[实用生产表格]机器人点检操作指南
维护保养-松下机器人点检指南
2
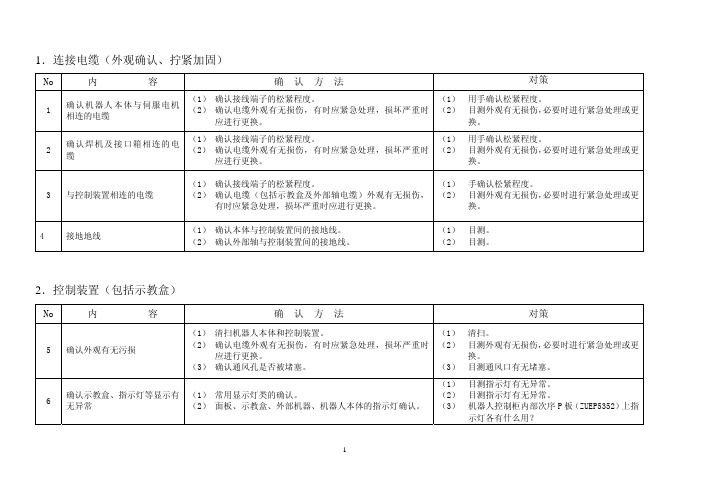
3.焊枪(焊枪本体)部
No
内
容
19 确认有无飞溅及灰尘附着
20 确认外观有无损伤
21 确认并清扫绝缘处 22 松紧的确认、紧固
确认方法
对策
(1) 清扫。
(1) 清扫。
(1) 确认焊枪、焊枪本体外观有无损伤,有时要应急处理, (1) 目测外观有无损伤,进行紧急处理,必要时
严重时要更换零件。
进行更换。
有时应紧急处理,损坏严重时应进行更换。
换。
4 接地地线
(1) 确认本体与控制装置间的接地线。 (2) 确认外部轴与控制装置间的接地线。
(1) 目测。 (2) 目测。
2.控制装置(包括示教盒)
No
内
容
确认方法
对策
5 确认外观有无污损
(1) 清扫机器人本体和控制装置。 (2) 确认电缆外观有无损伤,有时应紧急处理,损坏严重时
(1) 确认接线端子的松紧程度。 (2) 确认电缆外观有无损伤,有时应紧急处理,损坏严重时
应进行更换。
(1) (2)
用手确认松紧程度。 目测外观有无损伤,必要时进行紧急处理或更 换。
3 与控制装置相连的电缆
(1) 确认接线端子的松紧程度。
(1) 手确认松紧程度。
(2) 确认电缆(包括示教盒及外部轴电缆)外观有无损伤, (2) 目测外观有无损伤,必要时进行紧急处理或更
(1) 确认并清扫绝缘件与焊枪、焊枪本体的安装部位及绝缘 (1) 清扫各部位,目测绝缘件是否损坏,必要时
件与送丝电机安装部位。
进行更换。
(1) 紧固焊枪安装螺钉及 CC 零件、母材线、地线部位。
(1) 紧固各部位。
4.机器人本体
No
机械点检操作规程规范
机械点检操作规程规范机械点检是一项重要的维护工作,能够确保机械设备的正常运行和安全性。
为了保证点检操作的规范性和有效性,制定一套机械点检操作规程是必要的。
以下是一份机械点检操作规程的范例,供参考。
一、机械点检前准备工作1. 确定点检周期:根据机械设备的使用情况和特点,确定点检的周期,如日常点检、周点检等。
2. 制定点检表格:根据机械设备的类型和特点,制定相应的点检表格,详细列出需要点检的项目和内容。
3. 准备点检工具:准备好需要用到的点检工具,如钳子、螺丝刀、测量工具等,以及安全设备,如手套、护目镜等。
二、机械点检操作流程1. 核对设备信息:查看设备的标识,确认设备的名称、型号和编号与点检表格上是否一致。
2. 安全检查:确保设备停机并断开电源后,进行安全检查,包括检查设备的锁定装置、紧固件和防护罩是否完好,以及是否有漏电等现象。
3. 外观检查:检查设备的外观,包括设备的表面状况、润滑油是否泄漏和设备周围是否有杂物等。
4. 运行检查:启动设备,观察设备的运行情况,包括是否有异常声音、震动和漏油等现象。
5. 功能检查:按照设备的功能要求,使用相应的操作方式和动作进行检查,如按下按钮、拧动螺丝等。
6. 测量检查:使用测量工具对设备的关键参数进行检测,如测量设备的压力、温度和转速等。
7. 维护检查:检查设备的维护情况,如润滑油是否充足、滤清器是否需要更换等。
8. 记录检查结果:将点检过程中发现的问题和异常情况进行记录,并标注清楚点检日期和点检人员的姓名。
9. 整理工作区:点检完毕后,整理好点检工具和材料,将工作区域恢复整洁。
三、机械点检注意事项1. 安全第一:点检前要确保设备已停机和断电,并佩戴好相应的安全设备。
2. 专人点检:点检工作应由经过专业培训和熟悉设备的人员进行,确保点检的准确性和有效性。
3. 注意细节:点检时要注意细节,如观察设备运行的声音、震动和温度变化等,有利于发现潜在问题。
4. 及时处理问题:如果在点检过程中发现设备存在问题,应及时进行处理,并记录在点检表格上,以便后续跟踪和处理。
机器人操作流程的说明书
机器人操作流程的说明书一、引言机器人操作流程的说明书旨在提供详细的指导和步骤,以确保机器人能够正确且有效地执行各种任务。
本文将逐步介绍机器人操作的主要流程和注意事项。
二、装置准备1. 确保机器人电源已连接,并插入电源插座。
2. 检查机器人的各个部件是否安装正确并紧固。
3. 根据实际需要,调整机器人的工作环境,确保周围没有障碍物。
三、机器人操作步骤1. 开机a. 按下机器人的电源开关,等待机器人启动。
b. 在控制面板上输入机器人的登录信息,包括用户名和密码。
c. 确认登录信息无误后,点击登录按钮。
2. 执行任务a. 从任务列表中选择需要执行的任务,并点击任务名称。
b. 检查任务要求和指示,确保明确了解任务的要求和目标。
c. 按照任务指示,控制机器人的移动、抓取或其他操作,执行任务。
d. 在任务执行过程中,随时观察机器人的状态和工作情况,确保任务进展顺利。
e. 如遇意外情况或问题,立即停止机器人操作,并采取相应的修复措施。
3. 完成任务a. 当任务执行完毕时,确认操作结果是否符合预期要求。
b. 如操作结果正确,点击确认完成任务。
c. 如操作结果有误或不符合要求,重新进行必要的调整和操作,直至满足要求。
d. 确认任务执行完成后,关闭机器人电源。
四、安全提示1. 在操作机器人之前,确保已经阅读并理解相关安全手册和操作规程。
2. 在操作过程中,遵守安全操作规程,确保自身和他人的安全。
3. 注意保持机器人周围的工作环境整洁并无障碍物,防止发生意外。
4. 如遇到紧急情况或机器人失控,请立即采取应急措施,并通知相关负责人员。
五、维护保养1. 在机器人操作完成后,定期清洁机器人,包括机身、传感器和工具等。
2. 定期检查机器人的各个部件是否安装牢固,如有松动或损坏,应及时修复或更换。
3. 定期进行机器人的维护保养,包括润滑、校准和更换零部件等。
4. 如发现机器人存在异常情况或故障,应及时报修,并由专业维修人员进行维修。
ABB机器人简单操作指南【范本模板】
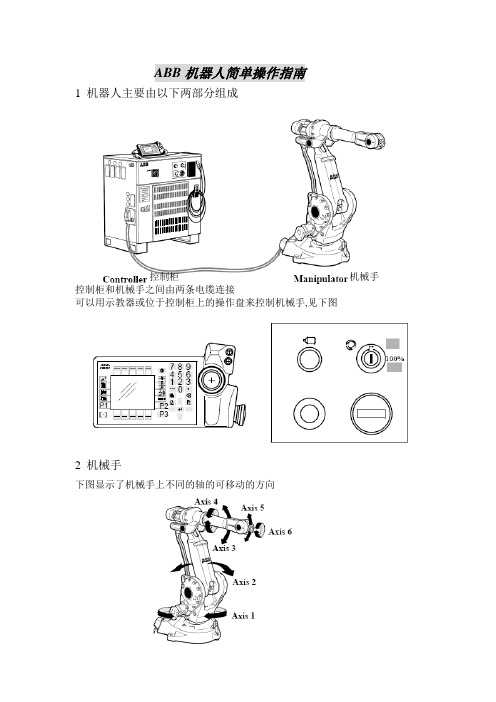
ABB机器人简单操作指南1 机器人主要由以下两部分组成控制柜机械手控制柜和机械手之间由两条电缆连接可以用示教器或位于控制柜上的操作盘来控制机械手,见下图2 机械手下图显示了机械手上不同的轴的可移动的方向3 控制柜下图显示了控制柜的主要部分示教器操作盘主开关驱动磁盘4 操作盘下图描述了操作盘的功能电机开按钮及指示灯操作模式选择开关急停,如果按下请拉出来工作时间计数器,显示机械手的工作时间电机开在电机开状态,机器人的电机被激活,Motors On按钮保持常亮。
常亮准备执行程序快速闪烁(4Hz) 机器人没有校准或选择计数器没有更新。
电机已经打开。
慢速闪烁(1Hz)一个保护停机被激活,电机关闭.工作模式自动(生产模式)在这个模式下,当运行准备就绪后,不能用控制杆手动移动机器人工作模式手动减速运行(程序模式)在机器人工作区域里面对其编程时候。
也用于在电机关状态设置机器人.工作模式手动全速(选择,测试模式)用来在全速情况下运行程序急停当按下按钮时,无论机器人处于什么状态都立即停止.要重新启动需将按钮恢复工作时间计数器显示机械手工作的时间5 示教器见下图控制运行使能设备显示屏控制杆急停按钮手动慢速运行:打开手动慢速运行窗口编程: 打开编程及测试窗口输入/输出:打开输入输出窗口,用来手动操作输入输出信号其它:打开其它窗口如系统参数,维护,生产及文件管理窗口.停止:停止程序执行对比度:调节显示屏的对比度菜单键:按下后显示包含各种命令的菜单功能键: 按下后直接选择各种命令动作单元: 按下后手动慢速运行机器人或其它机械元件动作形式:按下后选择怎样手动慢速运行机器人,再定位或直线动作形式: 轴-轴移动。
1=轴1-3,2=轴4—6增加:增加手动慢速运行开/关列表: 按下后将指针从一个窗口移到另一个窗口(通常由双画线分开)返回/翻页:按下翻页或返回上级菜单删除: 删除选中的参数确认: 按下输入数据上下键:上下移动指针左右键:左右移动指针编程键:怎样定义这些键,见第10章,系统参数—示教器5。
机器人TPM管理制度及点检表
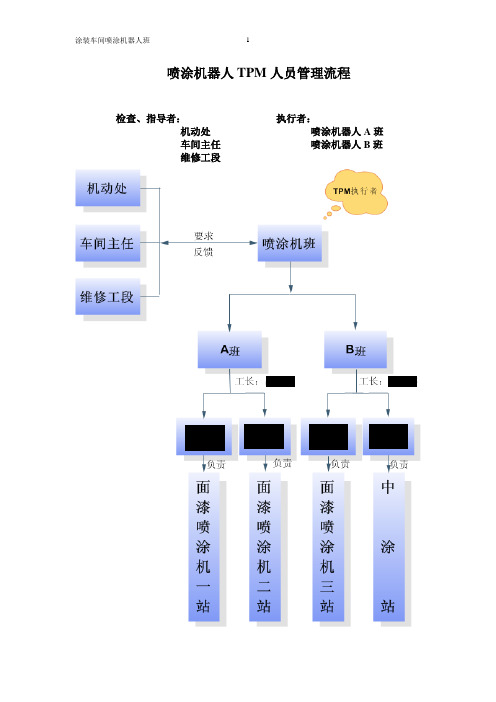
涂装车间喷涂机器人班 1喷涂机器人TPM人员管理流程检查、指导者:执行者:机动处喷涂机器人A班车间主任喷涂机器人B班维修工段涂装车间喷涂机器人班 2:喷涂机器人班TPM总制度涂装车间喷涂机器人班 3喷涂机器人班TPM管理细则一.TPM之“5S”二.TPM之培训定期对员工做相关安全、技能等的培训。
三.TPM之日常点检按照点检表严格进行点检并记录;TPM之日常加班维护、紧急事后修理以及修旧利废进行记录,以便以后的归档、分析和总结。
TPM之日常点检表、TPM之日常加班维护表、TPM之紧急事后修理表、修旧利废表如下所示:名称站序序号点检保养内容点检保养周期每日每周每月半年一年面漆喷涂机选择站1 行程开关的检查√2 光电管的检查与校对√3 光电管端口胀物的清理√4 选择操作盘按钮及指示灯的检查√5 控制柜电器线路的检查√No.1st1 行程开关的检查√2 光电管的检查与校对√3 光电管端口胀物的清理√4 CRT盘按钮及指示灯的检查√5 电控柜电器线路的检查√6 电控柜空调的清理√7 气控柜气动元件及管路的检查√8 油水分离器、空气滤芯的清理及更换√9 喷头、喷杯及整形空气罩的清洗及检查√10 外包薄膜纸的更换√√11 空气马达及其密封件的检查√12 高压发生器的清理√13 马达检测光纤的检查与调整√14 喷头接口端密封圈的检查√15 T/D阀组的检查√16 换色阀、三通洗净阀的检查√17 喷臂内管路的检查√18 坦克链及内穿管子的检查√19 FGP齿轮泵的检查√20 侧喷往复密封带的清理√21 机械传动部分的检查及润滑√22 减速机油的更换√23 吐出量的测定及校正√喷涂机器人TPM日常点检保养24 形状空气、高电压实际值的检测校正√名称 站序 序号点检保养内容点检保养周期 每日每周 每月 半年一年面 漆 喷 涂 机No.3st1 行程开关的检查 √2 光电管的检查与校对 √3 光电管端口胀物的清理√ 4 CRT盘按钮及指示灯的检查 √ 5 电控柜电器线路的检查 √ 6 电控柜空调的清理√ 7 气控柜气动元件及管路的检查√ 8 油水分离器、空气滤芯的清理及更换 √ 9 喷头、喷杯及整形空气罩的清洗及检查 √ 10 外包薄膜纸的更换√ √ 11 空气马达及其密封件的检查 √ 12 高压发生器的清理√ 13 马达检测光纤的检查与调整 √ 14 喷头接口端密封圈的检查 √ 15 T/D阀组的检查√ 16 换色阀、三通洗净阀的检查 √ 17 喷臂内管路的检查√ 18 坦克链及内穿管子的检查 √ 19 FGP齿轮泵的检查 √ 20 侧喷往复密封带的清理 √ 21 机械传动部分的检查及润滑 √ 22 减速机油的更换 √ 23 吐出量的测定及校正√ 24形状空气、高电压实际值的检测校正√名称站序序号点检保养内容点检保养周期每日每周每月半年一年面漆喷涂机No.2st1 光电管的检查与校对√2 光电管端口胀物的清理√3 CRT盘按钮及指示灯的检查√4 电控柜电器线路的检查√5 电控柜空调的清理√6 气控柜气动元件及管路的检查√7 油水分离器、空气滤芯的清理及更换√8 枪头及喷嘴的清洗√9 外包薄膜纸的更换√√10 换色阀、三通洗净阀的检查√11 喷臂内管路的检查√12 坦克链及内穿管子的检查√13 侧喷往复密封带的清理√14 机械传动部分的检查及润滑√15 减速机油的更换√16 吐出量的测定及校正√17 形状空气、高电压实际值的检测校正√喷涂机器人TPM日常点检保养总名称站序序号点检保养内容点检保养周期每日每周每月半年一年中涂喷涂机选择站1 行程开关的检查√2 光电管的检查与校对√3 光电管端口胀物的清理√4 选择操作盘按钮及指示灯的检查√5 控制柜电器线路的检查√No.1st1 行程开关的检查√2 光电管的检查与校对√3 光电管端口胀物的清理√4 CRT盘按钮及指示灯的检查√5 电控柜电器线路的检查√6 电控柜空调的清理√7 气控柜气动元件及管路的检查√8 油水分离器、空气滤芯的清理及更换√9 喷头、喷杯及整形空气罩的清洗及检查√10 外包薄膜纸的更换√√11 空气马达及其密封件的检查√12 高压发生器的清理√13 马达检测光纤的检查与调整√14 喷头接口端密封圈的检查√15 T/D阀组的检查√16 换色阀、三通洗净阀的检查√17 喷臂内管路的检查√18 坦克链及内穿管子的检查√19 FGP齿轮泵的检查√20 侧喷往复密封带的清理√21 机械传动部分的检查及润滑√22 减速机油的更换√23 吐出量的测定及校正√喷涂机器人日常加班TPM维护表加班时间班次站序加班实施的项目面漆No.1st面漆No.2st面漆No.3st中涂站面漆No.1st面漆No.2st面漆No.3st中涂站面漆No.1st面漆No.2st面漆No.3st中涂站面漆No.1st面漆No.2st面漆No.3st中涂站面漆No.1st面漆No.2st面漆No.3st中涂站维修时间班次维修内容喷涂机器人TPM紧急事后维修表。
机器人操作点检保养指导书a1
机器人操作点检保养指导书a1编制审核批准版本修改项目序号符号1234567123456123123123机械臂121234维护保养部位图示512部位编号点检频次责任岗位符号1每天操作者2每天操作者3每天操作者4每天操作者5每天操作者机器人6每天操作者7每天操作者8每天操作者9每天操作者滑台10每天操作者部位编号周期责任岗位符号1每班2每班3每班操作者/维修工43个月54个月编号161个月安全戴手套要戴眼镜穿保护鞋戴安全帽人机工程关键操作K技巧操作编号3按钮与指示灯完好各润滑点加注润滑油定期对电缆线、控制线防护、绝缘皮查看,无明显损坏每班清理软管束、连接体与焊枪连接牢固维修工操作者按钮与指示灯润滑点各按钮及指示灯功能正常,外观无损坏定期对导轨、转动轴承、空气润滑油杯、焊机加润滑油与导电油定期对焊机、机器人、控制柜等内部灰尘进行清理电缆焊接控制柜、现场控制柜等内部灰尘清理电缆线、控制线与防护查看机器人各轴及焊枪姿态是否在程序设定的起始位置。
在再启动或最初启动因异常情况停机的机器人时,需要非常小心。
启动前,请确认异常因素已经被完全排除,安全护栏内没人,急停按钮处于随时都可以按下的状态。
不同车型工件对应不同程序,焊接之前要确认工件与程序是否一致。
更换其它程序前要对上一个程序做的修改进行保存。
关闭驱动或伺服电源。
用新程序进行焊接时,要全程跟踪,防止问题发生。
方法及要点说明开启循环冷却水、压缩空气、焊机控制器、焊枪等附属设备。
查看设备状态及交接班记录,确认设备是否正常,并检查劳保穿戴。
开启系统控制柜主开关。
开机操作工装夹紧未到位,检测开关未感应到,程序中止关闭系统控制柜主电源。
关机操作设备名称设备编号负责人关闭焊接控制器、循环水、压缩空气等附属设备。
清理设备现场。
一开关机操作12内容王陶适用机型江苏金坛汽车工业有限公司设备操作、点检、维护保养指导书KUKA焊接机器人焊接机器人A0控制柜控制柜开关焊接控制器压缩空气、循环水焊枪各轴是否在设定位置工装夹具及滑台现场操作面板符号说明:2三安全及异常处理1内部灰尘连接插头部位名称焊枪C、【设备保养作业标准】——记录文件《维护保养记录》焊渣清理水气管目视绑扎整齐,无磨损、泄漏,拖链的气管要求隔片固定好1连接螺母紧固装卸工件程序调整程序更换常见异常3保养方法/标准目视在0.4~0.6Mpa之间循环冷却水堵塞,焊枪温度报警、压缩空气压力不够,焊装压力报警、电极帽脱落漏水请确认在自动运转前无其他人员在安全护栏内。
松下机器人点检指南G2
松下机器人点检指南G2在现代工业生产中,机器人的应用越来越广泛。
松下机器人以其出色的性能和稳定性,在众多领域发挥着重要作用。
为了确保机器人的正常运行,延长其使用寿命,提高生产效率,定期的点检是必不可少的。
本指南将详细介绍松下机器人的点检要点和方法,帮助您更好地维护和管理机器人设备。
一、点检前的准备工作在进行点检之前,需要做好以下准备工作:1、熟悉机器人的操作手册和技术规格仔细阅读松下机器人的操作手册和技术规格,了解机器人的结构、功能、性能参数以及安全注意事项等。
这将为后续的点检工作提供重要的参考依据。
2、准备必要的工具和设备根据点检的内容和要求,准备好相应的工具和设备,如扳手、螺丝刀、万用表、示波器、清洁工具等。
确保工具和设备的完好性和准确性。
3、确保工作环境安全在点检机器人之前,要确保工作环境安全,清除周围的障碍物和杂物,设置好警示标识,防止无关人员进入工作区域。
同时,要确保机器人处于断电状态,并采取可靠的制动措施,防止机器人意外移动。
二、外观检查首先,对松下机器人的外观进行检查。
1、查看机器人本体是否有明显的损伤、变形或腐蚀检查机器人的外壳、手臂、关节等部位,看是否有碰撞、划伤、裂缝、锈迹等情况。
如果发现有损伤,要及时记录并评估其对机器人性能的影响。
2、检查电缆和管路是否完好检查机器人连接的电缆和管路,看是否有磨损、断裂、松动、泄漏等现象。
特别是电缆的接头部位,要确保连接牢固,无接触不良的情况。
3、检查机器人的标识和铭牌是否清晰完整确认机器人的型号、序列号、生产日期等标识和铭牌清晰可见,以便于追溯和管理。
三、机械部件点检机械部件是机器人正常运行的关键,需要重点关注以下方面:1、关节和轴的检查手动转动机器人的各个关节和轴,感受其转动是否灵活,有无卡顿、异响或异常阻力。
检查关节的润滑情况,如发现润滑不足,应及时添加适量的润滑油。
2、传动部件的检查检查机器人的皮带、链条、齿轮等传动部件,看是否有松动、磨损、断裂等情况。
机器人点检表
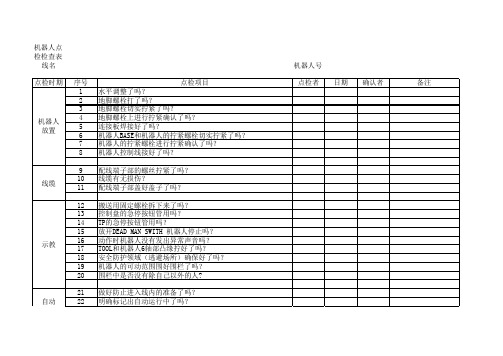
机器人号 点检者 日期 确认者 备注
机器人 放置
ห้องสมุดไป่ตู้
线缆
示教
自动
机器人点检检查表 线名 点检时期 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 点检项目 水平调整了吗? 地脚螺栓打了吗? 地脚螺栓切实拧紧了吗? 地脚螺栓上进行拧紧确认了吗? 连接板焊接好了吗? 机器人BASE和机器人的拧紧螺栓切实拧紧了吗? 机器人的拧紧螺栓进行拧紧确认了吗? 机器人控制线接好了吗? 配线端子部的螺丝拧紧了吗? 线缆有无损伤? 配线端子部盖好盖子了吗? 搬送用固定螺栓拆下来了吗? 控制盘的急停按钮管用吗? TP的急停按钮管用吗? 放开DEAD MAN SWITH 机器人停止吗? 动作时机器人没有发出异常声音吗? TOOL和机器人6轴部凸缘拧好了吗? 安全防护领域(逃避场所)确保好了吗? 机器人的可动范围围好围栏了吗? 围栏中是否没有除自己以外的人? 做好防止进入线内的准备了吗? 明确标记出自动运行中了吗?
【制造行业必备类】机器人点检操作指南知名品牌公司推荐
Designed: 作成
Page页数:
1/1
化(图D处)
图E处) 动正常(图F处) 处有无氧化层或炭化,两者连接紧密,外观完整。外壳是否断裂(图G
有金属屑堵塞。
Editor修定人
Date日期
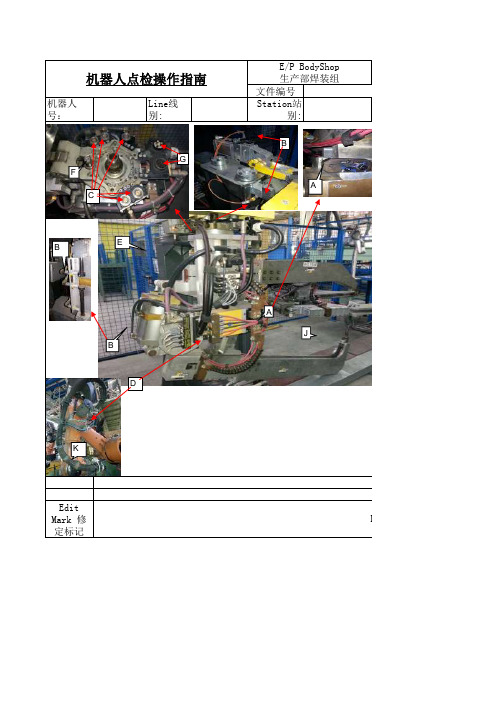
机器人点检操作指南
机器人 号:
Line线 别:
G F
C
B
E
E/P BodyShop 生产部焊装组 文件编号 Station站
别:
B
A
B D
A J
K
Edit Mark 修 定标记
Edit causation修定原因
Version&Date版 本&日期
Approved: 核准
Checked: 审核
Production Code生产代码:
C F G
I
Worker作业员:
操作指南: 检查焊枪挡块是否断裂(图A处) 检查焊枪传感器是否正常(图B处) 检查连接口各处密封应良好(图C处) 气缸动作是否顺畅、行程是否无异常
检查冷却水、高压空气软管检查无破损、老化(图D处)
作动焊枪检查上下电极杆是否对中(图J处)
检查换枪盘工具支架有无外伤、作动正常(图E处) 检查换枪盘定位销,锁紧单元有无外伤、作动正常(图F处) 检查换枪盘电气模块,信号模块插针与插孔处有无氧化层或炭化,两者 处) 查看换枪盘有无噪声异响 检查电机修磨器空气管路(图H处)有无破损 检查电机修磨器修磨器(图I处)修磨器应没有金属屑堵塞。 检查电机修磨器修磨器齿轮 检查电机修磨器有无异常声响 电缆保护套(图K处)是否破损脱落
MOTOMAN机器人日常点检项目书
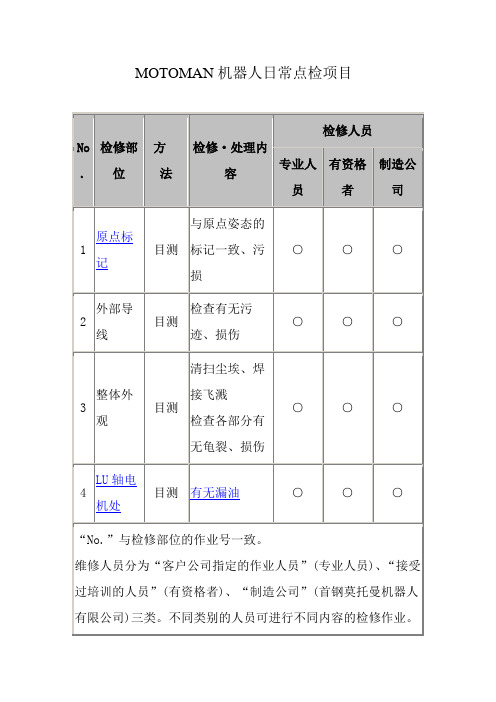
MOTOMAN机器人日常点检项目
【有无漏油】
发生油脂泄漏时,油脂可能侵入电机。
由于油脂泄漏引起电机故障时,请立刻与本公司联系。
详细说明:
1、原点标记在以下位置。
【准备的物品】无【作业时间:5 分】【步骤】
MOTOMAN机器人定期检查项目1、间隔1000小时检修:
详细说明:
(1)、【位置】
“底座螺栓”指地面或底座上的固定螺栓,有数处,如下图所示(4角各2个,共8个)。
【准备的物品】
【作业时间:5分】
(2)、【盖类螺栓检查】
【步 骤】
【位置】
【准备的物品】【作业时间:5分】【步骤】
(3)、【SLU轴电机插头插座的检查】【位置】在以下位置。
【准备的物品】无。
【作业时间:2 分】
【步骤】
(4)、【底座插座的检查】
【位置】在机器人背面下部。
【准备的物品】无。
【作业时间:2分】
【步骤】
2、间隔6000小时:补油。
打电话厂家进行维护。
3、间隔12000小时:换油。
打电话厂家进行维护。
4、间隔36000小时:更换机内导线(S,L,U,R,B,T轴)、XRC控制
柜机内电池。
5、油脂型号(Moly White RENo.00) S\L\U\R\B\T轴减速机用油,共
加油:约9500CC单台。
(理论值)
6、油脂型号(Alvania EP Grease2) 平衡杠齿轮用油共加油:约10CC
单台。
(理论值)
MOTOMAN机器人有限公司. 董会 2009.5.20.。
机器人检查的流程及方法
机器人检查的流程及方法Robots play a crucial role in the inspection process in various industries, as they can efficiently carry out repetitive and labor-intensive tasks with high precision and accuracy. 机器人在各行各业的检查过程中发挥着至关重要的作用,因为它们可以高效地执行重复和劳动密集型的任务,并具有高精度和准确性。
One common method for robot inspection is using sensors and cameras to detect defects or abnormalities in the products being inspected. 机器人检查的一种常见方法是使用传感器和摄像头来检测被检查产品中的缺陷或异常。
These sensors can range from simple proximity sensors to more advanced technologies such as vision systems, which can provide detailed images for analysis. 这些传感器可以从简单的接近传感器到更先进的技术,如视觉系统,后者可以提供详细的图像供分析。
In addition to visual inspections, robots can also be equipped with other tools and sensors to perform non-destructive testing, such asultrasonic testing or magnetic particle inspection. 除了视觉检查外,机器人还可以配备其他工具和传感器进行无损检测,如超声波检测或磁粒检查。
机器人操作规程
机器人操作规程
《机器人操作规程》
在现代社会中,机器人已经逐渐成为生产和服务领域中不可或缺的一部分。
然而,机器人在操作过程中需要遵循一定的规程,以确保安全和高效的工作。
以下是机器人操作规程的一些重要内容:
1. 操作人员必须接受专业的培训,了解如何正确地操作和维护机器人。
他们必须熟悉机器人的工作原理和操作界面,并且了解在遇到问题时应该如何应对。
2. 在操作机器人之前,必须进行全面的安全检查。
确保机器人的各个部件都处于良好的状态,并且没有损坏或松动的部件。
3. 在进行复杂或危险的操作时,必须配备专业的操作人员。
这些操作人员必须具有丰富的经验和技能,以确保机器人可以安全地完成任务。
4. 机器人的操作必须符合相关的法律法规和标准,包括安全规定、环保要求等。
在操作过程中,必须遵循相关的安全操作规程,以保障员工和环境的安全。
5. 在操作机器人时,必须随时注意机器人的运行状态,并及时发现并解决可能出现的问题。
一旦发现机器人运行异常,必须立即停止操作并进行维修。
总之,机器人操作规程是确保机器人安全和高效运行的重要保障。
只有严格遵守规程,我们才能发挥机器人的最大潜力,为人类社会的发展做出更大的贡献。
松下机器人点检指南
松下点检指南松下点检指南1、介绍1.1 目的1.2 适用范围1.3 定义和缩写2、点检前准备2.1 准备工具和设备2.2 检查点检记录表2.3 熟悉操作手册2.4 通知相关人员3、电源系统点检3.1 检查电源线连接情况3.2 检查电源开关和保险丝3.3 测试电源供应的稳定性3.4 检查电源线的磨损状况4.1 检查控制器连接情况4.2 检查网络连接4.3 检查控制器软件版本4.4 测试控制器功能4.5 检查控制器温度5、传感器系统点检5.1 检查传感器连接情况5.2 清洁传感器表面5.3 校准传感器5.4 测试传感器功能6、机械系统点检6.1 检查机械臂关节连接情况 6.2 清洁机械臂表面6.3 润滑关节6.4 检查机械臂运动范围6.5 检查机械臂刹车系统7.1 检查急停按钮功能7.2 测试安全光幕功能7.3 检查警示灯和声音报警装置7.4 检查安全门和锁定装置7.5 测试紧急停机功能8、日常维护和保养8.1 清洁外壳8.2 检查连接螺丝8.3 定期更换润滑剂8.4 更新软件版本附件:- 点检记录表法律名词及注释:1、:指能够执行预定任务的可编程多关节装置,通常用于自动化生产过程中的协作操作或替代人力劳动。
2、点检:指对进行定期的检查和维护,以确保其正常运行和安全性。
3、控制器:指控制运动和操作的设备,通常包括控制软件和输入/输出接口。
4、传感器:指用于感知和测量周围环境和状态的设备,例如光电开关、压力传感器等。
5、机械臂关节:指连接机械臂各个部分的可旋转连接点。
6、安全光幕:指由光电传感器组成的安全保护装置,用于检测周围是否有人或物体。
本文档涉及附件,请参考点检记录表进行实际操作并记录相关信息。
喷涂机器人点检作业指导书

第1 页,共 8页 发布/修订日期:2009年 4月18日一:开机前点检项目及方法1:涂料压力:检查油漆1~油漆13的压力表读数是否在0.6~0.8Mpa 。
2:空气压力:检查各气动柜上方空气入口压力表读数是否≥0.6Mpa 。
3:溶剂压力:换色阀溶剂压力:0.5~0.6Mpa ;注射器和杯外溶剂压力:0.2~0.3Mpa 。
第2 页,共 8页 发布/修订日期:2009年 4月18日4:工作原点:机器人工作原点指示灯是否点亮5:控制柜各连锁开关:检查是否所有连锁开关为ON 位置6:监控电脑:是否有报警第3 页,共 8页 发布/修订日期:2009年 4月18日7:触发开关:检查是否灵活可靠、是否清洁。
开关需处于直立状态(与隔栅板成90°),用手8:光电管:检查是否清洁、灵敏、无污染。
灵敏检查:自动开启后,用手挡一下光电管,机器人马上报警9:衣物:检查是否清洁、无杂物粘附第4 页,共 8页 发布/修订日期:2009年 4月18日10:喷杯、成型空气罩:检查是否清洁二:运行中点检项目1:换色:检查是否有污染。
1-1:检查车身上有无异色污染或溶剂污染1-2:检查喷杯是否清洗干净2:机械运动:检查有无异响、是否平稳。
自动喷涂中检查有无异响第5 页,共 8页 发布/修订日期:2009年 4月18日3:高压及电流:是否在正常范围内(高压<100KV ;电流<100UA)4:车型、颜色数据:监控显示与实际是否一致5:齿轮泵密封圈:是否漏漆第6 页,共8页发布/修订日期:2009年 4月18日三:周检项目1:阀组:是否灵活可靠打开,打开时有无延时1-1:依次打开换色阀;注射器;杯外清洗溶剂和空气,检查有无溶剂或空气出来。
1-2:依次排放油漆,检查有无油漆从喷嘴流出。
2:成形空气罩:检查是否清洁、成形孔无阻塞第7 页,共 8页 发布/修订日期:2009年 4月18日四:月检项目1:机器人外壳、机器人手臂内部:检查是否清洁、无杂物粘附2:涡轮总成:检查是否清洁、无杂物粘附3:各控制柜、XRC第8 页,共8页发布/修订日期:2009年 4月18日4:基座螺栓:用扳手检查无松动。
机械手点检表
序号点检方
法
12345678910111213141516171819202122232425262728293031
1目视
2
目视试操作
3试操作4目视
5目视耳听
6目视
9
目视
耳听
处置人
气管
吸盘
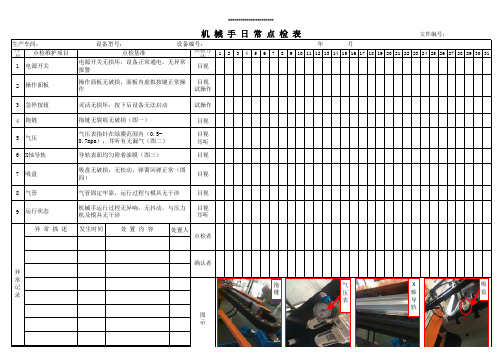
吸盘无破损,无松动,弹簧回弹正常(图
四)
气管固定牢靠,运行过程与模具无干涉
7 8
异常记录
目视
目视
点检者
确认者
图
示
运行状态
机械手运行过程无异响,无抖动,与压力
机及模具无干涉
异 常 描 述发生时间处 置 内 容
拖链拖链无裂痕无破损(图一)
气压
气压表指针在绿膜范围内(0.5-
0.7mpa);耳听有无漏气(图二)
X轴导轨导轨表面均匀附着油膜(图三)
电源开关
电源开关无损坏,设备正常通电,无异常
报警
操作面板
操作面板无破损,面板内虚拟按键正常操
作
急停按钮灵活无损坏,按下后设备无法启动
**********************
机械手 日 常 点 检表
生产车间: 设备型号: 设备编号: 年 月点检维护项目点检基准
拖链气
压
表
X
轴
导
轨
吸
盘
文件编号:
编制审核图一图二图三图四
批准
说明:“√”完好“Δ”异常,“×”待修“о”修好;。
机器人操作规程
机器人操作规程
机器人操作规程
1.安全规则及安全管理有那几项?
2.工作场所的安全预防措施和作业区域及设备的整洁有哪些?
3.示教过程中的安全预防措施操作前的安全检查的注意事项有哪些:
4.操作过程中有哪些安全预防措施?
5.电弧焊接时有哪些安全预防措施
一、填空
操作者平时操作时应注意的事项:
1、打开机器人总开关后,必须先检查机器人在不在(原点位置),
如果不在,请(手动跟踪机器人返到原点),严禁打开机器人总开关后,机器人不在原点时(按启动按钮启动机器人。
)
2、打开机器人总开关后,检查外部控制盒外部(急停按钮有没有
按下去,)如果按下去了就先打上来,然后(点亮示教盒上的伺服灯,)再去按启动按钮启动机器人,严禁打开机器人总开关后,外部急停按钮按下去生效时,按(启动按钮)启动机器人。
如果当外部急停按钮按下去生效时,按启动按钮启动机器人时,马上选择(手动模式把打开的程序关闭,)再选择自动模式,点亮伺服灯,按复位按钮让机器人继续工作。
3、在机器人运行中,需要机器人(停下来时,)可以按外部急停按
钮、暂停按钮、示教盒上的急停按钮,如需再继续工作时,可以(按复位按钮)让机器人继续工作。
4、在机器人运行时暂停下来修改程序的情况下,选择(手动模式)
后进行修改程序,当改完程序后,一定要注意程序上的光标必须和机器人现有的(位置一致),然后再选择自动模式,点亮伺服灯,按复位按钮让机器人继续工作。
5、关闭机器人电源前,不用按外部急停按钮,可以直接关闭机器
人电源。
6、当发生故障或报警时,请把(报警代码和内容记录下),以便向技术人员提供解决问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文件编号机器人号:Line线别:Station站别:
Edit
Mark 修
定标记机器人点检操作指南
Edi
E/P BodyShop 生产部焊装组A
A
B
B C
B
D
E
F
G
J
K
Version&Date版
本&日期
Approved:核 准
Edit causation修定原因
检查电机修磨器空气管路(图H处)有无破损
检查电机修磨器修磨器(图I处)修磨器应没有金属屑堵塞检查电机修磨器修磨器齿轮
检查电机修磨器有无异常声响
电缆保护套(图K处)是否破损脱落检查冷却水、高压空气软管检查无破损、老化(图D处)
作动焊枪检查上下电极杆是否对中(图J处)
检查换枪盘工具支架有无外伤、作动正常(图E处)
检查换枪盘定位销,锁紧单元有无外伤、作动正常(图F处检查换枪盘电气模块,信号模块插针与插孔处有无氧化层处)
查看换枪盘有无噪声异响
操作指南:
检查焊枪挡块是否断裂(图A处)
检查焊枪传感器是否正常(图B处)
检查连接口各处密封应良好(图C处)
气缸动作是否顺畅、行程是否无异常
Production Code生产代码:Worker作业员:Checked:审 核C F G
H
I。