拉普拉斯变换 例题解析
5.3 拉普拉斯变换的性质及应用

F (s s0 )的ROC : Re[ s s0 ] 1 即 Re[ s] 1 Re[ s0 ]
5.3 拉普拉斯变换的性质及应用
4. 复频移特性 例5.3-3 求 e 解: 因为
- at
sin wt 和 e-at coswt 的拉氏变换。
s 例5.3-2: 已知因果函数f(t)的象函数 F ( s) = 2 ,求f(2t)的象 s +1 函数。
解:
s f (t ) « 2 s +1
Re[ s] > 0
f (at ) 1 s F Re[ s] a 0 a a
由尺度变换性质有:
s 1 s 2 f (2t ) « × = 2 2 2 æsö s +4 ç ÷ +1 è2ø
f (t )
0
s f (t )e st dt
0
sF (s) f (0 )
f
(2)
Re[ s] 0
d (1) (t ) f (t ) dt
LT [ f ( 2) (t )] s[sF (s) f (0 )] f (1) (0 ) s 2 F (s) sf (0 ) f (1) (0 )
Re[ s] 0
LT [ f (3) (t )] s[s 2 F (s) sf (0 ) f (1) (0 )] f ( 2) (0 ) s 3 F (s) s 2 f (0 ) sf (1) (0 ) f ( 2) (0 )
Re[ s] 0
a 0, b 0, 求f1(t)的象函数。
解:
L f t f t u t F s
第四章拉普拉斯变换与S域分析
第二种情况:极点为共轭复数
共轭极点出现在
求f(t)
例题
另一种方法
求下示函数F(s) 的逆变换f(t): 解:F(s)具有共轭极点,不必用部分分式展开法
求得
部分分式展开法
(3)极点包含多重根的情况 (k重根p1 )
A( s ) F ( s) k ( s p1 ) D( s )
其中D(s)为分母除去多重根剩余 部分
证明:
推广:
电感元件的s域模型
设 应用原函数微分性质
三.原函数的积分
证明:
① ②
① ②
电容元件的s域模型
四.延时(时域平移)
证明:
例题 4-3-1
已知
证明:
例4-6
求 e α t cosω0 t的拉氏变换
s 已知 : Lcosω0 t u( t ) 2 s ω02
所以 e
其中k1 sF ( s ) s 0 10( s 2)( s 5) ( s 1)( s 3) 100 3
s 0
举例4.1:
解:k2 ( s 1) F ( s ) s 1 10( s 2)( s 5) ( s 3) 20
s 1
k3 ( s 3) F ( s ) s 3 10( s 2)( s 5) s( s 1) 10 3
部分分式展开法
A( s ) 设F ( s ) 1 D( s )
F1 ( s ) 则F ( s ) ( s p1 ) k
分解
K1i K11 k ( s p1 ) ( s p1 ) k i 1 K1k s p1
部分分式展开法
1 d i 1 其中K1i i 1 F1 ( s) s p 1 (i 1)! ds
第十四章拉普拉斯变换
第十四章 拉普拉斯变换典型例题例14-1 求以下函数的象函数。
(1)单位冲激信号()t δ (2)单位阶跃信号()t ε (3)单边指数信号()t e at ε- (4)单边正弦信号()t t εωsin 解(1) 单位冲激信号()t δ的象函数()()[]()10=====--∞⎰-t stst e ds e t t L s F δδ即 ()1↔t δ (14-5) 可以看出,按拉氏变换定义式(14-1)进行计算,能计及t=0时()t f 中所包含冲激函数。
(2) 单位阶跃信号()t ε的象函数()()[]()se s ds e ds e t t L s F st st st 11000=-====∞-∞--∞⎰⎰-εε即 ()st 1↔ε (14-6)由于()t f 的单边拉氏变换其积分区间为[)∞-,0,故对定义在()∞∞-,上的实函数()t f 进行单边拉氏变换时,相当于()()t t f ε的变换。
所以常数1的拉氏变换与()t ε的拉氏变换相同,即有 s 11↔同理,常数A 的拉氏变换为 sAA ↔ (14-7)(3)指数信号()t eatε-的象函数()()[]()as dt e dt e e t e L s F t s a st at at +====⎰⎰∞+-∞-----10ε 即 ()as t e at+↔-1ε (14-8) 同理()as t e at -↔1ε(4) 单边正弦信号()t t εωsin 的象函数 由于 ()t j tj e e jt ωωω--=21sin 故()()[]()()22112121sin ωωωωεεωωω-=⎪⎪⎭⎫ ⎝⎛+--=⎥⎦⎤⎢⎣⎡-==-s j s j s j t e e j L t t L s F t j t j 即 ()22sin ωωεω-↔s t t (14-9)例14-2 求单边余弦信号()t t εωcos 的象函数。
拉普拉斯变换实验报告答案
评分:《信号与系统》实验报告实验题目:拉普拉斯变换实验班级:姓名:学号:指导教师:实验日期:拉普拉斯变换实验一、实验目的:1、了解拉普拉斯变换及其逆变换的符号方法;2、了解由系统函数零、极点分布决定时域特性,并绘制出图形;3、了解由系统函数零、极点分布决定时域特性,并绘制出图形。
二、实验设备:多媒体计算机,matlab软件。
三、实验内容:1.例题4-8 求下示函数的逆变换F(s)=10(s+2)(s+5)/s(s+1)(s+3)该题中,所编程序为:clear all, close all, clc; %清除所有变量并清除屏幕内容syms s; %定义系统sf = ilaplace(10*(s+2)*(s+5)/s/(s+1)/(s+3)) %进行拉式变换实验结果:f =100/3 - (10*exp(-3*t))/3 - 20*exp(-t)2.例题4-9 求下示函数的逆变换F(s)=(s^3+5s^2+9s+7)/(s+1)(s+2)该题中,所编程序为:clear all, close all, clc; %清除所有变量并清除屏幕内容b = [1,5,9,7]; %函数分子的系数a1 = [1,1]; %函数分母第一个因式的系数a2 = [1,2]; %函数分母第二个因式的系数a = conv(a1,a2); %令a的值使a1,a2收敛[r,p,k] = residue(b,a) %是函数部分分式展开运行结果为:r =-12p =-2-1k =1 23.例题4-10 求下示函数的逆变换F(s)=(s^2+3)/(s^2+2s+5)(s+2)该题中,所编程序为:clear all, close all, clc; %清除所有变量并清除屏幕内容b = [1,0,3]; %函数分子的系数a1 = [1,2,5]; %函数分母第一个因式的系数a2 = [1,2]; %函数分母第二个因式的系数a = conv(a1,a2); %令a的值使a1,a2收敛[r,p,k] = residue(b,a) %是函数部分分式展开运行结果为:r =-0.2000 + 0.4000i-0.2000 - 0.4000i1.4000p =-1.0000 + 2.0000i-1.0000 - 2.0000i-2.0000k =[]4.例题4-12 求下示函数的逆变换F(s)=(s-2)/s(s+1) ^3该题中,所编程序为:clear all, close all, clc; %清除所有变量并清除屏幕内容b = [1,-2]; %函数分子的系数a1 = [1,0]; %函数分母第一个因式的系数a2 = [1,1] %函数分母第二个因式的系数a = conv(conv(a1,a2),conv(a2,a2)); %令a的值使a1,a2收敛的收敛[r,p,k] = residue(b,a) %是函数部分分式展开运行结果为:r =2.00002.00003.0000-2.0000p =-1.0000-1.0000-1.0000k =[]5.例题4-17图4-17所示电路在t=0时开关S闭合,接入信号源e(t)=VmSIN(wt),电感起始电流等于零,求电流i(t)。
考研高数总复习Laplace变换性质(讲解)

0
sin t dt t
0
1 π d s arctan s |0 2 s 1 2
四、位移性质 若L [f (t)]=F (s), 则有 L [eat f (t)]=F (s-a) (Re (s-a)>c)
证明:
根据Laplace变换式, 有
at
求L [ea t t m].
m
( m 1) 利用位移性质, , 已知 L [ t ] m 1 s
可得:
( m 1) L [e t ] m 1 (s a)
at m
求L [e –at sin k t].
k 已知 L [sin kt ] 2 , 利用位移性质, 2 s k
t t L d t d t 0 0 n次 1 f (t ) d t n F ( s) s
t 0
三、积分性质
由Laplace变换存在定理, 可得象函数积分 性质: 若L [f (t)]=F (s), 则
f (t ) L t
L f (t k ) L [ f (t k )] k 0 k 0
F ( s )e ks
k 0
,有 0
1 F ( s) (Re( s ) c ) s 1 e
求如图所示的单个半正弦波 的Laplace变换. f t
由象函数的微分性质,有
d k L [t sin kt ] 2 ds s k 2
k L [sin kt ] 2 s k2
同理
s
2ks
2
k2
2
(Re( s ) 0)
拉普拉斯变换详解
s2 s2
s
例3 求周期函数的拉氏变换
解
设f1(t)为第一周函数
[ f1(t )] F1(s)
f(t) 1
T/2 T
... t
则:
1 [ f (t )] 1 esT F1(s)
证:f (t) f1(t) f1(t T )ε(t T )
f1(t 2T )ε(t 2T )
[ f (t )] F1(s) esT F1(s) e2sT F1(s)
S
校验:
U(S)
1
S(1 SRC )
u(0
)
lim
s
S
S(1
1 SRC
)
lim
s
(1
1 SRC
)
0
u() lim 1 1 s0 (1 SRC )
小结: 积分
(t) (t)
t (t ) t n (t)
1
1
1
n!
S
S2 S n1
微分
sint (t)
S2 2
e-tt n (t )
)
例3 求 : f (t) teat的象函数
解
[te αt ] d ( 1 ) 1
ds s α (s α)2
3.积分性质
设: [ f (t)] F (s)
则:
t
1
[ 0
f
(t)dt]
s
F(s)
证:令
t
[ 0
f
(t)dt]
φ( s )
[ f (t)]
d dt
t
0
f
(t )dt
(s
p
)
kn
s pn
f
考研高数总复习Laplace变换应用(讲解)

dY ds (分离变量法) Y s2
第 9页
积分得
lnY ( s)ห้องสมุดไป่ตู้ ln 2 s ln C ,
C Y s s2
得
取逆变换得
y t Ce 2t .
下面确定 C . 令 t 0 得 1 y 0 C .
2t y t e . 得
2 s 1 Y s sX s s s 1 1 2 sY s s 1 X s 2 s s 1
第25页
1 解得 Y s 2 s s 1 X s 2s 1 2 s s 1 1 由 Y s 得 2 s s 1
t0
0
对方程的两边取Laplace变换,得
RCsU C s U C s L e t
L e t L U m sin t cos cos t sin
第17页
U m cos U m s sin 2 2 2 s s 2 Um 2 cos s sin 2 s Um cos s sin 得 RCsU C s U C s 2 2 s U m cos s sin 即 U s .
第10页
的解.其中 h t , f t 为定义在 0, 的已知函数.
求积分方程 y t h t 0 y t f d
t
设 L [ y(t )] Y ( s ), L [h( t )] H ( s ).
L [ f (t )] F ( s ). 对方程的两边取Laplace变换,得
拉普拉斯变换在求解微分方程中的应用

拉普拉斯变换在求解微分方程中的应用学生姓名:岳艳林班 级:物电系物本0801班学 号:0036 指导老师:韩新华摘要通过对拉普拉斯变换在求解常微分方程、典型偏微分方程中的应用举例,综合比较、归纳总结拉普拉斯变换在求解微分方程中的优势以及局限性。
关键词拉普拉斯变换 常微分方程 偏微分方程 引言傅里叶变换和拉普拉斯变换是常用的积分变换,但对函数进行傅里叶变换时必须满足很强的条件,于是人们将傅里叶变换进行改造便得到在物理和工程等领域有着广泛应用的拉普拉斯变换。
本文通过具体例子,重点讨论拉普拉斯变换在求解微分方程中的应用。
应用拉普拉斯变换求解微分方程的步骤如下:1、对线性微分方程中每一项进行拉氏变换,使微分方程变为s 的代数方程;2、解代数方程,得到有关变量的拉氏变换表达式;3、用拉氏反变换得到微分方程的时域解。
微分方程的解 取拉普拉斯逆变换解代数方程取拉普拉斯变换一、拉普拉斯变换以及性质。
1.拉普拉斯变换的定义。
傅里叶变换要求满足狄里希利和在+∞<<∞-t 内绝对可积,但是在物理、无线电技术等十几应用中,许多以时间t 为自变量的函数通常在t<0时不需要考虑或者没有意义,像这样的函数不能取傅里叶变换。
为避免上述两个缺点,将函数进行适当改造,便产生了拉普拉斯变换。
设函数f(t)(t ≥0)满足下列条件:⑴在区间[0,∞)上,除了有限个第一类间断点外,函数f(t)及它的导数)('t f 处处连续,即函数f(t)分段连续;⑵存在常数M >0和δ≥0,使对任何t 值(t ≥0),有| f(t)| <M tδe ,即随着t 的增大,函数| f(t)|的增大不比某个指数函数快,其中δ为其增长指数。
此时积分⎰+∞->+=0)0,(,)(c i c s dt et f stω在半平面Re(s)>c 上一定存在,在c c s >≥1)Re(上绝对且一致收敛。
则此积分所确定的函数⎰+∞-=)()(dt e t f s F st (t ≥0 )(在半平面Re(s)>c 内,F(s)为解析函数)称为f(t)的拉普拉斯变换(简称拉氏变换)或像函数,而f(t) 称为F(s)的拉普拉斯逆变换(简称拉氏逆变换)或原函数。
自动控制原理--拉普拉斯变换的4个例题讲解

2
4 3 12
F(s)
Cm (s-p1 )m
C m- 1 (s-p1 )m-1
C1 s-p1
Cm1 s-pm1
Cn s-pn
(s-p1 )m F(s) Cm Cm-1(s-p1 ) Cm-2(s-p1 )2 C1(s-p1 )m1
Cm1(s-p1 )m Cn(s-p1 )m
s-pm1
C(s)
bm sm ansn
bm1sm1 ... b1s b0 an1sn1 ... a1s a0
R(s)
r(t ) (t )
C(s)
bm sm ansn
bm1sm1 ... b0 an1sn1 ... a0
C1
s 1
C2
s 2
Cn
s n
L1 : c(t ) L1[C(s)] C1e1t C2e2t Cnent
F(s)
Cm (s-p1 )m
C m- 1 (s-p1 )m-1
C1 s-p1
Cm1 s-pm1
Cn s-pn
C
m
lim (s
s p1
p1
)m .F(s)
C m- 1
1 lim
1! s p1
d ds
(s
p1 )m .F(s)
C m-j
1
d( j)
j!
lim
s p1
ds j
(s
p1 )m .F(s)
f(t) 1 et 1 e3t 22
例3
已知 F (s)
s2 5s 5 s2 4s 3
,求
f (t) ?
解.
F(s)
(s2 4s 3) (s 2) s2 4s 3
第五章 拉普拉氏变换

第五章 拉普拉氏变换习题参考答案5.1 求下列信号的单边拉普拉斯变换,并注明收敛域。
(1)(1)u t + (2)22(e e )()t t u t -+ (3)(1)()t u t - (4)(1e )()t t u t -+ 解:(1)1(1):Re[]0S u t e ROC S S+↔> (2)2211(e e)():Re[]222ttu t ROC S S S -+↔+>-+(3)()()()()22R 1111 :e[]0St u t tu t u t ROC S S S S↔--=--=> (4)()()()()2111R 1(1) :e[]tt teu t u t te u t S S ROC S --+=+↔+-+>5.2求下列函数的单边拉普拉斯变换。
(1)0sin (1)(1)t U t ω-- (2)212e ett---+(3)2()e t t δ-- (4)3sin 2cos t t + (5)2e tt -(6)e sin(2)t t -解:(1)[]0022sin (1)(1)st U t e S ωωω---↔+ (2)()()()212112e e12t tSS S ---+↔-+++ (3)12()e21tt S δ--↔-+ (4)22232323sin 2cos 111S St t S S S ++↔+=+++ (5)221e(2)tt S -↔+(6)22e sin(2)(2)4tt S -↔++ 5.3 利用常用函数(如(),e (),sin()(),cos()()at u t u t t u t t u t ββ-等)的象函数及拉普拉斯变换的性质,求下列函数的拉普拉斯变换。
(1)[]e ()(2)t u t u t --- (2)[]sin()()sin (1)(1)t u t t u t ππ--- (3)(42)t δ- (4)sin(2)(2)44t u t ππ-- (5)0sin()tx dx π⎰ (6)22sin()()d t u t dtπ (7)22e ()t t u t - (8)e cos()()t t t u t αβ- 解:(1)[]222211e ()(2)(1e )111s ts e u t u t S S S -------↔-=-+++ (2)[]()()2221sin()()sin (1)(1)111SSt u t t u t e e SS ππππππ-----↔-=-+⎛⎫+ ⎪⎝⎭(3)121(42)4S t e δ--↔(4)822sin(2)(2)444S t u t e S πππ---↔+ (5)()2222111sin()tS x dx S S S S ππππππ↔-+=++⎰(6)2223322222222sin()()d t S S u t S dt S S S ππππππππππ--↔-==-+++ (7)2232e ()(2)tt u t S -↔+(8)()()2222222()ecos()()(())tS dS S t t u t dsS αααβαββαβ-++++-↔-=++ 5.4一个冲激响应为()h t 的因果LTI 系统具有下列特性:(1)t -∞<<+∞时,系统的输出为21()()e 6ty t =。
6-1拉普拉斯变换解析

拉普拉斯(Laplace)变换在电学、光学、力学等 工程技术与科学领域中有着广泛的应用。由于 它对原函数f(x)的条件比傅里叶变换的条件要 弱,因此在某些问题上,它比傅里叶变换的适 用面要广。 本部分首先从傅里叶变换的定义出发,导出拉 普拉斯变换的定义,并研究它的一些基本性质, 然后给出其逆变换的积分表达式——反演积分 公式,并得出原函数的求法,最后介绍拉普拉 斯变换的应用。
f (t ) H (t )e e
t it
it dt e d
0
1 2 0 1 it f ( p ) e d 2
f (t )e t e it dt eit d f (t )e ( i )t dt eit d ( p i,t 0)
(2)当t→∞时,f(t)的增长速度不超过某一指数 函数,即存在常数M >0及σ0≥0,使得
| f (t ) | Me 0t
0 t 0 H (t ) 1 t 0
得到 f (t ) (t ) H (t ),则根据傅氏变换理论有
F [ f (t )] F [ (t ) H (t )] 1 1 it (t ) H (t )e dt 2 2
0
f (t )e it dt
第六章 拉普拉斯变换
拉普拉斯变换理论(又称为运算微积分,或称为 算子微积分)是在19世纪末发展起来的。 首先是英国工程师亥维赛德(O.Heaviside) 发明 了用运算法解决当时电工计算中出现的一些问题, 但是缺乏严密的数学论证。 后来由法国数学家拉普拉斯(place)给出了 严密的数学定义,称之为拉普拉斯变换方法。
二、 拉普拉斯逆变换 实际f(t)的拉氏变换,就是 f (t ) H (t )et 的傅氏变 换,因此,当 f (t ) H (t )et ( 0) 满足傅氏积分定 理的条件时,根据傅里叶积分公式,f(t)在连续点 处有
拉普拉斯变换 例题解析
(2)复数模、相角
F(s) = Fx2 + Fy2 ∠F(s) = arctg Fy
Fx
(3)复数的共轭
F(s) = Fx − jFy
(4)解析:若 F(s)在 s 点的各阶导数都存在,称 F(s)在 s 点解析。
2 拉氏变换定义
F(s)
=
L[f
(t
)]
=
∫∞
0
f
(t
)
⋅
e
−st
dt
3 几种常见函数的拉氏变换
( ) L :
s2
+
2s
+
2
L(s)
=
2U a
(s)
=
2 s
L(s)
=
(s s2
2 + 2s
+
2)
L−1 : l(t) = L-1[L(s)]
复习拉普拉斯变换的有关内容
1 复数有关概念
(1)复数、复函数
复数
s = σ + jω
复函数 F(s) = Fx + jFy
例: F(s) = s + 2 = σ + 2 + jω
Tmω& m + ω m = k m u a
⎪⎧Tm ⎨
=
J mR [R ⋅ f m
+ CeCm ]
⎪k ⎩
m
=
Cm
[R
⋅fm
+ CeCm ]
时间函数 传递函数
(4)X-Y 记录仪(不加内电路)
⎧比较点 : Δu = u r - u p ⎪⎪放大器 : u a = k1 ⋅ Δu
⎪⎪电动机 ⎪⎨减速器
第十五章 拉普拉斯变换典型习题解答与提示.

第十五章 拉普拉斯变换典型习题解答与提示习 题 15-11.(1)提示:2()f t t =, £20[()]()ptpt f t f t edt t e dt +∞+∞--==⎰⎰,求广义积分后可得£32[()]f t p =,(0)p >; (2)提示:4()tf t e -=,£40[()]()pt t pt f t f t e dt e e dt +∞+∞---==⎰⎰,£1[()](4)4f t p p =>-+; (3)因302()12404t f t t t ≤<⎧⎪=-≤<⎨⎪≥⎩,则£242[()]()3(1)ptptpt f t f t edt edt e dt +∞---==+-⎰⎰⎰24024,(0)31,(0)pt pt p e e p p p --=⎧⎪=⎨-+≠⎪⎩4234,(0)4,(0)p pe e p pp --⎧+-≠⎪=⎨⎪=⎩; (4)因()tf t te -=, 则£2(1)(1)0001[()]()1ptp tp t f t f t edt tedt td e p +∞+∞--+-+⎛⎫===- ⎪+⎝⎭⎰⎰⎰ (1)(1)0111p t p t te e dt p p +∞+∞-+-+=-+++⎰ (1)21(1)(1)p tep p +∞-+=->-+21(1)(1)p p =>-+。
2.(1)£231[()](263)(0)f t p p p p=+->; (2)£2262[()](0)41pf t p p p =->++; (3)因()1tf t te =+,则£[()]f t =£(1)+£()tte1(1)[p=+-£()]t e ' (微分性) 222111(1)(1)(1)p p p p p p p -+=+=>--; (4)因3()sin 4tf t e t =,又因£24(sin 4)()16t F p p ==+,则由位移性知£24[()](3)(3)(3)16f t F p p p =-=>-+; (5)方法一 因22()tf t t e-=,又£232[]()(0)t F p p p ==>,则由位移性知 £32[()](2)(2)(2)f t F p p p =+=>-+; 方法二 因£21(),(2)2tep p -=>-+,则由微分性知 £2312[()](1)(2)2(2)f t p p p ''⎛⎫=-=>- ⎪++⎝⎭; (6)因21()sin (1cos 2)2f t t t ==-,则£1[()][2f t =£(1)-£22112(cos 2)](0)24(4)p t p p p p p ⎛⎫=-=> ⎪++⎝⎭; (7)因1()sin 2cos 2sin 42f t t t t ==, 则£1[()]2f t =£22142(sin 4)(0)21616t p p p =⨯=>++;(8)因()sin()sin cos cos sin f t t t t ωϕωϕωϕ=+=+, 则£[()]cos f t ϕ=£(sin )sin t ωϕ+£2222cos sin (cos )p t p p ωϕϕωωω=+++22cos sin (0)p p p ωϕϕω+=>+; (9)因11()(21)222f t t t t μμμ⎡⎤⎛⎫⎛⎫=-=-=- ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦, 则由延滞性知£121[()](0)p f t ep p-=>; (10)因3()sin 2tf t tet -=,又£22(sin 2)(0)4t p p =>+, 则由位移性知£322(sin 2)(3)(3)4t e t p p -=>-++,故再由微分性知 £22224(3)[()](3)(3)4[(3)4]p f t p p p '⎡⎤+=-=>-⎢⎥++++⎣⎦; (11)因4()cos 24tf t et π-⎛⎫=+ ⎪⎝⎭,又因£cos 242t π⎡⎤⎛⎫+= ⎪⎢⎥⎝⎭⎣⎦£222(cos 2sin 2)244p t t p p ⎫-=-⎪++⎝⎭2224p p -=+,则由位移性知£22[()](4)2(4)4p f t p p +=⨯>-++。
拉普拉斯变换在微分方程中的应讲解

指导老师:常莉红拉普拉斯变换在微分方程中的应用王彦朋(宝鸡文理学院 数学系,陕西 宝鸡 721013)摘 要: 利用了拉普拉斯变换及其它的性质,讨论了它在线性时不变系统的时域响应和电路分析中的应用.关键词:拉普拉斯变换;微分方程;电路分析随着计算机的飞速发展,系统分析和设计的方法发生了革命性的变化.原来用传统的模拟系统来进行的许多工作,现在都可能用数字的方法来完成.因此,数字电路、离散系统的分析方法就更显得很重要了.其中,拉普拉斯变换是分析这类系统极为有效的方法,从而给学习使用者在应用上带来很大的方便.1 拉普拉斯变换的定义定义[]1:设函数()f t 是定义在[]0∞,+上的实值函数,如果对于复参数s j βω=+,积分()()0e d st F sf t t +∞-=⎰在复平面s 的某一域内收敛,则称()F s 为()f t 的拉普拉斯变换(简称拉氏变换),记为()()F s L f t =⎡⎤⎣⎦;相应地,称()f t 为()F s 的拉普拉斯逆变换(简称拉氏逆变换),记为()()1f t L F s -=⎡⎤⎣⎦.有时我们也称()f t 与()F s 分别为象原函数和象函数.2 拉氏变换存在定理若函数()f t 满足下列条件:(1)在0t ≥的任何有限区间上分段连续;(2)当t →+∞时,()f t 具有有限的增长性,即存在常数0M >及0c ≥,使得()e ct f t M ≤ ()0t ≤<+∞(其中c 称为()f t 的增长指数).则象函数()F s 在半平面Re s c >上一定存在,且是解析的.3 拉普拉斯变换的性质(1) 线性性质:若()()()()1122,,L f t F s L f t F s ==⎡⎤⎡⎤⎣⎦⎣⎦ 12,a a 为任意常数,则有()()()()11221122L a f t a f t a F s a F s +=+⎡⎤⎣⎦.(2) 微分性质:若()[](),s F t f L =则()()()d 0d L f t sF s f t -⎡⎤=-⎢⎥⎣⎦.(3) 积分性质:若()[](),s F t f L =则()()01t L f t dt F s s⎡⎤=⎢⎥⎣⎦⎰.(4) 位移性质:若()[](),s F t f L =则()()e atL f t F s a -⎡⎤=+⎣⎦.(5) 延迟性质:若()[](),s F t f L =则当00t >时,有()()()000e st L f t t u t t F s ---=⎡⎤⎣⎦. (6) 卷积性质:若()()()()1122,,L f t F s L f t F s ==⎡⎤⎡⎤⎣⎦⎣⎦则有()()()()1212L f t f t F s F s *=⎡⎤⎣⎦.(7) 初值定理与终值定理:①初值定理: 若()[](),s F t f L =且()s sF s ∞→lim 存在,则()()0lim lim ,s t f t sF s +→∞→=或()()0lim s f sF s +→∞=. ②终值定理: 若()[](),s F t f L =且()s sF s ∞→lim 存在,则()()0lim lim ,t s f t sF s →∞→=或()()0lim s f sF s →∞=.4 拉普拉斯变换的应用4.1 利用拉普拉斯变换方法解线性微分方程这是拉普拉斯变换的一个最基本的应用.含有未知数()t f 及其各阶导数的方程称为微分方程.如果()t f 及其各阶导数都是一次的,则称之为线性微分方程.例 解微分方程()()()()()22d d 22e ,00,0 1.d d tf t f t f t f f t t-'-+=== 解 方程两端同时进行拉氏变换,得()()()211221s F s sF s F s s --+=+ 整理得()()()()()()22221117151551221111s s F s s s s s s s +-==-+++-+-+-+ ()s F 的反拉普拉斯变换就是原方程的解,即()()1117e e cos sin 555t t f t L F s t t --⎛⎫==+-+⎡⎤ ⎪⎣⎦⎝⎭. 从以上分析可知,所谓用拉普拉斯变换解决问题的方法,实质上就是把时间域里的问题变换到s 域去求解,最后通过反变换再返回时间域.上述拉普拉斯变换中的复数s (或s 域)常常称为复频率(或复频域). 4.2 利用拉普拉斯变换求解线性系统的响应这里讨论的范围,只限于线性系统.所谓系统,是用来处理各种输入信号的装置,这种处理可以用硬件来实现,如由各种电器元件组成的电路网络,机械元件组成的运动系统,都称为系统.这些系统的规律也可以用某中数学方法来描述,如电路方程,微分方程,硬件系统的传递函数(网络函数)等.这时,我们也称这些数学表达方式为系统.也就是说,系统也可以是指从实际物理元件组合中抽出来的数学规律.系统可以用软件表示,因为只要把这些规律掌握了,对实际系统的特性也就能充分地了解了.关于信号,在电路网络中就是指电压和电流.一般通指系统中一些变量和机械系统的位置、速度、压力和流量等等.设一个系统,在输入信号为()t f 1和()t f 2时的输出信号为()t y 1和()t y 2,若输入信号为()()t bf t af 21+时,其输出信号为()()t by t ay 21+(b a ,为常数),则这个系统为线性系统.如果系统的参数(如电阻、电容值等)是不随时间改变的,则称该系统为线性定常系统或线性时不变系统.利用拉普拉斯变换求线性系统的响应是其重要的应用之一.下面通过举例说明高阶微分方程的复频域解与状态方程的复频域解.4.2.1 高阶微分方程的复频域解对于线性系统,将微分方程的全解分解为零输入响应和零状态响应.其中,零输入响应是指没有外加激励信号的作用,仅由系统的储能元件的初始储能所引起的响应,用()zi r t 表示. 零状态响应是指系统初始条件为零(即系统中储能元件的初始储能为零)时,由外加激励信号()e t 产生的响应,用()zs r t 表示.系统的完全响应是零输入响应与零状态响应的和[]2,即()()()zi zs r t r t r t =+.例 系统的方程为()()()()()22d d d322,d d d r t r t r t e t e t t t t++=+()()()().00,10,='==---r r t u e t e t 求零状态响应、零输入响应和完全响应.解 由于()()e t e t u t -=是因果信号,且(),11+=s s E 用拉普拉斯变换求解. 设()(),s R t r ↔则()()()()10-=-↔'-s sR r s sR t r ()()()()()s s R s r sr s R s t r -='--↔''--2200系统方程两边同时进行拉普拉斯变换,有()()()()()231221s R s s sR s R s s E s -+-+=+⎡⎤⎣⎦求得()()()233122+++++=s s s s E s s R ()()233231222+++++++=s s s s s s E s ()()s R s R zi zs +=零状态响应的拉氏变换为()()s E s s s s R zs 23122+++=()()211121s s s s +=⋅+++ ()2313112+-++++-=s s s 则零状态响应为()()()2e 3e 3e t t t zs r t t u t ---=-+-零输入响应的拉氏变换为()21122332+-++=+++=s s s s s s R zi 则零输入响应为()()()22e e t t zi r t u t --=-完全响应的拉氏变换为()()()2222131543232121s s R s E s s s s s s s s ++--=⋅+=+++++++++ 完全响应为()()()()()2e 5e 4e t t t zi zs r t r t r t t u t ---=+=-+-通过上述例题分析可知:利用拉普拉斯变换求系统响应,需首先将描述系统输入输出关系的高阶微分方程逐项进行拉普拉斯变换,得到复频域的代数方程,求出代数方程的解答后,经过反变换即可得到时域解.4.2.2 状态方程的复频域解法 线性系统的状态方程的标准形式为()()()d d t A t B t tλλ=+ (1) 系统的输出方程为()()()y t C t D t λ=+(2) 式中,,,,A B C D 为系数矩阵;,y x λ,分别为状态变量、输出变量和系统的输入变量.对状态方程式()1两边作拉普拉斯变换,得()()()()0s s A s BX s λ-Λ-=Λ+式中,()()()();s L t X s L x t λΛ==⎡⎤⎡⎤⎣⎦⎣⎦上式经整理得()()()()()110s sI A sI A BX s λ---Λ=-+- (3)对输出方程式()2作拉普拉斯变换,将式()3代入其中,得()()()Y s C s DX s =Λ+()()()()110C sI A C sI A B D X s λ---⎡⎤=-+-+⎣⎦()()zi zs Y s Y s =+ (4)其中,()()10zi Y C sI A λ--=-为系统的零输入响应;()()1zs Y C sI A B D X s -⎡⎤=-+⎣⎦为系统的零状态响应.式()()34与式经拉氏反变换后,得到时域形式的解()()()()(){}1110t L sI A sI A BX s λλ----⎡⎤⎡⎤=-+-⎣⎦⎣⎦(5) ()()()()(){}1110y t L C sI A C sI A B D X s λ----⎡⎤=-+-+⎣⎦(6)比较式()5与状态方程的时域解,即()()()()0e 0e d tA t At t Bx τλλττ---=+⎰可见,状态转移矩阵()()111adj e At sI A L sI A L sI A ---⎡⎤-⎡⎤=-=⎢⎥⎣⎦-⎣⎦(7) 式中,()adj sI A -是()sI A -的伴随矩阵;sI A -是()sI A -的特征多项式.利用式()7可以较方便地计算出e ,At 从而可以求出系统的零输入响应与零状态响应.例 已知状态方程和输出方程中的各矩阵分别为,1021⎥⎦⎤⎢⎣⎡-=A 01,10B ⎡⎤=⎢⎥⎣⎦ ,1011⎥⎦⎤⎢⎣⎡-=C ,0101⎥⎦⎤⎢⎣⎡=D 输入矢量为()(),⎥⎦⎤⎢⎣⎡t t u δ初始状态为()(),01001211⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--λλ求输出().t y解 首先求e At 的拉普拉斯变换.由式()7有()1112e 01Ats L sI A s ----⎡⎤⎡⎤=-=⎢⎥⎣⎦+⎣⎦()()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--=⎥⎦⎤⎢⎣⎡--++-=110121110211112s s s s s s s 由()()()---=01λA sI C s Y zi 得系统零输入响应的复频域解,即()⎥⎥⎦⎤⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--⎥⎦⎤⎢⎣⎡-=01101110121110112z s s s s s Y i 系统零状态响应的复频域解()()1zs Y C sI A B D X s -⎡⎤=-+⎣⎦2121110110110111010101s s s s ⎧⎫⎡⎤⎡⎤⎪⎪⎢⎥⎡⎤⎡⎤⎡⎤⎪⎪--⎢⎥=+⎢⎥⎨⎬⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎢⎥⎪⎪⎣⎦⎢⎥⎪⎪+⎣⎦⎩⎭⎥⎥⎦⎤⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--=1101111s s s s s s⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-=1112s s因此得系统全响应的时域解为()()()11zi zs y t L Y s L Y s --=+⎡⎤⎡⎤⎣⎦⎣⎦e 2e 3e 0e e t t t t t --⎡⎤⎡⎤⎡⎤=+=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦()0≥t由上例可见,矩阵A 的特征值决定了系统的自由响度.实际上它们就是系统的固有频率,因此可根据A 的特征值来判断系统的特性.4.3 拉普拉斯变换在电路分析中的应用4.3.1 关于线性动态电路的s 域分析法动态电路的s 域分析法,是指应用拉普拉斯变换的电路模型法.其关键在于正确作出动态电路的s 域模型.作电路的s 域模型和进行s 域分析.应明确如下几点.1. s 域中的电压和电流在s 域模型中,时域电源激励函数变换为象函数,各支路电压用象函数表示.通常时域激励函数由查拉氏变换表得出它的象函数.电路中的电压和电流用它的象函数表示,如()()s U t u →,()()s I t i →,()()c c u t U s →,()()L L i t I s →等.2.R ,L ,C 元件的s 域形式及其s 模型 (1)电阻元件R 的s 域形式为()()U s RI s =,或()()s GU s I =s 域模型如图1()a ,()b 所示.(2)电感元件L 的s 域形式为()()()0L L L U s sLI s Li -=- 或()()()01L L L i I s U s sL s-=+ s 域模型如图2()a ,()b 所示.其中sL 称为复频域感抗,1sL称为复频域感纳.()-0L Li 是由电感元件初始状态产生的附加电压源复频域电压,与()s I L 为非关联参考方向;()0L i s -是由电感元件初始状态产生的附加电流源电流,与1sL中电流参考方向相同.(3)电容元件C 的s 域形式为()()01c c c u U I s sC s-=+ 或()()()0c c c I s sCU s Cu -=-其中,sC 1称为复频域容纳,()0c u s-是由电容元件初始状态产生的附加电压源复频域电压,与()s U c 参考方向一致,()-0c Cu 是由电容元件初始状态产生的附加电流源电流,与()s U c 为非关联参考方向.由于R ,L ,C 元件阻抗和导纳两种s 域模型,故一个时域动态电路便可以作出两种s 域模型.电路分析时宜采用哪一种s 域模型呢?应视电路的结构而定.一般而言,串联电路宜采用阻抗s 域模型,并联电路则宜采导纳抗s 域模型. 3.基尔霍夫定律的s 域形式[]3基尔霍夫定律包括基尔霍夫电流定律(KCL )和电压定律(KVL ). (1)KCL :在s 域中沿任一节点处各支路电流象函数的代数和为零,即()0I s =∑.(2)KVL :在s 域中沿任一闭合回路各支路电压象函数的代数和为零,即()0U s =∑.4. s 域阻抗与s 域导纳(1)零状态RLC 串联电路的s 域阻抗()s Z ,是各元件阻抗之和,即()1Z s R sL sC=++(2)零状态RLC 并联电路的s 域导纳()s Y ,是各元件导纳之和,即()1Y s G sC sL=++ (3)s 域阻抗与s 域导纳,是互为倒数的关系,即()()1Z s Y s =,或()()1Y s Z s =(4)s 域阻抗()s Z 与s 域导纳()s Y 两端电压和通过电流象函数()s U ,()s I 符合欧姆定律,称为欧姆定律的s 域形式,即()()()s I s Z s U =或()()()s U s Y s I =下面举例来说明线性动态电路的s 域分析法.例 应用s 域分析法求一般二阶电路的阶跃响应,如图-4()a 所示电路,求阶跃响应()u t 和()i t .图4.3.1-4解 (解题思路)本题是一般直流二阶电路求阶跃响应,即零状态响应.作s 域模型中没有附加电源.s 域分析计算的步骤是,首先做出时域电路的s 域模型,然后应用节点分析法求解出待求量的象函数,并将其展开为部分分式,最后反变换为时域响应.(解题方法)(1)作出时域电路的s 域模型如图4()b 所示.其电压源的象函数是,10s复频域感抗(),s s Z L =复频域容抗()1C Z s s=.(2)求电压(),t u 应用节点分析法,列出节点方程为()110111+=⎪⎭⎫⎝⎛+++s s s U s s 化简整理得()()()()j s j s s s s s s U ++-+=++=111022102js k j s k s k +++-++=11321 计算待定常数()522100201=++=•===s s s s s U s k()()()45251101112-<-=++=•-+=+-=+-=js j s j s s s U j s k 452523-<-==k k 进行拉氏变换得出()()()()15cos 45t u t L U s t t V ε--⎡⎤==-⋅⎡⎤⎣⎦⎢⎥⎣⎦(3)求()t i电路的s 域阻抗为 ()()111+++=s s s Z 故 ()()()()()22110111102+++=+++==s s s s s s s s Z S U s I S ()()()j s j s s s ++-++=11110js k j s k s k +++-++=11321计算待定常数()()5221100201=+++=•===s s s s s s I s k()()()()2111011451s js js k s j I s s s j =-+=-++=+-•==<-++3245k k ==<- ()5I s s =-⎢⎥⎢⎥⎣⎦进行反拉氏变换得出()()()()15cos 45t i t L I s t t A ε--⎡⎤==-⋅⎡⎤⎣⎦⎢⎥⎣⎦本文通过讨论了拉普拉斯变换在线性时不变系统的时域响应,对复频域求解代数方程,得出待求响应量的复频域函数,最后经拉氏反变换为所求解的时域响应.这种变换分析方法,其实质就是时域问题变换为复频域来求解,使分析计算易于进行.应用拉普拉斯变换分析动态电路,把时域电路直接变换为复频域电路,即s 域模型.根据s 域模型进行分析计算,得出响应量的s 域形式,最后反变换为时域响应.这种分析方法易于对任意函数激励的动态电路进行分析计算,是一种具有广泛意义的分析方法. 除了以上所述内容之外,拉普拉斯变换还有许多应用,例如数学上还可以用来解一类积分方程,偏微分方程等等.致谢:本文在撰写过程中得到常莉红老师的悉心指导,在此表示衷心的感谢!参考文献:[1] 华中理工大学数学系编著.复变函数与积分变换[M ].北京:高等教育出版社1997:210-211.[2] 姜建国,曹建中,高玉明编著.信号与系统分析基础(第二版)[M ].北京:清华大学出版社,2006:27-28.[3] 马金龙,胡建萍,王苑苹编著.信号与系统[M ].北京:科学出版社,2006:222-223.Laplace transform and Its Application in the differentialequationsWANG Yan-peng(Department of Mathematics, Baoji University of Arts and Sciences, Baoji 721013, Shaanxi,China)Abstract: Laplace transform and other application are utilized in the article,and then it is discussed to a linear not change the domain of the system and circuit analysis.Key words: Laplace transform; Differential equation;Circuit analysis宝鸡文理学院本科毕业论文任务书注:课题性质分为①理论型②实践应用型。
2.2_拉普拉斯变换
2.2.5 拉普拉斯反变换
例 求F(s)的拉氏反变换,已知
F s
s2
s
3 3s
2
解
F s
s2
s3 3s
2
(s
s3 1)(s
2)
1
s 1
2
s2
由留数的计算公式,得
1
[( s
1)
(s
s3 1)(s
2) ]s1
2
2
[( s
推广到n阶导数的拉普拉斯变换:
L
dn f dt
(t)
n
sn
F
(s)
s n1
f
(0)
sn2
f
(0)
sf (n-2) (0) f (n-1) (0)
如果:函数 f(t) 及其各阶导数的初始值均为零,即
f (0) f (0) f (0) f (n2) (0) f (n1) (0) 0
a1 a2 an s p1 s p2 s pn
式中,ak(k=1,2,…,n)是常数,系数 ak 称为极点 s= -pk 处的留数。
2.2.5 拉普拉斯反变换
ak 的值可以用在等式两边乘以 (s+pk),并把 s= -pk代入的方 法求出。即
ak (s pk )F (s) s pk
象函数 F(s) = L[f(t)]
5
t n (n=1, 2, …)
n! s n+1
6
e -at
7
sint
1 s+a
s2+2
拉普拉斯变换终值定理证明

拉普拉斯变换终值定理证明一、拉普拉斯变换终值定理设函数f(t)的拉普拉斯变换为F(s),如果sF(s)在s平面的右半平面及除原点外的虚轴上解析(即sF(s)的所有奇点均位于s平面的左半平面),则lim_{t→∞}f(t)=lim_{s→0}sF(s)。
二、证明过程1. 已知f(t)的拉普拉斯变换F(s)=∫_{0}^∞f(t)e^-stdt。
- 首先求f(t)的导数f^′(t)的拉普拉斯变换。
- 根据拉普拉斯变换的导数性质,L<=ft{f^′(t)right}=sF(s) - f(0),其中L<=ft{f^′(t)right}=∫_{0}^∞f^′(t)e^-stdt。
- 对L<=ft{f^′(t)right}进行反演积分表示:- L<=ft{f^′(t)right}=∫_{0}^∞f^′(t)e^-stdt=(1)/(2π j)∫_{σ - j∞}^σ + j∞(sF(s)-f(0))e^stds。
- 当t > 0时,f(t)=f(0)+∫_{0}^tf^′(τ)dτ。
- 考虑lim_{t→∞}f(t):- lim_{t→∞}f(t)=f(0)+lim_{t→∞}∫_{0}^tf^′(τ)dτ。
- 对∫_{0}^tf^′(τ)dτ进行拉普拉斯变换的反演:- ∫_{0}^tf^′(τ)dτ=(1)/(2π j)∫_{σ - j∞}^σ + j∞(sF(s)-f(0))/(s)e^stds。
- 现在求lim_{s→0}sF(s):- 由于sF(s)在s平面的右半平面及除原点外的虚轴上解析。
- 考虑lim_{s→0}sF(s),根据L<=ft{f^′(t)right}=sF(s)-f(0),当s→0时,lim_{s→0}sF(s)=lim_{s→0}(L<=ft{f^′(t)right}+f(0))。
- 因为L<=ft{f^′(t)right}=∫_{0}^∞f^′(t)e^-stdt,当s→0时,lim_{s→0}L<=ft{f^′(t)right}=∫_{0}^∞f^′(t)dt。
拉普拉斯变换的应用及综合举例
E (1 e R
R t L
.
).
17
例 质量为 m 的物体挂在弹簧系数为 k 的弹簧一端(如图),作用在物体上 的外力为 f ( t )。若物体自静止平衡 位置 x 0 处开始运动, 求该物体 的运动规律 x( t ) .
(跳过?)
(2) 求 Laplace 逆变换,得
3 t x ( t ) e 2t , 2
1 t 1 2 3 y( t ) e t . 2 2 2
14
P232 例9.24
(跳过?)
解 (1) 由于 f ( t ) sin t 0 f ( x ) sin(t x ) d x , 因此原方程为 f (t ) a t f (t ) sin t . (2) 令 F ( s)
R
R i (t ) L i (t ) E , i (0) 0 .
令 I ( s)
[ i (t ) ] , 在方程两边取 Laplace 变换得
E R I ( s ) L sI ( s ) , s
E 1 1 E 求解此方程得 I ( s ) R s s R s( R sL) L
解 (1) 由 Newton 定律及 Hooke 定律有
m x( t ) f ( t ) k x( t ) .
即物体运动的微分方程为
m x( t ) k x( t ) f ( t ) , x(0) x(0) 0 .
18
解 (1) m x( t ) k x( t ) f ( t ) , x(0) x(0) 0 .
A , 可见,在冲击力的作用下,运动为正弦振动,振幅为 m0 角频率为 0 , 称 0 为该系统的自然频率或固有频率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L⎢⎣⎡e −2t cos(5t
−
π 3
)⎥⎦⎤
=
⎧ L⎨e
⎩
−2t
cos⎢⎣⎡5(t
−
π 15
)⎥⎦⎤⎭⎬⎫
( ) =
⎧
π -s
⎨e 15
⎩
s2
s +
52
⎫ ⎬ ⎭s→s+2
− π (s+2)
= e 15 ⋅
s+2 s + 2 2 + 52
(5)终值定理(极限确实存在时)
lim f (t) = f (∞) = lim s ⋅ F(s)
( ) L :
s2
+
2s
+
2
L(s)
=
2U a
(s)
=
2 s
L(s)
=
(s s2
2 + 2s
+
2)
L−1 : l(t) = L-1[L(s)]
复习拉普拉斯变换的有关内容
1 复数有关概念
(1)复数、复函数
复数
s = σ + jω
复函数 F(s) = Fx + jFy
例: F(s) = s + 2 = σ + 2 + jω
ss
s
虚位移定理: [L eat ⋅ f (t)] = F(s - a)
(证略)
z 例 6:求 L[eat ]
[ ] [ ] 解 : L eat = L 1(t)⋅ eat = 1 s−a
[ ] z
例
7: L e-3t
⋅ cos5t
=
s2
s + 52
s→s+3
=
s+3
(s + 3)2 + 52
z
例
8:
[ ] ∴ f (t) = 1 1 − e−at a
微分方程一般形式:
C(n) + a1C(n-1) + L + a n-1C′ + C = b0r(m) + b1r(m-1) + L + bm-1r′ + bmr
L : (设初条件为0)
[ ] [ ] sn + a1sn-1 + a2sn-2 +L+ a n-1s + an C(s) = b0sm + b1sm−1 +L+ bm-1s + bm R(s)
=
1⎡ 2j ⎢⎣s
−1 − jω
e−(s− jω)t
∞ 0
−
s
−1 + jω
e−(s+ jω )t
∞⎤ 0 ⎥⎦
=
1 2j
⎡ ⎢⎣ s
1 − jω
−
s
1 + jω
⎤ ⎥ ⎦
= 1 ⋅ 2jω = ω 2j s2 + ω 2 s2 + ω 2
4 拉氏变换的几个重要定理
(1)线性性质: L[af1(t) + bf2 (t)] = aF1(s) + bF2 (s)
( ) 1).F(s) = 2s2 − 5s +1 s s2 +1
f(t) = 1+ cost-5sint
2).F(s)
=
s2
+
s 8s
+ 17
3).F(s)
=
s3
+
21s2
1 + 120s
+
100
4).F(s)
=
s
(s
3s2
+ 2)
+ 2s + 8 (s2 + 2s
+
4)
f(t) = 17e−4tcos(t +14o )
0
= sF(s) − f (0)
=右
进一步:L ⎡⎣f (n) ( t )⎤⎦ = snF(s) − sn-1f (0) − sn-2f ′(0) −L− sf (n-2) (0) − f (n−1) (0)
[ ] 零初始条件下有: L f (n)(t) = sn ⋅ F(s)
z 例 1:求 L[δ (t)]
t=0
=
1 s3
(4)位移定理
实位移定理: L[f (t -τ )] = e−τs ⋅ F(s)
⎧0 t < 0
z 例 5: f (t) = ⎪⎨1 0 < t < 1
⎪⎩0 t > 0
求F(s)
解: f (t) = 1(t) −1(t − 1)
( ) ∴ F(s) = 1 − 1 ⋅ e−s = 1 1 − e−s
第二章:控制系统的数学模型
§2.1 引言
·系统数学模型-描述系统输入、输出及系统内部变量之间关系的数学表达
式。
·建模方法
⎧机理分析法 ⎩⎨实验法(辩识法)
·本章所讲的模型形式
⎧时域:微分方程 ⎩⎨复域:传递函数
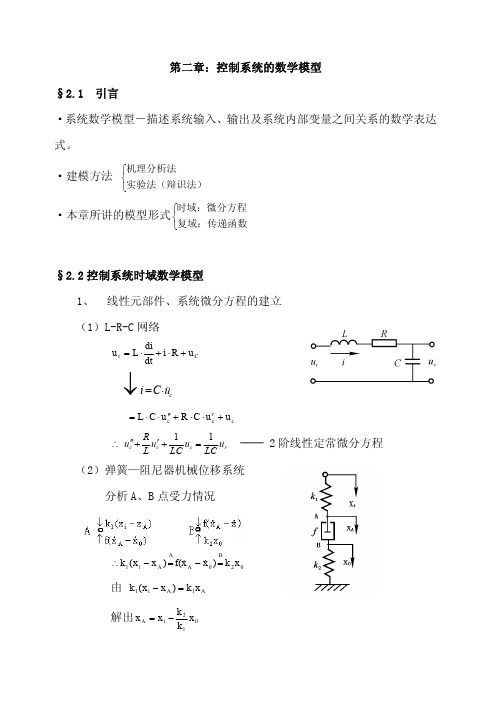
§2.2 控制系统时域数学模型
1、 线性元部件、系统微分方程的建立
(1)L-R-C 网络
ur
(2)复数模、相角
F(s) = Fx2 + Fy2 ∠F(s) = arctg Fy
Fx
(3)复数的共轭
F(s) = Fx − jFy
(4)解析:若 F(s)在 s 点的各阶导数都存在,称 F(s)在 s 点解析。
2 拉氏变换定义
F(s)
=
L[f
(t
)]
=
∫∞
0
f
(t
)
⋅
e
−st
dt
3 几种常见函数的拉氏变换
∫ (1) 反变换公式: f (t) = 1
σ
+
j∞
F(s).e
st
ds
2πj σ − j∞
(2) 查表法——分解部分分式(留数法,待定系数法,试凑法)
例1.F(s) = 1 ,求f(t) s(s + a)
解.F(s)
=
1 a
(s + s(s
a) - s + a)
=
1 a
⎡1 ⎢⎣ s
−
s
1 +
a
⎤ ⎥⎦
y(α ) = E0cosα
解:在α = α 处线性化展开,只取线性项: 0 y(α ) = y(α0 ) + E0 (− sinα0 )(α − α0 )
令 Δy = y(α )- y(α0 )
Δα = α − α 0
得 Δy = −E0sinα 0 ⋅ Δα
3、 用拉氏变换解微分方程
&l& + 2l& + 2l = 2ua (初条件为 0)
z 例 3:求 L[t]=?
解:Q t = ∫1(t)dt
[ ] ∴ L[t] = L ∫1(t)dt
=
1 s
⋅
1 s
+
1 s
t
t=0
=
1 s2
z
例
4:求
⎡ L⎢
⎣
t2 2
⎤ ⎥ ⎦
解:Q t 2
2
=
∫ tdt
[∫ ] ∴
⎡ L⎢
⎣
t2 2
⎤ ⎥ ⎦
=
L
tdt
=1⋅ 1 s s2
+ 1⋅ t2 s2
0
0
[ ] =
−1 s−a
e −(s−a ) t
∞ 0
=
− 1 (0 − 1) = s−a
1 s−a
3.
正弦函数:
f
(t)
=
⎧0 ⎩⎨sinωt
t <0 t≥0
∞
L[f (t)] = ∫ sinωt ⋅ e−stdt
0
∫ [ ] ∞
=
1
e jωt − e− jωt
⋅ e−stdt
0 2j
∫ [ ] = ∞ 1 e-(s- jω)t − e−(s+ jω)t dt 0 2j
t→∞
s→0
∞
证明:由微分定理 ∫ f ′(t)e−stdt = sF(s) − f (0)
0
∞
∫ 取极限: lim f ′(t)e−stdt = limsF(s) − f (0)
s→0
s→0
0
[ ] ∞
∞
∫ ∫ 左 = f ′(t) lime−st dt = f ′(t)⋅1⋅ dt = f (t) ∞
≠
lim
s→0
s
s2
ω + ω2
=
0
拉氏变换附加作业 一. 已知 f(t),求 F(s)=?
1 -t
1).f(t) = 1-e T
1
F(s)
=
1− s
1 s+ 1
T
=
T
s
⎛ ⎜⎝
s
+
1 T
⎞ ⎟⎠
2).f (t) = 0.03(1− cos2t)
( ) F(s)
=
0.03
⎡1 ⎢⎣ s
−
s2
s +
22
+ c2 s − p2
+ c3 s − p3
+
L
+
s→0
0
0
0
= f (∞) − f (0) = 右 = limsF(s) − f (0)
s→0
∴有: f (∞) = lim sF(s) 证毕 s→0
z
例
9:
F(s)