第五章:空间任意力系
5章空间力系(交)

Fz F cos
由于力与轴平行 或相交时力对该轴的 矩为零,则有
M x F M x FZ Fz AB CD Fl bcos M y F M y FZ Fz BC Fl cos M z F M z Fx Fx AB CD Fl bsin
z Fz
F
x
Fx
Fxy
y Fy
二、 空间汇交力系的合成与平衡
1. 合成 将平面汇交力系合成结果推广得:
FR F1 F2 F n Fi
解析法 FR FRx i FRy j FRz k FR Fx i Fy j Fz k
合力的大小和方向为:
FR ( Fx )2 ( Fy )2 ( Fz )2
4力偶可改装性
4.4 空间力偶等效定理
空间力偶的等效条件是:两个力偶的力偶矩矢相等。
4、空间力偶系的合成 空间力偶系合成的最后结果为一个合力偶,
合力偶矩矢等于各力偶矩矢的矢量和。即:
M M1 M2 Mn Mi
根据合矢量投影定理:
Mx Mx, My My, Mz Mz
列平衡方程:(约束特点)
X 0 : X A TH cos 60 sin 45 TG cos 60 sin 45 0
Fx 0,
Fy 0,
Fz 0
M x (F ) 0, M y (F ) 0, M z (F ) 0
空间任意力系平衡的必要与充分条件为:力系中 各力在三个坐标轴上投影的代数和等于零,且各力对 三个轴的矩的代数和也等于零。
空间平行力系的平衡方程
Fz 0 Mx 0 My 0
材料力学 空间任意力系分析

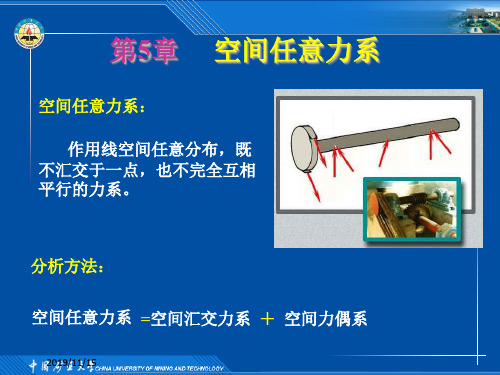
作用线位于不同平面的力系称为空间力系。
z
x
y
2
第五章 空间力系
§5–1 力在空间坐标轴上的投影
§5–2 力对轴的矩 · 力对点的矩
§5–3 空间汇交力系的合成与平衡
§5–4 空间力偶理论
§5–5 空间任意力系
§5–6 空间平行力系的中心 · 物体的重心
习题课
§5-1
力在空间坐标轴上的投影
F X 2 Y 2 Z 2
X Y Z cos ,cos ,cos F F F
Fx
Fz
Fy
6
[例1]已知:F=100N, 30, 60 ,计算图示力 在各坐标轴上的投影。
解:
Y F cos 50 3N
X F sin cos 25N Z F sin sin
的平面,方向用右手螺旋来确定 (右手握住平面的法线,卷曲四
指表示旋转方向,拇指的指向即
为力矩矢的方向)。 力矩矢的大小:
r
O
A
x
h
y
mo ( F ) F h 2AOB
13
空间力对点的矩可用矢积表示:
mO ( F ) F h F r sin rF
mO ( F ) r F i x X j k y z Y Z
z
mo ( F )
F
B
r
A
x
O
b y
a Fxy
力对点的矩矢在过该点的任一轴上的投影等于力对该 轴的矩。
[mo (F )]z mz (F )
15
利用力对点之矩与对通过该点的轴之矩的关系计算力
对点的矩。
mo ( F ) [mo ( F )]x i [mo ( F )]y j [mo ( F )]z k mx ( F )i m y ( F ) j mz ( F )k
工程力学(静力学与材料力学)单辉祖5

Generated by Foxit PDF Creator © Foxit Software For evaluation only.
工程力学电子教案
第五章 空间任意力系
X 0, TA TB cos60 0
T A TB cos60 3 1 80 11.5 ( N ) 6 2
Z F cos F sin
力沿坐标轴分解
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
由式(*)知 合力的大小:
* 合力的方向:
空间汇交力系的合力与方向余弦为:
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
力对轴的矩的概念
P39--P40
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
[例] 已知:P=2000N, C点在Oxy平面内。求:力P对坐标轴的矩。
解:
Pz Psin45 Pxy Pcos45 Px Pcos45sin60 Py Pcos45cos60
力对轴的矩的解析式
mx ( F ) yFz zFy m y ( F ) zFx xFz mz ( F ) xFy yFx
力对轴的矩的解析式
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
第5章 空间任意力系
7
例题
空间任意力系
例题2
解:
由图示可以求出力F 在 各坐标轴上的投影和力F 作 用点C 的坐标分别为:
Fx F coscos
Fy F cos sin
Fz F sin
x= a = 4 m
y= b = 6 m
z= c =-3 m
8
例题
空间任意力系
例题2
则可求得力F 对坐标轴之矩 以及对原点O之矩的大小和方向。
FD 5.8 kN
解方程得 FB 7.777 kN
28
FA 4.423 kN
例题
空间任意力系
例题9
镗刀杆的刀头在镗削工件时受到切向力Fz, 径向力Fy,轴向力 Fx的作 用。各力的大小Fz=5 000 N, Fy=1 500 N, Fx=750 N,而刀尖B 的坐标 x = 200 mm,y = 75 mm,z = 0。如果不计刀杆的重量,试求刀杆根部A 的约束 力的各个分量。
M y 0, F2xl2 Fzr Fx (l1 l2 ) 0
Mz 0, Fyr MO 0
由以上方程可以求出所有未知量。
20
例题
空间任意力系
例题6
水平传动轴上装有两个胶带轮C和D,半径分别是r1=0.4 m , r2=0.2 m . 套在C 轮上的胶带是铅垂的,两边的拉力T1=3 400 N,T2=2 000 N,套在D轮 上的胶带与铅垂线成夹角α=30o,其拉力F3=2F4。求在传动轴匀速转动时, 拉力F3和F4以及两个径向轴承处约束力的大小。
系统受空间任意力系的作用, 可写出六个平衡方程。
Fx 0,
FAx FBx (F3 F4 ) sin 30 0
第五章空间力系 第二节 力对轴的矩
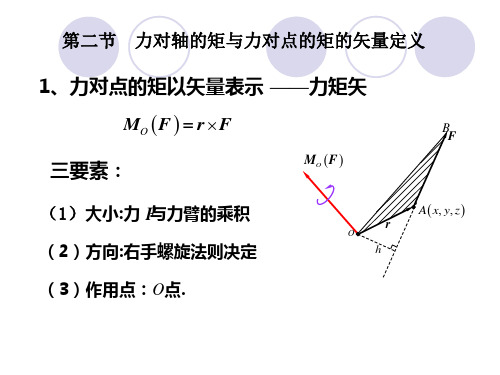
力对轴的矩与力对点的矩的矢量定义
1、力对点的矩以矢量表示 ——力矩矢
MO F = r F
B F
三要素:
(1)大小:力 F 与力臂的乘积
MO F A x, y, z
O
r
h
(2)方向:右手螺旋法则决定 (3)作用点:O点.
其中: r = xi + yj + zk
MO F = r F = x
MO (F )z xFy yFx
x
=
M O (F ) y
=
MO (F )z
MO F
z
B F
k
O
j
h
r
A x, y, z
y
i
一、力对轴的矩的定义 力对轴的矩定义为力在垂直于 轴的平面上的投影对轴与平面 交点的矩,即
Fz
F
M z F M O Fxy Fxy d
M y (F ) zFx xFz 0 l F cos Fl cos M z F xFy yFx 0 l a F sin F l a sin
两种计算方法结果同
[例2] 如图,长方体边长分别为a、b、c,沿其对角线 AB 作用一力 F。试求力 F 对 x ,z 及 y1 三轴的矩。 解:将力 F 作三维正交分解,其中分力大小
说明:1)力对轴的矩为代数量,其正负 号按右手螺旋法则确定; 2)若力的作用线与某轴相交或平 行,则力对该轴的矩必为零。
Fxy
二、力对轴的矩的解析算式
M z F M O Fxy xFy yFx MO (F )z
同理可得力 F 对 x 、y 轴的矩的
空间任意力系

2
所以空间任意力系的平衡方程为:
F F F
x y
0, M x F 0 0, M z F 0
0, M y F 0
8
z
空间平行力系的平衡方程,设各力线都 // z 轴。 因为
F 0 M (F ) 0 M (F ) 0
z x y
M F
z
MO
MO
7
§4-2
空间任意力系的条件
一、空间任意力系的平衡充要条件是:
FR
F 0
i
2 2 x y
MO
z
M
2
2
Oi
0
根据:
FR
MO
F F F
M
x (F )
M
2
y (F )
M
z (F )
O x x O y y O z z
大小:
MO
M
x
(F )
M
2
y
(F )
M2zຫໍສະໝຸດ (F )2
6
方向:
M Ox cosM O , i MO cosM O , j M Oy MO
M F
x
M F
y
MO
M Oz cosM O , k MO
空间任意力系的简化
把研究平面任意力系的简化方法拿来研究空间任意力系的
简化问题,但须把平面坐标系扩充为空间坐标系。
设作用在刚体上有
空间一般力系
F1 , F2 , F3 Fn
向O点简化 (O点任选)
4
根据力线平移定理:空间任意力系=>空间汇交力系+空间
空间任意力系
FC
最大载重Pmax是多少。
Q FB
P
D
解: 取起重机为研究对象
A
B,C
My(F)0, FAaco3s0Qa3co3s0Pclos0
MC'x(F)0,
a FA2
FBaQa2P(a2lsin)0
y C
x’
Fz 0, FAFBFCPQ0
A
ED
x
解得: FA=19.3kN, FB=57.3kN, FC=43.4kN
d O1
O
MO MO cos MO MO sin
d MO MO sin
FR
FR
一般情形下空间任意力系可合成为力螺旋
(4) 空间任意力系平衡的情形
● F′R=0,MO=0
2019/11/15
原力系平衡
内容回顾
空间力系的简化与合成
主矢
主矩
最后结果
说
明
FR′ = 0
MO = 0 MO≠0
§5-5 空间任意力系的平衡条件及其应用
1、平衡条件及平衡方程:
平衡条件:
由平衡力系定理可知,空间一般力系平衡的充要条件:力 系的主矢和对任一点的主矩都等于零,即:
平衡方程:
FR Fi 0
M O M O i 0
由主矢与主矩的计算式,有
F R (F x F x i )0 2 i, (F F yy ) i2 i0 ,(F F zz i )i2 0
② 空间任意力系的平衡条件及其应用;
2019/11/15
§5-4 空间任意力系的简化
1. 空间力线平移定理
作用于刚体的力 F 可等效地平移到刚体上的任一点O, 但须附加一力偶,此附加力偶矩 矢M 等于原力对平移点O 的力矩矢MO(F)。
工程力学第五章 空间力系(2)

14
下面用积分法求物体的重心实例: [例] 求半径为R,顶角为2 的均质圆弧的重心。
解:由于对称关系,该圆弧重心必在Ox轴,即yC=0。取微段
dL Rd
x Rcos
x dL L xC L
O
2 cos R d
2R
xC
Rsin
物体分割的越多,每一小部分体积越小,求得的重心
Pxi xC ,
位置就越准确。在极限情况下,(n),常用积分法求物
体的重心位置。
9
设i表示第i个小部分每单位体积的重量,⊿Vi第i个小 体积,则
Pi i Vi
代入上式并取极限,可得:
xdV ydV zdV V V V xC , yC , zC P P P
Pi zi PzC Pi zi , zC
P
综合上述得重心坐标公式为:
Pi xi Pi yi Pi zi xC , yC , zC P P P
12
若以△Pi= △mig , P=Mg 代入上式可得质心公式
m i x i mi yi mi zi xC , yC , zC M M M
空 间 汇 交 力 系
X 0 Y 0 Z 0
空 间 轴 力 系
X 0 m y 0 mz 0
∥x
19
X 0
面空 的间 力 系 ∥xoy
Y 0 m x 0 m y 0 mz 0
X 0 Y 0 m x 0 m y 0 mz 0 m x' 0
m y 0; Pz 50100Q x 0,Q 746( N )
3
m z A 0; 300Px 50Py 200X B 50Q cos200 0, X B 437( N ) X 0; X A X B Px Q cos200 0, X A 729( N ) m x A 0; 200Z B 300Pz 50Q sin200 0, Z B 2040( N ) Z 0; Z A Z B Pz Q sin200 0, Z A 385( N )
工程力学第五章 空间任意力系

例5
已知:Fx 4.25N,Fy 6.8N, Fz 17N, Fr 0.36F,R50mm, r30mm
各尺寸如图
求:(1) Fr , F (2)A、B处约束力(3)O 处约束力
解:研究对象1:主轴及工件,受力图如图
Fx 0 Fy 0
M x 1 . 7 k m , N M y 0 . 5 k 1 m , N M z 0 . 2 k 2 m N
例6
已知: F、P及各尺寸 求: 杆内力
解:研究对象,长方板
受力图如图 列平衡方程
M AB F0
a
F6
a P0 2
F6
P 2
M AE F0
Fz 0
F 1 c 4 o s 3 5 i s F 2 n 0 c 4 o s 3 5 i s F A n 0 c 3 o P 0 0 s 结果: F1F23.5k 4NFA8.66kN
例2
已知: 两圆盘半径均为200mm, AB =800mm,
圆盘面O1垂直于z轴,圆盘面O2垂直于x轴,
例3
已知:P=8kN, P110kN, 各尺寸如图 求:A、B、C 处约束力
解:研究对象:小车
受力:P,P1,FA,FB,FD,
列平衡方程
Fz 0 P P 1 F A F B F D 0
MxF0 0 .2 P 1 .2 P 1 2 F D 0 MyF0 0 .8 P 1 0 .6 P 1 .2 F B 0 .6 F D 0
F5 0
M AC F0
F4 0
M EF F0F6aa 2PF1
ab 0 a2b2
工程力学课后习题答案

第一章 静力学基本概念与物体的受力分析下列习题中,未画出重力的各物体的自重不计,所有接触面均为光滑接触。
1.1 试画出下列各物体(不包括销钉与支座)的受力图。
解:如图(g)(j)P (a)(e)(f)WWF F A BF DF BF AF ATF BA画出下列各物体系统中各物体(不包括销钉与支座)以及物体系统整体受力图。
解:如图F BB(b)(c)C(d)CF D(e)AFD(f)FD(g)(h)EOBO E F O(i)(j) BYFB XBFXE(k)铰链支架由两根杆AB、CD和滑轮、绳索等组成,如题图所示。
在定滑轮上吊有重为W的物体H。
试分别画出定滑轮、杆CD、杆AB和整个支架的受力图。
解:如图'D题图示齿轮传动系统,O1为主动轮,旋转方向如图所示。
试分别画出两齿轮的受力图。
解:1o xF2o xF2o yF o yFFF'结构如题图所示,试画出各个部分的受力图。
解:第二章 汇交力系在刚体的A 点作用有四个平面汇交力。
其中F 1=2kN ,F 2=3kN ,F 3=lkN , F 4=,方向如题图所示。
用解析法求该力系的合成结果。
解 00001423cos30cos45cos60cos45 1.29Rx F X F F F F KN ==+--=∑ 00001423sin30cos45sin60cos45 2.54Ry F Y F F F F KN ==-+-=∑2.85R F KN ==0(,)tan63.07Ry R RxF F X arc F ∠==题图所示固定环受三条绳的作用,已知F 1=1kN ,F 2=2kN ,F 3=。
求该力系的合成结果。
解:图示可简化为如右图所示023cos60 2.75Rx F X F F KN ==+=∑ 013sin600.3Ry F Y F F KN ==-=-∑2.77R F KN ==0(,)tan6.2Ry R RxF F X arc F ∠==-力系如题图所示。
5 理论力学--空间任意力系
O
M (F ) ,k M
z O
结 论
空间任意力系向任一点简化后,一般得到一个 力和一个力偶 。 这个力作用于简化中心,其力矢等于原力系的主矢。 这个力偶的力偶矩矢等于原力系对简化中心的主矩。 空间任意力系的主矢与简化中心的位置无关,而 主矩一般随简化中心位置的改变而改变,与简化中心 的位置有关。
z z
F
O
F A
B
d
A x
x
O d
y a F x
y
y
Fy
b
Fx
图5-2
力F对z轴的矩,就等于力F在垂直于z轴的Oxy平面 上的投影Fxy对z轴与该平面的交点O的矩(见图5-2)
M z ( F ) M O (Fxy ) Fxy d 2Oab
力对轴的矩是一个代数量。 正负号规定:右手螺旋规则。
z
任选O点为简化中心,将各力
平行搬移到O点(见图5-4)。 根据力线平移定理,将各力 平行搬移到O点,得到一空间汇 交力系;和一附加力偶系。
F1 ' F1 , F2 ' F2 , , Fn ' Fn ;
M1 M O (F1 ), M 2 M O (F2 ), , M n M O (Fn ) .
x 2 Ax
y 1 Ay
C
F2
x 0
z
1
Az
FAy
1
2
y
x
z
1
2
z
图5-9
解得
FAx 100kN FAy 200kN FAz 400kN M x 600kN m M y 500kN m M z 400kN m
例5-3 如图5-10(a)所示板ABCDEF由六根链杆支承,正方形 ABCD位于水平面内,EF平行于CD。试求沿AD方向作用有力F时, 六根杆的内力。 B 4 C 3 a 解: 取悬臂刚架ABCDEFG为研究 F 5 2 对象,受力如图5-10(b)所示。 D a
工程力学-第五章
F F
sin γ cos φ
sin
γ
sin
φ
Fz F cos γ
应当指出:力在坐标轴上的投影是代数量,有正、负两种可能;而力在平面上的投影为矢量。
5.1.3 空间汇交力系的合成与平衡条件
1.空间汇交力系的合成
设有空间汇交力系 F1,F2,…,Fn,利用力的四边形法则,可将其逐步合成为合力矢 R,
某轴之矩等于各分力对同轴的矩的代数和,即
M x FR M x F1 M x F2 M y FR M y F1 M y F2 M z FR M z F1 M z F2
Mx My
Fn Fn
Mx My
FFii
M
z
Fn
M
z
Fi
5.2.3 空间力系的合力矩定理
如图所示,设力F的作用线沿AB,O点为矩心,则力对 这一点之矩可用矢量来表示,称为力矩矢,用MO(F)表 示。力矩矢MO(F)的始端为O点,它的模(即大小)等 于力F与力臂d的乘积,方位垂直于力F与矩心O所决定的平 面,指向可用右手法则来确定。于是可得:
MO (F ) Fd 2A OAB
5.2.1 力对点之矩
5.1.3 空间汇交力系的合成与平衡条件
例 5-1 如图所示,在正方体的顶角 A 和 B 处分别作用有力 F1 和 F2,试求此二力在 x,y,z 轴上的
投影。
F1x F1 sin cos F1
2 3
1 2
3
3
F1
解:首先,求 F1 在 x,y,z 轴上的投影,即 F1y F1 sin sin F1
5.2.4 力对点之矩与力对轴之矩的关系
以矩心 O 为原点,取直角坐标系 Oxyz,如图所示。设力 F 在各坐标轴上的投影为 Fx,Fy,Fz;力作 用点 A 的坐标为(x,y,z),则有 F Fxi Fy j Fzk
空间任意力系的简化

空间平行力系的平衡方程,设各力线都 // z 轴。 因为 mz ( F ) 0 Z 0 X 0 m x ( F ) 0 Y 0 m y ( F ) 0
均成为了恒等式。
2、空间约束
观察物体在空间的六种(沿三轴移动和绕三轴转动)可能 的运动中,有哪几种运动被约束所阻碍,有阻碍就有约束反力。
1、空间任意力系的平衡充要条件是: R '0 F 0 MO mO ( Fi )0
又 R ' ( X ) 2 ( Y ) 2 ( Z ) 2
M O ( m x ( F )) 2 ( m y ( F )) 2 ( m z ( F )) 2ຫໍສະໝຸດ 所以空间任意力系的平衡方程为:
第五章 空间任意力系
§5-1 空间任意力系的简化
与平面任意力系的简化原理(力的平移定 理)相同,空间任意力系也可以简化为一个主 失和一个主矩。但是由于主矩和主失不在同一 平面,所以不能进一步简化为一个合力。 应当注意,主失仍然与简化中心无关;主矩
则与简化中心的选择有关。
§5-2 空间任意力系的平衡条件
X 0,m x ( F ) 0 Y 0,m y ( F ) 0 Z 0,m z ( F ) 0
还有四矩式,五矩式和六矩式, 同时各有一定限制条件。
空间汇交力系的平衡方程为:
X 0 Y 0 Z 0
因为各力线都汇交于一点,各轴都通过 该点,故各力矩方程都成为了恒等式。
阻碍移动为反力,阻碍转动为反力偶。[例]
1)球形铰链 (前面讲过)
球形铰链
2)向心轴承,滚珠(柱)轴承
绕x和z轴的转动 也同时被约束。
3)滑动轴承
4)止推轴承
第9页,加 两个绕轴 转动的约 束。
空间任意力系

mz(F)= - 62P/5; mz(F)= 62P/5; mz(F)= 0; mz(F)= 0;
x
5
y
P 4
3
p.4
理论力学
理论力学
力对轴之矩与力对点之矩的关系 z
F
MO
M
M
y
OX
M
X
(F )
O
OY
M Y (F )
r x
M
Oz
M z (F )
力对点之矩在通过该点的任一轴上的投影,等于该力对此轴的矩
1
A2
1 C
O 1
4
A3 x
A1 x 1 A 2 x 2 A 3 x 3 A1 A 2 A 3 A1 y 1 A 2 y 2 A 3 y 3
A1 A 2 A 3
2 2
2
0 . 25 cm
3
1 . 25 cm
负质量(负面积)法
A1 20 cm A 2 4 cm
p.17
理论力学
理论力学
例10.热轧不等边角钢的截面近似的简化如图所示,已知 B=12cm,b=8cm,d=1.2cm;求该截面重心的位置。
y d
解: (1) 将截面分成两个矩形,面积和 重心分别为:
C1 C C2 d
B
A1 1 . 2 12 14 . 4 cm , x 1 0 . 6 cm , y 1 6 cm
P V
v x V
v y PV
zc
v z V
均质薄板
xc
v A d
A x A
V Ad
yc
工程力学第四版电子课件gclx5
解:solution
Pz = P⋅sin45° Pxy = P⋅cos45° Px = − Pcos45°⋅sin60° Py = P⋅cos45°⋅cos60°
9
m z ( P ) = m z ( P x ) + m z ( P y ) + m z ( P z ) = 6× Px + ( −5× Py ) + 0 = 6 Pcos45°sin60° − 5Pcos45°cos60° = 38.2( N ⋅m)
∑X =0 Y ∑ =0 ∑Z =0
说明: 三个独立平衡方程, 说明:①空间汇交力系只有 三个独立平衡方程,只能求解 三个未 知量。 知量。 we can determine three unknown forces by using three independent equations.
15
∑X =0, ∑mx (F)=0 ∑Y =0, ∑my (F)=0 ∑Z=0, ∑mz (F)=0
12
2、解析法: 、解析法 由于 Fi = X ii + Y i j + Z i k 合力 由 ∴ 代入上式
R = ∑ X i i + ∑Y i j + ∑ Z i k
为合力在x轴的投影,
∑Xi
Rx = ∑ X i
R ymethod By using the theorem of resultant projection to determine the resultant force.
5
5-2 力对轴的矩
the moment of a force about an axis 一、力对轴的矩的概念与计算
the concepts and the calculation of the moment of a force about an axis
空间任意力系

Mo Mx (F)i M y (F) j Mz (F)k
式中,各分别表示各 Mx (F), M y (F), Mz (F)力
对 x,y,z ,轴的矩。
12
FRx —有效推进力
FRy —有效升力 FRz —侧向力
MOx —滚转力矩
力偶矩 M rBA F
Mo (F, F) Mo (F) Mo (F) rA F rB F
因 F F
Mo (F, F) (rA rB ) F M
5
(3)只要保持力偶矩不变,力偶可在其作用面内任意移转, 且可以同时改变力偶中力的大小与力偶臂的长短,对刚体的 作用效果不变.
1
方向余弦
cos(FR , i )
Fx FR
cos(FR ,
j)
Fy FR
cos(FR ,k Nhomakorabea)
Fz FR
空间汇交力系的合力等于各分力的矢量和,合力的作用线通过汇交点.
知识要点回顾
空间汇交力系的平衡条件
空间汇交力系平衡的充分必要条件是:
Fx 0 Fy 0
称为空间汇交力系的平衡方程.
=
=
=
M
(
F1 ,
F1)
rBA
F1
M (FR , FR) rBA FR rBA (F1 F2 )
rBA F1 rBA F2 rBA F1 M (F1, F1)
6
(4)只要保持力偶矩不变,力偶可从其所在平面移至另 一与此平面平行的任一平面,对刚体的作用效果不变.
工程力学_05空间力系

0, MO 0 时,空间力系为平衡力系。 当 FR
§5–1 空间任意力系向一点的简化· 主矢和主矩
空间任意力系向任一点简化可得到一个力和一个力偶。 这个力通过简化中心,称为力系的主矢,它等于各 个力的矢量和,并与简化中心的选择无关。 这个力偶的力偶矩矢称为力系对简化中心的主矩, 并等于力系中各力对简化中心之矩矢的矢量和,并 与简化中心的选择有关。
§5–1 空间任意力系向一点的简化· 主矢和主矩
§5–1 空间任意力系向一点的简化· 主矢和主矩
空间任意力系:作用线在空间任意分布的力系。
空间汇交力系
空间任意力系
空间力偶系
§5–1 空间任意力系向一点的简化· 主矢和主矩
空间任意力系:作用线在空间任意分布的力系。 一、空间任意力系向一点的简化
其中,各 Fi Fi ,
Fx 0, FAx Fx 0 (1) Fy 0, FAy Fy 0 (2) Fz 0, FAz Fz 0 (3) M x ( F ) 0, M y ( F ) 0, M z ( F ) 0,
FAz MAz
O
z
MAy FAx
FAy Fz
y 200 Fy
MAx
M Ax 0.075Fz 0 M Ay 0.2 Fz 0
x 75 Fx
M Az 0.075Fx 0.2 Fy 0
P 20 kN
§5–2 空间任意力系的平衡条件
解题步骤、技巧与注意问题: 1、解题步骤: ①选研究对象
O
11
§5–1 空间任意力系向一点的简化· 主矢和主矩
三、补充:空间任意力系的简化结果分析(最后结果)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
or
M x (F )0 : 3 AC 3 FC G 2 2 2 F C G 200 N ( )
AC 0 2
F F F
x
0 : F 0 : F 0 : F
Ax
y
Ay
3FC 1 0 2 2 3FC 3 0 2 2 FC G 0 2
9 3 kN 7.794 kN 2 (F )0 :
Az
M
F
Az
BC
1000 F
700 G 400( F 1 F 2 )sin 30 o 0
6 kN (F )0 : 400( F 1 F 2 ) cos 30 o 0
M
F
Ax
BD
1000 F
Ax
3 3 kN 5.196 kN
z
Az
F F F
3FC 50 3 kN 4 3F C 150 kN Ay 4 FC 100 kN Az G 2
Ax
(
)
() ()
8
西安建筑科技大学 理学院 力学系
理论力学题解
解:
5.9 如图所示六根杆支撑长方形水平板 ABCD 。 已知在水平板定点 D 处作
z O F1 O F3 O O O F2 O y O
F R F 1F 2 F F k
3
( F i )( F i )( F k )
x O
M O (F )r 1F 1 r 2 F 2 r 3F a F ja F k M O ( F ) F R a F ( j k ) F k 0
Az
20 3 ( 20 2 ) 68.990 kN
6
西安建筑科技大学 理学院 力学系
理论力学题解
解:
5.7 如图所示起重装置。电动机以转矩 M 通过皮带传动起升重物,皮带
与水平线成 30 º角,已知 r 10 cm , R 20 cm , G 10 kN ,皮带张紧边的拉力 是松弛边的两倍,即 F 1 2 F 2 。试求平衡状态时,轴承 A 、 B 处的约束反力及 皮带的拉力。
1.2 6 2 ( 2 l AC ) m l CD 3 3 l 2 l 0.8 3 m AK EK 3 3
AK
0.4 m ,l
AC
0.6 m 。试求绳索 CD 、KE 所
FCD B K C y
G
M M
x z
(F )0 (F )0
F F F M M M
x y y
0 0 0
: F 1 F x 0 : F 2 F y 0 : F z F R 0
x y z
(F )0 : M x 2F R 4F 2 0 (F )0 : 6F 1 M y 0 (F )0 : M z 4 F 1 0 ( ) ; () () M x 32 kN m M y 30 kN m M z 20 kN m ( ( ) ( ) )
4 kN 。试求固定端 O 处的约束反力。
z O
q FR O O
F1 O
F2 O 4m O FxM y O x O A O
Mz
4m O
6m O y O
Fy
O Mx Fz O
受力分析:如图所示。
建立如图所示标准直角坐标系 A x y z 。 将均布载荷等效成集中力 F R(合力矩定理): 平衡方程:
F R 2 4 8 kN
o G l ( F C D cos 60 ) l AC 0 o o o o ( F E K cos 30 ) ( l E K cos 60 ) ( F C D cos 30 cos 45 ) l
AC
0
F C D 960 N F E K 720 6 N
z B O O 3m O C O FA z
45 o 45 o
AG AH
5 3 m 3
M
AH
(F )0 :
3 5 2 F G AG 20 0 2 2 F G 20 2 kN 28.284 kN
G 2m O O FG H O FH
60 o
3m O
E O 2m O
20kN O D
60 o
x O
A FA y y O O FA x
45 o
M
AG
(F )0 :
3 5 2 F H AH 0 2 2 F H 20 2 kN 28.284 kN
F
F
x
0 : F 0 0 : F
Ax
F G cos 60 o cos 45 o F
H
cos 60 o cos 45 o 0
Ax
F
F
y
Ay
o sin 45 o 0
Ay
2 ( 20 2 ) 20 kN 2
Az
F
F
z
0 : F
20 F
H
cos 30 o F G cos 30 o 0
A O F Ax M ( F ) 0 : x O 1000 F B z 300 G 600( F 1 F 2 )sin 30 o 0
F
Bz
FA z O
R O O r O O G O x O
1.5 kN (F )0 :
Bx
M
F
Bx
z
1000 F
600( F 1 F 2 ) cos 30 o 0
AC G AC F 1 0 2 AD F 3 cos cos AD F 0 AC AC F 3 sin F 2 sin 0 2 2 ; ( 30 o )
E 2 B
F2
x
F C 1 F1
M M M
3
( a k )( F i ) ( a j )( F i ) ( o )( F k )
即力系简化的结果为:不为零矢量的主矢量和不为零矢量的主矩矢量。
2
西安建筑科技大学 理学院 力学系
理论力学题解
5.3 如图所示结构(各构件自重不计) 。长度为 l 0.8 m 的均质杆 AB 。 A
西安建筑科技大学 理学院 力学系
理论力学题解
解:
5.1 如图所示,已知集中力 F ,夹角 、 , 长方形边长 a 、 b 、 c 。试
求集中力 F 在 x 、 y 、 z 轴上的投影和力 F 对 x 、 y 、 z 轴的矩。
z
F θ A y a b
φ r c x O
建立如图所示标准直角坐标系 O x y 。 主矢量、主矩矢量计算:
| F | F F F cos sin i F cos cos j F sin k F x F cos sin F y F cos os F F sin ; y r a i b j c k ; a cos b sin M O ( F ) r F = ( a i b j c k ) ( F cos sin i F cos cos j F sin k ) = 0 i a F cos cos k a F sin j b F cos sin k 0 j b F sin i c F cos sin j c F cos cos i 0 k M x b F sin c F cos cos M y a F sin c F cos sin M 0 z
7
西安建筑科技大学 理学院 力学系
理论力学题解
解:
5.8 如图所示均质等厚矩形板。 矩形板重 G 200 N , 矩形板顶点 A 、B 处
分别由止推轴承和向心轴承支承,矩形板顶点 C 处用一绳 EC 维持矩形板处于水 平位置(E 点位于过 A 点的铅直线上) 。试求绳的张力及 A 、 B 两顶点处的两轴 承约束反力。
处由球形铰链支承, C 、 K 两处分别由绳索悬拉而使杆 AB 保持在水平面内; B 端悬挂重量 G 360 N 的重物。 若l 受拉力。 解: FCD D z 60 o FA z 45 o FA y A F oA x 60 FEK E x 受力分析:如图所示。 建立如图所示标准直角坐标系 A x y z 。
z
(F )0 (F )0
: :
y
AC
(F )0 :
F 1 50 N F 2 46.6667 N F 46.6667 N 3
4
西安建筑科技大学 理学院 力学系
理论力学题解
解:
5.5 如图所示悬臂刚架。悬臂刚架上作用有集度为 q 2 kN / m 的均布载
荷;作用线平行与 AB 和 CD 的集中力 F 1 和 F 2 ,其大小分别为 F 1 5 kN 、F 2
( (
) )
3
西安建筑科技大学 理学院 力学系
理论力学题解
5.4 如图所示均质矩形薄板重 G 100 N ,均质矩形薄板由球形铰支座 A
和 1、 2、 3 三根杆(各杆重量略去不计)支承而处在水平面内。 1 杆铅直(图中 AE 、 角度 30 o 。 若在 C 点作用水平向左的集中力 F BH 两虚线都是铅直线); ,其大小为 F 35 N 。试求 1、2、3 三根杆内力 F 1 、 F 2 、 F 3 之间比值。 解: y F3 3 A G α β γ D z 受力分析:如图所示。 建立如图所示标准直角坐标系 A x y z 。