船舶的稳性
提高船舶稳性的措施
提高船舶稳性的措施1. 引言船舶稳性是指船舶在各种外力的作用下,保持稳定的能力。
良好的船舶稳性是保障船舶安全航行的关键因素之一。
本文将介绍一些提高船舶稳性的措施,包括改良船体设计、安装稳定设备和改进船舶操作等方面。
2. 改良船体设计船体设计是船舶稳性的基础,通过改良船体设计可以提供更好的船舶稳定性。
以下是几种改良船体设计的措施:•增加船舶宽度:增加船舶的宽度可以提高船舶的稳定性。
较宽的船舶更能抵抗侧倾和纵倾的力量,从而提高船舶的稳定性。
•增加船舶的重心:将船舶的重心下移,可以使船舶更加稳定。
通过增加船舶的水平结构和重物,可以使船舶重心下移,从而增加稳定性。
•改善船体外形:通过改变船舶的外形,减小空气阻力和水阻力,可以提高船舶的稳定性。
例如,减小船体的曲率半径和船尾的面积等。
3. 安装稳定设备为了进一步提高船舶的稳定性,可以在船舶上安装一些稳定设备。
以下是一些常见的稳定设备:•气压舱:气压舱是一种通过调整舱内气压来达到稳定船舶的设备。
通过增加舱内的气压,可以增加船舶的浮力,从而提高船舶的稳定性。
•球ast底船体:球ast底船体是一种通过在船体下方安装球形物体来提高船舶稳定性的设备。
球ast底船体可以增加船舶的阻力,减小侧倾和纵倾的力量。
•自动控制系统:通过使用自动控制系统,可以实时监测船舶的倾斜情况,并及时采取措施来恢复船舶的稳定性。
自动控制系统通常包括倾斜传感器、控制阀和液压系统等。
4. 改进船舶操作除了改良船体设计和安装稳定设备外,改进船舶操作也是提高船舶稳性的重要措施。
以下是一些改进船舶操作的建议:•合理装载货物:在装载货物时,应根据船舶的稳定性曲线和稳性指标,合理分配货物的位置和重量,以保持船舶的平衡。
•合理调整舵角:舵角的调整对船舶的稳定性有很大影响。
在航行中,应根据船舶的倾斜情况和风浪状况合理调整舵角,使船舶始终保持平稳。
•培训船员:船员的技能和操作水平直接影响船舶的稳定性。
通过加强船员的培训和训练,提高其操作技巧和应对紧急情况的能力,可以提高船舶的整体稳定性。
第三章 船舶稳性

第三章
船舶稳性
第三节 载荷变动对稳性的影响及计算 船上载荷变动包括载荷移动、重量增减和货物悬挂,它们对船舶稳性 的影响是不同的。 一、载荷移动 移动原因:航行中的摇晃、配载时的调整船舶稳性等。
1.船内重物水平移动
平衡了移动原理:移动力则需附加力偶,且力偶大小=力*移动距离 注意:只改变浮态(倾角),不改变初稳性高度 由于浮力和重力不再作用于同一垂线上而形成力偶,该力偶矩将迫使船 舶向重物移动方向的一侧横倾。
船舶稳性
5.液舱自由液面惯性矩表及初稳性高度修正说明 6.进水点位臵及进水角曲线 7.许用重心高度曲线图或最小许用初稳性高度曲线图 二、船舶稳性资料的应用 1、了解和掌握船舶稳性的整体状况; 2、核算船舶实际装载状态下的稳性; 3、核算船舶的摇摆性。
第三章
船舶稳性
谢谢!
船舶自正浮起横摇至一舷的倾角称为一个摆幅,4个摆幅称为一个全摆程。
第三章
船舶稳性
三、船舶稳性调整 稳性调整的方法可概括为:船内载荷的垂向移动及载荷横向对称增减调 整船舶初稳性高度。 1.载荷垂移法调整GM 载荷垂向移动调整船舶稳性的手段适应于配载计划编制阶段。
由于载荷垂移前、后船舶排水量不变,故初稳心距基线高度KM不变,因 此,载荷垂移所引起的船舶重心高度改变量在数值上就等于初稳性高度该变 量。船舶在配载计划编制时,经校核后若稳性过大,可将载荷上移;反之将 载荷下移。
第三章
船舶稳性
一、船舶初稳性的基本标志 船舶在小倾角条件下,静稳性力矩MS可表示为
MS GZ GM Sin
(9.81kN.m)
第三章
船舶稳性
式中: GM表示船舶重心G 与稳心M间的垂直距离,称为初稳性高度(Initial stability hight)GM 。 θ船舶倾角 结论:在排水量及倾角一定的情况,静稳性力矩的大小取决于重心和稳心 的相对位臵,即取决于GM的大小。当M点在G点之上,GM为正值,此时船 舶具有稳性力矩并与GM值成正比;当当M点在G点之下,GM为负值,此时 船舶具有倾覆力矩并与GM值成正比;当M点和G点重合,GM为零,此时稳 性力矩为零。
保证船舶适度的稳性的措施
保证船舶适度的稳性的措施船舶稳性是指船舶在静态和动态条件下保持平衡和稳定的能力。
这是船舶设计的重要因素之一。
保证船舶适度的稳性对于船舶的安全和航行效率至关重要。
以下是保证船舶适度的稳性的措施。
1. 船舶操作船舶稳性与船舶操作密切相关。
船舶在航行时要合理控制舵,控制货物的位置和负载等,以保证船舶适度的稳性。
船员应该经过专业培训,有足够的经验和技能来操作船舶。
2. 负载计算负载的计算对于船舶的稳性至关重要。
在运输货物时,必须确保船舶的总载重不超过其设计吨位。
船舶在装载货物时,船舶的设计要求必须被考虑在内。
此外,货物应该被合理地分配在船舶上,避免船舶重心过高或过低,从而影响船舶的稳性。
3. 转向惯性转向惯性是指船舶在转向过程中的惯性力。
转向惯性会对船舶的稳性产生影响。
解决这个问题的方法是通过良好的船舶设计和建造,使船舶具有适当的弯曲和剪切,以平衡转向惯性的力量。
4. 稳性试验船舶稳性试验是为了确定船舶的稳性特征。
这个试验可以帮助设计师和船舶经营者确保船舶适度的稳性。
稳性试验包括静态稳性试验和动态稳性试验。
其中静态稳性试验是在船舶处于稳定状态,不受外力干扰的情况下进行的。
动态稳性试验是为了检查船舶在波浪中的动态稳定性能。
5. 船舶维护船舶维护是保证船舶适度的稳性的关键。
船舶的船体结构,船舶设备和船舶的各个部分经常需要进行定期检查和维护。
维护可以预防故障和损坏,并在必要时进行修理或更换。
船舶的设备维护可以确保设备正常工作,以避免在运行过程中出现不良后果。
6. 泊船泊船是指停靠在码头或锚地。
在停靠时,需要考虑船舶与码头或锚的角度和距离。
船舶停靠时必须采取适当的措施以确保船舶适度的稳定。
必要时,可以使用锚或辅助锚来保持船舶的稳定。
7. 静荷库静荷库是一种可用于提高船舶稳性的设备。
静荷库可以通过吸收和分散液体负载的作用,可以控制船舶的稳定性和减少船舶的颠簸和摆动。
以上是保证船舶适度的稳性的措施。
这些措施对于确保船舶的安全和航行效率至关重要。
船舶稳性核算—船舶稳性的检验与调整

1.对船舶的完整稳性要求
共有四项指标: 第一项是对初稳性而言的; 第二项和第三项是对大倾角稳性而言的; 第四项是对动稳性而言的。
规则要求必须同时满足 例:某轮的GM为0.5米,只能说满足了初稳性的要求,是
否满足稳性的全部要求则不能确定。
2. 稳性衡准数的求取
船舶稳性衡准数,是指船舶的最小倾覆力矩Mh·min与风压倾侧 力矩MW的比值,或最小倾覆力臂Lh·min与风压倾侧力臂LW的比 值,即:
2. 稳性衡准数的求取
2)式计算:
MW = PW·AW·ZW = 9.81Δ·lW 式中: AW—船舶正浮时水线以上船体及甲板货的侧投影面积;
ZW—AW的面积中心至水线面的垂直距离; PW—单位计算风压; lW—风压倾侧力臂,即风压倾侧力矩与船舶排水量的比值。
当船舶实际装载方案的初稳性高度(经自由液面修正后) 不小于该装载状态下的最小许用初稳性高度值(即GM≥GMC) 时,表示船舶的稳性已满足规则规定衡准指标。
我国法定规则对普通商 船完整稳性的要求
目录
01
稳性要求
02 稳性衡准数的求取
03
临界稳性高度
1.对船舶的完整稳性要求
对于航行于远海、近海、沿海航区的非国际航行船舶, 我 国 的要求如下:
经自由液面修正后的完整稳性的各项指标,必须同时满足: 1)初稳性高度GM应不小于0.15m; 2)横倾角在30o处的复原力臂值GZ应不小于0.20 m,如 果 船体进水角小于30o,则进水角处的复原力臂值应不小于 0.20 m; 3)最大复原力臂对应的横倾角应不小于25o,且进水角应 不小于最大复原力臂对应的横倾角θs·max; 4)稳性衡准数应不小于1。
K= Mh·min/MW = Lh·min/ LW K≥1,即Mh·min≥MW,K是衡量船舶动稳性的重要参数。
第四章 船舶稳性
第四章船舶稳性第一节船舶稳性的基本概念(一)船舶平衡的3种状态1、稳定平衡>0G点在M点之下,GM>0,MR2、随遇平衡G点与M点重合,GM=0,M=0R3、不稳定平衡<0G点在M点之上,GM<0,MR(二)稳性的定义船舶稳性是指船舶受给定的外力作用后发生倾侧而不致倾覆,当外力消失后仍能回复到原来的平衡位置的能力。
(三)稳性分类分类方法: 按倾斜方向、倾角大小、倾斜力矩性质、船舱是否进水┏破舱稳性稳性┫┏初稳性(小倾角稳性)┃┏横稳性┫┏静稳性┗完整稳性┫┗大倾角稳性┫┗纵稳性┗动稳性其中,倾角小于等于10-15度称为小倾角,否则称为大倾角。
倾斜力矩性质指静力或动力,或者说有无角速度、角加速度。
第二节船舶初稳性(1)(一)船舶初稳性的基本标志1.稳心M 与稳心距基线高度KM船舶小倾角横倾前、后其浮力作用线交点称为横稳心,简称稳心。
稳心M距基线的垂向坐标称为稳心距基线高度。
2.初稳性的衡准指标稳心M至重心G的垂距称为初稳性高度GM。
初稳性高度GM是衡准船舶是否具有初稳性的指标。
初稳性高度大于零,即船舶重心在稳心之下,船舶就有初稳性。
3.初稳性中的假设(对于任一给定的吃水或排水量)(1)小倾角横倾(微倾);(2)在微倾过程中稳心M和重心G的位置固定不变;(3)在微倾过程中浮心B的移动轨迹是一段以稳心为圆心的圆弧;(4)在微倾过程中倾斜轴过漂心。
(二)初稳性高度GM的表达式GM=KB+BM-KG=KM-KG第二节 船舶初稳性(2)(三) 初稳性高度的求取1、 KM 可在静水力曲线图、静水力参数表或载重表中查取。
2、 KG 的计算式中,P i —— 组成船舶总重量(含空船重量等)的第i 项载荷,tZ i —— 载荷P i 的重心距基线高度,m3、Z i 确定(1)舱容曲线图表查取法船舶资料中通常有各个货舱和液舱的舱容曲线图或数据表,利用舱容曲线图表,可方便确定舱内散货或液货的重心高度Z i ,方法如下:i )对于匀质散货或液货,已知货堆表面距基线高度,在图中左纵轴上对应点做水平线交舱容中心距基线高度曲线得B 点,过B 点做垂线交上横轴得C 点,对应值即为该舱货物重心距基线高度Z i 。
船舶稳性计算公式

船舶稳性计算公式船舶稳性是指船舶在水中运行时,保持平衡和稳定的能力。
稳定性是船舶设计中非常重要的一个方面,它关系到船舶的安全性和航行性能。
船舶稳性计算公式是用来评估船舶在不同条件下的稳性情况的数学公式,通过这些公式可以计算出船舶在不同条件下的稳性参数,从而为船舶设计和运行提供参考依据。
船舶稳性计算公式的基本原理是基于阿基米德原理和力学平衡原理,通过计算船舶的浮力、重力和倾覆力矩等参数来评估船舶的稳定性。
在船舶设计和运行中,稳性计算公式被广泛应用于评估船舶的稳性情况,为船舶设计师和船舶操作人员提供了重要的参考数据。
船舶稳性计算公式涉及到许多参数,其中包括船舶的尺寸、形状、重心位置、载重情况、浸水线、气压和海况等因素。
根据这些参数,可以得出船舶的稳性曲线、倾覆角、倾覆力矩、倾覆力臂等稳性参数,从而评估船舶在不同条件下的稳定性。
船舶稳性计算公式的具体形式和计算方法根据不同的稳性理论和方法而有所不同。
在船舶设计中,常用的稳性计算方法包括静态稳性计算、动态稳性计算、气动稳性计算和波浪稳性计算等。
每种方法都有相应的计算公式和计算程序,可以用来评估船舶在不同条件下的稳性情况。
静态稳性计算是指在平静水面上,船舶在静止状态下的稳性情况。
常用的静态稳性计算公式包括浮力计算公式、重心位置计算公式、倾覆力矩计算公式等。
通过这些公式可以计算出船舶在不同载重情况下的浮力和重心位置,从而评估船舶的稳定性。
动态稳性计算是指在船舶运行时,船舶在动态条件下的稳性情况。
常用的动态稳性计算公式包括倾覆角计算公式、倾覆力矩计算公式、倾覆力臂计算公式等。
通过这些公式可以评估船舶在不同航行状态下的稳定性,为船舶操作人员提供重要的参考数据。
气动稳性计算是指在强风条件下,船舶在风力作用下的稳性情况。
常用的气动稳性计算公式包括风压力计算公式、风倾覆力矩计算公式等。
通过这些公式可以评估船舶在强风条件下的稳定性,为船舶设计师和船舶操作人员提供重要的参考数据。
《船舶结构与货运》教学课件—08船舶稳性

第八章 船舶稳性(STABILITY)
稳性的定义和分类 船舶初稳性 船舶大倾角稳性 船舶动稳性 稳性规范 稳性检验调整
一、稳性的定义和分类
(一)稳性的定义
船舶受外力作用发生倾斜而 不致倾覆,外力消失后能够自动 回到原来平衡位置的能力。
(二) 稳性分类
稳性
横稳性 纵稳性
完整稳性 破舱稳性
能使船舶倾覆的最小外力矩
3.2结论
船舶在动力作用下不致倾覆的条件: Mh≤Mh.min
船舶在静力作用下不致倾覆的条件: Mh≤MR.max
(四)动稳性曲线图 (Curve of dynamical stability)
1、定义 动稳性力矩曲线:Md ~θ 的关系曲线图 动稳性力臂曲线:ld ~θ 的关系曲线图
GZ MR
Mh
O
θS
θd
θdmax
θ
(一)船舶动平衡
1、动平衡条件
Wh WR
E
Mh
0
θS
θd
(二 )船舶动稳性的衡量指标
动稳性力矩Md (船舶复原力矩MR所作的功WR)
动稳性力臂ld(GZ曲线下的面积)
(三)最小倾覆力矩Mh.min 3.1 定义
船舶在动平衡条件下能够承受的横倾力 矩的极限值
➢ 自由液面形状为矩形、三角形
矩形:k=1/12
直角三角形:k=1/36 等腰三角形:k=1/48
ix kb3
b b
b l
F
l
l
b
b
A
➢ 自由液面形状为梯形
直角梯形:k=1/36 等腰梯形:k=1/48
i x k( b1 b2 )( b12 b22 )
b1
b1
保证船舶稳性的措施
保证船舶稳性的措施船舶稳性是指船舶在航行、靠泊和装卸货物等情况下不发生危险倾覆的能力。
良好的船舶稳性措施能够确保船舶运输更加安全可靠。
下面我们将介绍一些保证船舶稳性的措施。
1. 货物摆放与配载船舶的货物摆放和配载是影响船舶稳性的重要因素。
为了保证船舶良好的稳定性,货物应该按照规定的配载图纸和指示进行合理摆放和配载。
在船舶装运过程中,货物的压载线高度和货物集中度也是必须要考虑的因素。
此外,也要根据海况进行调节。
2. 船舶水线的控制船舶的水线必须在控制范围之内,才能够保证船舶的稳定性。
通常而言,根据船舶的状况和要求,水线的控制有以下几个措施:•加载计算,确定船舶的准载吃水和准载排水量•每船舶厂家确定的吃水测量标点•水下测量的水位标志高度采用这些措施可以有效控制船舶的水位,在规定的范围内保持船舶稳定性。
3. 液体负载均衡措施船舶在携带液体物品运输时,需采取一定的液体负载均衡措施。
刘续晨和沈海生的研究表明,优秀的液体负载均衡方法应该满足以下三个原则:•随时避免危险油位•避免液体货物操作时的不良后果•通化油轮吨位和运输能力,或装船型号宽限范围内的货物种类以上提到的几点原则可以保证船舶在液体负载均衡时能够保持稳定。
4. 打捞设备和替代动力设备配置船舶在遇到不时之需的时候,需要及时配置打捞设备和替代动力设备来帮助船舶克服风浪、船体遭受损坏等问题。
在配置时,应该按照船舶的类型、航行区域和日常工作等因素进行选择,从而确保设备的有效应用。
5. 安装冷水元素船舶船体内装冷水元素也是一种能够保证船舶稳定性的措施之一。
冷水元素质量要求高且安装需要专业技术。
在使用时,船员要按照相关的操作规定进行水位的流加,以确保其稳定性。
总之,船舶稳定性措施的科学运用始终是船员们保证船舶普遍运输安全的关键。
船舶需要在满足各种规范、技术和安全要求的条件下才能达到稳定性,从而保证人们在出海旅游和海洋运输方面的舒适和安全。
保证船舶稳性的措施通常有
保证船舶稳性的措施通常有在海上行驶,船舶稳性是非常重要的,保持良好的船舶稳性可以确保船员的安全以及货物的安全。
在设计和建造船舶时,船体的长度、宽度及深度、船体形状、荷载中心位置等因素都会影响船舶的稳性。
在航行过程中,船舶的稳性也需要得到充分的保证。
通常采取以下措施来保证船舶稳性:1. GZ曲线的绘制与评价在设计船舶时,需要绘制GZ曲线,这条曲线代表着船舶受到侧倾力矩时的抵抗能力。
GZ曲线的绘制与评价可以确保船舶侧倾的安全性,如果GZ曲线较充实,表明船舶受到一定程度侧倾时,其恢复能力较强,安全性较好。
在实际应用中,需要根据船舶载重、位置及所处环境等因素进行GZ曲线重新评价。
评价的结果可以作为船舶当前安全性的依据,同时也可以为船舶修理和改装等工作提供重要数据支持。
2. 加强货物配载管理船舶的稳性不仅与船体结构有关,同样也与货物的配载有关。
对于船舶运营公司来说,需要进行货物的配载计算和管理,以便最大限度地提高船舶的稳定性和安全性。
货物的镇重点、分布位置等因素都会影响船舶的稳定性。
因此,在配载时需要严格按照船舶的载重设计要求进行操作,并颁布相应的配载管理制度,确保所有货物分配均匀,以达到更好的船舶稳定性。
3. 提高船员技能水平在航行过程中,船员团队的技术水平和素质也对船舶稳定性有着直接的影响。
船长及船员应具备丰富的航海知识,能够根据不同海况作出相应的航行决策,以保证船舶的安全稳定地行驶。
此外,船员还应具备一定的应急处理能力,如果碰到突发情况,能够及时做出应对措施,保证船舶稳定。
维护船舶设备维修保养,确保设备工作正常,也是提高船员素质的重要环节之一。
4. 采用自动控制系统通过现代技术手段,可采用一系列自动控制系统,如船舶动态定位系统、船舶稳性控制系统等,来维护船舶的稳定性和安全性。
自动控制系统可减少人为因素的干预,提高船舶的控制精度和安全性。
当船舶行驶在恶劣环境中时,系统还可以根据实时的环境信息对船舶相应进行调节,并在操作上提高准确性和效率,能够在关键时刻及时预警,保证船舶的稳定性安全。
船舶的稳性
船舶的稳性
3. Mw 计算
M w lw Pw Z w Aw
f ()
式中:Pw—— 单位计算风压(t/m2),Pw=f(航区, Zw); Aw—— 船舶横向受风面积(m2),Aw = f(dm); Zw—— Aw 中心距水线距离(m); lw—— 风压倾侧力臂(m),可从船舶资料中的风压倾侧力臂图表中查取。 三、对船舶稳性的要求 1. 我国 2004 年《法定规则》对非遮蔽航区海船的稳性基本要求: 经自由液面修正后,船舶在整个航程中必须同时满足五项基本衡准要求: (1) GM 0.15m; (2) GZ|=30 0.20m,当f<30°时由 GZ|=f 代替; (3)θ
(m)
式中: MS —— 剩余静稳性力臂,(m)。
Tel: 800-820-0949
船舶的稳性
第四节 静稳性曲线 一、静稳性曲线的绘制(MR = f()或 GZ = f())
二、静稳性曲线的特征值 1. 曲线在原点处的斜率 GM 2. 横倾 30处的复原力臂 GZ|=30 3. 最大复原力臂对应的横倾角smax(极限静倾角) 曲线最高点所对应的横坐标值。 4. 稳性消失角v 在 smax 且 MR = 0 所对应的横倾角。 5. 曲线上反曲点对应角im 通常为甲板浸水角。 6. 静稳性曲线下面积 A2-1 表示复原力矩 MR 所作的功 AR(倾斜后船舶所具有的位能)。 ◎ 大倾角静稳性的衡准指标:GZ|=30、smax、v 和 AR。 三、影响静稳性曲线的因素 1. 对于特定船:与 KG 和有关。 2. 对不同船:与船宽 B、干舷 FB 等因素有关。B 增大时,GM 和 GZ|=30增大,smax 和 v 减小。FB 增大时,GM 不变,但可提高大倾角稳性。
船舶稳性计算及调整—船舶稳性调整

A.在船舶原重心之上加装货物 B.考虑加装甲板货 C.排放双层底压载水舱等压载水
2.稳性过小时
A.在双层底注入压载水 B.改变燃润料、淡水的补给计划 C.注入压载水和改变油水的补给方案,应考虑船舶的总体营运效益问题
三、保证船舶具有适度稳性的经验方法 货物如何安排才能保证船舶稳性?
A 对具有二层舱的普通货船
B 如装甲板货,分配比例为
5 20整
如何调整船舶稳性?
一、船舶稳性的调整
调整船舶重心是改善稳性的根本措施。
1.垂向移动载荷 2.增加或减少载荷
A.稳性过大时,可以在船舶原重心之上增加载荷或在船舶原重心之下减 少载荷;
B.稳性过小时,可以在船舶原重心之上减少载荷或在船舶原重心之下增 加载荷。
二、具 体 措 施
船舶稳性计算
船舶稳性计算
船舶稳性是指船舶在水中的平衡状态。
稳性计算是设计和运营船舶的
重要环节之一,能够确保船舶在航行过程中保持平稳和安全的状态。
本文
将介绍船舶稳性计算的基本原理和方法。
船舶稳性计算的方法包括静态稳性计算和动态稳性计算。
静态稳性计
算是通过计算浮力和重力之间的距离来确定船舶的稳定性。
这个距离被称
为“净上净”。
当净上净值为正时,船舶具有稳定性;当净上净值为零时,船舶处于平衡状态;当净上净值为负时,船舶不稳定,容易倾覆。
动态稳性计算是通过考虑船舶在运动过程中的转矩和惯性力来确定稳
定性。
转矩是指应用在船舶上的力,它会导致船舶产生旋转运动。
惯性力
是指船舶在快速运动或遭遇外界扰动时所受到的力,它会影响船舶的稳定性。
船舶稳性计算的结果可以用于确定船舶的稳性范围和限制条件。
船舶
的稳性范围是指船舶在不同荷载和运动条件下的稳定性区域。
稳性限制条
件是指船舶在不同荷载和运动条件下必须满足的稳定性要求。
这些范围和
条件可以用于制定船舶操作和负载规范,以确保船舶的安全和稳定性。
总之,船舶稳性计算是确保船舶在航行过程中保持平稳和安全的重要
环节。
通过静态稳性计算和动态稳性计算,可以确定船舶的稳性特性,并
制定相应的稳定性范围和限制条件。
这些计算结果对于船舶设计和运营都
具有重要意义,可以确保船舶的安全和稳定性。
船舶稳性

( a ) ( b ) (c) 图 3-1 船舶平衡状态 1.稳定平衡 如图 3-1(a)所示,船 舶横稳心 M 的位置位于重心点 G 的上方。 在船舶受倾侧力矩作用离开平衡位置后, 浮力作用线在外侧, 重力作用线在内侧, 重力和浮力构成的力偶矩 W 为正值,即复原力矩,该复原力矩使船舶恢复到原来平衡位置。 此时船舶所处的平衡状态称为稳定平衡状态(Stable equilibrium) 。 2.不稳定平衡状态 如图 3-1(b)所示,船舶横稳心 M 的位置位于重心点 G 的下方。在船舶受倾侧力矩作 用离开平衡位置后,浮力作用线在内侧,重力作用线在外侧,重力和浮力构成的力偶矩 W 为负值,即倾覆力矩,该倾覆力矩使船舶继续倾斜。此时船舶所处的平衡状态称为不稳定平 衡状态(Unstable equilibrium) 。
第二节 船舶初稳性
一、船舶初稳性的特征 船舶初稳性是船舶稳性在小角度倾斜的前提下的一个特例,具有将稳性问题简化的条 件。 如图 3-2 所示, 在假定正浮时水线附近的舷侧垂直于水面的前提下, 船舶的小角度横倾 具有以下特点: (1)倾斜轴通过初始水线面面积中心,即漂心F; (2)在排水量一定时,船舶的横稳心M(Metacentric Radius)(船舶横倾前后浮力作 用线的交点)的位置可以视作固定不变,浮心B沿着以M为圆心,以稳心半径 B0M 为半径的 圆弧轨迹向倾斜一侧移动。稳心半径 B0M 为浮心 B 至横稳心 M 之间的距离。
货名 重量 (t) 棉布 1300 SF (m /t) 0.74
3
货物容积 (m ) 962
3
占舱容百分 比(%) 31.3
货堆高度 (m) 0.313 7.8=2.44 ×
货物重心高度 (m) 1.5+2.44/2=2.72
船舶稳性知识相关介绍
试验数据处理与结果分析
数据整理
对倾斜试验所得的数据进行整理,绘制相应的曲线图或表格,以 便进行后续分析。
结果分析
根据整理后的数据,分析船舶在不同状态下的稳性表现,如在不同 装载情况下的稳性变化、不同海况下的稳性响应等。
结论与建议
根据分析结果,得出船舶稳性的评价结论,并针对存在的问题提出 改进建议或措施。
船型设计
不同船型对波浪的响应不同, 合理的船型设计有助于提高动
稳性。
装载状态
船舶装载状态直接影响重心位置 和稳性高度GM,进而影响动稳 性。
航速与航向
航速和航向的改变会影响波浪 对船体的作用力和船舶的摇摆 运动。
海况条件
不同海况条件下,波浪的高度 、周期和波向等因素对动稳性
产生显著影响。
04
船舶稳性试验与校核
气象条件
气象条件如风速、风向、浪高等也会对船舶的静 稳性产生影响。在恶劣的气象条件下,船舶的静 稳性可能会受到严重挑战。
03
船舶动稳性分析
动稳性现象描述与分类
01
02
03
摇摆现象
船舶在波浪中产生的周期 性横摇和纵摇运动。
谐摇现象
当波浪频率与船舶固有频 率相近时,船舶摇摆幅度 显著增大的现象。
砰击现象
船舶稳性知识相关介 绍
目录
• 船舶稳性基本概念 • 船舶静稳性分析 • 船舶动稳性分析 • 船舶稳性试验与校核 • 船舶稳性改进与优化措施 • 船舶稳性安全管理与应急处理
01
船舶稳性基本概念
稳性定义及意义
稳性定义
船舶稳性是指船舶在受到外力作用时,能够保持原有平衡状 态或恢复原有平衡状态的能力。它是船舶安全航行的重要保 证。
货运03船舶稳性讲义

第9章 船舶稳性
主讲:张 兢
船舶稳性很重要
Safety First
§ 9—1 船舶稳性分类
1)稳性(stability): 船舶在外力矩(The External moment)作用下 发生倾斜,当外力消除后能自行恢复初始平衡 位置的能力。
2)物理意义: 船舶倾斜后具有复原力矩(righting moment)
MR=ΔGZ
(9.81KN·m)
GZ为复原力臂
MR 与Δ、KG、θ 有关
§ 9—2 船舶初稳性
§ 9—2 船舶初稳性
初稳性 船舶倾角<10°~15°或上甲板边缘开始入 水前的稳性
1)特征: ①倾斜轴过正浮时漂心 ②横稳心M为定点,
横稳心半径BM(r)为定值
§ 9—2 船舶初稳性
2)初稳性的表示方法 ①初稳性方程:
MR = 9.81Δ•GZ = 9.81Δ•GMsinθ
GZ = GMsinθ ②衡量标志:GM ③影响初稳性因素:
Δ ↗、 GM↗ → MR↗
M
L1
W
rΔ
V2
V1θ G Z
L
W1
B0 B1
W
K
§ 9—2 船舶初稳性
三、GM的表达式
GM = KB+BM-KG = KM-KG
h = Zb + r -Zg = Zm - Zg
ixi ——液舱自由液面的面积对横倾轴的惯性矩 (m4)
一、自由液面 对GM值的影响
2. ix的确定:
1)查船舶资料
根据IS 2008 按0度横倾角计算。
一、自由液面对GM值的影响
2)公式计算法 (1)对称的舱柜
ix
1 48
船舶的稳性

知识目标
掌握船舶稳性的基本概念 掌握船舶静性曲线图 掌握船舶稳性的影响因素及提高措施
能力目标
能判定船舶是否具有稳性 能识读船舶静稳性曲线图 能采取措施提高船舶的稳性
概述
船舶在外力作用下离开 平衡位置而倾斜, 船舶 在外力作用下离开平衡位 置而倾斜,当外力消除后 船舶能自行地回 复到原 来平衡位置的能力称为
静稳性曲线图
船舶在某一吃水d和重 心高度Zg时,预先计 算出不同倾角下的静 稳性力臂GZ值,并画 出静稳性力臂随着横 倾角的变化曲线,即 GZ=f(θ),该曲线就 称为静态性曲线
“Mh”表示。
浮心B和稳心M的轨迹
船舶小角度倾斜时,浮心曲线可以近似看 作是一段圆弧线,而它的曲率中心即是 稳心M,即是圆弧线的圆心,所以船舶 从正浮位置倾斜一个小角度时,稳心的 轨迹可以认为是一个固定点。
船舶稳性的基本原理
如上图所示 ,当船舶受到一个横倾力矩M h作用后,正浮向一
侧倾斜一个角度θ 倾斜后:
1.静稳性:船舶在静态横倾力矩作用下 (倾斜过程中无角速度和惯性量)所具 有的稳性;
2.动稳性:船舶在动态横倾力矩作用下 (倾斜过程中带有角速度和惯性量)所 具有的稳性
影响船舶稳性的因素
影响船舶稳性的因素有船体几何形状, 船舶装载状态,船内重物移动,悬挂重 物和自由液面等
如何提高船舶的稳性
(θ≤100
~
150)
,
水线面由
W
L
移至
W1L1,
①重力W大小不变,因为在倾斜过程中没有重物的增减;
②重心G位置不变,因为在倾斜过程中没有重物移动
③浮力D大小不变,因为重量不变,所以排水量也不变
④只有浮心B的位置因排水体积形状变化而改变,由原来的B 向倾 斜一侧移至B 斜一侧移至B l
第四章 船舶稳性资料

MR = GMsin GM可以作为衡量船舶大小的标志。欲使 船舶具有二节 船舶稳性的计算
2.初稳性衡准指标 GM计算
(1)基本计算法 GM = KM - KG0 式中:KM —— 横稳心距基线高度(m), KM=KB+BM或者KM = f(dm); KG0 —— 船舶重心距基线高度(m);
f d m
2019/1/14
第一节 稳性的基本概念
三、船舶的三种平衡状态(equilibrium) 1.稳定平衡:重心G在稳心M之下,MR为正值。 2.不稳定平衡:重心G在稳心M之上, MR为负值。 3.随遇平衡:重心G与稳心M重合, MR为零。
2019/1/14
第一节 稳性的基本概念
(ii)舱容曲线图法 (iii)舱内货物合重心法
2019/1/14
第二节 船舶稳性的计算
(i) Zi确定方法:估算法
2019/1/14
第二节 船舶稳性的计算
(ii) Zi确定方法:舱容曲线图
2019/1/14
(iii) Zi确定方法:舱内货物合重心法
以舱内所装货物的合体积中心作为该舱货物的合重心 (如果货舱已满仓,则取舱容中心作为货物的合重心)—— 合体积中心计算方法同上述方法(i) 配货的一般原则是重货在下、轻货在上,因此将货物合 体积重心作为该舱货物的合重心是一种偏安全的做法。
2019/1/14
第一节 稳性的基本概念
二、几个基本概念 2. (横)稳心(Metacenter)M: 船舶微倾前后浮力作用线的交点。其距基线的 高度KM = f(dm)可从船舶资料中查取。
2019/1/14
第一节 稳性的基本概念
二、几个基本概念 3.(横)稳心半径(Metacentric radius)BM: IT BM 浮心B点到稳心M点之间的距离。 式中:IT —— 水线面面积横向惯性矩(m4);
第四章船舶稳性
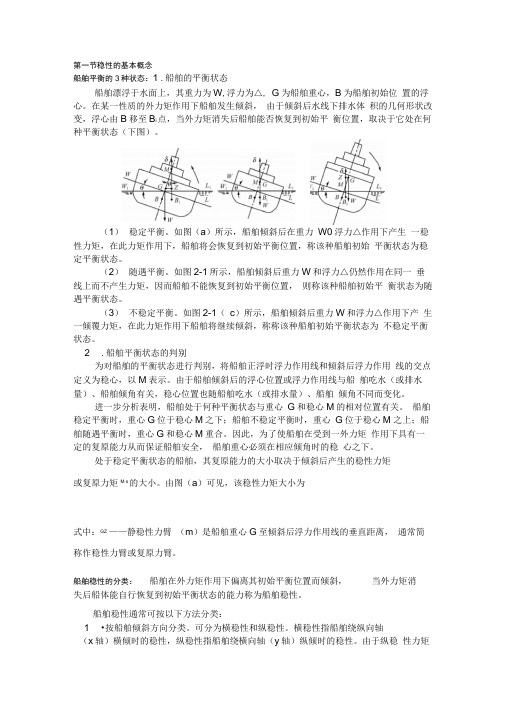
第一节稳性的基本概念船舶平衡的3种状态:1 .船舶的平衡状态船舶漂浮于水面上,其重力为W,浮力为△, G为船舶重心,B为船舶初始位置的浮心。
在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B移至B i点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。
(1)稳定平衡。
如图(a)所示,船舶倾斜后在重力W0浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。
(2)随遇平衡。
如图2-1所示,船舶倾斜后重力W和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。
(3)不稳定平衡。
如图2-1(c)所示,船舶倾斜后重力W和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。
2 .船舶平衡状态的判别为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M表示。
由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。
进一步分析表明,船舶处于何种平衡状态与重心G和稳心M的相对位置有关。
船舶稳定平衡时,重心G位于稳心M之下;船舶不稳定平衡时,重心G位于稳心M 之上;船舶随遇平衡时,重心G和稳心M重合。
因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩M s的大小。
由图(a)可见,该稳性力矩大小为式中:GZ——静稳性力臂(m)是船舶重心G至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。
船舶稳性的分类:船舶在外力矩作用下偏离其初始平衡位置而倾斜,当外力矩消失后船体能自行恢复到初始平衡状态的能力称为船舶稳性。
船舶稳性(船舶管理课件)
任务三 船舶稳性
四、影响船舶稳性的因素
5.悬挂重物对稳性的影响
悬挂对船舶稳性的影响, 相当于把质量为p的重物 从位置q1垂直上移至悬 挂点M,对稳性影响的 效果是一样的。
任务三 船舶稳性
四、影响船舶稳性的因素
6.散货的装载对稳性的影响
用散装方式进行运输的货物称为散装货物,如粮食、矿砂、 煤炭等。散装货船有时由于各种原因导致船舱不满,货物 在船舶横摇或横倾时会发生倾斜,使船舶重心发生横向移 动,从而产生与自由液面类似的影响,使船舶稳性降低。
一、稳性分类 船舶稳性分类
倾斜方向
倾斜角度
作用力性质
破损与否
横纵 稳稳 性性
大 初倾 稳角 性稳
性
静动 稳稳 性性
完破 整舱 稳稳 性性
任务三 船舶稳性
二、船舶初稳性
船舶在一横倾力矩Mh 作用下,从正浮位置
倾斜一个小角度
(<10°~15°)时 的船舶稳性,即初稳 性问题。
1.稳心M 2.稳心半径r(BM) 3.初稳性高度GM
三、船舶稳性的基本衡准
1.静态与动态横倾力矩
(1)静态横倾力矩 静态横倾力矩就是船舶处于静平衡时作用在船上的横倾力矩。 (2)动态横倾力矩 作用在船上使船舶的倾斜过程产生角加速度的横倾力矩称为 动态横倾力矩
任务三 船舶稳性 三、船舶稳性的基本衡准
2.静平衡与动平衡 (1)静平衡
船舶在静态横倾力矩作用下,稳性应满足的条件为:Mh ≤ Msm。
任务三 船舶稳性 三、船舶稳性的基本衡准
2.静平衡与动平衡 (2)动平衡
动平衡的条件为Wh= Ws,故船舶的动平衡是功的平衡。 船舶在动态横倾力矩作用下的平衡称为动平衡。
任务三 船舶稳性 三、船舶稳性的基本衡准
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Tel: 800-820-0949
船舶的稳性
第二节 初稳性计算
一、初稳性衡准指标 GM 计算 1. GM = KM - KG0 - GMf 式中:KM —— 横稳心距基线高度(m),KM = f(dm); KG0 —— 船舶重心距基线高度(m)。 2. KG0 计算
KG0 Pi Z i
smax
max{25°, f },当船舶宽深比>2.0 时,该要求可适当放宽;
(4)θ v 55°,99 和 04 版《法定规则》该项要求已被取消。 (5) K 1.00 2. 对国际航线海船的稳性衡准要求 我国 99《法定规则》和 IMO 规定:经自由液面修正后,船舶在整个航程中要求同 时满足: (1)GM 0.15m; (2)复原力臂曲线在横倾角 0°~30°之间所围面积应不小于 0.055m·rad; (3) 复原力臂曲线在横倾角 0 °~ 40 °或进水角中较小者之间所围面积应不小于 0.090m·rad; (4)复原力臂曲线在横倾角 30°~40°或进水角中较小者之间所围面积应不小于 0.030m·rad; (5)GZ|=30 0.20m; (6)θ
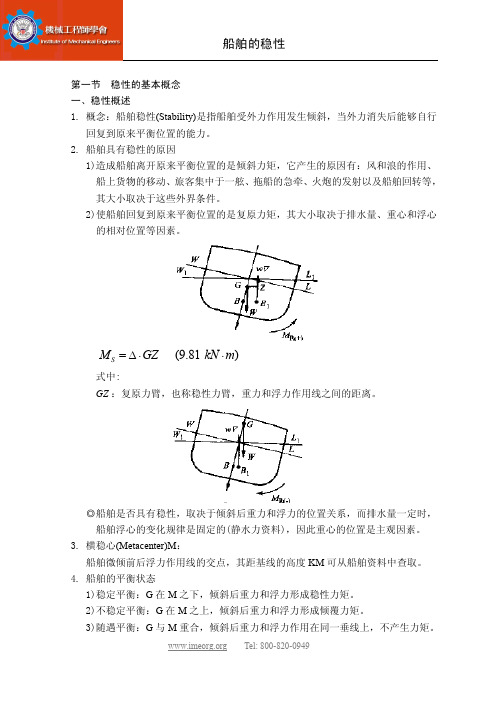
M S GZ
式中:
(9.81 kN m)
GZ :复原力臂,也称稳性力臂,重力和浮力作用线之间的距离。
◎船舶是否具有稳性,取决于倾斜后重力和浮力的位置关系,而排水量一定时, 船舶浮心的变化规律是固定的(静水力资料),因此重心的位置是主观因素。 3. 横稳心(Metacenter)M: 船舶微倾前后浮力作用线的交点,其距基线的高度 KM 可从船舶资料中查取。 4. 船舶的平衡状态 1)稳定平衡:G 在 M 之下,倾斜后重力和浮力形成稳性力矩。 2)不稳定平衡:G 在 M 之上,倾斜后重力和浮力形成倾覆力矩。 3)随遇平衡:G 与 M 重合,倾斜后重力和浮力作用在同一垂线上,不产生力矩。
Tel: 800-820-0949
船舶的稳性
如下图所示
例如: 1)圆锥在桌面上的不同放置方法; 2)悬挂的圆盘 5. 船舶具有稳性的条件:初始状态为稳定平衡,这只是稳性的第一层含义;仅仅具 有稳性是不够的,还应有足够大的回复能力,使船舶不致倾覆,这是稳性的另一 层含义。 6. 稳性大小和船舶航行的关系 1)稳性过大,船舶摇摆剧烈,造成人员不适、航海仪器使用不便、船体结构容易 受损、舱内货物容易移位以致危及船舶安全。 2)稳性过小,船舶抗倾覆能力较差,容易出现较大的倾角,回复缓慢,船舶长时 间斜置于水面,航行不力。 二、稳性的分类 1. 按船舶倾斜方向分为:横稳性、纵稳性 2. 按倾角大小分为:初稳性、大倾角稳性 3. 按作用力矩的性质分为:静稳性、动稳性 4. 按船舱是否进水分为:完整稳性、破舱稳性 三、初稳性 1. 初稳性假定条件: 1)船舶微倾前后水线面的交线过原水线面的漂心 F; 2)浮心移动轨迹为圆弧段,圆心为定点 M(稳心),半径为 BM(稳心半径)。 2.初稳性的基本计算 初稳性方程式:MR = GMsin GM = KM - KG
f B GM 0 T
2
式中:f —— 横摇周期系数,一般货船 f = 0.73~0.88。 2. 停泊中检验 —— 横向移动或加减载荷 设横向移动 P(t),船舶产生横倾角,则: PY = GMtg 或:
GM P Y tg
式中:Y —— P 重心横移的距离,右移取“+” 左移取“-” 。 3. 观察船舶征状 MR↓ = GM↓sin GM0↓= f(T↑) 当受到较小外力矩作用时,船舶会发生明显的横倾,且其横摇极其缓慢。
Tel: 800-820-0949
船舶的稳性
四、悬挂载荷对 GM 的影响 设悬挂物重 P 吨,其初始重心至悬挂点的垂 直距离 l,船舶的横倾角,则:
M R GM 0 sin l P sin
lP GM 0 sin
s d 静倾角s:船舶在静力作用下的最大横倾角。 动倾角d:船舶在动力作用下的最大横倾角。 二、动稳性的衡准指标 1. 稳性衡准数 K 的计算
K M h min lh min Mw lw
式中:Mhmin、lhmin—— 最小倾覆力矩和力臂,即使船舶发生倾覆的最小 矩和力臂;
三、船舶稳性的检验方法 1. 航行中检验 —— 实测横摇周期 T T:船舶横摇一个全摆程(四个摆幅)所需时间(s)。 (1)《法定规则》推荐公式
B 2 4 KG0 2 T 0.58 f GM 0
式中:B —— 船舶型宽(m); GM0 —— 未经自由液面修正的初稳性高度(m); f ——系数,由 B/dm 查表。 (2)经验公式
Tel: 800-820-0949
船舶的稳性
3. Mw 计算
M w lw Pw Z w Aw
f ()
式中:Pw—— 单位计算风压(t/m2),Pw=f(航区, Zw); Aw—— 船舶横向受风面积(m2),Aw = f(dm); Zw—— Aw 中心距水线距离(m); lw—— 风压倾侧力臂(m),可从船舶资料中的风压倾侧力臂图表中查取。 三、对船舶稳性的要求 1. 我国 2004 年《法定规则》对非遮蔽航区海船的稳性基本要求: 经自由液面修正后,船舶在整个航程中必须同时满足五项基本衡准要求: (1) GM 0.15m; (2) GZ|=30 0.20m,当f<30°时由 GZ|=f 代替; (3)θ
动倾外力
Mw、 lw—— 风压倾侧力矩和力臂,即设定的恶劣海况下风压对船舶的动 倾力矩和力臂。 2. Mhmin 求法 ①绘制动稳性曲线 ld = f() 利用动稳性曲线是静稳性曲线的面积曲线原理绘制。 ②在 ld = f()曲线上作两项修正: 横摇角i 修正 进水角f 修正 ③按定义在曲线上量取 lhmin(Mhmin = lhmin)
KG KG0
ix
GZ —— 复原力臂(m),GZ = KN - KH。 2. 假定重心点法
GZ GA Z A ( KG0 KGA ) sin
KGA —— 假定重心高度。 3. 稳心点法
(m)
式中: GAZA—— 假定重心高度的静稳性力臂;
GZ MS GM 0 sin
Tel: 800-820-0949
船舶的稳性
第五节 动稳性曲线、对船舶稳性的要求 一、与静稳性的区别
静 受力性质 表 征 平衡条件 静态外力作用
稳
性
动 动态外力作用
稳
性
复原力矩 MR(力臂 GZ) MR = பைடு நூலகம்GZ
MR 所作功 AR(力臂 ld) AR = ld
当 MR = Mh 时,船舶平衡于静倾角 当 AR = Ah 时,船舶平衡于动倾角
船舶的稳性
第一节 稳性的基本概念
一、稳性概述 1. 概念:船舶稳性(Stability)是指船舶受外力作用发生倾斜,当外力消失后能够自行 回复到原来平衡位置的能力。 2. 船舶具有稳性的原因 1)造成船舶离开原来平衡位置的是倾斜力矩,它产生的原因有:风和浪的作用、 船上货物的移动、旅客集中于一舷、拖船的急牵、火炮的发射以及船舶回转等, 其大小取决于这些外界条件。 2)使船舶回复到原来平衡位置的是复原力矩,其大小取决于排水量、重心和浮心 的相对位置等因素。
smax
30°,至少不小于 25°;
Tel: 800-820-0949
(7)满足天气衡准要求。
船舶的稳性
第六节 稳性校验与调整 一、船舶稳性的校核 船舶每一航段对稳性最不利装载情况下必须满足: 经自由液面修正:GM GMc + 0.2 未经自由液面修正:GM0 GM|T =9s 二、保证适度稳性的经验方法 按合适比例控制各层舱配货重量。 例如: 二层舱 杂货船 满载时 非底舱货约占货总重 35% (甲板货10%,甲板货货堆高度(1/5~1/6)B) 底舱货约占货总重 65% (m) (m)
ix l b1 b2 b12 b22 48
其中:l —— 舱长(m); b1、 b2 —— 前、 后边宽(m)。 矩形液面:
ix l b3 12
其中: b —— 矩形边宽(m)。
Tel: 800-820-0949
船舶的稳性
第三节 大倾角稳性及计算 一、大倾角稳性与初稳性的区别 1. 大倾角时,不再等容倾斜,倾斜轴不再过初始漂心 F; 2. 横稳性不再是定点,而随横倾角变化而变化; 3. 大倾角稳性用 GZ 衡量稳性大小,不能直接以 GM0 作为其衡准指标。 二、大倾角稳性的表示方法 1. 基点法 MR = GZ = (KN - KH) 式中:KN —— 形状稳性力臂(m),KN = f(,),可从“稳性横交曲线”中查取; KH —— 重量稳性力臂(m),KH = KGsin, 通常取:
(m)
式中: MS —— 剩余静稳性力臂,(m)。
Tel: 800-820-0949
船舶的稳性
第四节 静稳性曲线 一、静稳性曲线的绘制(MR = f()或 GZ = f())
二、静稳性曲线的特征值 1. 曲线在原点处的斜率 GM 2. 横倾 30处的复原力臂 GZ|=30 3. 最大复原力臂对应的横倾角smax(极限静倾角) 曲线最高点所对应的横坐标值。 4. 稳性消失角v 在 smax 且 MR = 0 所对应的横倾角。 5. 曲线上反曲点对应角im 通常为甲板浸水角。 6. 静稳性曲线下面积 A2-1 表示复原力矩 MR 所作的功 AR(倾斜后船舶所具有的位能)。 ◎ 大倾角静稳性的衡准指标:GZ|=30、smax、v 和 AR。 三、影响静稳性曲线的因素 1. 对于特定船:与 KG 和有关。 2. 对不同船:与船宽 B、干舷 FB 等因素有关。B 增大时,GM 和 GZ|=30增大,smax 和 v 减小。FB 增大时,GM 不变,但可提高大倾角稳性。