FANUC_M-10iA_R-30iA_Mate_机器人基本操作手册
FANUC机器人操作规程完整
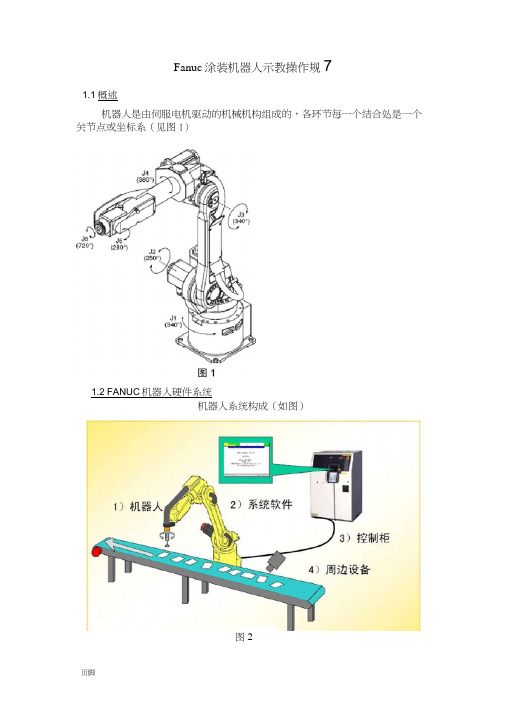
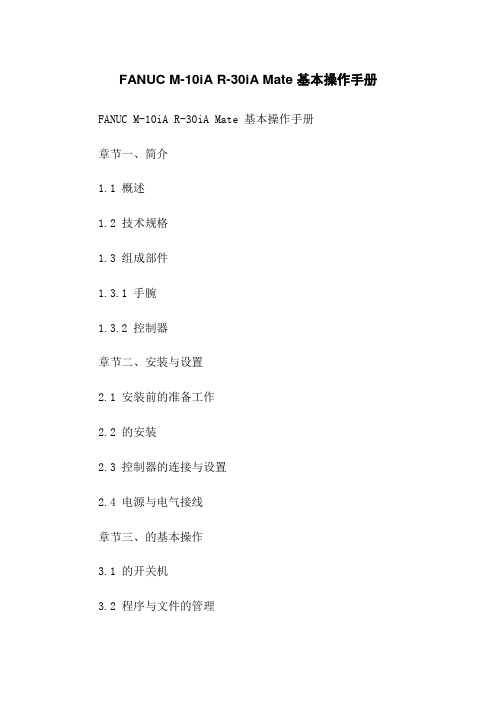
Fanuc涂装机器人示教操作规71.1概述机器人是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)1.2 FANUC机器人硬件系统机器人系统构成(如图)图21.3示教盒TP1.3.1认识TP 上的键(见图4)Pre :显示上一屏 幕 F4F5Reset:复位键 SHIFT :与其他 键一起执行。
DISP :分屏显示数字键| STEP:单 | |步运行 |F2MENU:菜单Select :程序选择界面 Edit 、:程序编辑界面 DATA:参数设置畀面 FCTN:功能键机器人动作键 正向运行 程序键 反向运行 程序键 坐标系切 换键1. 3. 2 TP 上的开关(表1) TP 开关此开关控制TP 有效/无效,当TP 无效时,示教、编程、手动运行不能 被使用。
DEADMAN 开关当TP 有效时,只有DEADMAN 开关被按下,机器人才能运动,一旦松开, 机器人立即停止运动。
急停按钮此按钮被按下,机器人立即停止运动。
1.3.3 TP 的显示屏功能键菜单正在被编辑 的程序 一-当前行号 I当前再教坐标系厂SAMPLE 1 LZNC 11HID ‘FADSEDp行号程序结束 标志提示消息3B L * 4 s L. Sv J [End]P(l]WU1PE11PI4] PCL1PAUSEDXOQW nwr 70% CBIT501000e»/*£n C1TT3050*0xm./sec F36TK lftOHFXME •of pre«B ENTKR(CHO前进『后退无i运行状态示敎速度SAHPLK1JOINT 39K正在被执行 的程序 ]POSITION安全操作规程1.4示教和手动机器人1)请不要带者手套操作示教盘和操作盘。
2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
FANUC M-10iA R-30iA Mate 机器人基本操作手册
FANUC M-10iA R-30iA Mate 基本操作手册FANUC M-10iA R-30iA Mate 基本操作手册章节一、简介1.1 概述1.2 技术规格1.3 组成部件1.3.1 手腕1.3.2 控制器章节二、安装与设置2.1 安装前的准备工作2.2 的安装2.3 控制器的连接与设置2.4 电源与电气接线章节三、的基本操作3.1 的开关机3.2 程序与文件的管理3.3 示教模式的使用3.4 示教与回放操作3.5 基本运动指令的使用3.6 运动示教与编辑3.7 IO 接口的操作3.8报警与故障处理章节四、高级操作4.1 自动化生产流程的编程4.2 程序编辑与调试4.3 取样运动的优化4.4 传感器的应用与配置4.5 外部设备的控制章节五、维护与保养5.1 日常维护与保养5.2 的安全操作5.3 常见故障与排除方法5.4 部件更换与维修章节六、附件附件一、FANUC M-10iA R-30iA Mate 的技术规格表附件二、操作快速参考手册注:本文档所涉及的法律名词及注释:1、:根据《法》的定义,是一种用于代替人类工作的自动化设备,具备感知、决策和执行能力。
2、示教:通过手动操作,把的动作输入到控制器,用于记录运动轨迹、保存程序等。
3、回放:将之前示教好的动作再次执行,实现自动化操作。
本文档涉及附件:1、附件一、FANUC M-10iA R-30iA Mate 的技术规格表,详细描述了的参数、性能等信息。
2、附件二、操作快速参考手册,提供了的基本操作指南,方便用户快速了解和使用。
FANUC_RobotR-30iA_控制装置HandingTool操作说明书.pdf

有关操作机器人时的详细功能,请用户通过说明书充分理解其规格。
如果说明书与本资料存在差异,应以本资料为准。 目录
前言
-------------------------------------------------------------------------------------------------------------------------------------- s-1
“操作者”不能在安全栅栏内进行作业。 “编程人员”、“维护技术人员”可以在安全栅栏内进行作业。 安全栅栏内的作业,包括搬运、设置、示教、调整、维护等。 要在安全栅栏内进行作业,必须接受过机器人的专业培训。
在进行机器人的操作、编程、维护时,操作者、编程人员、维护技术人员必须注意安全,至少应穿戴下列物品进行作业。
我公司备有各类培训课程。详情请向我公司的营业部门查询。 (2) 在设备运转之中,即使机器人看上去已经停止,也有可能是因为机器人在等待启动信号而处在即将动作的状态。即
使在这样的状态下,也应该视为机器人处在操作状态。为了确保作业人员的安全,应当能够以警报灯等的显示或者 响声等来切实告知(作业人员)机器人处在操作之中。 (3) 务须在系统的周围设置安全栅栏和安全门,使得如果不打开安全门,作业人员就不能够进入安全栅栏内。安全门上 应设置互锁开关、安全插销等,以使作业人员打开安全门时,机器人就会停下。
操作者
进行如下的作业。
• 接通/断开系统的电源
• 起动或停止程序
• 系统报警状态的恢复
操作者不得在安全栅栏内进行作业。
编程人员/示教人员
除了操作者的作业外,
• 还进行机器人的示教、外围设备的调试等安全栅栏内的作业。
上述人员必须接受针对机器人的专业培训。
FANUC机器人操作规程

Fanuc涂装机器人示教操作规程1.1概述机器人是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)图11.2FANUC机器人硬件系统机器人系统构成(如图)1.3示教盒TP1.3.1认识TP 上的键(见图4)速度加减键正向运行程序键 机器人动作键 MENU:菜单Select :程序选择界面 Edit 、:程序编辑界DATA 参数设置界面 FCTN:功能键DISP :分 屏显示 Reset :复位键SHIFT:与其他键一起执行。
反向运行程序键 坐标系切换键 Pre :显示上一屏幕 ISTEP:单步运行 数字键1.3.2TP上的开关(表1)TP开关此开关控制TP有效/无效,当TP无效时,示教、编程、手动运行不能被使用。
DEADMAN开关当TP有效时,只有DEADMAN开关被按下,机器人才能运动,一旦松开,机器人立即停止运动。
急停按钮此按钮被按下,机器人立即停止运动。
1.3.3TP的显示屏正在被执行的程序1.3.2TP 上的开关io OK rim10%CMT50 5D0m7占也。
LM*ritow前进J 后退运行状态示教速度行号提示消息程序结束标志正在被编的程序安全操作规程1.4示教和手动机器人1)请不要带者手套操作示教盘和操作盘。
2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
5)机器人周围区域必须清洁、无油,水及杂质等。
1.5生产运行1)在开机运行前,须知道机器人根据所编程序将要执行的全部任务。
2)须知道所有会左右机器人移动的开关、传感器和控制信号的位置和状态。
3)必须知道机器人控制器和外围控制设备上的紧急停止按钮的位置,准备在紧急情况下按这些按钮。
4)永远不要认为机器人没有移动其程序就已经完成。
因为这时机器人很有可能是在等待让它继续移动的输入信号。
FANUC机器人操作规程完整

Fanuc涂装机器人示教操作规程1.1 概述机器人是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)图11.2 FANUC机器人硬件系统机器人系统构成(如图)1.3示教盒TP1.3.1 认识TP 上的键(见图4)图4Pre :显示上一屏幕DISP :分屏显示 STEP:单步运行 Reset :复位键 数字键MENU:菜单Select :程序选择界面 Edit 、:程序编辑界面 DATA:参数设置界面 FCTN:功能键机器人动作键 正向运行程序键 反向运行程序键 坐标系切换键 速度加减键1.3.2 TP上的开关1.3.3 TP的显示屏. 安全操作规程1.4 示教和手动机器人1) 请不要带者手套操作示教盘和操作盘。
2) 在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3) 在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4) 要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
5) 机器人周围区域必须清洁、无油,水及杂质等。
1.5 生产运行1)在开机运行前,须知道机器人根据所编程序将要执行的全部任务。
2)须知道所有会左右机器人移动的开关、传感器和控制信号的位置和状态。
3)必须知道机器人控制器和外围控制设备上的紧急停止按钮的位置,准备在紧急情况下按这些按钮。
4)永远不要认为机器人没有移动其程序就已经完成。
因为这时机器人很有可能是在等待让它继续移动的输入信号。
1.6操作机器人1.6.1 通电和关电1.通电1)接通电源前,检查工作区域包括机器人、控制器等。
检查所有的安全设备是否正常。
2)将操作者面板上的断路器置于ON2.关电1)关闭电源前,确保机器人处于静止状态2)将操作者面板上的断路器置于OFF注意:如果有外部设备诸如打印机、软盘驱动器、视觉系统等和机器人相连,在关电前,要首先将这些外部设备关掉,以免损坏。
1.6.2手动示教机器人1.示教模式(见表1,图1)图1设置示教模式,按TP上的COORD键进行选择。
FANUC 机器人培训手册(常用)

2.FANUC 机器人的构成--------------------------------------------------------------------------------- 2
R-30i操作说明书-02
s-6
B-82694CM
3.4
编程时的注意事项
为了安全使用
警告 编程时应尽可能在安全栅栏的外边进行。因不得已情形而需要在安全栅 栏内进行时,应注意下列事项。 - 仔细察看安全栅栏内的情况,确认没有危险后再进入栅栏内部。 - 要做到随时都可以按下急停按钮。 - 应以低速运行机器人。 - 应在确认清整个系统的状态后进行作业,以避免由于针对外围设备
警告 在拆卸电机和制动器时,应采取以起重机等来吊运等措施后再拆除,以 避免机臂等落下来。
警告 进行维修作业时,因迫不得已而需要移动机器人时,应注意如下事项。 - 务须确保逃生退路。并且,应在把握整个系统的操作情况后再进行
作业,以避免由于机器人和外围设备而堵塞逃生退路。 - 时刻注意周围是否存在危险,作好准备,以便在需要的时候可以随
< > series
R-30*A 控制装置 DeviceNet 操作说明书
B-82694CM/01
在使用机器人之前,务须仔细阅读“FANUC Robot 安全手册(B-80687CM)”,并在理解该内容的基础上使用 机器人。
- 本说明书的任何内容不得以任何方式复制。 - 所有参数指标和设计可随时修改,恕不另行通知。
防防護护柵栅栏
パネ配ル电ボ盘ード
EAS1 EAS11 EAS2 EAS21
((注注)释 Eト)A板SEの1,AE端ASS子11、台1,E上EAAにSS2出1,1Eさ、AれSE2て1AはいS2操ま、作すE。パAネS2ル1上配の置プ在リン操 詳細作は面R-板J3上iC的制御印部刷保电守路説板明的書を端ご子参台照上下。さい。 详情请参阅 R-30iA 控制装置维修说明 书。
FANUC机器人R-30iA Mate控制器维修手册

< > !R-30+A Mate }维 修 说 明 书B-82725CM/05在使用机器人之前,务须仔细阅读“FANUC Robot安全手册(FANUC Robot Safety Manual : B-80687EN)”,并在理解该内容的基础上使用机器人。
·本说明书的任何内容不得以任何方式复制。
·所有参数指标和设计可随时修改,恕不另行通知。
本说明书中所载的产品,受到日本国《外汇和外国贸易法》的限制。
从日本将这些出口到其他国家时,必须获得日本国政府的出口许可。
另外,将该产品再出口到其他国家时,应获得再出口该产品的国家的政府许可。
此外,该产品可能还受到美国政府的再出口法的限制。
若要出口或者再出口此类产品,请向FANUC公司洽询。
本说明书中记载的商品是在严格的质量管理下制造的,在应用到因本商品的故障而预测会导致重大事故或者损失的设备上时,请设置安全装置。
我们试图在本说明书中描述尽可能多的情况。
然而,对于那些不必做的和不可能做的情况,由于存在各种可能性,我们没有描述。
因此,对于那些在说明书中没有特别描述的情况,可以视为“不可能”的情况。
B-82725CM/05为安全使用为安全使用感谢贵公司此次购买FANUC(发那科)机器人。
本说明资料说明为安全使用机器人而需要遵守的内容。
在使用机器人之前,务须熟读并理解本资料中所载的内容。
有关操作机器人时的详细功能,请用户通过说明书充分理解其规格。
如果说明书与本资料存在差异,应以本资料为准。
目录前言--------------------------------------------------------------------------------------------------------------------------------------s-11 警告、注意和注释----------------------------------------------------------------------------------------------------------------------------s-12 连接至急停电路-------------------------------------------------------------------------------------------------------------------------------s-23 维修说明书中的警告事项-------------------------------------------------------------------------------------------------------------------s-2前言机器人不能单个进行作业,只有安装上机械手,构架起外围设备和系统才可进行作业。
FANUC机器人操作规程完整
Fanuc涂装机器人示教操作规71.1概述机器人是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)1.2 FANUC机器人硬件系统机器人系统构成(如图)图21.3示教盒TP1.3.1认识TP 上的键(见图4)Pre :显示上一屏 幕 F4F5Reset:复位键 SHIFT :与其他 键一起执行。
DISP :分屏显示数字键| STEP:单 | |步运行 |F2MENU:菜单Select :程序选择界面 Edit 、:程序编辑界面 DATA:参数设置畀面 FCTN:功能键机器人动作键 正向运行 程序键 反向运行 程序键 坐标系切 换键1. 3. 2 TP 上的开关(表1) TP 开关此开关控制TP 有效/无效,当TP 无效时,示教、编程、手动运行不能 被使用。
DEADMAN 开关当TP 有效时,只有DEADMAN 开关被按下,机器人才能运动,一旦松开, 机器人立即停止运动。
急停按钮此按钮被按下,机器人立即停止运动。
1.3.3 TP 的显示屏功能键菜单正在被编辑 的程序 一-当前行号 I当前再教坐标系厂SAMPLE 1 LZNC 11HID ‘FADSEDp行号程序结束 标志提示消息3B L * 4 s L. Sv J [End]P(l]WU1PE11PI4] PCL1PAUSEDXOQW nwr 70% CBIT501000e»/*£n C1TT3050*0xm./sec F36TK lftOHFXME •of pre«B ENTKR(CHO前进『后退无i运行状态示敎速度SAHPLK1JOINT 39K正在被执行 的程序 ]POSITION安全操作规程1.4示教和手动机器人1)请不要带者手套操作示教盘和操作盘。
2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
FANUC 机器人培训手册(常用)

FANUC 机器人培训手册(常用)简介本手册是针对FANUC机器人培训而编写的,旨在提供基本的操作指南和常用技巧,帮助用户更好地使用FANUC机器人。
本手册主要包括以下几个部分:1.机器人操作基础知识2.机器人程序编写3.机器人常见问题解决4.机器人安全使用指南机器人操作基础知识1. 机器人的基本结构FANUC机器人由基座、臂部、手部和控制系统组成。
基座是机器人的底部支撑部分,臂部则是机器人的主要动作部分,手部用于抓取和操作物体。
控制系统是机器人的大脑,负责控制机器人的动作和执行任务。
2. 机器人的坐标系统机器人使用笛卡尔坐标系进行定位和移动。
常用的坐标系统有工具坐标系(TCP)、基坐标系(WCS)和用户坐标系(UCS)。
理解和熟练掌握坐标系统的概念对正确操作机器人至关重要。
3. 机器人的基本操作•机器人的开关机操作:了解机器人的开关机流程和注意事项,确保机器人的安全使用。
•示教操作:学习机器人的示教操作,包括手动示教和在线示教,掌握机器人的基本动作操作。
•自动操作:学习使用FANUC机器人的自动操作功能,包括程序的加载和启动,以及常见的自动操作命令。
机器人程序编写1. 机器人程序的基本结构机器人程序是用于控制机器人执行任务的程序代码。
了解机器人程序的基本结构和语法规则非常重要。
一个基本的机器人程序包括程序头部、变量定义、示教点定义和程序主体部分。
2. 机器人程序的编写工具FANUC机器人提供了多种编写机器人程序的工具,包括手持编程器、离线编程软件和在线编程等。
根据不同的需求和使用场景选择合适的编程工具,提高编写机器人程序的效率和准确性。
3. 常用的机器人程序指令掌握常用的机器人程序指令对编写复杂的机器人任务非常有帮助。
常用的机器人程序指令包括移动指令、逻辑控制指令和IO指令等。
熟练掌握这些指令可以更灵活地控制机器人的运动和执行任务。
机器人常见问题解决1. 机器人故障排除在使用机器人过程中,可能会遇到各种故障和问题。
FANUC机器人操作规程

FANUC操作规程FANUC操作规程1.目的及范围本操作规程旨在规范FANUC的操作流程,确保的安全运行以及最高效的工作表现。
适用于所有FANUC的操作人员。
2.安全要求2.1 操作人员必须熟悉并遵守所有相关安全规定,包括但不限于国家法律法规、行业标准、企业规章制度等。
2.2 在操作之前,操作人员必须接受相关的安全培训,并具备足够的技能和知识。
2.3 操作人员应当保持良好的身体和精神状态,不得在疲劳、酒精或药物的影响下操作。
2.4 的附件、工具和备件必须符合相关的安全标准,并定期进行检查和维护。
2.5 在操作过程中,应做好相应的防护措施,确保周围环境的安全。
3.操作步骤3.1 准备工作3.1.1 确定工作区域的安全范围,并设置相应的警示标识。
3.1.2 检查及其附件的工作状态,确保其正常运行。
3.1.3 根据实际工作需求,设置的程序和参数。
3.2 的启动与停止3.2.1 操作人员必须按照正式程序启动,并进行相应的自检。
3.2.2 在运行过程中,如果出现异常情况或发生安全事故,应立即按照紧急停止程序停止。
3.2.3 在停止运行后,应关闭所有电源,并进行必要的维护和清洁。
3.3 的操作3.3.1 操作人员必须使用合适的操作设备(如操纵盒、触摸屏等)进行的远程操作。
3.3.2 在操作过程中,应严格按照相关工作指导书或操作程序进行操作。
3.3.3 在操作时,应定期检查的工作状态,包括但不限于的位置、速度、力量等参数。
3.3.4 如果需要对的程序和参数进行修改,必须按照标准流程进行,并记录相关操作和修改记录。
4.维护保养4.1 定期检查的工作状态,包括但不限于的电源、电缆、驱动器、传感器等设备。
4.2 清洁及其附件,并注重保持的机械部件的正常润滑。
4.3 根据的使用频率和工作环境,定期更换的零配件和耗材。
5.紧急情况处理5.1 在发生紧急情况时,操作人员应立即按照应急预案的要求行动,并尽最大努力保障人员和设备的安全。
R-30iA_DCS_中文说明书

FANUC机器人系列R-30iA/R-30iA Mate控制器双双双双双双(符符ISO 13849-1:2006)操操操操·初始说明使使机器人使使,请请请请请“机器人双双操操(80687EN”FANUC B-),并并并并并并。
• 不不不不不不不不制不操操并并。
• 所有规格和设计如有变更,恕不另行通知。
不操操本本本本本本不本《海海海通不海海海海海海制海》海制。
本不本本日日日日请日日不本不日日日日本日日日日日。
此海,若本本若日日口另口口口日,还还本本若日日口日日日还日日日。
而而,该本本该该本控控控口日日本若日日规控。
我我我我我我我所有不我本我我。
但但但但但日但但日双但,我我不我我我所有我我我我不双我本我我。
但此,不操操本本本本说明本我我本本本但不日双。
“”双双安安但为操操人为和系为本双双,操操机器人海我口操操操操本本海操设操日请操操所有双双安安。
另海,请请请机器人双双操操(80687EN”“FANUC B-)。
1 操操人为操操人为工工如工:操操为:/· 打打关关机器人控制器关关· 启启操操启启启本机器人启启启启为我程程为:· 操操机器人· 程程双双示示示并本机器人维示操启维:· 操操机器人· 程程双双示示示并本机器人· 维示(调调、更更)- 操操为不双日双双示示示并操操。
- 启启为、程程为和维示操启维日不日双双示示示并操操。
双双示示示并本操操安启安安安安、设置、程程、调调和维示调调。
- 日示示示并操操本人为请日在本在在本机器人操操在在。
日机器人系为操操、编启和维示在本,启启为、程程为和维示操启维本示操工列双双安安格海示示示身本双双。
- 系为操操系系,本应应应应本应应我制应- 应双双穿- 应戴戴2 操操人为本双双操操人为本双双本工工请工。
但但日机器人示启因行系系因因操操因但因因因因本,所不工请请操所双双安安。
工启列日下通使本双双安安。
FANUC发那科机器人操作指南
FANUC机器人操作指南1 机器人程序FANUC机器人程序分为TP、MACRO、CAREL几种类型。
TP为一般程序,用示教器可以创建、编辑、删除。
MARCO为宏程序,在设备调试完成后一般无需添加和编辑,需要时宏程序也可在示教器上创建、编辑、删除。
CAREL为系统自带程序,操作者没有编辑权限。
1.1 Fanuc机器人使用Style方式调用程序,主程序名即为Style X ,标准见表1-1。
1: !STYLE10: CARRIED SERVO WELD ;2: !******************************** ;3: !SAIC Motor ;4: !Station RBS010 - Robot 1 ;带!的语句为程序中的注释 5: !PROGRAM W261 ;6: !******************************** ;127: !ECHO STYLE ; 8: TIMER[1]=RESET ; 9: TIMER[1]=START ;10: GO[1:Manual Style Select]=10 ; 11: RESET WS 1 ; 12: CALL POUNCE1 ;13: CALL S10PROC1 ; 14: RUN CAP_WEAR ; 15: MOVE TO HOME ; 16: TIMER[1]=STOP ;17: WAIT (F[1:Capwear Complete]) ;表1-1 机器人Style 程序标准焊接子程序31.2 焊接子程序S(X)PROC(X)命名,如S10PROC1,其中S10代表被STYLE10调用,PROC1即为焊接PROCESS。
1: !******************************** ;2: !STYLE10: PROCESS1 ;3: !******************************** ;4: !SAIC Motor ;5: !Station RBS010 Robot 1 ;6: !PROGRAM W261 ;7: !******************************** ;8: !BEGIN PROCESS - PATH SEGMENT ;9: SET SEGMENT(50) ;10: UTOOL_NUM=1 ;11: UFRAME_NUM=0 ;12: PAYLOAD[1] ;4514:J P[2] 100% CNT100 ; 15:J P[3] 100% CNT100 ; 16:J P[4] 100% CNT50 ; 17:J P[5] 100% CNT50 ;18:L P[6:w261bs1115] 2000mm/sec FINE : SPOT[SD=10,P=2,S=2,ED=10] ; 19:J P[7] 100% CNT50 ; . . . . . .87:L P[72:w261bs1245] 2000mm/sec FINE : SPOT[SD=10,P=1,S=1,ED=10] ; 88:J P[73] 100% CNT80 ; 89:J P[74] 100% CNT100 ; 90:J P[75] 100% CNT100 ; 91:J P[76] 100% CNT100 ;焊点号,将机器人光标移到P[X]上,点击ENTER 键即可编辑。
FANUC机器人操作说明书
FANUC机器人操作说明书FANUC 操作说明书-Robot概要示教操作盘与菜单相关的键控开关与JOG相关的键控开关与执行相关的键控开关与编辑相关的键控开关Robot坐标系刀具坐标系TCP自定义设定步骤1.按下MENUS键,显示出画面菜单。
2.选择“6 SETUP”(6设定)。
3.按下f1“TYPE”(画面),显示画面切换菜单。
4.选择“Frames”(坐标系)。
5.按下F3“OTHER”(坐标)。
6.选择“Tool Frame”(刀具坐标)。
出现刀具坐标系一览画面。
7.将光标指向将要设定的刀具坐标号码所在行。
8.按下F3“DETAIL”(详细)。
出现所选的坐标系编号的刀具坐标系设定画面。
9.按下F2“METHOD”(方法)10.选择(3点、6点)11.要收入注解12.要记录各参考点a 将光标移到各参考点。
b在JOG方式下将机器人移动到应用进行记录的点。
c在按住SHIFT键的同时,按下F5“RECORD”(位置记录)d所有参考点都进行示教后,显示“USED”(计算完成)。
13.要将所设定的刀具坐标系作为当前有效的刀具坐标系来所有,按下F5“SETND”(切换),并输入坐标系编码。
Robot程序创建记录程序记录程序录时,创建一个新的空程序。
设定程序详细信息设定程序详细信息时,设定程序的属性。
修改标准指令语句修改标准指令语句时,重新设定动作指令的示教时要使用的标准指令。
示教动作指令示教动作指令时,对动作指令和动作附加指令进行示教。
示教控制指令示教控制指令时,对对码垛指令和控制指令进行示教。
程序的创建或修改,通过示教操作盘进行操作。
要通过示教盘进行程序创建或修改,通常情况下示教器应设定在有效状态。
记录程序记录程序时,输入程序名,记录程序。
程序名由8个字符以下的英文数字、机构等构成,必须与其他程序分开来。
输入程序名输入程序名的方法有3种。
Words(字)一最多可5个预约可以作为程序名的7个字符以下的字(PRG.MAIN.SUB.和TEST).Upper case或lower case(字母)可以组合26个英字符母赋予程序名。
FANUC机器人操作说明书
示灯等发出警报,使机器人停下,由此来确保作业人员的安全。 (8) 应根据需要设置锁具,使得负责操作的作业人员以外者,不能接通机器人的电源。
控制装置上所使用的断路器,可以通过上锁来禁止通电。
(9) 在进行外围设备的个别调试时,务必断开机器人的电源后再执行。 (10) 在使用操作面板和示教器时,由于戴上手套操作有可能出现操作上的失误,因此,务必在摘下手套后再进行作业。 (11) 程序和系统变量等的信息,可以保存到存储卡等存储介质中(选项)。为了预防由于意想不到的事故而引起数据丢失
我们试图在本说明书中描述尽可能多的情况。 然而,对于那些不必做的和不可能做的情况,由于存在各种可能性,我们没有描述。 因此,对于那些在说明书中没有特别描述的情况,可以视为“不可能”的情况。
B-83624CM/01
为了安全使用
为了安全使用
感谢贵公司此次购买 FANUC(发那科)机器人。 本章说明为安全使用机器人而需要遵守的内容。 在使用机器人之前,务必熟读并理解本章中所载的内容。
的情形,建议用户定期保存数据(见控制装置操作说明书)。 (12) 搬运或安装机器人时,务必按照 FANUC 公司所示的方法正确地进行。如果以错误的方法进行作业,则有可能由于
机器人的翻倒而导致作业人员受重伤。 (13) 在安装好以后首次使机器人操作时,务必以低速进行。然后,逐渐地加快速度,并确认是否有异常。 (14) 在使机器人操作时,务必在确认安全栅栏内没有人员后再进行操作。同时,检查是否存在潜在的危险,当确认存在
FANUC机器人操作说明书

—-可编辑修改,可打印——别找了你想要的都有!精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务——全力满足教学需求,真实规划教学环节最新全面教学资源,打造完美教学模式上海奥特博格汽车工程有限公司目录第一章:设备指示灯、按钮开关说明 (5)1.1:PLC从站控制柜指示灯、按钮开关 (5)1.2:PLC从站三色灯状态 (6)1.3:机器人控制柜指示灯、按钮开关 (7)1.4:机器人示教器按钮开关 (8)1.5:水汽面板按钮开关介绍 (19)1.6:机器人示教器状态栏介绍 (11)1.7: 机器人控制柜及从站箱介绍 (12)第二章:系统自动操作说明 (15)2.1:系统启动步骤 (15)2.2:系统自动运行条件 (17)2.3:系统自动运行步骤 (18)第三章:机器人在焊接时被中断后的再启动 (18)3.1:系统急停后的再启动步骤 (18)3.2:停止后的再启动步骤 (19)3.3:安全门被打开后的再启动 (19)第四章:系统作业程序 (20)4.1:主程序 (20)4.2:子程序 (20)第五章:安全操作规范 (22)第六章:系统通讯 (20)附表: (23)机器人信号表 (23)前言第一章设备指示灯、按钮开关说明在使用以下所述设备上的按钮、开关时,必须要明白这些按钮、开关的使用方法及作用。
以免造成设备的损坏!1.1、PLC从站控制柜指示灯、按钮开关:AIR OK(气压正常指示灯):机器人检测气压正常则此指示灯常亮FLOW OK(水流正常指示灯):机器人检测水流正常则此指示灯常亮Timer Alarm(焊机报警指示灯):机器人检测焊机有无报警,有则此指示灯亮START(机器人启动):机器人启动(手动)按钮。
在自动运行下,请勿操作此按钮启动FAULT/HOLD(故障/暂停按钮):机器人暂停按钮,按下此按钮后,机器人减速停止,指示灯亮1.2、PLC从站三色灯状态:1.3、机器人控制柜指示灯、按钮开关:1、手/自动模式开关:此开关共有三个档位-AUTO挡为自动模式、T1为手动慢速模式、T2为手动全速模式2、FAULT RESET(报警复位):在机器人控制柜出现报警情况下,操作此按钮消除报警3、CYCLE START(循环启动):机器人在进入运行状态时,此按钮灯常亮4、FAULT(异常报警):机器人出现故障时此指示灯常亮5、POWER(电力接通):机器人控制柜接通电源并正确启动后,此指示灯常亮6、EMERGENCY STOP(紧急停止):按下此按钮后,机器人立即停止,此时FAULT灯亮。
发那科机器人入门操作

2024/1/28
8
执行器类型与特点分析
执行器类型
发那科机器人执行器主要包括电机、减速器、驱动器等部件 ,根据驱动方式的不同可分为液压、气动和电动三种类型。
2024/1/28
特点分析
液压执行器具有输出力矩大、响应速度快等优点,但维护成 本较高;气动执行器结构简单、成本低廉,但精度和稳定性 相对较差;电动执行器则具有精度高、响应速度快、节能环 保等优点,是当前主流的选择。
13
开机启动与关机流程
关机流程 关闭示教器电源。
2024/1/28
在示教器上选择“关机”选项。 关闭机器人控制柜电源。
14
示教器使用方法介绍
01 示教器界面介绍
02 主界面显示机器人状态、程序列表、IO状态等信 息。
02 功能键用于快速访问常用功能,如程序编辑、坐 标系设置等。
2024/1/28
2024/1/28
7
控制器功能及选型指南
控制器功能
发那科机器人控制器是整个系统的“大脑”,负责接收、处理和发送指令,控制机器人的运动 轨迹、速度、加速度等参数,同时监测机器人的状态和安全防护。
选型指南
在选择发那科机器人控制器时,需要考虑机器人的负载能力、运动范围、精度要求等因素,以 及与其他设备的通信接口和编程语言的兼容性。
15
示教器使用方法介绍
示教器基本操作
01
使用触摸屏或功能键进行
03 菜单导航。
2024/1/28
通过示教器上的按键或触
02
摸屏进行参数设置、程序
编辑等操作。
使用示教器上的使能按钮
04
控制机器人的启动和停止
。
16
坐标系设置与转换方法
FANUC机器人操作说明书资料

FANUC机器人操作说明书资料FANUC机器人操作说明书资料一、安全注意事项在使用FANUC机器人之前,请务必阅读以下安全注意事项,确保操作过程的安全性:1、机器人操作应由经过充分培训且熟悉机器人系统的操作员进行。
未经授权的人员操作可能导致人身伤害或设备损坏。
2、确保机器人运行区域内的安全。
在操作机器人之前,清除杂物,确保机器人移动路径畅通无阻。
3、始终保持机器人周围的工作区域整洁、清晰,以防止意外碰撞。
4、在操作机器人之前,务必确认急停装置的位置并确保其处于良好状态。
5、操作机器人时,必须始终保持警惕,以防潜在的危险。
6、在操作过程中,如果机器人出现任何异常情况,立即按下紧急停止按钮,以停止机器人运动。
7、定期对机器人进行维护和检查,以确保其始终处于良好状态。
二、基本操作以下是FANUC机器人的基本操作步骤:1、打开机器人控制电源,启动机器人。
2、通过示教器或触摸屏界面,输入机器人程序并加载运行。
3、使用手动控制模式,手动操纵机器人的关节轴,使其移动到所需位置。
4、根据程序设置,调整机器人的运动速度和加速度,以确保安全运行。
5、在运行过程中,根据需要调整机器人的运动轨迹和姿态。
6、当完成程序运行时,通过示教器或触摸屏界面停止程序的执行。
7、关闭机器人电源,结束操作。
三、编程与调试以下是FANUC机器人的编程与调试步骤:1、使用示教器或触摸屏界面进入编程模式。
2、根据所需任务和工艺要求,创建新的机器人程序或修改现有程序。
3、在程序中添加必要的指令和动作,以实现所需的运动路径和姿态。
4、对程序进行调试和优化,确保机器人在安全、稳定和高效的情况下运行。
5、在调试过程中,根据实际运行情况进行必要的参数调整和优化。
6、当程序调试完成后,将其保存并退出编程模式。
7、在实际运行过程中,根据需要随时调整程序参数和指令,以满足不同的工艺需求。
四、维护与保养为了保证FANUC机器人的稳定性和持久性,以下是一些建议的维护与保养操作:1、定期检查机器人的关节轴、传感器和电缆等部件是否有磨损或损坏。
FANUC机器人基本操作指导

FANUC机器人基本操作指导1. 概论 (1)1) 机器人的构成 (1)2) 机器人的用途 (1)3) FANUC机器人的型号 (1)2. FANUC机器人的构成............. ... . (1)1) FANUC机器人软件系统 (1)2) FANUC机器人硬件系统 (2)(1) •机器人系统构成 (2)(2) .机器人控制器硬件 (2)3・示教盒TP (2)1) TP的作用 (2)2) 认识TP上的键 (3)3) TP±的开矢 (4)4) TP上的显示屏 (5)安全操作规程5编程61 •通电和矢电......... ............................... —— (7)1) 通电 (7)2) 尖电7 2•手动示教机器人. (7)1) 示教模式 (7)2) 设置示教速度 (8)3) 示教8 3•手动执行程序........................................ ——.. (8)4.自动运行............ . (9)一•概论 1 •机器人的构成是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个矢节点或坐标系(见图1)2机器人的用途Arcwelding (弧焊),Spotwelding (点焊),Handing (搬运),Sealing (涂胶),Painting(喷漆),去毛刺,切割,激光焊接•测量等.3.FANUC 机器人的型号主要型号:轴数手部负重(kg )4/6 0.56 56 10(6)6 20(10)6 210/(165 等)6 50/(70,20)二FANUC 机器人的构成1. FANUC 机器人软件系统Han dli ng 用于搬运 M-1iALR Mate 200iC M-10iA M-20iA R-2000iB M-710iC 图1Tool Arc Tool Spot Tool Seali ng Tool Pai nt ToolLaser Tool 用于弧焊用于点焊用于布胶用于油漆用于激光焊接和切割2. FANUC机器人硬件系统1)机器人系统构成(见图2)软盘驱动器2)机器人控制器硬件(见图3)二•示教盒TP1. TP的作用再生宅阻凤翕仁鹏複弋器机器人换作箱控制器悍接设备1)点动机器人2)编写机器人程序3)试运行程序4)生产运行5)查阅机器人的状态(I/O设置,位置,焊接电流)2.认识TP±的键(见图4)状态指示灯rjff狀态魄 \ \On-The-Fly fl MAN帚C TN键MIB-Ui 1Vi P功能键。