(台达)一键启停(3种方法)
台达vfd-b变频器说明书
VFD055B23A VFD055B43A VFD075B23A VFD075B43A VFD110B23A VFD110B43A
5.50 kW (7.50HP) 230V / 3-phase 5.50 kW (7.50HP) 460V / 3-phase 7.50 kW (10.0HP) 230V / 3-phase 7.50 kW (10.0HP) 460V / 3-phase 11.0 kW (15.0HP) 230V / 3-phase 11.0 kW (15.0HP) 460V / 3-phase
VFD022B21A/B VFD022B23A VFD022B43A VFD037B23A/B VFD037B43A/B
2.20 kW (3HP) 230V / 1-phase 2.20 kW (3HP) 230V / 3-phase 2.20 kW (3HP) 460V / 3-phase 3.70 kW (5HP) 230V / 3-phase 3.70 kW (5HP) 460V / 3-phase
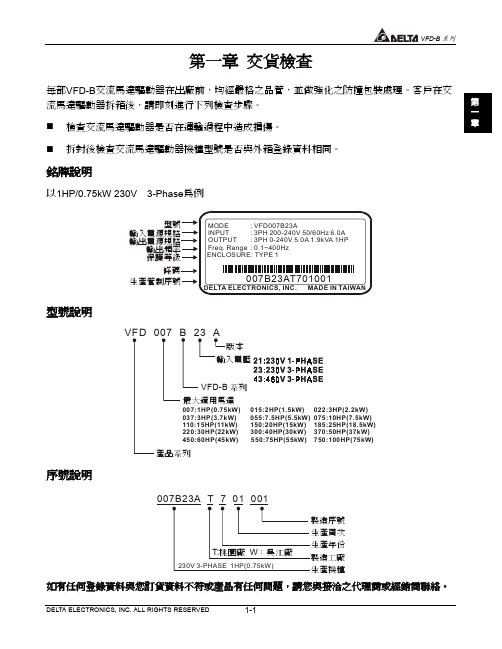
型號說明
型號 輸入電源規格 輸出電源規格
輸出頻率 保護等級
條碼 生產管制序號
MODE
: VFD007B23A
INPUT
: 3PH 200-240V 50/60Hz 6.0A
OUTPUT : 3PH 0-240V 5.0A 1.9kVA 1HP
Freq. Range : 0.1~400Hz
ENCLOSURE: TYPE 1
118.0 [4.65] 108.0 [4.25]
5.5[0.22]
VFD-B րЕ
Unit: mm (inches)
160.0 [6.30] ௐ ˟ ౢ
173.0 [6.81] 185.0 [7.28]
台达伺服调机步骤简易说明书
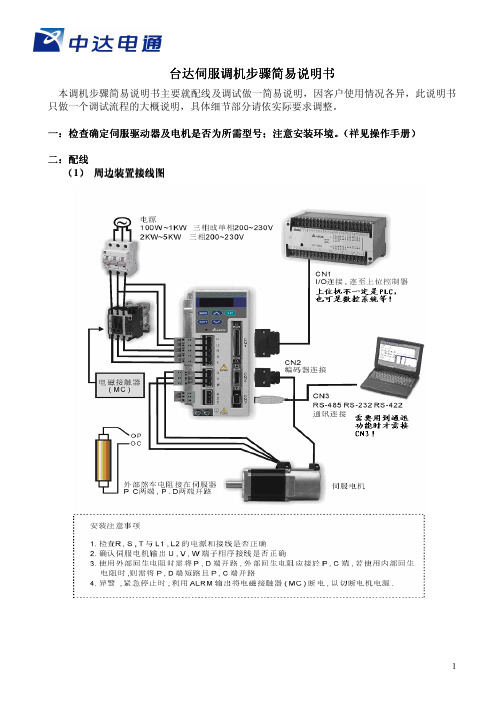
台达伺服调机步骤简易说明书本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书只做一个调试流程的大概说明,具体细节部分请依实际要求调整。
一:检查确定伺服驱动器及电机是否为所需型号检查确定伺服驱动器及电机是否为所需型号;;注意安装环境注意安装环境。
(。
(祥见操作手册祥见操作手册祥见操作手册))二:配线(1) 周边装置接线图(2) 信号与配线请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配 线是不同的,具体请参照手册3-23至3-26页说明。
但请注意, 1.无 论是什么控制模式,伺服驱动器均需DC24V 电源,您可以让驱动器自已 供给此电源(PIN17脚VDD 与PIN11脚COM+短接);也可以外加POWER 供电(+24接伺服驱动器PIN11脚COM+,GND 接伺服的PIN45,47,49 脚COM-); 2.驱动器均需SERVO ON ,如参数没有变动,PIN9脚DI1 SON 信号需导通。
您可以根据您的需要让PIN9与PIN45等常时短接或用个开 关量来控制它的ON-OFF ; 3.如果您没有用到CW ,CCW 禁止极限和外加 急停按扭,则请把PIN 32,PIN31 ,PIN30与PIN45等COM-脚短路。
(3) 编码器接线1.編碼器引出線連接頭規格:驅動器容量 電機型號 Encoder Connector定義100w ASMT-01L250X 200w ASMT-02L250X 400w ASMT-04L250X 750WASMT-07L250XHOUSING:AMP (1-1318118-6)A1KW ASMT-10L250X ASMT-10M250X 2KW ASMT-20L250X ASMT-20M250X 3KW ASMT-30L250X ASMT-30M250X 5KWASMT-50M250X20-29 17-#16MS3106B20-29SB端子定義內容 A 端子 A1 B1 A2 B2 A3 B3 A5 B5 B6 A /A B /B Z /Z 5V GND 颜色 蓝 蓝/黑 绿 绿/黑 黄 黄/黑 红 黑 BRAID SHELDB 端子 A BCD F G S RA/AB/BZ/Z5VGND線材選擇請使用附隔離網線的多芯双绞線線材選擇請使用附隔離網線的多芯双绞線,,而隔離網線要確實與SHIELD 端相連接端相連接!2.CN2接头定义:附件附件::电子齿轮比设定步骤1. 确认机械规格确认机械规格与电子齿比设定相关的要素有:齿轮比;螺杆节距;滑轮直径等。
台达TD500系列变频器说明书
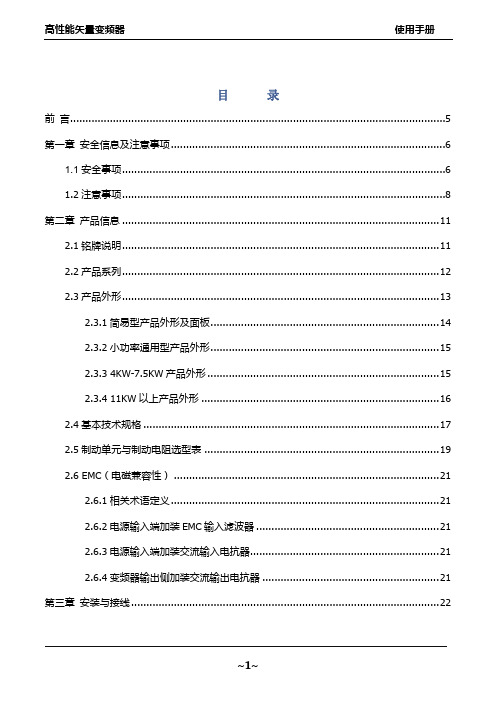
目 录前言 (5)第一章安全信息及注意事项 (6)1.1安全事项 (6)1.2注意事项 (8)第二章产品信息 (11)2.1铭牌说明 (11)2.2产品系列 (12)2.3产品外形 (13)2.3.1简易型产品外形及面板 (14)2.3.2小功率通用型产品外形 (15)2.3.3 4KW-7.5KW产品外形 (15)2.3.4 11KW以上产品外形 (16)2.4基本技术规格 (17)2.5制动单元与制动电阻选型表 (19)2.6 EMC(电磁兼容性) (21)2.6.1相关术语定义 (21)2.6.2电源输入端加装EMC输入滤波器 (21)2.6.3电源输入端加装交流输入电抗器 (21)2.6.4变频器输出侧加装交流输出电抗器 (21)第三章安装与接线 (22)3.1.1安装环境 (22)3.1.2安装空间要求 (22)3.1.3机械安装注意事项 (23)3.2电气安装 (23)3.2.1主回路端子说明 (23)3.2.2变频器主回路接线方式 (24)3.2.3主回路配线注意事项 (24)3.2.4控制回路端子说明 (26)3.2.5端子接线图 (28)3.2.6主控板跳线设置 (31)第四章键盘操作说明 (32)4.1操作与显示界面介绍 (32)4.1.1功能指示灯说明 (32)4.2键盘按键说明 (33)4.2.1参数设置 (33)4.2.2电机参数自学习 (34)4.2.3密码设置 (36)第五章功能参数表 (36)5.1基本功能参数简表 (37)5.2监视参数简表 (69)第六章参数说明 (72)P1组电机参数 (80)P2组矢量控制参数 (83)P3组 V/F控制参数 (85)P4组输入端子 (93)P5组输出端子 (104)P6组启停控制 (109)P7组键盘与显示 (113)P8组辅助功能 (118)P9组故障与保护 (130)PA组过程控制PID功能 (137)PB组摆频、计数功能 (144)PC组多段速指令及简易PLC功能 (146)Pd组通讯参数说明 (152)PE组保留 (154)PF组功能码管理 (154)A0组转矩控制和限定参数 (156)A1–A4组参数保留 (158)A5组控制优化参数 (158)通讯数据地址定义 (161)1.1功能码数据 (161)1.2非功能码数据 (162)Modbus 通讯协议 (165)1.1应用方式 (165)1.2总线结构 (165)1.3通讯资料结构 (166)1.3.1数据帧字段说明: (167)1.4功能码参数地址标示规则 (168)第七章维护保养与故障诊断 (173)7.1变频器的日常保养与维护 (173)7.1.1日常保养 (173)7.1.2定期检查 (173)7.1.3变频器易损件更换 (174)7.1.4变频器的存贮 (174)7.2故障报警及对策 (175)7.3常见故障及其处理方法 (179)前言首先感谢您购买本公司开发生产的高性能矢量变频器!本系列变频器是一款通用高性能电流矢量变频器,主要用于控制和调节三相交流异步电机的速度和转矩。
一个按钮的控制电机启动停止

用一个按钮实现控制电机启动与停止的几种编程方法介绍网上看到有好多网友提出用一个按钮实现控制电机的启动与停车的求助帖,这里,用S7-200编程,用不同的思路编写出5种可控制电机启停的梯形图,供大家分析参考1、第一种设计方案:用SR触发器指令构成的控制电路,见下图:程序解析:按钮接 I1.0 输入点,按下按钮,使 I1.0=1,断电延时定时器 T101 得电吸合,按钮抬起,I1.0=0 ,T101 并不立即释放,要延时0.4S,才释放断开,用此T101的目的,防止按钮在按下的瞬间产生抖动而出现的打连发的现象,即确保按钮动作的可靠无误。
此条可以不用,如不用时,将下一条中的T101改为 I1.0 即可。
第二条是用SR触发器指令配合其他指令构成双稳态电路,其编程要点是,用SR输出的Q1.0位信号的常开与常闭点串接在R、S触发输入口中,这样处理可确保双稳态电路的动作可靠性。
加”SM0.1”并接在R输入端上的目的是确保开机时,Q1.0=0,即确保输出口为断开状态。
2、第二种设计方案:同第一种构思是一样的,是利用PLC周期性的逐条询检的特点编写的,只是语句用的不一样。
该图的第一条的作用原理同上,第二条,T101(或 I1.0)的后沿到来,如果M1.0=0,就使Q1.0=1(输出接通),否则(即M1.0=1)Q1.0=0(即输出断开)。
第三条为将Q1.0 --> M1.0,这一条的作用就是利用时间差,即第二条动作完成后,才将Q1.0 --> M1.0,从而确保第二条动作的可靠性。
3、第三种设计方案:用加1计数器实现。
见下图:该程序是利用二进制加法计数器的个位数,在进行加1运算时,总是0、1变化的特点编写的,第一条是初始化,即将MB1清0,确保开机后Q1.0的输出状态为断开,第二条防抖动,第3条 T101的后沿使MB1内容加1,第4条为将M1.0 --> Q1.0。
分析一下动作:开机使 MB1=0,即M1.0=0,也是 Q1.0=0 输出为断开状态。
台达H系列操作手册
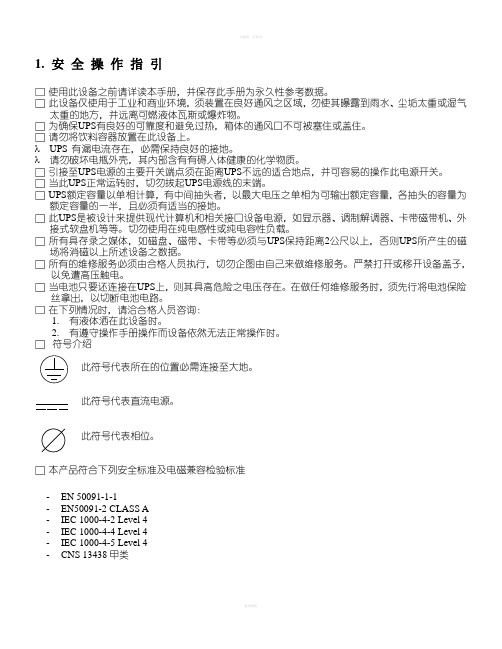
可编辑可修改1. 安全操作指引使用此设备之前请详读本手册,并保存此手册为永久性参考数据。
此设备仅使用于工业和商业环境,须装置在良好通风之区域,勿使其曝露到雨水、尘垢太重或湿气太重的地方,并远离可燃液体瓦斯或爆炸物。
为确保UPS有良好的可靠度和避免过热,箱体的通风口不可被塞住或盖住。
请勿将饮料容器放置在此设备上。
λUPS 有漏电流存在,必需保持良好的接地。
λ请勿破坏电瓶外壳,其内部含有有碍人体健康的化学物质。
引接至UPS电源的主要开关端点须在距离UPS不远的适合地点,并可容易的操作此电源开关。
当此UPS正常运转时,切勿拔起UPS电源线的末端。
UPS额定容量以单相计算,有中间抽头者,以最大电压之单相为可输出额定容量,各抽头的容量为额定容量的一半,且必须有适当的接地。
此UPS是被设计来提供现代计算机和相关接口设备电源,如显示器、调制解调器、卡带磁带机、外接式软盘机等等。
切勿使用在纯电感性或纯电容性负载。
所有具存录之媒体,如磁盘、磁带、卡带等必须与UPS保持距离2公尺以上,否则UPS所产生的磁场将消磁以上所述设备之数据。
所有的维修服务必须由合格人员执行,切勿企图由自己来做维修服务。
严禁打开或移开设备盖子,以免遭高压触电。
当电池只要还连接在UPS上,则其具高危险之电压存在。
在做任何维修服务时,须先行将电池保险丝拿出,以切断电池电路。
在下列情况时,请洽合格人员咨询:1.有液体洒在此设备时。
2.有遵守操作手册操作而设备依然无法正常操作时。
符号介绍此符号代表所在的位置必需连接至大地。
此符号代表直流电源。
此符号代表相位。
本产品符合下列安全标准及电磁兼容检验标准-EN 50091-1-1-EN50091-2 CLASS A-IEC 1000-4-2 Level 4-IEC 1000-4-4 Level 4-IEC 1000-4-5 Level 4-CNS 13438甲类2. 简介功能与特色●真正在线式设计,提供您的重要电气设备一个全天候不断电之电源。
台达UPS使用说明书

台达UPS使用说明书台达UPS故障代码UPS状态0 UPS 输出关闭2 备用电源输出10 整流器缓启动18 逆变器测试20 逆变器供电22 电池供电24 电池低电压26 电池低电压关机28 UPS 输出短路保护30、58 维护旁路供电32 并联线断线通讯失败34 逆变器故障关机36 逆变器超载关机38 远端紧急关机40、42、44 逆变器输出电压异常46 紧急关机50 DC BUS 过电压关机52、54、56 逆变器保险丝熔断60、62、64 逆变器温度过高关机5. UPS 启动程序5-1 开机程序(单机)系统启动前请先检查下列几点注意事项:1. 所有开关置于切断(OFF)位置,同时电池箱内开关或保险丝未接上。
2. 确认零线(NEUTRAL)与地线(GND)电位相同。
3. 确认配线是否正确并检查输入电源之电压、频率、相序及电池极性是否符合机器规格。
4. 检查辅助电源及风扇保险丝座(N)是否已接上。
当上述条件皆符合后,即可依下列步骤开机:1. 启动”备用电源输入”开关,此时LCD 画面显示”旁路电源供电”。
2. 启动”整流器输入”开关,约30 秒后DC BUS 电压建立。
3. 启动电池箱内的”电池开关”。
4. 同时按逆变器”ON”及” ”键3 秒,此时逆变器启动约30 秒后电压建立,”逆变器电磁接触器”闭合。
此时负载转由逆变器供电,LCD 画面显示”UPS 正常”。
5. 量测UPS 输出开关上之电压是否正常,若正常即可启动输出开关供电给负载。
当UPS 正常开机后约30 秒,UPS 会自动执行电池测试功能,以检测电池是否正常。
5-2 整机关机程序(单机)此操作程序可切断一切电源供应,请先确认负载已关闭,操作步骤如下:1. 关闭”UPS”输出开关。
2. 按逆变器”OFF”及“回车键”键3 秒,若此时旁路电源正常,亦即旁路电压及频率皆在设定范围内,逆变器立即关闭且”逆变器电磁接触器”跳脱,UPS 转由旁路电源供电,同时LCD画面显示”旁路电源供电”。
台达DTC系列 模块扩展型操作手册
2016/03/11系列數字控制器操作手冊非常感谢您选用台达产品,请在使用前,详细阅读本使用说明书,并将手册放置于易拿处以便参考。
注意事項注意!电击危险!本机为开放型装置,因此在使用本机时,必须安装于具防尘、防潮及免于电击/冲击的外壳配电箱内,另必须具备保护措施(如:特殊的工具或钥匙才可打开)防止非维护人员操作或意外冲击本体,造成危险与损坏。
1. 如果有尘土或金属残渣掉入机身,可能会造成误运行。
请勿修改或擅自拆卸本控制器。
空余端子请勿使用。
2. 安装时离开高电压及具有强高周波噪声的地方防止干扰。
在以下情况会发生以下情况的场所避免使用此控制器:(a) 灰尘过多及有腐蚀性气体(b) 高湿度及高辐射 (c) 震动及冲击3. 实施配线时与更换输入传感器时,务必关闭电源。
4. 热电对、白金测温阻抗体的引线要延长时或有结线的场合请依热电对、白金测温阻抗体的种类务必使用正确补偿导线。
5. 由测温体到温调本体的配线路请用最短距离配线,为了避免噪声与诱导的影响尽将可能电源线和负载配线分开。
6. 上电前请确认电源/信号装配是否正确,否则可能造成严重损坏。
7. 上电时请勿接触机体端子或进行维修,否则可能遭致电击。
8. 切断电源一分钟之内,线路未完全放电,请勿接触内部线路。
9. 不论上电与否请勿接触内部连接端子以免损坏线路。
10. 安装时,请勿与其它发热体(如电源等)直接并靠在一起,请保持适当间距。
型號說明DTC12345DTC系列名称 DTC:台达C系列数字控制器1 机台位置1:第一台2:并接机种2辅助输出组数0:标准品,二组输出,无辅助输出1:一组辅助输出,目前不提供2:二组辅助输出,目前不提供3 4选购配备00:标准配备01:CT输入02:Event输入,目前不提供5主输出型式R:继电器输出 SPST, 250VAC, 3AV:电压脉冲输出12V +10% ~ 20%C:电流输出4 ~ 20mAL:线性电压输出0 ~ 10V(DTC1000/2000机种):电源为DC24V输入,两组输出,第二组输出为继电器输出,RS-485通讯。
台达变频器制动单元VFDB中文使用手册
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVEDVFDB-1感謝您選用台達VFDB 動力制動煞車模組。
VFDB 制動單元主要應用於當㆔相感應馬達由交流馬達驅動器所驅動,在減速停止時用以吸收由馬達側所回生的能量,藉由VFDB 制動單元將此能量以熱能的方式消耗在煞車電阻㆖。
本產品在安裝使用前,請詳細參閱使用手冊的說明再進行施工配線,以免造成機械或㆟員的傷害。
VFDB 動力制動煞車模組適用於本公司VFD 所有系列的交流馬達驅動器。
VFDB 制動單元需搭配煞車電阻BR 系列,才能發揮優異的制動特性,詳細的規格及使用方法請繼續參閱本使用說明書。
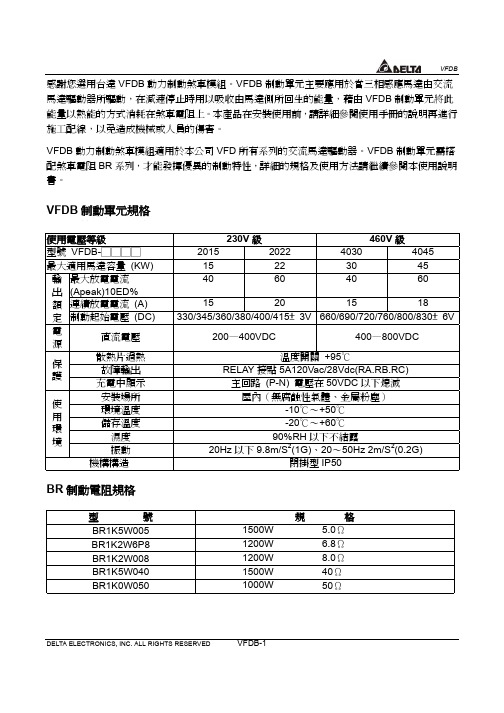
VFDB 制動單元規格使用電壓等級 230V 級 460V 級型號 VFDB-□□□□2015 2022 4030 4045 最大適用馬達容量 (KW)15 22 30 45 最大放電電流(Apeak)10ED%40 60 40 60 連續放電電流 (A)15 20 15 18 輸 出 額 定 制動起始電壓 (DC)330/345/360/380/400/415±3V 660/690/720/760/800/830±6V 電源直流電壓 200—400VDC 400—800VDC散熱片過熱 溫度開關 +95℃故障輸出 RELAY 接點5A120Vac/28Vdc(RA.RB.RC)保護充電㆗顯示 主回路 (P-N) 電壓在50VDC 以㆘熄滅 安裝場所 屋內(無腐蝕性氣體、金屬粉塵)環境溫度 -10℃〜+50℃儲存溫度 -20℃〜+60℃濕度 90%RH 以㆘不結露使用環境振動 20Hz 以㆘9.8m/S 2(1G)、20〜50Hz 2m/S 2(0.2G) 機構構造 閉掛型IP50BR 制動電阻規格型 號 規 格BR1K5W005 1500W 5.0Ω BR1K2W6P8 1200W 6.8Ω BR1K2W008 1200W 8.0Ω BR1K5W040 1500W 40Ω BR1K0W0501000W50ΩDELTA ELECTRONICS, INC. ALL RIGHTS RESERVEDVFDB-2 制動單元與放電電阻適用㆒覽表交流馬達驅動器 制動單元 放 電 電 阻電壓最大適用 馬達容量 KW(HP)型號 VFDB 用量單支電阻規格用 量 型號 BR總串/並聯 電阻規格制動轉矩 10%ED積熱電驛規格 ㆗心值 11(15) 2015 1 1200W 6.8Ω 2 1K2W6P8 2400W 13.6Ω 125 20A 15(20) 2015 1 1500W 5Ω 2 1K5W005 3000W 10Ω 125 30A 18.5(25) 2022 11200W 8Ω 4 1K2W008 4800W 8Ω125 35A 22(30) 2022 1 1200W 6.8Ω 4 1K2W6P8 4800W 6.8Ω 125 40A 30(40) 2015 2 1500W 5Ω 4 1K5W005 3000W 10Ω 125 30A 37(50) 2015 21500W 5Ω 4 1K5W005 3000W 10Ω100 30A 23 0 V45(60) 2022 2 1200W 6.8Ω 8 1K2W6P8 4800W 6.8Ω 120 30A 11(15) 4030 1 1000W 50Ω 1 1K0W050 1000W 50Ω 135 10A 15(20) 4030 1 1500W 40Ω 1 1K5W040 1500W 40Ω 125 15A 18.5(25) 4030 1 1200W 8Ω 4 1K2W008 4800W 32Ω125 15A22(30) 4030 1 1200W 6.8Ω 4 1K2W6P8 4800W 27.2Ω 125 20A 30(40) 4030 1 1500W 5Ω 4 1K5W005 6000W 20Ω 125 30A 37(50) 4045 11200W 8Ω 8 1K2W008 9600W 16Ω125 40A45(60) 4045 1 1200W 6.8Ω 8 1K2W6P8 9600W 13.6Ω 125 50A 55(75) 4030 21500W 5Ω 8 1K5W005 6000W 20Ω125 30A46 0 V75(100) 4045 21200W 6.8Ω 16 1K2W6P8 9600W 13.6Ω 125 50ADELTA ELECTRONICS, INC. ALL RIGHTS RESERVED VFDB-3DELTA ELECTRONICS, INC. ALL RIGHTS RESERVEDVFDB-4 各部名稱及功能說明各端子使用線徑回路名稱 端子記號導線線徑AWG/mm 2端子規格 電源輸入回路 P(+)、N(-) 10〜12AWG/3.5〜5.5mm 2 4mm 煞車電阻回路 B1、B2 10〜12AWG/3.5〜5.5mm 2 4mm 連動及故障回路M1、M2 S1、S2 RA 、RB 、RC20〜18AWG/0.25〜0.75mm 2 M1.M2.S1.S2需用隔離線2mmDELTA ELECTRONICS, INC. ALL RIGHTS RESERVEDVFDB-5基本配線圖動作說明:1. 在安裝制動單元的應用㆗為了安全的考量,在制動單元與煞車電阻之間加裝㆒積熱電驛(O.L );並與交流馬達驅動器前端的電磁接觸器(MC )作㆒連鎖的異常保護。
台达变频设定方法
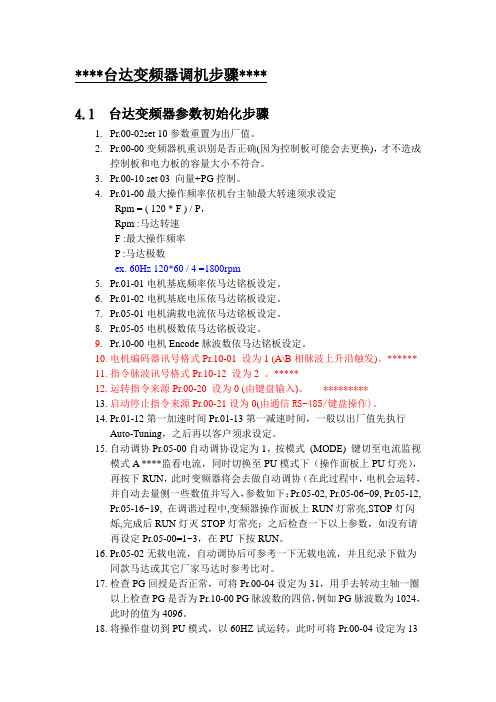
****台达变频器调机步骤****4.1 台达变频器参数初始化步骤1.Pr.00-02set 10参数重置为出厂值。
2.Pr.00-00变频器机重识别是否正确(因为控制板可能会去更换),才不造成控制板和电力板的容量大小不符合。
3.Pr.00-10 set 03 向量+PG控制。
4.Pr.01-00最大操作频率依机台主轴最大转速须求设定Rpm = ( 120 * F ) / P,Rpm :马达转速F :最大操作频率P :马达极数ex. 60Hz 120*60 / 4 =1800rpm5.Pr.01-01电机基底频率依马达铭板设定。
6.Pr.01-02电机基底电压依马达铭板设定。
7.Pr.05-01电机满载电流依马达铭板设定。
8.Pr.05-05电机极数依马达铭板设定。
9.Pr.10-00电机Encode脉波数依马达铭板设定。
10.电机编码器讯号格式Pr.10-01 设为1 (A\B相脉波上升沿触发)。
******11.指令脉波讯号格式Pr.10-12 设为2 。
*****12.运转指令来源Pr.00-20 设为0 (由键盘输入)。
*********13.启动停止指令来源Pr.00-21设为0(由通信RS-485/键盘操作)。
14.Pr.01-12第一加速时间Pr.01-13第一减速时间,一般以出厂值先执行Auto-Tuning,之后再以客户须求设定。
15.自动调协Pr.05-00自动调协设定为1,按模式(MODE) 键切至电流监视模式A ****监看电流,同时切换至PU模式下(操作面板上PU灯亮),再按下RUN,此时变频器将会去做自动调协(在此过程中,电机会运转,并自动去量侧一些数值并写入,参数如下:Pr.05-02, Pr.05-06~09, Pr.05-12,Pr.05-16~19, 在调谐过程中,变频器操作面板上RUN灯常亮,STOP灯闪烁,完成后RUN灯灭STOP灯常亮;之后检查一下以上参数,如没有请再设定Pr.05-00=1~3,在PU下按RUN。
台达PLC控制伺服说明

14应用指令简单定位设计范例14.1 台达ASDA伺服简单定位演示系统X1伺服电机Y0脉冲输出Y1正转反转/Y4脉冲清除DOP-A人机ASDA伺服驱动器WPLSoft【控制要求】z由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
z监控画面:原点回归、相对定位、绝对定位。
【元件说明】PLC软元件说明M0 原点回归开关M1 正转10圈开关M2 反转10圈开关M3 坐标400000开关M4 坐标-50000开关M10 伺服启动开关M11 伺服异常复位开关M12 暂停输出开关(PLC脉冲暂停输出)M13 伺服紧急停止开关X0 正转极限传感器X1 反转极限传感器X2 DOG(近点)信号传感器X3 来自伺服的启动准备完毕信号(对应M20)X4 来自伺服的零速度检出信号(对应M21)X5 来自伺服的原点回归完成信号(对应M22)X6 来自伺服的目标位置到达信号(对应M23)X7 来自伺服的异常报警信号(对应M24)Y0 脉冲信号输出14应用指令简单定位设计范例Y1 伺服电机旋转方向信号输出Y4 清除伺服脉冲计数寄存器信号Y6 伺服启动信号Y7 伺服异常复位信号Y10 伺服电机正方向运转禁止信号Y11 伺服电机反方向运转禁止信号Y12 伺服紧急停止信号M20 伺服启动完毕状态M21 伺服零速度状态M22 伺服原点回归完成状态M23 伺服目标位置到达状态M24 伺服异常报警状态【ASD-A伺服驱动器参数必要设置】参数设置值说明P0-02 2伺服面板显示脉冲指令脉冲计数P1-00 2外部脉冲输入形式设置为脉冲+方向P1-01 0位置控制模式(命令由外部端子输入)P2-10 101当DI1=On时,伺服启动P2-11 104当DI2=On时,清除脉冲计数寄存器P2-12 102当DI3=On时,对伺服进行异常重置P2-13 122当DI4=On时,禁止伺服电机正方向运转P2-14 123当DI5=On时,禁止伺服电机反方向运转P2-15 121当DI6=On时,伺服电机紧急停止P2-16 0无功能P2-17 0无功能P2-18 101当伺服启动准备完毕,DO1=OnP2-19 103当伺服电机转速为零时,DO2=OnP2-20 109当伺服完成原点回归后,DO3=OnP2-21 105当伺服到达目标位置后,DO4=OnP2-22 107当伺服报警时,DO5=OnÚ当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
台达PLC编程设计实例

调试过程
在模拟环境中进行测试,确保程序逻辑 正确无误,然后在实际设备上进行调试 ,确保电机能够按照要求进行启停。
实例二:温度控制系统
通过台达PLC编程实现
总
对温度的控制,实现温结度的精确调节。 Nhomakorabea词
使用台达PLC编程软件,
设 计
2. 熟悉台达PLC在工业控制中的应用 场景;
3. 培养读者分析和解决实际问题的能 力;
4. 为读者在实际工作中应用台达PLC 技术提供参考和借鉴。
02 台达PLC基础知识
台达PLC简介
定义
台达PLC,全称为台达可编程逻辑控制器,是一种工业自动化 控制设备,用于执行顺序控制、逻辑运算、计数、定时等操作, 并通过数字或模拟输入/输出控制各种类型的机械或生产过程。
应用领域
广泛应用于电力、石油、化工、钢铁、有色金属、采矿、环 保、建材、造纸、汽车制造、包装、食品加工等工业领域。
台达PLC编程语言
1 2
指令表编程语言
使用类似于助记符的形式编写程序,如LD (Load)、AND(AND)、OUT(Output) 等。
顺序功能图编程语言
使用图形化方式描述控制系统的流程和功能,易 于理解和维护。
故障或安全事故。
易用性和可维护性
程序应具备良好的用户界面和易于维 护的特点,方便操作人员使用和工程
师维护。
兼容性和可扩展性
在编写程序时应考虑未来可能的硬件 升级或扩展,保证程序的兼容性和可 扩展性。
数据安全和隐私保护
在程序中应采取必要的数据加密和隐 私保护措施,确保数据的安全性和隐 私不被侵犯。
05 结论
如何实现ABC三台电机一键顺序启动和一键逆序停止的控制?

如何实现ABC三台电机一键顺序启动和一键逆序停止的控制?如何实现ABC三台电机一键顺序启动和一键逆序停止的控制?答;下图就是三台电机一键顺序启动和一键逆序停止电路图。
本电路具有顺序启动、逆序停止控制,逆序启动、逆序停止控制,任意启动、任意停止控制三种控制功能。
(1)顺序启动、顺序停止控制时,选择开关SA1 (1-41)、SA2 (1-43)全部断开。
顺序启动时,按下第一台电动机M1启动按钮SB2 (3-5),交流接触器KM1线圈得及合且KM1辅助常开触点(3-9)闭合自锁,KM1三相主触点闭合,第一台电动机M1 得电启动运转。
与此同时,KM1的一组辅助常开触点(21-23)闭合,为第二台电动机 M2动控制交流接触器KM2线圈回路提供准备条件; KM1的另一组辅助常开触点(25-27) 闭合将,将第二台电动机M2停止按钮SB3(1-15) 回路给短接起来,限制其停止操作,为顺序停止提供准备条件。
当电动机M1启动运转后,方可对第二台电动机M2控制回路进行启动操作。
按下第二台电动机M2启动按钮SB4 (15-17),交流接触器KM2线圈得电,吸合且KM2辅助常开触点(15-23)闭合自锁,KM2三相主触点闭合,第二台电动机M2得电启动运转。
与此同时KM2的其它四组辅助常开触点(7-9、3-11、33-35、37-39)均闭合。
其中,常开触点(7-9)闭合,在顺序启动、顺序停时无用;常开触占(3-11)闭合,在顺序启动、顺序停止时无用;常开触点(33-35)闭合,为第三台电动机M3启动控制交流接触器KM3线圈回路提供准备条件;常开触点(37-39) 闭合,将第三台电动机M3停止按钮SB5(1-29) 回路给短接起来,限制其停止操作,为顺序停止提供准备条件。
当电动机M2启动运转后,方可对第三台电动机M3控制回路进行启动操作。
按下第三台电动机M3启动按钮SB6 (29-31),交流接触器KM3线圈得电吸合且KM3辅助常开触点(29-35)闭合自锁,KM3三相主触点闭合,第三台电动机M3得电启动运转。
台达变频器以及台达PLC通讯功能的实现
台达变频器以及台达PLC通讯功能的实现1 引言plc和变频器是自动化设备上最常见的部件。
其最初的控制型式大多是用plc的i/o点和模拟量模块直接控制变频器的启停和实现调速,但这种控制方式有两大弊端,最大的弊端是占用plc的i/o点和需要增加昂贵的模拟量模块,造成控制成本的增加。
当被控制的变频器数量较多时,此弊端更是明显。
第二个弊端是模拟量控制容易受干扰,传输距离也容易受限制。
近几年来自动化产品不断更新换代,性能不断提升,功能日益强大。
在小型plc方面这个变化更加明显,现在的小型plc不仅执行速度大大提高,指令功能日益丰富,更重要的是大都支持多种通讯协议,并提供了更多的通讯接口。
同时大多的变频器也具有了rs485接口,也能支持多种通讯协议,最常见的就是modbus协议。
这种技术的进步为plc和变频器通讯的实现,提供了软件上的协议和硬件上的物理接口,从而为低成本高性能的通讯控制的实现打下了良好的基础。
2 通讯相关的基础知识2.1 通讯协议communications protocol通信协议是指通信双方的一种约定。
这个约定包括对数据格式、同步方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。
因此,也叫做通信控制规程,或称传输控制规程。
modbus协议是工业控制器中使用较普遍的一种网络协议。
通过此协议,各种控制器之间(比如plc、变频器、伺服驱动器、各种智能仪表)、控制器通过其它网络(比如以太网)和其它设备之间都可以通信交换信息。
该协议定义了一个控制器可以识别的信息架构,从而使不同厂商生产的支持此协议的各种工控产品可以连接到一个网络上进行集中控制和信息交换。
2.2 rs485接口的特点rs485接口是在大家熟知的rs232接口的基础上推出的性能更优的一种串口。
由于rs485接口具有良好的抗噪声干扰性,长的传输距离和多站功能等优点,它成为应用越来越广泛的串行接口。
FANUC机器人操作说明书
控制装置上所使用的断路器,可以通过上锁来禁止通电。
(9) 在进行外围设备的个别调试时,务必断开机器人的电源后再执行。 (10) 在使用操作面板和示教器时,由于戴上手套操作有可能出现操作上的失误,因此,务必在摘下手套后再进行作业。 (11) 程序和系统变量等的信息,可以保存到存储卡等存储介质中(选项)。为了预防由于意想不到的事故而引起数据丢失
全开关等)的位置和状态等。 (4) 程序员应特别注意,勿使其他人员进入机器人的动作范围。 (5) 编程时应尽可能在安全栅栏的外边进行。因不得已情形而需要在安全栅栏内进行时,应注意下列事项。
- 仔细察看安全栅栏内的情况,确认没有危险后再进入栅栏内部。 - 要做到随时都可以按下急停按钮。 - 应以低速运行机器人。 - 应在确认清整个系统的状态后进行作业,以避免由于针对外围设备的遥控指令和动作等而导致作业人员陷入危
我公司的示教器上,除了急停按钮外,还配设有基于示教器的机器人作业的有效/无效开关和安全开关。其动作根据下 列情况而定。
(1) 急停按钮:只要按下急停按钮,机器人就会急停。(有关停止方法的详情,请参阅为了安全使用的“机器人的停 止方法”)。
(2) 安全开关:其动作根据有效/无效开关的状态而不同。 (a) 有效时:从安全开关松开手,或者紧握该开关,即可断开伺服电源。 (b) 无效时:安全开关无效 注释) 安全开关,是为了在紧急情况下从示教器松开手、或者用力将其握住以使机器人急停而设置的。 R-30iB/R-30iB Mate 采用 3 位置安全开关,只要推入到 3 位置安全开关的中间点,就可使机器人动作。从 安全开关松开手,或者用力将其握住时,机器人就会急停。
台达工控产品canopen解决方案

台达工控产品canopen解决方案台达工控产品CANopen解决方案台达工业自动化应用技术中心左涛摘要:本文主要阐述台达工控产品CANopen解决方案,从而展示出台达工控产品在现代总线技术中良好的兼容特性。
Abstract: In this paper, the solution in CANopen for Deltaindustrial products is presented, whichdisplays the nice compatibility in the modern field-bus control.1、引言CANopen是一种架构在控制器区域网络 (Controller Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定,其处理芯片采用同步或异步通讯方式,可实现一定范围内的同步通讯控制,并减少无谓的数据重复发送,其通讯速率可达到1M bps,在节约资源的同时有利实现工控运动控制特性,是当前工业自动化最为常见的总线技术之一。
2、台达工控产品在CANopen中的应用2.1支持CANopen之台达工控产品分类当前台达工控产品可分为驱动类、控制类和运动控制类。
其中,驱动类主要为变频器和不具备运动控制功能的伺服驱动器,而控制类主要有触摸屏、PLC,运动控制类有A2伺服、20PM以及10MC。
当前,这些产品在CANopen较常见的为驱动类和控制类以及A2伺服,而20PM可支持CANopen扩展卡但是其主要特色在于实现运动控制G代码和电子凸轮,在DS402标准CANopen运用20PM的优劣仍不明显,因此暂不做分析。
同理10MC仍在测试中,因此也不考虑。
本文介绍的台达工控产品均为成熟的并有在CANopen应用中的价值体现的产品。
其汇总如下:图1 台达支持CANopen之工控产品总汇图1中,需要特别重视的产品有DVPCOPM-SL、C2000、E-C以及A2伺服。
台达DTA9696温控表最新说明书

0°C ~ 50°C
-20°C ~ +65°C
2,000 公尺
35% ~ 85% RH(无结露)转控制相关参数设定
显示器
说明
RUN/STOP:设定控制动作开始( )或停止(
)
ALARM1 HIGH:第一组警报上限设定
ALARM1 LOW:第一组警报下限设定
ALARM2 HIGH:第二组警报上限设定
白金测温电阻:Pt100, JPt100
0.1% 全刻度
PID 或 ON/OFF 或手动输出
继电器输出,交流 250V,5A,单刀双闸(4848 为单刀单闸)
电压脉冲输出,直流 14V,最大输出电流 40mA
电流输出,直流 4 ~ 20mA 输出(负载阻抗需小于 600Ω)
0.5 秒 10 ~ 55Hz 10m/s2 3 轴方向 10min 最大 300m/ s2 3 轴 6 方向 各 3 次
设定温度单位
按V 按V
-3-
调整模式
运转模式
设定模式
PID Ti 值设定 (PID 控制时设定)
警报 1 上限设定 (ALA1 设定警报 1 上限有效时可调)
按V
按V
设定温度范围上限
按V
PID Td 值设定(PID 控制时设定)
警报 1 下限设定
(ALA1 设定警报 1 下限有效时可调)
按V
按V
设定温度范围下限
控制输出种类
采样周期 耐震动 耐冲击 操作环境温度 存放环境温度 操作高度 操作环境湿度 面板防护等级
交流电 100 ~ 240V, 50/60Hz
额定电压 85% ~110%
5VA Max.
七段 LED 显示; 目前温度值:红色,设定温度值:绿色
台达 VFD-EL-W 小型泛用无感测向量变频器 安装说明说明书

VFD-EL-W 安装说明小型泛用无感测向量变频器请在装机之前,详细阅读本产品说明,并请妥善保存。
变频器乃精密的电力电子产品,为了操作者及机械设备的安全,请务必交由专业的电机工程人员安装试车及调整参数,本产品说明中有 [ 危险(DANGER) ]、[ 注意(CAUTION) ] 等符号说明的地方,请务必仔细研读,若有任何疑虑的地方请联络本公司各地的代理商洽询,我们的专业人员会乐于为您服务。
请用户在操作本产品时,特别留意以下各事项☑变频器的内部电路板上各项电路组件易受静电的破坏,在未做好防静电措施前,请勿用手触摸电路板。
☑禁止自行改装变频器内部的零件或线路。
☑变频器端子务必依照当地法规正确的接地。
☑变频器及配件安装场合,应远离火源发热体及易燃物。
☑变频器所安装之电源系统额定电压如下,请勿超过此适用范围:1. 230V系列机种之变动范围为180V–264V。
2. 460V系列机种之变动范围为342V–528V。
☑只有合格的电机专业人员才可以安装、配线及维修变频器。
☑即使三相交流马达是停止的,变频器的主回路端子仍然可能带有危险的高压。
☑电解电容若长期不通电,其性能会下降,故长期放置不用的变频器必须每2年通电3–4小时左右(注),以恢复变频器内部电解电容的性能。
注:变频器送电时,必须用可调的AC电源(例如:AC自耦变压器) 以70–80%的额定电压上电30分钟(不要运行),然后再以额定电压上电1小时(不要运行),使变频器内部电解电容的性能恢复,再开始运行变频器,不可直接以额定电压送电运行。
☑运送、安装时的外箱包装(含木箱、木条等) 除虫处理注意事项:1. 包装用的木材等包材若需要进行除虫等,禁止使用蒸熏方式。
若因此造成机器损毁,不列为保固范围内。
2. 请采用其他方式,如木箱热处理或其他非蒸熏方法以进行除虫等环境清除作业。
3. 使用木箱热处理方式时:将包材置于温度56°C以上的环境中且连续保持30分钟以上即可。
台达伺服外部使能参数

台达伺服外部使能参数全文共四篇示例,供读者参考第一篇示例:台达伺服外部使能参数是控制伺服系统内部工作的一个重要参数,也是实现伺服系统正常运行的关键之一。
在伺服系统中,外部使能参数是指通过外部控制信号来开启或关闭伺服系统的功能,以实现对伺服系统的启停控制。
台达伺服外部使能参数主要包括使能信号的输入、输出和延时等设置。
使能信号的输入指的是来自外部设备的控制信号,用于开启或关闭伺服系统的功能。
使能信号的输出则是指伺服系统工作状态的反馈信号,反映了伺服系统是否处于工作状态。
在台达伺服系统中,用户可以根据具体应用需求设置使能信号的输入输出参数,以实现对伺服系统的灵活控制。
延时参数是指在使能信号发生改变后,伺服系统响应的时间延迟。
延时参数的设置可以保证伺服系统在启动或停止时的平稳运行,避免因突然启停引起的冲击和损坏。
通过合理设定延时参数,可以确保伺服系统在各种工作情况下都能够稳定运行,提高工作效率和产品质量。
在实际应用中,台达伺服外部使能参数的设置涉及到多方面的因素,如控制环境、工作要求、安全标准等。
需要根据具体的应用场景和要求,结合对伺服系统性能的理解和掌握,合理设置外部使能参数,以确保伺服系统的稳定运行和高效工作。
在进行台达伺服外部使能参数的设置时,还需要考虑到系统的可靠性和安全性。
设置使能参数时要严格按照厂家提供的技术规格和使用说明进行,避免参数设置错误导致系统运行异常或损坏。
在操作过程中要严格遵守安全操作规程,确保人员和设备的安全。
第二篇示例:台达伺服驱动器是一种高性能的伺服系统,广泛应用于各种自动化设备和机械系统中。
在使用台达伺服驱动器时,外部使能参数是至关重要的设置项之一,它可以帮助用户灵活地控制伺服系统的启停状态。
本文将详细介绍台达伺服外部使能参数的作用、设置方法以及注意事项。
一、外部使能参数的作用外部使能参数是指通过外部信号来控制伺服系统的启停状态。
在实际应用中,许多伺服系统需要通过外部信号来实现远程启停控制,以便更好地适应不同的工作环境和需求。