型零件或重型装置桥式起重机是不可获缺的。
桥式起重机作为物料搬运机械在整个国民经济中有着十分重要的地位。
经过几十年的发展,我国桥式起重机制造厂和使用部门在设计、制造工艺,设备使用维修、管理方面,不断积累经验,不断改造,推动了桥式起重机的技术进步。
本论文主要通过电气系统的设计使5t桥式起重机规定的各种运动要求。
现根据起重机的新理论、新技术和新动向,结合实例,简要论述国外先进起重机的特点和发展趋势。
1.1起重机的特点和发展趋势现根据起重机的新理论、新技术和新动向,结合实例,简要论述国外先进起重机的特点和发展趋势。
1.1.1大型化和专用化由于工业生产规模的不断扩大,生产效率日益提高,以及产品生产过程中物料装卸搬运费用所占比例逐渐增加,促使大型或高速起重机的需求量不断增长。
起重量越来越大,工作速度越来越高,并对能耗和可靠性提出更高的要求。
起重机已成为自动化生产流程中的重要环节。
起重机不但要容易操作,容易维护,而且安全性要好,可靠性要高,要求具有优异的耐久性、无故障性、维修性和使用经济性。
目前世界上最大的浮游起重机起重量达6,500t,最大的履带起重机起重量达3,000t,最大的桥式起重机起重量为1,200t,集装箱岸边装卸桥小车的最大运行速度已达350m/min,堆垛起重机最大运行速度是240m/min,垃圾处理用起重机的起升速度达100m/min 。
桥式起重机毕业设计论文

1绪论1.1起重机的介绍箱形双梁桥式起重机是由一个有两根箱形主梁和两根横向端梁构成的双梁桥架,在桥架上运行起重小车,可起吊和水平搬运各类物体,它适用于机械加工和装配车间料场等场合。
1.2起重机设计的总体方案本次起重机设计的主要参数如下:起重量10t,跨度16.5m,起升高度为10m起升速度8m/min小车运行速度v=40m/min大车运行速度V=90m/min大车运行传动方式为分别传动;桥架主梁型式,箱形梁.小车估计重量4t,起重机的重量16.8t .工作类型为中级。
根据上述参数确定的总体方案如下:主梁的设计:主梁跨度16.5m ,是由上、下盖板和两块垂直的腹板组成封闭箱形截面实体板梁连接,主梁横截面腹板的厚度为6mm,翼缘板的厚度为10mm,主梁上的走台的宽度取决于端梁的长度和大车运行机构的平面尺寸,主梁跨度中部高度取H=L/17 ,主梁和端梁采用搭接形式,主梁和端梁连接处的高度取H0=0.4-0.6H,腹板的稳定性由横向加劲板和,纵向加劲条或者角钢来维持,纵向加劲条的焊接采用连续点焊,主梁翼缘板和腹板的焊接采用贴角焊缝,主梁通常会产生下挠变形,但加工和装配时采用预制上拱。
小车的设计:小车主要有起升机构、运行机构和小车架组成。
起升机构采用闭式传动方案,电动机轴与二级圆柱齿轮减速器的高速轴之间采用两个半齿联轴器和一中间浮动轴联系起来,减速器的低速轴鱼卷筒之间采用圆柱齿轮传动。
运行机构采用全部为闭式齿轮传动,小车的四个车轮固定在小车架的四周,车轮采用带有角形轴承箱的成组部件,电动机装在小车架的台面上,由于电动机轴和车轮轴不在同一个平面上,所以运行机构采用立式三级圆柱齿轮减速器,在减速器的输入轴与电动机轴之间以及减速器的两个输出轴端与车轮轴之间均采用带浮动轴的半齿联轴器的连接方式。
小车架的设计,采用粗略的计算方法,靠现有资料和经验来进行,采用钢板冲压成型的型钢来代替原来的焊接横梁。
端梁的设计:端梁部分在起重机中有着重要的作用,它是承载平移运输的关键部件。
桥式起重机电气控制毕业设计论文
275T/50橋式起重機電氣控制設計摘要橋式起重機是橋架在高架軌道上運行的一種橋架型起重機,又稱天車。
橋式起重機的橋架沿鋪設在兩側高架上的軌道縱向運行,起重小車沿鋪設在橋架上的軌道橫向運行,構成一矩形的工作範圍,就可以充分利用橋架下麵的空間吊運物料,不受地面設備的阻礙。
橋式起重機廣泛地應用在室內外倉庫、廠房、碼頭和露天貯料場等處。
橋式起重機可分為普通橋式起重機、簡易粱橋式起重機和冶金專用橋式起重機三種。
普通橋式起重機一般由起重小車、橋架運行機構、橋架金屬結構組成。
起重小車又由起升機構、小車運行機構和小車架三部分組成。
起升機構包括電動機、制動器、減速器、捲筒和滑輪組。
電動機通過減速器,帶動捲筒轉動,使鋼絲繩繞上捲筒或從捲筒放下,以升降重物。
本文重點研究起重機的控制,通過使用串電阻的調速方法已實現對電機的控制,從而控制起重機。
關鍵字:起重小車;電動機;串電阻調速275T/50 bridge crane electrical control designABSTRACTBridge crane is a bridge in an elevated running track as a bridge-type crane, also known as Crane。
Bridge crane installed in the bridge along the track on both sides of the elevated vertical run,Lifting trolley along the bridge on the laying of the track in the horizontal run, which constitute the scope of work of a rectangle, you can take full advantage of the space bridge was being lifted the following materials, the hindered from ground equipment.Bridge crane widely used in indoor and outdoor warehouses, factories, docks and outdoor storage yard, etc.Bridge crane bridge crane can be divided into ordinary, simple beam bridge crane and metallurgical three special bridge crane.Lifting bodies, including the motor, brake, reducer, drum and pulle y blocks。
毕业论文:桥式起重机运行机构设计(终稿)
摘要本文主要介绍了桥式起重机的整体设计理论和设计过程,其中重点设计了桥式起重机的运行机构起升机构等,主要包括桥式起重机小车运行机构的整体设计及传动机构的布置,小车运行机构计算。
还有轴承的选择、联轴器的选择、电动机的选择、减速器的选择和校核。
关键词:桥式起重机;起重机小车;卷筒;减速器。
AbstractThis article mainly introduced the entire design theory and design process of bridge-type hoist crane,which focused on the design of the bridgecrane operation of institutions and hoisting mechanism.The overalldesign that mainly includes the bridge type derrick small car to circulate organization and spread the decoration that the motive reaches, the small car circulates an organization calculation.Still have the choice of the choice, electric motor of the choice, allied stalk machine of bearings, decelerate machine of choice and pit in the school.Keyword:Bridge type derrick;The derrick small car;Book tube;Decelerate a machine.目录摘要 (1)Abstract (2)第一章概述 (6)1.1概论 (6)1.2起重机介绍 (6)1.2.1起重机的类型及特点 (7)1.3桥式起重机发展概述 (7)1.3.1国外桥式起重机发展动向 (7)1.3.2国内桥式起重机发展动向 (8)第二章桥式起重介绍 (8)2.1 桥式起重机的特点和分类 (9)2.1.1 通用桥式起重机 (9)2.1.2专用桥式起重机 (9)2.1.3 电动葫芦型桥式起重机 (10)2.2桥式起重机的组成和特点 (11)2.2.1桥式起重机小车 (11)2.2.3桥式起重机小车运行传动机构 (11)2.3 桥式起重机运行机设计的目的;内容和要求 (11)2.3.1设计目的 (11)2.3.2设计内容 (12)2.3.3设计要求 (12)第三章小车运行机构的计算 (13)3.2 选择车轮与轨道并验算起强度 (14)3.3 运行阻力的计算 (16)3.4 选择电动机 (16)3.5 验算电动机发热条件 (17)3.6 选择减速器 (18)3.7 验算运行机构速度和实际所需功率 (18)3.8 验算启动时间 (18)3.9 按起动工况校核减速器功率 (19)3.10验算起动不打滑条件 (19)3.11 选择制动器 (20)3.12 演算制动不打滑条件 (21)3.13选择联轴器 (21)3.14 演算低速浮动轴强度 (22)第四章大车运行机构的计算 (24)4.1设计的基本原则和要求 (24)4.1.1 机构传动方案 (24)4.1.2 大车运行机构具体布置的主要问题 (24)4.2大车运行机构的计算 (25)4.2.2 选择车轮与轨道,并验算其强度 (26)4.2.3 运行阻力计算 (28)4.2.4 选择电动机 (28)4.2.5 验算电动机的发热功率条件 (29)4.2.6 减速器的选择 (29)4.2.7 验算运行速度和实际所需功率 (30)4.2.8 验算起动时间 (31)4.2.9 起动工况下校核减速器功率 (31)4.2.10 验算启动不打滑条件 (32)4.2.11 选择制动器 (33)4.2.12 选择联轴器 (34)4.2.13 浮动轴的验算 (35)第五章结论 (36)参考文献 (37)致谢 (37)参考资料 (38)第1章概述1.1 概论桥式起重机是桥架型起重机的一种,它依靠起升机构和在水平面内的两个相互垂直方向移动的运行机构,能在矩形场地及其上空作业,是工矿企业广泛使用的一种起重运输机械。
毕业设计plc控制桥式起重机

毕业设计plc控制桥式起重机PLC(可编程逻辑控制器)技术在工业自动化领域发挥着重要的作用,它具备可编程、易扩展、高可靠性等特点,被广泛应用于各种控制系统中。
在毕业设计中,我们选择了PLC控制桥式起重机作为研究对象,旨在通过PLC技术改进桥式起重机的控制系统,提高其性能和操作的安全性。
本文将对这一毕业设计的内容进行详细阐述,以供读者参考。
首先,我们将介绍桥式起重机的基本原理和结构。
桥式起重机是一种常用的起重设备,其具备在两端设置的大臂可自由移动的特点,可用于各种工业场所的货物搬运。
桥式起重机的主要组成部分包括:大臂、小臂、平台、滑轮组、电动机和控制系统等。
在起重过程中,控制系统起着至关重要的作用,它能够控制各个电动机的启停、速度调节以及起重机的方向等。
PLC控制桥式起重机的优势显而易见。
首先,PLC具备可编程的特点,可以根据实际需求编写程序,实现自动化控制。
其次,PLC系统易于扩展和维护,结构简单,可根据需求增加输入输出模块,提高系统的功能性。
另外,PLC还具有高可靠性和抗干扰能力,能够适应工业环境的特殊要求,确保起重机的操作安全。
在进行PLC控制桥式起重机的设计时,我们首先需要分析起重机系统的功能需求。
起重机的基本控制功能包括:起升、行走、旋转和变幅等。
我们需要编写PLC程序,实现对起重机各个部分电动机的控制,包括启停、正反转、速度调节等。
此外,我们还需考虑安全性因素,编写紧急停止、防撞、超载保护等程序,确保起重机操作的安全可靠。
在具体实施中,我们可以采用西门子、施耐德等知名PLC品牌的设备,结合相应的编程软件进行编写程序。
在编写程序时,需要考虑到桥式起重机的具体参数,如起升高度、最大载重量、行走速度等,并根据实际需求进行调整。
在程序编写完成后,需要进行严密的测试和调试,确保PLC控制桥式起重机能够完全满足设计要求。
总结起来,通过本次毕业设计,我们旨在通过PLC技术改进桥式起重机的控制系统,提高其性能和操作的安全性。
PLC和变频器桥式起重机控制系统设计毕业设计

1234学院毕业设计(论文)摘要随着现代控制理论的应用,微处理器和微电子技术的发展,使变频调速控制系统日趋成熟。
而桥式起重机作为物料搬运系统中一种典型设备,在企业生产活动中应用广泛作用显著,故对于提高其运行效率,确保运行安全,降低物料搬运成本是十分重要。
传统的桥式起重控制系统主要采用继电器接触器进行控制,采用交流绕线串电阻的方法进行启动和调速,这种控制系统存在可靠性差,故障率高,电能浪费大,效率低等缺点。
因此根据桥式起重机的运行特点,将可编程序控制器与变频器结合应用于桥式起重机控制系统,其中PLC系统则采用SIEMENS公司产品,大大提高了操作精度和稳定度;综合保护功能完善,便于及时发现、查找、处理故障;并且节约了能源。
关键词:可编程序控制器;桥式起重机;变频调速;变频器目录摘要 (I)第一章绪论 (1)1.1桥式起重机简介 (2)1.2 本课题设计的意义、主要内容及基本参数 (3)第二章矢量控制变频调速 (4)2.1 变频调速的基本原理 (4)2.2变频器的基本结构和功能 (7)2.2.1变频器的主电路 (7)2.2.2变频器的控制电路构成 (8)2.3变频调速的控制方式—矢量控制方式 (9)2.3.1矢量控制的基本思想 (9)2.3.2矢量变换规律 (11)2.3.3矢量变换下异步电动机的数学模型 (15)2.4矢量变换控制方程 (17)第三章桥式起重机变频控制系统的硬件设计 (19)3.1总体设计方法 (19)3.2 PLC技术简介 (21)3.2.1 PLC概述 (21)3.2.2 Siemens S7-200结构及工作原理 (22)3.3部件的选择 (24)3.3.1电机的选用 (24)3.3.2变频器的选用 (26)3.3.3 PLC的选用 (31)3.3.4常用辅件的选择 (31)3.4起重机变频调速系统设计 (34)3.4.1系统控制的要求 (34)3.4.2控制系统的1/O点及地址分配 (34)第四章桥式起重机变频调速系统软件设计 (40)4.1 S7-200PLC网络的通信协议 (40)4.1.1 S7-200PLC网络的通信协议的种类 (40)4.1.2本系统通信协议的选择 (41)4.2 PLC程序设计 (45)4.2.1 PLC编程软件概述 (45)4.2.2程序设计 (46)4.3系统抗干扰措施 (52)第五章结束语 (54)致谢.................................. 错误!未定义书签。
桥式起重机的变频调速--毕业设计论文
毕业设计(论文)论文题目:桥式起重机的变频调速系部:电气工程系专业:电机与电器班级: 2013级01班学生姓名:学号:指导教师:2016年05月06号摘要桥式起重机作为物料搬运系统中的一种典型设备,在工业生产中应用广泛,作用显著。
因此对于提高桥式起重机的运行效率,确保运行的安全可靠性,降低物料搬运成本是十分必要的。
本文根据桥式起重机大车运行的特点,采用分散驱动,结合变频调速技术,完成了桥式起重机固定三段频率的调速。
将PLC作为逻辑控制器,并且为其设计了梯形图,将凸轮控制器的信号作为PLC的输入信号,PLC的输出接中间继电器线圈,通过继电器的触点控制变频器的数字输入口实现与变频器相连的两台电动机的变频调速。
为了方便控制和应急处理,设计了起动、停止、故障复位和急停按钮。
同时可以将电动机铭牌相关参数输入到变频器,运用变频器的保护功能保护电路。
通过本设计可以控制电动机的起动、停止、运行方向、速度换挡和故障复位。
从而减少了传统继电—接触式控制系统的中间环节,减少了硬件和控制线,极大提高了系统的稳定性和可靠性。
关键词:桥式起重机,凸轮控制器,可编程序控制器,变频调速ABSTRACTBridge crane as a material handling system of a kind of typical equipment, is widely used in industrial production, significant role. Therefore to improve the operating efficiency of the bridge crane to ensure the safety and reliability of operation, reduce material handling costs is very necessary.The according to the characteristics of the crane operation, adopting the driving of disperse, combining with the technology of frequency conversion, completed the bridge crane fixed frequency speed control. The PLC as logic controller, and the design of the ladder diagram, the cam controller signal as the input signal of the PLC, the PLC output connected to an intermediate relay coil, through the contacts of the relay control of the digital converter input port and inverter connected two motor variable frequency speed regulation. In order to facilitate control and emergency treatment, the design of the starting, stop, reset the fault and emergency stop button. At the same time the motor nameplate parameters input to the inverter, Using inverter protection circuit protection. Through this design can control the motorstarting, stop, running direction, shift speed and fault reset. Thus reducing the traditional relay - contact type control system of intermediate links, reducing the hardware and control line, greatly improving the stability and reliability of the system.Key words: bridge crane cam controller programmable controller variable frequency speed regulation目录摘要 (I)目录 .......................................................................................................................... I III 第一章绪论. (1)1.1 桥式起重机电气传动技术的国内外发展概况 (1)1.2 传统桥式起重机控制系统存在的问题 (1)1.3 本课题的研究意义及主要内容 (2)1.4 本章小结 (3)第二章变频调速的原理 (4)2.1 交流异步电动机变频调速原理 (4)2.2 变频调速系统的控制方式 (4)2.3 变频器的基本结构 (5)2.4 本章小结 (9)第三章MM440与S7-200 (9)3.1 MM440变频器 (9)3.2 PLC系统组成与各部分的作用 (10)3.3 变频器和PLC的关系 (13)3.4 本章小结 (13)第四章桥式起重机大车变频调速系统设计 (15)4.1 桥式起重机大车组成及特点 (15)4.2 系统总体设计 (16)4.3 变频器参数设计及PLC的I/O分配 (18)4.4 变频器实现三段调速原理的解释 (20)4.5 PLC程序设计 (20)4.6 电器布置图和电气接线图 (21)4.7 本章小结 (24)第五章总结与展望 (25)致谢 (26)参考文献 (27)附录 (28)第一章绪论1.1、桥式起重机电气传动技术的国内外发展概况电气调速控制的方法很多,从控制电阻分级控制,到交磁放大控制,到可控硅SCR激磁控制,到主回路可控硅即晶闸管整流供电系统。
桥式起重机毕业设计论文

DQ型吊钩桥式起重机三维结构设计摘要随着我国制造业的发展,桥式起重机越来越多的应用到工业生产当中。
在工厂中搬运重物,机床上下件,装运工作吊装零部件,流水线上的定点工作等都要用到起重机。
起重机中种数量最多,在大小工厂之中均有应用的就是小吨位的起重机,小吨位的桥式起重机广泛的用于轻量工件的吊运,在我国机械工业中占有十分重要的地位。
但是,我国现在应用的各大起重机还是仿造国外落后技术制造出来的,而且已经在工厂内应用了多年,有些甚至还是七八十年代的产品,无论在质量上还是在功能上都满足不了日益增长的工业需求。
如何设计使其成本最低化,布置合理化,功能现代化是我们研究的课题。
本次设计就是对小吨位的桥式起重机进行设计,主要设计内容是QD型吊钩桥式起重机的三维造型结构设计,其中包括桥架结构的布置计算及校核,主梁结构的计算及校核,端梁结构的计算及校核,主端梁连接以及大车运行机构零部件的选择及校核。
关键词:起重机;大车运行机构;桥架;主端梁;小吨位ABSTRACTAs China's manufacturing industry, more and more applications crane to which industrial production. Carry a heavy load in the factory, machine parts up and down, the work of lifting parts of shipment, assembly line work should be fixed on the crane is used. The largest number of species of cranes, both in the size of the factory into the application is small tonnage cranes, bridge cranes small tonnage of lightweight parts for a wide range of lifting, in China's machinery industry plays a very important position. However, our current application, or copy large crane behind the technology produced abroad, and has been applied in the factory for many years, and some 70 to 80 years of products, both in quality or functionality are not growing to meet the industrial demand. How to design it the lowest cost, rationalize the layout, function modernization is the subject of our study. This design is for small tonnage bridge crane design, the main design elements are QD crane structure and operation of institutions, including the bridge structure, calculation and checking the layout, the main beam structure calculation and checking , end beams calculation and checking, the main end beam connect and run the cart and checking body parts of choice.Keywords: Crane;The moving mainframe;Bridge;Main beam and end beam;Small tonnage目录1 绪论 (1)1.1 桥式起重机的介绍 (1)1.2 桥式起重机设计的总体方案 (3)1.2.1主梁和桥架的设计 (4)1.2.2端梁的设计 (4)2 大车运行机构的设计 (4)2.1 设计的基本原则和要求 (4)2.1.1机构传动方案 (4)2.1.2大车运行机构具体布置的主要问题 (5)2.2 大车运行机构的计算 (5)2.2.1确定机构传动方案 (5)2.2.2大车车轮与轨道的选择及其强度校核 (6)2.2.3运行阻力运算 (8)2.2.4选择电动机 (8)2.2.5验算电动机的发热条件 (9)2.2.6减速器的选择 (9)2.2.7验算运行速度和实际所需功率 (9)2.2.8验算起动时间 (10)2.2.9起动工况下校核减速器功率 (11)2.2.10验算启动不打滑条件 (11)2.2.11选择制动器 (13)2.2.12选择联轴器 (13)2.2.13浮动轴的验算 (14)2.2.14缓冲器的选择 (16)3 桥架结构的计算 (17)3.1 主要尺寸的确定 (17)3.1.1大车轮距 (17)3.1.2主梁高度 (17)3.1.3端梁高度 (17)3.1.4桥架端部梯形高度 (17)3.1.5主梁腹板高度 (17)3.1.6确定主梁截面尺寸 (17)3.1.7加劲板的布置尺寸 (18)3.2 主梁的计算 (19)3.2.1计算载荷确定 (19)3.2.2主梁垂直最大弯矩 (19)3.2.3主梁水平最大弯矩 (19)3.2.4主梁的强度验算 (20)3.2.5主梁的垂直刚度验算 (22)3.2.6主梁的水平刚度验算 (22)3.3 端梁的计算 (23)3.3.1计算载荷的确定 (23)3.3.2端梁垂直最大弯矩 (23)3.3.3梁的水平弯矩 (23)3.3.4端梁截面尺寸的确定 (24)3.3.5端梁的强度验算 (24)3.4 主要焊缝的计算 (24)3.4.1端梁端部上翼缘焊缝 (24)3.4.2端梁端部下翼缘焊缝 (27)3.4.3主梁与端梁的连接焊缝 (27)3.4.4主梁上盖板焊缝 (27)4 基于软件PRO/ENGINEER的三维造型结构设计 (28)4.1 三维软件PROE的简介 (28)4.2 三维制图的简要过程 (28)4.2.1大车结构的三维设计 (28)4.2.2小车结构的三维设计 (30)4.2.3整车装配 (31)结束语 (33)参考文献 (34)致谢 (35)1 绪论1.1 桥式起重机的介绍中国古代灌溉农田用的桔是臂架型起重机的雏形。
桥式起重机毕业论文

桥式起重机毕业论文目录前言 (1)1 单梁桥式起重机的概述 (2)1.1单梁桥式起重机的整体描述 (2)1.1.2 单梁桥式起重机机构的特点 (3)1.1.3 单梁桥式起重机的基本参数 (3)1.1.4 桁架梁和箱形梁的比较 (3)1.2 LD型电动单梁桥式起重机各部件的作用(位结构) (3)1.2.1 主梁 (4)1.2.2 端梁 (4)1.2.3主梁和端梁的联接 (4)1.2.4 电动葫芦 (4)1.2.5 大车 (5)1.2.6 小车架 (5)1.2.7 小车 (5)1.2.8操纵室 (5)1.3 运行机构 (6)1.3.1 小车运行机构 (6)1.3.2 大车运行机构 (7)1.4 发展趋势 (8)1.4.1 国内桥式起重机发展有三大特征 (8)1.4.2 国外桥式起重机发展四大特征 (9)1.4.3 机械化运输系统的组合应用 (10)2 工作条件及设计要求 (11)2.1 型式及设计的构造特点 (11)2.2 选择电动葫芦的规格型号 (12)2.3 主梁设计计算 (13)2.3.1 主梁断面几何特性 (13)2.3.3刚度计算 (20)2.3.4 稳定性计算 (23)2.4 端梁设计计算 (23)2.4.2 端梁中央断面几何特性 (24)2.5 起重机最大轮压 (26)2.5.1起重机支座及作用 (26)2.5.2 起重机最大轮压的计算 (26)2.6 最大歪斜侧向力 (33)2.7 端梁中央断面合成应力 (34)2.8 车轮轴对端梁腹板的挤压应力 (34)2.9 主、端梁连接计算 (35)2.9.1 主、端梁连接形成及受力分析 (35)2.9.2 螺栓拉力的计算 (36)3 小车起升和运行机构的设计计算 (40)3.1 电动葫芦起升机构设计计算 (41)3.1.1 电动葫芦的基本设计参数 (41)3.1.2 电动葫芦起升机构简要设计步骤 (42)3.2 电动葫芦运行机构设计计算 (49)3.2.1.电动小车运行静阻力计算 (49)3.2.2.电动机的初选预验算 (50)3.2.3 传动比 (51)3.2.4 制动器的选择与计算 (52)4 大车运行机构设计计算 (55)4.1 确定机构传动方案 (55)4.2 选择车轮和轨道,验算车轮强度 (55)4.3 验算车轮的疲劳强度 (55)4.4 传动装置设计计算 (57)4.4.1 选择电动机 (57)4.4.2 大车运行机构的功率计算 (58)4.4.3 验算电动机 (58)4.5设计减速装置 (60)4.5.1选择减速器的类型 (60)4.5.2确定减速器的型号 (61)4.6 起重机有关使用机构的安全装置 (62)4.6.1 缓冲器 (62)4.6.2 起升高度限位器 (63)4.6.3 行程限位器 (63)4.6.4 安全开关 (63)4.7 起重机的组装及试车要求 (63)4.7.1起重机的安装注意事项 (63)4.7.2 起重机的试车要求 (65)5 焊缝连接分析 (67)5.1 连接方法 (67)5.1.1焊接 (67)5.1.2 对接焊缝 (67)5.1.3 角焊缝 (68)致谢.............................................................................. 错误!未定义书签。
8010t桥式起重机毕业论文
`1概述1.1起重机械的用途及工作特点起重机械主要用于装卸和搬运物料,是现代化生产的重要设备。
它不仅广泛应用于工厂、矿山、港口、车站、建筑工地、电站等生产领域,而且也应用到人们的生活领域。
使用起重运输机械,能减轻工人劳动强度,降低装卸费用,减少货物的破损,提高劳动生产率,实现生产过程机械化和自动化不可缺少的机械设备。
起重机械是以间歇、重复工作方式,通过起重吊钩或其它吊具的起升、下降,或升降与运移重物的机械设备。
其工作特点具有周期性。
在每一工作循环中,它的主要机构作一次正向及反向运动,每次循环包括物品的装载及卸载,搬运物品的工作行程和卸载后的空钩回程,前后两次装载之间还有包括辅助准备时间在内的短暂停歇。
综合起重机械的工作特点,从安全技术角度分析,可概括如下:⑴起重机械通常具有庞大的结构和比较复杂的机构,能完成一个起升运动、一个或几个水平运动。
例如,桥式起重机能完成起升、大车运行和小车运行三个运动;门座起重机能完成起升、变幅、回转和大车运行四个运动。
作业过程中,常常是几个不同方向的运动同时操作,技术难度较大。
⑵所吊运的重物多种多样,载荷是变化的。
有的重物重达几百吨乃至上千吨,有的物体长达几十米,形状很不规则,还有散粒、热融状态、易燃易爆危险物品等,使吊运过程复杂而危险。
⑶大多数起重机械,需要在较大的范围内运行,有的要装设轨道和车轮(如塔吊、桥吊等),有的要装设轮胎或履带在地面上行走(如汽车吊、履带吊等),还有的需要在钢丝绳上行走(如客运、货运架空索道),活动空间较大,一旦造成事故影响的面积也较大。
⑷有些起重机械,需要直接载运人员在导轨、平台或钢丝绳上做升降运动(如电梯、升降平台等),其可靠性直接影响人身安全。
⑸暴露的、活动的零部件较多,且常与吊运作业人员直接接触(如吊钩、钢丝绳等),潜在许多偶发的危险因素。
⑹作业环境复杂。
从大型钢铁联合企业,到现代化港口、建筑工地、铁路枢纽、旅游胜地,都有起重机械在运行;职业场所常常会遇有高温、高压、易燃易爆、输电线路、强磁等危险因素,对设备和作业人员形成威胁。
基于PLC控制桥式起重机变频系统的设计毕业设计论文

基于PLC控制桥式起重机变频系统的设计摘要:桥式起重机作为物料搬运系统中一种典型设备,在企业生产活动中应用广泛作用显著,因此对于提高桥式起重机的运行效率,确保运行的安全可靠性,降低物料搬运成本是十分重要。
传统的桥式起重控制系统主要采用继电器接触器进行控制,采用交流绕线串电阻的方法进行启动和调速,这种控制系统存在可靠性差,操作复杂,故障率高。
电能浪费大,效率低等缺点。
针对桥式起重机控制系统中存在的上述问题,把可编程序控制器和变频器应用于桥式起重机控制系统上,并进行了较详细的设计。
1.根据桥式起重机的运行特点,桥式起重机控制系统采用PLC控制系统、变频调速系统等组成。
2.PLC系统采用三菱公司产品,能控制起重机大车、小车的运行方向和速度;吊钩的升、降方向及速度,同时能检测各个电机故障现象,减小了传统继电—接触式控制系统的中间环节。
减少了硬件和控制线,极大提高了系统的稳定性,可靠性。
3. 实验表明,采用PLC该控制系统,使桥式起重机工作可靠,使用方便,同时具有动态显示的功能,节能效果好明显。
关键词:可编程序控制器;变频调速;桥式起重机;电气控制系统Frequency of Bridge Crane Based onPLC Control System DesignAbstract:The bridge crane carries a kind of typical equipment in the supplies system,so it have extensive function in the activity of Producing enterprise,so it important improve the bridge crane operational efficiency,guarantee the safe reliability to be operated,reduce the cost of the supplies carrying. But the traditional bridge crane control system mainly adopts relay and contactor to control bridge crane,adopt the methods of Wire winding bunch of resistance to start and adjust speed of motor,the control system have many disadvantages,for example: dependability is bad,it is complicated to operate,fault rate is high .the electric energy is wasted greatly,efficiency is low.To the question that exist in the bridge crane control system,the Paper apply Programmable Controller and frequency converter on control system of bridge crane,have candied on deeper research . Irrelevant respects.1. According to the operation characteristic of bridge crane,bridge crane control system adopt PLC control system and frequency conversion system.2. PLC system adopts the Mitsubishi Company Products,can control the crane cart,ear operation direction and change speed ;To rise,lower liver direction and change speed,can measure each motor trouble Phenomenon,have reduced traditional electricity-Contact-type control system of intermediate link . it reduce the hardware and control line,has improved systematic stability ,dependability greatly .3. The experimental result indicates ,adopt PLC control system ,it is reliable to make the bridge crane work,easy to use,have dynamical shown function,energy-conservation is effectual.Key words: PLC; frequency conversion; bridge crane; electrical control system目录1 绪论 (1)1.1桥式起重机的概述 (1)1.2 桥式起重机的发展趋势 (2)1.3 课题研究的目的和意义及基本参数 (3)2 变频调速控制技术的基本原理 (5)2.1变频调速原理简介 (5)2.2 变频器简介 (8)2.2.1变频器的主电路 (8)2.2.2变频器的控制电路 (9)2.2.3现在变频调速的控制方法 (10)2.3 凸轮控制器简介 (11)2.3.1 凸轮控制器的结构 (11)2.3.2凸轮控制器控制电路 (12)2.4 主令控制器简介 (14)3 桥式起重机系统总体方案设计和部件选用 (15)3.1 系统总体方案设计 (15)3.2电机的选用 (15)3.2.1变频调速对电机的要求 (16)3.2.2变频起重机系统中电机的选型 (16)3.2.3电机冷却 (16)3.2.4计算及电机的选取 (17)3.3 变频器的选用 (20)3.3.1变频器选型 (20)3.3.2变频器选择及电流验证 (20)3.4 常用辅助件的选择 (22)4 PLC在桥式起重机变频控制系统的应用 (25)4.1本系统中可编程控制器的选择及其特点 (25)4.1.1 PLC概述 (25)4.1.2 PLC 系统选择型——三菱FX2N—48ER (25)4.1.3三菱FX2N系列PLC特点及主要硬件介绍 (25)4.2变频调速起重机控制系统设计 (27)4.2.1系统控制的功能和要求 (27)4.2.2控制系统的I/O点及地址分配 (27)5桥式起重机变频控制系统软件设计 (29)5.1系统的控制程序设计 (29)5.1.1主钩和副钩起升机构的控制程序及梯形图 (29)5.1.2大车和小车运行机构的控制程序及梯形图 (32)5.1.3系统抗干扰措施 (34)5.2 PLC与变频器的通信接线图 (35)附录 (36)总结 (37)致谢 (38)参考文献 (39)1 绪论1.1桥式起重机的概述起重机是一种用来起重与空中搬运重物的起重运输机械,广泛应用于工矿企业、车站、港口、仓库、建筑工地等部门。
双梁桥式起重机设计本科毕业设计论文

内容摘要桥式起重机是桥架在高架轨道上运行的一种桥架型起重机,又称天车。
桥式起重机的桥架沿铺设在两侧高架上的轨道纵向运行,起重小车沿铺设在桥架上的轨道横向运行,构成一矩形的工作范围,就可以充分利用桥架下面的空间吊运物料,不受地面设备的阻碍。
桥式起重机的运行机构主要由减速器、主动轮组、从动轮组、传动轴、和一些连接件组成。
运行机构的设计包括其大车小车运行机构设计的基本原则和要求;机构的传动方案选择;选择车轮和轨道;稳态运行阻力的计算;电动机的选择减速器的选择;起动时间与启动加速度验算;制动器的选择;联轴器的选择等。
此次设计已知数据:起重量(主起升):50t,起重量(副起升):12.5t,小车运行速度:35m/min,大车运行速度:80m/min,工作级别:M5,机构接电持续率JC=25%。
关键词: 桥式起重机,大车运行机构,小车运行机构。
ABSTRACTThis thesis mainly to the bridge crane metal structure and design for hoisting mechanism.Metal structure design including the main girder, the size of the design, to determine the intensity, and stiffness checking computations, calculation of girders load determination, main calculation, after welding joint design, welding process design, etc.Lifting mechanism design including lifting scheme selection, the diameter of wire rope drum, hook choice, determined, and the calculation of the nut electric motors and reducer choice, etc.Key words:Bridge Crane,crane travel mechanism,A trolley running mechanims。
通用桥式起重机设计毕业设计论文.doc
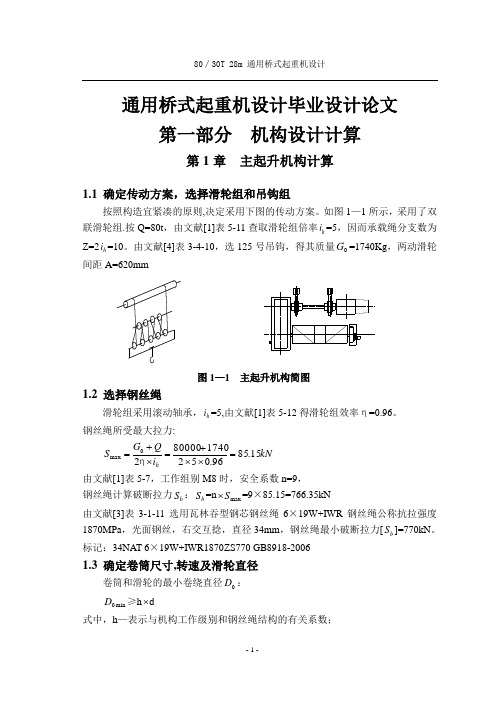
通用桥式起重机设计毕业设计论文第一部分 机构设计计算第1章 主起升机构计算1.1 确定传动方案,选择滑轮组和吊钩组按照构造宜紧凑的原则,决定采用下图的传动方案。
如图1—1所示,采用了双联滑轮组.按Q=80t ,由文献[1]表5-11查取滑轮组倍率h i =5,因而承载绳分支数为 Z=2h i =10。
由文献[4]表3-4-10,选125号吊钩,得其质量0G =1740Kg ,两动滑轮间距A=620mm图1—1 主起升机构简图1.2 选择钢丝绳滑轮组采用滚动轴承,h i =5,由文献[1]表5-12得滑轮组效率η=0.96。
钢丝绳所受最大拉力:kN i Q G S h 15.8596.05217408000020max =⨯⨯+=⨯+=η由文献[1]表5-7,工作组别M8时,安全系数n=9, 钢丝绳计算破断拉力b S :b S =n max S ⨯=9×85.15=766.35kN由文献[3]表3-1-11选用瓦林吞型钢芯钢丝绳6×19W+IWR 钢丝绳公称抗拉强度1870MPa ,光面钢丝,右交互捻,直径34mm ,钢丝绳最小破断拉力[b S ]=770kN 。
标记:34NAT 6×19W+IWR1870ZS770 GB8918-20061.3 确定卷筒尺寸,转速及滑轮直径卷筒和滑轮的最小卷绕直径0D : min 0D ≥h ⨯d式中,h —表示与机构工作级别和钢丝绳结构的有关系数;由文献[1]表5—10得:卷筒1h =25;滑轮2h =28;卷筒最小卷绕直径min j D =1h ⨯d=25⨯34=850mm ; 滑轮最小卷绕直径min h D =2h ⨯d=28⨯34=952mm 。
考虑起升机构布置卷筒总长度不宜太长,定滑轮直径取950mm,卷筒直径取D=1250㎜。
卷筒长度:15038)42128451018(2)4(23100+⨯++⨯⨯⨯⨯=+++⋅=ππL t Z D i H L h =2512mm ,取L=2500mm 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
桥式起重机控制系统设计毕业论文目录1绪论 (1)1.1传统桥式起重机控制系统存在的问题 (1)1.2桥式起重机电气传动技术的国内外发展概况 (1)1.3本课题的研究意义及主要内容 (2)2矢量控制变频调速 (4)2.1变频调速的基本原理 (4)2.2变频器的基本结构 (6)2.3变频调速的控制方式—矢量控制方式 (6)3 变频调速桥式起重机系统总体方案设计和部件选型 (8)3.1桥式起重机系统 (8)3.1.1各机构组成和特点 (8)3.1.2传统桥式起重机机的电气控制系统 (8)3.2本系统总体方案设计 (9)3.3系统的部件设计 (10)3.3.1电机的选用 (10)3.3.2变频器的选用 (12)3.3.3常用辅件的选择 (16)4可编程序控制器在桥式起重机变频控制系统中的应用 (19)4.1 PLC的系统组成与各部分的作用 (19)4.2可编程序控制器 (19)4.3变频调速起重机控制系统设计 (20)4.3.1系统控制的要求 (20)4.3.2控制系统的I/O点及地址分配 (20)4.3.3 PLC配置 (22)4.3.4.电气控制系统原理图 (23)4.3.5各机构的安全保护及检测 (25)5桥式起重机变频调速系统软件设计 (27)5.1 S7一200PLC网络的通信协议及本系统采用的通信协议 (27)5.1.1 S7-200PLC网络的通信协议 (27)5.1.2本系统采用的通信协议 (27)5.1.3上位机和PLC之间的通信 (27)5.2 PLC程序设计 (29)5.2.1 PLC编程软件概述 (29)5.2.2 程序设计 (30)5.3系统抗干扰措施 (37)6全文总结及其展望 (38)6.1全文总结 (38)6.2研究展望 (39)参考文献 (40)致谢 (41)1绪论1.1传统桥式起重机控制系统存在的问题桥式起重机作为物料搬运机械在整个国民经济中有着十分重要的地位。
但在实际使用中,结构开裂仍时有发生。
究其原因是频繁的超负荷作业及过大的机械振动冲击所引起的机械疲劳。
因此,除了机械上改进设计外,改善交流电气传动,减少起制动冲击,也是一个很重要的方面。
由于传统桥式起重机的电控系统采用转子回路串接电阻进行有级调速,致使机械冲击频繁,振动剧烈,因此电气控制上应采用平滑的无级调速是解决问题的有效手段。
1.2桥式起重机电气传动技术的国内外发展概况电气调速控制的方法很多,对直流驱动来讲60年代采用发电机一电机系统,从控制电阻分级控制,到交磁放大控制,到可控硅SRC激磁控制,到主回路可控硅即晶闸管整流供电系统。
随着电子技术的飞速发展,集成模块出现,计算机、微处理器应用,因此控制从分立组成模拟量控制发展至今天的数字量控制。
从交流驱动来讲:常规的常采用绕线式电动机转子串电阻调速,为满足重物下放时的低速,一般依靠能耗制动、反接制动,后来还采用涡流制动,还有靠转子反馈控制制动、反接制动、单相制动器抱闸松劲的所谓软制动,随着电子技术的发展,国内外开发研制变频调速,PLC可编程序控制器的应用控制系统的性能更加完美。
目前国内外几种常用调速系统配置:1.DC一300直流驱动调速系统:GE公司DC一300、DC一2000是微处理器数字量控制的直流驱动调速系统,其控制功率从300HP到4000HP,并采用PLC对整机驱动系统实施故障诊断、检测、报警及控制。
2.交流调速控制系统:对于起重机械来讲,交流驱动仍是国内普遍采用的方案而且多数停留在绕线式电机转子串电阻来调速。
随着功率电子技术的发展,目前,该技术己进入了成熟稳定的发展应用阶段。
日本安川电机制作所于1972年就正式定为VS系列,应用于起重机及轧机辅助设备的交流调速。
法国、英国、德国等大电气公司亦在这方面展开了重点研制开发。
借助电力电子技术、微电子技术的发展,由分离元件发展到大规模集成电路,从而实现控制部件的微型组件化、智能化、标准化、系列化,进而从模拟量控制发展到数字量控制。
可编程序控制器PLC引入到交流电气传动系统后,使传动系统性能发生了质的变化。
在桥式起重机实现了抓斗的自动控制和故障诊断、检测显示等,达到了新的技术高度。
3.变频调速:变频调速技术是国际上各大电气公司在70年代末80年代投入全力研制、开发,也是国际国内这几年全力研制应用的目标与方向。
这几年一些公司如德国SIEMENS,美国GE,日本三菱等推出全数字化的矢量控制技术,大功率的IGBT模块的出现使变频技术在起升机械、电梯等位能负载控制成为现实。
同时随着PLC系统的不断成熟与完善,以及大容量变频器在位能负载上的成功应用,变频调速系统必将成为未来调速市场的主流。
1.3本课题的研究意义及主要内容本课题中以桥式起重机作为研究实体,由上可知,传统桥式起重机的控制系统主要采用交流绕线转子串电阻的方法进行启动和调速,继电一接触器控制,这种控制系统的主要缺点有:1.桥式起重机工作环境差,工作任务重,电动机以及所串电阻烧损和断裂故障时有发生。
2.继电一接触器控制系统可靠性差,操作复杂,故障率高。
3.转子串电阻调速,机械特性软,负载变化时转速也变化,调速不理想。
所串电阻长期发热,电能浪费大,效率低。
要从根本上解决这些问题,只有彻底改变传统的控制方式。
变频技术的运用使得起重机的整体特性得到较大提高,可以解决传统桥式起重机控制系统存在诸多的问题,变频调速以其可靠性好,高品质的调速性能、节能效益显著的特性在起重运输机械行业中具有广泛的发展前景。
本论文以20/5t*19.5m通用桥式起重机为研究对象,研究了变频调速技术在起重机中的应用,并且根据原有的控制结构,结合组态软件和PLC技术,提出了一个改进的系统控制结构,并且采用此体系结构实现了桥式起重机变频调速系统。
本论文的主要内容分为如下五个部分:(1)矢量控制变频调速原理即本论文的第二章,它首先介绍变频调速的基本原理,然后介绍了变频器的基本结构,即变频器的主电路和控制电路构成,最后介绍了变频器的基本控制方式一矢量控制方式。
为下一步部分的起重机变频控制系统提供了理论基础。
(2)变频调速桥式起重机系统总体方案设计和部件选型即本论文的第三章,起重机变频调速控制系统主要由上位机(工业触摸屏系统)、下位机(PLC控制系统),变频器等组成,并选择系统各主要组成部分。
(3)可编程序控制器在桥式起重机变频控制系统中的应用即本论文的第四章,它首先介绍了PLC原理、系统组成及其各部分的作用,然后论述本系统中PLC的选取,采用Siemens公司S7-200型PLC,最后介绍控制系统的构成及各机构的安全保护和检测。
(4)桥式起重机变频调速系统软件设计即本论文的第五章,主要分为触摸屏的软件设计和系统的PLC程序设计。
它首先介绍了组态软件,然后讲述组态软件对触摸屏的编程,同时根据控制系统的要求对PLC进行编程。
2矢量控制变频调速2.1变频调速的基本原理根据异步电机的知识,异步电机的转速公式为:N=60f/p*(1-s) (2-1)其中:n—异步电动机的转速,单位为r/min;f一定子的电源频率,单位为Hz:S一电机的转速滑差率;P一电机的极对数。
由上式(2-1)可知,如果改变输入电机的电源频率f,则可相应改变电机的输出转速。
在电动机调速时,一个重要的因素时希望保持每极磁通量中.为额定值不变。
磁通太弱,没有充分利用电机的磁心,是一种浪费:若要增大磁通,又会使磁通饱和,从而导致过大的励磁电流,严重时会因为绕组过热而损坏电机。
对于直流电机来说,励磁系统是独立的,所以只要对电枢反应的补偿合适,保持中,不变是很容易做到的。
在交流异步电机中,磁通是定子和转子合成产生的。
三相异步电动机每相电动势的有效值是:Eg=4.44f1N1kN1ɸM(2-2)式中:Eg-------气隙磁通在定子每相中感应电动势有效值,单位为v;f1--------定子频率,单位为Hz;N1-------定子每线绕组串联匝数;KN1-------基波绕组系数;ɸM----每极气隙磁通量,单位为Wb;由公式可知,只要控制好Eg和f1,便可以控制磁通ɸM不变,需要考虑基频(额定频率)以下和基频以上两种情况:1 基频以下调速:即采用恒定的电动势.有上式可知,要保持不ɸM变,单频率f1从额定值f1n向下调节时,必须同时降低Eg,然而绕组中的感应电动势是难以控制的,但电动势较高时,可以忽略电子绕组的漏磁阻抗压降,而认为定子相电压U1≈E,则得U1/f=常值。
低频时,U1和Eg值较小,定子阻抗压降所占的份量都比较显著,不能在忽略。
这时,可以人为的把电压U抬高一些,以便近似的不补偿定子压降。
带定子压降补偿的恒功率比控制特性为b线,无补偿的为a线,如图2-1所示。
U1(0 f1n f1(频率)图2-1 恒压频比控制特性2 基频以上调速在基频以上调速时,频率f往上增高,但电压u磁通与频率成反比的降低,相当与直流电机弱磁升速的情况。
把基频以下和基频以上两种情况合起来,可得到异步电动机的变频调速控制特性,如图2-2。
如果电动机在不同的转速下都具有额定电流,则电动机都能在温升容许的条件下长期运行,这时转矩基本上随磁通变化。
在基频以下,属于“恒转矩调速”的调速,而在基频以上,基本上属于“恒功率调速”。
异步电动机变频调速特性如下图2-2所示:0 f1n f1图2-2 异步电动机变频调速特性2.2变频器的基本结构图 2—3 变频器的结构图变频器的基本结构见如图2-3所示,电机在带动较大负载在启动时,会有较大的冲击电流,采用变频器时,可以实现软启动,减小冲击电流,解决大负载的启动问题。
变频器保护功能很强,在运行过程中能随时检测到各种故障,并显示故障类别(如电网瞬时电压降低,电网缺相,直流过电压,功率模块过热,电机短路等),并立即封锁输出电压。
这种“自我保护”的功能,不仅保护了变频器,还保护了电机不易损坏。
2.3变频调速的控制方式—矢量控制方式矢量控制交流调速是通过坐标变换使交流电动机获得与直流电动机相似的数学模型,从而可采用类似于直流电动机的控制方法来控制瞬时转矩,使交流调速系统获得与直流调速系统同样优越甚至更加优越的动静态特性能。
其基本思想是将异步电动机的物理模型等效变换成类似直流电动机的模型,再仿照直流电动机去控制它,等效的原则是在不同坐标中产生的磁动势相同。
在实际的等效变换中,先将异步电动机在三相静止坐标系下的定子电流i A,i B,i C 通过三相/两相变换,等效变换,等效为两相静止坐标系下的交流电流iα、iβ再通过磁场定向的旋转变换,等效为同步旋转坐标系下的直流电流i M、i T。
等效的电动机绕组模型如图2-4所示。
(a)三相交流绕组(b)两相交流绕组(c)旋转的直流绕组图2-4 等效的交流电机绕组直流电机绕组等效模型通过控制iM 、iT大小也就是电流矢量i的幅值和去向去等效的控制三相电流i A,、iB,i C瞬时值,从而调节电动机的磁场与转矩达到调速的目的。