GY-26电子指南针使用手册
电子指南针说明书
摘要早期的指南针采用了磁化指针和方位盘的组合方式,整个指南针从便携性、指示灵敏度上都有一定不足,极易受到外界因素的干扰。
本系统采用专用的磁场传感器结合高速微控制器〔MCU〕的电子指南针能有效解决这些问题。
系统采用了磁阻〔GMR〕传感器采集某一方向磁场强度后通过MCU控制器对其进行处理并显示上传,通过对电子指南针硬件电路和软件程序的分析,阐述了电子指南针基本的工作原理及实现。
实际测试指南针模块精度达到1°,能够在LCD上显示当前方位并能通过键盘控制实现磁场校准,磁偏角补偿,重新设定等功能。
关键词:电子指南针;磁阻传感器;单片机;液晶AbstractSince the early use of amagnetic compass and direction-pointer of the composition, the entire compass from scratch, on the instructions of a certain sensitivity of the defect. Using a dedicated high-speed magnetic sensors with microcontroller <MCU> electronic compass can effectively solve these problems. The system is designed by the reluctance <GMR> sensors collecting a certain direction through the magnetic field strength after the MCU Controller its judgement will be dealt with the results, through the LCD screen display and can be sent to the MCU's top serial Machine. The actual test compass module can reach 1 °, in the LCD display on the current position and through the keyboard control can realize functions like the magnetic field calibration,Magnetic declination, Reset etc.Key words: electronic compass; GMR; MCU; LCD目录摘要I1 引言11.1 课题背景11.2 指南针原理介绍11.3 国外研究现状21.4 本课题研究的意义22 单片机及相关物理量介绍42.1 单片机系统简介42.2 物理量简介72.3 电子指南针的主要偏差及校正93 原理及系统框图133.1 测量原理简介133.2 系统总图框图143.3 系统其他模块简介154 系统硬件244.1 系统控制模块244.2 指南针模块254.3 实时时钟模块264.4 液晶显示电路274.5 系统输入电路285 系统软件305.1 主监控程序305.2 实时时钟驱动315.3 指南针模块驱动325.4 键盘驱动345.5 液晶模块驱动34结论36致37参考文献36附录371 引言1.1 课题背景指南针的发明是我国劳动人民,在长期的实践中对物体磁性认识的结果。
指南针使用手册

指南针使用手册一、使用注意事项指南针务必水平地拿着,而且要远离以下列举的各种物品,才可避免磁针发生错乱:指南针应离铁丝网10米,高压线55米,汽车和飞机20米,以及含有磁铁如磁性容器等10米。
二、指北针使用说明当前给工程部提供的指南针其实是美式军用指北针,如下图,指北针是常用的一种测定方位、距离、水平及测绘简单地图的一种简易测量器材,采用高密封油式阻尼表盘,提高了行进间测量的稳定性,线隙式瞄准机构,便于准确操作,外壳采用了高强度铝合金等轻量化设计,携行方便。
1、外观介绍合起来待用的状态打开后的状态完全打开放平后带刻度的边缘部分,是1:25000M的坐标梯尺,可以在相同比例的地图上直接量测直线距离,同时是几何方法图上作业的得力工具,如下图:阻尼表盘有利于指针的稳定性,更加适合运动、崎岖的环境,箭头表示N极(北极),这也是绝大多数指北针的标注方法:可以转动的方位表牌,通过一个片状卡簧和表牌的齿状边缘卡紧和定位方位表牌上有一个放大镜,可以更清楚地看到方位,不要小看这一长一短两条刻线,很多功能都要通过它实现:阻尼表盘内圈的刻度为360度方位角度分划,外圈的刻度为64-00密位制分划,密位分划是军事上常用的方位角计量单位,美国和原北约国家的标准是64-00制,我国和原华约国家的标准是60-00制,根据不同的密位制相应的1密位换算为角度=360/密位制(度),美式64-00密位制指北针1密位=360/6400=0.05625(度),我国的97型指北针采用的为60-00密位制,1密位=360/6000=0.06(度)。
2、使用方法(1)确定北方:正确的方法是这样的,在手掌中端平,箭头(N极)所指的就是北方:(2)校正地图:校正地图的方向很简单,但这是一切图上作业的基础:把地图放平,然后将地图上的指北标与指北针上的N极(箭头)对正,就校正了地图方向,一般情况下地图都是上北下南绘制的。
(3)测量方位:利用这个小透镜和表壳上的金属丝配合使用,可以更精确的测量方位角,透镜上方的小缝可以使你更准确地定位金属丝,具体的方法是从小透镜通过指北针狭缝中的细金属丝瞄准目标,然后转动方位表牌使长线对准卡簧尖,然后从方位表牌的透镜中读角度,即方位线与正北的夹角角度。
军用指南针的详细说明书

军用指南针的详细说明书[图]作者:未知转贴自:新华网河北频道点击数:396 更新时间:2007-2-6军用指南针说明书一、用途六.二式罗盘仪是测定方位、距离、水平、坡度(俯仰角度)、高度、行军间速度及测绘简单地图的一种简易测量器材,为便于夜间使用,在其各相应部位上涂有夜光粉。
二、结构简单介绍仪器主要由罗盘、里程计两部分构成。
罗盘部分有提环(l),度盘座(2),在度盘座上划有两种刻线、外圈为360度分划制,每刻线为1度。
内圈为6000(密位)分划制,圆周共刻300刻线.每刻线线值为20(密位),内有磁针(3),测角器(4),俯仰角度的分划单位为度.每刻线为25度.可测量俯仰角度士60度。
里程计部分主要由里程分划表、速度时间表(8)、测轮(9)、齿轮指针等组成。
里程分划有l:50000,l:100000两种比例尺刻度值。
1:100000比例尺每刻线相应代表1公里。
l:50000每刻线相应代表0.5公里.可与具有相应比例或成倍比例的地图配合使用。
速度时间表分划有外侧表盘上有13、15、17、19、21、23、25公里/小时,内侧表盘上有10、14、16、18、20、22、2 4、30公里/小时。
(以V代表),共15种速度。
时间刻度中每一刻线相应代表5分钟(V25为10分钟)。
仪器的侧面有测绘尺,两端为距离估定器。
估定器两尖端长1 2.3毫米,照准与准星间长为123毫米.即为尖端长的10倍。
三、使用方法(一)测定方位1、测定现地东南西北方向(1)打开罗盘仪.使方位指标“△”对准“〇”;(2)转动罗盘仪.待磁针指北端对准“〇”后,此时所指的方向就是北方,在方位玻璃上就可直接读出现地东、南、西、北方向。
2、标定地图方位标定地图方位就是利用罗盘,使地图上的方位和现地方位一致(1)打开仪器,调整度盘座,使方位指标“△”对准本地区的磁偏角度数;(2)以测绘尺与地图上的真子午线或座标纵线(即东、西图廓的内图廓线)相切;(3)转动地图,使磁针北端指向“O’”,则地图上的方位和现地方位完全一致。
GY-26电子指南针使用手册

GY-26电子指南针(IIC+串口)使用手册V1.0.概述GY-26是一款低成本平面数字罗盘模块。
输入电压低,功耗小,体积小。
其 工作原理是通过磁传感器中两个相互垂直轴同时感应地球磁场的磁分量,从而得出方位角度,此罗盘以RS232协议,及IIC 协议与其他设备通信。
该产品精度 高,稳定性高。
并且具有重新标定的功能,能够在任意位置得到准确的方位角, 其输出的波特率是9600bps,有连续输出与询问输出两种方式,具有磁偏角补偿 功能,可适应不同的工作环境。
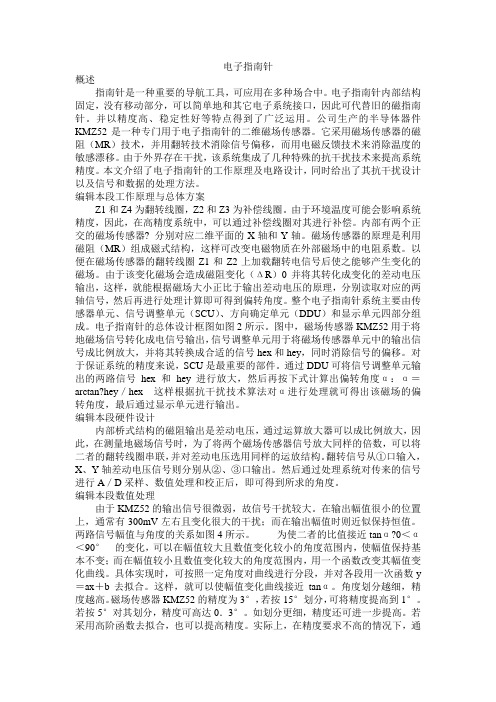
引脚按线定义’0 2* 6mm/25 - 6mmQ <■ o 0 i 。
•;■ O11 IO td 6 7□25_ Gram2- 54mm1- vcc 2- TX 3 - RX 4-SCL &. SDAGND--TC T891GHD GMD CAL NC NCvcc「产品特点及应用技术参数特点及应用(1) 、体积小(2) 、高性价比(3) 、串口及IIC输出格式(4) 、手持式仪器仪表(5) 、机器人导航、定位(6) 、航行系统7)、船用自动舵8)、八木天线定位9)、车载GPS 导线10)、航模定向三.串口通信协议波特率:9600 bps 校验位: N 数据位: 8 模块输出格式,每帧包含8 个字节:① .Byte0:0x0D(ASCII 码 回车) ② .Byte1: 0x0AASCII 码 换行)③.Byte2: 0x30~0x33 角度百位 (ASCII 0~3 ) ④.Byte3: 0x30~0x39 角度十位 (ASCII 0~9 ) ⑤.Byte4: 0x30~0x39 角度个位 (ASCII 0~9 )⑥.Byte5: 0x2EASCII 码小数点)⑦.Byte6: 0x30~0x39 角度小数位 ( ASCII 0~9 ) ⑧.Byte7: 0x00~0xFF 校验和(仅低 8bit )校验和 Byte7 = (Byte0+ Byte1 + ....... :Byte6 )纟[1)、串口通信参数停止位: 1例:一帧数据 2)、注:8bit<0x0D-0x0A-0x33-0x35-0x39-0x2E-0x36-0x1C> = 359.6 3)、命令字节,由外部控制器发送至模块(十六进制)①.0x31:进行一次角度测量返回值参考输出格式 ②.0xC0:校准磁场开始 返 回值 参 考输 出格 式( 000.0 度) ③.0xC1 :校准磁场结束 返回值参考硬铁补偿‘ ② '④.0xA0-0XAA-0XA5-0XC5 :恢复出厂设定返回值参考输出格式( 000.0 度)⑤. 0xA0-0XAA-0XA5-IIC_ADDR :模块的IIC 地址修改------- 返回值参考输出格式(000.0 度)IIC 地址范围参考“ IIC 通信协议(3)”⑥. 0x03 + 磁偏高8 位:磁偏角设定,正北方向设定-- 返回值参考输出格式(000.0 度)⑦. 0x04 + 磁偏低8 位:磁偏角设定,正北方向设定-- 返回值参考输出格式(000.0 度)例:发送0XC0 至模块时,模块应答以下1 帧<0x0D-0x0A-0x30-0x30-0x30-0x2E-0x30-0x05> 表示成功Led 灯亮起,进入校准例:发送0x03 ,0x00 ,0x04 ,0x64 至模块时,模块应答以下 1 帧(4 次)<0x0D-0x0A-0x30-0x30-0x30-0x2E-0x30-0x05> 表示成功磁偏角被修改为10.0 度四」IC通信协议(1)、进行IIC通信时,模块相当于24C04 , EEPROM存储器,通信非常简单<模块内部对应地址的数据(相当EEPROM各地址的数据),映射各参数请参考下表实际当前角度值为上表“角度值高8位”与“角度值低8位”合成的16位数据,数据范围0-3599 (因为分辨率为0.1 °)实际当前磁偏角值为“磁偏角高8位”与“磁偏角低8位”合成的16位数据,数据范围0-3599 (因为分辨率为0.1 °)磁偏角的值,范围0-3599 (因为分辨率为0.1° )是由2个8位的数据组成,当修改模块磁偏角时,分为高8位值,低8位值,写入模块。
K波雷达物位成像仪-26G调试说明书

10 0 1 (d
选择物料性质为微 DK 时,一般用于介电常数小于 1 . 4 ,这时介质表面的直接回波很弱, 或不能测量,而通过罐底反射的方法可以测得料位高度这时需要输入以下参数中的两个: 1 .空罐空高,空罐或空容器的空高值 。 2 .真实料高或待测物质的介电常数 ,这两参数关联 ,输入其中之一即可 。以上参数 的精度直接影响测量结果的精度值注 : “微 DK”的选择要慎重,大多测量是不合适 的,当 “微 DK”选择后,系统根据回波情况,判断采用直接回波法或底部反射法来得 到测量结果 。 1-4 阻尼时间 为抑制因液面波动起伏引起的测量显示的变化跳动, 可设定适当的显示阻尼时间 (范围 在 0~999 秒) ,既保证有足够的测量响应时间,又能使传感器在延时后反映出变化的测 量值。一般设定几秒的时间就足以使测量值稳定显示。 当液晶显示菜单号为 1-3 时 ,按 阻尼时间 6S 1-4 键 ,进入阻尼时间设置菜单,液晶显示如下图:
当液晶显示菜单号为 1-2 时,按 物料性质 液体
键进入“物料性质 1-3”,液晶显示如下: 1-3
再按
键进入“物料性质 1-3”,液晶显示如下: 物料性质 液体 固体 微 DK 1-3
液体 1-1-3 物位快速进入“物位快速变化 1-1-3”,液晶显示如下图:
键 ---选择编程项 ---选择参数位置 ---列出选项
键 ---进入编程状态 ---确认编程项 ---确认参数修改
1
[26G 调试说明书]
(二) 四个按键的简单说明
菜单结构参见总框图。图中向右横箭头的过渡由 键实现; 键实现横箭头的向左过渡 。 键实现;向下的箭头过渡由
仪表在按
键进入编程主菜单项 。每个参数编辑完成后须用
说明书电子指南针
数字罗盘说明书1. Introduction 介绍1.1 功能* 高度计* 数字罗盘* 大气压强(hPa, inHg, mmHg)* 温度 (℃ or ℉)* 256 组历史记录(海拔和大气压强数据)* 天气预报图标的变换(基于大气压强的变化)* 12/24 小时的始终格式* 万年历* 手调时间和日期* LED背光* 织带包含,便于携带1.2 按键功能如果按键不被按动30分钟,(气压变化在0.4Hpa), LCD 屏幕显示关闭。
按任何键,则恢复到正常显示。
1.2.1 按键“ALTITUDE/+”- 当处于设置模式,按下“ALTITUDE/+”按键,则可以增加值。
- 当处于正常显示模式下,按下“ALTITUDE/+”按键,则可以在大气压强和高度(相对/绝对)之间切换。
- 当处于海拔高度(绝对)显示时,按下“ALTITUDE/+”按键并保持不动2秒,海拔高度(绝对)将会被重置到相对高度,起始值为0 。
当处于相对高度显示时,按下“ALTITUDE/+”按键并保持不动2秒,相对高度将会被重置到海拔高度(绝对)。
备注:当累计高度的显示有需要的情况下,相对高度是很有用的。
1.2.2 按键“COMPASS/-”- 当处于设置模式,按下“COMPASS/-”按键,则可以减少值。
- 当处于正常显示模式下,按下“COMPASS/-”按键,则可以进入罗盘模式- 当处于罗盘模式下,按下“COMPASS/-”按键,则可以切换显示数字模式和指针模式。
- 按下“COMPASS/-”按键并保持不动2秒,则进入校正模式。
1.2.3 按键“SET”- 当处于正常显示模式下,按下“SET”按键,可以切换到时间和日期。
-当处于正常显示模式下,按下“SET”按键并保持不动6秒,则进入节能模式:LCD 关闭,但是,时钟还在工作。
此时,按下任何按键,将返回到正常的LCD 显示模式。
-当处于正常显示模式下,按下“SET”按键并保持不动2秒,则进入设置模式。
指南针使用手册
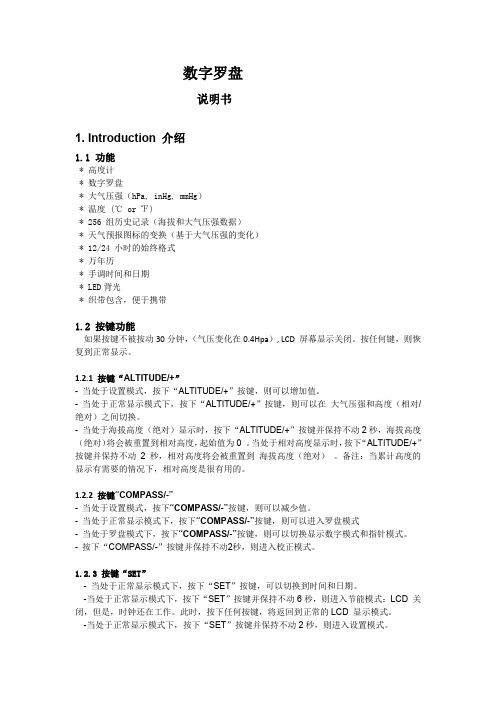
指南针使用手册1.概述高精度指南针拥有8个方位指示LED 灯,一键设置按钮,UART 串口输出。
2.图解3.使用指南针每次到新的环境中使用,都需要进行消磁和置零点操作。
当您打开控制器电源,看到指南针的方向指示灯点亮后,就可开始进行以上操作。
首先,需要消磁,请按如下步骤操作。
操作指示灯状态按住操作按钮不放,指南针会逐个点亮指示灯,当第二个灯亮起时,放开按钮,进入消磁状态8个灯闪烁缓慢旋转指南针或机器人,使8个灯闪烁指南针记忆该场地的磁场环境。
持续三圈以上。
要点:指南针水平,旋转速度要慢。
短按操作按钮,结束消磁 单个指示灯亮,指示方向 设置零点,请按照如下步骤操作:操作 指示灯状态单个指示灯亮,指示方向 将机器人至于场地,并且将指南针水平放置,按钮位于右手边,零度角LED(见图解)对准需要标定的0度位置短按操作按钮,设置0度位置单个指示灯亮,指示0度新的方向4.编程1.流程图2.代码#include"RobotLib.h"int com_1=0;void main(){com_1 = Compass_Degree();}代码中 com_1是自定义的变量,函数 Compass_Degree() 功能为得到指南针的数值,赋值后,com_1的值即为指南针的值。
5.参数参数 数值工作电压 4.5V – 5.5V输出接口 串口波特率 9600数据更新速率 240 次每秒传输速度 4.2毫秒每次分辨率 < 0.5度重复精度 < 1.5度。
26G雷达物位计中文说明书

安装位置 安装时,注意仪表和容器壁至少保持200mm的距离。
带万向节安装
1 基准面 2 容器中央或对称轴 4
防潮
对于安装在室外或潮湿室内及制冷或加热的罐上的仪 表,为了防潮,应拧紧电缆密封套,而且要在进线口处使 电缆向下弯曲。如图示。
接管示意图
以JDRD862 为例
常见安装位置的正误
容器接管
容器接管的长度:必须保证控头号伸出接管至少 10mm。
5)由于高频雷达方向性好,很多恶劣工况,可通过简单隔离,将雷达装在容器外进行测 量。 高频由于采用了先进的微处理器和独特的gchoDiscovery回波处理技术,雷达物位计可以 应用于各种复杂工况。
采用脉冲工作方式,雷达物位计发射功率极低,可安装于各种金属、非金属容器内,对人 体及环境均无伤害。
1
2.仪表概况
接线方法:24V DC供电,(4~20)mA输出
7
两线制方法:24V DC供电,(4~20)mA输出
本安+隔爆防爆接线
防爆连接
5.仪表调试
本产品的防爆形式为本质安全型和(本安+隔爆)复合 型。防爆标志:ExiaⅡC T6/Exd[ia]iaⅡC T6。脉冲型 雷达物位计采用铝外壳,电子部件采用胶封结构,从而确 保电路发生故障时产生的火花不会泄放出来。产品适用于 ExiaⅡC T6/Exd[ia]ia IIC T6防爆等级以下可燃性气体 介质的物位连续测量。
调试方法 JDRD860系列有三种调试方法: 1显示/调试模块 2上位机调试软件JDRDware 3 HART手持编程器
LCD显示/调试模块 LCD显示/调试模块是可以插接的显示调试工具,通过 4个按键对仪表进行调试。调试菜单的语言 可选。
调试后,LCD显示/调试模块一般就只用于显示,透过玻璃视 窗可以非常清楚地读出测量值。
GY-26电子指南针PIC代码IIC

#include <stdio.h>
__CONFIG(0x3F32); //芯片配置字
#define uchar unsigned char
#define uint unsigned int
#define ulint unsigned long int
void LCD_write_onechar(uchar COMM,uchar DAT);
void LCD_write_string(uchar X,uchar Y,uchar *string);
uint get_GY_26(uchar read_begin_address,uchar GY_26_cmd);
SSPCON2 = 0x00; //IIC设置
SSPADD = 50; //IIC设置
}
//LCD初始化***************************
void lcd_init(void)
{
nms_delay(100);
uchar START_DISPLAY2[16]={" Temp : "};//LCD初始化显示数据
uchar display[7]={0,0,0,'.',0,0Xdf,0}; //显示数据数组
/*********************************************
iic_Write8Bit(GY_26_cmd); //写指南针命令
iic_Stop(); //iic写停止时序
nms_delay(55); //延时,可执行其他程序
iic_Start(); //iic启动时序
指南针的用法和注意事项外观描述

指南针的用法和注意事项外观描述下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!《指南针的用法和注意事项外观描述》第一节:指南针的基本介绍。
电子指南针
电子指南针概述指南针是一种重要的导航工具,可应用在多种场合中。
电子指南针内部结构固定,没有移动部分,可以简单地和其它电子系统接口,因此可代替旧的磁指南针。
并以精度高、稳定性好等特点得到了广泛运用。
公司生产的半导体器件KMZ52是一种专门用于电子指南针的二维磁场传感器。
它采用磁场传感器的磁阻(MR)技术,并用翻转技术消除信号偏移,而用电磁反馈技术来消除温度的敏感漂移。
由于外界存在干扰,该系统集成了几种特殊的抗干扰技术来提高系统精度。
本文介绍了电子指南针的工作原理及电路设计,同时给出了其抗干扰设计以及信号和数据的处理方法。
编辑本段工作原理与总体方案Z1和Z4为翻转线圈,Z2和Z3为补偿线圈。
由于环境温度可能会影响系统精度,因此,在高精度系统中,可以通过补偿线圈对其进行补偿。
内部有两个正交的磁场传感器? 分别对应二维平面的X轴和Y轴。
磁场传感器的原理是利用磁阻(MR)组成磁式结构,这样可改变电磁物质在外部磁场中的电阻系数。
以便在磁场传感器的翻转线圈Z1和Z2上加载翻转电信号后使之能够产生变化的磁场。
由于该变化磁场会造成磁阻变化(ΔR)0并将其转化成变化的差动电压输出,这样,就能根据磁场大小正比于输出差动电压的原理,分别读取对应的两轴信号,然后再进行处理计算即可得到偏转角度。
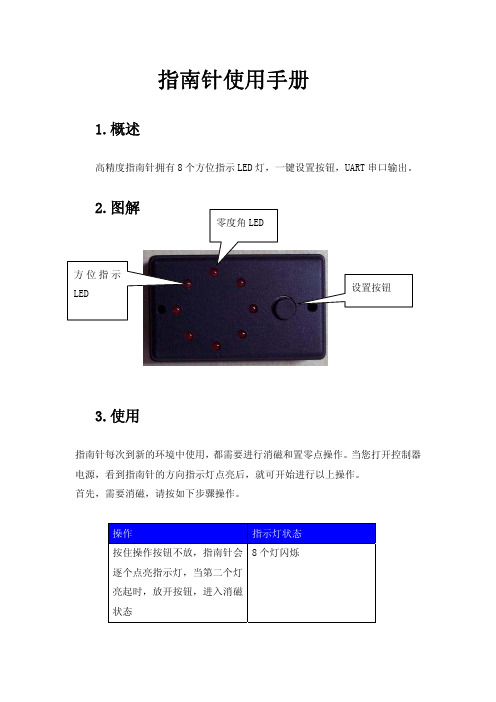
整个电子指南针系统主要由传感器单元、信号调整单元(SCU)、方向确定单元(DDU)和显示单元四部分组成。
电子指南针的总体设计框图如图2所示。
图中,磁场传感器KMZ52用于将地磁场信号转化成电信号输出,信号调整单元用于将磁场传感器单元中的输出信号成比例放大,并将其转换成合适的信号hex和hey,同时消除信号的偏移。
对于保证系统的精度来说,SCU是最重要的部件。
通过DDU可将信号调整单元输出的两路信号hex和hey进行放大,然后再按下式计算出偏转角度α:α=arctan?hey/hex这样根据抗干扰技术算法对α进行处理就可得出该磁场的偏转角度,最后通过显示单元进行输出。
GY系列双比色测温仪使用说明书
GY系列双比色测温仪使用说明书目录1 产品简介........................................................................................................................................................ - 1 -1.1 GY系列双比色测温仪原理及特点 ..................................................................................................... - 1 -1.2 性能简介............................................................................................................................................... - 2 -1.3外观尺寸................................................................................................................................................ - 2 -2 主要技术参数.................................................................................................................................................. - 2 -3 产品的安装与接线.......................................................................................................................................... - 3 -3.1 安装示意图........................................................................................................................................... - 3 -3.2 电气连接............................................................................................................................................... - 4 -4 使用.................................................................................................................................................................. - 6 -4.1 现场安装............................................................................................................................................... - 6 -4.2 连接二次仪表....................................................................................................................................... - 6 -4.3 激光对准目标....................................................................................................................................... - 6 -4.4 现场温度坡度系数修正 ....................................................................................................................... - 6 -4.5 测温仪各参数调节方法 ....................................................................................................................... - 7 -4.6抗干扰措施............................................................................................................................................ - 8 -5 保养维护与返修.............................................................................................................................................. - 8 -5.1 保养....................................................................................................................................................... - 8 -5.2 常见故障及处理方法 ........................................................................................................................... - 9 -5.3返修....................................................................................................................................................... - 9 -5.4送检..................................................................................................................................................... - 10 -6 附件................................................................................................................................................................ - 10 -6.1 随机附件............................................................................................................................................ - 10 -6.2 选配附件............................................................................................................................................ - 10 -7 质量保证......................................................................................................................................................... -12 -★提示用户在使用前一定要详细阅读本手册,不正确的安装可能导致无法测量,甚至损坏仪表。
指南针的使用说明
指南针的使用说明指南针在户外活动中已经是必不可少的重要工具,然而它的使用方法却远不止指明方向那么简单。
工具/原料一个标准的指南针方法/步骤1.测方位角:展开指北针,转动方位框使方位玻璃上的刻度线与方向指标相对正,将平视镜斜放(45°)单眼通过准星瞄向目标,从平视镜反射看到磁针N极所对反字表牌上方位分划,既可读出目标方位角,然后用右手转动方位框使方位玻璃上的刻度线与磁针N极对准,此时方向指标与方位玻璃刻度线所夹之角即为目标方位角(按顺时针方向计算)。
打开指北针,标定好地图(测距时可不标定地图),在图上基准点处插一扎针,转动指北针,使侧尺边切于目标点,即可判读出基准点至目标点的方位角。
指南针的使用说明2.标定地图:展开指北针,转动方位框,使方位框上的刻度线字与方向指标对准(注意磁偏角的修正),将指北针平放在地图上,准星一端朝向地图北极,使坐标梯尺长与地图磁子午线相切,转动地图使磁针N极对准方位玻璃上的刻度线,此时地图即已标定。
指南针的使用说明3.求向掩蔽目标行进的行军方向:展开指北针于地图上,使测绘尺经过的图上本人立足点与行军目标,这时方向指标即指应行进的方向。
转动方位框使方位玻璃上的(S、N)方向与地图上的(S、N)方向一致,然后记下方向指标所指方位角读数,面对方向指标拿起指北针旋转身体,使磁针N极与方位玻璃上的刻度线对准,此时通过准星照门向前对准,在此对准线上的各物体(如树林、房屋等)都可作为行军方向的辅助目标,认清辅助目标后即可对之前进。
将指北针关闭装入袋内,但勿转动方位框,到达辅助目标后即可再找一新辅助目标继续前进,直到目的地为止,沿途应经常检查方向读数。
指南针的使用说明4.已知目标的间隔,估测目标至站立点之间的距离:①通过照门和准星左右两尖端瞄准目标,根据目标的间隔所占准星左右两尖端间宽度的倍数,按10:1的比例公式估算目标的距离。
目标与站立点的距离(米)=目标间隔宽度(米)x10/目标间隔占准星两尖端宽度的倍数例:前方有一公路与我方阵地平行,求公路与阵地的距离。
26G雷达液位计使用手册

26G雷达物位计使用说明书非接触式雷达物位计目 录1.产品概述 (1)2.仪表介绍 (2)3.安装指南 (4)4.接线方式 (9)5.调试 (10)6.技术参数 (12)26G雷达式物位测量仪表,输出4…20mA模拟信号,测量最大距离可达70 米。
天线被进一步优化处理,新型的快速的微处理器可以进行更高速率的信号分析处理,使得仪表可以用于:反应釜或固体料仓非常复杂的测量条件。
雷达物位计天线发射较窄的微波脉冲,经天线向下传输,微波接触到被测介质位信号。
4.接线方式5.调试仪表表头产品型号过程连接螺纹G1½"A 螺纹G1½"A 螺纹G1½"A 螺纹G1½"A 螺纹G1½"A螺纹G1½"A 螺纹1½"NPT 螺纹1½"NPT 螺纹1½"NPT 螺纹1½"NPT 螺纹1½"NPT 螺纹1½"NPT 法兰法兰法兰法兰法兰法兰天线材料PTFE不锈钢/PTFE 不锈钢/PTFE 不锈钢/PTFE 不锈钢/PTFE 不锈钢/PTFE1Kg (取决于过程连接) 2Kg (取决于过程连接) 6Kg (取决于过程连接) 7Kg (取决于过程连接) 2Kg (取决于过程连接) 3Kg (取决于过程连接)输出信号/通讯协议 (4~20)mA/HARTRS485/Modbus6.技术参数高频棒式高频液体高频万向法兰式高频固体高频抛物面式高频复合式高频棒式高频液体高频万向法兰式高频抛物面式高频固体高频复合式。
指南针说明
指南针说明产品名称:XX3050精铜高档礼品指南针(礼品、珍藏指南针-本店推荐产品)颜色:如图(黄铜色)合起来时产品尺寸:50 x50x16mm (合起时直径50mm 厚度16mm )打开后的产品尺寸:50x50x20mm产品净重:47g产品毛重:52g宝贝材质:高强度精铜镜面为高级亚克力材料确定北方,正确的方法是这样的,在手掌中端平,箭头(N极)所指的就是北方.校正地图的方向很简单,但这是一切图上作业的基础:把地图放平,然后将地图上的指北标与指北针上的N极(箭头)对正,就校正了地图方向,一般情况下地图都是上北下南绘制的。
根据标志点和地图确定自己的准确位置:选择两个不同方位的可见标志点,分别测出方位角,在地图上绘出这两点方位角延长线的交点就是您所处的位置。
夜间或者在崎岖地区行军时,首先将指北针对准北方,然后将方位表牌的刻线旋转到目的地的方位角,这样你随时都可以确认行进方向,只要将N极对准,沿着刻线指示方向即可。
提环是专门栓挂绳的,在需要频繁使用而两手又被占用的情况下,比如行军状况下的侦察员可以把它挂在脖子上。
使用指南针,可使地图和实际地形的方位一致,探知现在你所在的地点和寻找的目的地的方位。
指南针务必水平地拿着,而且要远离以下列举的各种物品,才可避免磁针发生错乱:指南针应离铁丝网10米,高压线55米,汽车和飞机20米,以及含有磁铁如磁性容器等10米。
利用指南针探知现在所在位置的步骤:①使实际地形和地图方向一致。
②在地图上找出二个可看出的目标物。
③将指南针的进行线(或长边)朝向其中的一个目标物④找到圆圈配合箭号和指针(北)相吻合。
⑤不改变圆圈的方向将其放在地图的北方位置。
⑥指南针的长边之尖端吻合地图上的目标物。
⑦当圆圈的箭号和磁北线延线画一条直线。
⑧针对另一目标依照同样的方法进行。
两条线的交错处即是现在所在位置。
用指南针探知前进的方向①使连结现在位置和目的地的直线吻合指南针的进行线(长边)。
②圆圈的箭号和磁北线平行(箭号在地图的上边部分)。
指南针使用方法
指南针使用方法
指南针是一种常用的导航工具,使用方法如下:
1. 找到一个平稳的地方,远离任何可能会干扰指南针读数的物体,如大型金属物体、电子设备等。
2. 将指南针放置在手掌上,并保持水平。
3. 观察指南针上的指针,确保它在罗盘底座内可以自由转动。
4. 转动自己的身体,直到指南针的指针与指南针底座上的指南针保持在同一水平面上。
5. 确保指南针的指针指向北方,这样就可以确定其他方向的指示。
6. 在使用中需要及时调整指南针的指针位置,确保其准确指示方向。
总之,使用指南针需要找到平稳的环境并保持指南针的水平,同时确保指针指向北方,这样就可以正确使用指南针来进行导航。
指南针使用说明
指南针使用说明目录1.指南针的原理和历史 (1)1.1.指南针的原理 (1)1.2.指南针的历史 (1)2.指南针的类型 (2)3.指南针的结构 (4)3.1.军用指南针的基本结构 (4)3.2.荧光点 (5)3.3.反光镜 (6)3.4.DQY-1型指南针的基本结构 (6)4.指南针的主要功能和使用方法 (7)4.1.测定方位 (7)4.2.测量距离 (8)4.3.行军时间及速度计算 (9)4.4.测定斜面的坡度(俯仰角度) (10)4.5.测量目标概略高度 (11)4.6.DQY-1型指南针主要功能 (11)5.应用:天线方位角的定位方法和下倾角测量 (12)5.1.规划选点中确定扇区天线的方位角 (12)5.2.优化中测量已安装天线的方位角 (12)5.3.天线下倾角的粗略测量 (13)6.应用:指南针与地图的配合使用 (13)6.1.利用指南针探知现在所在位置的步骤 (13)6.2.用指南针探知前进的方向 (14)7.指南针使用的注意事项 (14)8.附录:密位的概念 (15)1.指南针的原理和历史说明:指南针是民间的通常称呼,在军事上正式名称为指北针或军用指北针,在地质上使用的称为地质罗盘仪,本文通称指南针。
1.1.指南针的原理指南针是利用地球磁场作用来指示北方的,利用的是磁场同极性相斥、异极性相吸的原理,然后以北方为起始点,定其为零度,顺时针方向依序确定各方位角,可由此来指示方向。
定位上必须配合地图的运用来寻求相对位置才能明了自身所处之处。
注意指南针所指的北不是真北,而是磁北,这是因为地球南、北极和地磁南、北极不在一个位置上,而是有一个角度,这个角度叫磁偏角。
不同地点的磁偏角一般是不同的,同一地点的磁偏角也因时而变。
1.2.指南针的历史指南针是中国古代四大发明之一,也是中国对世界文明发展的一项重大贡献。
指南针是利用磁铁在地球磁场中的南北极极性而制成的一种指向仪器,磁石的这种特性,被古人利用来制成指南工具。
一种适用于擂台机器人的方向定位方法
技术应用Technique and application 46机器人技术与应用202060引言机器人竞赛是近年国际上迅速开展起来的一种高技术对抗赛事,它涉及人工智能、通信、传感机构等多个领域的前沿研究和技术融合,它集高技术、娱乐和比赛于一体,引起了社会的广泛关注和极大兴趣。
随着机器人技术逐渐发展成熟,基于机器视觉、机械学、传感器信息融合、人工智能等多个领域的机器人竞赛被提出。
中国机器人大赛包括水中机器人赛、医疗机器人赛、空中机器人赛、武术擂台赛等多个项目 [1]。
其中,武术擂台赛项目机器人在擂台上的方位判断、敌我识别,是整个比赛的关键和难点。
笔者就此机器人在方位判断的方法上展开研究,为机器人在擂台赛上的方位识别提供一种方案,实现机器人的竞争力。
1 研究背景机器人武术擂台赛是由中国自动化学会机器人竞赛工作委员会等单位主办的、每年一度“中国机器人大赛暨RoboCup 公开赛”中的一个比赛项目,参赛队伍需要在规则范围内设计、组装能自主运动的机器人,在指定的擂台上模拟中国传统擂台格斗的规则,互相击打或者推挤。
如果一方机器人整体离开擂台区域,或者不能再继续行动,或被对方机器人打倒,则另一方获胜。
因此,如何使机器人在短时间内对自身的方位定位以及敌我方向的识别,是比赛的关键。
常见的擂台机器人寻敌方法是:通过红外传感器检测来判断敌人相对的方向和位置,而红外传感器只能识别到物体,并不能区分是障碍还是敌人,因此识别方向有一定的随机性。
此外,擂台机器人在寻敌过程中只能通过延时(Delay)来控制转向,而设置延时的时间长短会受到机器人转向速度的影响,机器人的旋转速度又跟电池电量、轮子和地面的摩擦力等密切相关,这使得延时设置很难控制,方向定位不精确、不可靠,在比赛中也会耗费大量精力来调节延时长短。
因此,本文提出一种解决方案,可以较准确地定位方向,同时也节约调试时间。
2 设计方案2.1整体方案本设计系统主要有三个主要部分,分别为STM32控制器模块,GY-26传感器数据采集模块和擂台机器人控制器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GY-26电子指南针使用手册(IIC+串口)
一、概述
GY-26是一款低成本平面数
字罗盘模块。
输入电压低,功
耗小,体积小。
其工作原理是
通过磁传感器中两个相互垂直
轴同时感应地球磁场的磁分量,
从而得出方位角度,此罗盘以
RS232协议,及IIC 协议与其
他设备通信。
该产品精度高,
稳定性高。
并切具有重新标定
的功能,能够在任意位置得到
准确的方位角,其输出的波特
率是9600bps,有连续输出与询
问输出两种方式,具有磁偏角
补偿功能,可适应不同的工作
环境。
二、产品特点
(1)、体积小
四、技术参数(2)、高性价比
(3)、串口及IIC 输出格式
三、产品应用
(1)、手持式仪器仪表
(2)、机器人导航、定位
(3)、航行系统
(4)、船用自动舵
(5)、八木天线定位
(6)、车载GPS 导线
(7)、航模定向
名称参数测量范围0°~360°分辨率0.1°测量精度1°重复精度1°响应频率25HZ 工作电压3~5V 工作电流5V--15mA 3V--8mA 工作温度-20°~85°储存温度-40°~125°尺寸25.6mm ×25.6mm
五、串口通信协议
(1)、串口通信参数
波特率:9600bps校验位:N数据位:8停止位:1
(2)、模块输出格式,每帧包含8个字节:
①.Byte0:0x0D(ASCII码回车)
②.Byte1:0x0A(ASCII码换行)
③.Byte2:0x30~0x33角度百位(ASCII0~3)
④.Byte3:0x30~0x39角度十位(ASCII0~9)
⑤.Byte4:0x30~0x39角度个位(ASCII0~9)
⑥.Byte5:0x2E(ASCII码小数点)
⑦.Byte6:0x30~0x39角度小数位(ASCII0~9)
⑧.Byte7:0x00~0xFF校验和(仅低8bit)
注:校验和Byte7=(Byte0+Byte1+…….Byte6)结果仅取低8bit
例:一帧数据<0x0D-0x0A-0x33-0x35-0x39-0x2E-0x36-0x1C>=359.6°
(3)、命令字节,由外部控制器发送至模块(十六进制)
①.0x31:进行一次角度测量--------返回值参考输出格式
②.0xC0:校准磁场开始---------返回值参考输出格式(000.0度)
③.0xC1:校准磁场结束--------------返回值参考硬铁补偿‘②’
④.0xA0-0XAA-0XA5-0XC5:
恢复出厂设定----------------------返回值参考输出格式(000.0度)
⑤.0xA0-0XAA-0XA5-IIC_ADDR:
模块的IIC地址修改-------------返回值参考输出格式(000.0度)
IIC地址范围参考“IIC通信协议(3)”
⑥.0x03+磁偏高8位:
磁偏角设定,正北方向设定--返回值参考输出格式(000.0度)
⑦.0x04+磁偏低8位:
磁偏角设定,正北方向设定--返回值参考输出格式(000.0度)
例:发送0XC0至模块时,模块应答以下1帧
<0x0D-0x0A-0x30-0x30-0x30-0x2E-0x30-0x05>表示成功
Led灯亮起,进入校准
例:发送0x03,0x00,0x04,0x64至模块时,模块应答以下1帧(4次)<0x0D-0x0A-0x30-0x30-0x30-0x2E-0x30-0x05>表示成功
磁偏角被修改为10.0度
六、IIC通信协议
(1)、进行IIC通信时,模块相当于24C04,EEPROM存储器,通信非常简单。
模块内部对应地址的数据(相当EEPROM各地址的数据),映射各参数
请参考下表
模块内部地址地址的数据含义
0x00未用到
0x01角度值高8位
0x02角度值低8位
0x03磁偏角高8位
0x04磁偏角低8位
0x05未用到
0x06未用到
0x07校准等级值
实际当前角度值为上表“角度值高8位”与“角度值低8位”合成的16
位数据,数据范围0-3599(因为分辨率为0.1°)
实际当前磁偏角值为“磁偏角高8位”与“磁偏角低8位”合成的16
位数据,数据范围0-3599(因为分辨率为0.1°)
(2)、模块的命令表,经IIC总线写入模块中
命令值作用
0x00+0x31角度测量
0x00+0xC0校准
0x00+0xC1停止校准
0x00+(0xA0+0XAA+0XA5+0XC5)恢复出厂设置
0x00+(0xA0+0XAA+0XA5+IIC_ADDR)IIC地址修改
0x03+磁偏高8位值磁偏角修改
0x04+磁偏低8位值磁偏角修改
磁偏角的值,范围0-3599(因为分辨率为0.1°),是由2个8位的数据组成,当修改模块磁偏角时,分为高8位值,低8位值,写入模块。
(3)、模块的IIC地址可修改,出厂默认是0xe0。
模块上电时led对应IIC地址闪动,闪动的次数由模块上电led亮起,led灭掉开始记。
若模块上电立即向模块发送命令,则led不闪动。
向模块写入地址时,模块只接收以下16个数据地址,其他无效
模块地址Led闪动次数
0xe00
0xe21
0xe42
0xe63
0xe84
0xea5
0xec6
0xee7
0xf08
0xf29
0xf410
0xf611
0xf812
0xfa13
0xfc14
0xfe15
七、术语说明
(1)、磁偏角
磁北线与真北线之间的夹角(如图),地球表面任一点的磁子午圈同地理子午圈的夹角。
不同的地点磁偏角不同,同一地点不同的时间磁偏角也不同。
模块的磁偏角=原始角度+设定磁偏角度,即顺时针加上。
例如:磁偏角为0的100度,此时更改磁偏角为10度,那么模块输出为100+10=110度。
(2)、硬铁补偿,磁场校准
当电子指南针使用的环境发生改变时,由于受到周围磁场的影响,输出的角度也将会受到干扰,为了消除干扰,需要进行环境磁场校准。
本模块的校准方法有三种种如下:
①在模块的第9(CAL)引脚,接一按键至电源负极(GND),当第一
.
次按下按键时,进入校准状态,LED常亮起。
保持模块水平,缓慢
旋转1周(旋转1周时间大约1分钟)。
再次按下按键LED灭,校
准结束。
.
②控制器串口发送数据0XC0至模块后LED常亮起,模块应答成功数
据。
保持模块水平,缓慢旋转1周(旋转1周时间大约1分钟)。
发
送数据0XC1至模块,LED灭,校准结束。
此时模块模块应答本次
校准的等级(0级~9级,级数越大说明校准越好),应答一帧格式为:
Byte0:0x0D(ASCII码回车)
Byte1:0x0A(ASCII码换行)
Byte2:0x30(ASCII码0)
Byte3:0x30(ASCII码0)
Byte4:0x30(ASCII码0)
Byte5:0x2E(ASCII码小数点)
Byte6:0x30~0x39校准等级(ASCII0~9)
Byte7:0x00~0xFF校验和(仅低8bit)
注:校验和Byte7=(Byte0+Byte1+…….Byte6)结果仅取低8bit
例:发送0XC1至模块时,模块应答以下1帧
<0x0D-0x0A-0x30-0x30-0x30-0x2E-0x39-0x0E>表示成功校准等级9
③.控制器经IIC总线发送数据0x00+0xC0至模块后LED常亮起保持模块
水平,缓慢旋转1周(旋转1周时间大约1分钟)。
发送数据0x00+0XC1
至模块,LED灭,校准结束。
八、结束
(1)、模块参数都是基于一个标准5V状态下测试的。
建议使用纹波较小的电源供给。
(2)、模块测量时LED的闪动对应测量的频率。
校准时LED常亮。
(3)、模块测量时和校准时,保持水平,将获得最好的准确度,测量时应远离磁体尽量30厘米以上。
(4)、模块内部有记忆功能,可掉电记忆校准系数及磁偏角。
(5)、恢复出厂设定,即恢复出厂时的校准系数及磁偏角度,并不会修改模块当前的IIC地址。
(6)、模块输入输出的高低电平3-5V,可以直接与单片机串口,单片机IO连接,可以直接与PL2303,CH340,FT232等芯片连接,但不能与电脑串口直接连接。