导线平面控制网平差报告
平面控制测量平差报告

平面控制测量平差报告
1. 项目概述,报告应该包括对测量项目的概述,包括测量的目的、范围和所涉及的地理区域。
2. 测量方法,报告应该详细描述所使用的测量方法和技术,包括测量设备、测量过程和数据处理方法。
3. 测量结果,报告应该给出测量结果的详细描述,包括测量点的坐标、高程等信息。
这些结果通常以表格、图表或地图的形式呈现,以便清晰展示测量数据。
4. 数据分析,报告应该对测量数据进行分析,包括误差分析、精度评定等内容,以确保测量结果的可靠性和准确性。
5. 结论与建议,报告应该对测量结果进行总结,提出结论并给出针对性的建议,包括可能存在的问题、改进措施等。
6. 建议使用范围,报告应该明确指出测量结果的适用范围和限制条件,以便用户正确理解和使用测量数据。
总的来说,平面控制测量平差报告是对平面控制测量工作进行全面总结和分析的文件,旨在为相关利益相关方提供清晰的测量数据和建议,以支持工程设计、土地规划、地图制作等相关工作的进行。
使用 PA2005 软件进行导线精密平差
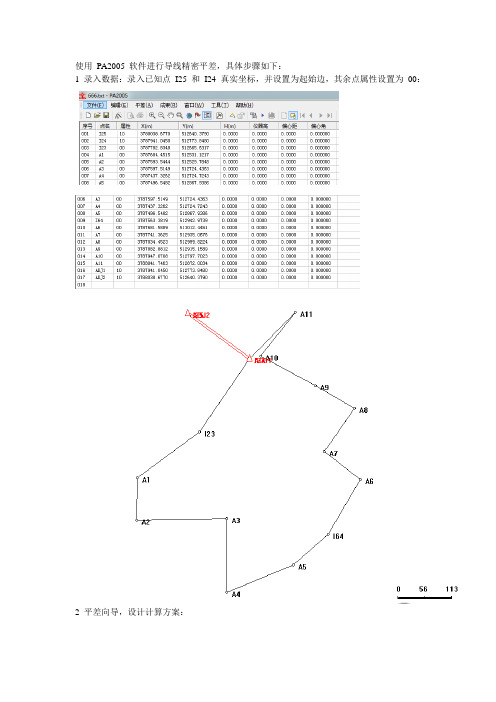
使用PA2005 软件进行导线精密平差,具体步骤如下:1 录入数据:录入已知点I25 和I24 真实坐标,并设置为起始边,其余点属性设置为00:2 平差向导,设计计算方案:3 平差计算:4 闭合差计算:5 控制网平差报告:控制网平差报告计算软件:南方平差易2005网名:计算日期:2015-11-5观测人:王宁宁记录人:王冬计算者:熊猛猛检查者:测量单位:备注:平面控制网等级:城市二级,验前单位权中误差:1.41(s)已知坐标点个数:4未知坐标点个数:13未知边数:14最大点位误差[A5] = 0.0425 (m)最小点位误差[A11] = 0.0206 (m)平均点位误差= 0.0344 (m)最大点间误差= 0.0312(m)最大边长比例误差= 4626平面网验后单位权中误差= 4.21 (s)[边长统计]总边长:1900.251(m),平均边长:135.732(m),最小边长:90.917(m),最大边长:194.692(m)[闭合差统计报告]序号:<1>:附合导线路径:[ADJ2-ADJ1-A11-A10-A9-A8-A7-A6-I64-A5-A4-A3-A2-A1-I23-I24-I25]角度闭合差=-44.00(s),限差=±10.92(s)fx=0.006(m),fy=0.068(m),fd=0.068(m)总边长[s]=1900.251(m),全长相对闭合差k=1/27966,平均边长=135.732(m)[方向观测成果表][平面点位误差表]5.3.7 坐标转换参数计算已知点录入:计算结果:可由DX、DY、R 和DK 值算得四参数为:a=DK*COSR=0.999868617;b=DK*sinR=-0.016392281;c=DX=3788038.6761196m ;d=DY=512640.380192 5588m。
建筑测量中的平面控制点设置和平差处理方法

建筑测量中的平面控制点设置和平差处理方法在建筑测量过程中,平面控制点的设置和平差处理是非常重要的环节。
平面控制点的准确设置和合理处理,可以确保施工过程中的精度和质量,进一步提高建筑工程的效率和安全,本文将探讨建筑测量中平面控制点设置和平差处理的方法和技巧。
一、平面控制点的设置平面控制点的设置是建筑测量中最基础的环节之一,它确定了测量网络的框架,是实际测量的基准。
平面控制点的设置应当根据具体的项目需求和测量任务的要求来确定。
一般来说,平面控制点的设置应当满足以下几个条件:1. 充分考虑建筑结构的形式和特点,合理选择控制点的数量和布局。
2. 控制点的设置应尽量避免误差的积累,尽可能选择较为稳定的地形或建筑物作为控制点。
3. 控制点的设置应分散布置,以确保整个测量区域都有足够的控制点支持。
4. 控制点的设置应与建筑物相关,可以与其它测量项目相配合,提高工作的综合效益。
平面控制点的设置影响了整个建筑测量的精度和准确性,要充分考虑控制点的数量、精度和分布,以满足具体项目的需求,并避免误差的积累与成倍增加。
二、平差处理方法平差处理是建筑测量中必不可少的环节,它用于处理测量数据的平差和改正,使得数据更加精确和可靠。
下面我们将介绍常用的平差处理方法。
1. 最小二乘法平差处理方法最小二乘法平差处理方法是建筑测量中最常用的平差方法之一。
它通过最小化测量残差的平方和,来估计未知数的值。
最小二乘法平差处理方法具有计算简单、可靠性高等特点,广泛应用于各种建筑测量项目中。
2. 导线平差处理方法导线平差处理方法主要用于建筑测量中的距离测量。
它通过考虑导线的伸缩性和缓倾性,来进行距离测量数据的平差和改正。
导线平差处理方法可以有效提高距离测量的精度和准确性。
3. 角度平差处理方法角度平差处理方法主要用于建筑测量中的角度测量。
它通过考虑观测角度的误差和仪器误差等因素,来进行角度测量数据的平差和改正。
角度平差处理方法可以在一定程度上提高角度测量的精度和准确性。
导线平差_精品文档
导线平差导线平差是指在测量或建设中进行的一项重要的技术工作,主要是为了保证导线的水平和垂直度,确保测量结果的准确性和可靠性。
在工程测量中,导线平差是不可或缺的一环,它可以帮助测量人员更好地掌握实地的情况,从而更准确地进行导线的布设和定位。
导线平差的原理是根据测量数据进行误差分析和修正,通过一系列的计算和调整,可以得到最为精确的导线位置和方向。
具体来说,导线平差包括两个方面的工作:平差计算和平差调整。
平差计算是根据测量数据,结合误差理论和数学方法,计算出导线的真实位置和方向;平差调整是通过人工或仪器,对导线进行微调,以保证导线的准确性。
在导线平差中,最常用的计算方法是最小二乘法。
最小二乘法是一种通过最小化测量数据与理论模型之间的偏差,来求解未知量的一种数学方法。
在导线平差中,我们可以将导线的真实位置和方向作为未知量,通过最小二乘法求解出来。
最小二乘法的基本原理是将导线的测量数据表示为一组方程组,其中未知量为导线的位置坐标和方向角。
通过最小二乘法,可以求解出最优解,使得测量数据与理论模型之间的偏差最小。
在计算过程中,需要考虑测量误差和观测精度对最终结果的影响。
除了最小二乘法,导线平差还可以采用其他的计算方法,如加权平差法和GPS平差法等。
这些方法在实际应用中,可以根据具体情况选择合适的方法。
导线平差的调整工作是为了进一步提高导线的准确性和可靠性。
在平差调整中,可以采用各种手段,如利用导线标杆进行修正、使用仪器进行微调等。
通过这些调整工作,可以使导线的位置和方向更加准确,从而提高测量结果的质量。
导线平差在工程测量中具有重要的应用价值。
首先,导线平差可以减小测量误差,提高测量精度。
导线平差可以根据实地情况进行修正,避免由于环境和操作因素引起的误差。
其次,导线平差可以提高导线的可靠性和稳定性。
通过导线平差的调整工作,可以使导线的位置和方向更加准确,从而保证测量结果的可靠性。
最后,导线平差可以为后续的工作提供基础。
GNSS控制网观测与平差
在GPS观测技术出现之前,一般平面控制网都是采用三角网、导线网等形式进行观测。
90年代我国引入了GPS观测技术,由于其精度高且控制点间不需通视的优点,很快就成为平面控制网的主要观测手段。
现在除美国的GPS以外,还有俄罗斯的格洛纳斯(GLONASS),欧盟的伽利略(Galileo)和中国的北斗(BD)等全球卫星导航系统,都可以为我们提供全球高精度的导航定位服务。
全球卫星导航系统简称GNSS,原来的GPS接收机发展到现在基本上都能同时接收GPS、GLONASS、Galileo、BD等卫星信号,所以现在在称为GPS接收机已经不太准确,一般称为GNSS接收机,原来的GPS观测技术也扩展为GNSS观测技术,采用GNSS技术进行观测的平面控制网则称为GNSS控制网。
本文就GNSS控制网的观测和平差进行介绍。
一、GNSS控制网的设计GNSS控制网设计最重要的是确定控制网的等级。
GNSS测量规范比较多,有国家标准也有行业标准。
由于不同的规范对等级的规定不一致,比如《全球定位系统(GPS)测量规范》中规定的等级为B、C、D、E(A级为连续运行参考站网),《全球定位系统(GPS)铁路测量规程》也是B、C、D、E四级,《卫星定位城市测量技术规范》、《城市测量规范》和《工程测量规范》中规定的精度级别为二等、三等、四等、一级、二级,《公路全球定位系统(GPS)测量规范》中规定的等级为一级、二级、三级、四级。
所以要确定GNSS控制网的等级,首先要确定采用的技术依据,也就是用哪个规范。
这个就要根据实际的需求来进行确定,如果实在不确定采用哪个规范,可以直接采用国家标准《全球定位系统(GPS)测量规范》。
图1 《全球定位系统(GPS)测量规范》中的精度等级规定图2 《工程测量规范》中的精度等级规定根据采用的规范确定好GNSS控制网的等级后,就可以根据规范的相关规定进行具体的技术设计。
主要有坐标系统的确定,起算点的选择,控制点点位及布网概略设计,采用的GNSS接收机与数据处理软件及平差软件,控制网观测、数据处理及平差技术要求及上交成果资料等内容。
平面控制网复测报告(2)

水准点、导线加密控制点测量成果报告编制:审核:审批:河南省中原路桥建设(集团)有限公司国道G353大岩洞至雷波县城段改建工程B合同段项目部2016年4月7 日目录一、工程概况: 0二、设计文件提供测量控制点完好情况: 0三、复测技术依据及方案: 0四、导线点高程复测方案: (2)五、附件: (4)1、控制导线测量示意图 (3)2、导线点测量原始记录表 (7)3、导线点平差计算表 (21)4、水准测量原始记录表 (23)5、水准测量成果计算表 (56)6、导线点成果一览表 (59)7、人员名单及资质 (63)8、全站仪、水准仪清单 (65)9、测量仪器校检登记表 (66)一、工程概况:本项目为大岩洞至雷波县城段改建工程,主建单位四川兴蜀公路建设发展有限公司,设计单位四川省交通运输厅交通勘察设计研究院,承建单位河南省中原路桥有限公司---G353大岩洞至雷波县城段改建工程B合同段项目经理部,起止桩号K46+780-—K80+000。
本标段路线起于大岩洞,终于雷波县城段,路线全长33公里,主要控制点:雷波县城,汶水镇.本项目设计路段全长33.223公里,K46+780—K76+840路基宽度7。
5m,K76+840—K80+000路基宽度8。
5m。
采用双向两车道,行车道为2×3。
5m,路肩宽0。
75m(局部受限制路基宽度7。
5m)。
二、设计文件提供测量控制点完好情况:根据四川省交通运输厅交通勘察设计院提供的导线测量控制点(根据招标文件)共有27个点,并且G04、G09、G10控制桩被车碾压,高程不可用。
经过我项目部测量队有关技术人员进场对标段测量控制点寻找对点发现控制点D13在防护栏下边,仪器无法架设,D10控制点被破坏.三、复测技术依据及方案:1、以四川省交通规划设计院文件及相关图纸控制点为主要依据。
2、根据总监办文件要求,控制点测量精度为1级导线和四等水准。
采用的仪器及测量方法符合《公路勘测规范》JTG C10—2007的有关要求.但是结合道路实际线形情况,道路大多为曲线形,导线通视很受限制,无法保证一级导线长度4公里,平均边长O。
控 制 网 平 差 报 告122222
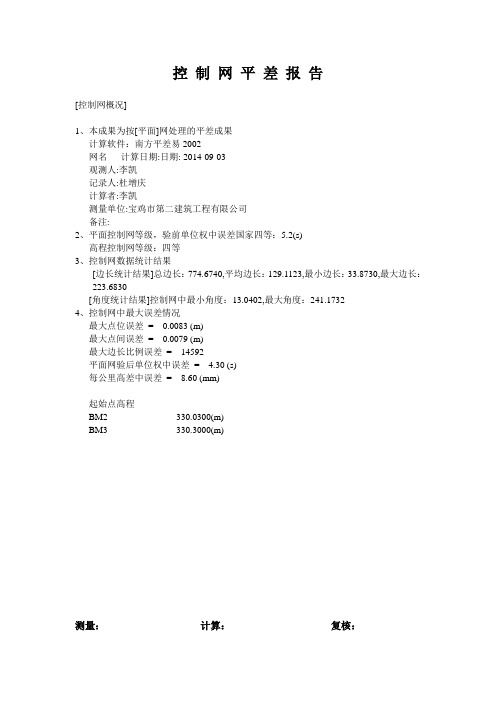
控制网平差报告[控制网概况]1、本成果为按[平面]网处理的平差成果计算软件:南方平差易2002网名计算日期:日期: 2014-09-03观测人:李凯记录人:杜增庆计算者:李凯测量单位:宝鸡市第二建筑工程有限公司备注:2、平面控制网等级,验前单位权中误差国家四等:5.2(s)高程控制网等级:四等3、控制网数据统计结果[边长统计结果]总边长:774.6740,平均边长:129.1123,最小边长:33.8730,最大边长:223.6830[角度统计结果]控制网中最小角度:13.0402,最大角度:241.17324、控制网中最大误差情况最大点位误差= 0.0083 (m)最大点间误差= 0.0079 (m)最大边长比例误差= 14592平面网验后单位权中误差= 4.30 (s)每公里高差中误差= 8.60 (mm)起始点高程BM2 330.0300(m)BM3 330.3000(m)测量:计算:复核:闭合差统计报告[方向观测成果表]测站照准方向值(dms) 改正数(s) 平差后值(dms)备注BM2 BM3 0.000000BM2 A1 167.555375 1.02 167.555477BM3 A3 0.000000BM3 BM2 16.184275 1.08 16.184383A1 BM2 0.000000A1 A2 101.234150 1.12 101.234262A2 A1 0.000000A2 A3 13.040175 3.76 13.040551A3 A2 0.000000A3 BM3 241.173200 1.27 241.173327[距离观测成果表]测站照准距离(m) 改正数(m) 平差后值(m)方位角(dms) BM2 BM3 33.8730 0.0097 33.8877 131.505766 AM2 A1 137.4260 -0.0050 137.4210 299.465243 BM3 BM2 33.8730 0.0097 33.8877 311.505766 A1 A2 223.6830 -0.0007 223.6823 221.103504 A2 A3 223.1390 0.0019 223.1409 54.144055A3 BM3 122.6800 0.0050 122.6850 115.321383 测量:计算:复核:[高差观测成果表]测段起点号测段终点号测段距离(m) 测段高差(m) BM2 BM3 33.8730 0.2490BM2 A1 137.4260 -1.6955BM3 BM2 33.8730 -0.2490A1 A2 223.6830 -0.4440A2 A3 223.1390 1.3005A3 BM3 122.6800 1.1970[平面点位误差表]点名长轴(m) 短轴(m) 长轴方位dms 点位中误差m备注A1 0.0084 0.0043 114.533158 0.0074 A2 0.0114 0.0086 140.480966 0.0083 A3 0.0084 0.0038 112.183710 0.0082[高程平差结果表]点号高差改正数(m) 改正后高差(m)高程中误差(m)平差后高程(m)备注BM2 0.0000 330.0300 已知点BM3 0.0000 0.2490 0.0076 330.2790BM2 0.0000 330.0300 已知点A1 -0.0171 -1.7126 0.0066 328.3174BM3 0.0000 330.3000 已知点BM2 -0.0000 -0.2490 0.0082 330.0510A1 0.0079 328.3174A2 -0.0278 -0.4718 0.0071 327.8455A2 0.0084 327.8455A3 -0.0278 1.2727 0.0074 329.1183A3 0.0086 329.1183BM3 -0.0153 1.1817 0.0000 330.3000 已知点测量:计算:复核:[平面点间误差表]备注点名点名MT(m) MD(m) D/MD T方位D距离(m)BM2 A1 0.0094 0.0083 16465 114.533158 137.4210BM3 A3 0.0092 0.0084 14592 112.183710 122.6850A1 BM2 0.0094 0.0083 16465 114.533158 137.4210A1 A2 0.0119 0.0081 27654 97.155695 223.6823A2 A1 0.0119 0.0081 27654 97.155695 223.6823A2 A3 0.0120 0.0083 26735 96.081365 223.1409A3 A2 0.0120 0.0083 26735 96.081365 223.1409A3 BM3 0.0092 0.0084 14592 112.183710 122.6850[控制点成果表]点名X(m) Y(m) H(m) 备注BM3 3619471.7200 498886.5320 330.3000 已知点BM2 3619494.3290 498861.2890 330.0300 已知点BM3 3619471.7200 498886.5320 330.3000 已知点BM2 3619494.3290 498861.2890 330.0300 已知点A1 3619562.5846 498742.0174 328.3174A2 3619394.2220 498594.7496 327.8455A3 3619524.6091 498775.8327 329.1183测量:计算:复核:。
控 制 网 平 差 报 告3.15

控制网平差报告3.15南部滨海大道东端桥隧建设工程隧道第三标段导线复测成果报告滨海大道项目经理部2013年3月15日控制网平差报告[控制网概况]本次测量对三标段内控制点进行复测。
1、本成果为按[平面]网处理的平差成果计算软件:南方平差易2002网名滨海隧道支线南线导线测量计算日期:日期: 2013-03-15观测人:张志辉记录人:王亮计算者:陈冬雨立镜:邢亮、费腾测量单位:中铁九局滨海大道项目部备注:2、平面控制网等级,验前单位权中误差国家四等:2.5(s)高程控制网等级:3、控制网数据统计结果[边长统计结果]总边长:2783.6895,平均边长:198.8350,最小边长:39.3430,最大边长:447.2510 [角度统计结果]控制网中最小角度:4.1650,最大角度:103.55183、控制网中最大误差情况最大点位误差= 0.0046 (m)最大点间误差= 0.0071 (m)最大边长比例误差= 24175平面网验后单位权中误差= 2.73 (s) 每公里高差中误差= 78.53 (mm)起始点高程GS05 46.2850(m)GS04 37.9550(m)闭合差统计报告几何条件:闭合导线路径:[GS04-S1-GS05]角度闭合差=0(s),限差=9(s)[s]=911.784(m),k=1/85882,平均边长=303.928(m)几何条件:闭合水准路径:[]高差闭合差=31.5(mm),限差=30.9(mm)路线长度=0.382(km)几何条件:闭合导线路径:[S1-F2-GS05]角度闭合差=-5(s),限差=9(s)fx=-0.006(m),fy=0.006(m),fd=0.009(m)[s]=210.301(m),k=1/24266,平均边长=70.100(m)几何条件:闭合水准路径:[]高差闭合差=20.0(mm),限差=6.4(mm)路线长度=0.016(km)几何条件:闭合导线路径:[F2-S0-S1]角度闭合差=1(s),限差=9(s)[s]=402.580(m),k=1/56854,平均边长=134.193(m)几何条件:闭合水准路径:[]高差闭合差=33.5(mm),限差=12.3(mm)路线长度=0.061(km)[方向观测成果表]测站照准方向值(dms) 改正数(s)平差后值(dms)备注GS05 GS04 0.000000GS05 S1 53.455900 -0.54 53.455846GS05 F2 154.560700 -2.56 154.560444GS04 S1 0.000000GS04 GS05 4.16500.48 4.165025 73S1 F2 0.000000S1 GS05 54.261500 -1.87 54.261313S1 S0 158.213313 -0.03 158.213310S1 GS04 176.232550 -1.56 176.232394F2 GS05 0.000000F2 S0 12.421500 -3.58 12.421142F2 S1 24.234188 -0.99 24.234089S0 S1 0.000000S0 F2 9.565850 -1.07 9.565743[三角高程观测成果表]测站照准距离(m) 垂直角(dms)仪器高(m)觇标高(m)GS05 GS04 447.24900.0000 0.0000 0.0000GS05 S1 39.3430.0000 0.0000 0.0000GS05 F2 77.49350.0000 0.0000 0.0000GS04 S1 425.17900.0000 0.0000 0.0000GS04 GS05 447.25100.0000 0.0000 0.0000S1 F2 93.4650.0000 0.0000 0.0000S1 GS05 39.3450.0000 0.0000 0.0000S1 S0 109.62100.0000 0.0000 0.0000S1 GS04 425.18100.0000 0.0000 0.0000F2 GS05 77.4930.0000 0.0000 0.0000F2 S0 199.49250.0000 0.0000 0.0000F2 S1 93.4650.0000 0.0000 0.0000S0 S1 109.62200.0000 0.0000 0.0000S0 F2 199.48950.0000 0.0000 0.0000 [高差观测成果表]测段起点号测段终点号测段距离(m) 测段高差(m)GS05 GS04 447.2490 -8.3540GS05 S1 39.3430 9.1670 GS05 F2 77.4935 19.1265 GS04 S1 425.1790 17.4820 GS04 GS05 447.2510 8.3033 S1 F2 93.4650 9.9825 S1 GS05 39.3450 -9.1205 S1 S0 109.6210 -4.8690 S1 GS04 425.1810 -17.4788F2 GS05 77.4930 -19.1295F2 S0 199.4925 -14.835F2 S1 93.4650 -9.9420 S0 S1 109.6220 4.8860 S0 F2 199.4895 14.8750[平面点位误差表]点名长轴短轴长轴点位备注(m) (m) 方位dms 中误差mS1 0.0016 0.0005 141.2648610.0017F2 0.0029 0.0011 66.3852940.0031S0 0.0040 0.0022 65.4117750.0046 [高程平差结果表]点号高差改正数(m) 改正后高差(m)高程中误差(m)平差后高程(m)备注GS05 0.0000 46.2850 已知点GS04 0.0240 -8.3300 0.0000 37.9550 已知点GS05 0.0000 46.2850 已知点S1 -0.01929.1478 0.0095 55.4328GS05 0.0000 46.2850 已知点F2 -0.0060 19.12050.0118 65.4055GS04 0.0000 37.9550 已知点S1 -0.0042 17.47780.0095 55.4328GS04 0.0000 37.9550 已知点GS05 0.0267 8.3300 0.0000 46.2850 已知点S1 0.0095 55.4328F2 -0.00989.9727 0.0118 65.4055S1 0.0095 55.4328GS05 -0.0273 -9.14780.0000 46.2850 已知点S1 0.0095 55.4328S0 -0.0102 -4.87920.0172 50.5536S1 0.0095 55.4328GS04 0.0010 -17.4778 0.0000 37.9550 已知点F2 0.0118 65.4055GS05 0.0090 -19.1205 0.0000 46.2850 已知点F2 0.0118 65.4055S0 -0.0169 -14.85190.0172 50.5536F2 0.0118 65.4055S1 -0.0307 -9.97270.0095 55.4328S0 0.0172 50.5536 S1 -0.00684.8792 0.0095 55.4328 S0 0.0172 50.5536F2 -0.0231 14.85190.0118 65.4055[平面点间误差表]点名点名MT(m) MD(m)D/MDT方位D距离(m)备注GS0 5 S1 0.00170.001624175141.26486139.3469GS0 5 F2 0.00310.00292709666.38529477.4969GS0 4 S1 0.00170.0010414218141.264861425.1885S1 F2 0.0035 0.00332841926.53255893.4623S1 GS05 0.00170.001624175141.26486139.3469S1 S0 0.0044 0.00402739455.310765109.6180S1 GS04 0.00170.0010414218141.264861425.1885F2 GS05 0.00310.00292709666.38529477.4969F2 S0 0.0050 0.00424704177.584164199.4927F2 S1 0.0035 0.00332841926.53255893.4623S0 S1 0.0044 0.00402739455.310765109.6180S0 F2 0.0050 0.00424704177.584164199.4927[控制点成果表]点名X(m) Y(m) H(m) 备注GS05 6467.4570 39942.479046.2850 已知点GS04 6459.9790 40389.676037.9550 已知点S1 6435.3349 39965.202355.4328F2 6435.8035 39871.741265.4055S0 6475.2492 40067.295250.5536。
控制网复测总结报告

九景衢铁路JQJXZQ-2标精密控制网复测总结报告编制:复核:审核:技术负责人:中铁二十五局集团有限公司九景衢铁路JQJXZQ-2标项目部2014年5月目录1 完成任务情况 (1)1.1 任务来源 (1)1.2 测区概况 (1)1.3 工作内容 (2)1.4 执行的技术依据及精密测量控制网复测精度指标 (2)1.4.1 执行的技术依据 (2)1.4.2 精密测量控制网复测精度指标 (2)1.5 施测单位 (3)1.6 完成工作的起止日期 (3)1.7 完成的工作量与相邻标段联测的桩点 (3)2 坐标系统及巳有资料利用情况 (5)2.1 坐标系统 (5)2.2 巳有资料利用情况 (5)3 复测方案执行情况 (5)3.1 仪器检定 (5)3.2 精密控制网复测 (5)3.3 GPS观测操作及手簿填写 (6)3.4 GPS网数据处理 (7)3.5 水准复测 (8)3.5.1 水准点的观测 (8)3.5.2 水准复测数据处理 (8)4 项目质量检查 (9)5 提交的成果资料 (9)6 附件 (9)附件1:CPI复测成果及比对表 (10)附件2:CPII复测成果及比对表 (13)附件3:三等水准复测成果及比对表 (20)附件4:水准网闭合差 (24)1 完成任务情况1.1 任务来源根据中铁二十五局九景衢铁路JQJXZQ-2标项目部对九景衢铁路JQJXZQ-2标测量工作的要求,对本标段的基础平面控制网(CPⅠ)、线路平面控制网(CPⅡ)及三等水准高程控制网进行复测工作。
1.2 测区概况新建九景衢铁路江西段JQJXZQ-2标。
起讫里程为DK15+700~DK66+100,正线长度50.4km。
本标段共有特大、大中桥梁28座19.207km,框架式小桥3座59.37m;隧道6座4.078km;盖板涵5座241.86横延米,框架涵120座2789.37横延米,倒虹吸6座156横延米;路基27.3km,挖方147.67万方,填方237.14万方;本标段设都昌、油墩街2个站。
(整理)导线测量平差教程—计算方案设置

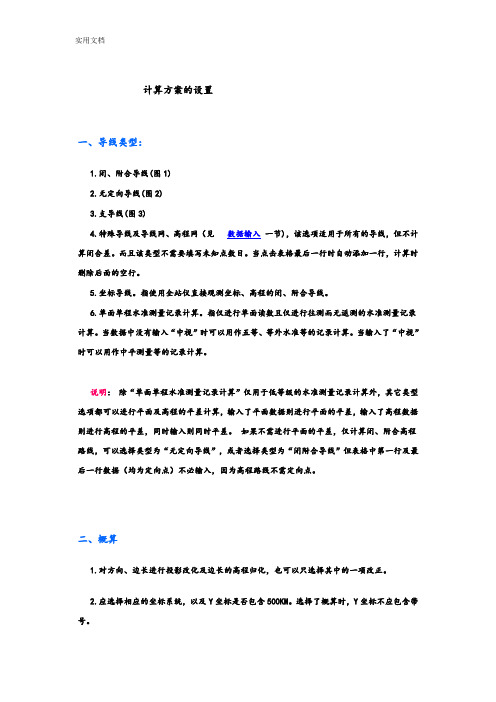
计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
水准 网 平 差 报 告
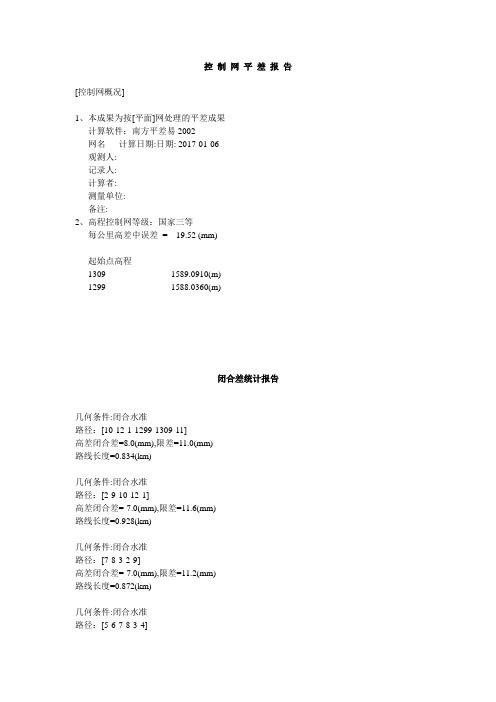
几何条件:闭合水准
路径:[10-12-1-1299-1309-11]
高差闭合差=8.0(mm),限差=11.0(mm)
路线长度=0.834(km)
几何条件:闭合水准
路径:[2-9-10-12-1]
高差闭合差=-7.0(mm),限差=11.6(mm)
路线长度=0.928(km)
几何条件:闭合水准
路径:[7-8-3-2-9]
高差闭合差=-7.0(mm),限差=11.2(mm)
路线长度=0.872(km)
几何条件:闭合水准
路径:[5-6-7-8-3-4]
高差闭合差=4.0(mm),限差=11.9(mm)
路线长度=0.980(km)
[方向观测成果表]
测站
照准
方向值(dms)
改正数(s)
平差后值(dms)
9
0.0065
1591.7864
7
0.0013
1.1653
0.0077
1592.9517
9
0.0065
1591.7864
2
-0.0046
-1.1426
0.0066
1590.6438
9
0.0065
1591.7864
10
0.0017
-1.0643
0.0052
1590.7221
10
0.0052
1590.7221
备注
1309
11
0.000000
1309
1299
172.054600
-619546.00
360.000000
1299
1309
0.000000
1299
控 制 网 平 差 报 告
所在院系:土木工程与建筑学院专业年级:测绘工程08级姓名:张光辉学号:0808030227指导老师:肖东升控制网平差报告[控制网概况]1、本成果为按[平面]网处理的平差成果计算软件:南方平差易2004网名计算日期:日期: 2011-02-25观测人:记录人:计算者:张光辉测量单位:备注:2、高程控制网等级:国家四等每公里高差中误差= 2.31 (mm)起始点高程A 12.0130(m)B 10.0130(m)闭合差统计报告控制网平差报告[控制网概况]1、本成果为按[平面]网处理的平差成果计算软件:南方平差易2004网名计算日期:日期: 2011-02-25观测人:记录人:计算者:张光辉测量单位:备注:2、高程控制网等级:国家四等每公里高差中误差= 2.22 (mm)起始点高程A 5.0160(m)B 6.0160(m)闭合差统计报告[控制网概况]1、本成果为按[平面]网处理的平差成果计算软件:南方平差易2004网名计算日期:日期: 2011-02-25观测人:记录人:计算者:张光辉测量单位:备注:2、高程控制网等级:国家四等每公里高差中误差= 7.70 (mm)起始点高程A 237.4830(m)闭合差统计报告控制网平差报告[控制网概况]1、本成果为按[平面]网处理的平差成果计算软件:南方平差易2004网名计算日期:日期: 2011-02-25观测人:记录人:计算者:张光辉测量单位:备注:2、平面控制网等级:国家四等,验前单位权中误差2.5(s)3、控制网数据统计结果[边长统计结果]总边长:16058.0800,平均边长:8029.0400,最小边长:6751.2400,最大边长:9306.8400[角度统计结果]控制网中最小角度:23.4516,最大角度:127.48413、控制网中最大误差情况最大点位误差= 0.0372 (m)最大点间误差= 0.0527 (m)最大边长比例误差= 128344平面网验后单位权中误差= 1.83 (s)闭合差统计报告[平面点间误差表]控制网平差报告[控制网概况]1、本成果为按[平面]网处理的平差成果计算软件:南方平差易2004网名计算日期:日期: 2011-02-25观测人:记录人:计算者:张光辉测量单位:备注:2、平面控制网等级:国家三等,验前单位权中误差2.5(s)3、控制网数据统计结果[边长统计结果]总边长:4682.5980,平均边长:520.2887,最小边长:306.0650,最大边长:667.5620[角度统计结果]控制网中最小角度:302.4215,最大角度:302.42153、控制网中最大误差情况最大点位误差= 0.0768 (m)最大点间误差= 0.1087 (m)最大边长比例误差= 5471平面网验后单位权中误差= 31.29 (s)闭合差统计报告[控制网概况]1、本成果为按[平面]网处理的平差成果计算软件:南方平差易2004网名计算日期:日期: 2011-02-25观测人:记录人:计算者:张光辉测量单位:备注:2、平面控制网等级:城市二级,验前单位权中误差2.5(s)3、控制网数据统计结果[边长统计结果]总边长:44436.4700,平均边长:11109.1175,最小边长:10156.1100,最大边长:12168.6000[角度统计结果]控制网中最小角度:22.0243,最大角度:120.08313、控制网中最大误差情况最大点位误差= 0.0289 (m)最大点间误差= 0.0519 (m)最大边长比例误差= 252492平面网验后单位权中误差= 1.11 (s)闭合差统计报告控制网平差报告[控制网概况]1、本成果为按[平面]网处理的平差成果计算软件:南方平差易2004网名计算日期:日期: 2011-02-25观测人:记录人:计算者:张光辉测量单位:备注:2、平面控制网等级:城市二级,验前单位权中误差2.5(s)3、控制网数据统计结果[边长统计结果]总边长:204082.3160,平均边长:6802.7439,最小边长:5187.3420,最大边长:8884.5870[角度统计结果]控制网中最小角度:302.4215,最大角度:302.42153、控制网中最大误差情况最大点位误差= 0.0358 (m)最大点间误差= 0.0556 (m)最大边长比例误差= 261617平面网验后单位权中误差= 2.13 (s)闭合差统计报告。
导线测量平差教程
计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
控制点坐标平差处理
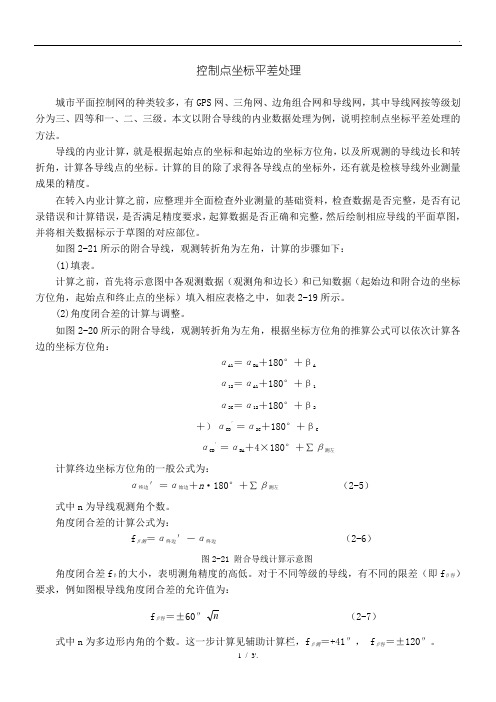
控制点坐标平差处理城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。
本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。
导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。
计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。
在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。
如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下:(1)填表。
计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。
(2)角度闭合差的计算与调整。
如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角:αA1=αBA+180°+βAα12=αA1+180°+β1α2C=α12+180°+β2+)αCD′=α2C+180°+βCαCD ′=αBA+4×180°+∑β测左计算终边坐标方位角的一般公式为:α终边′=α始边+n·180°+∑β测左(2-5)式中n为导线观测角个数。
角度闭合差的计算公式为:fβ测=α终边′-α终边(2-6)图2-21 附合导线计算示意图角度闭合差fβ的大小,表明测角精度的高低。
对于不同等级的导线,有不同的限差(即fβ容)要求,例如图根导线角度闭合差的允许值为:fβ容=±60″n(2-7)式中n为多边形内角的个数。
这一步计算见辅助计算栏,fβ测=+41″, fβ容=±120″。
平差课程设计报告

实验一一.设计原始资料水准网周密平差及精度评定示例。
如图所示水准网,有2个已知点,3个未知点,7个测段。
各已知数据及观测值见下表(1)已知点高程H1= H2=(2)高差观测值(m)高差观测值(m)端点高差观测值测段距离序号号1-3 11-4 22-3 32-4 43-4 53-5 65-2 7(3)求各待定点的高程;3-4点的高差中误差;3号点、4号点的高程中误差。
(提示,本网可采用以测段的高差为平差元素,采用间接平差法编写程序计算。
)二、水准网间接平差思路⑴.按照网型肯定已知水准点数H1 H2,未知水准点数u ,总点数n ,必要观测数t ,多余观测数r 。
⑵.肯定参数。
为平差后能直接求得待定点高程平差值,以3个待定点高程平差值为参数。
设3,4,5点的高程平差值别离为,, 。
⑶.列立条件方程.左侧为观测值(系数为1),右边为参数和常数项,并进一步改化成误差方程,最终写成矩阵形式。
取得系数矩阵A 和常数项L⑷.列立法方程,并解求法方程。
⑸.精度评定。
计算单位权中误差的估值:评定各待定点的高程中误差: 各待定点的精度即为: 评定高程平差值的精度: 四、平差程序设计思路1、 已知数据的输入需要输入的数据包括水准网中已知点数、未知点数和这些点的点号、已知高程和高差观测值、距离观测值等。
本程序采用文件方式进行输入,文件输入的格式如下: 第一行:已知点个数、未知点个数、观测值个数 第二行:点号 (已知点在前,为支点在后) 第三行:已知高程 (顺序与上一行的点号对应)第四行起:高差观测值,依照“起点点号,终点点号,高差观测值,距离观测值”的顺序输入。
2、 平差计算进程 (1)近似高程计算。
uc PV V r PV V T T -==20ˆσ120ˆˆ20ˆˆˆˆ-==bbx x x x N Q D σσjj X X j X Q ˆˆ0ˆˆσσ±=FN F F Q F Q BB T X X T h h 1ˆˆˆˆ-==X F hT ˆˆ=(2)列立观测值的误差方程。
导线测量平差教程

计算方案的设置一、导线类型:1、闭、附合导线(图1)2、无定向导线(图2)3、支导线(图3)4、特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5、坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6、单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明: 除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1、对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2、应选择相应的坐标系统,以及Y坐标就是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1、在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2、导线测量平差4、2及以前版本没有设置限差,打开4、2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长就是否反算1、近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2、严密平差:按最小二乘法原理平差。
3、《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
导线平面控制网平差报告
平面限制网平差报告限制网概况1本成果为按平面网处理的平差成果计算软件:南方平差易于网名苗圃大桥平面限制网计算日期:日期25观测人:赵XX记录人:闫XX计算者:谭XX测量单位:中铁十一局集团备
2、平面限制网等级:国家四等,验前单位权中误差2.5(s)
3、限制网数据统计结果边长统计结果总边长:1454.9470,平均边长:363.7367,最小边长:253.7630,最大边长:676.4880角度统计结果限制网中最小角度:144.0906,最大角度225
3、限制网中最大误差情况最大点位误差=0.0008(m)最大点间误差=0.0012(m)最大边长比例误差=464948平面网验后单位权中误差=0.66(s)闭合差统计报告几何条件:附合导线路径:BCP099W_T12CP0970.002(m),fd=0.002(m)s=778.459(m),k=1/357490,平均边长=259.486(m)方向观测成果表测站照准方向值(dms)改正数(s)平差后值(dms)备注CP097CP0960.000000CP097W_T11195.XXX.06195.102306CP098W_T10 000CP098BCP099193.XXX.33于225767W_T12W_T110.000000W_T12CP098144.090600-0.61144.09053 9距离观测成果表测站照准距离(m)改正数(m)平差后值(m)方位角(dms)CP097W_T11259.970XXXX0259.97于9.331496CP098BCP099676.48800.XXX.XXX.461499W_T11W_T12253.76 300.XXX.7631于561263W_T12CP098264.72400.XXX.XXX.051802平面
点位误差表点名长轴(m)短轴(m)长轴方位dms点位中误差m备注W_T110.00060.000585.XXX.0008W_T1060.000583.XXX.0008平面点间误差表点名点名MT(m)MD(m)D/MDT方位D距离(m)备注CP097W_T110.00080.000XXXX5785.531XXXX9259.9798W_T1080.000XX XX3883.414XXXX0264.7240W_T11CP0970.00080.000XXXX5785.531XXX X9259.97于T11W_T1080.000XXXX4890.001XXXX5253.7631W_T12W_T110.00080.0 00XXXX4890.001XXXX5253.7631W_T12CP0980.00080.000XXXX3883.41 4XXXX0264.7240限制点成果表点名_(m)Y(m)H(m)备注CP096XXXX8111.577XXXX0984.9350点CP097XXXX7489.870XXXX1158.7400点CP098XXXX6742.146XXXX1086.8150点BCP099XXXX6068.001XXXX1030.5511点W_T113XXXX7229.905XXXX1160.7629W_T123XXXX7003.674XXXX1045.
80。