空间大地直角坐标系及其转换模型
大地坐标及直角空间坐标转换计算公式
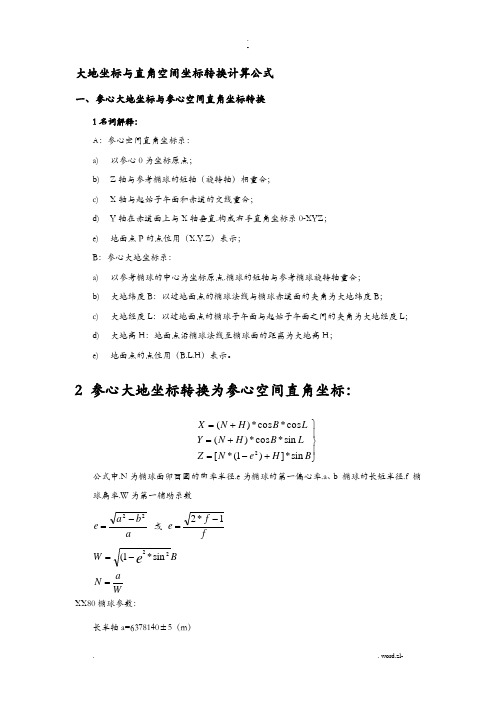
大地坐标与直角空间坐标转换计算公式一、参心大地坐标与参心空间直角坐标转换1名词解释:A :参心空间直角坐标系:a) 以参心0为坐标原点;b) Z 轴与参考椭球的短轴(旋转轴)相重合;c) X 轴与起始子午面和赤道的交线重合;d) Y 轴在赤道面上与X 轴垂直.构成右手直角坐标系0-XYZ ;e) 地面点P 的点位用(X.Y.Z )表示;B :参心大地坐标系:a) 以参考椭球的中心为坐标原点.椭球的短轴与参考椭球旋转轴重合;b) 大地纬度B :以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B ;c) 大地经度L :以过地面点的椭球子午面与起始子午面之间的夹角为大地经度L ;d) 大地高H :地面点沿椭球法线至椭球面的距离为大地高H ;e) 地面点的点位用(B.L.H )表示。
2 参心大地坐标转换为参心空间直角坐标:⎪⎭⎪⎬⎫+-=+=+=B H e N Z L B H N Y L B H N X sin *])1(*[sin *cos *)(cos *cos *)(2公式中.N 为椭球面卯酉圈的曲率半径.e 为椭球的第一偏心率.a 、b 椭球的长短半径.f 椭球扁率.W 为第一辅助系数ab a e 22-= 或 ff e 1*2-= Wa N B W e =-=22sin *1( XX80椭球参数:长半轴a=6378140±5(m )短半轴b=6356755.2882m扁 率α=1/298.2573 参心空间直角坐标转换参心大地坐标 []N BY X H H e N Y X H N Z B XY L -+=+-++==cos ))1(**)()(*arctan()arctan(22222 二 高斯投影及高斯直角坐标系1、高斯投影概述高斯-克吕格投影的条件:1. 是正形投影;2. 中央子午线不变形高斯投影的性质:1. 投影后角度不变;2. 长度比与点位有关.与方向无关;3. 离中央子午线越远变形越大为控制投影后的长度变形.采用分带投影的方法。
坐标转换中的大地坐标系与空间直角坐标系转换公式

坐标转换中的大地坐标系与空间直角坐标系转换公式在测量与地理信息领域,坐标转换是一个非常重要的概念。
它涉及将不同坐标系下的位置互相转换,使得地理空间信息能够得到准确而一致地表达。
而在坐标转换的过程中,大地坐标系与空间直角坐标系的相互转换公式则是至关重要的工具。
大地坐标系是一种常用的坐标系,在地理测量和导航等领域广泛应用。
它采用了经纬度和大地高作为坐标参数,可以精确地描述地球上任意一点的位置。
经度表示东西方向上的位置,纬度表示南北方向上的位置,而大地高则表示相对于海平面的高度。
在大地坐标系下,地球被近似看作一个椭球体,因此大地坐标系也被称为椭球坐标系。
然而,由于大地坐标系的曲线性质,它并不适合直接参与复杂三维计算,尤其是在工程测量中需要使用的情况。
因此,我们需要将大地坐标系转换为空间直角坐标系,以便进行进一步的计算和分析。
空间直角坐标系采用了直角坐标的表示方式,其坐标参数分别为X、Y、Z,可以方便地进行几何运算。
在进行坐标转换时,我们需要采用适当的公式来实现大地坐标系到空间直角坐标系的转换。
下面将介绍两种常用的转换公式。
1. 大地坐标系到空间直角坐标系的转换公式大地坐标系到空间直角坐标系的转换公式可以通过三个连续的旋转和平移变换来实现。
具体而言,我们首先将大地坐标系的原点O与空间直角坐标系原点重合,然后进行三次坐标轴的旋转,使得大地坐标系的纬度线与空间直角坐标系的Z轴重合。
接着,我们对大地坐标系进行一个小角度的旋转,使得大地纬线与空间直角坐标系的Y轴重合。
最后,再进行一个小角度的旋转,将大地经线与空间直角坐标系的X轴重合。
通过以上步骤,即可完成大地坐标系到空间直角坐标系的转换。
2. 空间直角坐标系到大地坐标系的转换公式与大地坐标系到空间直角坐标系的转换相反,空间直角坐标系到大地坐标系的转换需要进行三次逆变换。
即首先将空间直角坐标系的原点与大地坐标系原点重合,然后进行三次逆变换,回到大地坐标系。
为了实现空间直角坐标系到大地坐标系的转换,我们需要利用解析几何的知识。
空间大地坐标系与平面直角坐标系转换公式

空间大地坐标系与平面直角坐标系转换公式空间大地坐标系和平面直角坐标系是两种不同的坐标系统,用于描述地球上的点的位置。
在进行空间大地坐标系与平面直角坐标系之间的转换时,需要考虑到地球的椭球体形状和投影方式。
下面将详细介绍空间大地坐标系与平面直角坐标系的转换方法。
1.空间大地坐标系经度:经度是指地球上特定点与本初子午线之间的角度差,用度、分、秒的形式表示。
纬度:纬度是指地球上特定点距离赤道的角度,用度、分、秒的形式表示。
大地高:大地高是指地球表面特定点到参考椭球体上其中一参考面的高度差,可分为正高和负高。
2.平面直角坐标系平面直角坐标系是以地球上一些基准点为原点建立的二维坐标系。
在平面直角坐标系下,点的位置通常用东方向坐标值X和北方向坐标值Y来表示。
3.空间大地坐标系到平面直角坐标系的转换公式3.1平面直角投影平面直角投影是将地球表面上的点投影到一个水平的平面上。
其转换公式为:X = k₀ + R * cosL * sin(λ - λ₀)Y = k₀ + R * (cosφ₀ * sinL - sinφ₀ * cosL * cos(λ - λ₀))其中,X和Y为平面直角坐标系下的坐标值,L为参考点与待转换点的经度差,λ为待转换点的经度,φ₀为参考点的纬度,λ₀为参考点的经度,k₀为常数,R为参考点到地心的距离。
3.2高斯投影高斯投影是将地球上的点投影到一个平面上,使得该平面上的距离尽可能与大地距离一致。
其转换公式为:X = X₀ + N * cosB * (λ - L₀)Y = Y₀ + N * (tanB * cos(λ - L₀) - sinB * (B - B₀))其中,X和Y为平面直角坐标系下的坐标值,X₀和Y₀为参考点的平面坐标,N为法向子午线长度,B为待转换点的纬度,λ为待转换点的经度,L₀为参考点的经度,B₀为参考点的纬度。
4.平面直角坐标系到空间大地坐标系的转换公式平面直角坐标系到空间大地坐标系的转换公式为空间大地坐标系到平面直角坐标系的逆运算,可以通过解方程组或迭代法来进行计算。
空间大地坐标系及平面直角坐标系转换公式

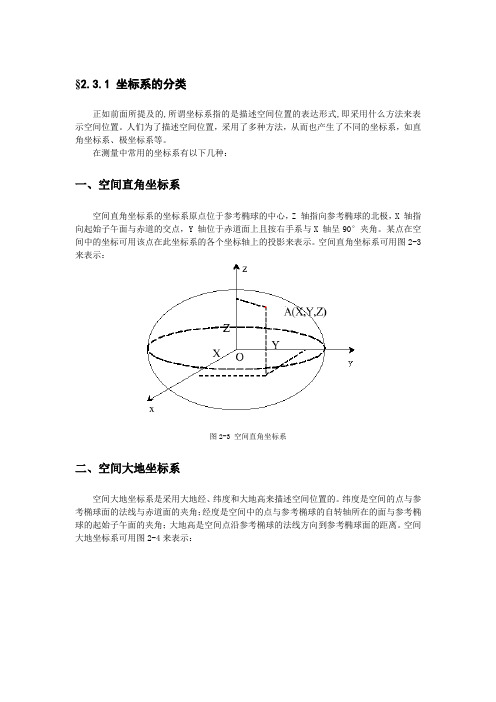
§2.3.1 坐标系的分类正如前面所提及的,所谓坐标系指的是描述空间位置的表达形式,即采用什么方法来表示空间位置。
人们为了描述空间位置,采用了多种方法,从而也产生了不同的坐标系,如直角坐标系、极坐标系等。
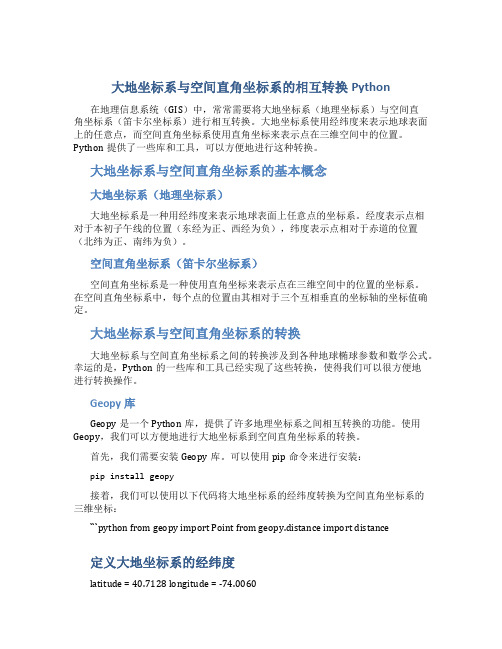
在测量中常用的坐标系有以下几种:一、空间直角坐标系空间直角坐标系的坐标系原点位于参考椭球的中心,Z 轴指向参考椭球的北极,X 轴指向起始子午面与赤道的交点,Y 轴位于赤道面上且按右手系与X 轴呈90°夹角。
某点在空间中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。
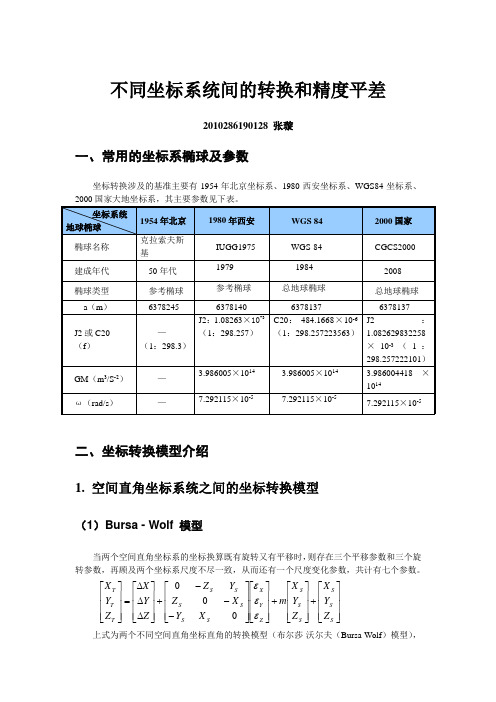
空间直角坐标系可用图2-3来表示:图2-3 空间直角坐标系二、空间大地坐标系空间大地坐标系是采用大地经、纬度和大地高来描述空间位置的。
纬度是空间的点与参考椭球面的法线与赤道面的夹角;经度是空间中的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地高是空间点沿参考椭球的法线方向到参考椭球面的距离。
空间大地坐标系可用图2-4来表示:图2-4空间大地坐标系三、平面直角坐标系平面直角坐标系是利用投影变换,将空间坐标空间直角坐标或空间大地坐标通过某种数学变换映射到平面上,这种变换又称为投影变换。
投影变换的方法有很多,如横轴墨卡托投影、UTM 投影、兰勃特投影等。
在我XX 用的是高斯-克吕格投影也称为高斯投影。
UTM 投影和高斯投影都是横轴墨卡托投影的特例,只是投影的个别参数不同而已。
高斯投影是一种横轴、椭圆柱面、等角投影。
从几何意义上讲,是一种横轴椭圆柱正切投影。
如图左侧所示,设想有一个椭圆柱面横套在椭球外面,并与某一子午线相切〔此子午线称为中央子午线或轴子午线〕,椭球轴的中心轴CC ’通过椭球中心而与地轴垂直。
高斯投影满足以下两个条件:1、 它是正形投影;2、 中央子午线投影后应为x 轴,且长度保持不变。
将中央子午线东西各一定经差〔一般为6度或3度〕X 围内的地区投影到椭圆柱面上,再将此柱面沿某一棱线展开,便构成了高斯平面直角坐标系,如以下图2-5右侧所示。
常用坐标系之间的关系与转换
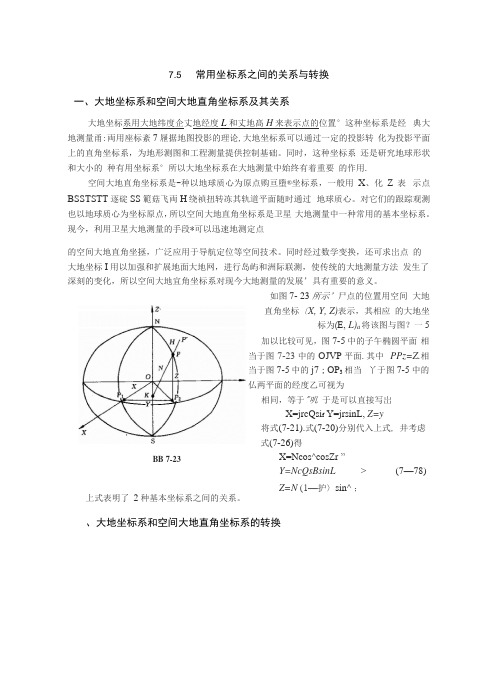
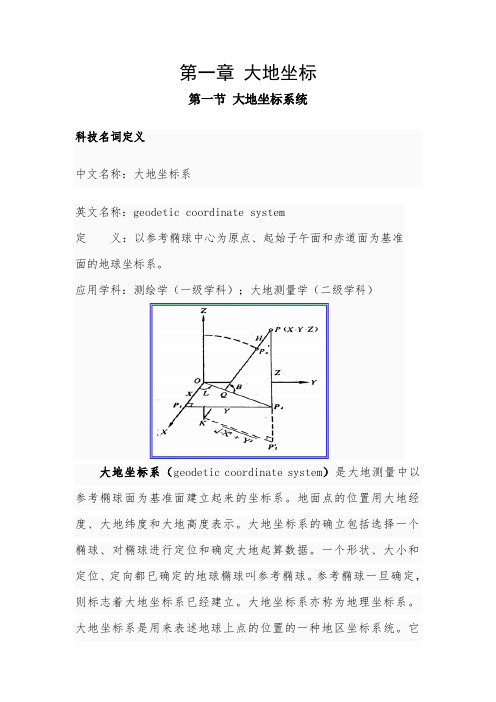
7.5 常用坐标系之间的关系与转换一、大地坐标系和空间大地直角坐标系及其关系大地坐标系用大地纬度企丈地经度L 和丈地髙H 来表示点的位置°这种坐标系是经 典大地测量甬:両用座标紊7屜据地图投影的理论,大地坐标系可以通过一定的投影转 化为投影平面上的直角坐标系,为地形测图和工程测量提供控制基础。
同时,这种坐标系 还是研究地球形状和大小的 种有用坐标系°所以大地坐标系在大地测量中始终有着重要 的作用.空间大地直角坐标系是-种以地球质心为原点购亘墮®坐标系,一般用X 、化Z 表 示点BSSTSTT 逐碇SS 範菇飞両H 绕禎扭转冻其轨道平面随时通过 地球质心。
对它们的跟踪观测也以地球质心为坐标原点,所以空间大地直角坐标系是卫星 大地测量中一种常用的基本坐标系。
现今,利用卫星大地测量的手段*可以迅速地测定点的空间大地直角坐拯,广泛应用于导航定位等空间技术。
同时经过数学变换,还可求岀点 的大地坐标I 用以加强和扩展地面大地网,进行岛屿和洲际联测,使传统的大地测量方法 发生了深刻的变化,所以空间大地宜角坐标系对现今大地测量的发展’具有重要的意义。
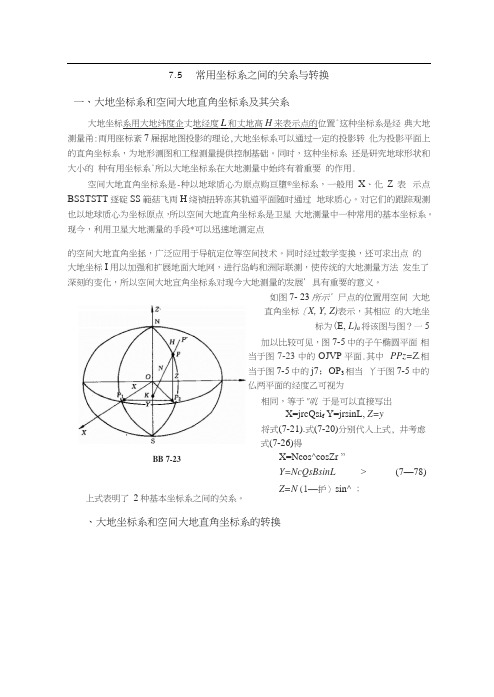
、大地坐标系和空间大地直角坐标系的转换如图7- 23所示’尸点的位置用空间 大地直角坐标〔X, Y, Z)表示,其相应 的大地坐标为(E, L)a 将该图与图?一5上式表明了 2种基本坐标系之间的关系。
加以比较可见,图7-5中的子午椭圆平面 相当于图7-23中的OJVP 平面.其中 PPz=Z.相当于图7-5中的j7;OP 3相当 丫于图7-5中的仏两平面的经度乙可视为相同,等于"叽 于是可以直接写岀X=jrcQsi f Y=jrsinL, Z=y将式(7-21).式(7-20)分别代入上式, 井考虑式(7-26)得X=Ncos^cosZr ”Y =NcQsBsinL > (7—78)Z=N (1—护〉sin^ ;BB 7-231.由大地坐标求空间大地直角坐标当已知椭球面上任一点P 的大地坐标(B, L)时,可以按式(7-78)直接求该点的 空间大地直角坐标(X, Y, Z)。
不同空间直角坐标系的转换

不同空间直角坐标系的转换
欧勒角
不同空间直角坐标系的转换,包括三个坐标轴的平移和坐标轴的旋转,以及两个坐标系的尺度比参数,坐标轴之间的三个旋转角叫欧勒角。
三参数法
三参数坐标转换公式是在假设两坐标系间各坐标轴相互平行,轴系间不存在欧勒角的条件下得出的。
实际应用中,因为欧勒角不大,可以用三参数公式近似地进行空间直角坐标系统的转换。
公共点只有一个时,采用三参数公式进行转换。
七参数法
用七参数进行空间直角坐标转换有布尔莎公式,莫洛琴斯基公式和范氏公式等。
下面给出布尔莎七参数公式:
坐标转换多项式回归模型
坐标转换七参数公式属于相似变换模型。
大地控制网中的系统误差一般呈区域性,当区域较小时,区域性的系统误差被相似变换参数拟合,故局部区域的坐标转换采用七参数公式模型是比较适宜的。
但对全国或一个省区范围内的坐标转换,可以采用多项式回归模型,将各区域的系统偏差拟合到回归参数中,从而提高坐标转换精度。
两种不同空间直角坐标系转换时,坐标转换的精度取决于坐标转换的数学模型和求解转换系数的公共点坐标精度,此外,还与公共点的分布有关。
鉴于地面控制网系统误差在⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000111222Z Y X Z Y X Z Y X ⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000111111222000)1(Z Y X Z Y X Z Y X m Z Y X X Y X Z Y Z εεεεεε
不同区域并非是一个常数,所以采用分区进行坐标转换能更好地反映实际情况,提高坐标转换的精度。
不同坐标系统间的转换和精度平差
不同坐标系统间的转换和精度平差2010286190128 张璇一、常用的坐标系椭球及参数坐标转换涉及的基准主要有1954年北京坐标系、1980西安坐标系、WGS84坐标系、二、坐标转换模型介绍1. 空间直角坐标系统之间的坐标转换模型(1)Bursa - Wolf 模型当两个空间直角坐标系的坐标换算既有旋转又有平移时,则存在三个平移参数和三个旋转参数,再顾及两个坐标系尺度不尽一致,从而还有一个尺度变化参数,共计有七个参数。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡∆∆∆=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡S S S S S S Z Y X SSS S S S T T T Z Y X Z Y X m X Y X Z Y Z Z Y X Z Y X εεε000上式为两个不同空间直角坐标直角的转换模型(布尔莎-沃尔夫(Bursa-Wolf )模型),也称默特(Helmert )模型,其转换参数分别是3个平移参数(Δx ,Δy ,Δz ),三个旋转参数(εx ,εy ,εz )和一个尺度参数m 。
为了求得这7个转换参数,至少需要3个公共点,当多于3个公共点时,可按最小二乘法求得7个参数的最或是值。
(2)Molodensky 模型如果旋转与尺度是相对于参考点P K ,即以参考点P K 作变换中心。
则有Molodensky 模型。
()()⎪⎪⎪⎭⎫ ⎝⎛'-''-''-'++⎪⎪⎪⎭⎫ ⎝⎛'''+⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫ ⎝⎛K iK i Ki Z Y X K K K i i i Z Z Y Y X X Z Y X Z Y X Z Y X εεεδμ,,1000R旋转角为小角度时,上式可简化为:δμεεεεεε⎪⎪⎪⎭⎫⎝⎛'-''-''-'+⎪⎪⎪⎭⎫ ⎝⎛'-''-''-'⎪⎪⎪⎭⎫ ⎝⎛---+⎪⎪⎪⎭⎫ ⎝⎛'-''-''-'+⎪⎪⎪⎭⎫ ⎝⎛'''+⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫ ⎝⎛Ki K i K i K i K i Ki XY X Z Y ZK i K i K iK K Ki i i Z Z Y Y X X Z Z Y Y X X Z Z Y Y X X Z Y X Z Y X Z Y X 000000 上式同样可以简化为求解转换参数的形式如下:δμεεε⎪⎪⎪⎭⎫⎝⎛'∆'∆'∆+⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎭⎫⎝⎛'∆'∆-'∆'∆'∆'∆-+⎪⎪⎪⎭⎫ ⎝⎛'''+⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫ ⎝⎛iKiK iK Z Y X iKiK iKikiKiK i i i i i i Z Y X X Y X Z Y Z Z Y X Z Y X Z Y X 000000 其中,⎪⎪⎪⎭⎫ ⎝⎛'-''-''-'=⎪⎪⎪⎭⎫⎝⎛'∆'∆'∆K iK i Ki iK iKiKZ Z Y Y X X Z Y X相应于Molodensky 模型的坐标差的转换模型与Bursa-Wolf 模型相同。
测量学中的坐标系和他们之间相互转换
二、研究对象二地球表面地物的形状和空间位置,空间位置要用坐标表示,所以研究坐标系及其相互之间的转换非常重要。
下面是相关坐标系分类及相互转换: 1、天球坐标系首先了解什么是天球:以地球质心为中心以无穷大为半径的假想球体。
天球 天球坐标系天球坐标系在描述人造卫星等相对地球运动的物体是很方便,他是以地球质心为中心原点的,分为球面坐标系和直角坐标系。
球面:原点O 到空间点P 距离r 为第一参数,OP 与OZ 夹角θ为第二参数,面OPZ 和面OZX 夹角α为第三参数。
直角:用右手定则定义,通常X 轴指向赤道与初始子午线的交点。
相互转换:⎪⎪⎩⎪⎪⎨⎧+==++=)/arctan()/arctan(22222Y X Z X Y Z Y X r βα 2、大地坐标系大地坐标在描述地面点的位置是非常有用, 是通过一个辅助面(参考椭球)定义的, 分为大地坐标系和直角坐标系。
H 为大地高,一般GPS 测量用,大地坐标系大地坐标系:大地纬度B 为空间点P 的椭球法面与面OXY 夹角,大地经度L 为ZOX 与ZOP 夹角,大地高程H 为P 点沿法线到椭球面距离直角坐标系:椭球几何中心与直角坐标系原点重合,短半轴与Z 轴重合,其他符合右手定则。
相互转换:黄赤交角23°27′X YZ oP春分点黄道 天球赤道 起始子午面L B PH[]⎪⎩⎪⎨⎧+=+=-=+-=L B H N X L B H N Y B e a N B H e N Z cos cos )(sin cos )(e ,2sin 21/ sin )21(为第一扁率卯酉全曲率半径,其中3、惯性坐标系(CIS )与协议天球坐标系① 惯性坐标系(CIS ):在空间不动或做匀速直线运动的坐标系.② 协议天球坐标系:以某一约定时刻t0作为参考历元,把该时刻对应的瞬时自转轴经岁差和章动改正后作为Z 轴,以对应的春分点为X 轴的指向点,以XOZ 的垂直方向为Y 轴方向建立的天球坐标系。
空间直角坐标系与空间大地坐标系的相互转换及其C++源程序
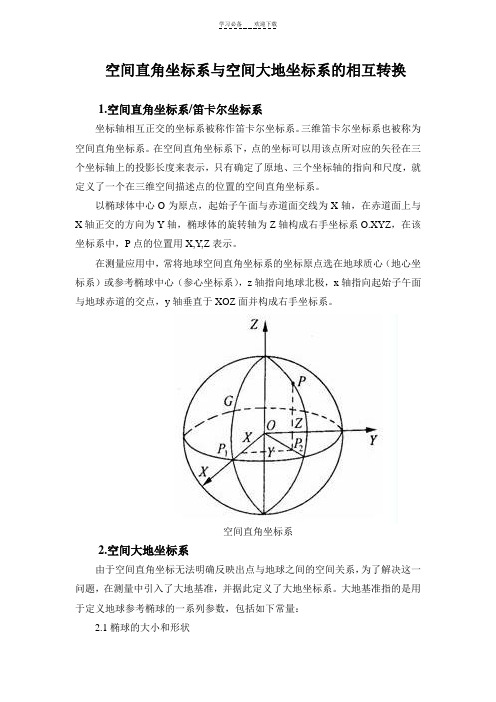
空间直角坐标系与空间大地坐标系的相互转换1.空间直角坐标系/笛卡尔坐标系坐标轴相互正交的坐标系被称作笛卡尔坐标系。
三维笛卡尔坐标系也被称为空间直角坐标系。
在空间直角坐标系下,点的坐标可以用该点所对应的矢径在三个坐标轴上的投影长度来表示,只有确定了原地、三个坐标轴的指向和尺度,就定义了一个在三维空间描述点的位置的空间直角坐标系。
以椭球体中心O为原点,起始子午面与赤道面交线为X轴,在赤道面上与X轴正交的方向为Y轴,椭球体的旋转轴为Z轴构成右手坐标系O.XYZ,在该坐标系中,P点的位置用X,Y,Z表示。
在测量应用中,常将地球空间直角坐标系的坐标原点选在地球质心(地心坐标系)或参考椭球中心(参心坐标系),z轴指向地球北极,x轴指向起始子午面与地球赤道的交点,y轴垂直于XOZ面并构成右手坐标系。
空间直角坐标系2.空间大地坐标系由于空间直角坐标无法明确反映出点与地球之间的空间关系,为了解决这一问题,在测量中引入了大地基准,并据此定义了大地坐标系。
大地基准指的是用于定义地球参考椭球的一系列参数,包括如下常量:2.1椭球的大小和形状2.2椭球的短半轴的指向:通常与地球的平自转轴平息。
2.3椭球中心的位置:根据需要确定。
若为地心椭球,则其中心位于地球质心。
2.4本初子午线:通过固定平极和经度原点的天文子午线,通常为格林尼治子午线。
以大地基准为基础建立的坐标系被称为大地坐标系。
由于大地基准又以参考椭球为基准,因此,大地坐标系又被称为椭球坐标系。
大地坐标系是参心坐标系,其坐标原点位于参考椭球中心,以参考椭球面为基准面,用大地经度L、纬度B 和大地高H表示地面点位置。
过地面点P的子午面与起始子午面间的夹角叫P 点的大地经度。
由起始子午面起算,向东为正,叫东经(0°~180°),向西为负,叫西经(0°~-180°)。
过P点的椭球法线与赤道面的夹角叫P点的大地纬度。
由赤道面起算,向北为正,叫北纬(0°~90°),向南为负,叫南纬(0°~-90°)。
大地、地心空间直角和球面三种坐标的转换

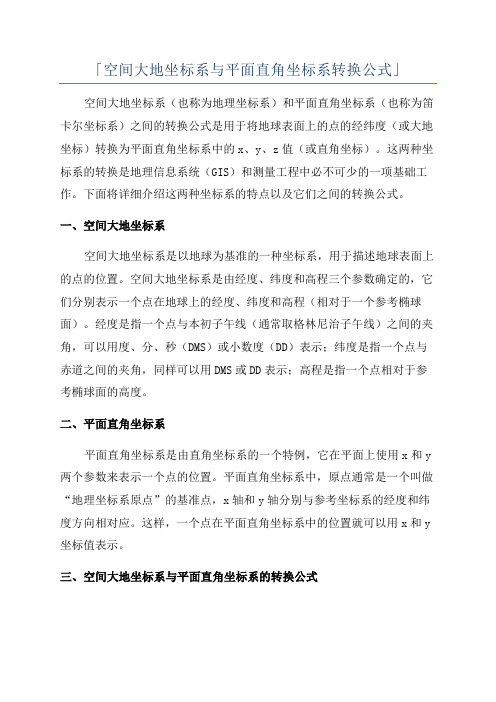
第一章大地坐标第一节大地坐标系统科技名词定义中文名称:大地坐标系英文名称:geodetic coordinate system定义:以参考椭球中心为原点、起始子午面和赤道面为基准面的地球坐标系。
应用学科:测绘学(一级学科);大地测量学(二级学科)大地坐标系(geodetic coordinate system)是大地测量中以参考椭球面为基准面建立起来的坐标系。
地面点的位置用大地经度、大地纬度和大地高度表示。
大地坐标系的确立包括选择一个椭球、对椭球进行定位和确定大地起算数据。
一个形状、大小和定位、定向都已确定的地球椭球叫参考椭球。
参考椭球一旦确定,则标志着大地坐标系已经建立。
大地坐标系亦称为地理坐标系。
大地坐标系是用来表述地球上点的位置的一种地区坐标系统。
它采用一个十分近似于地球自然形状的参考椭球作为描述和推算地面点位置和相互关系的基准面。
一个大地坐标系统必须明确定义其三个坐标轴的方向和其中心的位置。
通常人们用旋转椭球的短轴与某一规定的起始子午面分别平行干地球某时刻的平均自转轴和相应的真起始子午面来确定坐标轴的方向。
若使参考椭球中心与地球平均质心重合,则定义和建立了地心大地坐标系。
它是航天与远程武器和空间科学中各种定位测控测轨的依据。
若椭球表面与一个或几个国家的局部大地水准面吻合最好,则建立了一个国家或区域的局部大地坐标系。
大地坐标系中点的位置是以其大地坐标表示的,大地坐标均以椭球面的法线来定义。
其中,过某点的椭球面法线与椭球赤道面的交角为大地纬度;包含该法线和大地子午面与起始大地子午面的二面角为该点的大地经度;沿法线至椭球面的距离为该点的大地高。
大地纬度、大地经度和大地高分别用大写英文字母B、L、H表示。
大地坐标系是以地球椭球赤道面和大地起始子午面为起算面并依地球椭球面为参考面而建立的地球椭球面坐标系。
它是大地测量的基本坐标系,其大地经度L、大地纬度B和大地高H为此坐标系的3个坐标分量。
它包括地心大地坐标系和参心大地坐标系。
大地坐标系与空间直角坐标系的相互转换python
大地坐标系与空间直角坐标系的相互转换Python在地理信息系统(GIS)中,常常需要将大地坐标系(地理坐标系)与空间直角坐标系(笛卡尔坐标系)进行相互转换。
大地坐标系使用经纬度来表示地球表面上的任意点,而空间直角坐标系使用直角坐标来表示点在三维空间中的位置。
Python提供了一些库和工具,可以方便地进行这种转换。
大地坐标系与空间直角坐标系的基本概念大地坐标系(地理坐标系)大地坐标系是一种用经纬度来表示地球表面上任意点的坐标系。
经度表示点相对于本初子午线的位置(东经为正、西经为负),纬度表示点相对于赤道的位置(北纬为正、南纬为负)。
空间直角坐标系(笛卡尔坐标系)空间直角坐标系是一种使用直角坐标来表示点在三维空间中的位置的坐标系。
在空间直角坐标系中,每个点的位置由其相对于三个互相垂直的坐标轴的坐标值确定。
大地坐标系与空间直角坐标系的转换大地坐标系与空间直角坐标系之间的转换涉及到各种地球椭球参数和数学公式。
幸运的是,Python的一些库和工具已经实现了这些转换,使得我们可以很方便地进行转换操作。
Geopy库Geopy是一个Python库,提供了许多地理坐标系之间相互转换的功能。
使用Geopy,我们可以方便地进行大地坐标系到空间直角坐标系的转换。
首先,我们需要安装Geopy库。
可以使用pip命令来进行安装:pip install geopy接着,我们可以使用以下代码将大地坐标系的经纬度转换为空间直角坐标系的三维坐标:```python from geopy import Point from geopy.distance import distance定义大地坐标系的经纬度latitude = 40.7128 longitude = -74.0060将经纬度转换为空间直角坐标系的三维坐标point = Point(latitude, longitude) x, y, z = point.to_cartesian() print(f。
大地坐标与空间直角坐标转换

大地坐标与空间直角坐标转换在地理空间相关的领域中,大地坐标和空间直角坐标是两种常用的坐标系统。
大地坐标通常用经度和纬度表示,是为了描述地球表面上的点的位置而设计的坐标系统;而空间直角坐标则是一种常用的三维笛卡尔坐标系,用来描述平面内的点的位置。
在实际应用中,有时候我们需要将一个点从大地坐标系转换到空间直角坐标系,或者反过来进行转换,这就需要进行一定的坐标转换计算。
大地坐标的表示大地坐标通常是以经度(Longitude)和纬度(Latitude)表示的。
经度表示东西方向,是一个0到360度的值,通常以东经为正值,西经为负值。
纬度表示南北方向,是一个-90到90度的值,赤道为0度,南纬为负值,北纬为正值。
空间直角坐标的表示空间直角坐标是以直角坐标系表示的,通常是三维笛卡尔坐标系,包括X、Y和Z三个坐标轴。
X轴和Y轴在平面内垂直,Z轴垂直于平面,组成一个右手坐标系。
一个点在空间直角坐标系中的位置可以由其X、Y和Z坐标值表示。
大地坐标与空间直角坐标的转换大地坐标和空间直角坐标之间的转换涉及到地球的椭球面和大地水准面的关系,通常需要考虑椭球体参数、大地水准面的高度等因素。
实际转换过程中可能涉及到大圆距离、球面三角计算等复杂的数学运算。
结论大地坐标与空间直角坐标之间的转换是地理信息处理中一个重要的问题,通常需要借助专业的地理信息系统软件或者编程语言进行计算。
在进行坐标转换时,需要考虑到地球的椭球体特征以及大地水准面的高度影响,以确保转换的准确性。
对于从事地理测绘、地图制作、地理信息系统等领域的人员,熟练掌握大地坐标与空间直角坐标之间的转换方法是非常重要的。
以上就是关于大地坐标与空间直角坐标转换的一些内容,希望对您有所帮助。
常用坐标系之间的关系与转换
7.5 常用坐标系之间的关系与转换一、大地坐标系和空间大地直角坐标系及其关系 大地坐标系用大地纬度企丈地经度L 和丈地髙H 来表示点的位置°这种坐标系是经 典大地测量甬:両用座标紊7屜据地图投影的理论,大地坐标系可以通过一定的投影转 化为投影平面上的直角坐标系,为地形测图和工程测量提供控制基础。
同时,这种坐标系 还是研究地球形状和大小的 种有用坐标系°所以大地坐标系在大地测量中始终有着重要 的作用.空间大地直角坐标系是-种以地球质心为原点购亘墮®坐标系,一般用X 、化Z 表 示点BSSTSTT 逐碇SS 範菇飞両H 绕禎扭转冻其轨道平面随时通过 地球质心。
对它们的跟踪观测也以地球质心为坐标原点,所以空间大地直角坐标系是卫星 大地测量中一种常用的基本坐标系。
现今,利用卫星大地测量的手段*可以迅速地测定点的空间大地直角坐拯,广泛应用于导航定位等空间技术。
同时经过数学变换,还可求岀点 的大地坐标I 用以加强和扩展地面大地网,进行岛屿和洲际联测,使传统的大地测量方法 发生了深刻的变化,所以空间大地宜角坐标系对现今大地测量的发展’具有重要的意义。
、大地坐标系和空间大地直角坐标系的转换如图7- 23所示’尸点的位置用空间 大地直角坐标〔X, Y, Z)表示,其相应 的大地坐标为(E, L)a 将该图与图?一5加以比较可见,图7-5中的子午椭圆平面 相当于图7-23中的OJVP 平面.其中 PPz=Z.相当于图7-5中的j7;OP 3相当 丫于图7-5中的仏两平面的经度乙可视为相同,等于"叽 于是可以直接写岀X=jrcQsi f Y=jrsinL, Z=y将式(7-21).式(7-20)分别代入上式, 井考虑式(7-26)得X=Ncos^cosZr ”Y =NcQsBsinL > (7—78)Z=N (1—护〉sin^ ;上式表明了 2种基本坐标系之间的关系。
BB 7-231.由大地坐标求空间大地直角坐标当已知椭球面上任一点P 的大地坐标(B, L)时,可以按式(7-78)直接求该点的 空间大地直角坐标(X, Y, Z)。
空间大地坐标系与平面直角坐标系转换公式
§2.3.1 坐标系的分类正如前面所提及的,所谓坐标系指的是描述空间位置的表达形式,即采用什么方法来表示空间位置。
人们为了描述空间位置,采用了多种方法,从而也产生了不同的坐标系,如直角坐标系、极坐标系等。
在测量中常用的坐标系有以下几种:一、空间直角坐标系空间直角坐标系的坐标系原点位于参考椭球的中心,Z 轴指向参考椭球的北极,X 轴指向起始子午面与赤道的交点,Y 轴位于赤道面上且按右手系与X 轴呈90°夹角。
某点在空间中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。
空间直角坐标系可用图2-3来表示:图2-3 空间直角坐标系二、空间大地坐标系空间大地坐标系是采用大地经、纬度和大地高来描述空间位置的。
纬度是空间的点与参考椭球面的法线与赤道面的夹角;经度是空间中的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地高是空间点沿参考椭球的法线方向到参考椭球面的距离。
空间大地坐标系可用图2-4来表示:图2-4空间大地坐标系三、平面直角坐标系平面直角坐标系是利用投影变换,将空间坐标空间直角坐标或空间大地坐标通过某种数学变换映射到平面上,这种变换又称为投影变换。
投影变换的方法有很多,如横轴墨卡托投影、UTM 投影、兰勃特投影等。
在我国采用的是高斯-克吕格投影也称为高斯投影。
UTM 投影和高斯投影都是横轴墨卡托投影的特例,只是投影的个别参数不同而已。
高斯投影是一种横轴、椭圆柱面、等角投影。
从几何意义上讲,是一种横轴椭圆柱正切投影。
如图左侧所示,设想有一个椭圆柱面横套在椭球外面,并与某一子午线相切(此子午线称为中央子午线或轴子午线),椭球轴的中心轴CC ’通过椭球中心而与地轴垂直。
高斯投影满足以下两个条件:1、 它是正形投影;2、 中央子午线投影后应为x 轴,且长度保持不变。
将中央子午线东西各一定经差(一般为6度或3度)范围内的地区投影到椭圆柱面上,再将此柱面沿某一棱线展开,便构成了高斯平面直角坐标系,如下图2-5右侧所示。
「空间大地坐标系与平面直角坐标系转换公式」
「空间大地坐标系与平面直角坐标系转换公式」空间大地坐标系(也称为地理坐标系)和平面直角坐标系(也称为笛卡尔坐标系)之间的转换公式是用于将地球表面上的点的经纬度(或大地坐标)转换为平面直角坐标系中的x、y、z值(或直角坐标)。
这两种坐标系的转换是地理信息系统(GIS)和测量工程中必不可少的一项基础工作。
下面将详细介绍这两种坐标系的特点以及它们之间的转换公式。
一、空间大地坐标系空间大地坐标系是以地球为基准的一种坐标系,用于描述地球表面上的点的位置。
空间大地坐标系是由经度、纬度和高程三个参数确定的,它们分别表示一个点在地球上的经度、纬度和高程(相对于一个参考椭球面)。
经度是指一个点与本初子午线(通常取格林尼治子午线)之间的夹角,可以用度、分、秒(DMS)或小数度(DD)表示;纬度是指一个点与赤道之间的夹角,同样可以用DMS或DD表示;高程是指一个点相对于参考椭球面的高度。
二、平面直角坐标系平面直角坐标系是由直角坐标系的一个特例,它在平面上使用x和y 两个参数来表示一个点的位置。
平面直角坐标系中,原点通常是一个叫做“地理坐标系原点”的基准点,x轴和y轴分别与参考坐标系的经度和纬度方向相对应。
这样,一个点在平面直角坐标系中的位置就可以用x和y 坐标值表示。
三、空间大地坐标系与平面直角坐标系的转换公式空间大地坐标系与平面直角坐标系之间的转换可分为大地坐标到直角坐标的转换和直角坐标到大地坐标的转换两个方向。
这里,我们主要关注大地坐标到直角坐标的转换过程。
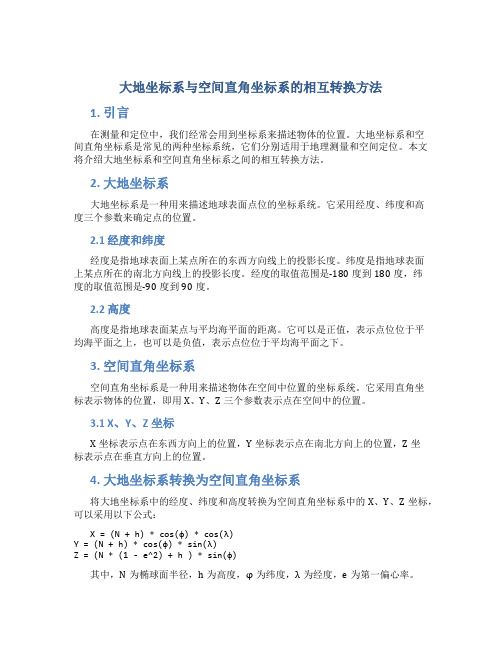
大地坐标到直角坐标的转换公式如下:1.计算参考椭球面的参数首先,需要确定参考椭球面的参数,包括椭球长半轴a、扁率f以及椭球表面上任意一点的第一偏心率e。
这些参数通常可以从现有的地理坐标系参数库中获取。
2.计算大地坐标到空间直角坐标的转换设待转换的点在大地坐标系下的经度、纬度、高程分别为(λ,φ,H),则转换公式如下:X = (N + H) * cosφ * cosλY = (N + H) * cosφ * sinλZ = (N * (1 - e²) + H) * sinφ其中,N是参考椭球面上其中一点的曲率半径,由以下公式计算得到:N = a / (1 - e² * sin²φ)² 的平方根通过这些公式,可以将一个点从大地坐标系转换为平面直角坐标系中的x、y、z值。
大地、地心空间直角和球面三种坐标的转换讲解
第一章大地坐标第一节大地坐标系统科技名词定义中文名称:大地坐标系英文名称:geodetic coordinate system定义:以参考椭球中心为原点、起始子午面和赤道面为基准面的地球坐标系。
应用学科:测绘学(一级学科);大地测量学(二级学科)大地坐标系(geodetic coordinate system)是大地测量中以参考椭球面为基准面建立起来的坐标系。
地面点的位置用大地经度、大地纬度和大地高度表示。
大地坐标系的确立包括选择一个椭球、对椭球进行定位和确定大地起算数据。
一个形状、大小和定位、定向都已确定的地球椭球叫参考椭球。
参考椭球一旦确定,则标志着大地坐标系已经建立。
大地坐标系亦称为地理坐标系。
大地坐标系是用来表述地球上点的位置的一种地区坐标系统。
它采用一个十分近似于地球自然形状的参考椭球作为描述和推算地面点位置和相互关系的基准面。
一个大地坐标系统必须明确定义其三个坐标轴的方向和其中心的位置。
通常人们用旋转椭球的短轴与某一规定的起始子午面分别平行干地球某时刻的平均自转轴和相应的真起始子午面来确定坐标轴的方向。
若使参考椭球中心与地球平均质心重合,则定义和建立了地心大地坐标系。
它是航天与远程武器和空间科学中各种定位测控测轨的依据。
若椭球表面与一个或几个国家的局部大地水准面吻合最好,则建立了一个国家或区域的局部大地坐标系。
大地坐标系中点的位置是以其大地坐标表示的,大地坐标均以椭球面的法线来定义。
其中,过某点的椭球面法线与椭球赤道面的交角为大地纬度;包含该法线和大地子午面与起始大地子午面的二面角为该点的大地经度;沿法线至椭球面的距离为该点的大地高。
大地纬度、大地经度和大地高分别用大写英文字母B、L、H表示。
大地坐标系是以地球椭球赤道面和大地起始子午面为起算面并依地球椭球面为参考面而建立的地球椭球面坐标系。
它是大地测量的基本坐标系,其大地经度L、大地纬度B和大地高H为此坐标系的3个坐标分量。
它包括地心大地坐标系和参心大地坐标系。
大地测量常用坐标系及其转换

常用坐标系及其转换
1、常用坐标系
大地坐标系:以地球椭球面为参考面的地球椭球面坐标系(LBH)。
(参心、地心)
空间直角坐标系(XYZ)
站心(局部)直角坐标系(UNE)极坐标系
直角坐标系原点位于测站点
U轴与测站点法线重合,指向天顶
N轴垂直于U轴,指向(北)
E轴形成左手系(东)
站心极坐标系用极距、方位角和高度角表示
常用坐标系及其转换
1、常用坐标系
高斯直角坐标系(xyH)
高斯投影的条件是:
满足正形投影条件(柯西黎曼方程)
中央子午线投影后为直线
中央子午线投影后长度不变(其它线变长)
2、坐标系转换
XYZ LBH(同一参考系下换算)
XYZ NEU(同一参考系下换算,已知站心的大地或空间直角坐标) 不同参考系下坐标系转换(用XYZ转换公式,B 模型和M
模型,七参数-平移量旋转量各3,一个尺度因子;
四参数一般是针对平面坐标的转换-2个平移,一个旋转,一个尺度) LBH xyH(球面化为平面,注意中央子午线选取和分带,H为大地高)
2、坐标系转换
不同坐标系之间常用BURSA 模型,七参数)
2、坐标系转换
局部小范围内,对高斯平面坐标可用四参数模型
四、我国的大地坐标系
(一)、1954年北京坐标系
(二)、1980年国家大地坐标系
(三)、2000中国大地坐标系CGCS2000
(四)、新1954年北京坐标系
(五)、1978地心坐标系
(六)、1988地心坐标系。
大地坐标系与空间直角坐标系的相互转换方法
大地坐标系与空间直角坐标系的相互转换方法1. 引言在测量和定位中,我们经常会用到坐标系来描述物体的位置。
大地坐标系和空间直角坐标系是常见的两种坐标系统,它们分别适用于地理测量和空间定位。
本文将介绍大地坐标系和空间直角坐标系之间的相互转换方法。
2. 大地坐标系大地坐标系是一种用来描述地球表面点位的坐标系统。
它采用经度、纬度和高度三个参数来确定点的位置。
2.1 经度和纬度经度是指地球表面上某点所在的东西方向线上的投影长度。
纬度是指地球表面上某点所在的南北方向线上的投影长度。
经度的取值范围是-180度到180度,纬度的取值范围是-90度到90度。
2.2 高度高度是指地球表面某点与平均海平面的距离。
它可以是正值,表示点位位于平均海平面之上,也可以是负值,表示点位位于平均海平面之下。
3. 空间直角坐标系空间直角坐标系是一种用来描述物体在空间中位置的坐标系统。
它采用直角坐标表示物体的位置,即用X、Y、Z三个参数表示点在空间中的位置。
3.1 X、Y、Z坐标X坐标表示点在东西方向上的位置,Y坐标表示点在南北方向上的位置,Z坐标表示点在垂直方向上的位置。
4. 大地坐标系转换为空间直角坐标系将大地坐标系中的经度、纬度和高度转换为空间直角坐标系中的X、Y、Z坐标,可以采用以下公式:X = (N + h) * cos(φ) * cos(λ)Y = (N + h) * cos(φ) * sin(λ)Z = (N * (1 - e^2) + h ) * sin(φ)其中,N为椭球面半径,h为高度,φ为纬度,λ为经度,e为第一偏心率。
5. 空间直角坐标系转换为大地坐标系将空间直角坐标系中的X、Y、Z坐标转换为大地坐标系中的经度、纬度和高度,可以采用以下公式:φ = atan(Z / sqrt(X^2 + Y^2))λ = atan(Y / X)h = sqrt(X^2 + Y^2 + Z^2) - N其中,N为椭球面半径,φ为纬度,λ为经度,h为高度。
大地坐标系与空间直角坐标系的相互转换公式

大地坐标系与空间直角坐标系的相互转换公式概述大地坐标系和空间直角坐标系是地理信息系统中两种常用的坐标系。
大地坐标系主要用于描述地球上点的位置,而空间直角坐标系则是使用笛卡尔坐标系的三维空间中的坐标来表示点的位置。
在地理信息系统中,需要经常进行大地坐标系和空间直角坐标系之间的转换,以便在不同的坐标系统之间进行数据交互和分析。
大地坐标系大地坐标系是一种基于地球椭球体的坐标系统,常用来描述地球上点的位置。
一般采用经度(longitude)、纬度(latitude)和高程(elevation)来表示点在地球表面的位置。
经度表示点在东经或西经的位置,纬度表示点在北纬或南纬的位置,高程表示点相对于海平面的高度。
大地坐标系中经度的表示方式有多种,常见的有度分秒制和十进制制。
而纬度则一般用度制表示。
对于高程的表示方式,通常使用米作为单位。
空间直角坐标系空间直角坐标系是使用笛卡尔坐标系的三维空间中的坐标来表示点的位置。
在空间直角坐标系中,每个点的位置由三个数值组成,分别表示点在X轴、Y轴和Z轴方向上的位置。
这三个数值通常以米为单位。
空间直角坐标系中的原点可以选择任意位置,常见的有地心、地心地固、地心地独立三种坐标系。
地心坐标系以地球质心为原点,地心地固坐标系以地球上某一固定点为原点,地心地独立坐标系则是相对于地轴的一个旋转坐标系。
大地坐标系到空间直角坐标系的转换将大地坐标系中的点转换为空间直角坐标系中的点需要使用转换公式。
常用的转换方法有大地测量学和地心测量学两种。
### 大地测量学方法大地测量学方法中,将地球近似为椭球体,利用椭球体的形状参数和点的大地坐标来进行转换。
该方法的核心思想是通过计算点在曲线面上的法线方向,将大地坐标系的点转换为空间直角坐标系的点。
### 地心测量学方法地心测量学方法中,将地球近似为球体,并以地球质心或地球上某一固定点为原点。
该方法利用球面三角学的原理,根据点的经纬度和高程来进行转换。
坐标转换模型

坐标转换模型1.空间直角坐标系间的转换模型(七参数模型)①公式(布尔莎模型):②分析:(1)将O-XYZ中的长度单位缩放l+m倍,使其与O'-X'Y'Z'的长度单位一致;(2)从X反向看向原点O,以O为旋转点,让O-XYZ绕X轴顺时针旋转Wx角,使经过旋转后的Y轴与O'-X'Y'Z’平面平行;(3)从Y反向看向原点O,以O为旋转点,让O-XYZ绕Y轴顺时针旋转Wy角,使经过旋转后的X轴与O'-X'Y'Z'平面平行。
显然,此时Z轴也与Z'轴平行; (4)从Z反向看向原点O,以O点为旋转点,O-XYZ绕Z轴顺时针旋转Wz角,使经过旋转后的X轴与X’轴平行。
显然,此时O-XYZ的三个坐标轴己与O'-X'Y'Z’中相应的坐标轴平行;原坐标为O-XYZ,转换到新坐标O-X’Y’Z’.(两坐标系都为空间直角坐标系)其中(dX dY dZ)为坐标原点的平移参数,即将坐标O-XYZ的原点分别沿三个坐标轴平移-dX,-dY,-dZ,使原坐标轴与O-X’Y’Z’的点重合。
m为尺度参数,(w1 w2 w3)分别为坐标轴的旋转参量(角度),构成的旋转矩阵分别为:分别将R1 R2 R3代入上式,可得:当旋转角度w1 w2 w3很小时(<=10),cos(w)=1,sin(w)=0;在误差允许范围内可以将模型简化为:(同样七参数模型)四参数模型是在七参数模型的特例,没有考虑坐标轴的旋转量,只考虑坐标轴的平移。
总结:类似布尔莎模型(以坐标原点为参考点),还有莫洛金斯基坐标模型(以目标点为变换中心)、武测转换模型和范士转换模型(以控制网参考点的站心地平坐标系的三个坐标轴为旋转轴),这些坐标转换模型很容易实现相关坐标在不同坐标系的转换,但是参考位置的偏移向量的相关参数,在实际运用中这些参量是很难测定的,并且受地球重力等物理因素的影响,两个坐标系统即使经过相似变换,仍可能存在较大的残差,所以这些模型适用于简单且规则模型中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
N cos B cos L a N sin 2 B cos B cos L 2W 2 2 2 其中: B = N cos B sin L a N sin B cos B sin L 2W N 1 − e 2 sin B a − N cos 2 B + W 2 cos B 2W 2
§2.4 空间大地直角坐标系及其转换模型
2.4.1 空间直角坐标系与相应大地坐标系的关系
1、X、Y、Z与B、L、H间的关系 、 、 、 与 、 、 间的关系 空间坐标系的定义: 空间坐标系的定义:Z//自转轴,X位于赤道面,指格林 尼治天文台,Y指东,构成右手系。 大地坐标系的定义: 大地坐标系的定义:B为过坐标点椭球面的法线与赤道面 交角、L为过坐标点的子午线与起始子午线的夹角,H Z 为点沿法线到椭球面的距离。 大地高与正高、正常高之间的关系: 大地高与正高、正常高之间的关系: P L
1
( (
)
)
2.4.1 空间直角坐标系与相应大地坐标系的关系
2、由X、Y、Z计算 、L、H的迭代解法 、 计算B、 、 的迭代解法 、 、 计算 计算L:
Y L = tan = sin 迭代计算B:
B
(i +1)
= tan
−1
Z + N (i )e 2 sin B (i ) X 2 +Y 2
Z X 2 +Y 2
迭代初值为: B
(0 )
= tan
−1
最后计算H: H = Z csc B − N (1 − e 2 ) = X 2 + Y 2 sec B − N
2.4.1 空间直角坐标系与相应大地坐标系的关系
3、X、Y、Z与B、L、H间的微分关系 、 、 、 与 、 、 间的微分关系 由前面 1 式微分得;
L P′
O
B
Z
P
(
)
rP′P
H cos B cos L = Hn = H cos B sin L H sin B
Y
Q
KP
X
X ( N + H ) cos B cos L Y = rOP = rOP′ + rP′P = ( N + H ) cos B sin L Z N 1 − e 2 + H sin B
Z Z ′′ Z′
εY ε X
Y
O
εY
εX
εZ
Y ′′ Y′
εZ
X ′′
X
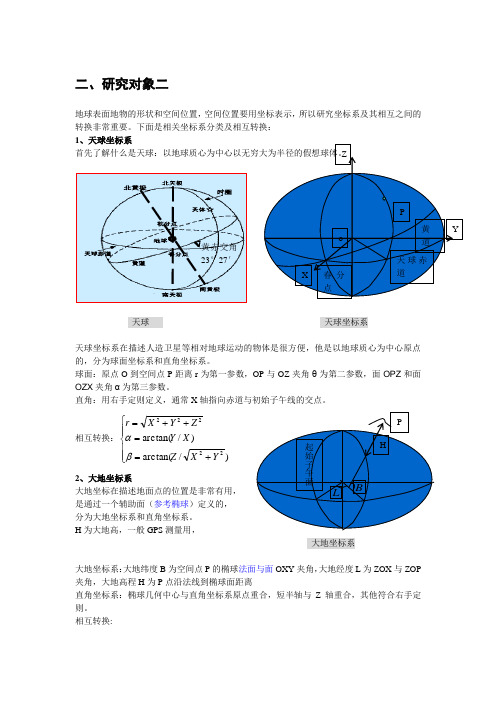
2.4.2 空间直角坐标系之间的旋转变换
坐标变换公式为:
X X ′ Y = R Z (ε Z )R Y ′′ (ε Y )R X ′ (ε X ) Y ′ Z Z′
Z Z ′′ Z′
εY ε X
Y
O
其中,旋转矩阵:
R = R Z (ε Z )R Y ′′ (ε Y )R X ′ (ε X ) X ′
εY
εX
εZ
Y ′′ Y′
εZ
是正交矩阵。
X ′′
X
2.4.2 空间直角坐标系之间的旋转变换
若α、β、 γ分别表示X与X’、Y与Y’和Z与Z’之 间的夹角,则有:
dX − (M + H )sin B cos L − ( N + H ) cos B sin L cos B cos L dB dY = − (M + H )sin B sin L ( N + H ) cos B cos L cos B sin L dL dZ (M + H ) cos B 0 sin B dH dB = AJ dL dH
O
Y ′′′ Y ′′ Y
旋转矩阵:
R = R Z − ε Z 2 R X ′′ (ε X )R Z ′ ε Z1
(
)
( )
X′ X X ′′
Y′
是正交矩阵。
2.4.2 空间直角坐标系之间的旋转变换
若γ表示Z与Z’之间的夹角,则有:
cos γ = cos ε X
若α、β分别表示X与X’和Y与Y’之间的夹角,则有:
cos β = sin ε Z1 sin ε Z 2 + cos ε Z1 cos ε Z 2 cos ε X cos α = cos ε Z1 cos ε Z 2 + sin ε Z1 sin ε Z 2 cos ε X
2.4.2 空间直角坐标系之间的旋转变换
方法二: 方法二: 转换到X、 将X’、Y’、Z’转换到 、 、 、 转换到 Y 、 Z 坐 标 系 : 先绕X’将Y’旋转到YOZ 平面与Y’OZ’平面的交线 Y” ,再绕Y” 轴将Z ”旋 转到Z轴,最后再绕Z轴, 将X” 旋转到X轴方向。 X ′ 由于 三 坐 标 轴的正 交关 系, 经 最 后 一次旋 转的 Y”必位于Y轴上。
1 旋转矩阵简化为: R = − ε Z ε Y
εZ
1 −εX
− εY εX 1
坐标转换模型简化为:
X 1 Y = −εZ Z ε Y
εZ
1 −εX
− ε Y X ′ ε X Y ′ 1 Z ′
N cos B sin B 2 − e 2 sin 2 B 2 2W (M + H ) da 0 de 2 2 N sin B 2
(
)
2.4.2 空间直角坐标系之间的旋转变换
两个右手旋转坐标系之间的旋转角,取逆时针旋 转为正,顺时针旋转为负,旋转矩阵为正交阵,可表 示为:
Z′
Y ′′′
O
Y ′′ Y
X′ X X ′′
Y′
2.4.2 空间直角坐标系之间的旋转变换
坐标变换公式为:
X Y = R Z − ε Z 2 R X ′′ (ε X )R Z ′ ε Z1 Z
Z Z′
(
)
( )
X ′ Y′ Z′
2.4.1 空间直角坐标系与相应大地坐标系的关系
顾及A是正交阵,J是对角阵,得:
dB dX dX −1 −1 T dL = (AJ ) dY = J A dY dH dZ dZ sin B cos L − M +H sin L − = ( N + H ) cos B cos B cos L sin B sin L M +H cos L (N + H ) cos B − cos B sin L cos B M + H dX dY 0 dZ sin B
0 1 R X (ε X ) = 0 cos ε X 0 − sin ε X sin ε X cos ε X 0
cos ε Y R Y (ε Y ) = 0 sin ε Y
sin ε Z cos ε Z 0 0 0 1
0 − sin ε Y 1 0 0 cos ε Y
(
)
(
)
2.4.1 空间直角坐标系与相应大地坐标系的关系
由上式可得:
dB dX −1 T da −1 T dL = J A dY − J A B 2 de dH dZ
若空间坐标系的原点和坐标轴指向保持 不变,即椭球的定位与定向不变,则:
M + H 其中: J = 0 0 0 0 (N + H ) cos B 0 0 1
− sin B cos L − sin L cos B cos L A = − sin B sin L cos L cos B sin L cos B 0 sin B
r11r31 + r12 r32 + r13r33 = 0 r21r31 + r22 r32 + r23r33 = 0
2 2 2 r11 + r12 + r13 = 1 2 2 2 r21 + r22 + r23 = 1 2 2 2 r31 + r32 + r33 = 1
2.4.2 空间直角坐标系之间的旋转变换
H = H N + N = Hζ + ζ
X
P′
O
B Y
KP
Q
2.4.1 空间直角坐标系与相应大地坐标系的关系
如图所示:
rOP′ X N cos B cos L = Y = N cos B sin L Z N 1 − e 2 sin B P′
dX dY = 0 dZ
2.4.1 空间直角坐标系与相应大地坐标系的关系
上式简化成大地坐标与椭球间的微分关系:
dB −1 T da dL = −J A B 2 de dH e 2 cos B sin B W (M + H ) 0 = −W
2.4.2 空间直角坐标系之间的旋转变换
旋转矩阵是正交阵,满足条件:
r11 R = r21 r 31 r12 r22 r32 r13 r23 r33
RR T = I
若:
则根据正交条件,得: r r + r r + r r = 0 11 21 12 22 13 23
cos α = cos ε Y cos ε Z cos β = cos ε X cos ε Z + sin ε X sin ε Y cos ε Z cos γ = cos ε X cos ε Y