转向器英文文献翻译
机械类汽车转向系统外文文献及翻译

1 IntroductionThe key task for the automobile industry and its suppliers in future lies in speedily developing and implementing ecologically sound and economically justifiable mobility systems. Light metals such as aluminum and magnesium along with glass and carbon fiber reinforced materials, ceramics and composites have opened up the potential for considerable weight reduction and for "green" vehicle concepts which can be realized economically. Aluminum in particular can provide the impetus for new designs for the next millennium. Decades ago, the use of aluminum in auto construction was seen as an "experiment"; Today it is a vital factor in reducing weight and thus lowering fuel consumption.The average passenger car today contains 60 to 70 kg of aluminum, and current developments point to a doubling of this amount in the next few years. Motor vehicles both now and in future must meet requirements for: greater performance, greater safety, comfort, low pollution. Lightweight construction is not just about reducing weight; it is a question of -striking the right balance between reduced weight and structural efficiency. In vehicle construction this normally means making the best use of the generally very tight space available for individual components so as to allow weight to be minimized while still meeting all stiffness, strength, natural frequency or acoustical requirements. To achieve this, stresses must be distributed throughout the structure as evenly as possible. Modern numerical analysis methods such as FEA allow a very detailed analysis of system behavior, provide cost-efficient support for the complex process of optimization and thus make a huge contribution to advances in lightweight construction. Packaging, safety considerations, reproducibility and price place restrictions on the degree of weight reduction achievable.The broad range of expertise available to Krupp Presta AG allows the company to analyze customer specifications for steering systems and provide appropriate solutions.2 Requirements to be met by steering systemsThe steering is an important part of the feel of a car. The steering system should make driving an enjoyable experience with no unpleasant vibration from the road surface while guaranteeing the required hand- sing. It is also important that high safety requirements be met, both under normal conditions and in crash situations. The key criteria for the steering system are thus as follows:rolling friction, torsional stiffness /strength, Damping, temperature, corrosion, durability / fatigue, weight. Crash kinematics and energy absorption steering column requirements:natural frequency / stiffness, mass, damping, space, strength (crash, misuse), ergonomics, handling, acoustics, crash kinematics and energy absorption. Other basic conditions:interfaces with adjacent components, installation, joining techniques, price.3 Materialsmaterial light weighting can be achieved by using either stronger or lighter material. When stiffness or natural frequency are Important sizing criteria, low density materials with a high modulus of elasticity by quired. Non-exotic materials must be selected which are readily recyclable, low in price and display good durability.Further requirements are set by the manufacturing and joining processes. Steel, aluminum, magnesium and a variety of plastics are the materials of choice for steering systems.Low specific gravity, high corrosion resistance, low fabricating costs, high energy absorption and good recycle ability make aluminum a favored light weighting material. Owing to its high energy content, up to 90% of the aluminum used in auto construction can be recycled (intelligent design / no mixing with other materials). The favorable energy balance of aluminum puts it at a great advantage over many other materials.In environmental terms aluminum scores highly. The large amounts of primary energy required to make raw aluminum are offset over the lifetime of the vehicle. Composites could also become a very attractive proposition on account of their extreme stiffness, low weight and energy absorption capabilities. At present, howler, price is a problem, as are joining and quality assurance.4 Reducing component weightA focused strategy to reduce component weight requires a lightweight approach to design (force distribution, stresses), material (material selection), specifications (modified, realistic specifications)Key factors in lightweight design include [1]: force flows, material properties, ambient conditions ® safety requirements, reliability of joints, manufacture ability. Practical experience has shown that car makers' specifications based on steel need to be revised for lightweighting. Requirements valid for a steel steering shaft, for example, can result in severe oversizing of an aluminum shaft. Reducing component weight requires material compatible designs combined with material- compatible specifications.5 Lightweight componentsAs part of its development program Krupp Presta is replacing conventional steel steering components such as steering rods , shafts or forks with corresponding aluminum components produced by new processes. Weight savings of 20-30% are achievable depending on the basic conditions stipulated by the customer. Aluminum and magnesium die castings are already being used in steering columns , and further opportunities for weight reduction are being investigated. The lightweight steering column (Fig. 1) produced by Krupp Presta for the Audi A6 is a good example. By using magnesium die castings it has been possible to limit the weight of the steering column to just 5kg, a reduction of 15-20% over conventional (steel) designs.6 Steering column designExperience has shown that it is possible to design steering columns for cars more or less on the basis of their natural frequency alone. Additional engineering work may be required to design critical parts which must not break in the case of a crash or misuse (e.g. theft). The main task when engineering a steering column is thus to achieve the highest possible natural frequencies while minimizing weight. Low-stiffness components are being analyzed and refined in an effort to achieve uniform loading of the structure. In solving this task, use is made of numerical methods such as FEA. The structure is divided into finite elements which are characterized by specific deformation assumptions. Using FE analysis it is possible to examine complex structures, analyze sensitivities and links, discuss variations or ways of making improvements and optimize the structure numerically. Topological optimization is carried out for the analysis of low-stress areas and for the basic design of ribs and beads. CAD geometrydata are processed in an FE pre-processor. Correct modeling of the following is essential, individual parts, stiffness, contact faces, kinematics mass. Modeling is followed by computation and evaluation of the data obtained. The deformation energy is a global measure for assessing stresses. Normalizing the element deformation energy by the element mass provides information on the stresses acting on the element relative to its mass. The kinetic energy is regarded as the influence of vibrating masses which have a negative effect on the natural frequency of the steering column. By evaluating stress and strain conditions, highly localized weak points or high-stress areas can be identified.7 ConclusionsExisting technologies must be continuously adapted and improved in line with the requirements of the auto industry. Systematic weight reduction is a major challenge and requires close cooperation between vehicle manufacturers and suppliers. Materials, fabricating and joining technologies must be further refined. One prerequisite for the continuing success of Krupp Presta is the flexibility to react to customer wishes and requirements.Reference[1] Klein, B.:Leichtbau-Konstruktion. Berech- nungsgrundlagen und Gestaltung.Braunschweig: Vieweg, 1997一、简介一、简介 汽车工业及其供应商,在未来的关键任务在于迅速制定和实施无害生态和经济上合理流动系统。
循环球式转向器外文文献

Steering system profileAlong with automobile electronic technology swift and violent development, the people also day by day enhance to the motor turning handling quality request. The motor turning system changed, the hydraulic pressure boost from the traditional machinery changes (Hydraulic Power Steering, is called HPS), the electrically controlled hydraulic pressure boost changes (Elect ric Hydraulic Power Steering, is called EHPS), develops the electrically operated boost steering system (Elect ric Power Steering, is called EPS), finally also will transit to the line controls the steering system (Steer By Wire, will be called SBW).The machinery steering system is refers by pilot's physical strength achievement changes the energy, in which all power transmission all is mechanical, the automobile changes the movement is operates the steering wheel by the pilot, transmits through the diverter and a series of members changes the wheel to realize. The mechanical steering system by changes the control mechanism, the diverter and major part changes the gearing 3 to be composed.Usually may divide into according to the mechanical diverter form: The gear rack type, follows round the world -like, the worm bearing adjuster hoop type, the worm bearing adjuster refers sells the type. Is the gear rack type and follows using the broadest two kinds round the world -like (uses in needing time big steering force).In follows round the world -like in the diverter, the input changes the circle and the output steering arm pivot angle is proportional; In the gear rack type diverter, the input changes the turn and the output rack displacement is proportional. Follows round the world -like the diverter because is the rolling friction form, thus the transmission efficiency is very high, the ease of operation also the service life are long, moreover bearing capacity, therefore widely applies on the truck. The gear rack type diverter with follows round the world -like compares, the most major characteristic is the rigidity is big, the structure compact weight is light, also the cost is low. Because this way passes on easily by the wheel the reacting force to the steering wheel, therefore has to the pavement behavior response keen merit, but simultaneously also easy to have phenomena and so on goon and oscillation, also its load bearing efficiency relative weak, therefore mainly applies on the compact car and the pickup truck, at present the majority of low end passenger vehicle uses is the gear rack type machinery steering system.Along with the vehicles carrying capacity increase as well as the people to the vehicles handling quality request enhancement, the simple mechanical type steering system were already unable to meet the needs, the power steering system arise at the historic moment, it could rotate the steering wheel while the pilot to provide the boost, the power steering system divides into the hydraulic pressure steering system and the electrically operated steering system 2kinds.Hydraulic pressure steering system is at present uses the most widespread steering system.The hydraulic pressure steering system increased the hydraulic system in the mechanical system foundation, including hydraulic pump, V shape band pulley, drill tubing, feed installment, boost installment and control valve. It with the aid of in the motor car engine power actuation hydraulic pump, the air compressor and the generator and so on, by the fluid strength, the physical strength or the electric power increases the pilot to operate the strength which the front wheel changes, enables the pilot to be possible nimbly to operate motor turning facilely, reduced the labor intensity, enhanced the travel security.The hydraulic pressure boost steering system from invented already had about half century history to the present, might say was one kind of more perfect system, because its work reliable, the technology mature still widely is applied until now. It takes the power supply by the hydraulic pump, after oil pipe-line control valves to power hydraulic cylinder feed, through the connecting rod impetus rotation gear movement, may changes the boost through the change cylinder bore and the flowing tubing head pressure size the size, from this achieved changes the boost the function. The traditional hydraulic pressure type power steering system may divide into generally according to the liquid flow form: Ordinary flow type and atmospheric pressure type 2 kind of types, also may divide into according to the control valve form transfers the valve type and the slide-valve type.Along with hydraulic pressure power steering system on automobile daily popularization, the people to operates when the portability and the road feeling request also day by day enhance, however the hydraulic pressure power steering system has many shortcomings actually: ①Because its itself structure had decided it is unable to guarantee vehicles rotates the steering wheel when any operating mode, all has the ideal operation stability, namely is unable simultaneously to guarantee time the low speed changes the portability and the high speed time operation stability;②The automobile changes the characteristic to drive the pilot technical theinfluence to be serious; ③The steering ratio is fixed, causes the motor turning response characteristic along with changes and so on vehicle speed, transverse acceleration to change, the pilot must aim at the motor turning characteristic peak-to-peak value and the phase change ahead of time carries on certain operation compensation, thus controls the automobile according to its wish travel. Like this increased pilot's operation burden, also causes in the motor turning travel not to have the security hidden danger; But hereafter appeared the electrically controlled hydraulic booster system, it increases the velocity generator in the traditional hydraulic pressure power steering system foundation, enables the automobile along with the vehicle speed change automatic control force size, has to a certain extent relaxed the traditional hydraulic pressure steering system existence question.At present our country produces on the commercial vehicle and the passenger vehicle uses mostly is the electrically controlled hydraulic pressure boost steering system, it is quite mature and the application widespread steering system. Although the electrically controlled hydraulic servo alleviated the traditional hydraulic pressure from certain degree to change between the portability and the road feeling contradiction, however it did not have fundamentally to solve the HPS system existence insufficiency, along with automobile microelectronic technology development, automobile fuel oil energy conservation request as well as global initiative environmental protection, it in aspect and so on arrangement, installment, leak-proof quality, control sensitivity, energy consumption, attrition and noise insufficiencies already more and more obvious, the steering system turned towards the electrically operated boost steering system development.The electrically operated boost steering system is the present motor turning system development direction, its principle of work is: EPS system ECU after comes from the steering wheel torque sensor and the vehicle speed sensor signal carries on analysis processing, controls the electrical machinery to have the suitable boost torque, assists the pilot to complete changes the operation. In the last few years, along with the electronic technology development, reduces EPS the cost to become large scale possibly, Japan sends the car company, Mitsubishi Car company, this field car company, US's Delphi automobile system company, TRW Corporation and Germany's ZF Corporation greatly all one after another develops EPS.Mercedes2Benz 和Siemens Automotive Two big companies invested 65,000,000 pounds to use in developing EPS, the goal are together load a car to 2002, yearly produce 300 ten thousand sets, became the globalEPS manufacturer. So far, the EPS system in the slight passenger vehicle, on the theater box type vehicle obtains the widespread application, and every year by 300 ten thousand speed development.Steering is the term applied to the collection of components, linkages, etc. which allow for a vessel (ship, boat) or vehicle (car) to follow the desired course. An exception is the case of rail transport by which rail tracks combined together with railroad switches provide the steering function.The most conventional steering arrangement is to turn the front wheels using a hand–operated steering wheel which is positioned in front of the driver, via the steering column, which may contain universal joints to allow it to deviate somewhat from a straight line. Other arrangements are sometimes found on different types of vehicles, for example, a tiller or rear–wheel steering. Tracked vehicles such as tanks usually employ differential steering — that is, the tracks are made to move at different speeds or even in opposite directions to bring about a change of course.Many modern cars use rack and pinion steering mechanisms, where the steering wheel turns the pinion gear; the pinion moves the rack, which is a sort of linear gear which meshes with the pinion, from side to side. This motion applies steering torque to the kingpins of the steered wheels via tie rods and a short lever arm called the steering arm.Older designs often use the recirculating ball mechanism, which is still found on trucks and utility vehicles. This is a variation on the older worm and sector design; the steering column turns a large screw (the "worm gear") which meshes with a sector of a gear, causing it to rotate about its axis as the worm gear is turned; an arm attached to the axis of the sector moves the pitman arm, which is connected to the steering linkage and thus steers the wheels. The recirculating ball version of this apparatus reduces the considerable friction by placing large ball bearings between the teeth of the worm and those of the screw; at either end of the apparatus the balls exit from between the two pieces into a channel internal to the box which connects them with the other end of the apparatus, thus they are "recirculated".The rack and pinion design has the advantages of a large degree of feedback and direct steering "feel"; it also does not normally have any backlash, or slack. A disadvantage is that it is not adjustable, so that when it does wear and develop lash, the only cure is replacement.The recirculating ball mechanism has the advantage of a much greater mechanical advantage, so that it was found on larger, heavier vehicles while the rack and pinion was originally limited to smaller and lighter ones; due to the almost universal adoption of power steering, however, this is no longer an important advantage, leading to the increasing use of rack and pinion on newer cars. The recirculating ball design also has a perceptible lash, or "dead spot" on center, where a minute turn of the steering wheel in either direction does not move the steering apparatus; this is easily adjustable via a screw on the end of the steering box to account for wear, but it cannot be entirely eliminated or the mechanism begins to wear very rapidly. This design is still in use in trucks and other large vehicles, where rapidity of steering and direct feel are less important than robustness, maintainability, and mechanical advantage. The much smaller degree of feedback with this design can also sometimes be an advantage; drivers of vehicles with rack and pinion steering can have their thumbs broken when a front wheel hits a bump, causing the steering wheel to kick to one side suddenly (leading to driving instructors telling students to keep their thumbs on the front of the steering wheel, rather than wrapping around the inside of the rim). This effect is even stronger with a heavy vehicle like a truck; recirculating ball steering prevents this degree of feedback, just as it prevents desirable feedback under normal circumstances.The steering linkage connecting the steering box and the wheels usually conforms to a variation of Ackermann steering geometry, to account for the fact that in a turn, the inner wheel is actually traveling a path of smaller radius than the outer wheel, so that the degree of toe suitable for driving in a straight path is not suitable for turns.As vehicles have become heavier and switched to front wheel drive, the effort to turn the steering wheel manually has increased - often to the point where major physical exertion is required. To alleviate this, auto makers have developed power steering systems. There are two types of power steering systems—hydraulic and electric/electronic. There is also a hydraulic-electric hybrid system possible.A hydraulic power steering (HPS) uses hydraulic pressure supplied by an engine-driven pump to assist the motion of turning the steering wheel. Electric power steering (EPS) is more efficient than the hydraulic power steering, since the electric power steering motor only needs to provide assist when the steering wheel is turned, whereas the hydraulic pump must run constantly. In EPS the assist level is easily tunable to the vehicle type, road speed, and even driver preference.An added benefit is the elimination of environmental hazard posed by leakage and disposal of hydraulic power steering fluid.An outgrowth of power steering is speed adjustable steering, where the steering is heavily assisted at low speed and lightly assisted at high speed. The auto makers perceive that motorists might need to make large steering inputs while manoeuvering for parking, but not while traveling at high speed. The first vehicle with this feature was the Citroën SM with its Diravi layout, although rather than altering the amount of assistance as in modern power steering systems, it altered the pressure on a centring cam which made the steering wheel try to "spring" back to the straight-ahead position. Modern speed-adjustable power steering systems reduce the pressure fed to the ram as the speed increases, giving a more direct feel. This feature is gradually becoming commonplace across all new vehicles.Four-wheel steering (or all wheel steering) is a system employed by some vehicles to increase vehicle stability while maneuvering at high speed, or to decrease turning radius at low speed.In most four-wheel steering systems, the rear wheels are steered by a computer and actuators. The rear wheels generally cannot turn as far as the Alternatively, several systems, including Delphi's Quadrasteer and the system in Honda's Prelude line, allow for the rear wheels to be steered in the opposite direction as the front wheels during low speeds. This allows the vehicle to turn in a significantly smaller radius — sometimes critical for large trucks or vehicles with trailers.译文随着汽车电子技术的迅猛发展,人们对汽车转向操纵性能的要求也日益提高。
中英文文献翻译—转向器的简单介绍
中英文文献翻译—转向器的简单介绍附录Hyundai Motor on the stcering control of the request is lightweight,safe,reliable,and should have sufficient life. In order to meet these requirements,the design of the steering gear should have a reasonable transmission ratio characteristics,the correct gap cating together,a higher transmission efficiency,sufficient rigidiy and strength.If the steering gear in the design is reasonable,then the product is good and bad parts of the key issucs of manufacturing and assembly.How to control the quality of the product?The key problem is that a reasonable detection methods,the key to strictly control the passing rate of time,such products will be able to guarantee the quality of parts and components.First of all,the quality of shifting ASSY,should control the assenmbly and to ensure that turning the steering shaft torque and rotational axis and the transmission gap between components.Followed by testing the performance of steering gear,steering gear must also be adopted by all types of test-bed to verify the established angle transmission ratio,transmission efficiency,rotational torque,rigid.In addition to examination other than the above-mentioned steering performance,but also in the pilot stage of its life nuclear reliability and life expectancy that is static torsion test:a thin red hammer,hit test,fatigue life test.To determine whether the quality of the product in hand national standards.Noise from the steering angle repair cream,which is also a test method to detect and can learn from the J class machincry manufacturing industry in China “in the past only means to recognize the importance of detection,and the lack of”lack of testing and testing of the poorlaw awareness.So have some of the parts is a qualified products I materials,and assembly of products from the pilot test proved to be defective,or:The test can verify the quality of products and design for the steering gear (1) the accuracy of parts of the foot only, finish second,two-phase the location of the elite“Measuring the content of L steering shaf t loaded journal bearings.Department feet inch accuracy and smoothness,anti-worm or worm-inch accuracy.smoothness and surface hardness and magnetic---for testing;steering vertical axis arm journal dimensional accuracy and smoothness, the worm wheel roller bearing of the journal center hole distance,wheel bearing and the journal” hole angle from the Chinese side,the block size,finish and degree of asymmetry;circulating ball tooth-type radial fan,big-law length,journal hardness,the magnetic;browser to Min Xuan cochlear aperture wheel size precision,smoothness,tooth surface roughness,intermediate thick teech,tooth,tooth degree ofasymmetry; ball rolling circle diameter,smooth,cylindrical roller Road”degree of accuracy and bias,raccway adjacent pitch error,cumulative error section of grass lines and sub-racj section from Rolling Road Center,rack section Road center line and the roll of injustice;carburizing layer thickness,hardn ess’magnetic flaw detection;ahift steering shaft shell aperture,roughness,different degree of heart;shift towards vertical axis aperture arm flying finish,different degree of heart;chaos and stecring shaft steering arm hole down the center distance,steering shaft-hole axes and steering arm hole down the center line of the non-verticality.(2) parts of cleanliness.Detection of the site is turning-browser shell surface and the surface parts.Detection method is to use cleaning fluid to clean parts,and then the cleaning fluid with impurities,and vacuum membranc leaching;further 120 weeks of petrol industrial solvents the menbranc will be washed with inpurities.To be volatile after the membranc cleaning fluid,together with the impurities from weighing with the magne cellophane packets are sorted in the iron impurities said the weight of a scrap-iro, The iron filings and then 40 times on the microscope with a disability in most dogs measured particle size.(3)assembly of the leakage.. Does not allow any leakage of the phenomenon of steering.Because of internal lubricants in the steering gear is used to turn parts lubricated friction pair,and if as a result of damage caused by leakng seals,lubrication will be affected; resulting in increased friction and wear parts and reduce the life span of steering gera;transminssion efficiency at the same time will lower.The use of conventional vibration and temperature 40 under the conditions of inspection,the shell and shell cap shaft oil scal joints as well as whether the spill.,and water to observe whether there are leakages.(4) after a good tune stecring assembly should check the technical requirements flexible and comfortable when turning the steering wheel,there is no axial gap I turn the steering wheel of the total value of the number required to turn around a few cars in line with the original request.Steering gear shife, also known as machine,machine,machine direction.which is steering the most important parts. Its role ie to increase the spread to turn steering wheel and transmission mechanism to change the direction of power transfer.Hydraulic Steering Hydraulic steering vehicles are windelyused in marine hydraulicsteering and rudder.Drivers can be used through its ability to manipulate smaller shift power to achieve greater control and performance of safe,reliable,flexible manipulation,light.The manipulation of steering is hydraulic,that is in the steering column and steering wheel there is no mechanical connection between the steering gear is between the fuel tank and steering hydraulic pipes or hoses link.When turning the steering wheel,steering wheel rotation in accordance with the relative proportion of transport fuel,the fuel tank directly into the corresponding control side,while the other side of the oil back to tank.BZZ steering is a switch-type full-hydraulic steering valve with the following characteristics:the elimination of mechanical linkage device,the host can reduce costs,provide a reliable,lightweight structures,manipulation of a flexible lightweight,safe,reliable,and can be very small continuous torque stepless control of rotation, provided to the control loop,as well as a wide range of host size choice,able to shift and a variety of pumps and hydraulic supply system.Steering by the structure can be divided into many types.History,there have been many forms of steering,there is currently more commonly used rack and pinion,worm means crank pins,recycling the ball-rack fan gear type,recycling the ball crank pins means,such as worm-type wheel.The second,fourth,respectively, is the first,the third form of the deformation,and the worm wheel is even more rare type.If the form in accordance with assistance,but also can be divided into mechanical(no help),and power-style(with help) two types of power steering which can be divided into pressure andmotivation,hydraulic-power, Electric power-type,electro-hydraulic power types of blocks.It is a rack and pinion of steering one of the most common.The basic structure is a pair of mutually meshing rack and pinon.Pinon steering drive shaft rotates, rack linear motion would be done. In some cases,directly driven by the rack cross-bar,you can make of steering wheel shift. So,this is one of the most simple steering. Its advantage is simple structure,low-cost,steering sensitivity,small size,can be directly cross-link.In widely used vehicle.It is a worm for the active parts,crank pin for the steering gear follower.Worm has a trapezoidal thread,referring to a finger-shaped pin with tapered bearings in the crank bearings,the crank shaft and the shift into one arm.Shifted through steering wheel rotating worm,helical worm embedded in the cone-shaped slot means the marketing side of the rotation,the crank shaft and the shift into one arm.Shifted through steering wheel rotating worm,helical worm embedded in the cone-shaped slot means the marketing side of the rotation,the side rocker shaft to do around the shifted are movement,thereby stimulating and steering crank arm swing down and then turning to make shift transmission wheel deflection.This steering is usually used to turn power on a larger truck.Circulating ball-type:This device is turned by the gear mechanism from the steering wheel to slow down the rotation of power,so that the rotation of steering wheel movement into rotary movement of the turbine worm,ball screw and nut holding the ball engagement,which Ball screw linear motion into rotary movement,with the fan-shaoed nut meshing gears,linear motion into rotary movement,with the fan-shaped nut meshing gears,linear motion into rotary movement,with the fan-shapednut meshing gears,linear motion into rotary movement again to shake the rod arm,link arm moving again so that even the bar and cross bar to do a straight-line movement to change the wheels direction.This is a classical institutions,most modern cars no longer have to use,but the way was the latest by the application of power steering device.It is equivalent to the principle use of nuts and bolts in the rotation process of relative movement,and in between the thread and thrend the ball into the folder to reduce the resistance,all the ball,both connected in a closed loop of the spiral curve rolling ball club is named after the cycle.Hydraulic rack and pinion steering gear is relative to the case of rack and pinion steering gear machinery, mainly to increase the steering pump,steering oiler,steering pineline, steering valve,steering components,suan as fuel tanks,with a view to improve the pilot hand,the purpose of increasing power steering of the steering device.After 10 years of internal development,has become a mature R&D and manufacturing technology manufacturers have Yubei Koyo Steering Gear Co.Ltd.and other enterprises.With the rapid development of automobile industry,as well as for comfort,safety and continuous improvement in performance,steering systems are also changing with the advance of technology.For the time being,electric power steering systems is turning the forefront of the industry rescarch projects,in accordance with its distribution of the form of string can be divided into power,gear Power,power rack,power bar,the form of electro-hydraulic power. Ago in some sci-fi movies of the unmanned aircraft can occur,such as unmanned acrial vehicle is now a reality,steering systems are moving in the direction of the development of more advanced,such as rescarch anddevelopment from Japan JTEKT advanced by the steer-by-wire systems.In this paper,choice-bassed recycling the ball GX1608A gear-steering rack as a research topic,its main contents are: knowledge of automotive steering gear,ball-type steering gear cycle of the main paramenters and design choices.Design also includes the shift rocker shaft,involute spline,fan gear shaft and screw shaft design and verification.According to its own independent study completed by the steering shaft and screw shaft rocker design and verification,in other parts of the network,as well as through the school library to collect relevant information and fax to the future,in the papers have used information the mark.The design has been through a total of about 16 Chinese and foreign-related literature,and learn from the relevant parts of which the essence of the final design of the times.Because of its limited ability to learn and,I urge teachers and experts have pointed out that less than one.中文现代汽车对转向器的要求是操纵轻便,安全、可靠、,并应具有足够的使用寿命。
转向系统外文文献翻译、中英文翻译、外文翻译

使用的弹簧越硬对角线的重量转移效果也会越明显因为这个是几何效应。每个车轮被抬起(或者下落)的距离是恒定的但是重量抬起量和底盘侧倾角是前后侧倾刚度的作用结果。这个对角线的载荷转移可以通过把车放在秤上和定位板上来测量。
记住在实际比赛中前轮并没有转过很大的角度,除非是非常紧的发夹弯。例如,在一个半径是100英尺(时速在40-50英里)的弯,一个10英尺的轴距的中性转向车辆转弯时前轮只需要转过0.1rad(5.7°)(转向传动比是16:1时方向盘的转角大概在90°)。
1.当主销偏距是正的时(一般的车都是正主销偏距,如图19.1中一样)那车轮转离中心位置的时候车会有一个抬升效果。主销内倾角偏离竖直平面越大前轮转向时车被抬起的效果越明显。不管车轮往哪个方向转都会是一个抬升的效果,除非主销是完全垂直的。这个效果只有在主销后倾角为零时才是两边对称的。见后面关于主销后倾角部分。对于一个给定的主销内倾角来说,主销偏距越大转向时的抬升量也越大。
2.主销内倾角和主销偏距将车子前端抬起的效果对于自身来说是有助于低速转向的。在高速转向时,只要有主销后倾拖距就可能会掩盖掉转向时抬升和下落的效果。
3.主销内倾角影响转向时车轮的外倾角特性。如果主销向内倾斜(主销上端倾向车辆中心)当车轮转向的时候,车轮上端将会向外倾斜,趋向正的车轮外倾角。左右转向都会导致正的车轮外倾。如果跑道有比较紧的弯这个作用效果是比较小但却是有重要意义的。
转向器基础知识中英文

转向器基础知识中英文转向器基本原理介绍Fundamental Principles of Steering Gear 目录Contents一、汽车液压动力转向系统的组成I . Hydraulic power steering system二、循环球动力转向器基本原理II . Recirculating Ball Steering Gear三、齿轮齿条转向器基本原理III .R&P Power Steering Gear四、转向系统发展的先进技术IV . Advanced T echnology of Steering System五、我厂的技术优势及特点V . Our Advantages for developing Technology六、先进驾驶辅助系统ADAS Advanced Driver Assistant System汽车液压转向系统的组成Hydraulic Power Steering System汽车转向系统的组成Steering System汽车的跑、转、停是它的基本性能,他们中的一个重要机能则由转向装置来承担。
Basic capability of vehicle is to run, turn or stop. Turning device assumes this responsibility.机械转向系统Manual Steering Gear 动力转向系统Power Steering Gear汽车液压动力转向系统的组成Hydraulic Power Steering System 方向盘及管柱、中间轴Steering Wheel, Column and Intermediate Shaft转向器及摇臂Steering Gear and Pitman Arm 油泵Pump 油罐Reservoir 油管Pipe支架及其它附件Bracket and Other Accessories 拉杆系统Linkage 主销及车轮Pin and Wheels1-方向盘Steering Wheel 2-中间传动轴Intermediate Shaft 3-进油管Inlet Pipe4-回油管Outlet Pipe 5-油罐Reservoir 6-油泵Pump 7-转向器Steering Gear8-摇臂Pitman Arm 泵与油管组件Pump and Pipe Assembly 油泵Pump高、低压油管High and low Pressure Pipes 油箱Reservoir 回油管Outlet Pipe 油泵Pump循环油管Recycle Pipes 进油管Inlet Pipe R&P式油压动力转向器R&P Power Steering Gear转阀式循环球动力转向器基本原理Recirculating Ball Power Steering Gear转阀式动力转向器简介General Overview转向器是构成汽车转向系统的主要部件之一,由于特殊的作用,在性能和可靠性方面要求苛刻。
车辆工程转向机构中英文对照外文翻译文献
中英文对照外文翻译文献(文档含英文原文和中文翻译)原文:The Track Vehicle Changes Direction Research Present Condition and DevelopmentTrends of The Organization1 change direction the research present condition of the organizationDifferent classification in basis method, the track vehicle changes direction organization can according to vehicle is in change direction process the power flows of deliver the way is divided into the single power flows to changedirection the organization to flow to change direction the organization with a power, and also can according to in change direction process two the sport of side trackses have no the contact but is divided into the independent type change direction the organization with bad soon the type changes direction the organization.1.1 single powers establish a certain changing direction the organization after flowing change direction the single power in organization flow to change direction the general structure in organization method is at became soon the organization, is the most simple method to constitute track vehicle change direction to spread to move.The single power flows to change direction the organization to change direction the organization most in brief, among them most in common usely change direction the clutch, single bad soon the machine, double is bad soon the machine, planet changes direction organization etc..Change direction the clutch[1,2] is all a friction that several types rub the clutch, depending the friction surface to deliver to turn the , being the separation some on changing direction the clutch laterally, can reduce or cut off that side drive a round delivers of turn the make vehicle changed direction.Change direction the size of the radius from drive a decrease for spreads to turn the measures namely the degree that clutch separate decides.Change direction the clutch is simple because of the construction, manufacturing convenience, got the extensive application on the small scaled track in inside in earlier period type tractor, bulldozer.But because its manipulate the sex bad, produce the efficiency low, can consume bigger, enlarge continuously along with the track vehicle power, change direction the application of the clutch will suffer certainly of restrict.SingleBad soon the machine changes direction the organization[2,3] can make vehicle several why the speed of the center position still keeps in change direction process the original driving the car straightly is soon, being a When the complete system in side move, change direction the radius over small, but another side track speed over high, change direction the Cape speed over big, for this reason a power for needing changing direction power very bigly, would outrunninggenerally launching machine restrict, if the pilot keep on changing direction, have a little bit the immodesty and then will make launch the machine fire, as a result can depend to slip to whet, using than the greater half path changes direction, or pole is not fair and softly break to change direction continuously with the lesser half path.Therefore this kind of is single bad soon the machine change direction the organization to no longer adopt almost now.The speed that a speed for differing soon machine changing direction organization[3,4] can making track vehicle at changing direction slowly soon side track lowering is equal to the fast side track the increment, the for this reason vehicle changes direction of average speed and straightly the speed that drive same alike.But because a variety for badly soon machine can't completely system moving first side track, vehicle can't originally changing direction, and changing direction radius scope has no usage to change direction the clutch big, changing direction the going smoothly worse.While changing direction, the fast side track accelerates, therefore launching the affixture of the machine carry the ratio adoption change direction the clutch big.The double is bad soon the machine be constituted by wheel gear of change direction the organization, with change direction the clutch compare the spare parts number little, bear to whet the sex good, the life span is longer.The planet changes direction the organization[4,5] moves with the system from a planet a department the machine constitutes.The operation planet the system on the organization moves the machine can change two sides drives the round drives the dint size make vehicle changed direction.It is that type of to change direction the organization opposite in change direction the clutch change direction the organization can deliver the bigger changing direction the dint , can realize an athletic and fixed stalk wheel gear organization fall through of two free a planet for of flat-out decomposition with synthesizing, planet organization a three dollar as have the bad relating to soon; change direction the organization to much order to deliver the motive, and the internal path in organization faces the dint mutually equilibrium.But is complicated because of its construction, only industry in big power tractor, bulldozer and other heavy type vehicle last application.Single weakness thatpower change direction is obvious, vehicle only contain several fix of change direction the radius, press to rule not of change direction When the radius change direction, want to is slipped by friction a piece to whet to realize, and is hard to get the stability change direction the radius accurately; the next in order in change direction process rub a dollar piece of violent slip to whet to will bring to have fever with wear away, make spread to move the efficiency lower, especially in the big power change direction work appearance next, would exsit the bigger power lose, with the result that often need to be declined to change direction soon; moreover, the violent friction also make easy damage in organization, cause the work dependable bad, the life span lower.1.2 pairs of powerses flow to change direction the organization after launching machine, will launch the machine power be divided in to become soon with change direction two roads be juxtaposed to deliver, ising a double of powers to flow to change direction the organization.A power flows to change direction the organization will used for keeping the pushes forward of become soon the organization is different from result in leftly, the right side track speed differs of change direction the organization to be juxtaposed in spread move department, change direction the organization when the vehicle keeps the did not result in twoth the speed of side trackses are bad, while changing direction, became to flow each file of offering soon to drive the speed straightly with change direction the organization results in of two the speed of side trackses differ to remit to flow, realizing the vehicle change direction.(1)the machine type a power flow to change direction the organization to flow the foundation top that change direction the organization to appear at the earliest stage in the single power of was a machine to kept the with changed direction two powers flowed all from machinery to realized type a power to flowed to change direction the organization[3].It is this kind to change direction the organization main from two become soon box( a lord become soon the box, a cent moves a box of), the planet wheel gear organization, clutch moves with the planet organization system the machine constitutes, the single power flows to change direction in changing direction function the organization has the very bigincreasing, but it still change direction the radius is to have the class.The file is more low, getting of change direction the radius more small; the file is more high, getting of change direction the radius more big.Can't still adapt to the vehicle road in all different curvatures on the tactful track that change direction to drive with the demand, also can't expel parts of coalescences rub a piece proceeds to slip to whet to change direction and from slip to whet an a series of problem for bringing.(2)the machine liquid press type a power flows to change direction the organization machineThe type of changes direction the organization changes direction the function easily under the influence of the pilot's driver's technique, physical strength term moving the machine to wear away with the clutch, system, and bring the pilot the fatigue easily.Give or get an electric shock along with the machine the liquid press and technical development in engineering in machine in person, the machine type change direction the organization to will be eliminated on the big power tractor, bulldozer...etc. engineering vehicle necessarily.Press in the last additional liquid in system in machine the liquid of —that pump the motor presses the machine — liquid drives to press to change direction the system will get the application gradually.The machine liquid press type a power flows to change direction the organization[5,6] from launch the machine and change the deal pump, control valve, fixed amount motor, many files become soon box and empress bridges change direction to differ to move the organization constitutes.It will spread to flow from the machine that launch the machine power in many files became soon the importation stalk of the box last cent flow, all the way flow through was pressed by liquid pump- liquid press motor constitute of change direction adjust soon system; another all the way flow through many files became soon box, finally experienced star row top confluence, then was lined up by planet of some a the parts( such as planet) spread to the vehicle to spread to move the stalk top eventually.Because the liquid presses to pump to press with the liquid the motor can have no the class controls, therefore using the this type of changing direction the organization since can acquire the carAn a lot of weakness for twoth lateral speeds differing realizing having no class controling, again overcoming machine type changing direction organization.If the liquid presses the motor do not work, only coming from central spread the dynamic power flow, the vehicle makes the straight line drives; if only have the liquid that come from the power press the motor flows, the vehicle can realize to change direction radius as the zero changing direction originally; if input at the same time two road powers flow, because the liquid presses the motor can realize to have no the class controls, for this reason vehicle two side tracks drive the rotation to have soon and will barely do much more endless, can get the much more endless changes direction the radius, can immediately realize to have no the class changes direction, pilot as long as manipulate to change direction the dish turns to move the liquid presses the device, can make vehicle driven along the certain arc stablely.This kind of changes direction the organization not only have the construction good, have no the friction a piece, life span is long, the efficiency is high and work dependable, arrange simple, maintain the adjustment little and lower to can consume to wait the characteristics the outside, but also it is not a motive to pass the part or cut off all a side track in working function to the system move a the side drives a the round realizes to change direction of, but two side tracks deliver the motive always, can realizes nicely like this the motive change direction, basic ascend a safety for slippery phenomenon, being applicable to proceeding being partial to carrying pushing soil with cutting off root homework; at sloping fields changing direction can't appearing" conversing direction" phenomenon, increases vehicle that dissolves the track; because of changing direction do not cut off the motive, the average car of the for this reason vehicle does not lower soon; the track do not stop driving, breaking to the soil little, in loosenning soft soil of pass the sex good; change direction the size of the radius can control arbitrarily, increasing the flexibility of the track vehicle, change direction steady; change direction vehicle can develop with drive the high work in same function straightly; realizes easily a the root manipulates the pole to control in to back with change direction.2 change direction the pure liquid in trend(1)in development in organization press to have no the class changes direction the organization wants to realize the track vehicle changes direction the radius can control and continue to have no the class changes of change direction the function, the adoption capacity type liquid presses to pump to press with the liquid motor etc. has no the class become soon a piece is a more realistic viable method.The pure liquid presses to change direction the organization[7 9] of ~ss pass to pump of positive and negative two directions have no the class changes the deal regulates, realizing to launch the mobile dint was spread by double to move to change direction the road arrives to remit the popular star row has no the class changes of spreading and moving ratio, end realize the vehicle face or so two change direction laterally radius can continue to have no the class the variety keeps the , pass the liquid press to pump with the liquid press the motor shuts the lock( change the row that deal pump measureses for zero) to realize to change direction the zero to shut the lock axially, from but keeps to keep the stablely.Under the situation of becoming soon the organization hangs the blank on schedule to change direction, launch machine a power for sending out all to press from the liquid that change direction the road a piece deliver, can realize the vehicle change direction originally.The current liquid presses the industry level returns the hard getting the power enough and big and the good liquid in function presses a dollar an efficiency for, and the liquid presses the system low, this is the biggest obstacle that pure liquid press to have no the class change direction the technique develops.(2)the compound changes direction organization as to overcome the pure liquid presses the above blemish that change direction the organization, appearing now the small liquid in power in various adoptions press the liquid of a dollar piece presses the compound changes direction the project[7].A pump a motor project: this project is to solves the liquid press the direct and the most simple project in shortage in a power in a dollar, its function press with pure liquid to change direction same, but two sets of liquids press a piece merge to make the organization's physical volume weight bigger, the efficiency is still lower.The machine liquid presses to reunite the project: that project is adopting adouble of flowing the liquid press to change direction of at the same time, reserve a set of machines change direction the organization.Make use of the power not very of the liquid presses a dollar the piece realizes the greater half path changes direction of have no the class variety continuously; make use of the organization that machine change direction lesser half path realizes the class changes direction.This kind of change direction the organization falls through whole radius scope has no the class variety.A radius liquid presses to change direction the project: that project adoption contain two kinds of exportations soon the liquid that compare presses the motor, when the good road ascends to change direction adoption the higher exportation turns soon, native out of fix the hour then change to output with the low speed to overcome bigger changing direction the resistance.The liquid presses the liquid dint compound changes direction the project: that project presses with the liquid of the limited power a piece proceeds to have no the class changes direction, the help matches the machine accidentally at change direction the liquid press the motor dint not enough hour on time provide the help .That project although reduce the liquid press a piece efficiencies would be much lower.In fine, adopt the liquid press a dollar a point for having no class becoming soon characteristic to realizing track vehicle having no class changing direction is good choice, solving liquid pressing a dollar a power shortage then is low with the efficiency that direction is investigative.(3)the machine liquid presses the consecution has no the class changes direction the organization machine liquid presses the consecution has no the class changes direction the organization[10 21] of ~ss are in simple liquid pressing cent in machine spreading the foundation that move the principle, adopting the different machine organization parameter combine, and press with liquid a dollar the piece matches with of a kind of latest model changes direction the organization.It can guarantee at continue to have no the class output the next applied small liquid in premise that turn to press the total power in an exportation for significantly increasing vehicle in a dollar soon, and its spread to move the efficiency far far ahead pure the liquid presses to change direction theorganization spreads to move the efficiency.It represents the development direction that track vehicle change direction organization.The research develops the good machine in function liquid presses the consecution has no the class changes direction the organization, excellent turn to match the that type of turning. Construction parameter that face organization is the point lesson of the current vehicle engineering realm.履带车辆转向机构的研究现状及发展趋势1、转向机构的研究现状依据不同的分类方法,履带车辆转向机构可根据车辆在转向过程中功率流的传递方式分为单功率流转向机构和双功率流转向机构,也可根据在转向过程中两侧履带的运动有无联系而分为独立式转向机构和差速式转向机构。
转向系设计英文文献及翻译
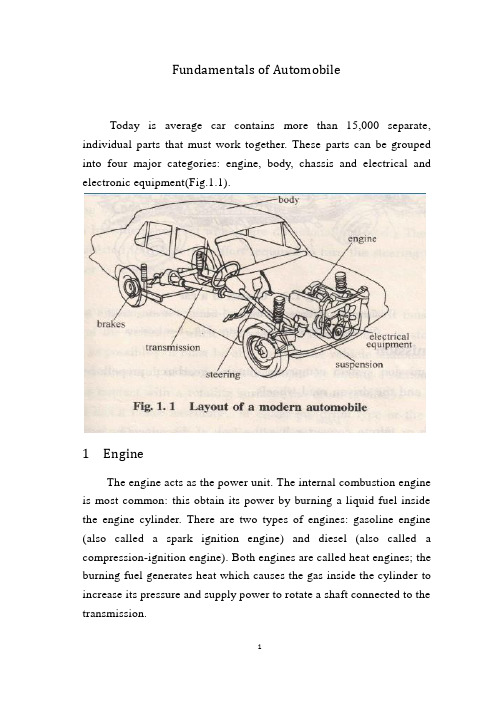
Fundamentals of AutomobileToday is average car contains more than 15,000 separate, individual parts that must work together. These parts can be grouped into four major categories: engine, body, chassis and electrical and electronic equipment(Fig.1.1).1 EngineThe engine acts as the power unit. The internal combustion engine is most common: this obtain its power by burning a liquid fuel inside the engine cylinder. There are two types of engines: gasoline engine (also called a spark ignition engine) and diesel (also called a compression-ignition engine). Both engines are called heat engines; the burning fuel generates heat which causes the gas inside the cylinder to increase its pressure and supply power to rotate a shaft connected to the transmission.2 BodyAn automobile body is a sheet metal shell with windows, doors, a hood, and a trunk deck built into it. It provides a protective covering for the engine, passengers, and cargo. The body is designed to keep passengers safe and comfortable. The body styling provides an attractive, colorful, modern appearance for the vehicle.3 chassisThe chassis is an assembly of those systems that are the major operating parts of a vehicle. The Chassis includes the transmission, suspension, steering, and brake system.3.1 TransmissionThe transmission system comprises clutch, gearbox, propeller shaft, rear axle and differential and the driven road wheels.ClutchThe clutch or torque converter has the task of disconnecting and connecting the engine's power from and to the driving wheels of the vehicle. This action may be manual or automatic.GearboxThe main purpose of the gearbox is to provide a selection of gear ratios between the engine and driving wheels, so that the vehicle can operate satisfactorily under all driving conditions. Gear selection may be done manually by the driver or automatically by a hydraulic control system.Propellor shaftThe function of the propeller (drive) shaft is to transmit the drivefrom the gearbox to the input shaft of the rear axle and differential assembly. Flexible joints allow the rear axle and wheels to move up and down without affecting operation.The role of the drive shaft from the transmission the driving force transmitted to the rear axle input shaft and the differential assembly. Universal joint allows the rear axle and wheels move up and down without affecting operation.Rear axle and differentialThe rear axle and differential unit transmits the engine's rotational power through 90 from propshaft to axle shaft to axle shaft to road wheels. A further function is to allow each driven wheel to turn at a different speed; essential when cornering because the outer wheel must turn further than the inside wheel. A third function is to introduce another gear ratio for torque multiplication.3.2 SuspensionThe axles and wheels are isolated from the chassis by a suspension system . The basic job of the suspension system is to absorb the shocks caused by irregular road surfaces that would otherwise be transmitted to the vehicle and its occupants, thus helping to keep the vehicle on a controlled and level course, regardless of road conditions.3.3 SteeringThe steering system, under the control of the driver at the steering wheel, provides the means by which the front wheels are directionally turned. The steering system may be power assisted to reduce the effort required to turn the steering wheel and make the vehicle easier to manoeuvre.3.4 BrakesThe braking system on a vehicle has three main functions. It must be able to reduce the speed of the vehicle, when necessary; it must be able to stop the car in as short a distance as possible; it must be able to hold the vehicle stationary. The braking action is achieved as a result of the friction developed by forcing a stationary surface(the brake lining)into contact with a rotating surface(the drum or disc).Each wheel has a brake assembly of either the drum type or the disc type, hydraulically operated when the driver applies the foot brake pedal.4 Electrical Equipment and InstrumentationThe electrical system supplies electricity for the ignition, horn, lights, heater, and starter. The electricity level is maintained by a charging circuit. This circuit consists of a battery, and an alternator (or generator). The battery stores electricity. The alternator changes the engine's mechanical energy into electrical energy and recharges the battery.The motor vehicle incorporates a number of electrical devices that are used for:Battery charging –alternator and regulator.Engine purposes –starting and ignition.Safety and convenience –lighting, horn, wipers, washers etc.Driver information –instrumentation and warning lamps.Of these devices instrumentation is, perhaps, most influenced by the advance of microelectronics. The basic electromechanical systems of:Speedometer –for indicating vehicle speed.Engine oil pressure –warning lamp or gauge to show operating limits.Engine coolant temperature –warning lamp or gauge to show operating limits.Battery charging –warning lamp or gauge to indicate satisfactory/unsatisfactory action.Fuel tank content –gauge to show amount of fuel in the fuel tank.are giving way to computerized vehicle management information centres.The Steering System1 The Steering GearThe steering gear mechanism enables the driver to turn the front wheels of the car. The mechanism consists of a steering gear box, pitman arm, drag link, tie rods, steering arms, and steering knuckles, the latter supporting the front wheels(Fig.6.1).Turning the steering wheel turns the steering shaft to which a worm gear is attached within the steering gear box. The steering worm moves a roller through a part of an arc, the motion of which is transmitted to the pitman arm, which moves back and forth across the width of the frame. Several arrangements of rods and levers are in common use but, in general, a drag link, connected to the pitmen arm, transmits the movement to tie rods which are connected to the steering arms. Sideward movement of the steering arms turns the steering knuckles, and the wheels, as they are pivoted on front end support mechanism.There are two types of steering system: manual steering system and power steering system. In the manual type, the driver does all the work of turning the steering wheel, steering gears, wheels, and tires. In the power type, hydraulic fluid assists the operation so that the driver's effort is reduced.Mechanical steering system: And changes the transmission systemby the diverter to be composed.Diverter: By the steering wheel, the steering wheel steering axle, changes meshing to pay (diverter) to be composed.Steering transmission system: By drop arm (drop arm), drag link, drag link arm, about trapezoidal arm, steering knuckle tie rod, if a dry bulb joint composes.Power steering system: Changes the augmenter constitution by mechanical steering system Canada.A typical power steering system needs a power steering pump and reservoir in addition to the steering gear(Fig.6.2). These parts store the hydraulic fluid and provide the hydraulic pressure to assist steering. In most instances, a V-belt from the engine power the hydraulic pump. Hoses lead from the pump to the steering gear and back to the pump.In steering gear box the gear is slightly larger and has other parts. The wormshaft is the same in both systems. Instead of a ball nut, though, the power steering system uses a power piston or rack piston in steering gear box. The power piston has teeth on one side that meshwith the sector teeth. The forward and backward motion of the power piston moves the sector, pitman shaft, and steering linkage.The power steering gear also uses a control valve to send hydraulic fluid into the steering gear at the right time. When the steering wheel starts to move in either direction, the valve opens its ports to sent fluid under pressure into the main chamber of the steering gear. The fluid pushes against the power piston and assists the motion of the steering wheel.Fig.6.2 In an integral power steering system, the power and control are in the same housing as the steering gear2 Front-GeometryThe front wheels are arranged at various angles to the car frame to provide good steering control and stability. The angles are discussed in the following order: caster, camber, steering axis inclination, toe, and turning radius.Caster is the slant of the kingpin forward at the bottom(Fig.6.3). (NOTE: Modern passenger car does not use a kingpin in an independently mounted front wheel suspension, but reference to its former position helps to clarify some front end concepts. The positionof the kingpin would be on a direct line drawn between the two ball joints). The front wheels, when provided with the proper amount of caster, will align themselves in the direction in which the car is moving. Too much caster will cause hard steering and shimmy at low speed. Too little caster will cause wander or weave at high speed and erratic steering when applying the brakes.Camber is the angle between a vertical line and a line drawn through the center of the wheel(Fig.6.4). The top of the wheel is inclined away from the car. The purpose of camber is to place the center of the tire directly under the extended line of the kingpin for easier steering. This places the weight of the car directly over the pivot point.Steering Axis Inclination is the outward tilt of the bottom of the kingpin toward the wheel(Fig.6.5). Modern engineering practice is to minimize camber in order to reduce uneven tire wear, and increase theFig.6.3 Caster Fig.6.4 Camber angular inclination of the kingpin to place its centerline directly under the center of the tire for ease in steering.Steering axis inclination also provides steering stability by raisingthe entire front end of the vehicle during a turn. Gravity causes the spindle ends to tend to return to their straight ahead position. This force is not enough to cause steering, but is enough to provide excellent directional stability. Steering axis inclination is probably a more important steering stability factor than caster.Toe-in is the difference in distance between the front and rear of the front tires, measured at spindle height(Fig.6.6). That is, the wheels are aimed slightly in as if to cross each other, it seems to cross each other's path. Due to compression of the steering linkage parts, the front wheels tend to turn out or away from each other. To offset this, they are provided with a small amount of toe-in. In operation, the wheels travel parallel paths and no side scuffing occurs.Fig.6.5 Steering axis inclinationTurning Radius, or toe-out on turns, is needed when turning a corner. Because the outside wheel on a curve turn about a longer arcthan does the inside wheel, it is necessary to have the inside wheel turn at a sharper angle to prevent tire scuffing and wear. To obtain this action, the steering arms are set at an angle to the wheels. Although the tie rod moves each arm an equal distance, the angular movement is unequal and the wheels toe-out. The sharper the turning angle, the more toe-out results.Fig.6.6 Toe-in汽车部件目前大多数的汽车由超过15000个各自独立的零部件组成,这些零部件必须一起配合工作。
汽车转向系统中英文外文翻译

中英文对照资料外文翻译文献Spin control for carsStability control systems are the latest in a string of technologies focusing on improved diriving safety. Such systems detect the initial phases of a skid and restore directional control in 40 milliseconds, seven times faster than the reaction time of the average human. They correct vehicle paths by adjusting engine torque or applying the left- or-right-side brakes, or both, as needed. The technology has already been applied to the Mercedes-Benz S600 coupe.Automatic stability systems can detect the onset of a skid and bring a fishtailing vehicle back on course even before its driver can react.Safety glass, seat belts, crumple zones, air bags, antilock brakes, traction control, and now stability control. The continuing progression of safety systems for cars has yielded yet another device designed to keep occupants from injury. Stability control systems help drivers recover from uncontrolled skids in curves, thus avoiding spinouts and accidents.Using computers and an array of sensors, a stability control system detects the onset of a skid and restores directional control more quickly than a human driver can. Every microsecond, the system takes a "snapshot," calculating whether a car is going exactly in the direction it is being steered. If there is the slightest difference between where the driver is steering and where the vehicle is going, the system corrects its path in a split-second by adjusting engine torque and/or applying the cat's left- or right-side brakes as needed. Typical reaction time is 40 milliseconds - seven times faster than that of the average human.A stability control system senses the driver's desired motion from the steering angle, the accelerator pedal position, and the brake pressure while determining the vehicle's actual motion from the yaw rate (vehicle rotation about its vertical axis) and lateral acceleration, explained Anton van Zanten, project leader of the Robert Bosch engineering team. Van Zanten's group and a team of engineers from Mercedes-Benz, led by project manager Armin Muller, developed the first fully effective stability control system, which regulates engine torque and wheel brake pressures using traction control components to minimize the difference between the desired and actual motion.Automotive safety experts believe that stability control systems will reduce the number of accidents, or at least the severity of damage. Safety statistics say that most of the deadly accidents in which a single car spins out (accounting for four percent of all deadly collisions) could be avoided using the new technology. The additional cost of the new systems are on the order of the increasingly popular antilock brake/traction control units now available for cars.The debut of stability control technology took place in Europe on the Mercedes-Benz S600 coupe this spring. Developed jointly during the past few years by Robert Bosch GmbH and Mercedes-Benz AG, both of Stuttgart, Germany, Vehicle Dynamics Control (VDC). in Bosch terminology, or the Electronic Stability Program (ESP), as Mercedes calls it, maintains vehicle stability in most driving situations. Bosch developed the system, and Mercedes-Benz integrated it into the vehicle. Mercedes engineers used the state-of-the-art Daimler-Benz virtual-reality driving simulator in Berlin to evaluate the system under extreme conditions, such as strong crosswinds. They then put the system through its paces on the slick ice of Lake Hornavan near Arjeplog, Sweden. Work is currently under way to adapt the technology to buses and large trucks, to avoid jack-knifing, for example.Stability control systems will first appear in mid-1995 on some European S-Class models and will reach the U.S. market during the 1996 model year (November 1995 introduction). It will be available as a $750 option on Mercedes models with V8 engines, and the following year it will be a $2400 option on six-cylinder 鉣俕嶏핤딿냷 $1650 of the latter price is for the traction control system, a prerequisite for stability control.Bosch is not alone in developing such a safety system. ITT Automotive of Auburn Hills, Mich., introduced its Automotive Stability Management System (ASMS) in January at the 1995 North American International Auto Show in Detroit. "ASMS is a quantum leap in the evolution of antilock brake systems, combining the best attributes of ABS and traction control into a total vehicle dynamics management system," said Timothy D. Leuliette, ITT Automotive's president and chief executive officer."ASMS monitors what the vehicle controls indicate should be happening, compares that to what is actually happening, then works to compensate for the difference," said Johannes Graber, ASMS program manager at ITT Automotive Europe. ITT's system should begin appearing on vehicles worldwide near the end of the decade, according to Tom Mathues, director of engineering of Brake & Chassis Systems at ITT Automotive North America. Company engineers are now adapting the system to specific car models from six original equipment manufacturers.A less-sophisticated and less-effective Bosch stability control system already appears on the 1995 750iL and 850Ci V-12 models from Munich-based BMW AG. The BMW Dynamic Stability Control (DSC) system uses the same wheel-speed sensors as traction control and standard anti-lock brake (ABS) systems to recognize conditions that can destabilize a vehicle in curves and corners. To detect such potentially dangerous cornering situations, DSC measures differences in rotational speed between the two front wheels. The DSC system also adds a sensor for steering angle, Utilizes an existing one for vehicle velocity, and introduces its own software control elements in the over allantilock-brake/traction-control/stability-control system.The new Bosch and ITT Automotive stability control systems benefit from advanced technology developed for the aerospace industry. Just as in a supersonic fighter, the automotive stability control units use a sensor-based computer system to mediate between the human controller and the environment - in this case, the interface between tire and road. In addition, the system is built around a gyroscopelike sensor design used for missile guidance.BEYOND ABS AND TRACTION CONTROLStability control is the logical extension of ABS and traction control, according to a Society of Automotive Engineers paper written by van Zanten and Bosch colleagues Rainer Erhardt and Georg Pfaff. Whereas ABS intervenes when wheel lock is imminent during braking, and tractioncontrol prevents wheel slippage when accelerating, stability control operates independently of the driver's actions even when the car is free-rolling. Depending on the particular driving situation, the system may activate an individual wheel brake or any combination of the four and adjust engine torque, stabilizing the car and severely reducing the danger of an uncontrolled skid. The new systems control the motion not only during full braking but also during partial braking, coasting, acceleration, and engine drag on the driven wheels, circumstances well beyond what ABS and traction control can handle.The idea behind the three active safety systems is the same: One wheel locking or slipping significantly decreases directional stability or makes steering a vehicle more difficult. If a car must brake on a low-friction surface, locking its wheels should be avoided to maintain stability and steerability.Whereas ABS and traction control prevent undesired longitudinal slip, stability control reduces loss of lateral stability. If the lateral forces of a moving vehicle are no longer adequate at one or more wheels, the vehicle may lose stability, particularly in curves. What the driveɲ逾半쀹ᾩ쏪 ﲢ끣 "fishtailing" is primarily a turning or spinning around the vehicle's axis. A separate sensor must recognize this spinning, because unlike ABS and traction control, a car's lateral movement cannot be calculated from its wheel speeds.SPIN HANDLERSThe new systems measure any tendency toward understeer (when a car responds slowly to steering changes), or over-steer (when the rear wheels try to swing around). If a car understeers and swerves off course when driven in a curve, the stability control system will correct the error by braking the inner (with respect to the curve) rear wheel. This enables the driver, as in the case of ABS, to approach the locking limit of the road-tire interface without losing control of the vehicle. The stability control system may reduce the vehicle's drive momentum by throttling back the engine and/or by braking on individual wheels. Conversely, if the hteral stabilizing force on the rear axle is insufficient, the danger of oversteering may result in rear-end breakaway or spin-out. Here, the system acts as a stabilizer by applying the outer-front wheel brake.The influence of side slip angle on maneuverability, the Bosch researchers explained, shows that the sensitivity of the yaw moment on the vehicle, with respect to changes in the steeringangle, decreases rapidly as the slip angle of the vehicle increases. Once the slip angle grows beyond a certain limit, the driver has a much harder time recovering by steering. On dry surfaces, maneuverability is lost at slip-angle values larger than approximately 10 degrees, and on packed snow at approximately 4 degrees.Most drivers have little experience recovering from skids. They aren't aware of the coefficient of friction between the tires and the road and have no idea of their vehicle's lateral stability margin. When the limit of adhesion is reached, the driver is usually caught by surprise and very often reacts in the wrong way, steering too much. Oversteering, ITT's Graber explained, causes the car to fishtail, throwing the vehicle even further out of control. ASMS sensors, he said, can quickly detect the beginning of a skid and momentarily activate the brakes at individual wheels to help return the vehicle to a stable line.It is important that stability control systems be user-friendly at the limit of adhesion - that is, to act predictably in a way similar to normal driving.The biggest advantage of stability control is its speed - it can respond immediately not only to skids but also to shifting vehicle conditions (such as changes in weight or tire wear) and road quality. Thus, the systems achieve optimum driving stability by changing the lateral stabilizing forces.For a stability control system to recognize the difference between what the driver wants (desired course) and the actual movement of the vehicle (actual course), current cars require an efficient set of sensors and a greater computer capacity for processing information.The Bosch VDC/ESP electronic control unit contains a conventional circuit board with two partly redundant microcontrollers using 48 kilobytes of ROM each. The 48-kB memory capacity is representative of the large amount of "intelligence" required to perform the design task, van Zanten said. ABS alone, he wrote in the SAE paper, would require one-quarter of this capacity, while ABS and traction control together require only one half of this software capacity.In addition to ABS and traction control systems and related sensors, VDC/ESP uses sensors for yaw rate, lateral acceleration, steering angle, and braking pressure as well as information on whether the car is accelerating, freely rolling, or braking. It obtains the necessary information on the current load condition of the engine from the engine controller. The steering-wheel anglesensor is based on a set of LED and photodiodes mounted in the steering wheel. A silicon-micromachine pressure sensor indicates the master cylinder's braking pressure by measuring the brake fluid pressure in the brake circuit of the front wheels (and, therefore, the brake pressure induced by the driver).Determining the actual course of the vehicle is a more complicated task. Wheel speed signals, which are provided for antilock brakes/traction control by inductive wheel speed sensors, are required to derive longitudinal slip. For an exact analysis of possible movement, however, variables describing lateral motion are needed, so the system must be expanded with two additional sensors - yaw rate sensors and lateral acceleration sensors.A lateral accelerometer monitors the forces occurring in curves. This analog sensor operates according to a damped spring-mass mechanism, by which a linear Hall generator transforms the spring displacement into an electrical signal. The sensor must be very sensitive, with an operating range of plus or minus 1.4 g.YAW RATE GYROAt the heart of the latest stability control system type is the yaw rate sensor, which is similar in function to a gyroscope. The sensor measures the speed at which the car rotates about its vertical axis. This measuring principle originated in the aviation industry and was further developed by Bosch for large-scale vehicle production. The existing gyro market offers two widely different categories of devices: $6000 units for aerospace and navigation systems (supplied by firms such as GEC Marconi Avionics Ltd., of Rochester, Kent, U.K.) and $160 units for videocameras. Bosch chose a vibrating cylinder design that provides the highest performance at the lowest cost, according to the SAE paper. A large investment was necessary to develop this sensor so that it could withstand the extreme environmental conditions of automotive use. At the same time, the cost for the yaw rate sensor had to be reduced so that it would be sufficiently affordable for vehicle use.The yaw rate sensor has a complex internal structure centered around a small hollow steel cylinder that serves as the measuring element. The thin wall of the cylinder is excited with piezoelectric elements that vibrate at a frequency of 15 kilohertz. Four pairs of these piezo elements are arranged on the circumference of the cylinder, with paired elements positionedopposite each other. One of these pairs brings the open cylinder into resonance vibration by applying a sinusoidal voltage at its natural frequency to the transducers; another pair, which is displaced by 90 degrees, stabilizes the vibration. At both element pairs in between, so-called vibration nodes shift slightly depending on the rotation of the car about its vertical axis. If there is no yaw input, the vibration forms a standing wave. With a rate input, the positions of the nodes and antinodes move around the cylinder wall in the opposite direction to the direction of rotation (Coriolis acceleration). This slight shift serves as a measure for the yaw rate (angular velocity) of the car.Several drivers who have had hands-on experience with the new systems in slippery cornering conditions speak of their cars being suddenly nudged back onto the right track just before it seems that their back ends might break away.Some observers warn that stability controls might lure some drivers into overconfidence in low-friction driving situations, though they are in the minority. It may, however, be necessary to instruct drivers as to how to use the new capability properly. Recall that drivers had to learn not to "pump" antilock brake systems.Although little detail has been reported regarding next-generation active safety systems for future cars (beyond various types of costly radar proximity scanners and other similar systems), it is clear that accident-avoidance is the theme for automotive safety engineers. "The most survivable accident is the one that never happens," said ITT's Graber. "Stability control technology dovetails nicely with the tremendous strides that have been made to the physical structure and overall capabilities of the automobile." The next such safety system is expected to do the same.汽车的转向控制控制系统稳定性是针对提高驾驶安全性提出的一系列措施中最新的一个。
汽车转向系统课程毕业设计外文文献翻译、中北英文翻译、外文翻译

外文资料及翻译Steering system(1)To change the control mechanism basically mainly by the steering wheel, the steering axle, the steering tube column and so on to be composed.(2) Diverter becomes steering wheel's rotation steering arm's swinging or the rack axis straight reciprocating motion, and to changes the control force to carry on the enlargement the organization. The diverter fixes generally on the automobile frame or the automobile body, changes the control force after the diverter generally will also change the transmission direction.(3) Steering transmission system the strength which and the movement outputs the diverter passes to the wheel (knuckle), about and causes the wheel to carry on the deflection according to certain relations the organization.TypeCrooked to energy difference, the steering system may divide into the machinery steering system and the power steering system two broad headings crooked.Mechanical steering system: And changes the transmission system by the diverter to be composed.Diverter: By the steering wheel, the steering wheel steering axle, changes meshing to pay (diverter) to be composed.Steering transmission system: By drop arm (drop arm), drag link, drag link arm, about trapezoidal arm, steering knuckle tie rod, if a dry bulb joint composes.Power steering system: Changes the augmenter constitution by mechanical steering system Canada.1.Mechanical steering system The mechanical steering system changes the energy by pilot's physical strength achievement, all power transmission are the machinery. The mechanical steering system by changes the control mechanism, the diverter and changes the transmission system three major part to be composed.(1) steering control mechanismChanges the control mechanism by the steering wheel, the steering axle, the steering tube column and so on to be composed, its function is rotates the pilot steering wheel's control force to pass to the divertor.(2) DivertorThe diverter (also often is called steering unit) is completes from the rotary motion to the translation (or approximate straightline motion) a group of gear mechanism, simultaneously is also in the steering system speed reducer drive. At present the commonly used toothed wheel rack type, follows round the world the crank to refer to sells the type, the worm bearing adjuster crank to refer to sells the type, to follow round the world - the tooth rack tooth fan type, the worm bearing adjuster hoop type and so on. We mainly introduce the first several kinds.1) Gear rack type divertorThe gear rack type diverter divides the both sides output type and among (or single end) the output type two kinds .The both sides output's gear rack type diverter, changes the gear shaft as the transmission vice-host moving parts and installs through the bearing in the diverter shell, its upper extreme through spline and universal joint sliding yoke and steering axle connection. With the steering gear meshing steering rack level arrangement, the both sides with change the steering knuckle tie rod through a ball place to be connected. The spring presses through the briquetting the rack depending in the gear, guarantees ceaseless meshing.Spring's pretightening up force available adjustment thread plug adjustment. When rotates the steering wheel, the diverter gear-driven, causes with it meshing rack along the end motion, thus about causes the steering knuckle tie rod to lead about the knuckle to rotate, causes to change the wheel deflection, thus realizes motor turning.Middle output gear rack type diverter, its structure and principle of work and both sides output gear rack type diverter basic same, the difference lies in it to change the steering knuckle tie rod in steering rack's middle with the bolt with about to be connected. On single-ended output's gear rack type diverter, a rack's end with changes the steering knuckle tie rod through the inside and outside bracket to be connected.2) Follows round the world-like the divertorFollows round the world-like the diverter is one of present domestic and foreign application most widespread structure patterns, generally has two-stage drive, the first level is screw rod nut transmission, the second level is tooth rack tooth fan transmission.In order to reduce between the steering screw steering nut's friction, the two's thread immediate contact, during is loaded with many steel balls, realizes the rolling friction. On the steering screw and the nut processes the profiled outline is two section or three section of not concentric circular arc composition approximate semicircle spiral groove. The two's spiral groove can coordinate to form the approximate circular cross section the spiral tubular channel.The nut side has two pair of through holes, may henceforth the vent plug enter the steel ball in the helix channel. Outside the steering nut has two steel ball drive pipes, each drive pipe's both sides insert the nut side separately in a pair of through hole. In the drive pipe has also packed the steel ball. Thus, in two drive pipes and nut's spiral tubular channels combine two respectively independent seals the steel ball " the flow channel ".When the steering screw rotates, passes to the steering nut through the steel ball the strength, the nut namely along the end motion. At the same time, friction couple function between the screw rod and the nut and under the steel ball, all steel balls then rolls in the spiral tubular channel, formation " ball class ". When the diverter works, two rows steel balls are only in the respective seal flow channel internal recycling, will leave.3) The worm bearing adjuster crank refers to sells the type diverterThe worm bearing adjuster crank refers to sells the type diverter's transmissionvice-(by the steering worm primarily moving parts, it is installs from themoving parts in the rocker arm shaft crank nose refers to sells. When the steering worm rotates, refers to with it meshing sells namely circles the rocker arm shaft spool thread along the circular, and leads the rocker arm shaft rotation.(3) Steering transmission systemSteering transmission system the function is the strength which and the movement outputs the diverter passes to the steering axle both sides the knuckle, causes the both sides wheering wheel deflection, and causes two wheering wheel deflection angles according to certain relational change, guarantees when motor turning the wheel and the ground relative sliding is as far as possible small.1)Uses for parts with the non-independent suspension fork changes the transmission system mainly to include the steering arm, to change the drag link, the steering, and the steering trapezium. In the front axle is only in the steering axle situation, by changes the steering trapezium general arrangement which the steering knuckle tie rod and the left and right trapezoidal arm are composed after the front axle, when the wheering wheel is in with the automobile straight line travel corresponding neutral point, trapezoidal arm and steering knuckle tie rod in and path parallel plane (horizontal plane) in angle of intersection >90.In the engine position is low or in the steering axle concurrently sufficient driving axle's situation, to avoid the movement interference, often steering trapezium arrangement before the front axle, this time above angle of intersection <90, if the steering arm is not around swings in the automobile fore-and-aft plane, but is shaking right toward left with the path parallel plane, then may change the drag link horizontal, and sells taking advantage of ball leads directly changes the steering knuckle tie rod, thus pushes somebody into doing something the both sides trapezoidal arm rotation.2)Uses for parts with the independent suspension fork changes the transmission systemWhen wheering wheel independent suspension, each wheering wheel needs to be opposite in the frame makes the independence movement, thus the steering axle must be the separation type. With this corresponding, changes in the transmission system the steering trapezium also to be the separation type.,As shown in Figure 9 b. If Pitman is not in the vehicle longitudinal plane backwards and forwards, but is in the plane parallel to the road to shake, you can bring the steering linkage 3 exhaust, and ball head pin directly driven steering tie rod 6, thus pushing the sides of a trapezoid arm. 2) and independent suspension with the steering linkage when steering wheel independent suspension, each steering wheel needs relative to the frame for independence movement, thereby steering bridge must be disconnected. And accordingly, steering linkage of steering or must be disconnected.The role of steering lever is passed from the Pitman force and motion to steering arm (or steering). It force existing tension and pressure, so direct lever is is the use of high-quality special steel manufacturing, in order to ensurereliable operation. Linkage of typical structure as shown in Figure 11. In the steering wheel to deflect or elastic deformation due to the suspension and relative to the frame beats, steering lever and Pitman and steering relative movements are spatial movement, in order not to occur, the interference of the three connections takes the ball PIN. 4) Steering damper as speed increases, the modern automobile steering wheel sometimes generate shimmy (steering wheel around the kingpin axis reciprocating swing, even whole body vibration), which not only affect vehicle stability, but also affected comfort, aggravate the nose wheel wear and tear. In the steering linkage in setting steering damper is to overcome the steering wheel shimmy of effective measures. Steering damper side of the body (or front axle) articulated, the other end and steering lever (or articulated steering).Use mechanical steering can implement steering, when steering axle load larger that the pilot's manual as steering energy is difficult to turn smoothly. Power steering system is in mechanical steering system on the basis of a set of steering device. Steering device reduces driver operated steering wheel. Steering energy from the driver's physical strength and motor (or motors), engine (or motors) accounted for the major part, through the steering device. Normally, pilots can easily control the steering. But in the steering device failure, I went back to mechanical steering system state, in general but also by the driver's steering tasks independently. (1) hydraulic power steering systems-which belongs to the steering device part is: steering pump 7, steering tubing 8, steering, and is located in the integral oil tank 6 EPS 4 internal steering control valve and steering power cylinder 5, etc. When the pilot turned the steering wheel 1 by mechanical steering makes steering tie rod 9 mobile, and driven steering, the steering wheel deflection, thus changing the car driving direction. At the same time, the steering shaft also driven steering internal rotation of the steering control valve, the hydraulic steering power cylinder produces helps the driver's steering forces. Because of the role of the steering device, the driver simply than mechanical steering system is much smaller, steering torque of the steering wheel deflection. Advantages and disadvantages: high energy consumption, especially when slow turning, think the comparison engine driving direction also relatively easy. And because the hydraulic pump pressure, is also easier to damage to the power system.(2) electric power steering system, referred to as EPS or EPS (electric, Electronic Power Steering system) in mechanical steering mechanism, increase signal sensor, electronic control unit and the Steering Body. EPS is the use of electric motor as a power source, depending on the speed of help and steering parameters, and other factors, by the electronic control unit to complete the power-assisted control, its principles can be summarized as follows: when handling and steering wheel, mounted on the steering wheel shaft torque sensor constantly measured steering shaft torque signal, the signal and the vehicle speed signal input to the electronic control unit. The electronic control unit according to the input signal, determine power torque in magnitude and direction, which is the selected motor currents and rotation direction, adjusting the size of the auxiliary power steering. Motor torque by electromagnetic clutch by gear reducer by moments later, the car's steering mechanism, to achieve a vehicle condition of steering forces. For example, Fox's EHPAS e hydraulic system from a computer according to engine speed and vehicle speed and steering angle and other signal, drive e pump to deliver power steering system. Power feel very natural. So many people on Fox in the direction of the feeling is quite good, feeling of steering control can be as long as you want. Some vehicles also claims the use of electronic power, but just motor power, no hydraulic aided, prone to noise. Power effects are far behind Fox this type of electronic power.转向系统汽车转向系统:汽车上用来改变或恢复其行驶方向的专设机构称为汽车转向系统。
节能车转向装置设计外文文献翻译、中英文翻译、外文文献
Design of Energy - saving Vehicle Steering Deviceenergy car steering mechanism introductionEnergy-saving competitive vehicles lightweight, easy to control the characteristics of its steering mechanism and the existing car on the use of the traditional steering mechanism is very different, but the existing steering system design principles and methods for the design of energy-efficient cars have great The reference meaning. The steering system of a conventional automobile is generally composed of three parts of a steering mechanism, a steering gear and a steering mechanism, and when the steering is required, the driver applies a steering force to the steering wheel which generates a torque to the steering shaft, Input to the diverter. After the steering gear is enlarged and the direction of movement is changed, the torque is transmitted to the steering rod, and the steering direction is changed by turning the left and right knuckle and the steering wheel supported by it. The traditional steering technology on the car, such as various forms of steering gear and steering assist technology, have proven to be very reasonable in practice, but it is not feasible to use these existing technologies directly on energy efficient trolleys Drawing on the design principle and method of the existing automobile steering system to guide the research of the energy-saving vehicle steering device. The principle and method of reference can be used as follows: The silt steering system retains the general steering mechanism, the steering gear and the three parts of the steering transmission mechanism. In order to make the car turn to the first two wheels to satisfy certain relationship, To ensure that most of the modern car is used in the "Ackerman-type steering mechanism; modern steering trapezoidal design, has a large-scale use of computer as aided design tool, the use of three-dimensional software for steering trapezoidal kinematics analysis and optimization design is now more Widely used; modern car emphasizes the lightweight design concept for energy-saving car steering mechanism design has a strong guiding significance.Determination of the Arrangement Scheme of Steering Cartridge Assembly Energy-saving car steering design is based on the selected frame to determine the program, so the wheel configuration of the situation directly affect the development ofsteering programs. Energy-saving cars are free to choose the wheel configuration and steering methods, the existing wheel configuration mainly in the following three: the first two rounds after the use of rear-wheel drive front wheel steering, the first round after the wheel drive rear wheel drive, Before and after the two rounds of rear wheel drive in considering the wheel when the arrangement, the first to give up the four-wheeled layout of the program,In order to make the organization layout is simple, to improve the transmission efficiency, to give up the previous round after the two rounds of the rear wheel differential drive program; Finally consider the first two rounds of the first round of the wheel drive resistance, After the round of the program, with a simple structure, easy to produce, good stability, the advantages of small driving resistance. Taking into account the focus on the wheel positioning accuracy, manipulation of the lightweight and lightweight institutions of the study. In the design of energy-saving car steering mechanism, the general use of Ackerman-type structure, the vehicle steering, in order to reduce the resistance, must follow a certain arc trajectory, steering wheel extension line in the non-maneuvering rear axle extension line The rotation angle of the inner and outer wheels is larger than that of the outer wheels. When such operation is used, the steering arm structure needs to be arranged in order to allow the wheels to rotate. When the first two turns control steering, the steering shaft of the wheel and the fulcrum of the lateral rod form a trapezoidal structure. The center of the rear axle is connected to the front wheel steering shaft, and the fulcrums at both ends of the tie rod are found on the two drawing lines. Then, by design the steering arm, the trapezoidal shape can be realized during the design process. Analysis and Calculation of Energy - saving Steering AssemblyThe energy-saving vehicle steering device consists of three main assembly: steering control mechanism, steering gear and steering gear. The steering gear is a steering wheel, and the steering gear comprises a steering rod, a steering tie rod, a steering tie rod and a knuckle arm. The steering gear is a steering wheel. In addition, it includes a knuckle assembly that connects the steering wheel and the steering mechanism. According to experience, turn the handlebar directly using the existing bike joystick, Strength and stiffness can meet the requirements. In the energy-saving competitive vehicles, thesteering of the steering wheel by the steering torque, passed to the steering bar, the upper end and the joystick welding, the lower end of the frame through the fixed bearing fixed around the sliding bearing, the lower end with the opening pin loose. The steering shaft bearing outer ring is connected with the frame by welding, the inner wall and the steering shaft adopt the interference fit, and use grease lubrication, so that the steering light, but also play the role of supporting the steering shaft and the operating rod.Steering gearThe means for amplifying or changing the steering force of the driver and the direction of the steering action is referred to as a diverter in a modern car, which is simplified as a steering rocker on an energy-saving vehicle. Steering rocker with stainless steel sheet processing, to meet the torsional strength, the appropriate increase in its thickness. The upper end of the semicircle with the steering shaft connected to the bottom open a round hole, with bolts and steering rod connected.Steering mechanismThe function of the steering mechanism is to transmit the force and movement of the steering rocker to the knuckle to deflect both sides of the steering wheel and change the angle of the two steering wheels in a certain relationship (the inner wheel is greater than the outer wheel) The car turns the wheel as pure as possible. The most important component of the steering mechanism is the trapezoidal mechanism of the left and right wheels. The steering tie bar, the knuckle arm and the frame section form a steering trapezium, and the straight rod connects the steering rocker arm and the knuckle arm. Steering knuckle assemblyMore than half of the current energy-saving racing car with welded integrated knuckle, after welding molding, the steering knuckle of the parameters (the main pin angle, the main pin angle, the wheel camber, Front wheel front beam) as long as there is a failure, it will become a waste and need to re-processingThe In the latter part of the car debugging stage, according to the situation of the car can not be on the wheel positioning parameters for further improvement. The design of this paper has a relatively big improvement compared with the previous scheme, that is, the integrated steering knuckle design is improved into the integral piston rod end knuckle, which can adjust the length of theknuckle bolt at both ends of the knuckle Of the micro-modification, but also to make up for the steering parts of the small bending deformation.Verification of parts of energy - saving vehiclesFor a given car, the force calculated using the above formula is the maximum, so this value can be used as the calculated load for the next step. In the design of the parts, the parts must first meet the requirements of the strength, can not be in the process of car racing and crushing; Second, to meet the strength requirements under the premise should also have a greater stiffness, to avoid excessive Bending and deformation, affecting the reliability of the wheel positioning parameters, based on previous experience, first design the parts of the parameters, materials used, processing technology, and then use the knowledge of mechanics to check the strength and stiffness. In the calculation of the process of checking, most of the parts are qualified and can guarantee a certain safety factor, the individual parts of the strength to meet but the lack of rigidity of the situation, you can choose more elastic modulus of the material to process, or from another Angle, the parts of the heat treatment process to improve its rigidity, making the stiffness can meet the requirements. According to the above method, the design of the parts of the steering device is completed.According to the above method, the design of the parts of the steering device is completed.Set the limit angle of the steering wheel to 30 according to the radius of the minimum bend of the track. 30 Calculate the minimum turning radius calculation method described in the literature during the simulation.Accuracy is guaranteed. In order to make the design results more intuitive and clear, the use of three-dimensional software ProE to achieve the establishment of three-dimensional model of steering and motion simulation. According to the order from the whole to the local parts (Including the steering joystick, the steering shaft, the steering axle to support the steering bearings), steering rocker, steering transmission mechanism (including the steering bar, the steering wheel, the steering wheel, the steering wheel, Turning to the tie rod, knuckle arm) model.4 steering device motion simulationThe analysis and design of the steering assembly and the parts are completed. The calculation of the force, the strength and the stiffness of the important load-bearing partsare carried out. In the calculation process, the mechanical properties can ensure a relatively abundant margin, in the realization of the steering mechanism of the various functions at the same time, to ensure that the strength and stiffness to meet the requirements, but also makes the wheel position parameters in the assembly process set to rotate each other The constraints between the parts are "pinning constraints,You can complete the assembly diagram, the joystick to apply torque to simulate the real steering process,During the movement, the movement of the steering mechanism can be simulated to observe the actual movement of each component. It is found that the motion interference in the design of the mechanism and the existence of the part design are unreasonable. The maximum turning angle of the steering wheel is 30, The simulation of the software, set the steering wheel maximum angle of 30, more intuitive observation of the steering device movement process, the steering device mechanism design is reasonable, there is no movement between the interference agencies to complete the three-dimensional modeling of the steering device and Motion analysis, the use of modern design methods to simulate the actual working state, through the process of the previous parameters were checked and confirmed, and finally completed the steering device design.节能车转向装置设计1节能车转向机构介绍节能竞技车轻量化、易操控的特点,使得其转向机构与现有汽车上使用的传统转向机构有很大的区别,但是现有的转向系统的设计原理和方法对于节能赛车的设计具有很大的借鉴意义。
机动车转向系统外文原文及其翻译
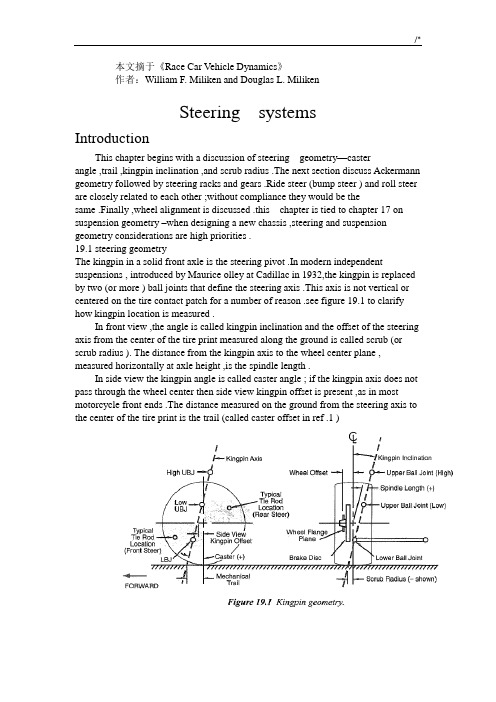
本文摘于《Race Car Vehicle Dynamics》作者:William F. Miliken and Douglas L. MilikenSteering systemsIntroductionThis chapter begins with a discussion of steering geometry—casterangle ,trail ,kingpin inclination ,and scrub radius .The next section discuss Ackermann geometry followed by steering racks and gears .Ride steer (bump steer ) and roll steer are closely related to each other ;without compliance they would be thesame .Finally ,wheel alignment is discussed .this chapter is tied to chapter 17 on suspension geometry –when designing a new chassis ,steering and suspension geometry considerations are high priorities .19.1 steering geometryThe kingpin in a solid front axle is the steering pivot .In modern independent suspensions , introduced by Maurice olley at Cadillac in 1932,the kingpin is replaced by two (or more ) ball joints that define the steering axis .This axis is not vertical or centered on the tire contact patch for a number of reason .see figure 19.1 to clarify how kingpin location is measured .In front view ,the angle is called kingpin inclination and the offset of the steering axis from the center of the tire print measured along the ground is called scrub (or scrub radius ). The distance from the kingpin axis to the wheel center plane , measured horizontally at axle height ,is the spindle length .In side view the kingpin angle is called caster angle ; if the kingpin axis does not pass through the wheel center then side view kingpin offset is present ,as in most motorcycle front ends .The distance measured on the ground from the steering axis to the center of the tire print is the trail (called caster offset in ref .1 )Kingpin front view geometryAs mentioned in chapter 17, kingpin inclination ,spindle length ,and scrub are usually a compromise between packaging and performance requirements .Some factors to consider include :1.With a positive spindle length (virtually every car is positive as shown in figure 19.1) the car will be raised up as the wheels are steered away from center .The more the kingpin inclination is tilted from vertical the more the car will be raised when the front wheels are steered .This effect always raises the car , regardless of which direction the wheel is steered ,unless the kingpin inclination is truevertical .the effect is symmetric side to side only if there is no caster angle .See the following section on caster angle .For a given kingpin inclination ,a longer positive spindle length will increase the amount of lift with steer .2.The effect of kingpin inclination and spindle length in raising the front end ,by itself ,is to aid centering of the steering at low speed .At high speed any trail will probably swamp out the effect that raise ad fall have on centering .3. Kingpin inclination affects the steer –camber characteristic .when a wheel is steered ,it will lean out at the top ,toward positive camber ,if the kingpin is inclined in the normal direction (toward the center of the car at the upper end ). Positive camber results for both left– and right-hand steer .the amount of this effect is small ,but significant if the track includes tight turns.4. When a wheel is rolling over a bumpy road ,the rolling radius is constantly changing ,resulting in changes of wheel rotation speed . This gives rise to longitudinal forces at the wheel center .The reaction of these forces will introduce kickback into the steering in proportion to the spindle length .If the spindle length is zero then there will be no kick from this source .Design changes made in the last model of the GM “P ”car (fiero ) shortened the spindle length and this resulted in less wheel kickback on rough roads when compared to early model “P ”cars.5. The scrub radius shown in figure 19.1 is negative ,as used on front-wheel–drive cars (see below ) . driving or braking forces (at the ground ) introduce steer torques proportional to the scrub radius . If the driving or braking force is different on left and right wheels then there will be a net steering torque felt by the driver (assuming that the steering gear has good enough rev erse efficiency ).The only time that this is not true is with zero scrub (centerpoint steering ) because there is no moment arm for the drive (or brake ) force to generate torque about the kingpin .With very wide tires the tire forces often are not centered in the wheel center plane due to slight changes in camber ,road surface irregularities ,tire nonuniformity (conicity ),or other asymmetric effects .These asymmetries can cause steering kickback regardless of the front view geometry .Packaging requirements often conflict with centerpoint steering and many race cars operate more or less okay on smooth tracks with large amounts of scrub .6. For front drive ,a negative scrub radius has two strong stabilizingeffects :first ,fixed steering wheel –if one drive wheel loses traction ,the opposingwheel will toe –out an amount determined by the steer compliance in the system .This will tend to steer the car in a straight line ,even though the tractive force is not equal side-to –side and the unequal tractive force is applying a yaw moment to the vehicle .Second ,with good reverse efficiency the driver’s hands never truly fix the steering wheel . In this case the steering wheel may be turned by the effect of uneven longitudinal tractive forces ,increasing the stabilizing effect of the negative scrub radius .Under braking the same is true .Negative scrub radius tends to keep the car traveling straight even when the braking force is not equal on the left and right side front tiresome (due to differences in the roadway or the brakes).Caster angle and trailWith mechanical trail ,shown in figure 19.1,the tire print follows behind the steering axis in side view .Perhaps the simplest example is on an office chair caster–with any distance of travel ,the wheel aligns itself behind the point .More trail means that the tire side force has a large moment arm to act on the kingpin axis .This produces more self-centering effect and is the primary source of self-centering moment about the kingpin axis at speed .Some considerations for choosing the caster angle and trail are :1.More trail will give higher steering force .with all cars ,less trail will lower the steering force .In some cases ,manual steering can be used on heavy sedans (instead of power steering ) if the trail is reduced to almost zero .2.Caster angle ,like kingpin inclination ,cause the wheel to rise and fall with steer .unlike kingpin inclination ,the effect is opposite from side to side .With symmetric geometry (including equal positive caster on left and right wheels ) ,the effect of left steer is to roll the car to the right ,causing a diagonal weight shift .In this case ,more load will be carried on the LF –RR diagonal ,an oversteer effect in aleft-hand turn .The diagonal weight shift will be larger if stiffer springing is used because this is a geometric effect .The distance each wheel rises (or falls ) is constant but the weight jacking and chassis roll angle are functions of the front and rear roll stiffness. This diagonal load change can be measured with the car on scales and alignment ( weaver ) plates .Keep in mind that the front wheels are not steered very much in actual racing , except on the very tightest hairpin turns . For example , on a 100-ft .radius (a 40-50 mph turn ), a 10-ft. wheelbase neutral steer car needs only about 0.1rad .(5.7)of steer at the front wheels (with a 16:1steering ratio this is about 90degree at the steering wheel ).For cars that turn in one direction only , caster stagger (differences in left and right caster ) is used to cause the car to pull to one side due to the car seeking the lowest ride height . caster stagger will also affect the diagonal weight jacking effect mentioned above .If the caster is opposite (positive on one side and negative the same number of degrees on the other side ) then the front of the car will only rise and fall with steer ,no diagonal weight jacking will occur .3. Caster angle affects steer-camber but ,unlike kingpin inclination ,the effect is favorable . With positive caster angle the outside wheel will camber in a negative direction (top of the wheel toward the center of the car ) while the inside wheel cambers in a positive direction , again learning into the turn .In skid recovery , “opposite lock ” (steer out of the turn ) is used and in this case the steer–camber resulting from caster angle is in the “wrong ” direction for increased front tire grip . conveniently ,this condition results from very low lateral force at the rear so large amounts of front grip are not needed .4. As discussed in chapter 2, tires have pneumatic trail which effectively adds to (and at high slip Angles subtracts from ) the mechanical trail . This tire effect is nonlinear with lateral force and affects steering torque and driver feel .In particular , the fact that pneumatic trail approaches zero as the tire reaches the limit will result in lowering the self-centering torque and can be s signal to the driver that the tire is near breakaway .The pneumatic trail “breakaway signal” will be swamped out by mechanical trail if the mechanical trail is large compared to the pneumatic trail .5.Sometimes the trail is measured in a direction perpendicular to the steering axis (rather than horizontal as shown in figure 19.1) because this more accurately describes the lever (moment ) arm that connects the tire lateral forces to the kingpin . Tie rod locationNote that in figure 19.1 a shaded area is shown for the steering tie rod location . Camber compliance under lateral force is unavoidable and if the tie rod is located as noted ,the effect on the steering will be in the understeer ( steer out of the turn ) direction becomes much more complex than can be covered here .19.2 Ackerman steering geometryAs the front wheels of a vehicle are steered away from the straight-ahead position ,the design of the steering linkage will determine if the wheels stay parallel or if one wheel steers more than the other .This difference in steer Angles on the left and right wheels should not be confused with toe-in or toe-out which are adjustments and add to ( or subtract from ) Ackerman geometric effects .For low lateral acceleration usage (street cars) it is common to use Ackerman geometry . as seen on the left of figure 19.2, this geometry ensures that all the wheels roll freely with no slip Angles because the wheels are steered to track a common turn center . Note that at low speed all wheels are on a significantly different radius , the inside front wheel must steer more than the outer front wheel . A reasonable approximation to this geometry may be as shown in figure 19.3.According to ref .99, Rudolf Ackerman patented the double pivot steering system in 1817 and in 1878, Charles Jeantaud added the concept mentioned above to eliminate wheel scrubbing when cornering . Another reason for Ackermann geometry ,mentioned by Maurice olley , was to keep carriage wheels from upsetting smooth gravel driveways .High lateral accelerations change the picture considerably . Now the tires alloperate at significant slip Angles and the loads on the inside track are less than on the outside track . Looking back to the tire performance curves ,it is seen that less slip angle is required at lighter loads to reach the peak of the cornering force to a higher slip angle than required for maximum side force . Dragging the inside tire along at high slip Angles ( above for peak lateral force ) raise the tire temperature and slows the car down due to slip angle ( induced ) drag .For racing , it is common to use parallel steering or even reverse Ackermann as shown on the center and right side of figure 19.2.It is possible to calculate the correct amount of reverse Ackermann if the tire properties and loads are known . In most cases the resulting geometry is found to be too extreme because the car must also be driven (or pushed ) at low speeds , for example in the pits .Another point to remember is that most turns in racing have a fairly large radius and the Ackermann effect is very small . In fact , unless the steering system and suspension are very stiff ,compliance (deflection ) under cornering loads may steer the wheels more than any Ackermann (or reverse Ackermann ) built into the geometry .The simplest construction that generates Ackermannn geometry is shown in figure 19.3 fo r “rear steer ” . Here ,the rack (cross link or relay rod in steering box systems ) is located behind the front axle and lines staring at the kingpin axis , extended through the outer tie rod ends , intersect in the center of the rear axle . The angularity of the steering knuckle will cause the inner wheel to steer more than the outer (toe-out on turning ) and a good approximation of “perfect Ackermann ” will be achieved .The second way to design-in differences between inner and outer steer Angles is by moving the rack (or cross link ) forward or backward so that it is no longer on a line directly connecting the two outer tie rod ball joints .This is shown in figure 19.4. with “rear steer ” , as shown in the figure ,moving the rack forward will tend mo re toward parallel steer (and eventually reverse Ackermann ), and moving it toward the rear of the car will increase the toe-out on turning .A third way to generate toe with steering is simply to make the steering arms different lengths . A shorter steering arm (as measured from the kingpin axis to the outer tie rod end ) will be steered through a larger angle than one with a longer knuckle. Of course this effect is asymmetric and applies only to cars turning in one direction—oval track cars .RecommendationWith the conflicting requirements mentioned above , the authors feel that parallel steer or a bit of reverse Ackermann is a reasonable compromise . With parallel steer , the car will be somewhat difficult to push through the pits because the front wheels will be fighting each other . at racing speeds , on large-radius turns , the front wheels are steered very little , thus any ackermann effects will not have a large effect on the individual wheel slip angles , relative to a reference steer angle , measured at the centerline of the car .文献翻译摘自《Race Car Vehicle Dynamics》第19章转向系统序言:本章以转向几何参数的讨论为开始,包括主销后倾角,后倾拖距,主销内倾角,主销偏置量。
汽车转向器外文翻译

附录Hyundai Motor on the steering control of the request is lightweight, safe, reliable, and should have sufficient life. In order to meet these requirements, the design of the steering gear should have a reasonable transmission ratio characteristics, the correct gap eating together, a higher transmission efficiency, sufficient rigidity and strength. If the steering gear in the design is reasonable, then the product is good and bad parts of the key issues of manufacturing and assembly. How to control the quality of the product? The key problem is that a reasonable detection methods, the key to strictly control the passing rate of time, such products will be able to guarantee the quality of parts and components. First of all, the quality of shifting ASSY, should control the assembly and to ensure that turning the steering shaft torque and rotational axis and the transmission gap between components. Followed by testing the performance of steering gear, steering gear must also be adopted by all types of test-bed to verify the established angle transmission ratio, transmission efficiency, rotational torque, rigid. In addition to examination other than the above-mentioned steering performance, but also in the pilot stage of its life nuclear reliability and life expectancy that is static torsion test: a thin red hammer, hit test, fatigue life test. To determine whether the quality of the product in hand national standards. Noise from the steering angle repair cream, which is also a test method to detect and can learn from the J class machinery manufacturing industry in China''in the past only means to recognize the importance of detection, and the lack of''lack of testing and testing of the poor law awareness. So have some of the parts is a qualified products l materials, and assembly of products from the pilot test proved to be defective, or: The test can verify the quality of products and design for the steering gear (1) the accuracy of parts of the foot only, finish second, two-phase - the location of the elite "Measuring the content of L ①steering shaft loaded journal bearings Department feet 'inch accuracy and smoothness, anti-worm or worm-inch accuracy, smoothness and surface hardness and magnetic → for testing; ②steering vertical axis arm journal dimensional accuracy and smoothness, the worm wheel roller bearing of the journal center hole distance, wheel bearing and the journal''hole angle from the Chinese side, the block size, finish and degree of asymmetry; ③circulating balltooth-type radial fan, big-law length, journal hardness, the magnetic; ④browser to Min Xuan cochlear aperture wheel size precision, smoothness, tooth surface roughness, intermediate thick teeth, tooth, tooth degree of asymmetry; ⑤ball rolling circle diameter, smooth, cylindrical roller Road''degree of accuracy and bias, raceway adjacent pitch error, cumulative error section of grass lines and sub-rack section from Rolling Road Center, rack section Road center line and the roll of injustice: line degrees; ® carburizing layer thickness, hardness; magnetic flaw detection; ⑦shift steering shaft shell aperture, roughness, different degree of heart; ⑧shift towards vertical axis aperture arm flying finish, different degree of heart; ⑨chaos and steering shaft steering arm hole down the center distance, steering shaft-hole axes and steering arm hole down the center line of the non-verticality(2) parts of cleanliness. Detection of the site is turning - browser shell surface and the surface parts.Detection method is to use cleaning fluid to clean parts, and then the cleaning fluid with impurities, and vacuum membrane leaching; further 120 weeks of petrol industrial solvents the membrane will be washed with impurities. To be volatile after the membrane cleaning fluid, together with the impurities from weighing, with the magnet cellophane packets are sorted in the iron impurities, said the weight of a scrap-iron. The iron filings and then 40 times on the microscope with a disability in most dogs measured particle size (length X width).(3) assembly of the leakage. Does not allow any leakage of the phenomenon of steering. Because of internal lubricants in the steering gear is used to turn parts lubricated friction pair, and if as a result of damage caused by leaking seals, lubrication will be affected, resulting in increased friction and wear parts and reduce the life span of steering gear; transmission efficiency at the same time will lower.The use of conventional vibration and temperature +40 ° C under the conditions of inspection, the shell and shell cap shaft oil seal joints as well as whether the spill, and water to observe whether there are leakages.(4) after a good tune steering assembly should check the technical requirements flexible and comfortable when turning the steering wheel, there is no axial gap I turn the steering wheel of the total value of the number required to turn around a few cars in line with the original request. Steering gear shift, also known as machine, machine direction, which is steering the mostimportant parts. Its role is to: increase the spread to turn steering wheel and transmission mechanism to change the direction of power transfer.Hydraulic Steering Hydraulic steering vehicles are widely used in marine hydraulic steering and rudder. Drivers can be used through its ability to manipulate smaller shift power to achieve greater control and performance of safe, reliable, flexible manipulation, light.The manipulation of steering is hydraulic, that is in the steering column and steering wheel there is no mechanical connection between the steering gear is between the fuel tank and steering hydraulic pipes or hoses link.When turning the steering wheel, steering wheel rotation in accordance with the relative proportion of transport fuel, the fuel tank directly into the corresponding control side, while the other side of the oil back to tank.BZZ steering is a switch-type full-hydraulic steering valve with the following characteristics: the elimination of mechanical linkage device, the host can reduce costs, provide a reliable, lightweight structures, manipulation of a flexible lightweight, safe, reliable, and can be very small continuous torque stepless control of rotation, provided to the control loop, as well as a wide range of host size choice, able to shift and a variety of pumps and hydraulic supply system.Steering by the structure can be divided into many types. History, there have been many forms of steering, there is currently more commonly used rack and pinion, worm means crank pins, recycling the ball - rack fan gear type, recycling the ball crank pins means, such as worm-type wheel. The second, fourth, respectively, is the first, the third form of the deformation, and the worm wheel is even more rare type. If the form in accordance with assistance, but also can be divided into mechanical (no help), and power-style (with help) two types of power steering which can be divided into pressure and motivation, hydraulic-power, electric power-type, electro-hydraulic power types of blocks. 1) It is a rack and pinion of steering one of the most common. The basic structure is a pair of mutually meshing rack and pinion. Pinion steering drive shaft rotates, rack linear motion would be done. In some cases, directly driven by the rack cross-bar, you can make of steering wheel shift. So, this is one of the most simple steering. Its advantage is simple structure, low-cost, steering sensitivity, small size, can be directly cross-link. In widely used vehicle.It is a worm for the active parts, crank pin for the steering gear follower. Worm has a trapezoidalthread, referring to a finger-shaped pin with tapered bearings in the crank bearings, the crank shaft and the shift into one arm. Shifted through steering wheel rotating worm, helical worm embedded in the cone-shaped slot means the marketing side of the rotation, the side rocker shaft to do around the shifted arc movement, thereby stimulating and steering crank arm swing down and then turning to make shift transmission wheel deflection. This steering is usually used to turn power on a larger truck.Circulating ball-type: This device is turned by the gear mechanism from the steering wheel to slow down the rotation of power, so that the rotation of steering wheel movement into rotary movement of the turbine worm, ball screw and nut holding the ball engagement, which Ball screw linear motion into rotary movement, with the fan-shaped nut meshing gears, linear motion into rotary movement again to shake the rod arm, link arm moving again so that even the bar and cross bar to do a straight-line movement to change the wheels direction. This is a classical institutions, most modern cars no longer have to use, but the way was the latest by the application of power steering device. It is equivalent to the principle use of nuts and bolts in the rotation process of relative movement, and in between the thread and thread the ball into the folder to reduce the resistance, all the ball, both connected in a closed loop of the spiral curve rolling ball club is named after the cycle.Hydraulic rack and pinion steering gear is relative to the case of rack and pinion steering gear machinery, mainly to increase the steering pump, steering oiler, steering pipeline, steering valve, steering components, such as fuel tanks, with a view to improve the pilot hand, the purpose of increasing power steering of the steering device. After 10 years of internal development, has become a mature R & D and manufacturing technology manufacturers have Yubei Koyo Steering Gear Co., Ltd. and other enterprises. [1] With the rapid development of automobile industry, as well as for comfort, safety and continuous improvement in performance, steering systems are also changing with the advance of technology. For the time being, electric power steering system is turning the forefront of the industry research projects, in accordance with its distribution of the form of string can be divided into power, gear Power, power rack, power bar, the form of electro-hydraulic power. Ago in some sci-fi movies of the unmanned aircraft can occur, such as unmanned aerial vehicle is now a reality, steering systems are moving in the direction of the development of more advanced, such as research and development from Japan JTEKT advancedby the steer-by-wire systems.In this paper, choice-based recycling the ball GX1608A gear - steering rack as a research topic, its main contents are: knowledge of automotive steering gear, ball-type steering gear cycle of the main parameters and design choices. Design also includes the shift rocker shaft, involute spline, fan gear shaft and screw shaft design and verification. According to its own independent study completed by the steering shaft and screw shaft rocker design and verification, in other parts of the network, as well as through the school library to collect relevant information and fax to the future, in the papers have used information the mark.The design has been through a total of about 16 Chinese and foreign-related literature, and learn from the relevant parts of which the essence of the final design of the times. Because of its limited ability to learn and, I urge teachers and experts have pointed out that less than one.现代汽车对转向器的要求是操纵轻便,安全、可靠,并应具有足够的使用寿命。
汽车转向装置是怎样工作的外文文献翻译、中英外文翻译、外文翻译

HOW CAR STEERING WORKSYou know that when you turn the steering wheel in your car, the wheels turn. Cause and effect, right? But a lot of interesting stuff goes on between the steering wheel and the tires to make this happen.In this article, we'll see how the two most common types of car steering systems work: rack-and-pinion and recirculating-ball steering. Then we'll examine power steering and find out about some interesting future developments in steering systems, driven mostly by the need to increase the fuel efficiency of cars. But first, let's see what you have to do turn a car. It's not quite as simple as you might think! recirculating ball.You might be surprised to learn that when you turn your car, your front wheels are not pointing in the same direction.For a car to turn smoothly, each wheel must follow a different circle. Since the inside wheel is following a circle with a smaller radius, it is actually making a tighter turn than the outside wheel. If you draw a line perpendicular to each wheel, the lines will intersect at the center point of the turn. The geometry of the steering linkage makes the inside wheel turn more than the outside wheel.There are a couple different types of steering gears. The most common are rack-and-pinion andRack-and-pinion steeringRack-and-pinion steering is quickly becoming the most common type of steering on cars, small trucks and SUVs. It is actually a pretty simple mechanism. A rack-and-pinion gearset is enclosed in a metal tube, with each end of the rack protruding from the tube. A rod, called a tie rod, connects to each end of the rack.The pinion gear is attached to the steering shaft. When you turnthe steering wheel, the gear spins, moving the rack. The tie rod at each end of the rack connects to the steering arm on the spindle (see diagram above).The rack-and-pinion gearset does two things: It converts the rotational motion of the steering wheel into the linear motion needed to turn the wheels. It provides a gear reduction, making it easier to turn the wheels.On most cars, it takes three to four complete revolutions of the steering wheel to make the wheels turn from lock to lock (from far left to far right).The steering ratio is the ratio of how far you turn the steering wheel to how far the wheels turn. For instance, if one complete revolution (360 degrees) of the steering wheel results in the wheels of the car turning 20 degrees, then the steering ratio is 360 divided by 20, or 18:1.A higher ratio means that you have to turn the steering wheel more to get the wheels to turn a given distance. However, less effort is required because of the higher gear ratio. Generally, lighter, sportier cars have lower steering ratios than larger cars and trucks. The lower ratio gives the steering a quicker response -- you don't have to turn the steering wheel as much to get the wheels to turn a given distance -- which is a desirable trait in sports cars. These smaller cars are light enough that even with the lower ratio, the effort required to turn the steering wheel is not excessive.Some cars have variable-ratio steering, which uses a rack-and-pinion gearset that has a different tooth pitch (number of teeth per inch) in the center than it has on the outside. This makes the car respond quickly when starting a turn (the rack is near the center), and also reduces effort near the wheel's turning limits.Power Rack-and-pinionWhen the rack-and-pinion is in a power-steering system, the rack has a slightly different design. Part of the rack contains a cylinder witha piston in the middle. The piston is connected to the rack. There are two fluid ports, one on either side of the piston. Supplying higher-pressure fluid to one side of the piston forces the piston to move, which in turn moves the rack, providing the power assist.We'll check out the components that provide the high-pressure fluid, as well as decide which side of the rack to supply it to, later in the article. First, let's take a look at another type of steering.Recirculating-ball SteeringRecirculating-ball steering is used on many trucks and SUVs today. The linkage that turns the wheels is slightly different than on a rack-and-pinion system.The recirculating-ball steering gear contains a worm gear. You can image the gear in two parts. The first part is a block of metal with a threaded hole in it. This block has gear teeth cut into the outside of it, which engage a gear that moves the pitman arm (see diagram above). The steering wheel connects to a threaded rod, similar to a bolt, that sticks into the hole in the block. When the steering wheel turns, it turns the bolt. Instead of twisting further into the block the way a regular bolt would, this bolt is held fixed so that when it spins, it moves the block, which moves the gear that turns the wheels.Instead of the bolt directly engaging the threads in the block, all of the threads are filled with ball bearings that recirculate through the gear as it turns. The balls actually serve two purposes: First, they reduce friction and wear in the gear; second, they reduce slop in the gear. Slop would be felt when you change the direction of the steering wheel -- without the balls in the steering gear, the teeth would come out of contact with each other for a moment, making the steering wheel feel loose.Power steering in a recirculating-ball system works similarly to a rack-and-pinion system. Assist is provided by supplying higher-pressure fluid to one side of the block.Now let's take a look at the other components that make up a power-steering system.Power SteeringThere are a couple of key components in power steering in addition to the rack-and-pinion or recirculating-ball mechanism.PumpThe hydraulic power for the steering is provided by a rotary-vane pump (see diagram below). This pump is driven by the car's engine via a belt and pulley. It contains a set of retractable vanes that spin inside an oval chamber. As the vanes spin, they pull hydraulic fluid from the return line at low pressure and force it into the outlet at high pressure. The amount of flow provided by the pump depends on the car's engine speed. The pump must be designed to provide adequate flow when the engine is idling. As a result, the pump moves much more fluid than necessary when the engine is running at faster speeds. The pump contains a pressure-relief valve to make sure that the pressure does not get too high, especially at high engine speeds when so much fluid is being pumped.Rotary ValveA power-steering system should assist the driver only when he is exerting force on the steering wheel (such as when starting a turn). When the driver is not exerting force (such as when driving in a straight line), the system shouldn't provide any assist. The device that senses the force on the steering wheel is called the rotary valve.The key to the rotary valve is a torsion bar. The torsion bar is a thin rod of metal that twists when torque is applied to it. The top of the bar is connected to the steering wheel, and the bottom of the bar is connected to the pinion or worm gear (which turns the wheels), so the amount of torque in the torsion bar is equal to the amount of torque thedriver is using to turn the wheels. The more torque the driver uses to turn the wheels, the more the bar twists.The input from the steering shaft forms the inner part of a spool-valve assembly. It also connects to the top end of the torsion bar. The bottom of the torsion bar connects to the outer part of the spool valve. The torsion bar also turns the output of the steering gear, connecting to either the pinion gear or the worm gear depending on which type of steering the car has.As the bar twists, it rotates the inside of the spool valve relative to the outside. Since the inner part of the spool valve is also connected to the steering shaft (and therefore to the steering wheel), the amount of rotation between the inner and outer parts of the spool valve depends on how much torque the driver applies to the steering wheel.When the steering wheel is not being turned, both hydraulic lines provide the same amount of pressure to the steering gear. But if the spool valve is turned one way or the other, ports open up to provide high-pressure fluid to the appropriate line.It turns out that this type of power-steering system is pretty inefficient. Let's take a look at some advances we'll see in coming years that will help improve efficiency.The Future of Power SteeringSince the power-steering pump on most cars today runs constantly, pumping fluid all the time, it wastes horsepower. This wasted power translates into wasted fuel. You can expect to see several innovations that will improve fuel economy. One of the coolest ideas on the drawing board is the "steer-by-wire" or "drive-by-wire" system. These systems would completely eliminate the mechanical connection between the steering wheel and the steering, replacing it with a purely electronic control system. Essentially, the steering wheel would work like the one you can buy foryour home computer to play games. It would contain sensors that tell the car what the driver is doing with the wheel, and have some motors in it to provide the driver with feedback on what the car is doing. The output of these sensors would be used to control a motorized steering system. This would free up space in the engine compartment by eliminating the steering shaft. It would also reduce vibration inside the car.General Motors has introduced a concept car, the Hy-wire, that features this type of driving system. One of the most exciting things about the drive-by-wire system in the GM Hy-wire is that you can fine-tune vehicle handling without changing anything in the car's mechanical components -- all it takes to adjust the steering is some new computer software. In future drive-by-wire vehicles, you will most likely be able to configure the controls exactly to your liking by pressing a few buttons, just like you might adjust the seat position in a car today. It would also be possible in this sort of system to store distinct control preferences for each driver in the family.In the past fifty years, car steering systems haven't changed much. But in the next decade, we'll see advances in car steering that will result in more efficient cars and a more comfortable ride. For more information on steering systems and related topics, check out the links on the next page.汽车转向装置是怎样工作的当你转动汽车的方向盘时,为什么车轮会转动呢?我们可以在方向盘和使之转动的车轮之间发现一些有意思的东西。
汽车对转向器外文翻译

附录Hyundai Motor on the steering control of the request is lightweight, safe, reliable, and should have sufficient life. In order to meet these requirements, the design of the steering gear should have a reasonable transmission ratio characteristics, the correct gap eating together, a higher transmission efficiency, sufficient rigidity and strength. If the steering gear in the design is reasonable, then the product is good and bad parts of the key issues of manufacturing and assembly. How to control the quality of the product? The key problem is that a reasonable detection methods, the key to strictly control the passing rate of time, such products will be able to guarantee the quality of parts and components. First of all, the quality of shifting ASSY, should control the assembly and to ensure that turning the steering shaft torque and rotational axis and the transmission gap between components. Followed by testing the performance of steering gear, steering gear must also be adopted by all types of test-bed to verify the established angle transmission ratio, transmission efficiency, rotational torque, rigid. In addition to examination other than the above-mentioned steering performance, but also in the pilot stage of its life nuclear reliability and life expectancy that is static torsion test: a thin red hammer, hit test, fatigue life test. To determine whether the quality of the product in hand national standards.Noise from the steering angle repair cream, which is also a test method to detect and can learn from the J class machinery manufacturing industry in China''in the past only means to recognize the importance of detection, and the lack of''lack of testing and testing of the poor law awareness. So have some of the parts is a qualified products l materials, and assembly of products from the pilot test proved to be defective, or: The test can verify the quality of products and design for the steering gear (1) the accuracy of parts of the foot only, finish second, two-phase - the location of the elite "Measuring the content of L ①steering shaft loaded journal bearings Department feet 'inch accuracy and smoothness, anti-worm or worm-inch accuracy, smoothness and surface hardness and magnetic → for testing; ②steering vertical axis arm journal dimensional accuracy and smoothness, the worm wheel roller bearing of the journal center hole distance, wheel bearing and the journal''hole angle from the Chinese side, the block size, finish and degree of asymmetry; ③circulating ball tooth-type radial fan, big-law length, journal hardness, the magnetic; ④browser to MinXuancochlear aperture wheel size precision, smoothness, tooth surface roughness, intermediate thick teeth, tooth, tooth degree of asymmetry; ⑤ball rolling circle diameter, smooth, cylindrical roller Road''degree of accuracy and bias, raceway adjacent pitch error, cumulative error section of grass lines and sub-rack section from Rolling Road Center, rack section Road center line and the roll of injustice: line degrees; ® carburizing layer thickness, hardness; magnetic flaw detection;⑦shift steering shaft shell aperture, roughness, different degree of heart; ⑧shift towards vertical axis aperture arm flying finish, different degree of heart; ⑨chaos and steering shaft steering arm hole down the center distance, steering shaft-hole axes and steering arm hole down the center line of the non-verticality(2) parts of cleanliness. Detection of the site is turning - browser shell surface and the surface parts. Detection method is to use cleaning fluid to clean parts, and then the cleaning fluid with impurities, and vacuum membrane leaching; further 120 weeks of petrol industrial solvents the membrane will be washed with impurities. To be volatile after the membrane cleaning fluid, together with the impurities from weighing, with the magnet cellophane packets are sorted in the iron impurities, said the weight of a scrap-iron. The iron filings and then 40 times on the microscope with a disability in most dogs measured particle size (length X width).(3) assembly of the leakage. Does not allow any leakage of the phenomenon of steering. Because of internal lubricants in the steering gear is used to turn parts lubricated friction pair, and if as a result of damage caused by leaking seals, lubrication will be affected, resulting in increased friction and wear parts and reduce the life span of steering gear; transmission efficiency at the same time will lower.The use of conventional vibration and temperature +40 ° C under the conditions of inspection, the shell and shell cap shaft oil seal joints as well as whether the spill, and water to observe whether there are leakages.(4) after a good tune steering assembly should check the technical requirements flexible and comfortable when turning the steering wheel, there is no axial gap I turn the steering wheel of the total value of the number required to turn around a few cars in line with the original request. Steering gear shift, also known as machine, machine direction, which is steering the most important parts. Its role is to: increase the spread to turn steering wheel and transmission mechanism to change the direction of power transfer.Hydraulic Steering Hydraulic steering vehicles are widely used in marine hydraulic steering and rudder. Drivers can be used through its ability to manipulate smaller shift power to achieve greater control and performance of safe, reliable, flexible manipulation, light.The manipulation of steering is hydraulic, that is in the steering column and steering wheel there is no mechanical connection between the steering gear is between the fuel tank and steering hydraulic pipes or hoses link.When turning the steering wheel, steering wheel rotation in accordance with the relative proportion of transport fuel, the fuel tank directly into the corresponding control side, while the other side of the oil back to tank.BZZ steering is a switch-type full-hydraulic steering valve with the following characteristics: the elimination of mechanical linkage device, the host can reduce costs, provide a reliable, lightweight structures, manipulation of a flexible lightweight, safe, reliable, and can be very small continuous torque stepless control of rotation, provided to the control loop, as well as a wide range of host size choice, able to shift and a variety of pumps and hydraulic supply system.Steering by the structure can be divided into many types. History, there have been many forms of steering, there is currently more commonly used rack and pinion, worm means crank pins, recycling the ball - rack fan gear type, recycling the ball crank pins means, such as worm-type wheel. The second, fourth, respectively, is the first, the third form of the deformation, and the worm wheel is even more rare type. If the form in accordance with assistance, but also can be divided into mechanical (no help), and power-style (with help) two types of power steering which can be divided into pressure and motivation, hydraulic-power, electric power-type, electro-hydraulic power types of blocks. 1) It is a rack and pinion of steering one of the most common. The basic structure is a pair of mutually meshing rack and pinion. Pinion steering drive shaft rotates, rack linear motion would be done. In some cases, directly driven by the rack cross-bar, you can make of steering wheel shift. So, this is one of the most simple steering. Its advantage is simple structure, low-cost, steering sensitivity, small size, can be directly cross-link. In widely used vehicle.It is a worm for the active parts, crank pin for the steering gear follower. Worm has a trapezoidal thread, referring to a finger-shaped pin with tapered bearings in the crank bearings, the crank shaft and the shift into one arm. Shifted through steering wheel rotating worm, helical worm embeddedin the cone-shaped slot means the marketing side of the rotation, the side rocker shaft to do around the shifted arc movement, thereby stimulating and steering crank arm swing down and then turning to make shift transmission wheel deflection. This steering is usually used to turn power on a larger truck.Circulating ball-type: This device is turned by the gear mechanism from the steering wheel to slow down the rotation of power, so that the rotation of steering wheel movement into rotary movement of the turbine worm, ball screw and nut holding the ball engagement, which Ball screw linear motion into rotary movement, with the fan-shaped nut meshing gears, linear motion into rotary movement again to shake the rod arm, link arm moving again so that even the bar and cross bar to do a straight-line movement to change the wheels direction. This is a classical institutions, most modern cars no longer have to use, but the way was the latest by the application of power steering device. It is equivalent to the principle use of nuts and bolts in the rotation process of relative movement, and in between the thread and thread the ball into the folder to reduce the resistance, all the ball, both connected in a closed loop of the spiral curve rolling ball club is named after the cycle.Hydraulic rack and pinion steering gear is relative to the case of rack and pinion steering gear machinery, mainly to increase the steering pump, steering oiler, steering pipeline, steering valve, steering components, such as fuel tanks, with a view to improve the pilot hand, the purpose of increasing power steering of the steering device. After 10 years of internal development, has become a mature R & D and manufacturing technology manufacturers have Yubei Koyo Steering Gear Co., Ltd. and other enterprises. [1] With the rapid development of automobile industry, as well as for comfort, safety and continuous improvement in performance, steering systems are also changing with the advance of technology. For the time being, electric power steering system is turning the forefront of the industry research projects, in accordance with its distribution of the form of string can be divided into power, gear Power, power rack, power bar, the form of electro-hydraulic power. Ago in some sci-fi movies of the unmanned aircraft can occur, such as unmanned aerial vehicle is now a reality, steering systems are moving in the direction of the development of more advanced, such as research and development from Japan JTEKT advanced by the steer-by-wire systems.In this paper, choice-based recycling the ball GX1608A gear - steering rack as a research topic, itsmain contents are: knowledge of automotive steering gear, ball-type steering gear cycle of the main parameters and design choices. Design also includes the shift rocker shaft, involute spline, fan gear shaft and screw shaft design and verification. According to its own independent study completed by the steering shaft and screw shaft rocker design and verification, in other parts of the network, as well as through the school library to collect relevant information and fax to the future, in the papers have used information the mark.The design has been through a total of about 16 Chinese and foreign-related literature, and learn from the relevant parts of which the essence of the final design of the times. Because of its limited ability to learn and, I urge teachers and experts have pointed out that less than one.现代汽车对转向器的要求是操纵轻便,安全、可靠,并应具有足够的使用寿命。
转向器英文文献翻译

1 英文文献翻译1.1 Electronic power steering systemWhat it is:Electrically powered steering uses an electric motor to drive either the power steering hydraulic pump or the steering linkage directly. The power steering function is therefore independent of engine speed, resulting in significant energy savings.How it works :Conventional power steering systems use an engine accessory belt to drive the pump, providing pressurized fluid that operates a piston in the power steering gear or actuator to assist the driver.In electro-hydraulic steering, one electrically powered steering concept uses a high efficiency pump driven by an electric motor. Pump speed is regulated by an electric controller to vary pump pressure and flow, providing steering efforts tailored for different drivingsituations. The pump can be run at low speed or shut off to provide energy savings during straight ahead driving (which is most of the time in most world markets).Direct electric steering uses an electric motor attached to the steering rack via a gear mechanism (no pump or fluid). A variety of motor types and gear drives is possible. A microprocessor controls steering dynamics and driver effort. Inputs include vehicle speed and steering, wheel torque, angular position and turning rate.Working In Detail:A "steering sensor" is located on the input shaft where it enters the gearbox housing. The steering sensor is actually sensors in one: a "torque sensor" that converts steering torque input and its direction into voltage signals, and a "rotation sensor" that converts the rotation speed and direction into voltage signals. An "interface" circuit that shares the same housing converts the signals from the torque sensor and rotation sensor into signals the control electronics can process.Inputs from the steering sensor are digested by a microprocessor control unit that also monitors input from the vehicle's speed sensor. The sensor inputs are then compared to determine how much power assist is required according to a preprogrammed "force map" in the control unit's memory. The control unit then sends out the appropriate command to the "power unit" which then supplies the electric motor with current. The motor pushes the rack to the right or left depending on which way the voltage flows (reversing the current reverses the direction the motor spins). Increasing the current to the motor increases the amount of power assist.The system has three operating modes: a "normal" control mode in which left or right power assist is provided in response to input from the steering torque and rotation sensor's inputs; a "return" control mode which is used to assist steering return after completing a turn; and a "damper" control mode that changes with vehicle speed to improve road feel and dampen kickback.If the steering wheel is turned and held in the full-lock position and steering assist reaches a maximum, the control unit reduces current to the electric motor to prevent an overload situation that might damage the motor. The control unit is also designed to protect the motor against voltage surges from a faulty alternator or charging problem.The electronic steering control unit is capable of self-diagnosing faults by monitoring the system's inputs and outputs, and the driving current of the electric motor. If a problem occurs, the control unit turns the system off by actuating a fail-safe relay in the power unit. This eliminates all power assist, causing the system to revert back to manual steering. A dash EPS warning light is also illuminated to alert the driver. To diagnose the problem, a technician jumps the terminals on the service check connector and reads out the trouble codes.click here to see a biggerElectric power steering systems promise weight reduction, fuel savings and package flexibility, at no cost penalty.Europe's high fuel prices and smaller vehicles make a fertile testbed for electric steering, a technology that promises automakers weight savings and fuel economy gains. And in a short time, electric steering will make it to the U.S., too. "It's just just a matter of time," says Aly Badawy, director of research and development for Delphi Saginaw Steering Systems in Saginaw, Mich. "The issue was cost and that's behind us now. By 2002 here in the U.S. the cost of electric power steering will absolutely be a wash over hydraulic."Today, electric and hybrid-powered vehicles (EV), including Toyota's Prius and GM's EV-1, are the perfect domain for electric steering. But by 2010, a TRW Inc. internal study estimates that oneout of every three cars produced in the world will be equipped with some form of electrically-assisted steering. The Cleveland-based supplier claims its new steering systems could improve fuel economy by up to 2 mpg, while enhancing handling. There are true bottom-line benefits as well for automakers by reducing overall costs and decreasing assembly time, since there's no need for pumps, hoses and fluids.Another claimed advantage is shortened development time. For instance, a Delphi group developed E-TUNE, a ride-and-handling software package that can be run off a laptop computer. "They can take that computer and plug it in, attach it to the controller and change all the handling parameters -- effort level, returnability, damping -- on the fly," Badawy says. "It used to take months." Delphi has one OEM customer that should start low-volume production in '99.Electric steering units are normally placed in one of three positions: column-drive, pinion-drive and rack-drive. Which system will become the norm is still unclear. Short term, OEMs will choose the steering system that is easiest to integrate into an existing platform. Obviously, greater potential comes from designing the system into an all-new platform."We have all three designs under consideration," says Dr. Herman Strecker, group vice president of steering systems division at ZF in Schwaebisch Gmuend, Germany. "It's up to the market and OEMs which version finally will be used and manufactured.""The large manufacturers have all grabbed hold of what they consider a core technology," explains James Handysides, TRW vice president, electrically assisted steering in Sterling Heights, Mich.His company offers a portfolio of electric steering systems (hybrid electric, rack-, pinion-, and column-drive). TRW originally concentrated on what it still believes is the purest engineering solution for electric steering--the rack-drive system. The system is sometimes refered to as direct drive or ball/nut drive.Still, this winter TRW hedged its bet, forming a joint venture with LucasVarity. The British supplier received $50 million in exchange for its electric column-drive steering technology and as sets. Initial production of the column and pinion drive electric steering systems is expected to begin in Birmingham, England, in 2000."What we lack is the credibility in the steering market," says Brendan Conner, managing director, TRW/LucasVarity Electric Steering Ltd. "The combination with TRW provides us with a good opportunity for us to bridge that gap." LucasVarity currently has experimental systems on 11 different vehicle types, mostly European. TRW is currently supplying its EAS systems for Ford and Chrysler EVs in North America and for GM's new Opel Astra.In 1995, according to Delphi, traditional hydraulic power steering systems were on 7596 of all vehicles sold globally. That 37-million vehicle pool consumes about 10 million gallons in hydraulic fluid that could be superfluous, if electric steering really takes off.The present invention relates to an electrically powered drive mechamsm for providing powered assistance to a vehicle steering mechanism. According to one aspect of the present invention, there is provided an electrically powered driven mechanism for providingpowered assistance to a vehicle steering mechanism having a manually rotatable member for operating the steering mechanism, the drive mechanism including a torque sensor operable to sense torque being manually applied to the rotatable member, an electrically powered drive motor drivingly connected to the rotatable member and a controller which is arranged to control the speed and direction of rotation of the drive motor in response to signals received from the torque sensor, the torque sensor including a sensor shaft adapted for connection to the rotatable member to form an extension thereof so that torque is transmitted through said sensor shaft when the rotatable member is manually rotated and a strain gauge mounted on the sensor shaft for producing a signal indicative of the amount of torque being transmitted through said shaft.Preferably the sensor shaft is non-rotatably mounted at one axial end in a first coupling member and is non-rotatably mounted at its opposite axial end in a second coupling member, the first and second coupling members being inter-engaged to permit limited rotation there between so that torque under a predetermined limit is transmitted by the sensor shaft only and so that torque above said predetermined limit is transmitted through the first and second coupling members.The first and second coupling members are preferably arranged to act as a bridge for drivingly connecting first and second portions of the rotating member to one another.Preferably the sensor shaft is of generally rectangular cross-section throughout the majority of its length.Preferably the strain gauge includes one or more SAW resonators secured to the sensor shaft.Preferably the motor is drivingly connected to the rotatable member via a clutch.Preferably the motor includes a gear box and is concentrically arranged relative to the rotatable member.Various aspects of the present invention will hereafter be described, with reference to the accompanying drawings,in which :Figure 1 is a diagrammatic view of a vehicle steering mechanism including an electrically powered drive mechanism according to the present invention,Figure 2 is a flow diagram illustrating interaction between various components of the drive mechanism shown in Figure 1 ,Figure 3 is an axial section through the drive mechanism shown in Figure 1, Figure 4 is a sectional view taken along lines IV-IV in Figure 3,Figure 5 is a more detailed exploded view of the input drives coupling shown in Figure 3, and Figure 6 is a more detailed exploded view of the clutch showing in Figure 3. Referring initially to Figure 1, there is shown a vehicle steering mechanism 10 drivingly connected to a pair of steerable road wheels.The steering mechanism 10 shown includes a rack and pinion assembly 14 connected to the road wheels 12 via joints 15. The pinion(not shown) of assembly 14 is rotatably driven by a manually rotatable member in the form of a steering column 18 which is manually rotated by a steering wheel 19.The steering column 18 includes an electric powered drive mechanism 30 which includes an electric drive motor (not shown in Figure 1) for driving the pinion in response to torque loadings in the steering column 18 in order to provide power assistance for the operative when rotating the steering wheel 19.As schematically illustrated in Figure 2, the electric powered drive mechanism includes a torque sensor20 which measures the torque applied by the steering column 18 when driving the pinion and supplies a signal to a controller 40.The controller 40 is connected to a drive motor 50 and controls the electric current supplied to the motor 50 to control the amount of torque generated by the motor 50 and the direction of its rotation.The motor 50 is drivingly connected to the steering column 18 preferably via a gear box 60, preferably an epicyclic gear box, and a clutch 70. The clutch 70 is preferably permanently engaged during normal operation and is operative undercertain conditions to isolate drive from the motor 50 to enable the pinion to be driven manually through the drive mechanism 30. This is a safety feature to enable the mechanism to function in the event of the motor 50 attempting to drive the steering column too fast/or in the wrong direction or in the case where the motor and/or gear box have have seized.The torque sensor 20 is preferably an assembly including a short sensor shaft on which is mounted a strain gauge capable of accurately measuring strain in the sensor shaft brought about by the application of torque within a predetermined range.Preferably the predetermined range of torque which is measured is 0-lONm;more preferably is about l-5Nm.Preferably the range of measured torque corresponds to about 0-1000 microstrain and the construction of the sensor shaft is chosen such that a torque of 5Nm will result in a twist of less than 2°in the shaft, more preferably less than 1°.Preferably the strain gauge is a SAW resonator,a suitable SAW resonator being described in WO91/13832. Preferably a configuration similar to that shown in Figure 3 of WO91/13832 is utilised wherein two SAW resonators are arranged at 45° to the shaft axis and at 90° to one another.Preferably the resonators operate with a resonance frequency of between 200-400 MHz and are arranged to produce a signal to the controller 40 of 1 MHz ±500 KHz d epending upon the direction of rotation of the sensor shaft. Thus, when the sensor shaft is not being twisted due to the absence of torque, it produces a 1 MHz signal.When the sensor shaft is twisted in one direction it produces a signal between 1.0 to 1.5 MHz. When the sensor shaft is twisted in the opposite direction it produces a signal between 1.0 to 0.5 MHz. Thus the same sensor is able to produce a signal indicative of the degree of torque and also the direction of rotation of the sensor shaft.Preferably the amount of torque generated by the motor inresponse to a measured torque of between 0-10Nm is 0-40Nm and for a measured torque of between l-5Nm is 0-25Nm.Preferably a feed back circuit is provided whereby the electric current being used by the motor is measured and compared by the controller 40 to ensure that the motor is running in the correct direction and providing the desired amount of power assistance. Preferably the controller acts to reduce the measured torque to zero and so controls the motor to increase its torque output to reduce the measured torque.A vehicle speed sensor (not shown) is preferably provided which sends a signal indicative of vehicle speed to the controller. The controller uses this signal to modify the degree of power assistance provided in response to the measured torque.Thus at low vehicle speeds maximum power assistance will be provided and a high vehicle speeds minimum power assistance will be provided.The controller is preferably a logic sequencer having a field programmable gate array for example a XC 4005 as supplied by Xilinx. Such a controller does not rely upon software and so is able to function more reliably in a car vehicle environment. It is envisaged that a logic sequence not having a field programmable array may be used.Electronic power steering system (English as EPS), and hydraulic power steering system (HPS) compared to, EPS has many advantages.The advantage is that the EPS:1) high efficiency. HPS efficiency is very low, generally 60% to 70%, while EPS and electrical connections, high efficiency, and some can be as high as 90 percent.2) less energy consumption. Automobile traffic in the actual process, at the time to about 5 percent of the time travelling, the HPS system, engine running, the pumps will always be in working condition, the oil pipeline has been in circulation, so that vehiclefuel consumption rate by 4 % To 6%, while EPS only when needed for energy, vehicle fuel consumption rates only increased by 0.5 percent.3) "Road sense of" good. Because EPS internal use of rigid, system of the lag can be controlled by software, and can be used in accordance with the operation of the driver to adjust.4) back to being good. EPS simple structure of small internal resistance, is a good back, get back to being the best characteristics, improve vehicle handling and stability.5) little environmental pollution. HPS hydraulic circuit in the hydraulic hoses and connectors, the existence of oil leaking, but hydraulic hoses can not be recovered, the environmental pollution are to a certain extent, while EPS almost no pollution to the environment.6) can be independent of the engines work. EPS for battery powered devices, as long as sufficient battery power, no matter what the condition for the engine, can produce power role.7) should have a wide range.8) easy to assemble and good layout.Now, power steering systems of some cars have become the standard-setting, the whole world about half of the cars used to power steering. With the development of automotive electronics technology, some cars have been using electric power steering gear, the car of the economy, power and mobility has improved. Electric power steering device on the car is a new power steering system device, developed rapidly in recent years both at home and abroad, because of its use of programmable electronic control devices, the flexibility in the same time there are also potential safety problems. In the analysis this unique product on the basis of the author of the characteristics of electronic control devices, security clearance just that the factors that deal with security measures, and discusseda number of concerns the safety of specific issues. The results showthat: Existing standards can not meet the electric power steering device security needs and made the electric power steering device safety evaluation of the idea.Research work on the electric power steering device development and evaluation of reference value.2 中文翻译2.1 电子动力转向系统图1电子动力转向系统的工作原理:电子动力转向系统是通过一个电动机来驱动动力方向盘液压泵或直接驱动转向联动装置。
汽车转向结构中英文翻译
History of the development of the Steering SystemSteering system is necessary in vehicle system is the basic system, driver through the steering wheel to manipulate and control car's direction of travel, so as to realize the intention of his driving.For more than 100 years, automobile industry with mechanical and electronic technology development and progress. Today, the car is not purely mechanical sense of a car, it is the mechanical, electronic, materials and other comprehensive product. Steering system with the development of the car industry after the long evolution.The traditional steering system is mechanical steering system, automotive steering wheel, by pilot control through such a series of mechanical parts steering wheel to realize the deflection, so as to realize the steering.As in the 1950s, hydraulic power steering system in automotive applications, marked the beginning of steering system. Sources of power steering by previous human to human and hydraulic booster.Hydraulic booster HPS (Hydraulic Power Steering) is in the Steering system based on the mechanical and Hydraulic system increased a. The hydraulic system and the engine, when the general part of the engine starts, provide automobile engine power forward, another part of the kinetic energy of hydraulic system for power. Due to its reliable work, mature technology still has been widely used. The steering system of the main characteristic is the fluid pressure, reduce drivers support in the steering wheel, improved the steering light and auto operation stability.But at the same time, there are also some hydraulic power system flaw:Aiming at vehicle design and manufacture, after the completion of the vehicle steering dynamical characteristics cannot change. The direct consequence is that when the dynamical characteristics in low power, car in low segment can get very good, but in high-speed period has good way to sense, because cannot adjust dynamical characteristics, no better way drivers, When the dynamical characteristics in high power, not very good at low segment tprompt effect, If not, aiming to vehicle hydraulic system must also be in the engine driving. As a result, the energy consumption, increase fuel engine,Existing hydraulic oil leakage problems should not only to environmental pollution, and easy to other components,Aiming at low temperatures, hydraulic system performance is poor.In recent years, with the electronic technology in the wide application, steering system also more and more used electronic devices. Turn into the electronic control system, therefore, thecorresponding appeared electrohydraulic power steering system. Electrohydraulic Power Steering can be divided into two categories: electric Hydraulic Steering system (Electro Hydraulic Power - the EHPS) and electric Hydraulic Steering Electronically Controlled ECHPS Steering (Hydraulic Power Steering). Electric hydraulic steering system is in hydraulic power system on the basis of the development of hydraulic booster systems, and different is, electric hydraulic power system of power sources in the hydraulic system, but not by motor engine motor drive hydraulic system, save energy and reduce the engine fuel consumption. Electric hydraulic steering is in traditional hydraulic booster systems on the basis of the development, the difference is that the electric hydraulic steering system, electronic control devices increased. The electronic control unit can according to the steering rate, speed auto operation parameters of hydraulic system, change the size of the hydraulic booster at different speeds, so as to realize the change, dynamical characteristics. But under the motor drive hydraulic system, in turn, motor can stop turning, thereby reducing energy consumption.Although electrohydraulic power steering system of hydraulic steering overcomes the drawbacks. But due to the existence of hydraulic system, it exists the hydraulic oil leakage problem, and electrohydraulic power steering system, introduced motor drive system is more complex, costs and reliability.In order to avoid Electric hydraulic Steering system, Electric Power Steering system of Electric Power Steering (EPS) should now. It with all sorts of steering system, the biggest difference lies in the electric power steering system has no hydraulic system. Originally produced by hydraulic steering system by motor. Electric power steering system of general by the torque sensor and microprocessor, motor, etc. The basic principle is: when the driver turned the steering wheel drive shaft rotation, to install in the rotation axes of the torque sensor and torque signal into electrical signals to microprocessors, microprocessor based on speed and torque signal other vehicles running parameters, according to the set procedures in the treatment of that power motors booster direction and the size of the booster. Since 1988, the first in Japan suzuki Cervo car to equip the steering system, power steering system is widely recognized by the people.Steering system is mainly embodied in the following aspects:A power steering system can provide different at different speeds under the dynamical characteristics. In the low road, steering, to increase more light, At high speed reduced steering, even in order to improve the road are increased to damp.A power steering system only in steering motors to work, to provide power, so as to reduce energy consumption.A motor, so by battery-powered electric power steering system can not work in engine under the condition of the work.Electric power steering system should not hydraulic system, compared with hydraulic booster systems and automated assembly. And electric power steering system can change the booster program microprocessor algorithm, easy dynamical characteristics of the change.The development of science and technology is changing, the traditional steering system of steering control (wheel steering), and turn of transmission mechanism. But the thought of the spark can always bring surprise! Electronic Steering system SBW Steering (to the Wire) was changed to the traditional concept of three most with micro-controller, it was replaced By the Steering transmission mechanism, the three most into two parts. Electronic steering system is the most advanced and automotive steering system of technology. It mainly consists of steering control module, to execute module and micro controller three modules.Steering control module's main function is to torque sensor detection by the driver intention, and to detect signal (including rotation direction and rotational speed, etc) by bus to micro controller, and micro controller based on the signal, and speed feedback control module is a steering wheel to make drivers, can feel road. But this is the way, is the development of virtual according to test data of integrated, formed "experience", and by way of curing process in the form of micro controller. So it is with speed, turning to the size of the torque rate and some corresponding relation.Steering Angle sensor and actuator including steering motors, steering motor controller etc. It is the function of micro controller based on the control command, drive motor rotation Angle to execute, complete to action. Also the size of the rotation Angle sensor monitoring and feedback to micro controller, forming a complete accurate closed-loop control system, steering movement.Micro controller is the core of electronic steering system. It is receiving signal detection, processed send corresponding control signal.Due to the micro controller replaced steering transmission mechanism, thus mechanical connection between components of the system, reduce the response speed and the accuracy of the response. And to turn strategy, transmission control software programming any Settings, And other equipment, such as ABS, automatic navigation equipment. Transmission mechanism of reducing brings a bigger car interior space, give rides more fun. And turning behavior can be recorded, save in software that can help EEPROM after further perfecting the steering control strategy, even can provide evidence for the traffic accident.Auto safety question has been the focus of public attention. Steering system and lightingsystem can give at night traffic better security. Page shown above, the traditional lighting system is the vehicle to the front line irradiation, vehicles and pedestrians in corners if drivers will be hard to find in the corner, pedestrians traffic accidents. If the lighting system combined with the steering system, pictured above, when drivers in the steering wheel to the right of the steering wheel Angle, light with the right to change, the more wide illumination turn, lighting, so in a broader range of pedestrian road corner will easily be found. Currently the lighting technology has in the midrange Citroen triumph, Toyota camrys are used.At present, electronic steering system reliability and the cost is obstructed the development. If the micro controller is mainly manifested in the problem, steering system will complete failure, its not like electric power steering system and electric hydraulic steering system, in the motor or hydraulic system, also can appear when problems with human to control cars. The micro-controller electronic steering system malfunction, because no mechanical systems can be connected to the steering wheel and steering, therefore impossible to control of the car. But despite the electronic steering system is still the future development direction of steering system.汽车转向系的发展历史转向系统是在车辆系统是必要的基本制度,通过方向盘司机操纵和控制汽车的方向旅行,以实现他的驾驶意图。
汽车转向系统外文原文及翻译

本文摘于《Race Car Vehicle Dynamics》作者:William F. Miliken and Douglas L. MilikenSteering systemsIntroductionThis chapter begins with a discussion of steering geometry—casterangle ,trail ,kingpin inclination ,and scrub radius .The next section discuss Ackermann geometry followed by steering racks and gears .Ride steer (bump steer ) and roll steer are closely related to each other ;without compliance they would be thesame .Finally ,wheel alignment is discussed .this chapter is tied to chapter 17 on suspension geometry –when designing a new chassis ,steering and suspension geometry considerations are high priorities .19.1 steering geometryThe kingpin in a solid front axle is the steering pivot .In modern independent suspensions , introduced by Maurice olley at Cadillac in 1932,the kingpin is replaced by two (or more ) ball joints that define the steering axis .This axis is not vertical or centered on the tire contact patch for a number of reason .see figure 19.1 to clarify how kingpin location is measured .In front view ,the angle is called kingpin inclination and the offset of the steering axis from the center of the tire print measured along the ground is called scrub (or scrub radius ). The distance from the kingpin axis to the wheel center plane , measured horizontally at axle height ,is the spindle length .In side view the kingpin angle is called caster angle ; if the kingpin axis does not pass through the wheel center then side view kingpin offset is present ,as in most motorcycle front ends .The distance measured on the ground from the steering axis to the center of the tire print is the trail (called caster offset in ref .1 )Kingpin front view geometryAs mentioned in chapter 17, kingpin inclination ,spindle length ,and scrub are usually a compromise between packaging and performance requirements .Some factors to consider include :1.With a positive spindle length (virtually every car is positive as shown in figure 19.1) the car will be raised up as the wheels are steered away from center .The more the kingpin inclination is tilted from vertical the more the car will be raised when the front wheels are steered .This effect always raises the car , regardless of which direction the wheel is steered ,unless the kingpin inclination is truevertical .the effect is symmetric side to side only if there is no caster angle .See the following section on caster angle .For a given kingpin inclination ,a longer positive spindle length will increase the amount of lift with steer .2.The effect of kingpin inclination and spindle length in raising the front end ,by itself ,is to aid centering of the steering at low speed .At high speed any trail will probably swamp out the effect that raise ad fall have on centering .3. Kingpin inclination affects the steer –camber characteristic .when a wheel is steered ,it will lean out at the top ,toward positive camber ,if the kingpin is inclined in the normal direction (toward the center of the car at the upper end ). Positive camber results for both left– and right-hand steer .the amount of this effect is small ,but significant if the track includes tight turns.4. When a wheel is rolling over a bumpy road ,the rolling radius is constantly changing ,resulting in changes of wheel rotation speed . This gives rise to longitudinal forces at the wheel center .The reaction of these forces will introduce kickback into the steering in proportion to the spindle length .If the spindle length is zero then there will be no kick from this source .Design changes made in the last model of the GM “P ”car (fiero ) shortened the spindle length and this resulted in less wheel kickback on rough roads when compared to early model “P ”cars.5. The scrub radius shown in figure 19.1 is negative ,as used on front-wheel–drive cars (see below ) . driving or braking forces (at the ground ) introduce steer torques proportional to the scrub radius . If the driving or braking force is different on left and right wheels then there will be a net steering torque felt by the driver (assuming that the steering gear has good enough rev erse efficiency ).The only time that this is not true is with zero scrub (centerpoint steering ) because there is no moment arm for the drive (or brake ) force to generate torque about the kingpin .With very wide tires the tire forces often are not centered in the wheel center plane due to slight changes in camber ,road surface irregularities ,tire nonuniformity (conicity ),or other asymmetric effects .These asymmetries can cause steering kickback regardless of the front view geometry .Packaging requirements often conflict with centerpoint steering and many race cars operate more or less okay on smooth tracks with large amounts of scrub .6. For front drive ,a negative scrub radius has two strong stabilizingeffects :first ,fixed steering wheel –if one drive wheel loses traction ,the opposingwheel will toe –out an amount determined by the steer compliance in the system .This will tend to steer the car in a straight line ,even though the tractive force is not equal side-to –side and the unequal tractive force is applying a yaw moment to the vehicle .Second ,with good reverse efficiency the driver’s hands never truly fix the steering wheel . In this case the steering wheel may be turned by the effect of uneven longitudinal tractive forces ,increasing the stabilizing effect of the negative scrub radius .Under braking the same is true .Negative scrub radius tends to keep the car traveling straight even when the braking force is not equal on the left and right side front tiresome (due to differences in the roadway or the brakes).Caster angle and trailWith mechanical trail ,shown in figure 19.1,the tire print follows behind the steering axis in side view .Perhaps the simplest example is on an office chair caster–with any distance of travel ,the wheel aligns itself behind the point .More trail means that the tire side force has a large moment arm to act on the kingpin axis .This produces more self-centering effect and is the primary source of self-centering moment about the kingpin axis at speed .Some considerations for choosing the caster angle and trail are :1.More trail will give higher steering force .with all cars ,less trail will lower the steering force .In some cases ,manual steering can be used on heavy sedans (instead of power steering ) if the trail is reduced to almost zero .2.Caster angle ,like kingpin inclination ,cause the wheel to rise and fall with steer .unlike kingpin inclination ,the effect is opposite from side to side .With symmetric geometry (including equal positive caster on left and right wheels ) ,the effect of left steer is to roll the car to the right ,causing a diagonal weight shift .In this case ,more load will be carried on the LF –RR diagonal ,an oversteer effect in aleft-hand turn .The diagonal weight shift will be larger if stiffer springing is used because this is a geometric effect .The distance each wheel rises (or falls ) is constant but the weight jacking and chassis roll angle are functions of the front and rear roll stiffness. This diagonal load change can be measured with the car on scales and alignment ( weaver ) plates .Keep in mind that the front wheels are not steered very much in actual racing , except on the very tightest hairpin turns . For example , on a 100-ft .radius (a 40-50 mph turn ), a 10-ft. wheelbase neutral steer car needs only about 0.1rad .(5.7)of steer at the front wheels (with a 16:1steering ratio this is about 90degree at the steering wheel ).For cars that turn in one direction only , caster stagger (differences in left and right caster ) is used to cause the car to pull to one side due to the car seeking the lowest ride height . caster stagger will also affect the diagonal weight jacking effect mentioned above .If the caster is opposite (positive on one side and negative the same number of degrees on the other side ) then the front of the car will only rise and fall with steer ,no diagonal weight jacking will occur .3. Caster angle affects steer-camber but ,unlike kingpin inclination ,the effect is favorable . With positive caster angle the outside wheel will camber in a negative direction (top of the wheel toward the center of the car ) while the inside wheel cambers in a positive direction , again learning into the turn .In skid recovery , “opposite lock ” (steer out of the turn ) is used and in this case the steer–camber resulting from caster angle is in the “wrong ” direction for increased front tire grip . conveniently ,this condition results from very low lateral force at the rear so large amounts of front grip are not needed .4. As discussed in chapter 2, tires have pneumatic trail which effectively adds to (and at high slip Angles subtracts from ) the mechanical trail . This tire effect is nonlinear with lateral force and affects steering torque and driver feel .In particular , the fact that pneumatic trail approaches zero as the tire reaches the limit will result in lowering the self-centering torque and can be s signal to the driver that the tire is near breakaway .The pneumatic trail “breakaway signal” will be swamped out by mechanical trail if the mechanical trail is large compared to the pneumatic trail .5.Sometimes the trail is measured in a direction perpendicular to the steering axis (rather than horizontal as shown in figure 19.1) because this more accurately describes the lever (moment ) arm that connects the tire lateral forces to the kingpin . Tie rod locationNote that in figure 19.1 a shaded area is shown for the steering tie rod location . Camber compliance under lateral force is unavoidable and if the tie rod is located as noted ,the effect on the steering will be in the understeer ( steer out of the turn ) direction becomes much more complex than can be covered here .19.2 Ackerman steering geometryAs the front wheels of a vehicle are steered away from the straight-ahead position ,the design of the steering linkage will determine if the wheels stay parallel or if one wheel steers more than the other .This difference in steer Angles on the left and right wheels should not be confused with toe-in or toe-out which are adjustments and add to ( or subtract from ) Ackerman geometric effects .For low lateral acceleration usage (street cars) it is common to use Ackerman geometry . as seen on the left of figure 19.2, this geometry ensures that all the wheels roll freely with no slip Angles because the wheels are steered to track a common turn center . Note that at low speed all wheels are on a significantly different radius , the inside front wheel must steer more than the outer front wheel . A reasonable approximation to this geometry may be as shown in figure 19.3.According to ref .99, Rudolf Ackerman patented the double pivot steering system in 1817 and in 1878, Charles Jeantaud added the concept mentioned above to eliminate wheel scrubbing when cornering . Another reason for Ackermann geometry ,mentioned by Maurice olley , was to keep carriage wheels from upsetting smooth gravel driveways .High lateral accelerations change the picture considerably . Now the tires alloperate at significant slip Angles and the loads on the inside track are less than on the outside track . Looking back to the tire performance curves ,it is seen that less slip angle is required at lighter loads to reach the peak of the cornering force to a higher slip angle than required for maximum side force . Dragging the inside tire along at high slip Angles ( above for peak lateral force ) raise the tire temperature and slows the car down due to slip angle ( induced ) drag .For racing , it is common to use parallel steering or even reverse Ackermann as shown on the center and right side of figure 19.2.It is possible to calculate the correct amount of reverse Ackermann if the tire properties and loads are known . In most cases the resulting geometry is found to be too extreme because the car must also be driven (or pushed ) at low speeds , for example in the pits .Another point to remember is that most turns in racing have a fairly large radius and the Ackermann effect is very small . In fact , unless the steering system and suspension are very stiff ,compliance (deflection ) under cornering loads may steer the wheels more than any Ackermann (or reverse Ackermann ) built into the geometry .The simplest construction that generates Ackermannn geometry is shown in figure 19.3 fo r “rear steer ” . Here ,the rack (cross link or relay rod in steering box systems ) is located behind the front axle and lines staring at the kingpin axis , extended through the outer tie rod ends , intersect in the center of the rear axle . The angularity of the steering knuckle will cause the inner wheel to steer more than the outer (toe-out on turning ) and a good approximation of “perfect Ackermann ” will be achieved .The second way to design-in differences between inner and outer steer Angles is by moving the rack (or cross link ) forward or backward so that it is no longer on a line directly connecting the two outer tie rod ball joints .This is shown in figure 19.4. with “rear steer ” , as shown in the figure ,moving the rack forward will tend mo re toward parallel steer (and eventually reverse Ackermann ), and moving it toward the rear of the car will increase the toe-out on turning .A third way to generate toe with steering is simply to make the steering arms different lengths . A shorter steering arm (as measured from the kingpin axis to the outer tie rod end ) will be steered through a larger angle than one with a longer knuckle. Of course this effect is asymmetric and applies only to cars turning in one direction—oval track cars .RecommendationWith the conflicting requirements mentioned above , the authors feel that parallel steer or a bit of reverse Ackermann is a reasonable compromise . With parallel steer , the car will be somewhat difficult to push through the pits because the front wheels will be fighting each other . at racing speeds , on large-radius turns , the front wheels are steered very little , thus any ackermann effects will not have a large effect on the individual wheel slip angles , relative to a reference steer angle , measured at the centerline of the car .文献翻译摘自《Race Car Vehicle Dynamics》第19章转向系统序言:本章以转向几何参数的讨论为开始,包括主销后倾角,后倾拖距,主销内倾角,主销偏置量。
汽车转向结构中英文翻译
History of the development of the Steering SystemSteering system is necessary in vehicle system is the basic system, driver through the steering wheel to manipulate and control car's direction of travel, so as to realize the intention of his driving.For more than 100 years, automobile industry with mechanical and electronic technology development and progress. Today, the car is not purely mechanical sense of a car, it is the mechanical, electronic, materials and other comprehensive product. Steering system with the development of the car industry after the long evolution.The traditional steering system is mechanical steering system, automotive steering wheel, by pilot control through such a series of mechanical parts steering wheel to realize the deflection, so as to realize the steering.As in the 1950s, hydraulic power steering system in automotive applications, marked the beginning of steering system. Sources of power steering by previous human to human and hydraulic booster.Hydraulic booster HPS (Hydraulic Power Steering) is in the Steering system based on the mechanical and Hydraulic system increased a. The hydraulic system and the engine, when the general part of the engine starts, provide automobile engine power forward, another part of the kinetic energy of hydraulic system for power. Due to its reliable work, mature technology still has been widely used. The steering system of the main characteristic is the fluid pressure, reduce drivers support in the steering wheel, improved the steering light and auto operation stability.But at the same time, there are also some hydraulic power system flaw:Aiming at vehicle design and manufacture, after the completion of the vehicle steering dynamical characteristics cannot change. The direct consequence is that when the dynamical characteristics in low power, car in low segment can get very good, but in high-speed period has good way to sense, because cannot adjust dynamical characteristics, no better way drivers, When the dynamical characteristics in high power, not very good at low segment tprompt effect, If not, aiming to vehicle hydraulic system must also be in the engine driving. As a result, the energy consumption, increase fuel engine,Existing hydraulic oil leakage problems should not only to environmental pollution, and easy to other components,Aiming at low temperatures, hydraulic system performance is poor.In recent years, with the electronic technology in the wide application, steering system also more and more used electronic devices. Turn into the electronic control system, therefore, thecorresponding appeared electrohydraulic power steering system. Electrohydraulic Power Steering can be divided into two categories: electric Hydraulic Steering system (Electro Hydraulic Power - the EHPS) and electric Hydraulic Steering Electronically Controlled ECHPS Steering (Hydraulic Power Steering). Electric hydraulic steering system is in hydraulic power system on the basis of the development of hydraulic booster systems, and different is, electric hydraulic power system of power sources in the hydraulic system, but not by motor engine motor drive hydraulic system, save energy and reduce the engine fuel consumption. Electric hydraulic steering is in traditional hydraulic booster systems on the basis of the development, the difference is that the electric hydraulic steering system, electronic control devices increased. The electronic control unit can according to the steering rate, speed auto operation parameters of hydraulic system, change the size of the hydraulic booster at different speeds, so as to realize the change, dynamical characteristics. But under the motor drive hydraulic system, in turn, motor can stop turning, thereby reducing energy consumption.Although electrohydraulic power steering system of hydraulic steering overcomes the drawbacks. But due to the existence of hydraulic system, it exists the hydraulic oil leakage problem, and electrohydraulic power steering system, introduced motor drive system is more complex, costs and reliability.In order to avoid Electric hydraulic Steering system, Electric Power Steering system of Electric Power Steering (EPS) should now. It with all sorts of steering system, the biggest difference lies in the electric power steering system has no hydraulic system. Originally produced by hydraulic steering system by motor. Electric power steering system of general by the torque sensor and microprocessor, motor, etc. The basic principle is: when the driver turned the steering wheel drive shaft rotation, to install in the rotation axes of the torque sensor and torque signal into electrical signals to microprocessors, microprocessor based on speed and torque signal other vehicles running parameters, according to the set procedures in the treatment of that power motors booster direction and the size of the booster. Since 1988, the first in Japan suzuki Cervo car to equip the steering system, power steering system is widely recognized by the people.Steering system is mainly embodied in the following aspects:A power steering system can provide different at different speeds under the dynamical characteristics. In the low road, steering, to increase more light, At high speed reduced steering, even in order to improve the road are increased to damp.A power steering system only in steering motors to work, to provide power, so as to reduce energy consumption.A motor, so by battery-powered electric power steering system can not work in engine under the condition of the work.Electric power steering system should not hydraulic system, compared with hydraulic booster systems and automated assembly. And electric power steering system can change the booster program microprocessor algorithm, easy dynamical characteristics of the change.The development of science and technology is changing, the traditional steering system of steering control (wheel steering), and turn of transmission mechanism. But the thought of the spark can always bring surprise! Electronic Steering system SBW Steering (to the Wire) was changed to the traditional concept of three most with micro-controller, it was replaced By the Steering transmission mechanism, the three most into two parts. Electronic steering system is the most advanced and automotive steering system of technology. It mainly consists of steering control module, to execute module and micro controller three modules.Steering control module's main function is to torque sensor detection by the driver intention, and to detect signal (including rotation direction and rotational speed, etc) by bus to micro controller, and micro controller based on the signal, and speed feedback control module is a steering wheel to make drivers, can feel road. But this is the way, is the development of virtual according to test data of integrated, formed "experience", and by way of curing process in the form of micro controller. So it is with speed, turning to the size of the torque rate and some corresponding relation.Steering Angle sensor and actuator including steering motors, steering motor controller etc. It is the function of micro controller based on the control command, drive motor rotation Angle to execute, complete to action. Also the size of the rotation Angle sensor monitoring and feedback to micro controller, forming a complete accurate closed-loop control system, steering movement.Micro controller is the core of electronic steering system. It is receiving signal detection, processed send corresponding control signal.Due to the micro controller replaced steering transmission mechanism, thus mechanical connection between components of the system, reduce the response speed and the accuracy of the response. And to turn strategy, transmission control software programming any Settings, And other equipment, such as ABS, automatic navigation equipment. Transmission mechanism of reducing brings a bigger car interior space, give rides more fun. And turning behavior can be recorded, save in software that can help EEPROM after further perfecting the steering control strategy, even can provide evidence for the traffic accident.Auto safety question has been the focus of public attention. Steering system and lightingsystem can give at night traffic better security. Page shown above, the traditional lighting system is the vehicle to the front line irradiation, vehicles and pedestrians in corners if drivers will be hard to find in the corner, pedestrians traffic accidents. If the lighting system combined with the steering system, pictured above, when drivers in the steering wheel to the right of the steering wheel Angle, light with the right to change, the more wide illumination turn, lighting, so in a broader range of pedestrian road corner will easily be found. Currently the lighting technology has in the midrange Citroen triumph, Toyota camrys are used.At present, electronic steering system reliability and the cost is obstructed the development. If the micro controller is mainly manifested in the problem, steering system will complete failure, its not like electric power steering system and electric hydraulic steering system, in the motor or hydraulic system, also can appear when problems with human to control cars. The micro-controller electronic steering system malfunction, because no mechanical systems can be connected to the steering wheel and steering, therefore impossible to control of the car. But despite the electronic steering system is still the future development direction of steering system.汽车转向系的发展历史转向系统是在车辆系统是必要的基本制度,通过方向盘司机操纵和控制汽车的方向旅行,以实现他的驾驶意图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Electronic power steering systemWhat it is:Electrically powered steering uses an electric motor to drive either the power steering hydraulic pump or the steering linkage directly. The power steering function is therefore independent of engine speed, resulting in significant energy savings.How it works :Conventional power steering systems use an engine accessory belt to drive the pump, providing pressurized fluid that operates a piston in the power steering gear or actuator to assist the driver.In electro-hydraulic steering, one electrically powered steering concept uses a high efficiency pump driven by an electric motor. Pump speed is regulated by an electric controller to vary pump pressure and flow, providing steering efforts tailored for different driving situations. The pump can be run at low speed or shut off to provideenergy savings during straight ahead driving (which is most of the time in most world markets).Direct electric steering uses an electric motor attached to the steering rack via a gear mechanism (no pump or fluid). A variety of motor types and gear drives is possible. A microprocessor controls steering dynamics and driver effort. Inputs include vehicle speed and steering, wheel torque, angular position and turning rate.Working In Detail:A "steering sensor" is located on the input shaft where it enters the gearbox housing. The steering sensor is actually two sensors in one: a "torque sensor" that converts steering torque input and its direction into voltage signals, and a "rotation sensor" that converts the rotation speed and direction into voltage signals. An "interface" circuit that shares the same housing converts the signals from the torque sensor and rotation sensor into signals the control electronics can process.Inputs from the steering sensor are digested by a microprocessor control unit that also monitors input from the vehicle's speed sensor. The sensor inputs are then compared to determine how much power assist is required according to a preprogrammed "force map" in the control unit's memory. The control unit then sends out the appropriate command to the "power unit" which then supplies the electric motor with current. The motor pushes the rack to the right or left depending on which way the voltage flows (reversing the current reverses the direction the motor spins). Increasing the current to the motor increases the amount of power assist.The system has three operating modes: a "normal" control mode in which left or right power assist is provided in response to inputfrom the steering torque and rotation sensor's inputs; a "return" control mode which is used to assist steering return after completing a turn; and a "damper" control mode that changes with vehicle speed to improve road feel and dampen kickback.If the steering wheel is turned and held in the full-lock position and steering assist reaches a maximum, the control unit reduces current to the electric motor to prevent an overload situation that might damage the motor. The control unit is also designed to protect the motor against voltage surges from a faulty alternator or charging problem.The electronic steering control unit is capable of self-diagnosing faults by monitoring the system's inputs and outputs, and the driving current of the electric motor. If a problem occurs, the control unit turns the system off by actuating a fail-safe relay in the power unit. This eliminates all power assist, causing the system to revert back to manual steering. A dash EPS warning light is also illuminated to alert the driver. To diagnose the problem, a technician jumps the terminals on the service check connector and reads out the trouble codes.click here to see a biggerElectric power steering systems promise weight reduction, fuel savings and package flexibility, at no cost penalty.Europe's high fuel prices and smaller vehicles make a fertile testbed for electric steering, a technology that promises automakers weight savings and fuel economy gains. And in a short time, electric steering will make it to the U.S., too. "It's just just a matter of time," says Aly Badawy, director of research and development for Delphi Saginaw Steering Systems in Saginaw, Mich. "The issue was cost and that's behind us now. By 2002 here in the U.S. the cost of electric power steering will absolutely be a wash over hydraulic."Today, electric and hybrid-powered vehicles (EV), including Toyota's Prius and GM's EV-1, are the perfect domain for electric steering. But by 2010, a TRW Inc. internal study estimates that one out of every three cars produced in the world will be equipped with some form of electrically-assisted steering. The Cleveland-basedsupplier claims its new steering systems could improve fuel economy by up to 2 mpg, while enhancing handling. There are true bottom-line benefits as well for automakers by reducing overall costs and decreasing assembly time, since there's no need for pumps, hoses and fluids.Another claimed advantage is shortened development time. For instance, a Delphi group developed E-TUNE, a ride-and-handling software package that can be run off a laptop computer. "They can take that computer and plug it in, attach it to the controller and change all the handling parameters -- effort level, returnability, damping -- on the fly," Badawy says. "It used to take months." Delphi has one OEM customer that should start low-volume production in '99./adlog/c/r=12640&s=790604&o=13886:14023:13888:153 99:&h=cn&p=&b=14&l=&site=23&pt=&nd=&pid=&cid=&pp=100&e=&rqid=01c17-ad-e8480771F615DF093&orh=LINE&oepartner=&epartner=&ppartner=&pdom=&cpnm odule=&count=&ra=10.15.56.33&t=2008.04.19.09.09.02/http://c m/ck/9998-57911-18316-1?mpt=2008.04.19.09.09.02Electric steering units are normally placed in one of three positions: column-drive, pinion-drive and rack-drive. Which system will become the norm is still unclear. Short term, OEMs will choose the steering system that is easiest to integrate into an existing platform. Obviously, greater potential comes from designing the system into an all-new platform."We have all three designs under consideration," says Dr. Herman Strecker, group vice president of steering systems division at ZF in Schwaebisch Gmuend, Germany. "It's up to the market and OEMswhich version finally will be used and manufactured.""The large manufacturers have all grabbed hold of what they consider a core technology," explains James Handysides, TRW vice president, electrically assisted steering in Sterling Heights, Mich. His company offers a portfolio of electric steering systems (hybrid electric, rack-, pinion-, and column-drive). TRW originally concentrated on what it still believes is the purest engineering solution for electric steering--the rack-drive system. The system is sometimes refered to as direct drive or ball/nut drive.Still, this winter TRW hedged its bet, forming a joint venture with LucasVarity. The British supplier received $50 million in exchange for its electric column-drive steering technology and as sets. Initial production of the column and pinion drive electric steering systems is expected to begin in Birmingham, England, in 2000."What we lack is the credibility in the steering market," says Brendan Conner, managing director, TRW/LucasVarity Electric Steering Ltd. "The combination with TRW provides us with a good opportunity for us to bridge that gap." LucasVarity currently has experimental systems on 11 different vehicle types, mostly European. TRW is currently supplying its EAS systems for Ford and Chrysler EVs in North America and for GM's new Opel Astra.In 1995, according to Delphi, traditional hydraulic power steering systems were on 7596 of all vehicles sold globally. That 37-million vehicle pool consumes about 10 million gallons in hydraulic fluid that could be superfluous, if electric steering really takes off.The present invention relates to an electrically powered drive mechamsm for providing powered assistance to a vehicle steering mechanism. According to one aspect of the present invention, there is provided an electrically powered driven mechanism for providing powered assistance to a vehicle steering mechanism having a manually rotatable member for operating the steering mechanism, the drive mechanism including a torque sensor operable to sense torque being manually applied to the rotatable member, an electrically powered drive motor drivingly connected to the rotatable member and a controller which is arranged to control the speed and direction of rotation of the drive motor in response to signals received from the torque sensor, the torque sensor including a sensor shaft adapted for connection to the rotatable member to form an extension thereof so that torque is transmitted through said sensor shaft when the rotatable member is manually rotated and a strain gauge mounted on the sensor shaft for producing a signal indicative of the amount of torque being transmitted through said shaft.Preferably the sensor shaft is non-rotatably mounted at one axial end in a first coupling member and is non-rotatably mounted at its opposite axial end in a second coupling member, the first and second coupling members being inter-engaged to permit limited rotation there between so that torque under a predetermined limit is transmitted by the sensor shaft only and so that torque above said predetermined limit is transmitted through the first and second coupling members.The first and second coupling members are preferably arranged to act as a bridge for drivingly connecting first and second portions of the rotating member to one another.Preferably the sensor shaft is of generally rectangular cross-section throughout the majority of its length.Preferably the strain gauge includes one or more SAW resonators secured to the sensor shaft.Preferably the motor isdrivingly connected to the rotatable member via a clutch.Preferably the motor includes a gear box and is concentrically arranged relative to the rotatable member.Various aspects of the present invention will hereafter be described, with reference to the accompanying drawings, in which :Figure 1 is a diagrammatic view of a vehicle steering mechanism including an electrically powered drive mechanism according to the present invention,Figure 2 is a flow diagram illustrating interaction between various components of the drive mechanism shown in Figure 1 ,Figure 3 is an axial section through the drive mechanism shown in Figure 1, Figure 4 is a sectional view taken along lines IV-IV in Figure 3,Figure 5 is a more detailed exploded view of the input drives coupling shown in Figure 3, and Figure 6 is a more detailed exploded view of the clutch showing in Figure 3. Referring initially to Figure 1, there is shown a vehicle steering mechanism 10 drivingly connected to a pair of steerable road wheels.The steering mechanism 10 shown includes a rack and pinion assembly 14 connected to the road wheels 12 via joints 15. The pinion(not shown) of assembly 14 is rotatably driven by a manually rotatable member in the form of a steering column 18 which is manually rotated by a steering wheel 19.The steering column 18 includes an electric powered drive mechanism 30 which includes an electric drive motor (not shown in Figure 1) for driving the pinion in response to torque loadings in the steering column 18 in order to provide power assistance for the operative when rotating the steering wheel 19.As schematically illustrated in Figure 2, the electric powered drive mechanism includes a torque sensor20 which measures the torque applied by the steering column 18 when driving the pinion and supplies a signal to a controller 40.The controller 40 is connected to a drive motor 50 and controls the electric current supplied to the motor 50 to control the amount of torque generated by the motor 50and the direction of its rotation.The motor 50 is drivingly connected to the steering column 18 preferably via a gear box 60, preferably an epicyclic gear box, and a clutch 70. The clutch 70 is preferably permanently engaged during normal operation and is operative under certain conditions to isolate drive from the motor 50 to enable the pinion to be driven manually through the drive mechanism 30. This is a safety feature to enable the mechanism to function in the event of the motor 50 attempting to drive the steering column too fast/or in the wrong direction or in the case where the motor and/or gear box have have seized.The torque sensor 20 is preferably an assembly including a short sensor shaft on which is mounted a strain gauge capable of accurately measuring strain in the sensor shaft brought about by the application of torque within a predetermined range.Preferably the predetermined range of torque which is measured is 0-lONm;more preferably is about l-5Nm.Preferably the range of measured torque corresponds to about 0-1000 microstrain and the construction of the sensor shaft is chosen such that a torque of 5Nm will result in a twist of less than 2°in the shaft, more preferably less than 1°.Preferably the strain gauge is a SAW resonator,a suitable SAW resonator being described in WO91/13832. Preferably a configuration similar to that shown in Figure 3 of WO91/13832 is utilised wherein two SAW resonators are arranged at 45°to the shaft axis and at 90°to one another.Preferably the resonators operate with a resonance frequency of between 200-400 MHz and are arranged to produce a signal to the controller 40 of 1 MHz ±500 KHz depending upon the direction of rotation of the sensor shaft. Thus, when the sensor shaft is not being twisted due to the absence of torque, it produces a 1 MHz signal.When the sensor shaft is twisted in one direction it produces a signal between 1.0 to 1.5 MHz. When the sensor shaft is twisted inthe opposite direction it produces a signal between 1.0 to 0.5 MHz. Thus the same sensor is able to produce a signal indicative of the degree of torque and also the direction of rotation of the sensor shaft.Preferably the amount of torque generated by the motor in response to a measured torque of between 0-10Nm is 0-40Nm and for a measured torque of between l-5Nm is 0-25Nm.Preferably a feed back circuit is provided whereby the electric current being used by the motor is measured and compared by the controller 40 to ensure that the motor is running in the correct direction and providing the desired amount of power assistance. Preferably the controller acts to reduce the measured torque to zero and so controls the motor to increase its torque output to reduce the measured torque.A vehicle speed sensor (not shown) is preferably provided which sends a signal indicative of vehicle speed to the controller. The controller uses this signal to modify the degree of power assistance provided in response to the measured torque.Thus at low vehicle speeds maximum power assistance will be provided and a high vehicle speeds minimum power assistance will be provided.The controller is preferably a logic sequencer having a field programmable gate array for example a XC 4005 as supplied by Xilinx. Such a controller does not rely upon software and so is able to function more reliably in a car vehicle environment. It is envisaged that a logic sequence not having a field programmable array may be used.Electronic power steering system (English as EPS), and hydraulic power steering system (HPS) compared to, EPS has many advantages.The advantage is that the EPS:1) high efficiency. HPS efficiency is very low, generally 60% to 70%, while EPS and electrical connections, high efficiency, and some can be as high as 90 percent.2) less energy consumption. Automobile traffic in the actual process, at the time to about 5 percent of the time travelling, the HPS system, engine running, the pumps will always be in working condition, the oil pipeline has been in circulation, so that vehicle fuel consumption rate by 4 % To 6%, while EPS only when needed for energy, vehicle fuel consumption rates only increased by 0.5 percent.3) "Road sense of" good. Because EPS internal use of rigid, system of the lag can be controlled by software, and can be used in accordance with the operation of the driver to adjust.4) back to being good. EPS simple structure of small internal resistance, is a good back, get back to being the best characteristics, improve vehicle handling and stability.5) little environmental pollution. HPS hydraulic circuit in the hydraulic hoses and connectors, the existence of oil leaking, but hydraulic hoses can not be recovered, the environmental pollution are to a certain extent, while EPS almost no pollution to the environment.6) can be independent of the engines work. EPS for battery powered devices, as long as sufficient battery power, no matter what the condition for the engine, can produce power role.7) should have a wide range.8) easy to assemble and good layout.Now, power steering systems of some cars have become the standard-setting, the whole world about half of the cars used to power steering. With the development of automotive electronics technology, some cars have been using electric power steering gear, the car of the economy, power and mobility has improved. Electric power steering device on the car is a new power steering system device, developed rapidly in recent years both at home and abroad, because of its use of programmable electronic control devices, the flexibility in the same time there are also potential safety problems.In the analysis this unique product on the basis of the author of the characteristics of electronic control devices, security clearance just that the factors that deal with security measures, and discussed a number of concerns the safety of specific issues. The results show that: Existing standards can not meet the electric power steering device security needs and made the electric power steering device safety evaluation of the idea.Research work on the electric power steering device development and evaluation of reference value.电子动力转向系统图1电子动力转向系统的工作原理:电子动力转向系统是通过一个电动机来驱动动力方向盘液压泵或直接驱动转向联动装置。