信号与系统_奥本海姆_中文答案_chapter_9
英文版《信号与系统》第九章习题解答

2 H (s ) = s (s + 4 )
Re{s} > 0
The system is unstable.
15
Chapter 9 9.33 A causal LTI system H (s ) =
x(t ) = e
t
Problem Solution
s +1 s 2 + 2s + 2
, ∞ < t < +∞
Determine and sketch the response y (t )
2 X (s ) = 2 s 1
1 < Re{s} < 1 Re{s} > 1
2(s + 1) (s + 1)(s 1) s 2 + 2s + 2
s +1 H (s ) = 2 s + 2s + 2 Y (s ) = X (s )H (s ) =
2 2 4 y (t ) = + e t u ( t ) + e t (cos t )u (t ) + e t (sin t )u (t ) 5 5 5
17
Chapter 9
Problem Solution
9.35 Consider a causal LTI system with the input x(t ) and output y (t ) . (b) Is this system stable?
2
②
1
③
1
④
2
σ
① Re{s} < 2 anticausal , unstable ② -2 < Re{s} < 1 noncausal , unstable
信号与系统奥本海姆英文版课后答案chapter9

Chapter 9 Answers(a )The given integral may be written as(5)0t j t e e dt σω∞-+⎰If σ<-5 ,then the function (5)te σ-+ grows towards ∞ with increasing t and the given integral does not converge .but if >-5,then the integral does converge (b) The given integral may be written as0(5)t j tee d σω-+-∞⎰t If σ>-5 ,then the function (5)te σ-+ grows towards ∞as t decreases towards -∞and the given integral doesnot converge .but if σ<-5,then the integral does converge (c) The given integral may be written as5(5)5t j t e e d σω-+-⎰t Clearly this integral has a finite value for all finite values of σ. (d) The given integral may be written as(5)t j t e e d σω∞-+-∞⎰tIfσ>-5 ,then the function (5)t e σ-+ grows towards ∞as t decreases towards -∞and the given integraldoes not converge If σ<-5, ,then function (5)te σ-+ grows towards ∞ with increasing t and the given integral does not converge If σ=5, then the integral stilldoes not have a finite value. therefore, the integral does not converge for any value of σ. (e) The given integral may be written as0(5)t j tee d σω-+-∞⎰t+ (5)0t j t e e d σω∞-+⎰t The first integral converges for σ<-5, the second internal converges if σ>-5,therefore, the given internal converges whenσ<5.(f) The given integral may be written as0(5)t j t e e d σω-+-∞⎰tIf σ>5 ,then the function (5)te σ--+grows towards ∞ as t decrease towards -∞ and the given integral does not converge .but if σ<5,then the integral does converge. (a)X(s)= 5(1)t dt eu t e dt ∞---∞⎰- =(5)0s tedt ∞-+⎰ =(5)5s es -++As shown in Example the ROC will be {}Re s >-5. (b) By using eg., we can easily show that g(t)=A 5te-u(-t-0t ) has the Laplace transformG(s)= 0(5)5s t Ae s ++The ROC is specified as {}Re s <-5 . Therefore ,A=1 and 0t =-1Using an analysis similar to that used in Example we known that given signal has a Laplace transform of the formX(s)115s s β+++The corresponding ROC is {}Re s >max(-5,Re{β}). Since we are given that the ROC isRe{s}>-3, we know that Re{β}=3 . there are no constraints on the imaginary part of β. We know form Table that111()sin(2)()()()Lt x t e t u t X s X s -=-←−→=-, Re{s}>-1 We also know form Table thatx(t)= 1()Lx t -←−→X(s)= 1()X s -The ROC of X(s) is such that if 0s was in the ROC of 1()X s , then -0s will be in the ROC of X(s). Putting the two above equations together ,we havex(t)= 1x (-t) =sin(2)()t e t u t --L ←−→X(s)= 1()X s -=-222(1)2s -+, {}Re s <1the denominator of the form 2s -2s+5. Therefore, the poles of X(s) are 1+2j and 1-2j.(a) the given Laplace transform may be written as ()X s =24(1)(3)s s s +++.Clearly ,X(s) has a zero at s=-2 .since in X(s) the order of the denominator polynomial exceeds the order of the numerator polynomial by 1 ,X(s) has a zero at ∞. Therefore ,X(s) has one zero in finite s-plane and one zero at infinity.(b) The given Laplance transform may be written asX(s)=1(1)(1)s s s +-+= 11s -Clearly ,X(s) has no zero in the finite s-plane .Since in X(s) the of the denominator polynomial exceedsthe order the numerator polynomial by 1,X(s) has a zero at ∞.therefore X(s) has no zero in the finite s-plane and one zero at infinity.(c) The given Laplace transform may be written as22(1)(1)()1(1)s s s X s s s s -++==-++Clearly ,X (s )has a zero at s= in X(s) the order of the numerator polynomial exceeds the order of the denominator polynomial by 1,X(s) has zeros at ∞ .therefore , X(s) has one zero in the s-plane and no zero at infinity .(a) No. From property 3 in Section we know that for a finite-length signal .the ROC is the entire s-plane .therefore .there can be no poles in the finite s-plane for a finite length signal . Clearly in this problem this not the case.(b) Yes. Since the signal is absolutely integrable, The ROC must include, the j ω-axis . Furthermore ,X(s) has a pole at s=2 .therefore, one valid ROC for the signal would be Re{s}<2. From property 5 in section we know that this would correspond to a left-sided signal(C) No . Since the signal is absolutely integrable, The ROC must include , the j ω-axis . Furthermore ,X(s) has a pole at s=2. therefore ,we can never have an ROC of the form Re{s}> α. From property 5 in section we knew that x(t) can not be a right-side signal(d) Yes . Since the signal is absolutely integrable, The ROC must include , the j ω-axis . Furthermore ,X(s) has a pole at s=2 .therefore, one valid ROC for the signal could be α<Re{s}<2 such that α<0 .From property 6 in section ,we know that this would correspond to a two side signalWe may find different signal with the given Laplace transform by choosing different regions of 02s =- 13s =- 2132s j =- 3132s j =-Based on the locations of the locations of these poles , we my choose form the following regions of convergence: (i) Re{s}>- 12(ii)-2< Re{s}<- 12(iii)-3<Re{s}<-2 (iv)Re{s}<-3Therefore ,we may find four different signals the given Laplace transform. From Table ,we know thatG(t)= 2()()(2)L te x t G s X s ←−→=-. The ROC of G(s) is the ROC of X(s) shifted to the right by 2We are also given that X(s) has exactly 2 poles at s=-1 and s=-3. since G(s)=X(s-2), G(s)also has exactly two poles ,located at s=-1+2=1 and s=-3+2=-1 since we are given G(j ω) exists , we may infer that j ω-axis lies in the ROC of G(s). Given this fact and the locations of the poles ,we may conclude that g(t) is a two sidesequence .Obviously x(t)= 2te g(t) will also be two sidedUsing partial fraction expansion X(s)= 4243s s -++Taking the inverse Laplace transform, X(t)=443()2()t t e u t e u t ---The pole-zero plots for each of the three Laplace transforms is as shown in Figure(a) form Section we knew that the magnitude of the Fourier transform may be expressed aswe se that the right-hand side of the above expression is maximum for ω=0 and decreases as ω becomesincreasing more positive or more negative . Therefore 1()H j ω is approximately lowpass (b) From Section we know that the magnitude of the Fourier transform may be express as 1313(length of vector from to -+j )(Length of vector from to --j )ωωwe see that the right-hand side of the above expression is zero for ω= then increams withincreasing |ω| until |ω| reach 1/2. Then it starts decreasing as |ω| increase even further. Therefore | 2H (j )ω| is approximately bandpass.(c) From Section we know that the magnitude of the Fourier transform may be express as21313(length of vector from to -+j )(Length of vector from to --j ) ωωWe see that the right-hand side of the above expression is zero for ω=0. It then increases withincreasing |ω| until |ω| reaches 21. Then |ω| increases,| 3()H j ω| decreases towards a value of1(because all the vector lengths became almost identical and the ratio become 1) .Therefore |3()H j ω| is approximately highpass.X(s) has poles at s=13-213-2(s) has zeros at s=132and 132.From Section we know that |X(j ω)| is1313(Length of vector from toto 22221313(length of vector from to -+j )(Length of vector from to --j )ωωωωThe terms in the numerator and denominator of the right-band side of above expression cancel ourgiving us |X(j ω)|=1.(a) If X(s) has only one pole, then x(t) would be of the form ate - such a signal violates condition 2. Therefore , this statement is inconsistent with the given information.(b) If X(s) has only two poles, then x(t) would be of the form A 0sin()ate t ω- .Clearly such a signal could be made to satisfy all three conditions(Example:0ω=80π,α=19200). Therefore, this statement is consistent with the given information. (c) If X(s) has more than two poles (say 4 poles), then x(t) could be assumed to be of theform 00sin()sin()at btAe t Be t ωω--+. Clearly such a signal could still be made to satisfy all three conditions. Therefore, this statement is consistent with the given information. We have1}Re{,1)(->+=s s s X β.Also,(Length of vector form ω to -1)(Length of vector form ω to 1 I m-1 -3 Re -4 Re 1 Im Im Re1}Re{1),()()(<<--+=s s X s X s G αTherefore, ].11[)(2s s s s G -++-=ααβComparing with the given equation for G(s), ,1-=α .21=β. Since X(s) has 4 poles and no zero in the finite s-plane, we many assume that X(s) is of the form .))()()(()(d s c s b s a s As X ----=Since x(t) is real ,the poles of X(s) must occur in conjugate reciprocal pairs. Therefore, we mayassume that b=*a and d=*c . This result in .))()()(()(**c s c s a s a s As X ----=Since the signal x (t) is also even , the Laplace transform X(s) must also be even . This implies thatthe poles have to be symmetric about the j ω-axis. Therefore, we may assume that c=*a -. This results in .))()()(()(**a S a s a s a s As X ++--=We are given that the location of one of the poles is (1/2)4πj e . If we assume that this pole is a, we have 4444AX(s)=.1111(s-)(s-)(s+)(s+)2222j j j j e e e e ππππ-- This gives us22().11()()4422AX s s s s s =Also ,we are give that()(0)4x t dt X ∞-∞==⎰Substituting in the above expression for X(s), we have A=1/4. Therefore, 221/4().11()()4422X s s s s s =. Taking the Laplace transform of both sides of the two differential equations, we haves X(s)=1)(2+-s Y and s Y(s)=2X(s) . Solving for X(s) and Y(s), we obtain4)(2+=s s s X and Y(s)= 22s 4+.The region of convergence for both X(s) and Y(s) is Re{s}>0 because both are right-hand signals. . Taking the Laplace transform of both sides of the given differential equations ,we obtain ).(])1()1()[(223s X s s s s Y =+++++αααα therefore,.)1()1(1)()()(223αααα+++++==s s s s X s Y s H(a) Taking the Laplace transform of both sides of the given equation, we haveG(s) = s H(s)+ H(s). Substituting for H(s) from above,.1)1()1()1()(22223αααααα++=++++++=s s s s s s s GTherefore, G(s) has 2 poles.(b) we know that H(s) =.))(1(122αα+++s s s Therefore, H(s) has poles at and j ),2321(,1+--α ).2321(j --α If the system has to be stable,then the real part of the poles has to be less than zero. For this to be true, we require that ,02/<-α .,0>α.The overall system show in Figure may be treated as two feedback system of the form shown in figure connected in parallel. By carrying out an analysis similar to that described in Section we find the system function of the upper feedback system to be.82)/2(41/2)(1+=+=s s s s HSimilarly, the system function of the lower feedback system is .21)2/1(21/1)(2+=+=s s s HThe system function of the overall system is now.1610123)()()(221+++=+=s s s s H s H s HSince H(s)=Y(s)/X(s), we may write]123)[(]1610)[(2+=++s s X s s s Y . Taking the inverse Laplace transform, we obtaindtt dx t x t y dt t dy dt t y d )(3)(12)(16)(10)(2+=++. ( a) From problem , we know that differential equation relating the input and output of the RLC circuit is2()()()().d y t dy t y t x t dtdt++=Taking the Laplace transform of this (while nothing that the system is causal and stable), we obtain 2()[1]().Y s s s X s ++= Therefore ,2()1(),()1Y s H s X s s s ==++ 1{}.2e s ℜ>-(b) We note that H(s) has two poles at132s =--132s =-+From Section we know that the magnitude of the Fourier transform may be expressed as1313(Length of vector from to -+j )(Length of vector from to --j )ωω We see that the right hand side of the above expression Increases with increasing |ω| until |ω| reaches 12. Then it starts decreasing as |ω| increasing even further. It finally reaches 0 for |ω|=∞.Therefore 2|()|H j ω is approximately lowpass.(c) By repeating the analysis carried out in Problem and part (a) of this problem with R =310-Ω, wecan show that2()1(),()1Y s H s X s s s ==++ {}0.0005.e s ℜ>-(d) We have33(Vect.Len.from to -0.0005+j )(Vect.Len.from to -0.0005-j )ωωWe see that when |ω| is in he vicinity , the right-hand side of the above equation takes onextremely large value. On either side of this value of |ω| the value of |H (j ω)| rolls off rapidly. Therefore, H(s) may be considered to be approximately bandpass. . (a) The unilateral Laplace transform isX(s) = 20(1)t st e u t e dt -∞--+⎰= 20t st e e dt -∞--⎰=21+s {} 2.e s ℜ>-(b) The unilateral Laplace transform is2(3)0()[(1)()(1)]t st X s t t e u t e dt δδ-∞-+-=++++⎰2(3)0[()]t st t e e dt δ-∞-+-=+⎰612e s -=++ {} 2.e s ℜ>- (c) The unilateral Laplace transform is240()[()()]t t st X s e u t e u t e dt -∞---=⎰240[]t t st e e e dt -∞---=+⎰1124s s =+++ {} 2.e s ℜ>-. In Problem , we know that the input of the RL circuit are related by ).()()(t x t y dtt dy =+Applying the unilateral Laplace transform to this equation, we have ).()()0()(s x s y y s sy =+--(a) For the zero-state response, set (0)0y -=.Also we have u s x =)(L{)(2t u et-}=21+s .Therefore,y(s)(s+1)=.21+sComputing the partial fraction expansion of the right-hand side of the above equation and then taking its inverse unilateral Laplace transform, we have ).()()(2t u e t u e t y t t ---=(b) For the zero-state response, assume that x(t) = we are given that (0)1y -=,.11)(0)(1)(+=⇒=+-s s y s y s sy Taking the inverse unilateral Laplace transform, we have ()().t y t e u t -=Figure2()2()().t t y t e u t e u t --=- . The pole zero plots for all the subparts are shown in figure . (a) The Laplace transform of x(t) isX(s)= 230()t t st e e e dt ∞---+⎰= (2)(3)00[/(2)]|[/(3)]|s t s te s e s -+∞-+∞-++-+ =211252356s s s s s ++=++++(b) Using an approach similar to that show in part (a), we have41(),4L t e u t s -←−→+ {} 4.e s ℜ>-Also,551(),55L t j t e e u t s j -←−→+-and(){}551,555LT t j t e e u t e s s j --←−→ℜ>-++.From this we obtain()()()()55555215sin 52525LTt t j t t j t e t u t e e e e u t js ----⎡⎤=-←−→⎣⎦++ ,where {}5e s ℜ>- .Therefore,()()(){}245321570sin 5,51490100LTt t s s e u t e t u t e s s s s --+++←−→ℜ>-+++. -2 -3Im R a -2 R Im e Im R f Im Rg Im R h-2 2 4 -4 ImRd R b Im c R Im(c)The Laplace transform of ()x t is ()()023t t st X s e e e dt --∞=+⎰()()()()2300/2|/3|s t s t e s e s ----∞-∞⎡⎤⎡⎤=--+--⎣⎦⎣⎦ 211252356s s s s s -=+=---+.The region of convergence (ROC) is {}2e s ℜ<.(d)Using an approach along the lines of part (a),we obtain(){}21,22LT t e u t e s s -←−→ℜ>-+. Using an approach along the lines of part (c) ,we obtain(){}21,22LT t e u t e s s -←−→ℜ<-.From these we obtain()()222224t LT t t s e e u t e u t s --=+-←−→-, {}22e s -<ℜ<. Using the differentiation in the s-domain property , we obtain(){}22222228,2244t LT d s s te e s ds s s -+⎡⎤←−→-=--<ℜ<⎢⎥-⎣⎦-. (e)Using the differentiation in the s-domain property on eq.,we get()(){}2211,222LT t d te u t e s ds s s -⎡⎤←−→-=ℜ>-⎢⎥+⎣⎦+.Using the differentiation in the s-domain property on eq ,we get ()(){}2211,222LT t d te u t e s ds s s ⎡⎤--←−→=-ℜ<⎢⎥-⎣⎦-.Therefore,()()()(){}222224,2222t LT t t st e te u t te u t e s s s ---=--←−→-<ℜ<+-.(f)From the previous part ,we have ()()(){}2221,22LT t t t e u t te u t e s s -=--←−→-ℜ<-.(g)Note that the given signal may be written as ()()()1x t u t u t =-- .Note that (){}1,0LTu t e s s←−→ℜ>.Using the time shifting property ,we get(){}1,0s LT e u t e s s--←−→ℜ>.Therefore ,()1x t()()11,sLT e u t u t s----←−→ All s . Note that in this case ,since the signal is finite duration ,the ROC is the entire s-plane.(h)Consider the ()()()11x t t u t u t =--⎡⎤⎣⎦that the signal ()x t may beexpressed as ()()()112x t x t x t =+-+ . We have from the previous part()()11sLT e u t u t s----←−→, All s . Using the differentiation in s-domain property ,we have()()()12111s s s LT d e se e x t t u t u t ds ss ---⎡⎤--+=--←−→=⎡⎤⎢⎥⎣⎦⎣⎦, All s . Using the time-scaling property ,we obtain()121s s LT se e x t s --+-←−→, All s .Then ,using the shift property ,we have()21212s sLT s se e x t es ---+-+←−→ ,All s . Therefore ,()()()21122112s s s sLT s se e se e x t x t x t e s s----+--+=+-+←−→+, All s. (i) The Laplace transform of ()()()x t t u t δ=+ is (){}11/,0X s s e s =+ℜ>.(j) Note that ()()()()33t u t t u t δδ+=+.Therefore ,the Laplace transform is the same as the result of the previous part. (a)From Table ,we have()()()1sin 33x t t u t =.(b)From Table we know that()(){}2cos 3,09LT st u t e s s ←−→ℜ>+. Using the time scaling property ,we obtain()(){}2cos 3,09LT s t u t e s s -←−→-ℜ<+Therefore ,the inverse Laplace transform of ()X s is()()()cos 3x t t u t =--.(c)From Table we know that ()()(){}21cos 3,119LTt s e t u t e s s -←−→ℜ>-+.Using the time scaling property ,we obtain ()()(){}21cos 3,119LTt s e t u t e s s -+-←−→-ℜ<-++. Therefore ,the inverse Laplace transform of ()X s is()()()cos 3t x t e t u t -=--.(d)Using partial fraction expansion on ()X s ,we obtain ()2143X s s s =-++ .From the given ROC ,we know that ()x t must be a two-sided signal .Therefore ()()()432t t x t e u t e u t --=+-.(e)Using partial fraction expansion on ()X s ,we obtain()2132X s s s =-++. From the given ROC ,we know that ()x t must be a two-sided signal ,Therefore,()()()332ttx t e u t e u t --=+-.(f)We may rewrite ()X s as ()2311s X s s s =+-+()()2211/23/2s =-+()()()()222211/23/21/23/2s s =+-+-+Using Table ,we obtain()())())()/2/23cos 3/23sin3/2t t x t t e t u t e t u t δ--=+.(g)We may rewrite ()X s as ()()2311s X s s =-+.From Table ,we know that(){}21,0LT tu t e s s ←−→ℜ>.Using the shifting property ,we obtain()(){}21,11LT t e tu t e s s -←−→ℜ>-+.Using the differentiation property ,()()()(){}2,11LT t t t d s e tu t e u t te u t e s dt s ---⎡⎤=-←−→ℜ>-⎣⎦+. Therefore,()()()()33t t x t t e u t te u t δ--=--.four pole-zero plots shown may have the following possible ROCs:·Plot (a): {}2e s ℜ<- or {}22e s -<ℜ< or {}2e s ℜ>.·Plot (b): {}2e s ℜ<- or {}2e s ℜ>-. ·Plot (c): {}2e s ℜ< or {}2e s ℜ>. ·Plot (d): Entire s-plane.Also, suppose that the signal ()x t has a Laplace transform ()X s with ROC R . (1).We know from Table that()()33LT te x t X s -←−→+.The ROC 1R of this new Laplace transform is R shifted by 3 to the left .If ()3t x t e - is absolutely integrable, then 1R must include the jw -axis.·For plot (a), this is possible only if R was {}2e s ℜ> . ·For plot (b), this is possible only if R was {}2e s ℜ>-. ·For plot (c), this is possible only if R was {}2e s ℜ> . ·For plot (d),R is the entire s-plane. (2)We know from Table that(){}1,11LT t e u t e s s -←−→ℜ>-+.Also ,from Table we obtain()()(){}2,11LT t X s x t e u t R R e s s -⎡⎤*←−→=ℜ>-⎡⎤⎣⎦⎣⎦+ If ()()te u t x t -*is absolutely integrable, then 2R must include the jw -axis.·For plot (a), this is possible only if R was {}22e s -<ℜ<. ·For plot (b), this is possible only if R was {}2e s ℜ>-. ·For plot (c), this is possible only if R was {}2e s ℜ< . ·For plot (d),R is the entire s-plane.(3)If ()0x t = for 1t > ,then the signal is a left-sided signal or a finite-duration signal . ·For plot (a), this is possible only if R was {}2e s ℜ<-. ·For plot (b), this is possible only if R was {}2e s ℜ<-. ·For plot (c), this is possible only if R was {}2e s ℜ< . ·For plot (d),R is the entire s-plane.(4)If ()0x t =for 1t <-,then the signal is a right-sided signal or a finite-duration signal ·For plot (a), this is possible only if R was {}2e s ℜ>.·For plot (b), this is possible only if R was {}2e s ℜ>- . ·For plot (c), this is possible only if R was {}2e s ℜ>.·For plot (d),R is the entire s-plane..(a)The pole-zero diagram with the appropriate markings is shown Figure .(b)By inspecting the pole-zero diagram of part (a), it is clear that the pole-zero diagram shown in Figure will also result in the same ()X jw .This would correspond to the Laplace transform()112X s s =-, {}12e s ℜ<.(c)≮()X jw π=-≮()1X jw .(d)()2X s with the pole-zero diagram shown below in Figure would have the property that ≮()2X jw =≮()X jw .Here ,()211/2X s s -=-. (e) ()()21/X jw X jw =.(f)From the result of part (b),it is clear that ()1X s may be obtained by reflecting the poles and zeros in the right-half of the s-plane to the left-half of the s-plane .Therefore, ()11/22s X s s +=+.From part (d),it is clear that ()2X s may be obtained by reflecting the poles (zeros) in the right-half of the s-plane to the left-half and simultaneously changing them to zeros (poles).Therefore,()()()()2211/22s X s s s +=++plots are as shown in Figure . Table we have()()(){}2111,22LT t x t e u t X s e s s -=←−→=ℜ>-+and()()(){}3111,33LTt x t e u t X s e s s -=←−→=ℜ>-+.Using the time-shifting time-scaling properties from Table ,we obtain()(){}22112,22s LT s e x t e X s e s s ---←−→=ℜ>-+and()(){}33223,33s LT s e x t e X s e s s---+←−→-=ℜ>--.Therefore, using the convolution property we obtain ()()()()23122323s s LTe e y t x t x t Y s s s --⎡⎤⎡⎤=-*-+←−→=⎢⎥⎢⎥+-⎣⎦⎣⎦. clues 1 and 2,we know that ()X s is of the form()()()AX s s a s b =++. Furthermore , we are given that one of the poles of ()X s is 1j -+.Since ()x t is real, the poles of ()X s must occur in conjugate reciprocal pairs .Therefore, 1a j =-and 1b j =+and ()()()11AH s s j s j =+-++. From clue 5,we know that ()08X =.Therefore, we may deduce that 16A = and ()21622H s s s =++ .Let R denote the ROC of ()X s .From the pole locations we know that there are two possible choices of R .R may either be {}1e s ℜ<-or {}1e s ℜ>-.We will now useclue 4 to pick one .Note that()()()()22LTt y t e x t Y s X s =←−→=-.The ROC of ()Y s is R shifted by 2 to the right .Since it is given that ()y t is not absolutely integrable ,the ROC of ()Y s should not include the jw axis -.This is possible only ofR is {}1e s ℜ>-..(a) The possible ROCs are(i) {}2e s ℜ<-.(ii) {}21e s -<ℜ<-. (iii) {}11e s -<ℜ<.( iv) {}1e s ℜ>.(b)(i)Unstable and anticausal. (ii) Unstable and non causal. (iii )Stable and non causal. (iv) Unstable and causal. .(a)Using Table ,we obtain(){}1,11X s e s s =ℜ>-+and(){}1, 2.2H s e s s =ℜ>-+(b) Since ()()()y t x t h t =*,we may use the convolution property to obtain()()()()()112Y s X s H s s s ==++.The ROC of ()Y s is {}1e s ℜ>-.(c) Performing partial fraction expansion on ()Y s ,we obtain . ()1112Y s s s =-++.Taking the inverse Laplace transform, we get()()()2t t y t e u t e u t --=-. (d)Explicit convolution of ()x t and ()h t gives us()()()y t h x t d τττ∞-∞=-⎰()()20t e e u t d ττττ∞---=-⎰t t e e d ττ--=⎰ for0t >()2.t t e e u t --⎡⎤=-⎣⎦ the input ()()x t u t =, the Laplace transform is (){}1,0.X s e s s=ℜ>The corresponding output ()()1t t y t e te u t --⎡⎤=--⎣⎦ has the Laplace transform()()(){}221111,0111Y s e s s s s s s =--=ℜ>+++. Therefore,()()()(){}21,0.1Y s H s e s X s s ==ℜ>+ Now ,the output ()()3123t t y t e e u t --⎡⎤=-+⎣⎦has the Laplace transform()()(){}12316,0.1313Y s e s s s s s s s =-+=ℜ>++++ Therefore , the Laplace transform of the corresponding input will be()()()()(){}1161,0.3Y s s X s e s H s s s +==ℜ>+ Taking the inverse Laplace transform of the partial fraction expansion of ()1,X s we obtain ()()()3124.t x t u t e u t -=+.(a).Taking the Laplace transform of both sides of the given differential equation and simplifying, we obtain ()()()212Y s H s X s s s ==--. The pole-zero plot for ()H s is as shown in figure .b).The partial fraction expansion of ()H s is()1/31/321H s s s =--+. (i).If the system is stable ,the ROC for ()H s has to be {}12e s -<ℜ< . Therefore ()()()21133t t h t e u t e u t -=---.(ii).If the system is causal, the ROC for ()H s has to be {}2e s ℜ> .Therefore()()()21133t t h t e u t e u t -=-.(iii)If the system is neither stable nor causal ,the ROC for ()H s has to be {}1e s ℜ<-.Therefore ,()()()21133t t h t e u t e u t -=--+-. If ()2t x t e =produces ()()21/6t y t e =,then ()()21/6H =. Also, by taking the Laplace transform of both sides ofthe given differential equation we get ()()()()442s b s H s s s s ++=++.Since ()21/6H = ,we may deduce that 1b = .Therefore()()()()()222424s H s s s s s s +==+++. ()()()t t t x t e e u t e u t --==+-,()()(){}112,111111X s e s s s s s -=-=-<ℜ<+-+-. We are also given that ()2122s H s s s +=++.Since the poles of ()H s are at 1j -±, and since ()h t is causal ,we may conclude that the ROC of()H s is {}1e s ℜ>-.Now()()()()()22221Y s H s X s s s s -==++-. The ROC of ()Y s will be the intersection of the ROCs of ()X s and ()H s .This is {}11e s -<ℜ<. We may obtain the following partial fraction expansion for ()Y s :()22/52/56/5122s Y s s s s +=-+-++. We may rewrite this as ()()()222/521411551111s Y s s s s ⎡⎤⎡⎤+=-++⎢⎥⎢⎥-++++⎢⎥⎢⎥⎣⎦⎣⎦.0 -1 2 ReImFigureNothing that the ROC of ()Y s is {}11e s -<ℜ<and using ,we obtain ()()()()224cos sin 555t t t y t e u t e tu t e tu t --=-++know that()()(){}111,0LTx t u t X s e s s=←−→=ℜ> Therefore,()1X s has a pole at0s =.Now ,the Laplace transform of the output()1y t of the system with()1x t as the input is()()()11Y s H s X s =Since in clue 2, ()1Y s is given to be absolutely integrable ,()H s must have a zero at 0s =whichcancels out the pole of ()1X s at 0s =.We also know that()()(){}2221,0LT x t tu t X s e s s=←−→=ℜ> Therefore , ()2x s has two poles at 0s =.Now ,the Laplace transform of the output ()2y t of the system with ()2x t as the input is()()()22Y s H s X s =Since in clue 3, ()2Y s is given to be not absolutely integrable ,()H s does not have two zeros at0s =.Therefore ,we conclude that ()H s has exactly one zero at 0s =. From clue 4 we know that the signal ()()()()2222d h t dh t p t h t dt dt=++is finite duration .Taking the Laplace transform of both sides of the above equation ,we get ()()()()222P s s H s sH s H s =++. Therefore,()()222P s H s s s =++.Since ()p t is of finite duration, we know that ()P s will have no poles in the finite s-plane .Therefore, ()H s is of the form()()1222Ni i A s z H s s s =-=++∏,where i z ,1,2,....,i N =represent the zeros of ()P s .Here ,A is some constant.From clue 5 we know that the denominator polynomial of ()H s has to have a degree which is exactly one greater than the degree of the numerator polynomial .Therefore, ()()1222A s s H s s s -=++.Since we already know that ()H s has a zero at 0s = ,we may rewrite this as ()222As H s s s =++ From clue 1 we know that ()1H 0.2 this ,we may easily show that 1A = .Therefore,()222s H s s s =++. Since the poles of ()H s are at 1j -± and since ()h t is causal and stable ,the ROC of ()H s is {}1e s ℜ>-..(a) We may redraw the given block diagram as shown in Figure . From the figure ,it is clear that()()1F s Y s s=. Therefore, ()()1/f t dy t dt =. Similarly, ()()/e t df t dt =.Therefore, ()()221/e t d y t dt =.From the block diagram it is clear that()()()()()()()21111266d y t dy t y t e t f t y t y t dtdt=--=--.。
《信号与系统》奥本海姆第九章

拉普拉斯正变换:
X s
x t e s t d t
0
x t e
s t
dt
0
x t e s t d t
单边LT 双边LT t x ( t ) e 的傅里叶变换。 说明: x(t ) 的拉氏变换就是 Im [s] 拉普拉斯反变换: S 平面
收敛域计算方法(Methods to find ROC):
x(t) X s x t e dt,
LT
s t
收敛域
Re[ s] R 的取值范围
x (t )
lim x(t )e
t
t
t
0 1
2
…
…
t
lim x (t ) e t 0
2013/5/20
6
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
9.1 Laplace Transform (LT)
2013/5/20
7
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
拉普拉斯变换在过程控制系统分析中的应用武汉理工大学学报信息与管理工程版20066胡亚才基于导热传递函数的球壳体动态导热特性研究20063浙江大学学报工学版拉普拉斯变换在自动控制领域中的应用江汉大学学报自然科学版
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
信号与系统奥本海姆习题答案

Chapter 1 Answers1.6 (a).NoBecause when t<0, )(1t x =0.(b).NoBecause only if n=0, ][2n x has valuable.(c).Yes Because ∑∞-∞=--+--+=+k k m n k m n m n x ]}414[]44[{]4[δδ ∑∞-∞=------=k m k n m k n )]}(41[)](4[{δδ ∑∞-∞=----=k k n k n ]}41[]4[{δδ N=4.1.9 (a). T=π/5Because 0w =10, T=2π/10=π/5.(b). Not periodic.Because jt t e e t x --=)(2, while t e -is not periodic, )(2t x is not periodic.(c). N=2Because 0w =7π, N=(2π/0w )*m, and m=7.(d). N=10Because n j j e e n x )5/3(10/343)(ππ=, that is 0w =3π/5, N=(2π/0w )*m, and m=3.(e). Not periodic. Because 0w =3/5, N=(2π/0w )*m=10πm/3 , it ’s not a rational number.1.14 A1=3, t1=0, A2=-3, t2=1 or -1dtt dx )( isSolution: x(t) isBecause ∑∞-∞=-=k k t t g )2()(δ, dt t dx )(=3g(t)-3g(t-1) or dtt dx )(=3g(t)-3g(t+1) 1.15. (a). y[n]=2x[n-2]+5x[n-3]+2x[n-4]Solution:]3[21]2[][222-+-=n x n x n y ]3[21]2[11-+-=n y n y ]}4[4]3[2{21]}3[4]2[2{1111-+-+-+-=n x n x n x n x ]4[2]3[5]2[2111-+-+-=n x n x n xThen, ]4[2]3[5]2[2][-+-+-=n x n x n x n y(b).No. For it ’s linearity.the relationship between ][1n y and ][2n x is the same in-out relationship with (a). you can have a try.1.16. (a). No.For example, when n=0, y[0]=x[0]x[-2]. So the system is memory. (b). y[n]=0.When the input is ][n A δ,then, ]2[][][2-=n n A n y δδ, so y[n]=0. (c). No.For example, when x[n]=0, y[n]=0; when x[n]=][n A δ, y[n]=0. So the system is not invertible.1.17. (a). No.For example, )0()(x y =-π. So it ’s not causal.(b). Yes.Because : ))(sin()(11t x t y = , ))(sin()(22t x t y =))(sin())(sin()()(2121t bx t ax t by t ay +=+1.21. Solution:We have known:(a).(b).(c).(d).1.22. Solution:We have known:(a).(b).(e).(g)1.23. Solution:For )]()([21)}({t x t x t x E v -+= )]()([21)}({t x t x t x O d --= then,(a).(b).(c).1.24.For: ])[][(21]}[{n x n x n x E v -+= ])[][(21]}[{n x n x n x O d --=then,(a).(b).1.25. (a). Periodic. T=π/2.Solution: T=2π/4=π/2.(b). Periodic. T=2.Solution: T=2π/π=2.(d). Periodic. T=0.5. Solution: )}()4{cos()(t u t E t x v π=)}())(4cos()()4{cos(21t u t t u t --+=ππ )}()(){4cos(21t u t u t -+=π )4cos(21t π= So, T=2π/4π=0.51.26. (a). Periodic. N=7Solution: N=m *7/62ππ=7, m=3.(b). Aperriodic.Solution: N=ππm m 16*8/12=, it ’s not rational number.(e). Periodic. N=16 Solution as follow:)62cos(2)8sin()4cos(2][ππππ+-+=n n n n x in this equation,)4cos(2n π, it ’s period is N=2π*m/(π/4)=8, m=1.)8sin(n π, it ’s period is N=2π*m/(π/8)=16, m=1.)62cos(2ππ+-n , it ’s period is N=2π*m/(π/2)=4, m=1. So, the fundamental period of ][n x is N=(8,16,4)=16.1.31. SolutionBecause )()1()(),2()()(113112t x t x t x t x t x t x ++=--=. According to LTI property ,)()1()(),2()()(113112t y t y t y t y t y t y ++=--=Extra problems:Sketch ⎰∞-=t dt t x t y )()(. 1. SupposeSolution:2. SupposeSketch:(1). )]1(2)1()3()[(--+++t t t t g δδδ(2). ∑∞-∞=-k k t t g )2()(δ(2).Chapter 22.1 Solution:Because x[n]=(1 2 0 –1)0, h[n]=(2 0 2)1-, then(a).So, ]4[2]2[2]1[2][4]1[2][1---+-+++=n n n n n n y δδδδδ (b). according to the property of convolutioin:]2[][12+=n y n y(c). ]2[][13+=n y n y][*][][n h n x n y =][][k n h k x k -=∑∞-∞= ∑∞-∞=-+--=k k k n u k u ]2[]2[)21(2 ][211)21()21(][)21(12)2(0222n u n u n n k k --==+-++=-∑ ][])21(1[21n u n +-= the figure of the y[n] is:2.5 Solution:We have known: ⎩⎨⎧≤≤=elsewhere n n x ....090....1][,,, ⎩⎨⎧≤≤=elsewhere N n n h ....00....1][,,,(9≤N ) Then, ]10[][][--=n u n u n x , ]1[][][---=N n u n u n h∑∞-∞=-==k k n u k h n h n x n y ][][][*][][ ∑∞-∞=-------=k k n u k n u N k u k u ])10[][])(1[][(So, y[4] ∑∞-∞=-------=k k u k u N k u k u ])6[]4[])(1[][( ⎪⎪⎩⎪⎪⎨⎧≥≤=∑∑==4,...14, (140)0N N k Nk =5, then 4≥N And y[14] ∑∞-∞=------=k k u k u N k u k u ])4[]14[])(1[][(⎪⎪⎩⎪⎪⎨⎧≥≤=∑∑==14,...114, (1145)5N N k Nk =0, then 5<N ∴4=N2.7 Solution:[][][2]k y n x k g n k ∞=-∞=-∑(a )[][1]x n n δ=-,[][][2][1][2][2]k k y n x k g n k k g n k g n δ∞∞=-∞=-∞=-=--=-∑∑(b) [][2]x n n δ=-,[][][2][2][2][4]k k y n x k g n k k g n k g n δ∞∞=-∞=-∞=-=--=-∑∑ (c) S is not LTI system..(d) [][]x n u n =,0[][][2][][2][2]k k k y n x k g n k u k g n k g n k ∞∞∞=-∞=-∞==-=-=-∑∑∑2.8 Solution: )]1(2)2([*)()(*)()(+++==t t t x t h t x t y δδ )1(2)2(+++=t x t xThen,That is, ⎪⎪⎪⎩⎪⎪⎪⎨⎧≤<-≤<-+-=-<<-+=others t t t t t t t t y ,........010,....2201,.....41..,.........412,.....3)(2.10 Solution:(a). We know:Then,)()()(αδδ--='t t t h)]()([*)()(*)()(αδδ--='='t t t x t h t x t y )()(α--=t x t xthat is,So, ⎪⎪⎩⎪⎪⎨⎧+≤≤-+≤≤≤≤=others t t t t t t y ,.....011,.....11,....0,.....)(ααααα(b). From the figure of )(t y ', only if 1=α, )(t y ' would contain merely therediscontinuities.2.11 Solution:(a). )(*)]5()3([)(*)()(3t u et u t u t h t x t y t----==⎰⎰∞∞---∞∞--------=ττττττττd t u e u d t u eu t t )()5()()3()(3)(3⎰⎰-------=tt t t d e t u d et u 5)(33)(3)5()3(ττττ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧≥+-=-<≤-=<=---------⎰⎰⎰5,.......353,.....313.........,.........0315395)(33)(3393)(3t e e d e d e t e d e t tt t t t t t t t ττττττ(b). )(*)]5()3([)(*)/)(()(3t u e t t t h dt t dx t g t ----==δδ)5()3()5(3)3(3---=----t u e t u e t t(c). It ’s obvious that dt t dy t g /)()(=.2.12 Solution∑∑∞-∞=-∞-∞=--=-=k tk tk t t u ek t t u e t y )]3(*)([)3(*)()(δδ∑∞-∞=---=k k t k t u e)3()3(Considering for 30<≤t ,we can obtain33311])3([)(---∞=-∞-∞=--==-=∑∑ee e ek t u e e t y tk k tk kt. (Because k must be negetive ,1)3(=-k t u for 30<≤t ).2.19 Solution:(a). We have known:][]1[21][n x n w n w +-=(1) ][]1[][n w n y n y βα+-=(2)from (1), 21)(1-=E EE Hfrom (2), αβ-=E EE H )(2then, 212212)21(1)21)(()()()(--++-=--==E E E E E E H E H E H ααβαβ∴][]2[2]1[)21(][n x n y n y n y βαα=-+-+-but, ][]1[43]2[81][n x n y n y n y +-+--=∴⎪⎩⎪⎨⎧=⎪⎭⎫ ⎝⎛=+=143)21(:....812βααor ∴⎪⎩⎪⎨⎧==141βα(b). from (a), we know )21)(41()()()(221--==E E E E H E H E H21241-+--=E EE E ∴][)41()21(2][n u n h n n ⎥⎦⎤⎢⎣⎡-=2.20 (a). 1⎰⎰∞∞-∞∞-===1)0cos()cos()()cos()(0dt t t dt t t u δ(b). 0dt t t )3()2sin(5+⎰δπ has value only on 3-=t , but ]5,0[3∉-∴dt t t )3()2sin(5+⎰δπ=0(c). 0⎰⎰---=-641551)2cos()()2cos()1(dt t t u d u πτπττ⎰-'-=64)2cos()(dt t t πδ0|)2(s co ='=t t π 0|)2sin(20=-==t t ππ∑∞-∞=-==k t h kT t t h t x t y )(*)()(*)()(δ∑∞-∞=-=k kT t h )(∴2.27Solution()y A y t dt ∞-∞=⎰,()xA x t dt ∞-∞=⎰,()hA h t dt ∞-∞=⎰.()()*()()()y t x t h t x x t d τττ∞-∞==-⎰()()()()()()()()()(){()}y x hA y t dt x x t d dtx x t dtd x x t dtd x x d d x d x d A A ττττττττττξξτττξξ∞∞∞-∞-∞-∞∞∞∞∞-∞-∞-∞-∞∞∞∞∞-∞-∞-∞-∞==-=-=-===⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰(a) ()()(2)tt y t e x d τττ---∞=-⎰,Let ()()x t t δ=,then ()()y t h t =. So , 2()(2)(2)()(2)()(2)t t t t t h t ed e d e u t τξδττδξξ---------∞-∞=-==-⎰⎰(b) (2)()()*()[(1)(2)]*(2)t y t x t h t u t u t e u t --==+---(2)(2)(1)(2)(2)(2)t t u eu t d u e u t d ττττττττ∞∞-------∞-∞=+------⎰⎰22(2)(2)12(1)(4)t t t t u t e d u t e d ττττ---------=---⎰⎰(2)2(2)212(1)[]|(4)[]|t t t t u t e e u t ee ττ-------=--- (1)(4)[1](1)[1](4)t t e u t e u t ----=-----2.46 SolutionBecause)]1([2)1(]2[)(33-+-=--t u dtde t u e dt d t x dt d t t )1(2)(3)1(2)(333-+-=-+-=--t e t x t e t x t δδ.From LTI property ,we know)1(2)(3)(3-+-→-t h e t y t x dtdwhere )(t h is the impulse response of the system. So ,following equation can be derived.)()1(223t u e t h e t --=-Finally, )1(21)()1(23+=+-t u e e t h t 2.47 SoliutionAccording to the property of the linear time-invariant system: (a). )(2)(*)(2)(*)()(000t y t h t x t h t x t y ===(b). )(*)]2()([)(*)()(00t h t x t x t h t x t y --==)(*)2()(*)(0000t h t x t h t x --=012y(t)t4)2()(00--=t y t y(c). )1()1(*)(*)2()1(*)2()(*)()(00000-=+-=+-==t y t t h t x t h t x t h t x t y δ(d). The condition is not enough.(e). )(*)()(*)()(00t h t x t h t x t y --==τττd t h x )()(00+--=⎰∞∞-)()()(000t y dm m t h m x -=--=⎰∞∞-(f). )()]([)](*)([)(*)()(*)()(000000t y t y t h t x t h t x t h t x t y "=''='--'=-'-'==Extra problems:1. Solute h(t), h[n](1). )()(6)(5)(22t x t y t y dt dt y dtd =++ (2). ]1[][2]1[2]2[+=++++n x n y n y n y Solution:(1). Because 3121)3)(2(1651)(2+-++=++=++=P P P P P P P Hso )()()()3121()(32t u e e t P P t h t t ---=+-++=δ (2). Because )1)(1(1)1(22)(22i E i E EE E E E E E H -+++=++=++=iE Eii E E i -+-+++=1212 so []][)1()1(2][1212][n u i i i k i E E i i E E i n h n n +----=⎪⎪⎪⎪⎭⎫⎝⎛-+-+++=δChapter 33.1 Solution:Fundamental period 8T =.02/8/4ωππ==00000000033113333()224434cos()8sin()44j kt j t j t j t j tk k j t j t j t j tx t a e a e a e a e a e e e je je t t ωωωωωωωωωππ∞----=-∞--==+++=++-=-∑3.2 Solution:for, 10=a , 4/2πj ea --= , 4/2πj ea = , 3/42πj ea --=, 3/42πj ea =n N jk k N k e a n x )/2(][π∑>=<=n j n j n j n j e a e a e a e a a )5/8(4)5/8(4)5/4(2)5/4(20ππππ----++++=n j j n j j n j j n j j e e e e e e e e )5/8(3/)5/8(3/)5/4(4/)5/4(4/221ππππππππ----++++= )358cos(4)454cos(21ππππ++++=n n)6558sin(4)4354sin(21ππππ++++=n n3.3 Solution: for the period of )32cos(t πis 3=T , the period of )35sin(t πis 6=Tso the period of )(t x is 6 , i.e. 3/6/20ππ==w)35sin(4)32cos(2)(t t t x ππ++= )5sin(4)2cos(21200t w t w ++=)(2)(21200005522t w j t w j t w j t w j e e j e e ----++=then, 20=a , 2122==-a a , j a 25=-, j a 25-=3.5 Solution:(1). Because )1()1()(112-+-=t x t x t x , then )(2t x has the same period as )(1t x ,that is 21T T T ==, 12w w =(2). 212111()((1)(1))jkw t jkw tk T T b x t e dt x t x t e dt T--==-+-⎰⎰111111(1)(1)jkw tjkw t T Tx t e dt x t e dt T T --=-+-⎰⎰ 111)(jkw k k jkw k jkw k e a a e a e a -----+=+=3.8 Solution:kt jw k k e a t x 0)(∑∞-∞==while:)(t x is real and odd, then 00=a , k k a a --=2=T , then ππ==2/20wand0=k a for 1>kso kt jw k k e a t x 0)(∑∞-∞==t jw t jw e a e a a 00110++=--)sin(2)(11t a e e a t j t j πππ=-=-for12)(2121212120220==++=-⎰a a a a dt t x∴2/21±=a ∴)sin(2)(t t x π±=3.13 Solution:Fundamental period 8T =.02/8/4ωππ==kt jw k k e a t x 0)(∑∞-∞==∴t jkw k k e jkw H a t y 0)()(0∑∞-∞==0004, 0sin(4)()0, 0k k H jk k k ωωω=⎧==⎨≠⎩ ∴000()()4jkw t k k y t a H jkw e a ∞=-∞==∑Because 48004111()1(1)088T a x t dt dt dt T ==+-=⎰⎰⎰So ()0y t =.kt jw k k e a t x 0)(∑∞-∞==∴t jkw k k e jkw H a t y 0)()(0∑∞-∞== ∴dt e jkw H t y Ta t jkw Tk 0)()(10-⎰=for⎪⎩⎪⎨⎧>≤=100, (0100),.......1)(w w jw H ∴if 0=k a , it needs 1000>kwthat is 12100,........1006/2>>k kππand k is integer, so 8>K3.22 Solution:021)(1110===⎰⎰-tdt dt t x Ta Tdt te dt te dt e t x T a t jk t jk t jkw T k ππ-----⎰⎰⎰===1122112121)(10t jk tde jk ππ--⎰-=1121⎥⎥⎦⎤⎢⎢⎣⎡---=----111121ππππjk e te jk t jk tjk ⎥⎦⎤⎢⎣⎡---+-=--ππππππjk e e e e jk jk jk jk jk )()(21⎥⎦⎤⎢⎣⎡-+-=ππππjk k k jk )sin(2)cos(221[]πππππk jk k j k jk k)1()cos()cos(221-==-=0............≠k404402()()1184416tj tj t t j tt j t H j h t edt ee dte edt e e dtj j ωωωωωωωω∞∞----∞-∞∞----∞===+=+=-++⎰⎰⎰⎰A periodic continous-signal has Fourier Series:. 0()j kt k k x t a e ω∞=-∞=∑T is the fundamental period of ()x t .02/T ωπ=The output of LTI system with inputed ()x t is 00()()jk t k k y t a H jk e ωω∞=-∞=∑Its coefficients of Fourier Series: 0()k k b a H jk ω= (a)()()n x t t n δ∞=-∞=-∑.T=1, 02ωπ=11k a T==. 01/221/21()()1jkw t jk tk T a x t e dt t e dt Tπδ---===⎰⎰ (Note :If ()()n x t t nT δ∞=-∞=-∑,1k a T=) So 2282(2)16(2)4()k k b a H jk k k πππ===++ (b)()(1)()n n x t t n δ∞=-∞=--∑ .T=2, 0ωπ=,11k a T== 01/23/21/21/2111()()(1)(1)221[1(1)]2jkw t jk tjk t k T k a x t e dt t e dt t e dtT ππδδ----==+--=--⎰⎰⎰So 24[1(1)]()16()k k k b a H jk k ππ--==+, (c) T=1,02ωπ=01/421/4sin()12()jk t jk tk T k a x t e dt e dt Tk ωπππ---===⎰⎰28sin()2()[16(2)]k k k b a H jk k k ππππ==+ 3.35 Solution: T= /7π,02/14T ωπ==.kt jw k k e a t x 0)(∑∞-∞==∴t jkw k k e jkw H a t y 0)()(0∑∞-∞==∴0()k k b a H jkw =for⎩⎨⎧≥=otherwise w jw H ,.......0250,.......1)(,01,. (17)()0,.......k H jkw otherwise ⎧≥⎪=⎨⎪⎩that is 0250250, (14)k k ω<<, and k is integer, so 18....17k or k <≤. Let ()()y t x t =,k k b a =, it needs 0=k a ,for 18....17k or k <≤.3.37 Solution:11()[]()212()21312411511cos 224nj j nj n n n n j nn j nn n j j j H e h n ee ee e e e ωωωωωωωωω∞∞--=-∞=-∞-∞--=-∞=-===+=+=---∑∑∑∑A periodic sequence has Fourier Series:2()[]jk n Nk k N x n a eπ=<>=∑.N is the fundamental period of []x n .The output of LTI system with inputed []x n is 22()[]()jk jk n NNk k N y n a H eeππ=<>=∑.Its coefficients of Fourier Series: 2()jk Nk k b a H eπ=(a)[][4]k x n n k δ∞=-∞=-∑.N=4, 14k a =.So 2314()524cos()44j k Nk k b a H e k ππ==-3165cos()42k b k π=-3.40 Solution: According to the property of fourier series: (a). )2cos(2)cos(20000000t Tka t kw a e a ea a k k t jkw k t jkw k k π==+='- (b). Because 2)()()}({t x t x t x E v -+=}{2k v k k k a E a a a =+='-(c). Because 2)(*)()}({t x t x t x R e +=2*kk k a a a -+='(d). k k k a Tjka jkw a 220)2()(π=='(e). first, the period of )13(-t x is 3T T ='then 3)(1)13(131213120dme m x T dt e t x T a m T jk T t T jk T k +'--'-'-'⎰⎰'=-'='ππTjkk m T jk T T jk T jk m T jk T ea dm e m x T e dm e e m x T πππππ221122211)(1)(1---------=⎥⎦⎤⎢⎣⎡==⎰⎰3.43 (a) Proof:(i )Because ()x t is odd harmonic ,(2/)()jk T t k k x t a e π∞=-∞=∑,where 0k a = for everynon-zero even k.(2/)()2(2/)(2/)()2T jk T t k k jk jk T tk k jk T tk k T x t a ea e e a e ππππ∞+=-∞∞=-∞∞=-∞+===-∑∑∑It is noticed that k is odd integers or k=0.That means()()2Tx t x t =-+(ii )Because of ()()2Tx t x t =-+,we get the coefficients of Fourier Series222/200/222(/2)/2/20022/2/200111()()()11()(/2)11()()(1)jk t jk t jk t T T T T T T k T jk t jk t T T T T Tjk t jk t T T k TT a x t e dt x t e dt x t e dtT T T x t e dt x t T e dt T T x t e dt x t e dt T T πππππππ-----+--==+=++=--⎰⎰⎰⎰⎰⎰⎰ 2/21[1(1)]()jk t T kT x t e dt T π-=--⎰It is obvious that 0k a = for every non-zero even k. So ()x t is odd harmonic ,(b)Extra problems:∑∞-∞=-=k kT t t x )()(δ, π=T(1). Consider )(t y , when )(jw H ist(2). Consider )(t y , when )(jw H isSolution:∑∞-∞=-=k kT t t x )()(δ↔π11=T , 220==Tw π(1).kt j k k tjkw k k e k j H a ejkw H a t y 20)2(1)()(0∑∑∞-∞=∞-∞===ππ2=(for k can only has value 0)(2).kt j k k tjkw k k e k j H a e jkw H a t y 20)2(1)()(0∑∑∞-∞=∞-∞===πππte e t j t j 2cos 2)(122=+=- (for k can only has value –1 and 1)。
信号与系统_第二版_奥本海默 _课后答案[1-10章]
![信号与系统_第二版_奥本海默 _课后答案[1-10章]](https://img.taocdn.com/s3/m/6ff45c8f83c4bb4cf6ecd112.png)
学霸助手[]-课后答案|期末试卷|复习提纲
学霸h助us手 Contents baz Chapter 1 ······················································· 2 xue Chapter 2 ······················································· 17
e 5 = 5 j0 ,
e -2 = 2 ,jp
e -3 j = 3
-
j
p 2
e 1
2
-
j
3 2
=
, -
j
p 2
e 1+ j =
2
, j
p 4
( ) 1- j e 2 =2
-
j
p 2
ep
j(1- j) = 4 ,
e 1+
1-
j j
=
p 4
e 2 + j 2 = -1p2
1+ j 3
ò e 1.3.
(a)
xue学ba霸zh助usS手hoiug.ncoaml(Sseco&nd EdSitioyn)stems
—Learning Instructions
xu(eEbxe学arzc霸hisue助sshA手onus.wceorms)
Department
of
Computer 2005.12
Enginexeurein学bga霸zh助us手
=¥
E¥
0
-4tdt
=
1 4
,
P ¥ =0, because
E¥ < ¥
手 om ò (b)
x e , 2(t) = j(2t+p4 )
信号与系统_奥本海姆_中文答案_全章节

第一章 1.3 解:(a). 2401lim(),04Tt T TE x t dt e dt P ∞-∞∞→∞-====⎰⎰(b) dt t x TP T TT ⎰-∞→∞=2)(21lim121lim ==⎰-∞→dt T TTT∞===⎰⎰∞∞--∞→∞dt t x dt t x E TTT 22)()(lim(c).222lim()cos (),111cos(2)1lim()lim2222TT TTTT T TTE x t dt t dt t P x t dt dt TT∞∞→∞--∞∞→∞→∞--===∞+===⎰⎰⎰⎰(d) 034121lim )21(121lim ][121lim 022=⋅+=+=+=∞→=∞→-=∞→∞∑∑N N n x N P N Nn n N N N n N 34)21()(lim202===∑∑-∞=∞→∞nNNn N n x E (e). 2()1,x n E ∞==∞211lim []lim 112121N NN N n N n NP x n N N ∞→∞→∞=-=-===++∑∑ (f) ∑-=∞→∞=+=NNn N n x N P 21)(121lim 2∑-=∞→∞∞===NNn N n x E 2)(lim1.9. a). 00210,105T ππω===; b) 非周期的; c) 00007,,22m N N ωωππ=== d). 010;N = e). 非周期的; 1.12 解:∑∞=--3)1(k k n δ对于4n ≥时,为1即4≥n 时,x(n)为0,其余n 值时,x(n)为1 易有:)3()(+-=n u n x , 01,3;M n =-=-1.15 解:(a)]3[21]2[][][222-+-==n x n x n y n y , 又2111()()2()4(1)x n y n x n x n ==+-, 1111()2[2]4[3][3]2[4]y n x n x n x nx n ∴=-+-+-+-,1()()x n x n =()2[2]5[3]2[4]y n x n x n x n =-+-+- 其中][n x 为系统输入。
信号与系统(奥本海默)chapter9-1

x(t ) e u(t ) e u(t )
2t
t
留数法(当 X ( s ) 是有理函数时): 1. 求出 X ( s ) 的全部极点。
2. 求出 X (s)est 在 ROC 左边的所有极点处的留 数之和,它们构成了x(t ) 的因果部分。 3. 求出 X (s)est 在 ROC 右边的所有极点处的留 数之和,并加负号,它们构成了 x(t ) 的反因果 部分。
at st
0
0
( s a )t
1 dt Re[s] a sa
与例1.比较,区别仅在于收敛域不同。
由以上例子,可以看出: 1. 拉氏变换与傅里叶变换一样存在收敛问题。并
非任何信号的拉氏变换都存在,也不是 S 平面上
的任何复数都能使拉氏变换收敛。
2. 使拉氏变换积分收敛的那些复数 S的集合,称
st
st
显然当s
j 时,就是连续时间傅里叶变换。
一.双边拉氏变换的定义:
X (s) x(t )e st dt
称为 x(t ) 的双边拉氏变换,其中 s j 。
s j 则有: X ( j ) x(t )e jt dt 若 0,
这就是 x(t ) 的傅里叶变换。 表明:连续时间傅里叶变换是双边拉普拉斯变换
比较 X ( s ) 和 X ( j ),显然有
X ( s)
s j
X ( j )
at x ( t ) e u(t ) u(t ) a 0 当 时, 1 Re[ s] 0 可知 u (t ) s
at x ( t ) e u(t ) 例2.
X ( s ) e e dt e
信号与系统-奥本海姆-中文答案-chapter-9

第九章9.6 解:(a) 若是有限持续期信号Roc 为整个s 平面,故存在极点不可能,故不可能为有限持续期。
(b) 可能是左边的。
(c) 不可能是右边的,若是右边信号,它并不是绝对可积的。
(d) x(t)可能为双边的。
9.8 解:因为te t x t g 2)()(=的傅氏变换,)(ωj G 收敛所以)(t x 绝对可积若)(t x 为左边或者右边信号,则)(t x 不绝对可积故)(t x 为双边信号9.10 解:(a) 低通(b) 带通(c) 高通9.14 解:dt e t x s X st ⎰∞∞--=)()(, 由)(t x 是偶函数可得)()()(t d e t x s X st --=⎰-∞∞ dt e t x t s ⎰∞∞----=)()(dt e t x t s ⎰∞∞---=)()( )(s X -=421πj e s =为极点,故421πj e s -=也为极点,由)(t x 是实信号可知其极点成对出现,故421πj e s -=与421πj e s --=也为极点。
)21)(21)(21)(21()(4444ππππj j j j e s e s e s e s Ms X --++--=由⎰∞∞-=4)(dt t x 得 4)0(=x所以,M =1/4 即,42}Re{42<<-s 9.21 解: (a) 3121)(+++=s s s X 2}Re{->s (b) 25)5(541)(2++++=s s s X 4}Re{->s (c) 3121)(----=s s s X 2}Re{<s (d) 22)2(1)2(1)(--+=s s s X 2}Re{2<<-s (e) 22)2(1)2(1)(-++-=s s s X 2}Re{2<<-s (f) 2)2(1)(-=s s X 2}Re{<s (g) )1(1)(s e ss X --= 0}Re{>s (h) 22)1()(se s X s -=- 0}Re{>s(i) ss X 11)(+= 0}Re{>s (j) ss X 131)(+= 0}Re{>s9.23 解:1. Roc 包括 Re{s}=32. Roc 包括 Re{s}=03. Roc 在最左边极点的左边4. Roc 在最右边极点的右边图1:1,2}Re{>s2,2}Re{2<<-s3,2}Re{-<s4,2}Re{>s图2: 1,2}Re{->s2,2}Re{->s3,2}Re{-<s4,2}Re{->s图3: 1,2}Re{>s2,2}Re{<s3,2}Re{<s4,2}Re{>s图4: 1,S 为整个平面2,S 为整个平面3,S 为整个平面4,S 为整个平面9.25 解:图略9.27 解:)(t x Θ为实信号,)(s X 有一个极点为j s +-=1)(s X ∴另一个极点为j s --=1)1)(1()(j s j s M s X ++-+=∴ 又Θ8)0(=X16=∴M 则,)1(8)1(8)(j s j j s j s X -+-++= 1}Re{->s 或者1}Re{-<s 之一使其成立又 )(2t x e tΘ不是绝对可积的 ∴ 对任一个s ,右移2,不一定在Roc 中因此,1}Re{-<s9.35 解: (a) )(1)(*)(s X st u t x L −→−Θ 那么方框图表示的方程为)(*)(*)(6)(*)()()(*)(*)()(*)(2)(t u t u t y t u t y t y t u t u t x t u t x t x --=++即 ⎰⎰⎰⎰⎰⎰∞-∞-∞-∞-∞-∞---=++t tt t t t dt d y d y t y dt d x d x t x ττττττττ)(6)()()()(2)( 对两边求导可得)(6)()()()()(2222t x dt t dx dtt x d t y dt t dy dt t y d --=++ (b) 126)(22++--=s s s s s H 121-==s s 是)(s H 的二重极点,由于系统是因果的所以 1}Re{->sRoc 包含虚轴,所以系统是稳定的。
信号与系统奥本海姆第二版课后答案
信号与系统 奥本海姆第二版 习题解答Department of Computer Engineering2005.12ContentsChapter 1 (2)Chapter 2 (17)Chapter 3 (35)Chapter 4 (62)Chapter 5 (83)Chapter 6 (109)Chapter 7 (119)Chapter 8 (132)Chapter 9 (140)Chapter 10 (160)Chapter 1 Answers1.1 Converting from polar to Cartesian coordinates:111cos 222j eππ==- 111c o s ()222j e ππ-=-=- 2cos()sin()22jj j eπππ=+=2c o s ()s i n ()22jjj eπππ-=-=- 522j jj eeππ==4c o s ()s i n ())144jjj πππ+=+9441j jj ππ=-9441j j j ππ--==-41jj π-=-1.2 055j=, 22j e π-=,233jj e π--=212je π--=, 41j j π+=, ()2221jj eπ-=-4(1)j je π-=, 411j je π+=-12e π-1.3. (a) E ∞=4014tdt e∞-=⎰, P ∞=0, because E ∞<∞ (b) (2)42()j t t x eπ+=, 2()1t x =.Therefore, E ∞=22()dt t x +∞-∞⎰=dt +∞-∞⎰=∞,P ∞=211limlim222()TTTTT T dt dt TTt x --→∞→∞==⎰⎰lim11T →∞=(c) 2()t x =cos(t). Therefore, E ∞=23()dt t x +∞-∞⎰=2cos()dt t +∞-∞⎰=∞, P ∞=2111(2)1lim lim 2222cos()TTTTT T COS t dt dt T Tt --→∞→∞+==⎰⎰(d)1[][]12nn u n x =⎛⎫ ⎪⎝⎭,2[]11[]4nu n n x =⎛⎫ ⎪⎝⎭. Therefore, E ∞=24131[]4nn n x +∞∞-∞===⎛⎫∑∑ ⎪⎝⎭P ∞=0,because E ∞<∞.(e) 2[]n x =()28n j e ππ-+,22[]n x =1. therefore, E ∞=22[]n x +∞-∞∑=∞,P ∞=211limlim1122121[]NNN N n Nn NN N n x →∞→∞=-=-==++∑∑.(f) 3[]n x =cos 4nπ⎛⎫ ⎪⎝⎭. Therefore, E ∞=23[]n x +∞-∞∑=2cos()4n π+∞-∞∑=2cos()4n π+∞-∞∑,P ∞=1limcos 214nNN n NN π→∞=-=+⎛⎫∑ ⎪⎝⎭1cos()112lim ()2122NN n Nn N π→∞=-+=+∑ 1.4. (a) The signal x[n] is shifted by 3 to the right. The shifted signal will be zero for n<1, And n>7. (b) The signal x[n] is shifted by 4 to the left. The shifted signal will be zero for n<-6. And n>0. (c) The signal x[n] is flipped signal will be zero for n<-1 and n>2.(d) The signal x[n] is flipped and the flipped signal is shifted by 2 to the right. The new Signal will be zero for n<-2 and n>4.(e) The signal x[n] is flipped and the flipped and the flipped signal is shifted by 2 to the left. This new signal will be zero for n<-6 and n>0.1.5. (a) x(1-t) is obtained by flipping x(t) and shifting the flipped signal by 1 to the right. Therefore, x (1-t) will be zero for t>-2. (b) From (a), we know that x(1-t) is zero for t>-2. Similarly, x(2-t) is zero for t>-1, Therefore, x (1-t) +x(2-t) will be zero for t>-2. (c) x(3t) is obtained by linearly compression x(t) by a factor of3. Therefore, x(3t) will be zero for t<1.(d) x(t/3) is obtained by linearly compression x(t) by a factor of 3. Therefore, x(3t) will bezero for t<9.1.6(a) x1(t) is not periodic because it is zero for t<0.(b) x2[n]=1 for all n. Therefore, it is periodic with a fundamental period of 1.(c) x3[n1.7. (a)()1[]vnxε={}1111[][]([][4][][4])22n n u n u n u n u nx x+-=--+----Therefore, ()1[]vnxεis zero for1[]nx>3.(b) Since x1(t) is an odd signal, ()2[]vnxεis zero for all values of t.(c)(){}11311[][][][3][3]221122vn nn n n u n u nx x xε-⎡⎤⎢⎥=+-=----⎢⎥⎢⎥⎣⎦⎛⎫⎛⎫⎪ ⎪⎝⎭⎝⎭Therefore, ()3[]vnxεis zero when n<3 and when n→∞.(d) ()1554411()(()())(2)(2)22vt tt t t u t u tx x x e eε-⎡⎤=+-=---+⎣⎦Therefore, ()4()vtxεis zero only when t→∞.1.8. (a) ()01{()}22cos(0)tt tx eπℜ=-=+(b) ()02{()}cos()cos(32)cos(3)cos(30)4tt t t tx eππℜ=+==+(c) ()3{()}sin(3)sin(3)2t tt t tx e eππ--ℜ=+=+(d) ()224{()}sin(100)sin(100)cos(100)2t t tt t t tx e e eππ---ℜ=-=+=+1.9. (a)1()tx is a periodic complex exponential.101021()j t j tt jx e eπ⎛⎫+⎪⎝⎭==(b)2()tx is a complex exponential multiplied by a decaying exponential. Therefore,2()tx is not periodic.(c)3[]nx is a periodic signal. 3[]n x=7j neπ=j neπ.3[]nx is a complex exponential with a fundamental period of 22ππ=.(d)4[]nx is a periodic signal. The fundamental period is given by N=m(23/5ππ)=10().3mBy choosing m=3. We obtain the fundamental period to be 10.(e)5[]nx is not periodic. 5[]nx is a complex exponential with 0w=3/5. We cannot find any integer m such that m(2wπ) is also an integer. Therefore,5[]nxis not periodic.1.10. x(t)=2cos(10t+1)-sin(4t-1)Period of first term in the RHS =2105ππ=.Period of first term in the RHS =242ππ=.Therefore, the overall signal is periodic with a period which the least commonmultiple of the periods of the first and second terms. This is equal toπ.1.11. x[n] = 1+74j n e π−25j n e πPeriod of first term in the RHS =1. Period of second term in the RHS =⎪⎭⎫ ⎝⎛7/42π=7 (when m=2)Period of second term in the RHS =⎪⎭⎫ ⎝⎛5/22ππ=5 (when m=1)Therefore, the overall signal x[n] is periodic with a period which is the least common Multiple of the periods of the three terms inn x[n].This is equal to 35.1.12. The signal x[n] is as shown in figure S1.12. x[n] can be obtained by flipping u[n] and thenShifting the flipped signal by 3 to the right. Therefore, x[n]=u[-n+3]. This implies that M=-1 and no=-3.1.13y (t)=⎰∞-tdt x )(τ =dt t))2()2((--+⎰∞-τδτδ=⎪⎩⎪⎨⎧>≤≤--<2,022,12,0,t t tTherefore ⎰-==∞224d t E∑∑∞-∞=∞-∞=----=k k k t k t t g 12(3)2(3)(δδ)This implies that A 1=3, t 1=0, A 2=-3, and t 2=1.1.15 (a) The signal x 2[n], which is the input to S 2, is the same as y 1[n].Therefore ,y 2[n]= x 2[n-2]+21x 2[n-3] = y 1[n-2]+ 21y 1[n-3]=2x 1[n-2] +4x 1[n-3] +21( 2x 1[n-3]+ 4x 1[n-4]) =2x 1[n-2]+ 5x 1[n-3] + 2x 1[n-4] The input-output relationship for S isy[n]=2x[n-2]+ 5x [n-3] + 2x [n-4](b) The input-output relationship does not change if the order in which S 1and S 2 are connected series reversed. . We can easily prove this assuming that S 1 follows S 2. In this case , the signal x 1[n], which is the input to S 1 is the same as y 2[n].Therefore y 1[n] =2x 1[n]+ 4x 1[n-1]= 2y 2[n]+4 y 2[n-1]=2( x 2[n-2]+21 x 2[n-3] )+4(x 2[n-3]+21x 2[n-4]) =2 x 2[n-2]+5x 2[n-3]+ 2 x 2[n-4]The input-output relationship for S is once againy[n]=2x[n-2]+ 5x [n-3] + 2x [n-4]1.16 (a)The system is not memory less because y[n] depends on past values of x[n].(b)The output of the system will be y[n]= ]2[][-n n δδ=0(c)From the result of part (b), we may conclude that the system output is always zero for inputs of the form ][k n -δ, k ∈ ґ. Therefore , the system is not invertible .1.17 (a) The system is not causal because the output y(t) at some time may depend on future values of x(t). For instance , y(-π)=x(0).(b) Consider two arbitrary inputs x 1(t)and x 2(t).x 1(t) →y 1(t)= x 1(sin(t)) x 2(t) → y 2(t)= x 2(sin(t))Let x 3(t) be a linear combination of x 1(t) and x 2(t).That is , x 3(t)=a x 1(t)+b x 2(t)Where a and b are arbitrary scalars .If x 3(t) is the input to the given system ,then the corresponding output y 3(t) is y 3(t)= x 3( sin(t))=a x 1(sin(t))+ x 2(sin(t)) =a y 1(t)+ by 2(t)Therefore , the system is linear.1.18.(a) Consider two arbitrary inputs x 1[n]and x 2[n].x 1[n] → y 1[n] =][01k x n n n n k ∑+-=x 2[n ] → y 2[n] =][02k x n n n n k ∑+-=Let x 3[n] be a linear combination of x 1[n] and x 2[n]. That is :x 3[n]= ax 1[n]+b x 2[n]where a and b are arbitrary scalars. If x 3[n] is the input to the given system, then the corresponding outputy 3[n] is y 3[n]=][03k x n n n n k ∑+-==])[][(2100k bx k ax n n n n k +∑+-==a ][001k x n n n n k ∑+-=+b ][02k x n n n n k ∑+-== ay 1[n]+b y 2[n]Therefore the system is linear.(b) Consider an arbitrary input x 1[n].Lety 1[n] =][01k x n n n n k ∑+-=be the corresponding output .Consider a second input x 2[n] obtained by shifting x 1[n] in time:x 2[n]= x 1[n-n 1]The output corresponding to this input isy 2[n]=][02k x n n n n k ∑+-== ]n [1100-∑+-=k x n n n n k = ][01011k x n n n n n n k ∑+---=Also note that y 1[n- n 1]=][01011k x n n n n n n k ∑+---=.Therefore , y 2[n]= y 1[n- n 1] This implies that the system is time-invariant.(c) If ][n x <B, then y[n]≤(2 n 0+1)B. Therefore ,C ≤(2 n 0+1)B.1.19 (a) (i) Consider two arbitrary inputs x 1(t) and x 2(t). x 1(t) → y 1(t)= t 2x 1(t-1)x 2(t) → y 2(t)= t 2x 2(t-1)Let x 3(t) be a linear combination of x 1(t) and x 2(t).That is x 3(t)=a x 1(t)+b x 2(t)where a and b are arbitrary scalars. If x 3(t) is the input to the given system, then the corresponding output y 3(t) is y 3(t)= t 2x 3 (t-1)= t 2(ax 1(t-1)+b x 2(t-1))= ay 1(t)+b y 2(t)Therefore , the system is linear.(ii) Consider an arbitrary inputs x 1(t).Let y 1(t)= t 2x 1(t-1)be the corresponding output .Consider a second input x 2(t) obtained by shifting x 1(t) in time:x 2(t)= x 1(t-t 0)The output corresponding to this input is y 2(t)= t 2x 2(t-1)= t 2x 1(t- 1- t 0)Also note that y 1(t-t 0)= (t-t 0)2x 1(t- 1- t 0)≠ y 2(t) Therefore the system is not time-invariant.(b) (i) Consider two arbitrary inputs x 1[n]and x 2[n]. x 1[n] → y 1[n] = x 12[n-2]x 2[n ] → y 2[n] = x 22[n-2].Let x 3(t) be a linear combination of x 1[n]and x 2[n].That is x 3[n]= ax 1[n]+b x 2[n]where a and b are arbitrary scalars. If x 3[n] is the input to the given system, then the corresponding output y 3[n] is y 3[n] = x 32[n-2]=(a x 1[n-2] +b x 2[n-2])2=a 2x 12[n-2]+b 2x 22[n-2]+2ab x 1[n-2] x 2[n-2]≠ ay 1[n]+b y 2[n]Therefore the system is not linear.(ii) Consider an arbitrary input x 1[n]. Let y 1[n] = x 12[n-2]be the corresponding output .Consider a second input x 2[n] obtained by shifting x 1[n] in time:x 2[n]= x 1[n- n 0]The output corresponding to this input isy 2[n] = x 22[n-2].= x 12[n-2- n 0]Also note that y 1[n- n 0]= x 12[n-2- n 0] Therefore , y 2[n]= y 1[n- n 0] This implies that the system is time-invariant.(c) (i) Consider two arbitrary inputs x 1[n]and x 2[n].x 1[n] →y 1[n] = x 1[n+1]- x 1[n-1] x 2[n ]→y 2[n] = x 2[n+1 ]- x 2[n -1]Let x 3[n] be a linear combination of x 1[n] and x 2[n]. That is :x 3[n]= ax 1[n]+b x 2[n]where a and b are arbitrary scalars. If x 3[n] is the input to the given system, then the corresponding output y 3[n] is y 3[n]= x 3[n+1]- x 3[n-1]=a x 1[n+1]+b x 2[n +1]-a x 1[n-1]-b x 2[n -1]=a(x 1[n+1]- x 1[n-1])+b(x 2[n +1]- x 2[n -1])= ay 1[n]+b y 2[n]Therefore the system is linear.(ii) Consider an arbitrary input x 1[n].Let y 1[n]= x 1[n+1]- x 1[n-1]be the corresponding output .Consider a second input x 2[n] obtained by shifting x 1[n] in time: x 2[n]= x 1[n-n 0]The output corresponding to this input isy 2[n]= x 2[n +1]- x 2[n -1]= x 1[n+1- n 0]- x 1[n-1- n 0] Also note that y 1[n-n 0]= x 1[n+1- n 0]- x 1[n-1- n 0] Therefore , y 2[n]= y 1[n-n 0] This implies that the system is time-invariant.(d) (i) Consider two arbitrary inputs x 1(t) and x 2(t).x 1(t) → y 1(t)= d O {}(t) x 1 x 2(t) → y 2(t)= {}(t) x 2d OLet x 3(t) be a linear combination of x 1(t) and x 2(t).That is x 3(t)=a x 1(t)+b x 2(t)where a and b are arbitrary scalars. If x 3(t) is the input to the given system, then the corresponding output y 3(t) is y 3(t)= d O {}(t) x 3={}(t) x b +(t) ax 21d O=a d O {}(t) x 1+b {}(t) x 2d O = ay 1(t)+b y 2(t)Therefore the system is linear.(ii) Consider an arbitrary inputs x 1(t).Lety 1(t)= d O {}(t) x 1=2)(x -(t) x 11t -be the corresponding output .Consider a second input x 2(t) obtained by shifting x 1(t) in time:x 2(t)= x 1(t-t 0)The output corresponding to this input isy 2(t)= {}(t) x 2d O =2)(x -(t) x 22t -=2)(x -)t -(t x 0101t t --Also note that y 1(t-t 0)= 2)(x -)t -(t x 0101t t --≠ y 2(t)Therefore the system is not time-invariant.1.20 (a) Givenx )(t =jt e 2 y(t)=t j e 3x )(t =jt e 2- y(t)=t j e 3- Since the system liner+=tj e t x 21(2/1)(jt e 2-))(1t y =1/2(tj e 3+tj e 3-)Thereforex 1(t)=cos(2t))(1t y =cos(3t)(b) we know thatx 2(t)=cos(2(t-1/2))= (j e -jte 2+je jt e 2-)/2Using the linearity property, we may once again writex 1(t)=21( j e -jt e 2+j e jte 2-))(1t y =(j e -jt e 3+je jte 3-)= cos(3t-1)Therefore,x 1(t)=cos(2(t-1/2)))(1t y =cos(3t-1)1.21.The signals are sketched in figure S1.21.1.24 The even and odd parts are sketched in Figure S1.24 1.25 (a) periodic period=2π/(4)= π/2 (b) periodic period=2π/(4)= 2(c) x(t)=[1+cos(4t-2π/3)]/2. periodic period=2π/(4)= π/2 (d) x(t)=cos(4πt)/2. periodic period=2π/(4)= 1/2 (e) x(t)=[sin(4πt)u(t)-sin(4πt)u(-t)]/2. Not period. (f) Not period.1.26 (a) periodic, period=7.(b) Not period.(c) periodic, period=8.(d) x[n]=(1/2)[cos(3πn/4+cos(πn/4)). periodic, period=8. (e) periodic, period=16. 1.27 (a) Linear, stable(b) Not period. (c) Linear(d) Linear, causal, stable(e) Time invariant, linear, causal, stable (f) Linear, stable(g) Time invariant, linear, causal 1.28 (a) Linear, stable(b) Time invariant, linear, causal, stable (c)Memoryless, linear, causal (d) Linear, stable (e) Linear, stable(f) Memoryless, linear, causal, stable (g) Linear, stable1.29 (a) Consider two inputs to the system such that[][][]{}111.S e x n y n x n −−→=ℜand [][][]{}221.Se x n y n x n −−→=ℜNow consider a third inputx3[n]=x2[n]+x 1[n]. The corresponding system outputWill be [][]{}[][]{}[]{}[]{}[][]33121212e e e e y n x n x n x n x n x n y n y n ==+=+=+ℜℜℜℜtherefore, we may conclude that the system is additive Let us now assume that inputs to the system such that [][][]{}/4111.Sj e x n y n e x n π−−→=ℜand[][][]{}/4222.Sj e x n y n e x n π−−→=ℜNow consider a third input x 3 [n]= x 2 [n]+ x 1 [n]. The corresponding system outputWill be[][]{}()[]{}()[]{}()[]{}()[]{}()[]{}()[]{}[]{}[]{}[][]/433331122/4/41212cos /4sin /4cos /4sin /4cos /4sin /4j e m e m e m e j j e e y n e x n n x n n x n n x n n x n n x n n x n e x n e x n y n y n πππππππππ==-+-+-=+=+ℜℜI ℜI ℜI ℜℜ therefore, we may conclude that the system is additive (b) (i) Consider two inputs to the system such that()()()()211111Sdx t x t y t x t dt ⎡⎤−−→=⎢⎥⎣⎦and ()()()()222211S dx t x t y t x t dt ⎡⎤−−→=⎢⎥⎣⎦ Now consider a third input x3[t]=x2[t]+x 1[t]. The corresponding system outputWill be()()()()()()()()()2333211111211dx t y t x t dt d x t x t x t x t dt y t y t ⎡⎤=⎢⎥⎣⎦⎡⎤+⎡⎤⎣⎦=⎢⎥+⎢⎥⎣⎦≠+ therefore, we may conclude that the system is not additiveNow consider a third input x 4 [t]= a x 1 [t]. The corresponding system output Will be()()()()()()()()2444211211111dx t y t x t dt d ax t ax t dt dx t a x t dt ay t ⎡⎤=⎢⎥⎣⎦⎡⎤⎡⎤⎣⎦=⎢⎥⎢⎥⎣⎦⎡⎤=⎢⎥⎣⎦=Therefore, the system is homogeneous.(ii) This system is not additive. Consider the fowling example .Let δ[n]=2δ[n+2]+2δ[n+1]+2δ[n] andx2[n]=δ[n+1]+ 2δ[n+1]+ 3δ[n]. The corresponding outputs evaluated at n=0 are [][]120203/2y andy ==Now consider a third input x 3 [n]= x 2 [n]+ x 1 [n].= 3δ[n+2]+4δ[n+1]+5δ[n]The corresponding outputs evaluated at n=0 is y 3[0]=15/4. Gnarly, y 3[0]≠ ]0[][21y y n +.This[][][][][]444442,1010,x n x n x n y n x n otherwise ⎧--≠⎪=-⎨⎪⎩[][][][][][]4445442,1010,x n x n ax n y n ay n x n otherwise ⎧--≠⎪==-⎨⎪⎩Therefore, the system is homogenous.1.30 (a) Invertible. Inverse system y(t)=x(t+4)(b)Non invertible. The signals x(t) and x 1(t)=x(t)+2πgive the same output (c) δ[n] and 2δ[n] give the same output d) Invertible. Inverse system; y(t)=dx(t)/dt(e) Invertible. Inverse system y(n)=x(n+1) for n ≥0 and y[n]=x[n] for n<0 (f) Non invertible. x (n) and –x(n) give the same result (g)Invertible. Inverse system y(n)=x(1-n) (h) Invertible. Inverse system y(t)=dx(t)/dt(i) Invertible. Inverse system y(n) = x(n)-(1/2)x[n-1] (j) Non invertible. If x(t) is any constant, then y(t)=0 (k) δ[n] and 2δ[n] result in y[n]=0 (l) Invertible. Inverse system: y(t)=x(t/2)(m) Non invertible x 1 [n]= δ[n]+ δ[n-1]and x 2 [n]= δ[n] give y[n]= δ[n] (n) Invertible. Inverse system: y[n]=x[2n]1.31 (a) Note that x 2[t]= x 1 [t]- x 1 [t-2]. Therefore, using linearity we get y 2 (t)= y 1 (t)- y 1 (t-2).this is shown in Figure S1.31(b)Note that x3 (t)= x1 [t]+ x1 [t+1]. .Therefore, using linearity we get Y3 (t)= y1 (t)+ y1 (t+2). this is2(4) y 2(t) periodic, period T; x(t) periodic, period T/2;1.33(1) True x[n]=x[n+N ]; y 1 (n)= y 1 (n+ N 0)i.e. periodic with N 0=n/2if N is even and with period N 0=n if N is odd.(2)False. y 1 [n] periodic does no imply x[n] is periodic i.e. Let x[n] = g[n]+h[n] where0,1,[][]0,(1/2),nn even n even g n and h n n odd n odd⎧⎧==⎨⎨⎩⎩ Then y 1 [n] = x [2n] is periodic but x[n] is clearly not periodic. (3)True. x [n+N] =x[n]; y 2 [n+N 0] =y 2 [n] where N 0=2N (4) True. y 2 [n+N] =y 2 [n]; y 2 [n+N 0 ]=y 2 [n] where N 0=N/2 1.34. (a) ConsiderIf x[n] is odd, x[n] +x [-n] =0. Therefore, the given summation evaluates to zero. (b) Let y[n] =x 1[n]x 2[n] .Theny [-n] =x 1[-n] x 2[-n] =-x 1[n]x 2[n] =-y[n]. This implies that y[n] is odd.(c)ConsiderUsing the result of part (b), we know that x e [n]x o [n] is an odd signal .Therefore, using the result of part (a) we may conclude thatTherefore,(d)ConsiderAgain, since x e (t) x o (t) is odd,Therefore,1.35. We want to find the smallest N 0 such that m(2π /N) N 0 =2πk or N 0 =kN/m,{}1[][0][][]n n x n x x n x n ∞∞=-∞==++-∑∑22[][]e o n n n n x x ∞∞=-∞=-∞=+∑∑222[][][]e on n n n n n x x x∞∞∞=-∞=-∞=-∞==+∑∑∑2[][]0eon n n x x ∞=-∞=∑222[][][].e on n n n n n xx x ∞∞∞=-∞=-∞=-∞==+∑∑∑2220()()()2()().eoet dt t dt t dt t t dt x x x x x ∞∞∞∞-∞-∞-∞-∞=++⎰⎰⎰⎰0()()0.et t dt x x ∞-∞=⎰222()()().e ot dt t dt t dt xx x ∞∞∞-∞-∞-∞=+⎰⎰⎰()()()()()().xy yx t x t y d y t x d t φττττττφ∞-∞∞-∞=+=-+=-⎰⎰where k is an integer, then N must be a multiple of m/k and m/k must be an integer .this implies that m/k is a divisor of both m and N .Also, if we want the smallest possible N 0, then m/k should be the GCD of m and N. Therefore, N 0=N/gcd(m,N). 1.36.(a)If x[n] is periodic0(),0..2/j n N T o e where T ωωπ+= This implies that022o T kNT k T T Nππ=⇒==a rational number . (b)T/T 0 =p/q then x[n] =2(/)j n p q e π,The fundamental period is q/gcd(p,q) and the fundmental frequencyis(c) p/gcd(p,q) periods of x(t) are needed .1.37.(a) From the definition of ().xy t φWe havepart(a) that()().xx xx t t φφ=-This implies that()xy t φis(b) Note from even .Therefore,the odd part of().xx t φis zero.(c) Here, ()().xy xx t t T φφ=-and ()().yy xx t t φφ= 1.38.(a) We know that /22(2)().t t δδ=ThereforeThis implies that1(2)().2t t δδ=(b)The plot are as shown in Figure s3.18. 1.39 We havelim ()()lim (0)()0.u t t u t δδ→→==Also,0022gcd(,)gcd(,)gcd(,)gcd(,).T pp q p q p q p q q p q p pωωππ===/21lim (2)lim ().2t t δδ→∞→∞=01lim ()()().2u t t t δδ→=u Δ'(t ) 1 1/2Δ/2-Δ/2t 0tu Δ'(t )12Δ t 0tu Δ'(t ) 1 1/2Δ-Δttu Δ'(t )1 1/2Δ-Δt 0t⎰⎰∞∞∞--=-=0)()()()()(ττδτττδτd t u d t u t gTherefore,0,0()1,00t g t t undefined for t >⎧⎪=<⎨⎪=⎩()0()()()t u t t δττδτδτ-=-=-1.40.(a) If a system is additive ,then also, if a system is homogeneous,then(b) y(t)=x 2(t) is such a systerm . (c) No.For example,consider y(t) ()()ty t x d ττ-∞=⎰with ()()(1).x t u t u t =--Then x(t)=0for t>1,but y(t)=1 for t>1.1.41. (a) y[n]=2x[n].Therefore, the system is time invariant.(b) y[n]=(2n-1)x[n].This is not time-invariant because y[n- N 0]≠(2n-1)2x [n- N 0]. (c) y[n]=x[n]{1+(-1)n +1+(-1)n-1}=2x[n].Therefore, the system is time invariant .1.42.(a) Consider two system S 1 and S 2 connected in series .Assume that if x 1(t) and x 2(t) arethe inputs to S 1..then y 1(t) and y 2(t) are the outputs.respectively .Also,assume thatif y 1(t) and y 2(t) are the input to S 2 ,then z 1(t) and z 2(t) are the outputs, respectively . Since S 1 is linear ,we may write()()()()11212,s ax t bx t ay t by t +→+where a and b are constants. Since S 2 is also linear ,we may write()()()()21212,s ay t by t az t bz t +→+We may therefore conclude that)()()()(212121t b t a t b t a z z x x s s +−→−+Therefore ,the series combination of S 1 and S 2 is linear. Since S 1 is time invariant, we may write()()11010s x t T y t T -→-and()()21010s y t T z t T -→-Therefore,()()121010s s x t T z t T -→-Therefore, the series combination of S 1 and S 2 is time invariant.(b) False, Let y(t)=x(t)+1 and z(t)=y(t)-1.These corresponds to two nonlinear systems. If these systems are connected in series ,then z(t)=x(t) which is a linear system.00.()().00x t y t =→=0()()()()0x t x t y t y t =-→-=(c) Let us name the output of system 1 as w[n] and the output of system 2 as z[n] .Then11[][2][2][21][22]24y n z n w n w n w n ==+-+-[][][]241121-+-+=n x n x n xThe overall system is linear and time-invariant.1.43. (a) We have())(t y t x s−→−Since S is time-invariant.())(T t y T t x s-−→−-Now if x (t) is periodic with period T. x{t}=x(t-T). Therefore, we may conclude that y(t)=y(t-T).This impliesthat y(t) is also periodic with T .A similar argument may be made in discrete time . (b)1.44 (a) Assumption : If x(t)=0 for t<t 0 ,then y(t)=0 for t< t 0.To prove That : The system is causal.Let us consider an arbitrary signal x 1(t) .Let us consider another signal x 2(t) which is the same as x 1(t)fort< t 0. But for t> t 0 , x 2(t) ≠x 1(t),Since the system is linear,()()()()1212,x t x t y t y t -→-Since ()()120x t x t -=for t< t 0 ,by our assumption =()()120y t y t -=for t< t 0 .This implies that()()12y t y t =for t< t 0 . In other words, t he output is not affected by input values for 0t t ≥. Therefore, thesystem is causal .Assumption: the system is causal . To prove that :If x(t)=0 for t< t 0 .then y(t)=0 for t< t 0 .Let us assume that the signal x(t)=0 for t< t 0 .Then we may express x(t) as ()()12()x t x t x t =-, Where()()12x t x t = for t< t 0 . the system is linear .the output to x(t) will be()()12()y t y t y t =-.Now ,since the system is causal . ()()12y t y t = for t< t 0 .implies that()()12y t y t = for t< t 0 .Therefore y(t)=0 for t< t 0 .(b) Consider y(t)=x(t)x(t+1) .Now , x(t)=0 for t< t 0 implies that y(t)=0 for t< t 0 .Note that the system is nonlinear and non-causal .(c) Consider y(t)=x(t)+1. the system is nonlinear and causal .This does not satisfy the condition of part(a). (d) Assumption: the system is invertible. To prove that :y[n]=0 for all n only if x[n]=0 for all n . Consider[]0[]x n y n =→. Since the system is linear :2[]02[]x n y n =→.Since the input has not changed in the two above equations ,we require that y[n]= 2y[n].This implies that y[n]=0. Since we have assumed that the system is invertible , only one input could have led to this particular output .That input must be x[n]=0 .Assumption: y[n]=0 for all n if x[n]=0 for all n . To prove that : The system is invertible . Suppose that11[][]x n y n → and21[][]x n y n →Since the system is linear ,1212[][][][]0x n x n y n y n -=→-=By the original assumption ,we must conclude that 12[][]x n x n =.That is ,any particular y 1[n] can be produced that by only one distinct input x 1[n] .Therefore , the system is invertible. (e) y[n]=x 2[n]. 1.45. (a) Consider ,()111()()shx x t y t t φ→= and()222()()shx x t y t t φ→=.Now, consider ()()()312x t ax t bx t =+. The corresponding system output will be()()12331212()()()()()()()()()hx hx y t x h t d a x h t d b x t h t d a t b t ay t by t ττττττττφφ∞-∞∞∞-∞-∞=+=+++=+=+⎰⎰⎰Therefore, S is linear .Now ,consider x 4(t)=x 1(t-T).The corresponding system output will be()14411()()()()()()()hx y t x h t d x T h t d x h t T d t T τττττττττφ∞-∞∞-∞∞-∞=+=-+=++=+⎰⎰⎰Clearly, y 4(t)≠ y 1(t-T).Therefore ,the system is not time-invariant.The system is definitely not causal because the output at any time depends on future values of the input signal x(t).(b) The system will then be linear ,time invariant and non-causal. 1.46. The plots are in Figure S1.46.1.47.(a) The overall response of the system of Figure P1.47.(a)=(the response of the system to x[n]+x 1[n])-the response of the system to x 1[n]=(Response of a linear system L to x[n]+x 1[n]+zero input response of S)- (Response of a linear system L to x 1[n]+zero input response of S)=( (Response of a linear system L to x[n]).Chapter 2 answers2.1 (a) We have know that 1[]*[][][]k y x n h n h k x n k ∞=-∞==-∑1[][1][1][1][1]y n h x n h x n =-++-2[1]2[1]x n x n =++-This gives1[]2[1]4[]2[1]2[2]2[4]y n n n n n n δδδδδ=+++-+--- (b)We know that2[][2]*[][][2]k y n x n h n h k x n k ∞=-∞=+=+-∑Comparing with eq.(S2.1-1),we see that21[][2]y n y n =+(c) We may rewrite eq.(S2.1-1) as1[][]*[][][]k y n x n h n x k h n k ∞=-∞==-∑Similarly, we may write3[][]*[2][][2]k y n x n h n x k h n k ∞=-∞=+=+-∑Comparing this with eq.(S2.1),we see that31[][2]y n y n =+2.2 Using given definition for the signal h[n], we may write{}11[][3][10]2k h k u k u k -⎛⎫=+-- ⎪⎝⎭The signal h[k] is non zero only in the rang 1[][2]h n h n =+. From this we know that the signal h[-k] is non zero only in the rage 93k -≤≤.If we now shift the signal h[-k] by n to the right, then the resultant signal h[n-k] will be zero in the range (9)(3)n k n -≤≤+. Therefore ,9,A n =- 3B n =+ 2.3 Let us define the signals11[][]2nx n u n ⎛⎫= ⎪⎝⎭and1[][]h n u n =. We note that1[][2]x n x n =- and 1[][2]h n h n =+ Now,。
信号与系统奥本海姆英文版课后答案chapter9

Chapter 9 Answers9.1 (a )The given integral may be written as(5)0t j t e e dt σω∞-+⎰If σ<-5 ,then the function (5)te σ-+ grows towards ∞ with increasing t and the given integral does not converge .but if >-5,then the integral does converge (b) The given integral may be written as0(5)t j t e e d σω-+-∞⎰tIf σ>-5 ,then the function (5)te σ-+ grows towards ∞as t decreases towards -∞and the given integral does not converge .but if σ<-5,then the integral does converge (c) The given integral may be written as5(5)5t j t e e d σω-+-⎰tClearly this integral has a finite value for all finite values of σ. (d) The given integral may be written as(5)t j t e e d σω∞-+-∞⎰tIf σ>-5 ,then the function (5)t e σ-+ grows towards ∞as t decreases towards -∞and the given integral does not converge If σ<-5, ,then function (5)te σ-+ grows towards ∞ with increasing t and the given integral does not converge If σ=5, then the integral stilldoes not have a finite value. therefore, the integral does not converge for any value of σ. (e) The given integral may be written as 0(5)t j t e e d σω-+-∞⎰t+ (5)0t j t e e d σω∞-+⎰tThe first integral converges for σ<-5, the second internal converges if σ>-5,therefore, the given internal converges when σ<5. (f) The given integral may be written as0(5)t j t e e d σω-+-∞⎰tIf σ>5 ,then the function (5)te σ--+grows towards ∞ as t decrease towards -∞ and the given integral does not converge .but if σ<5,then the integral does converge. 9.2 (a)X(s)= 5(1)t dt eu t e dt ∞---∞⎰- =(5)0s tedt ∞-+⎰ =(5)5s es -++As shown in Example 9.1 the ROC will be {}Re s >-5. (b) By using eg.(9.3), we can easily show that g(t)=A 5te -u(-t-0t ) has the LaplacetransformG(s)= 0(5)5s t Ae s ++The ROC is specified as {}Re s <-5 . Therefore ,A=1 and 0t =-19.3 Using an analysis similar to that used in Example 9.3 we known that given signal has a Laplace transform of the formX(s)115s s β+++The corresponding ROC is {}Re s >max(-5,Re{β}). Since we are given that the ROCis Re{s}>-3, we know that Re{β}=3 . there are no constraints on the imaginary part of β. 9.4 We know form Table 9.2 thatWe also know form Table 9.1 thatx(t)= 1()Lx t -←−→X(s)= 1()X s - The ROC of X(s) is such that if 0s was in the ROC of 1()X s , then -0s will be in the ROC of X(s). Putting the two above equations together ,we havex(t)= 1x (-t) =sin(2)()t e t u t --L ←−→X(s)= 1()X s -=-222(1)2s -+, {}Re s <1the denominator of the form 2s -2s+5. Therefore, the poles of X(s) are 1+2j and 1-2j.9.5 (a) the given Laplace transform may be written as ()X s =24(1)(3)s s s +++.Clearly ,X(s) has a zero at s=-2 .since in X(s) the order of the denominator polynomial exceeds the order of the numerator polynomial by 1 ,X(s) has a zero at ∞. Therefore ,X(s) has one zero in finite s-plane and one zero at infinity. (b) The given Laplance transform may be written asX(s)=1(1)(1)s s s +-+= 11s -Clearly ,X(s) has no zero in the finite s-plane .Since in X(s) the of the denominatorpolynomial exceeds the order the numerator polynomial by 1,X(s) has a zero at ∞.therefore X(s) has no zero in the finite s-plane and one zero at infinity. (c) The given Laplace transform may be written as22(1)(1)()1(1)s s s X s s s s -++==-++Clearly ,X (s )has a zero at s=1.since in X(s) the order of the numerator polynomial exceeds the order of the denominator polynomial by 1,X(s) has zeros at ∞ .therefore , X(s) has one zero in the s-plane and no zero at infinity .9.6 (a) No. From property 3 in Section 9.2 we know that for a finite-length signal .the ROC is the entire s-plane .therefore .there can be no poles in the finite s-plane for a finite length signal . Clearly in this problem this not the case.(b) Yes. Since the signal is absolutely integrable, The ROC must include, the j ω-axis . Furthermore ,X(s) has a pole at s=2 .therefore, one valid ROC for the signal would be Re{s}<2. From property 5 in section 9.2 we know that this would correspond to a left-sided signal (C) No . Since the signal is absolutely integrable, The ROC must include , the j ω-axis . Furthermore ,X(s) has a pole at s=2. therefore ,we can never have an ROC of the form Re{s}> α. From property 5 in section 9.2 we knew that x(t) can not be a right-side signal(d) Yes . Since the signal is absolutely integrable, The ROC must include , the j ω-axis . Furthermore ,X(s) has a pole at s=2 .therefore, one valid ROC for the signal could be α<Re{s}<2 such that α<0 .From property 6 in section 9.2 ,we know that this would correspond to a two side signal9.7 We may find different signal with the given Laplace transform by choosing different regions of convergence , the poles of the given Laplace transform are02s =- 13s =- 212s j =- 312s j =-Based on the locations of the locations of these poles , we my choose form the following regions of convergence: (i) Re{s}>- 12(ii)-2< Re{s}<- 12(iii)-3<Re{s}<-2 (iv)Re{s}<-39.8 From Table 9.1,we know thatG(t)= 2()()(2)Lt e x t G s X s ←−→=-. The ROC of G(s) is the ROC of X(s) shifted to the right by 2We are also given that X(s) has exactly 2 poles at s=-1 and s=-3. since G(s)=X(s-2), G(s)also has exactly two poles ,located at s=-1+2=1 and s=-3+2=-1 since we are given G(j ω) exists , we may infer that j ω-axis lies in the ROC of G(s). Given this fact and the locations of thepoles ,we may conclude that g(t) is a two side sequence .Obviously x(t)= 2te g(t) will also be two sided9.9 Using partial fraction expansion X(s)= 4243s s -++Taking the inverse Laplace transform, X(t)=443()2()t t e u t e u t ---9.10 The pole-zero plots for each of the three Laplace transforms is as shown in Figure S9.10(a) form Section 9.4 we knew that the magnitude of the Fourier transform may be expressed aswe se that the right-hand side of the above expression is maximum for ω=0 and decreases asω becomes increasing more positive or more negative . Therefore 1()H j ω is approximatelylowpass(b) From Section 9.4 we know that the magnitude of the Fourier transform may be expressaswe see that the right-hand side of the above expression is zero for ω=0.It thenincreams with increasing |ω| until |ω| reach 1/2. Then it starts decreasing as |ω| increase even further.Therefore | 2H (j )ω| is approximately bandpass.(c) From Section 9.4 we know that the magnitude of the Fourier transform may be expressas2We see that the right-hand side of the above expression is zero for ω=0. It thenincreases with increasing |ω| until |ω| reaches 21. Then |ω| increases,| 3()H j ω|decreases towards a value of 1(because all the vector lengths became almost identical and the ratio become 1) .Therefore |3()H j ω| is approximately highpass.9.11 X(s) has poles ats=1-2and 1-2.X(s) has zeros ats=12and1ω)| is(Length of vector form ω to -1)(Length of vector form ω to 111(Length of vector from toto 22ωωThe terms in the numerator and denominator of the right-band side of above expressioncancel our giving us |X(j ω)|=1.9.12 (a) If X(s) has only one pole, then x(t) would be of the form A ate -.Clearly such a signal violates condition 2. Therefore , this statement is inconsistent with the given information.(b) If X(s) has only two poles, then x(t) would be of the form A 0sin()atet ω- .Clearlysuch a signal could be made to satisfy all three conditions(Example:0ω=80π,α=19200).Therefore, this statement is consistent with the given information. (c) If X(s) has more than two poles (say 4 poles), then x(t) could be assumed to be of the form 00sin()sin()atbt Aet Be t ωω--+. Clearly such a signal could still be made tosatisfy all three conditions. Therefore, this statement is consistent with the given information.9.13 We have1}Re{,1)(->+=s s s X β.Also,1}Re{1),()()(<<--+=s s X s X s G αTherefore, ].11[)(2s s s s G -++-=ααβComparing with the given equation for G(s), ,1-=α .21=β9.14. Since X(s) has 4 poles and no zero in the finite s-plane, we many assume that X(s) is of the form.))()()(()(d s c s b s a s As X ----=Since x(t) is real ,the poles of X(s) must occur in conjugate reciprocal pairs. Therefore, we may assume that b=*a and d=*c . This result in .))()()(()(**c s c s a s a s As X ----=Since the signal x (t) is also even , the Laplace transform X(s) must also be even . This implies that the poles have to be symmetric about the j ω-axis. Therefore, we may assume that c=*a -. This results in .))()()(()(**a S a s a s a s As X ++--=We are given that the location of one of the poles is (1/2)4πj e . If we assume that this pole is a, we have 4444AX(s)=.1111(s-)(s-)(s+)(s+)2222j j j j e e e e ππππ--This gives us22().11()()44AX s s s s s =Also ,we are give that ()(0)4x t dt X ∞-∞==⎰Substituting in the above expression for X(s), we have A=1/4. Therefore,221/4().11()()44X s s s s s =9.15. Taking the Laplace transform of both sides of the two differential equations, wes X(s)=1)(2+-s Y and s Y(s)=2X(s) . Solving for X(s) and Y(s), we obtain 4)(2+=s s s X and Y(s)= 22s 4+.The region of convergence for both X(s) and Y(s) is Re{s}>0 because both are right-handsignals.9.16. Taking the Laplace transform of both sides of the given differential equations ,we obtain).(])1()1()[(223s X s s s s Y =+++++αααα therefore,.)1()1(1)()()(223αααα+++++==s s s s X s Y s H(a) Taking the Laplace transform of both sides of the given equation, we haveG(s) = s H(s)+ H(s). Substituting for H(s) from above,.1)1()1()1()(22223αααααα++=++++++=s s s s s s s GTherefore, G(s) has 2 poles.(b) we know thatH(s) =.))(1(122αα+++s s s Therefore, H(s) has poles at and j ),2321(,1+--α ).2321(j --α If the system has to bestable, then the real part of the poles has to be less than zero. For this to be true, we require that ,02/<-α i.e.,0>α.9.17 The overall system show in Figure 9.17 may be treated as two feedback system of the form shown in figure 9.31 connected in parallel. By carrying out an analysis similar to that described in Section 9.8.1, we find the system function of the upper feedback system to be.82)/2(41/2)(1+=+=s s s s HSimilarly, the system function of the lower feedback system is .21)2/1(21/1)(2+=+=s s s HThe system function of the overall system is now .1610123)()()(221+++=+=s s s s H s H s HSince H(s)=Y(s)/X(s), we may write]123)[(]1610)[(2+=++s s X s s s Y . Taking the inverse Laplace transform, we obtaindtt dx t x t y dt t dy dt t y d )(3)(12)(16)(10)(2+=++9.18. ( a) From problem 3.20, we know that differential equation relating the input and output of the RLC circuit is2()()()().d y t dy t y t x t dtdt++=Taking the Laplace transform of this (while nothing that the system is causal and stable), we obtain2()[1]().Y s s s X s ++= Therefore ,2()1(),()1Y s H s X s s s ==++ 1{}.e s ℜ>-(b) We note that H(s) has twopoles at 12s =--12s =-+zeros in thefinite s-plane. From Section 9.4 we know that the magnitude of the Fourier transform maybe expressed asWe see that the right hand side of the above expression Increases with increasing|ω| until |ω| reaches 12. Then it starts decreasing as |ω| increasing even further. It finally reaches 0 for |ω|=∞. Therefore 2|()|H j ω is approximately lowpass. (c) By repeating the analysis carried out in Problem 3.20 and part (a) of this problem with R =310-Ω, we can show that2()1(),()1Y s H s X s s s ==++ {}0.0005.e s ℜ>-(d) We haveWe see that when |ω| is in he vicinity 0.0005, the right-hand side of the aboveequation takes on extremely large value. On either side of this value of |ω| the value of |H (j ω)| rolls off rapidly. Therefore, H(s) may be considered to be approximately bandpass.9.19. (a) The unilateral Laplace transform isX(s) = 20(1)t st e u t e dt -∞--+⎰= 20t st e e dt -∞--⎰=21+s {} 2.e s ℜ>- (b) The unilateral Laplace transform is2(3)0()[(1)()(1)]t st X s t t e u t e dt δδ-∞-+-=++++⎰2(3)0[()]t st t e e dt δ-∞-+-=+⎰612e s -=++ {} 2.e s ℜ>- (c) The unilateral Laplace transform is240()[()()]t t st X s e u t e u t e dt -∞---=⎰240[]t t st e e e dt -∞---=+⎰1124s s =+++ {} 2.e s ℜ>- 9.20. In Problem 3.29, we know that the input of the RL circuit are related by ).()()(t x t y dtt dy =+Applying the unilateral Laplace transform to this equation, we have ).()()0()(s x s y y s sy =+--(a) For the zero-state response, set (0)0y -=.Also we have u s x =)(L{)(2t u et-}=21+s .Therefore,y(s)(s+1)=.21+sComputing the partial fraction expansion of the right-hand side of the above equation and then taking its inverse unilateral Laplace transform, we have(b) For the zero-state response, assume that x(t) = 0.Since we are given that (0)1y -=,.11)(0)(1)(+=⇒=+-s s y s y s syTaking the inverse unilateral Laplace transform, we have ()().t y t e u t -=Figure S9.21(c) The total response is the sum of the zero-state and zero-input response. This is 2()2()().t t y t e u t e u t --=-9.21. The pole zero plots for all the subparts are shown in figure S9.21. (a) The Laplace transform of x(t) is X(s)= 230()t t st e e e dt ∞---+⎰= (2)(3)00[/(2)]|[/(3)]|s t s te s e s -+∞-+∞-++-+ = 211252356s s s s s ++=++++(b) Using an approach similar to that show in part (a), we have41(),4L t e u t s -←−→+ {} 4.e s ℜ>-Also,551(),55L t j t e e u t s j -←−→+-{}5e s ℜ>-. and(){}551,555LT t j t e e u t e s s j --←−→ℜ>-++.From this we obtain()()()()55555215sin 52525LTt t j t t j t e t u t e e e e u t js ----⎡⎤=-←−→⎣⎦++ ,where {}5e s ℜ>- .Therefore, ()()(){}245321570sin 5,51490100LTt t s s e u t e t u t e s s s s --+++←−→ℜ>-+++. (c)The Laplace transform of ()x t is ()()023t t st X s e e e dt --∞=+⎰()()()()2300/2|/3|s t s t e s e s ----∞-∞⎡⎤⎡⎤=--+--⎣⎦⎣⎦ 211252356s s s s s -=+=---+.The region of convergence (ROC) is {}2e s ℜ<.(d)Using an approach along the lines of part (a),we obtain(){}21,22LT t e u t e s s -←−→ℜ>-+. (S9.21-1) Using an approach along the lines of part (c) ,we obtain(){}21,22LT t e u t e s s -←−→ℜ<-. (S9.21-2)R b Im()()222224t LT t t s e e u t e u t s --=+-←−→-, {}22e s -<ℜ<. Using the differentiation in the s-domain property , we obtain(){}22222228,2244t LT d s s te e s ds s s -+⎡⎤←−→-=--<ℜ<⎢⎥-⎣⎦-. (e)Using the differentiation in the s-domain property on eq.(S9.21-1),we get()(){}2211,222LT t d te u t e s ds s s -⎡⎤←−→-=ℜ>-⎢⎥+⎣⎦+.Using the differentiation in the s-domain property on eq (S9.21-2),we get ()(){}2211,222LT t d te u t e s ds s s ⎡⎤--←−→=-ℜ<⎢⎥-⎣⎦-.Therefore,()()()(){}222224,2222t LT t t st e te u t te u t e s s s ---=--←−→-<ℜ<+-.(f)From the previous part ,we have()()(){}2221,22LT t t t e u t te u t e s s -=--←−→-ℜ<-.(g)Note that the given signal may be written as ()()()1x t u t u t =-- .Note that (){}1,0LTu t e s s←−→ℜ>.Using the time shifting property ,we get(){}1,0s LT e u t e s s--←−→ℜ>.Therefore , ()1x t()()11,sLT e u t u t s----←−→ All s . Note that in this case ,since the signal is finite duration ,the ROC is the entire s-plane. (h)Consider the signal ()()()11x t t u t u t =--⎡⎤⎣⎦.Note that the signal ()x t may beexpressed as ()()()112x t x t x t =+-+ . We have from the previous part()()11sLT e u t u t s----←−→, All s . Using the differentiation in s-domain property ,we have()()()12111s s s LT d e se e x t t u t u t ds s s---⎡⎤--+=--←−→=⎡⎤⎢⎥⎣⎦⎣⎦, All s . Using the time-scaling property ,we obtain()121s s LT se e x t s --+-←−→, All s . Then ,using the shift property ,we have()21212s s LT sse e x t e s ---+-+←−→ ,All s . Therefore ,()()()21122112s s s sLTs se e se e x t x t x t es s ----+--+=+-+←−→+, All s. (i) The Laplace transform of ()()()x t t u t δ=+ is (){}11/,0X s s e s =+ℜ>.(j) Note that ()()()()33t u t t u t δδ+=+.Therefore ,the Laplace transform is the same as the result of the previous part. 9.22 (a)From Table 9.2,we have ()()()1sin 3x t t u t =.(b)From Table 9.2 we know that()(){}2cos 3,09LT st u t e s s ←−→ℜ>+. Using the time scaling property ,we obtain()(){}2cos 3,09LT s t u t e s s -←−→-ℜ<+Therefore ,the inverse Laplace transform of ()X s is ()()()cos 3x t t u t =--.(c)From Table 9.2 we know that()()(){}21cos 3,119LTt s e t u t e s s -←−→ℜ>-+. Using the time scaling property ,we obtain ()()(){}21cos 3,119LTt s e t u t e s s -+-←−→-ℜ<-++. Therefore ,the inverse Laplace transform of ()X s is ()()()cos 3t x t e t u t -=--.(d)Using partial fraction expansion on ()X s ,we obtain ()2143X s s s =-++ . From the given ROC ,we know that ()x t must be a two-sided signal .Therefore ()()()432t t x t e u t e u t --=+-.(e)Using partial fraction expansion on ()X s ,we obtain ()2132X s s s =-++. From the given ROC ,we know that ()x t must be a two-sided signal ,Therefore,()()()332ttx t e u t e u t --=+-.(f)We may rewrite ()X s as ()2311s X s s s =+-+ ()()22311/22ss =+-+1=+Using Table 9.2 ,we obtain()())())()/2/23cos/2sin/2t t x t t e u t u t δ--=+.(g)We may rewrite ()X s as()()2311sX s s =-+.From Table 9.2,we know that(){}21,0LT tu t e s s ←−→ℜ>.Using the shifting property ,we obtain()(){}21,11LT t e tu t e s s -←−→ℜ>-+.Using the differentiation property ,()()()(){}2,11LT t t t d s e tu t e u t te u t e s dt s ---⎡⎤=-←−→ℜ>-⎣⎦+.()()()()33t t x t t e u t te u t δ--=--.9.23.The four pole-zero plots shown may have the following possible ROCs:·Plot (a): {}2e s ℜ<- or {}22e s -<ℜ< or {}2e s ℜ>. ·Plot (b): {}2e s ℜ<- or {}2e s ℜ>-. ·Plot (c): {}2e s ℜ< or {}2e s ℜ>. ·Plot (d): Entire s-plane.Also, suppose that the signal ()x t has a Laplace transform ()X s with ROC R . (1).We know from Table 9.1 that ()()33LTt e x t X s -←−→+.The ROC 1R of this new Laplace transform is R shifted by 3 to the left .If ()3t x t e - is absolutely integrable, then 1R must include the jw -axis. ·For plot (a), this is possible only if R was {}2e s ℜ> . ·For plot (b), this is possible only if R was {}2e s ℜ>-. ·For plot (c), this is possible only if R was {}2e s ℜ> . ·For plot (d),R is the entire s-plane. (2)We know from Table 9.2 that(){}1,11LT t e u t e s s -←−→ℜ>-+.Also ,from Table 9.1 we obtain()()(){}2,11LT t X s x t e u t R R e s s -⎡⎤*←−→=ℜ>-⎡⎤⎣⎦⎣⎦+I If ()()t e u t x t -*is absolutely integrable, then 2R must include the jw -axis. ·For plot (a), this is possible only if R was {}22e s -<ℜ<. ·For plot (b), this is possible only if R was {}2e s ℜ>-. ·For plot (c), this is possible only if R was {}2e s ℜ< . ·For plot (d),R is the entire s-plane.(3)If ()0x t = for 1t > ,then the signal is a left-sided signal or a finite-duration signal .·For plot (a), this is possible only if R was {}2e s ℜ<-. ·For plot (b), this is possible only if R was {}2e s ℜ<-. ·For plot (c), this is possible only if R was {}2e s ℜ< . ·For plot (d),R is the entire s-plane.(4)If ()0x t =for 1t <-,then the signal is a right-sided signal or a finite-duration signal·For plot (a), this is possible only if R was {}2e s ℜ>. ·For plot (b), this is possible only if R was {}2e s ℜ>- . ·For plot (c), this is possible only if R was {}2e s ℜ>.·For plot (d),R is the entire s-plane.9.24.(a)The pole-zero diagram with the appropriate markings is shown Figure S9.24. (b)By inspecting the pole-zero diagram of part (a), it is clear that the pole-zero diagram shown in Figure S9.24 will also result in the same ()X jw .This would correspond to the Laplace()112X s s =-, {}12e s ℜ<.(c)≮()X jw π=-≮()1X jw .(d)()2X s with the pole-zero diagram shown below in Figure S9.24 would have the property that ≮()2X jw =≮()X jw .Here , ()211/2X s s -=-. (e) ()()21/X jw X jw =.(f)From the result of part (b),it is clear that ()1X s may be obtained by reflecting the poles and zeros in the right-half of the s-plane to the left-half of the s-plane .Therefore,()11/22s X s s +=+.From part (d),it is clear that ()2X s may be obtained by reflecting the poles (zeros) in the right-half of the s-plane to the left-half and simultaneously changing them to zeros (poles).Therefore, ()()()()2211/22s X s s s +=++ 9.25.The plots are as shown in Figure S9.25. 9.26.From Table 9.2 we have()()(){}2111,22LT t x t e u t X s e s s -=←−→=ℜ>-+and()()(){}3111,33LTt x t e u t X s e s s -=←−→=ℜ>-+.Using the time-shifting time-scaling properties from Table 9.1,we obtain()(){}22112,22s LT s e x t e X s e s s ---←−→=ℜ>-+and()(){}33223,33s LT s e x t e X s e s s---+←−→-=ℜ>--.Therefore, using the convolution property we obtain()()()()23122323s s LTe e y t x t x t Y s s s --⎡⎤⎡⎤=-*-+←−→=⎢⎥⎢⎥+-⎣⎦⎣⎦. 9.27.From clues 1 and 2,we know that ()X s is of the form()()()AX s s a s b =++.Furthermore , we are given that one of the poles of ()X s is 1j -+.Since ()x t is real, the poles of ()X s must occur in conjugate reciprocal pairs .Therefore, 1a j =-and 1b j =+ and()()()11AH s s j s j =+-++.From clue 5,we know that ()08X =.Therefore, we may deduce that 16A = and ()21622H s s s =++ .Let R denote the ROC of ()X s .From the pole locations we know that there are two possible choices of R .R may either be {}1e s ℜ<-or {}1e s ℜ>-.We will now use clue 4 to pick one .Note that()()()()22LTt y t e x t Y s X s =←−→=-.The ROC of ()Y s is R shifted by 2 to the right .Since it is given that ()y t is not absolutelyintegrable ,the ROC of ()Y s should not include the jw axis -.This is possible only ofR is {}1e s ℜ>-.9.28.(a) The possible ROCs are(i) {}2e s ℜ<-.(ii) {}21e s -<ℜ<-. (iii) {}11e s -<ℜ<. ( iv) {}1e s ℜ>.(b)(i)Unstable and anticausal. (ii) Unstable and non causal. (iii )Stable and non causal. (iv) Unstable and causal. 9.29.(a)Using Table 9.2,we obtain (){}1,11X s e s s =ℜ>-+and(){}1, 2.2H s e s s =ℜ>-+(b) Since ()()()y t x t h t =*,we may use the convolution property to obtain()()()()()112Y s X s H s s s ==++.The ROC of ()Y s is {}1e s ℜ>-.(c) Performing partial fraction expansion on ()Y s ,we obtain . ()1112Y s s s =-++.Taking the inverse Laplace transform, we get()()()2t t y t e u t e u t --=-. (d)Explicit convolution of ()x t and ()h t gives us()()()y t h x t d τττ∞-∞=-⎰()()20t e e u t d ττττ∞---=-⎰t t e e d ττ--=⎰ for 0t>()2.t t e e u t --⎡⎤=-⎣⎦ 9.30.For the input ()()x t u t =, the Laplace transform is (){}1,0.X s e s s=ℜ>The corresponding output ()()1t t y t e te u t --⎡⎤=--⎣⎦has the Laplace transform()()(){}221111,0111Y s e s s s s s s =--=ℜ>+++. Therefore,()()()(){}21,0.1Y s H s e s X s s ==ℜ>+ Now ,the output ()()3123t t y t e e u t --⎡⎤=-+⎣⎦has the Laplace transform ()()(){}12316,0.1313Y s e s ss s s s s =-+=ℜ>++++ Therefore , the Laplace transform of the corresponding input will be()()()()(){}1161,0.3Y s s X s e s H s s s +==ℜ>+Taking the inverse Laplace transform of the partial fraction expansion of ()1,X s we obtain()()()3124.t x t u t e u t -=+9.31.(a).Taking the Laplace transform of both sides of the given differential equation andsimplifying, we obtain()()()212Y s H s X s s s ==--.b).The partial fraction expansion of ()H s is()1/31/321H s s s =--+. (i).If the system is stable ,the ROC for ()H s has to be {}12e s -<ℜ< . Therefore ()()()21133t t h t e u t e u t -=---.(ii).If the system is causal, the ROC for ()H s has to be {}2e s ℜ> .Therefore()()()21133t t h t e u t e u t -=-.(iii)If the system is neither stable nor causal ,the ROC for ()H s has to be {}1e s ℜ<-. Therefore ,()()()21133t t h t e u t e u t -=--+-9.32. If ()2t x t e =produces ()()21/6t y t e =,then ()()21/6H =. Also, by taking the Laplace transform of both sides of the given differential equation we get ()()()()442s b s H s s s s ++=++.Since ()21/6H = ,we may deduce that 1b = .Therefore()()()()()222424s H s s s s s s +==+++. 9.33.Since ()()()t t t x t e e u t e u t --==+-, ()()(){}112,111111Xs e s s s s s -=-=-<ℜ<+-+-. We are also given that ()2122s H s s s +=++.Since the poles of ()H s are at 1j -±, and since ()h t is causal ,we may conclude that the ROC of ()H s is {}1e s ℜ>-.Now()()()()()22221Y s H s X s s s s -==++-. The ROC of ()Y s will be the intersection of the ROCs of ()X s and ()H s .This is {}11e s -<ℜ<.We may obtain the following partial fraction expansion for ()Y s : ()22/52/56/5122s Ys s s s +=-+-++. We may rewrite this as()()()222/521411551111s Y s s s s ⎡⎤⎡⎤+=-++⎢⎥⎢⎥-++++⎢⎥⎢⎥⎣⎦⎣⎦. Nothing that the ROC of ()Y s is {}11e s -<ℜ<and using Table9.2,we obtain()()()()224cos sin 555t t t y t e u t e tu t e tu t --=-++9.34.We know that()()(){}111,0LTx t u t X s e s s=←−→=ℜ> Therefore, ()1X s has a pole at 0s =.Now ,the Laplace transform of the output ()1y t of thesystem with ()1x t as the input is ()()()11Y s H s X s =Since in clue 2, ()1Y s is given to be absolutely integrable ,()H s must have a zero at0s =which cancels out the pole of ()1X s at 0s =.We also know that()()(){}2221,0LT x t tu t X s e s s=←−→=ℜ> Therefore , ()2x s has two poles at 0s =.Now ,the Laplace transform of the output ()2y t of the system with ()2x t as the input is()()()22Y s H s X s =Since in clue 3, ()2Y s is given to be not absolutely integrable ,()H s does not have two zerosat 0s =.Therefore ,we conclude that ()H s has exactly one zero at 0s =. From clue 4 we know that the signal ()()()()2222d h t dh t p t h t dt dt=++is finite duration .Taking the Laplace transform of both sides of the above equation ,weget()()()()222P s s H s sH s H s =++. Therefore,()()222P s H s s s =++.Since ()p t is of finite duration, we know that ()P s will have no poles in the finite s-plane.Therefore, ()H s is of the form ()()1222Ni i A s z H s s s =-=++∏,where i z ,1,2,....,i N =represent the zeros of ()P s .Here ,A is some constant.From clue 5 we know that the denominator polynomial of ()H s has to have a degree which is exactly one greater than the degree of the numerator polynomial .Therefore, ()()1222A s s H s s s -=++.Since we already know that ()H s has a zero at 0s = ,we may rewrite this as()222As H s s s =++ From clue 1 we know that ()1H is 0.2.From this ,we may easily show that 1A = .Therefore, ()222s H s s s =++.Since the poles of ()H s are at 1j -± and since ()h t is causal and stable ,the ROC of()H s is {}1e s ℜ>-.。
信号与系统:Chapter9拉普拉斯反变换
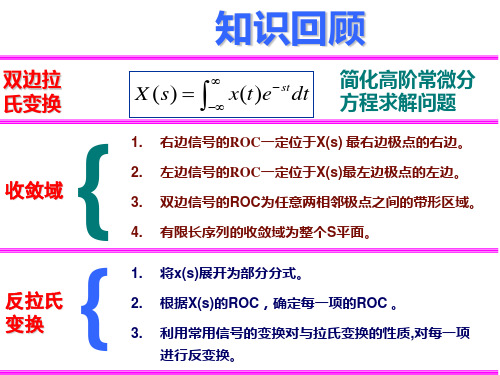
{1.
反拉氏
2.
变换
3.
将x(s)展开为部分分式。 根据X(s)的ROC,确定每一项的ROC 。 利用常用信号的变换对与拉氏变换的性质,对每一项 进行反变换。
双边拉氏变换性质回顾
性质
公式
条件(收敛域)
线性 ax1(t) bx2 (t) aX1(s) bX 2 (s) ROC : 包括 R1 R2
s1u(t)
s
1 est 1
s2 u(t)
etu(t) e2tu(t)
9. 3 拉普拉斯反变换
例4. 求下列函数的反变换 X (s) 10(s 2)(s 5) ,Re{s} 0
s(s 1)(s 3)
解:将X(s)写成部分分式展开形式
X (s) c1 c2 c3 s s 1 s 3
随着 , H趋( j向)于 。 / 2 则 H ( j趋)向于 。/ 2
H ( j)
1/
1/
9.4 由零极点图对傅里叶变换几何求值
例2. 全通系统:
考查零极点对称分布的系统 H (s) s a (一阶全通系统) sa
❖ 该系统的 H( 在j)任何时候都等于1,所以 称为全通系统。
j
j
1
a
9. 3 拉普拉斯反变换
例6. 求以下函数的拉氏反变换
X (s) s 2
Re{s} 0
s(s 1)3
解:将 X (s)写成展开式
X (s) k11 k12 k13 k2 (s 1)3 (s 1)2 (s 1) s
k2 sX (s) |s0 2
令
X1
(s)
(s
1)3
X
(S)
D(s)
于D(s)的阶次,即m<n 。如果不满足此条件,不可 以按上面方法展开成部分分式。对于m≥n的情况, 可先用长除法将分子中的高次项提出,余下的部分 满足m<n,仍按以上方法分析。
奥本海姆信号与系统中文版课后习题答案

1.对一个LTI 系统,我们已知如下信息:输入信号2()4()tx t e u t =-;输出响应22()()()t t y t e u t e u t -=-+(a) 确定系统的系统函数H(s)及收敛域。
(b) 求系统的单位冲激响应h(t)(c) 如果输入信号x(t)为(),tx t e t -=-∞<<+∞ 求输出y(t)。
解:(a)4114(),Re{}2,(),2Re{}2222(2)(2)X s s Y s s s s s s s ---=<=+=<-<--+-+1(),Re{}22H s s s =>-+(b)2()()t h t e u t -= (c)()2()()t ty t e e u d e τ+∞---τ--∞=ττ=⎰; ()(1)t ty t H e e --=-=.2. 已知因果全通系统的系统函数1()1s H s s -=+,输出信号2()()ty t e u t -=(a) 求产生此输出的输入信号x(t). (b) 若已知dt ∞∞<∞⎰+-|x(t)|,求输出信号x(t).(c) 已知一稳定系统当输入为2()te u t -时,输出为上述x(t)中的一个,确定是哪个?求出系统的单位冲激响应h(t).解:(a)1()2Y s s =+。
Re{}2s >-,()1()()(1)(2)Y s s X s H s s s +==-+ 由于()H s 的ROC 为Re{}1s >-,()X s ∴的ROC 为2Re{}1s -<<或Re{}1s >若 1ROC 为-2<Re{s}<1,则2112()()()33t tx t e u t e u t -=--若2ROC 为Re{s}>1,221()(2)()3t t x t e e u t -=+(b) 若 dt ∞∞<∞⎰+-|x(t)|,则只能是1()()x t x t =即:212()()()33t t x t e u t e u t -=--(c)212()()()()33t ty t x t e u t e u t-==--;1(),2Re{}1(1)(2)sY s ss s+=-<<-+()1()()1Y s sH sX s s+∴==-, 这就是(a)中系统的逆系统。
信号与系统奥本海姆第二版答案

Systems(Second Edition) —Learning Instructions (Exercises Answers) Department ComputerEngineering 2005.12 ContentsChapter 17Chapter 35Chapter 62Chapter 83Chapter 109Chapter 119Chapter 132Chapter 140Chapter 10 160 Answers1.1 Converting from polar Cartesiancoordinates: 1.2converting from Cartesian polarcoordinates: limlim dtdt =cos(t).Therefore, limlim dtdt limlim limcos shiftedsignal shiftedsignal flippedsignal flippedsignal newSignal flippedsignal newsignal flippedsignal right.Therefore, weknow t>-2.Similarly, x(2-t) t>-1,Therefore, (1-t)+x(2-t) linearlycompression Therefore,x(3t) linearlycompression Therefore,x(3t) periodicbecause fundamentalperiod FigureS1.6. Therefore, fundamentalperiod oddsignal, allvalues zerowhen zeroonly when periodiccomplex exponential. 10 10 complexexponential multiplied decayingexponential. Therefore, periodicsignal. complexexponential fundamentalperiod periodicsignal. fundamentalperiod Weobtain fundamentalperiod complexexponential =3/5.We cannot find any integer integer.Therefore, periodic.1.10. x(t)=2cos(10t+1)-sin(4t-1) Period firstterm firstterm overallsignal periodwhich leastcommon multiple secondterms. -3-1 -1-2 -3 -3-3 firstterm secondterm secondtermoverallsignal periodwhich leastcommon Multiple threeterms inn 35.1.12. figureS1.12. flippedsignal right.Therefore, no=-3.1.13 itsderivative FigureS1.14. Therefore [n-3]=2x [n-2]+4x [n-3]+4x [n-4])=2x [n-2]+5x input-outputrelationship y[n]=2x[n-2]+5x [n-3] 2x[n-4] input-outputrelationship does connectedseries reversed. Wecan easily prove [n-3])+4(x input-outputrelationship onceagain y[n]=2x[n-2]+ 5x [n-3] 2x[n-4] 1.16 memoryless because pastvalues wemay conclude systemoutput alwayszero causalbecause sometime may depend futurevalues Considertwo arbitrary inputs (sin(t))Let linearcombination arbitraryscalars givensystem correspondingoutput linear.1.18.(a) Consider two arbitrary inputs linearcombination arbitraryscalars. givensystem, correspondingoutput arbitraryinput correspondingoutput .Consider secondinput outputcorresponding Alsonote +1)B.Therefore +1)B.1.19 Considertwo arbitrary inputs (t-1)Let linearcombination arbitraryscalars. givensystem, correspondingoutput linear.(ii) Consider arbitraryinputs correspondingoutput .Consider secondinput outputcorresponding Alsonote Considertwo arbitrary inputs [n-2].Let linearcombination arbitraryscalars. givensystem, correspondingoutput linear.(ii) Considerarbitraryinput correspondingoutput .Consider secondinput outputcorresponding Alsonote Considertwo arbitrary inputs -1]Let linearcombination arbitraryscalars. givensystem, correspondingoutput linear.(ii) Consider arbitraryinput correspondingoutput .Consider secondinput outputcorresponding Alsonote Considertwo arbitrary inputs linearcombination arbitraryscalars. givensystem, correspondingoutput linear.(ii) Consider arbitraryinputs correspondingoutput .Consider secondinput outputcorresponding Alsonote systemliner Thereforex1 weknow x2(t)=cos(2(t-1/2))= linearityproperty, we may once again write x1 cos(3t-1)Therefore, x1 (t)=cos(2(t-1/2)) =cos(3t-1)1.21.The signals figureS1.21. Figure S1.21 1.22 figureS1.22 1.23 oddparts FigureS1.23 1/2-1/2 -1 0.50.5 3/2-3/2 x(2t+1)x(4-t/2) 1012 1/2-1/2 -1 1/2-1/2 1/2-1 -2 1/2-1 -2 1/2-1 -2 FigureS1.22 -4-1 -2 -7xo[n] 3t/2-3t/2 -1/2-7 FigureS1.24 -2 FigureS1.23 1/2 1/2-7 1/2-1 3/2-3/2 -1/2 101.24 oddparts FigureS1.24。
信号与系统奥本海姆第九章答案

s s s s H , Re{s}>-1 ∴ )(6)()()()(2)(2222t x dt t dx dt t x d t y dt t dy dt t y d ??=++ (b) It’s obviouse that this system is stable.
文档之家的所有文档均为用户上传分享文档之家仅负责分类整理如有任何问题可通过上方投诉通道反馈
信号与系统奥本海姆第九章答案
Chapter 9 9.21 Solution: (a). Q
)()()(32t u e t u e t x t t ??+= ∴ )3)(2(523121)(+++=+++=s s s s s s X , 2}Re{?>s (b). Q )()5(sin )()(54t u t e t u e t x t t ??+= ∴
13/123/1)1)(2(121)()()(2+?+?=+?=??==s s s s s s s X s Y s H (b). 1. The system is stable. ∴ ROC: (-1,2) ∴ )()()(31231t u e t u e t h t t ????= 2. The system is causal. ∴ ROC: ),2(+∞ ∴ )()()(31231t u e t u e t h t t ??= 3. The system is neither stable nor causal ∴ ROC: )1,(??∞ ∴ ) ()()(31231t u e t u e t h t t ?+??=? 9.32. Solution: from (1) Q t e t x 2)(=, for all t and x(t) is a eigen function ∴ t t s e e s H t y 2226 1|)()(=?== ∴ 61|)(2==s s H from (2) Q )()()()(2)(4t bu t u e t h dt t dh t +=+? ∴ s b s s h s sH ++=+41)(2)( ∴ ) 2)(4()4()(++++=s s s s b s s H when 2=s , 6146262)2(=××+= b h ∴ 862=+b ,1=b ∴ 0}Re{,........) 4(2)2)(4()2(2)(>+=+++=s s s s s s s s H 9.33. Solution: Q )()()(||t u e t u e e t x t t t ?+==?? ∴ ) 1)(1(21111)(?+?=??+=s s s s s X ∴ )()()(s H s X s Y =2 21)1)(1(22+++??+?= s s s s s )22)(1(22++??=s s s ) 22(5652)1(522++++??=s s s s 1)1(541)1()1(52)1(521)1(54)1(52)1(52222+++++++??=+++++??=s s s s s s s ∴ )(sin 5 4)(cos 52)(52)(t tu e t tu e t u e t h t t t ??++?= 9.35. Solution: According to the block-diagram, we will know (a) 126121611)(2222++??=++??=s s s s s
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第九章
9.6 解:
(a) 若是有限持续期信号Roc 为整个s 平面,故存在极点不可能,故不可能为有限持续期。
(b) 可能是左边的。
(c) 不可能是右边的,若是右边信号,它并不是绝对可积的。
(d) x(t)可能为双边的。
9.8 解:
因为t e t x t g 2)()(=的傅氏变换,)(ωj G 收敛
所以)(t x 绝对可积
若)(t x 为左边或者右边信号,则)(t x 不绝对可积
故)(t x 为双边信号
9.10 解:
(a) 低通
(b) 带通
(c) 高通
9.14 解:
dt e t x s X st ⎰
∞
∞--=
)()(, 由)(t x 是偶函数可得)()()(t d e t x s X st --=
⎰
-∞
∞ dt e t x t s ⎰
∞
∞----=
)()( dt e t x t s ⎰
∞
∞---=
)()( )(s X -=
421πj e s =为极点,故42
1πj e s -=也为极点,由)(t x 是实信号可知其极点成对出现,故421πj e s -=与421π
j e s --=也为极点。
)
21)(21)(21)(21()(4444ππππj j j j e s e s e s e s M
s X --++--= 由
⎰∞
∞-=4)(dt t x 得 4)0(=x
所以,M =1/4 即,4
2}Re{42<<-s 9.21 解: (a) 3121)(+++=
s s s X 2}Re{->s (b) 25
)5(541)(2++++=s s s X 4}R e {
->s (c) 3
121)(----=s s s X 2}R e {
<s (d) 22)
2(1)2(1)(--+=s s s X 2}R e {
2<<-s (e) 2
2)2(1)2(1)(-++-=s s s X 2}R e {
2<<-s (f) 2
)2(1)(-=s s X 2}R e {
<s (g) )1(1)(s e s
s X --= 0}R e {
>s
(h) 22
)1()(s
e s X s -=- 0}R e {
>s (i) s
s X 11)(+= 0}R e {
>s (j) s
s X 131)(+= 0}R e {
>s 9.23 解:
1. Roc 包括 Re{s}=3
2. Roc 包括 Re{s}=0
3. Roc 在最左边极点的左边
4. Roc 在最右边极点的右边
图1:1,2}Re{>s
2,2}Re{2<<-s
3,2}Re{-<s
4,2}Re{>s
图2: 1,2}Re{->s
2,2}Re{->s
3,2}Re{-<s
4,2}Re{->s
图3: 1,2}Re{>s
2,2}Re{<s
3,2}Re{<s
4,2}Re{>s
图4: 1,S 为整个平面
2,S 为整个平面
3,S 为整个平面
4,S 为整个平面
9.25 解:
图略
9.27 解:
)(t x 为实信号,)(s X 有一个极点为j s +-=1
)(s X ∴另一个极点为j s --=1
)
1)(1()(j s j s M s X ++-+=∴ 又 8)0(=X
16=∴M 则,)
1(8)1(8)(j s j j s j s X -+-++= 1}Re{->s 或者1}Re{-<s 之一使其成立
又 )(2t x e t 不是绝对可积的
∴ 对任一个s ,右移2,不一定在Roc 中
因此,1}Re{-<s
9.35 解: (a) )(1)(*)(s X s
t u t x L −→− 那么方框图表示的方程为
)(*)(*)(6)(*)()()(*)(*)()(*)(2)(t u t u t y t u t y t y t u t u t x t u t x t x --=++
即 ⎰⎰⎰⎰⎰⎰∞-∞
-∞-∞-∞-∞---=+
+t t
t t t t dt d y d y t y dt d x d x t x ττττττττ)(6)()()()(2)( 对两边求导可得
)(6)()()()()(2
222t x dt t dx dt t x d t y dt t dy dt t y d --=++ (b) 1
26)(22++--=s s s s s H 121-==s s 是)(s H 的二重极点,由于系统是因果的
所以 1}Re{->s
Roc 包含虚轴,所以系统是稳定的。
9.40 解: (a) 6
1161)(23+++=
s s s s H 41)(+=s s X 4}R e {->s )
4)(6116(1)(23++++=∴s s s s s Y )()2
1216161
()(4321t u e e e e t y t t t t -----+-= (b) )]0()0()([6)0()0()0()(223-----'+++''+'++y sy s Y s y y s y s s Y s
)]0()([11-++y s sY )(6s Y +=0
6
11665)(232+++++-=s s s s s s Y )()(2t u e t y t -=
(c ) S 输出为a,b 之和
即,6
11665)4)(6116(1)(23223+++++-++++=s s s s s s s s s s Y 9.48 解: (a) )
(1)(1s H s H =
(b) 图略
9.65 解: (a) 22000)(21)(23)()(dt
t dV dt t dV t V t V i ++= (b) 3
1)()(3+−→−=-s t u e t V L t i 对方程两边取单边拉氏变换
可得,)23)(3(2235)(220+++++++=
s s s s s s s V 312515+++-+=
s s s )()55()(320t u e e e t v t t t ---+-=∴。