金属带式汽车无级变速器传动机构设计
变速器设计(详细过程完整版).
黑豹HB1027变速器设计论文摘要变速器是汽车传动系中最主要的部件之一。
其设计任务是设计一台用于微型商用车上的手动变速器。
采用中间轴式变速器设计方案,其有两个突出优点:一是其直接挡传动效率高,磨损及噪声小;二是在齿轮中心距较小的情况下任然可以获得较大的一档传动比。
设计中根据汽车的外形、轮距、轴距、车辆重量、满载重量以及最高车速等参数结合该汽车的发动机型号可以得出发动机的最大功率、最大扭矩、排量等重要参数,再结合某些轿车的基本参数选择适当的主减速比。
根据上述参数,再结合汽车设计、汽车理论、机械设计等相关知识,计算出相关的变速器参数并论证设计的合理性。
设计中给出了机械式变速器设计方案,经过严谨设计过程完成了一款手动变速器设计,并经过校验和catia有限元优化,证明设计的变速器能够符合现实功用要求,设计方案具有比较强的可借鉴性。
关键词汽车工程;变速器;设计;手动;(版权所有,翻版不究)- I -AbstractGearbox is the one main component of the vehicle transmission.The duty of this design is to design a manual transmission used in the Tiny gears, it is the countershaft-type transmission gearbox.This transmission has two prominent merits: firstly, the transmission efficiency of the direct drives keep high ,the attrition and the noise are also slightest;Secondly ,it is allowed to obtain in the bigger gear ratio of the first gear when the center distance in smaller.According to the contour, track, wheel base, the vehicles weight, the all-up weight as well as the highest speed and so on, union the engine model we can obtain the important parameters of the max power, the max torque, the displacement and so on. According to the basic parameters of the certain saloon, choose the suitable final drive ratio. According to the above parameters, combining the knowledge of automobile design, automobile theory , machine design and so on, calculate the correlated parameters of the gearbox and proof the rationality of the design.The design gives a plan of the mechanical gearbox and achieves a kind of mechanical gearbox after rigorous design.The design has passed calibration and Finite element optimization.It has proved to be fit for function and use for reference perfectly.Key Words Automotive engineering,Transmission,Design,Manual- II -目录摘要 (I)Abstract.......................................................... I I 第1章绪论 . (1)1.1本课题研究的目的和意义 (1)1.2 本课题研究现状和发展 (1)第2章机械式变速器设计 (3)2.1 变速器设计基本方案 (3)2.1.1变速器传动机构布置方案 (3)2.1.2 变速器主要参数选择 (3)2.2齿轮设计计算 (7)2.2.1各挡齿轮齿数的分配 (7)2.2.2齿轮强度校核 (10)2.3 轴设计计算 (19)2.3.1轴的工艺要求 (19)2.3.2 轴的校核计算 (19)2.4 同步器及操纵机构设计 (29)2.4.1同步器的设计 (29)2.4.2变速器的操纵机构 (31)2.5 轴承及平键的校核 (32)2.5.1 轴承选择及校核 (32)2.5.2 平键选择及强度计算 (34)2.6 变速器箱体设计 (34)- III -2.6.1 箱体材料与毛坯种类 (34)2.6.2 箱体的主要结构尺寸的计算 (35)2.7 本章小结 (35)第3章有限元优化分析 (36)3.1 齿轮catia有限元分析 (36)3.1.1 倒档主动直齿轮catia有限元分析 (36)3.1.2 一档从动齿轮catia有限元分析 (37)3.2 变速器轴catia有限元分析 (37)3.2.1 中间轴catia有限元分析 (37)3.2.2 第二轴catia有限元分析 (38)3.3 本章小结 (38)结论 (39)参考文献 (40)致谢 (41)- IV -哈尔滨工业大学本科毕业论文(设计)第1章绪论1.1本课题研究的目的和意义随着汽车工业的迅猛发展,车型的多样化、个性化已经成为汽车发展的趋势。
汽车变速器之手动变速器(MT),自动变速器(AT),手自一体变速器,无级变速器(CVT)

一、什么是CVT?CVT即无段变速传动,其英文全称Continuouslv VariableTransmission,简称CVT。
发明这种变速传动机构的是荷兰人,有其装置的变速器也称为无段变速箱或者无级变速器。
这种变速器和普通自动变速器的最大区别是它省去了复杂而又笨重的齿轮组合变速传动,而只用了两组带轮进行变速传动。
通过改变驱动轮与从动轮传动带的接触半径进行变速,其设计构思十分巧妙。
由于CVT可以实现传动比的连续改变,从而得到传动系与发动机工况的最佳匹配,提高整车的燃油经济性和动力性,改善驾驶员的操纵方便性和乘员的乘坐舒适性,所以它是理想的汽车传动装置。
无段变速箱轿车一样有自己的档位,停车档P、倒车档R、空档N、前进档D等,只是汽车前进自动换档时十分平稳,没有突跳的感觉。
汽车行驶的速度是不断变化的,这就要求汽车的变速器的变速比要尽量多,这就是无级变速(Continuously Variable Transmission简称"CVT") 。
尽管传统的齿轮变速箱并不理想,但其以结构简单、效率高、功率大三大显着优点依然占领着汽车变速箱的主流地位。
在跨越了三个世纪的一百多年后的今天,汽车还没有使用上满意的无级变速箱。
这是汽车的无奈和缺憾。
但是,人们始终没有放弃寻找实现理想汽车变速器的努力,各大汽车厂商对无级变速器(CVT)表现了极大的热情,极度重视CVT在汽车领域的实用化进程。
这是世界范围尚未根本解决的难题,也是汽车变速器的研究的终极目标。
围绕汽车变速箱五个研究方向,各国汽车变速器专家展开了激烈的角逐。
1.摩擦传动CVT金属带式无级变速箱(VDT-CVT)的传动功率已能达到轿车实用的要求,装备金属带式无级变速箱的轿车已达100多万辆。
据报道:大排量6缸内燃机(2.8L)的奥迪A6轿车上装备的金属带式无级变速箱Multitronic CVT ,能传动142kw (193bhp)功率,280Nm扭矩。
无极变速原理
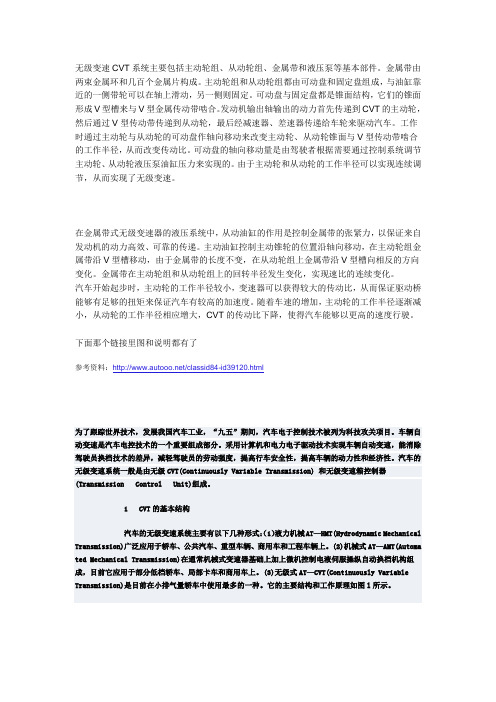
无级变速CVT系统主要包括主动轮组、从动轮组、金属带和液压泵等基本部件。
金属带由两束金属环和几百个金属片构成。
主动轮组和从动轮组都由可动盘和固定盘组成,与油缸靠近的一侧带轮可以在轴上滑动,另一侧则固定。
可动盘与固定盘都是锥面结构,它们的锥面形成V型槽来与V型金属传动带啮合。
发动机输出轴输出的动力首先传递到CVT的主动轮,然后通过V型传动带传递到从动轮,最后经减速器、差速器传递给车轮来驱动汽车。
工作时通过主动轮与从动轮的可动盘作轴向移动来改变主动轮、从动轮锥面与V型传动带啮合的工作半径,从而改变传动比。
可动盘的轴向移动量是由驾驶者根据需要通过控制系统调节主动轮、从动轮液压泵油缸压力来实现的。
由于主动轮和从动轮的工作半径可以实现连续调节,从而实现了无级变速。
在金属带式无级变速器的液压系统中,从动油缸的作用是控制金属带的张紧力,以保证来自发动机的动力高效、可靠的传递。
主动油缸控制主动锥轮的位置沿轴向移动,在主动轮组金属带沿V型槽移动,由于金属带的长度不变,在从动轮组上金属带沿V型槽向相反的方向变化。
金属带在主动轮组和从动轮组上的回转半径发生变化,实现速比的连续变化。
汽车开始起步时,主动轮的工作半径较小,变速器可以获得较大的传动比,从而保证驱动桥能够有足够的扭矩来保证汽车有较高的加速度。
随着车速的增加,主动轮的工作半径逐渐减小,从动轮的工作半径相应增大,CVT的传动比下降,使得汽车能够以更高的速度行驶。
下面那个链接里图和说明都有了参考资料:/classid84-id39120.html为了跟踪世界技术,发展我国汽车工业,“九五”期间,汽车电于控制技术被列为科技攻关项目。
车辆自动变速是汽车电控技术的一个重要组成部分。
采用计算机和电力电子驱动技术实现车辆自动变速,能消除驾驶员换档技术的差异,减轻驾驶员的劳动强度,提高行车安全性,提高车辆的动力性和经济性。
汽车的无级变速系统一般是由无级CVT(Continuously Variable Transmission) 和无级变速箱控制器(Transmission Control Unit)组成。
纽芬奇NuVinci无级变速星轮传动装置(CVP)

邯郸学院本科短学期报告题目纽芬奇NuVinci无级变速星轮传动装置指导教师韩翔宇年级2013 级专业物流工程班级 2012班物流工程本科班成员20130408101035崔璐20130408101022赵磊20130408101041赵煦20130408101045王晨辉20130408101054梁海艳20130408101025姜振晨邯郸学院信息工程学院目录1.前言 (1)2.无极变速器的发展史 (1)3. 无极变速器的基本结构及工作原理 (3)3.1无极变速器的基本结构 (3)3.2 无极变速器的工作原理 (3)4.无级变速行星传动装置的特点 (6)4.1 NuVinci无级变速行星传动装置 (6)4.2利用滚珠轴承在一定范围内实现连续不间断的速度调整 (6)4.3纽芬奇NuVinci无级变速星轮传动装置(CVP)优点 (7)5.无极变速器的发展前景 (7)6.小结 (8)1.前言CVT即无段变速传动,其英文全称Continuouslv Variable Transmission,简称CVT。
发明这种变速传动机构的是荷兰人,有其装置的变速器也称为无段变速箱或者无级变速器。
这种变速器和普通自动变速器的最大区别是它省去了复杂而又笨重的齿轮组合变速传动,而只用了两组带轮进行变速传动。
通过改变驱动轮与从动轮传动带的接触半径进行变速,其设计构思十分巧妙。
无段变速箱轿车一样有自己的档位,停车档P、倒车档R、空档N、前进档D等,只是汽车前进自动换档时十分平稳,没有突跳的感觉。
目前国内市场上采用了CVT技术的只有奥迪、飞度、派力奥(西耶那、周末风)、和旗云4款车型。
CVT 系统结构简单,零部件数目比AT(约500个)少(约300个),一旦汽车制造商开始大规模生产,CVT 的成本将会比AT小。
由于采用该系统可以节约燃油,随着大规模生产以及系统、材料的革新,CVT 零部件(如传动带或传动链、主动轮、从动轮和液压泵) 的生产成本,将降低20%~30%。
机械无级变速器的研究历史和现状

机械无级变速器的研究历史和现状THEDEVELOPMENT}ⅡSTORYANDCI爪RENTSTA珏OFCONTINUOUSVA】UABLET]RANSh皿SSION孙吉平权英华张济政黄华星黄靖远清华大学,中国,北京,100084SunJiping,QuanYinghua,ZhangJizheng.Huanghumdng,HuangJingyuanTsinghuaUniversiMBeijing.尸.RChina,100084AbstractContinuousⅥtdableTransmission,01"CUbconcemcd∞a蛔technolosyinthercalIIlofU。
ansmission,which1Ⅳovldcsbcttcrpcrformatlccthmlgearswith础nnite.1yadiⅢ;IabIedriveratiosThcapplicationsofCVTswemlimitedduetotheh"torquecapabiliticsandr啦bilitvuntilrecentyearsThedevelopmentinCVTshashuprovcdthepcrfommccinmlywayssuch8torquecapabi】litlesandrcliabili饥andmadeCVYsbeabletoreplacetheUadidonaldlscretegearsinmoreandlnofcⅢ∞i.eautomodveLndus'町,.Thispaperis∞overviewtothedevelopmenthistoryandcmTentstateofCVTs,byanalysissevesaltypicaJmodelsKeyWordsCⅥ:ContinuousVailabIcTransmission,Histofy1.简介早在1490年,LeonardodaVinci勾画了机械无级变速嚣(CVT,ContinuousVariableTransmission)的草图,并简要描述了它的潜在优势。
分动器和差速器
• 车轮对路面的滑动不仅会加速轮胎磨损,增加汽车的动力消 耗,而且可能导致转向和制动性能的恶化。若主减速器从动 齿轮通过一根整轴同时带动两侧驱动轮,则两侧车轮只能同 样的转速转动。
• 为了保证两侧驱动轮处于纯滚动状态,就必须改用两根半轴 分别连接两侧车轮,而由主减速器从动齿轮通过差速器分别 驱动两侧半轴和车轮,使它们可用不同角速度旋转。这种装 在同一驱动桥两侧驱动轮之间的差速器称为轮间差速器。如 托森轮间差速器如图1-5.7 所示。
•
M2 = 0.5
(M0+Mt)
轮上总的的 内摩擦力矩 Mf与输入
差速器壳的
转矩M0之
比叫作差速
• 目前广泛使用的锥齿轮差速器,其内摩擦力矩 很小,锁紧系数K为1.1~1.4。因此可以认为差 速器总是将转矩近似平均分配给左右驱动轮的。 这样的转矩分配特性对于汽车在良好路面上行 驶是完全可以的,但当汽车在坏路面行驶时, 却会严重影响其通过能力。例如当汽车的一侧 驱动车轮驶入泥泞路面,由于附着力很小而打 滑时,即使另一车轮是在好路面上,汽车往往 不能前进。这是因为对称式锥齿轮差速器平均 分配转矩的特点,使在好路面上车轮分配到的 转矩只能与传到另一侧打滑驱动轮上很小的转 矩相等,以致使汽车总的牵引力不足以克服行 驶阻力而不能前进。
液力离合器结构与动作原1-叶轮 2-输出轮 3-油 4-油的流向
液力偶合器靠工作 液(油液)传递转矩, 外壳与泵轮连为一体, 是主动件;涡轮与泵轮 相对,是从动件。当泵 轮转速较低时,涡轮不 能被带动,主动件与从 动件之间处于分离状态; 随着泵轮转速的提高, 涡轮被带动,主动件与 从动件之间处于接合状 态.
五、防滑差速器
• 为了提高汽车在坏路上的通过 能力,可采用各种型式的防滑 差速器。防滑差速器的共同特 点是在一侧驱动轮打滑时,能 使大部分甚至全部转矩传给不 打滑的驱动轮,充分利用另一 侧不打滑驱动轮的附着力而产 生足够的牵引力,使汽车继续
汽车无级变速器技术和应用的简要分析

汽车无级变速器技术和应用的简要分析摘要:本文主要对汽车无级变速器的发展状况进行概述,以及研究概况。
此外,对金属带式无极变速器的基本结构进行介绍,将其与链条结构进行分析和比较。
笔者在对国内市场的主要无极变速器车型进行考察后,对汽车无级变速器技术和应用的进行简要的分析。
关键词:汽车无级变速器技术应用分析社会在不断的发展,但是一些问题也涌现了出来,比如:能源日益紧张,油价在不断的升高。
因此,对于汽车行业来说,要想获得长远的发展,就必须从节能减排上多下功夫。
传统的手动变速器也在面临着许多冲击,比如:各种各样的自动变速器出现,变速器行业的更新速度在不断的刷新。
CVT (continuously variable transmission),可以让无级变速实现,因此汽车也就具有了理想的性能。
2004年,中国汽车工业协会和中国齿轮协会就国内自动变速箱进行了研讨,并达成了共识:对于电控机械式自动变速器要优先发展,双离合器自动变速器要适时发展。
可见,CVT在中国市场上发挥的作用会越来越大,扮演更加重要的角色。
笔者从CVT的历史发展脉络出发,对前人的研究成果进行总结的分析。
首先从技术角度出发,接着对带式CVT和链式CVT进行对比。
对控制技术的发展历程进行简要回顾,以及对CVT的优势进行阐释。
1 无级变速器概述1.1 无级变速器发展概述无级变速器原型图在15世纪就出现了,该图是由达芬奇绘制的。
到了19世纪70年代,机械式无级变速器出现。
但是,机械式无级变速器并没有得到长远的发展,这和材质以及工艺方面的限制有很大的关系。
到了上个世纪70年代后,机械式无级变速器的发展比较快,产品的类型也比较丰富,比如:链式、带式、摩擦式以及脉动式。
在新的世纪里,其发展速度更加快。
1.2 国内外研究现状有关的研究很多,笔者在对这些研究进行分析后得出以下几点:在不同类型的CVT中,开发最早的是带式CVT,此外其的应用也很广泛。
(2)CVT的控制系统主要包括了以下几个方面:夹紧力控制、速比控制以及离合器控制。
金属带无级变速器传动性能的试验研究

第 3 8卷 第 5期
机
械
工
程
学
报
V N . o3 l8 o 5
Ma y 2 02 0
20 02年 5 月
CHI NES OURNAL ECHAN I EJ OF M CAL NGI EERI G E N N
钢片的挤压力 同时传递转矩( 2) 图 c。输出转矩可
表 示为
M。 — ) 击 +h +a R血 =( ( I ) o
() 5
当 i1 < 时,在上边产生较大的环张力 F ,这 时 . 钢环张力差( ) — 对转矩传递起阻碍作用 ,为平衡 外 部阻 力矩 ,钢 片逐 步在上 边堆 积 ,钢片 问产 生挤 压力,克服张力差 传递转矩。输出转矩可表示为
m
一 一
种汽车理想的变速器 ,能实现发动机与外界载 荷 的 晟 佳 匹 配 以满足 整 车 最 佳 燃 油 经 济 性 或 最 佳动 力 性 需求 ,仿真 和实 践 均 表 明 :装 用 C T 的 V 轿 车 比装 用 4 T 的轿 车 动 力性 和 经 济 性 都 提 高 A
一
d 凸
式中
Vd = s 曲( d +h n R凸 )
i 1 < i> 1
( a 3)
rb 3)
卜— _ v c T传动 比
具有独特 的动力传动机理。本文对 C T 的传动性 V
能 以及影 响 C VT传 动性 能 的因素进 行 了研 究
m— — 带轮角速 度( ds r / a 1
维普资讯
22 月 0 年5 0
杨 联 金 带 级 速 传动 堕 堕 堡 亚 等: 属 无 变 堡 壁 塑 墼 壅
M。 ( 一 2( d+h 一 o 血 = F ) n ) Q R 式中 ^ ——输出转矩( m) N- ,. —— 钢 环紧边 张力 ( N)
汽车无级变速器简介
1、无级变速器和自动变速器的渊源无级变速器和自动变速器在操作模式上都可以叫做“自动档”,因为它们都可以自动换档。
自动变速器是为了简便操作、降低驾驶疲劳而生的。
它利用行星齿轮机构进行变速,能根据油门踏板程度和车速变化,自动地进行变速。
驾驶者只需操纵加速踏板控制车速即可。
按齿轮变速系统的控制方式,它可以分为液控液压自动变速器和电控液压自动变速器;按传动比的变化方式又可分为有级式自动变速器和无级式自动变速器。
因此,无级变速器实际上是自动变速器的一种,但它比常见的自动变速器要复杂得多,技术上也更为先进。
无级变速器与常见的液压自动变速器最大的不同是在结构上,后者是由液压控制的齿轮变速系统构成,还是有挡位的,它所能实现的是在两挡之间的无级变速,而无级变速器则是两组变速轮盘和一条传动带组成的,比传统自动变速器结构简单,体积更小。
另外,它可以自由改变传动比,从而实现全程无级变速,使车速变化更为平稳,没有传统变速器换挡时那种“顿”的感觉。
2、CVT的基本结构及工作原理汽车的无级变速系统主要有以下几种形式:(1)液力机械AT-HMT(Hydrodynamic Mechanical Transmission)广泛应用于轿车、公共汽车、重型车辆、商用车和工程车辆上。
(2)机械式AT—AMT(Automated MechanicalTransmission)在通常机械式变速器基础上加上微机控制电液伺服操纵自动换档机构组成,目前它应用于部分低档轿车、局部卡车和商用车上。
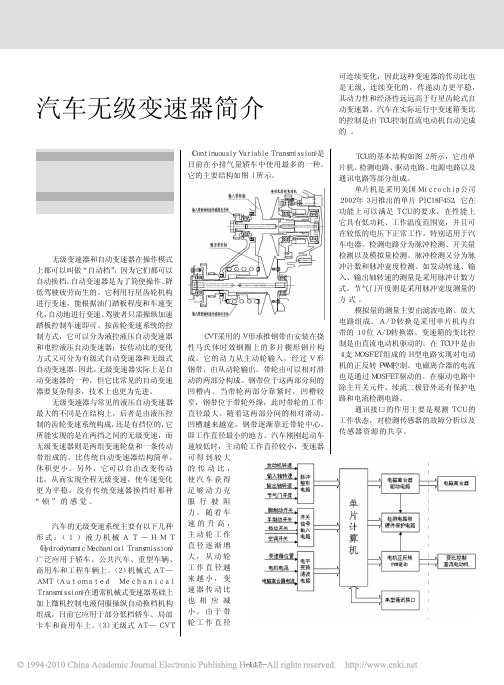
(3)无级式AT—CVT汽车无级变速器简介石启军 硅湖职业技术学院(Continuously Variable Transmission)是目前在小排气量轿车中使用最多的一种。
它的主要结构如图l所示。
图l CVT的基本结构CVT采用的V形承推钢带由安装在挠性马氏体时效钢圈上的多片楔形钢片构成。
它的动力从主动轮输入,经过V形钢带,由从动轮输出。
带轮由可以相对滑动的两部分构成。
变速器设计(详细过程完整版).
变速器用齿轮有直齿圆柱齿轮和斜齿圆柱齿轮两种。
4、轴的结构分析
第一轴通常与齿轮做成一体,其长度决定于离合器总成的轴向尺寸。第一轴的花健尺寸与离合器从动盘毂的内花键统一考虑, 目前一般都采用齿侧定心的矩形花健,键齿之间为动配合。
第二轴制成阶梯式的以便于齿轮安装,从受力及合理利用材料来看,也是需要的。各截面尺寸不应相差悬殊,轴上供磨削用的 砂轮越程槽处的应力集中会引起轴断裂。[4]
-4本设计是针对黑豹HB1027变速器设计,为五档手动中间轴式机械式变速器,因此,初步选取传动比范围为 5.0,最高档为超 速档,次高档为直接挡,传动比为1.0。 2、变速器各挡传动比的确定 选择最低档传动比时,应根据汽车最大爬坡度、驱动车轮与路面的附着力、汽车的最低稳定车速以及主减速比和驱动车轮的滚 动半径等来综合考虑、确定。
Key Words Automotive engineering,Transmission,Design,Manual
- II -
XXX大学本科毕业论文(设计)
目录
摘要 ............................................................. I Abstract.......................................................... I I 第1章绪论 (1)
长期处于主导变速器市场的地位,各方面技术经过长期市场考验,通过逐步积累,技术已经相当成熟。
2.手动变速器传动效率较高,理论上比自动变速器更省油。
3.手动变速器结构简单,制造工艺成熟,市场需求大,能够产生生产规模效益,生产成本低廉。
4.维修方便,维修成本便宜。
5.可以给汽车驾驶爱好者带来更多的操控快感。[1]
金属带式无级变速传动的载荷分布及滑移特性研究

无 级 变 速 传 动 ( o t u u ait nT a s s C ni o sV r i rnmi. n ao s n 简 称C T) 理 想 的 车 用 传 动 装 置 。采 用 C 可 i , o V 是 VT
的 向前 的推 力 , 以金 属 块 是 传 递 转 矩 的主 要 部 件 。 所
金属环 的主要 功 能是支撑 和 引导金属 块 的运行 。 这
以得 到传 动 系 与 发 动 机 工 况 的最 佳 匹 配 ,可 提 高 整 车 的燃 油 经 济 性 和 动 力 性 ,并 可 以 提 高 操 纵 方 便 性
和 舒 适 性 。 关 于 金 属 带 的受 力 分 析 和 数 学 模 型 的建 立 一 直 是C T 究 的一 个 重 要 方 面 。近几 年 , V 研 日本 学
(. un lo e ig cmmu ia o s m ng me tis tt o x c t e,e ig 0 5 0 ,hn ;.e i e a d T a s 1 o ra fb in o J j nct n a a e n ntue fre eu v s in 6 2 1 ia2V hc n rn — i i i Bj C l p r t nE gn e n ntueB rn s tt o eh ooy B in 0 0 C ia ot i n ier gIstt e igI tue f c n lg , e ig 10 8 ,hn) ao i i , ni T j 1
a o ete C b v , VT s p c a a t r t s a d t e s p b t e tl b l d me a l c rp l y a e a ay e . e su y p o h l h r ce s c i i i n h h e we n me a - e ta tlb o k o u l l l z d Th t d r - n e n
金属带式无级变速器燃油经济性及系统可靠性关键技术研究的开题报告

金属带式无级变速器燃油经济性及系统可靠性关键技术研究的开题报告1.研究背景和意义无级变速器作为汽车传动系统的核心部件,直接影响着汽车的燃油经济性和可靠性。
目前,大多数汽车采用的是基于摩擦转换的钢带无级变速器,这种变速器具有成熟的技术和稳定的性能,但存在传动效率低、噪音大、能耗多等问题。
为了改善汽车的燃油经济性和降低能耗,需要探索新型的无级变速器技术。
金属带式无级变速器是一种新型的变速器技术,具有传动效率高、噪音低、体积小、重量轻等优点。
本研究旨在探讨金属带式无级变速器的燃油经济性及系统可靠性关键技术,为汽车工业的发展提供技术支持和参考。
2.研究内容和方法本研究旨在通过实验研究和理论分析,深入探讨金属带式无级变速器的燃油经济性及系统可靠性关键技术,主要包括以下内容:①金属带式无级变速器传动效率的研究:利用试验台对金属带式无级变速器的传动效率进行测试,并与钢带无级变速器进行对比分析,探究金属带式无级变速器的传动效率优势及其改善空间。
②金属带式无级变速器噪声的研究:采用振动测试技术对金属带式无级变速器的噪声进行测试分析,探究不同结构参数及材料对变速器噪声的影响,并提出降低噪声的方案和建议。
③金属带式无级变速器耐久性的研究:通过试验对金属带式无级变速器的耐久性(包括疲劳强度、疲劳寿命等指标)进行测试,探讨金属带式无级变速器的耐久性表现及其优化措施。
④金属带式无级变速器可靠性的研究:结合故障诊断技术和可靠性工程方法,对金属带式无级变速器的关键部件和系统的可靠性进行分析和评价,提出可靠的设计建议和改进措施。
3.预期成果和应用价值本研究预计实现以下成果:①探索金属带式无级变速器的传动效率、噪声、耐久性和可靠性等关键技术特点;②提出优化金属带式无级变速器的方案和建议,为其应用推广提供技术支持和参考;③为汽车工业的发展提供技术进步的贡献,提高汽车的燃油经济性和可靠性。
4.研究进度安排本研究计划于2022年9月开始,共计18个月。
变速箱工艺和技术标准

2.7 圆柱滚子轴承 圆柱滚子轴承是滚子轴承中构造最为简单的一类轴承,内轮、外轮与滚子呈线接触, 径向负荷能力大,适宜于高速旋转。圆柱滚子轴承为分离型,安装、拆卸比较简便。 基本形式有:N、NU、NF、NJ、NUP: l N形:内圈有双档边,与滚子不可分离,外圈无档边,可从两边自由脱落; 2 NU形:外圈有双档边,与滚子不可分离,内圈无档边,可从两边自由脱落; 3 NF形:内圈有双档边,与滚子不可分离,外圈有单档边,只能从一边自由脱落; 4 NJ形:外圈有双档边,与滚子不可分离,内圈有单档边,只能从一边自由脱落; 5 NUP形:外圈有双档边,与滚子不可分离,内圈单档边,可从一边自由脱落,但内圈 档边一侧有一定位档圈,可以取下。 圆柱滚子轴承还有双列NN形、NNU形及四列圆柱滚子轴承。圆柱滚子轴承一般采用钢 板冲压保持架,尺寸较大或用于高速旋转的则采用黄铜车削保持架,双列或四列圆柱 滚子轴承则采用插销保持架,以延长轴承使用寿命。
滚动轴承(以下简称轴承)一般由内圈、外圈、滚动体和保持架组成。(如图1.1)
内圈与外圈之间装有若干个滚动体,由保持架使其保持一定的间隔一面相互接触和碰撞,从而进行圆滑的滚动。 轴承按照滚动体的列数,可以分为单列、双列和多列。 1)、内圈、外圈和滚动体 内圈、外圈上滚动体滚动的部分称作滚动面。球轴承套圈的滚动又称作沟道。
2.6 角接触球轴承 角接触球轴承的钢珠与内外圈接触点的连线与径向成一角度。接触角度一般分为15°、 25°、40°,分别用字母C、AC、B表示。角接触球轴承主要承受较大单向轴向负荷,接触 角度越大,承受负荷能力越大。保持架材料有钢板、黄铜或工程塑胶,成型方式有冲压或 车削,视轴承形式或使用条件不同而选用。其它尚有组合角接触球轴承、双列角接触球轴 承及四点接触球轴承。 l 单列:78XX、79XX、70XX、72XX、73XX、74XX 2 微型:70X 3 双列:52XX、53XX、32XX、33XX、LD57、LD58 4 四点接触:QJ2XX、QJ3XX
《变速箱工作原理》PPT课件

缺点: a.中性转向或稍有不足转向特性; b.轴距较长、传动轴较长需要加辅助支撑; c.整车装备质量大; d.传动轴限制了轿车地板的降低。
3.2前置发动机前轮驱动(前置前驱FF)
优点: a.机构紧凑,内部空间大; b.整车装备质量小8%左右; c.轴距小10%左右; d.降低成本; e.方向稳定性好,高速行驶安全性好; 这种布置形式应用于微型、普通级和中级轿车
两轴式变速器与离合器、主减速器的壳 体连成一体,且主减速器器的主动齿轮就 装在变速器第二周的输出端。
16
一轴 中间轴 图3:3轴式变速器
二轴
17
2.2 三轴式变速器
如图3所示结构:第一、二轴同心并与中间轴平行。 第一轴的前端用轴承支撑与 发动机飞轮中心,并 经花键与离合器从动盘相连;第二轴的后端经用 花键连接的突缘装有中央制动鼓和传动轴的千万 向节。第一轴的后端与其成一体的长啮合齿轮及 第二轴的各档齿轮分别与中间轴相应的齿轮啮合。
特点: a.除直接档外,其它各档的传动效率有所降低; b.在齿轮中心距较小的情况下,仍然可以获得大
的一档传动比。
18
下面是我部门开发的5T17变速箱齿轮与轴的安排 1-五倒档同步器 2-主轴五档齿轮 3-主轴四档齿轮
4-三/四同步器 5-主轴三档齿轮 6-主轴 7-副轴 8副轴一档齿轮 9-一/二档同步器 10-副轴二档齿轮 红色箭头为一档传动路线 黄色箭头为二档传动路线 绿色箭头为三档传动路线 蓝色箭头为四档传动路线 紫色箭头为五档传动路线
空调、灯光、雨刮,以及其他为满足
舒适性、安全性需要而设置的部件。
2
1.离合器 2.变速器 3.万向节 4.驱动桥 5.差速器 6.半轴 7.主减速器 8.传动轴
图 1 传动系机构图
CVT(无级变速器)工作原理简介
CVT(无级变速器)工作原理简介中国汽车召回网2010-03-29CVT也叫无级变速器,是汽车变速器的一种,与有级变速器的主要区别在于:它的速比不是间断的点,而是一系列连续的值,从而实现了良好的经济性、动力性和驾驶平顺性,而且降低了排放和成本。
我国目前销售的汽车装备了各种变速器,包括手动变速器(MT)、自动变速器(AT)(含DSG)和无级变速器(CVT)。
下面作简要介绍。
1、MT手动变速器(MT:Manual Transmission)采用齿轮组,由于每挡齿轮组的齿数是固定的,所以各挡速比是个固定值(也就是所谓的“级”)。
比如,一挡速比是3.455,二挡是2.056,再到五挡的0.85,这些数字再乘上主减速比就是汽车动力传动系统的总传动比,5挡变速器共有5个值(即有5级),所以说它是有级变速器。
手动变速器是最常见的变速器,相对AT和CVT而言,它的结构最简单,主要由输入轴、轴出轴和中间轴、各轴轴承、各挡齿轮、同步器、换挡操纵机构组成。
手动变速器故障率相对较低,使用成本也较低。
2、AT自动变速器(AT:Automatic Transmission)可以自动升挡和降挡,电脑主要根据车速和负荷(油门踏板的行程)进行升降挡控制,同时还要参考变速器油温、换挡模式等多种信号。
AT与MT的相同点就是二者都是有级式变速器,只不过AT在各个挡位都有一段连续的速比变化,而且能根据车速的快慢来自动实现挡位的增减,可以消除手挡车“顿挫”的变挡感觉。
(1)AT的结构:与手动波相比,液力自动波(AT)在结构和使用上有很大的不同。
手动波主要由齿轮和轴组成,通过不同的齿轮组合产生变速变矩;而AT是由液力变扭器、行星齿轮和液压操纵系统组成,通过液力传递和齿轮组合的方式来达到变速变矩。
其中液力变扭器是AT最具特点的部件,它由泵轮、涡轮和导轮等构件组成,直接输入发动机动力传递扭矩和离合作用。
(2)AT的优缺点:AT不用离合器换档,档位少变化大,连接平稳,因此操作容易,既给开车人带来方便,也给坐车人带来舒适。
金属带式无级变速器夹紧力的分析与研究
1Hua nvm ̄, tt KyL brtyo da cdD s nadMa uatr g o eieB ,C a gh 4 08 . n nU i i Sae e a oao e r fA vne ei n nf c i frVhc o g un l h n sa 10 2
c e ti n r d c d f rc n i e i h f cs o e e au e o lmpng fr e.Th n f zy ag rt m s u e o s — in si to u e o o sd rng t e ef t ftmp r t r n ca i o c e e u z lo ih i s d t e l c he s f t a tr n v ro s wo k n o d to s,a d he c o d tr n h a g tca i g fr e o tl V— e tt aey fc os i a i u r i g c n iin n n e t e emi e t e tr e l mp n o c fmea b l.Th e u t fr a e il e ts o t a t he a o e me to d meh d,t e tr e lmpig fr e c n b et e r s ls o e lv h ce t s h w h twih t b v — n ine t o h a g tc a n o c a e ef ci ey r d c d a d t e ta miso fii n y o tl V・ l f tv l e u e n h r ns s in efce c fmea ・ t CVT s i r v d wih u lp a e i tlV・ e be i mp o e t o tsi p g n me a- - - b l. et Ke wo d y r s:m e a bet CVT ;t r e l m pi o c t lV— l a g tca ng f r e;f z l o ih ;c r e to f c o uz y a g r t m o r c i n a t r
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要在具有广阔的发展前景和市场空间的汽车行业中,车辆技术也得到较快的发展。
金属带式无级变速器是一种新型的机械摩擦式无级变速器,具有承载能力强、效率高、平稳性好、环保节能等优良的传动特性,特别适用于需要传递中大功率而又需无级调速的场合。
本设计是基于现代人们对汽车性能的更高要求,鉴于国内外专家对无级变速器的研究与分析,结合金属带式无级变速器的现状和发展趋势、基本结构、传动原理、性能特点,主要以其在轿车中的应用,设计金属带式无级变速器的传动机构,根据对设计参数的分析,对整个无级变速器的各级传动部分的传动方式进行详细的设计,包括主、从动带轮;主、从动锥盘;中间减速机构,使其与传统的变速器相比,耐用性能、加速性能、燃油性能以及排放性能都得到改善。
关键词:金属带;无级变速器;传动机构;机械摩擦式;主、从动锥盘;中间减速机构ABSTRACTIn a broad development prospects and market space in the auto industry, vehicle technology has also been developed quickly. Metal belt type variator is a new type of mechanical friction type variator, high bearing ability, high efficiency, energy saving and steadiness, good environment protection fine transmission characteristics, especially suitable for high power and in need to pass to stepless speed regulation occasion.This design is based on the modern people to an automobile performance higher request, in view of the fact that the domestic and foreign experts to variator's research and the analysis,combined with the metal belt type continuously variable transmission of the status and development trends, the basic structure, transmission principle, performance characteristics.According to its application in cars, completed the design of metal belt CVT transmission, based on the design variable's analysis, the transmission part at all levels of detail design transmission mode, , including master, driven pulleys; Lord, driven cone-disk; intermediate deceleration institutions and compared with the traditional transmission, durable performance, and accelerating performance, fuel performance and emission performance is improved.Keywords:Metal belt;Contiuously Variable Transmission;transmission;a type of mechanical friction; lord, driven cone-disk; ntermediate deceleration institutions目录摘要 (I)Abstract................................................................................................................................ I I 第1章绪论 .. (1)1.1 概述 (1)1.1.1 金属带式无级变速器的发展 (1)1.1.2 金属带式无级变速器的优点 (2)第2章金属带式无级变速器传动的基本原理 (4)2.1 金属带式无级变速器的基本组成 (4)2.1.1 起步离合器 (4)2.1.2 行星齿轮机构 (5)2.1.3 无级变速机构 (5)2.1.4 控制系统 (5)2.1.5 中间减速机构 (7)2.2 金属带式无级变速器的工作原理 (7)2.2.1 金属带式无级变速器的工作原理 (7)2.2.2 离合器换向机构的工作原理 (7)2.3 本章小结 (7)第3章基本数据选择 (9)3.1 主要技术指标 (9)3.1.1 基本参数 (9)3.2 齿轮相关数据的计算 (11)3.2.1 齿轮参数 (11)3.2.2 各齿轮齿数及参数分配 (12)3.3 滚动球键 (21)3.4 本章小结 (22)第4章齿轮校核 (23)4.1 齿轮材料的选择原则 (23)4.2 计算各轴的转矩 (23)4.3 轮齿强度计算 (23)4.3.1 齿面接触强度参数计算 (23)4.3.2 齿面接触应力计算 (32)4.3.3 轮齿弯曲强度计算 (35)4.4 各齿轮受力计算 (41)4.5 本章小结 (43)第5章轴及轴上支撑件的校核 (44)5.1 轴的工艺要求 (44)5.2 轴的强度计算 (44)5.2.1 初选轴的直径 (44)5.2.2 轴的强度验算 (45)5.3 轴承的选择及花键的可靠性分析 (53)5.4 本章小结 (55)结论 (56)参考文献 (57)致谢 (59)附录A (60)附录B ..................................................................................................... 错误!未定义书签。
第1章绪论1.1 概述近些年来,汽车技术有了很大发展,汽车的性能不断提高,汽车变速器对汽车的性能有较大的影响。
目前,自动变速器技术已经很成熟,但是,现在应用的自动变速器基本上都是有级变速器,对汽车无级变速器还处在研究、实验阶段。
在欧洲的发达国家已经有很多大的汽车制造商把无级变速器应用于轿车,节能减排已经成为世界对于汽车的一种追求,在我国汽车无级变速器的研究更是处于起步阶段。
设计一种能够适用于轿车的机械无级变速器已经显得越来越重要。
本设计结合金属带式无级变速器,设计金属带式无级变速器的传动机构。
根据对设计参数的分析,对整个无级变速器的各级传动部分的传动方式进行详细的设计。
1.1.1 金属带式无级变速器的发展由于内燃机工作特性的限制,为了发挥内燃机的能力和降低油耗,人们采用了变速器,而最佳的选择是无级变速器。
二十世纪七十年代中期,荷兰Van Doorne's Transmissie B.V公司(简称VDT公司)开发出一种金属带式无级自动变速器,称为VDT-CVT(Continuously Variable Transmission)。
这种无级自动变速器克服了以前其它传动形式的缺点,实现了真正意义上的无级变速传动。
VDT-CVT自1987年商品化以来,到目前为止,世界上几乎所有的汽车生产厂家,都接受了这项技术,开发出自己的CVT。
CVT的适用范围也从最初的0.6升,发展到目前的3.3升。
2000年,中国的程乃士教授开始研发无偏斜曲母线锥盘金属带式无级变速器,2003年研发无偏斜复合母线锥盘金属带式无级变速器,2005年研发无偏斜等强共轭曲母线无级变速器,并于2007年在吉利汽车公司实现装车;2006年研发平盘非对称直母线无偏斜金属带式无级变速器,2007年在众泰汽车公司实现装车。
金属带式无级变速器是汽车理想的传动系统,它可提高汽车的经济性,改善汽车的动力性,便于操作是汽车的核心技术之一。
金属带式无级变速器的结构、变速原理、受力情况等已经研究成熟。
金属带式无级变速器的试验应包括专用台架及路况试验,CVT专用台架技术由世界上少数几个大公司垄断,如ZF公司、Doorne公司等,CVT 所有的动态实验都能在专用台架上进行,但专用台架造价高,国内外研究人员研究CVT的动态特性时大多在自制的简易实验台上并配合仿真进行。
结合金属带式无级变速器,设计金属带式无级变速器的传动机构,使变速机构实现迅速、准确的变速。
1.1.2 金属带式无级变速器的优点汽车界对CVT技术的研究开发日益重视,特别是在微型轿车中,CVT被认为是最佳的传动装置。
根据国内外一些文献资料和实际经验,将其优点归纳为以下几个方面:1. 速比无级调节由计算机控制速比连续的变化,驾驶员无需考虑换档,消除了人为换档技术的影响,不会出现MT的换档时速比的跳跃,使汽车驾驶平顺、舒适。
故在简化了汽车行驶过程中的操作同时,也减轻了驾驶员的劳动强度,提高了行车的安全性,使汽车易于驾驶,有利于汽车的普遍使用。
2. 提高燃油经济性和动力性采用液力变矩器的无级变速器,由于其工作原理是用油作为动力传动的介质,许多能量消耗在油的内摩擦上,传动效率低,通常为80%~85%,比传统的MT和AT 大约费油10%~20%,而且液力变矩器转差越大,效率越低。
通常减速比不大于2,只能再增加2~3档有级变速,每两档中间用液力变矩器实现无级变速。
由于无级变速传动使发动机的工作点与车速无关,根据不同的需要可以控制发动机的工作点在最经济工作点或最佳动力工作点工作,依靠变速器无级调速来适应汽车的各种速度,可以使发动机燃烧最好,排气污染最小,达到节油的目的。
因此无级变速传动比其它传动方式表现出更高的经济性和动力性。
目前据国外统计数据,采用CVT的汽车比采用AT的汽车节油7%~15%。
同样,ZF公司进行了对比试验,结果表明:在美国环境保护局城市和公路循环工况下,装备CVT的汽车比4档AT汽车燃油经济性提高10%;0~60 mph加速试验中,装备CVT的汽车比AT汽车少用1秒多。