第1章 分析力学基础 1-6拉格朗日第二类方程的积分
第二类拉格朗日方程的初积分PPT课件

L q j
q j
L ) 0 q j
②
式②代入到式①
d
dt
k
(q j
j 1
L q j
)
dL dt
0
d
dt
[
k j 1
(q j
L q j
)
L]
0
得:
k j 1
(q j
L q j
)
L
常量
③
将L=T-V=T2+T1+T0-V代入式③
第4页/共29页
其中:
k
j 1
(q j
T2 q j
)
2T2
V mg(R r) cosj
因为 L T V L(j,j,q)
q为循环坐标,有
L
q
(J
2 3
mr2 )q
2 5
m(R
r)Rj
C1
又L中不显含时间t,且T=T2,存在能量积分,由
T2 V C2
即:
1 2
(JO
2 5
mR2
)q2
1 2
7 5
m(R
r)j
2
保守系统
2 m(R r)Rjq mg(R r) cosj 0
哈密尔顿力学是哈密尔顿于1833年 建立的经典力学的重新表述。它由拉格 朗日力学演变而来,那是经典力学的另 一表述,由拉格朗日于1788年建立。但 它可以使用辛空间不依赖于拉格朗日力 学表述。
第13页/共29页
哈密顿原理
哈密顿原理是一种积分形式的变分原理,是哈密顿于1834年建立的。
哈密顿原理为:在相同的 始终位置、相同,约束条件下, 完整、主动力有势的系统在所 有的可能运动中,真实运动使 哈密顿作用量取驻值。
分析力学基础-拉格朗日方程
其他应用领域
要点一
机器人学
在机器人学中,拉格朗日方程被用于描述机器人的运动规 律。通过建立机器人运动的拉格朗日方程,可以求解出机 器人的关节角度和速度,为机器人的运动控制提供理论依 据。
要点二
生物力学
在生物力学中,拉格朗日方程也被应用于描述生物体的运 动规律。例如,在分析动物的运动行为或人体姿势控制时 ,可以使用拉格朗日方程来描述生物体的运动状态和变化 规律。
解析解法的优缺点分析
优点
解析解法可以得到系统的精确解,适用 于简单模型和特定条件下的复杂模型。
VS
缺点
对于复杂模型,解析解法可能非常困难甚 至无法求解,需要借助数值方法或其他近 似方法。
04
拉格朗日方程的数值解法
数值解法的概念和步骤
概念
数值解法是一种通过数学计算来求解数学问 题的方法,它通过将问题离散化,将连续的 问题转化为离散的问题,然后使用计算机进 行计算求解。
步骤
1.建立数学模型:根据实际问题建立数学模 型,将实际问题转化为数学问题。2.离散化 :将连续的问题离散化,将连续的时间和空 间划分为若干个小的单元,每个单元称为一 个网格点或节点。3.求解离散化后的方程: 使用数值方法求解离散化后的方程,得到每 个网格点的数值解。4.后处理:对计算结果 进行后处理,提取所需的信息,并进行分析
分析力学基础-拉格 朗日方程
目录
• 引言 • 拉格朗日方程的推导 • 拉格朗日方程的解析解法 • 拉格朗日方程的数值解法 • 拉格朗日方程的应用领域
01
引言
拉格朗日方程的背景和重要性
背景
拉格朗日方程是分析力学中的基 本方程,它描述了系统的运动规 律。
重要性
拉格朗日方程在理论物理、工程 技术和科学研究等领域有着广泛 的应用,是理解和研究复杂系统 运动行为的关键工具。
分析力学基础
牛顿的《原理》只提供了分析质点受力与运动的原型,对于复杂的力学系 统,甚至对一个简单的刚体的运动方程也还没有弄清楚。刚体的运动方程是 1765年由欧拉(Euler)最后弄清楚的。 按照当时已有的力学知识,要分析一个稍许复杂的机构,例如一个有五级 齿轮的传动系统的运动,也还是无能为力的.如果拿这个问题去请教牛顿,牛顿 只会处理自由质点运动,不会处理刚体运动,何况还是带约束的呢.而转去请教 欧拉呢?他不得不将整个系统化归为五个”隔离体”即五个刚体,分别列出五个 刚体的运动方程,而不同刚体之间又有作用力和反作用力的耦合,所以得面对 数十个方程联立的微分方程组.这样处理问题是太复杂了. 拉格朗日自有他的高招,他将这个系统简化为一个广义坐标的系统,因 为这个虽然有五个轮子的系统只要有一个参数便可以描述它的例如随便以 其中某一个轮子的转角为参数,这个参数知道了,整个齿轮系统的状态也便 知道了.然后再计算当系统动起来后系统的动能.这时便可以列出一个广义 坐标满足的二阶方程,这是何等的简便啊! 拉格朗日是怎么作到这一点的呢?
O
x
1
自由度: 2
a A
2
广义坐标: 1 2
二、受力分析:
y
b
B
F
计算广义坐标 1 、 2 对应 的 广义力
FA
FB
以下分两种方法进行计算
O
x
1
第一种方法: 解析法
xi yi zi Qk X i q Yi q Z i q i 1 k k k
即用质点系的平衡条件是: 所有的广义力都等于零
利用广义坐标表示的平衡条件求解实际问题时,关健在 于如何表达其广义力。
通常求广义力的方法有两种:
方法一:是采用公式计算
拉格朗日第二类方程

拉格朗日第二类方程
拉格朗日第二类方程是经典力学中的基础概念之一。
它描述的是质点
在一定约束下的运动,是建立在尺度不变性原理的基础上的。
下面我
将按照以下列表分别介绍拉格朗日第二类方程的定义、推导过程以及
其应用。
1. 定义:
拉格朗日第二类方程是描述系统动力学的数学模型,它是由勒让德在1797年建立的,具体形式为:
d/dt (∂L/∂qᵢ) − ∂L/∂qᵢ = Qᵢ
其中,L是系统的拉格朗日函数,q是系统的广义坐标,Q是系统的非
保守力。
2. 推导过程:
拉格朗日第二类方程的推导主要分为以下几个步骤:
第一步,构建系统的拉格朗日函数,即L=T-V,其中T是系统的动能,V是系统的势能。
第二步,求出系统的广义动量pᵢ=∂L/∂qᵢ。
第三步,对广义动量求导得到系统的加速度aᵢ= d/dt (∂L/∂qᵢ)。
第四步,根据牛顿第二定律F=ma以及广义动量的定义pᵢ=∂L/∂qᵢ,将非保守力Q用广义动量表示为Qᵢ=∂V/∂qᵢ。
第五步,代入广义动量和非保守力的表达式,得到拉格朗日第二类方程d/dt (∂L/∂qᵢ) − ∂L/∂qᵢ = Qᵢ。
3. 应用:
拉格朗日第二类方程是经典力学中最基础的方程之一,它在物理学的各个领域都有广泛的应用,如
(1)陀螺的运动学研究
(2)杆的运动学研究
(3)学习简谐振动的方程
(4)学习经典电动力学中的运动方程
(5)学习光学中的光路方程等
总之,拉格朗日第二类方程在物理学研究中有着重要的地位,熟练掌握它的概念和应用对于探究自然界的规律和解决实际问题都具有重要作用。
拉格朗日第二类方程
( j 1,2,, k )
(6.2.5)
适用范围:完整系统。
14
j , q j ,t) (1) T T (q
(2)有势力、非有势力都适用
(3) Q j
AF q j
(4)不含约束力。 二、保守系统的拉格朗日方程 如果作用于质点系的力是有势力,则:
V Qj q j
n 1 1 2 2 ( m v ) ( m v i i i i ) k d i 1 2 i 1 2 [ ]q j j q q j j 1 dt n
d T T [ ]q j j q j j 1 dt q
k
( m)
13
将(d)(m)代入(c)得:
d T T ) q j 0 Q jq j ( j 1 j 1 dt q j q j k d T T 或: (Q j ) q j 0 j 1 j q j dt q
k k
由于δqj彼此独立,所以:
d T T Qj j q j dt q
1 2 P 9Q 0 M (R r)2 6 g 6M g 2 ( 2 P 9Q )( R r )
积分,得:
3M 2 gt C1t C 2 2 ( 2 P 9Q )( R r )
0 0 得 C1 C2 0 代入初始条件,t =0 时, 0 0 ,
由于V=V(q1,q2,...,qk),不含广义速度,所以
保守系统的拉格朗日第二类方程。
16
应用拉氏方程解题的步骤: 1. 判定质点系的自由度 f,选取适宜的广义坐标。必须注意: 不能遗漏独立的坐标,也不能有多余的(不独立)坐标。 2. 计算质点系的动能T,表示为广义速度和广义坐标的函数。 3. 计算广义力 Q j
分析力学基础第一章(4-6节)

T q
m1
m2 x m2 Lcos
px
循环积分——系统的水平动量守恒
T V C
能量积分——机械能守恒
x
F t
vA
m1 g
CvCA
m2 g
§1-6 第一类拉格朗日方程
§1-6 第一类拉格朗日方程
设描述系统的位形坐标:q1 , q2 , , qn
系统的约束方程为: fk r1, r2 , , rn , t 0 k 1,2, , s
i 1
k 1
代入动力学普遍方程:
n
Fi FIi
ri
n
Fi
miri ri
0
i 1
i 1
有:
n i 1
Fi
miri ri
N Qk
k1
n i 1
miri
ri qk
qk
§ 1-4 第二类拉格朗日方程
n
i 1
Fi
miri ri
N Qk
k1
n i 1
miri
解:1、系统的自由度为k=1
2、系统的广义坐标:
3、系统的动能: T 1 1 m l22 1 m l22
23
6
4、系统的势能:
V
mg
l
1
cos
5、拉格朗日函数: 2
L T V 1 ml22 mg l 1 cos
OB
6
2
d dt
L qk
L qk
0
1 m l2 l m gsin
3
2
mg A
i 1
Fi
miri
s
k
k 1
fk ri
ri
第1章 分析力学基础 1-6拉格朗日第二类方程的积分汇总
M1-8
我们已知道系统动能和势能为
V
1 3
Ph
Q(h
s sin
r cos )
T
1 2
P
g
Q
x&2
3 4
Q g
s&2
Q g
x&s&cos
1 2
P
g
Q
x&2
3 4
M1-10
[例] 一均质圆柱体可绕其垂直中心轴自由
转动,圆柱表面刻有倾角为 的螺旋槽。
小球M自静止沿槽下滑,已知小球质量为 m1圆柱体质量为m2,半径为R, 试求:小球下降高度为h时,小球相对圆
柱体的速度,圆柱体的角速度。 解:系统受理想、完整、定常约束,
具有两个自由度。取广义坐标为, s ;
各坐标原点均在初Leabharlann 位置。当ssin =h ,得
2m12 sin2 m2 s&2 2gh 0
(2m1 m2 )
s&
(2m1 m2 )2gh
2m1 sin2 m2
& 2m1 cos
R
2gh
(2m1 m2 )(2m1 sin2 m2)
q&k
L qk
q&k
0
N k 1
d dt
L q&k
q&k
L q&k
q&&k
L qk
q&k
d dt
N
k 1
L q&k
q&k
分析力学基础-第二类拉格朗日方程

广义坐标vA 。(Rr)
A
vA r
R r
r
M1-16
T
1 2
JO&2
1 2
Q g
v
2 A
1 2
J AA2
1 2
1 3
P g
(R
r)2&2
1 2
Q g
(R
r)2&2
1 2
1 2
Q g
r2
(R
r)2 r2
&2
1 2P 9Q (R r)2&2
12 g
W ( ) M
Q
W ( )
M
T&
1 6
2P
得
(m1 m2 )&x&1 m2l&&cos m2l&2 sin 0
M1-14
同理:
T& m2l2& m2lx&1 cos
T
m2lx&in
d dt
T x&1
m2l(l&&
cos &x&1
x&1&sin )
由拉格朗日方程d
dt
(
T q&k
)
T qk
Qk
得
m2l(l&& cos&x&1 x&1&sin) m2gl sin
)
M1-13
系统势能:(选质点 M2 在最低位置为零势能位
置)
V m2gl(1 cos)
求导运算可得:
T x&1
(m1
m2
)
x&1
06分析力学基础第二类拉格朗日方程

将Qk代入拉格朗日方程式,得
d dt
(
T qk
)
T qk
V qk
0
势能V不包含广义速度,引入拉格朗日函数
L T V L(qk , qk , t)
为拉格朗日函数(动势),是表征体系约束运动状态和相互作用 等性质的特征函数。
保守体系的拉格朗日方程为:
d dt
(
L qk
)
系统的运动微分方程。
(m1 m2 )x m2l kx 0 x l g 0
上式为系统在平衡位置(x =0, =0)附近微幅运动的微分方程。
M1-23
M1-24
变换 1.
ri qk
ri qk
由 ri ri (q1, q2, qN , t) (i 1, 2, n)
d dt
n i1
mi ri
ri qk
qk
n i1
1 2
mi
ri
ri
d dt
qk
n1 2
i1
mivi2
qk
n i1
1 2
mivi2
d dt
T qk
T qk
M1-3
由
Qk
n
miri
i1
ri qk
k 1, 2, N
可得
d dt
T qk
T qk
Qk
k 1, 2, N
为理想完整系的拉格朗日方程,方程数等于质点系的自由度数。 其中:
Qk
§1.1分析力学
第一章分析力学到现在为止,我们所研究的力学问题,基本上是用牛顿运动定律来求解的。
但用牛顿运动运动定律来求质点组的运动问题时,常常需要求解大量的微分方程组。
如果质点组受到约束,则因约束反力都是未知的,所以并不能因此而减少,甚至是增加了问题的复杂性。
十八、十九世纪,随着工业革命的迅速发展,在工程技术上迫切需要解决的又正好是这一类问题。
因此迫切需要寻求另外的方法来处理这一问题。
1788年,拉格朗日写了一本大型著作《分析力学》,在这一本著作中,完全用数学分析的方法来解决所有的力学问题,而无需借助以往常用的几何方法,全书一张图也没有。
在此基础上逐步发展成为一系列处理力学问题的新方法,称之为分析力学。
分析力学以拉格朗日和哈密顿等所建立的变分原理为基础,将力学的基本定律表示为分析数学的形式。
通过分析的方法来解决任意力学体系的运动问题,它所涉及的量是标量。
而牛顿力学涉及的量如力、速度、加速度等多为矢量。
由此看来,分析力学和牛顿力学只是同一个力学领域应用不同的数学描述而已。
对于自由质点和简单问题,两种方法无优劣(lie)之分,对复杂问题,分析力学的优越性就体现出来了。
分析力学是从能量的观点来研究力学问题,因而具有更广泛的应用价值。
它广泛的应用于结构分析、机器动力学与振动、航天力学、多刚体系统、机器人动力学以及各种工程技术领域,也可推广应用于连续介质力学和相对论力学。
许多新兴学科,如量子力学、相对论、电动力学、连续介质力学、天体力学、统计力学等等,都可以用到分析力学的理论和方法。
但是,由于分析力学中的数学推理较多,在历史上也发生过一些不良倾向,容易使人忘记力学的物理实质,对此我们应当引以为戒。
§1.1 广义坐标一、基本概念1、力学体系n 个相互作用着的质点构成的集合体。
2、 位形质点系各质点在空间的位置的有序集合,它决定了质点的位置和形状,也就是位形是质点系在空间的位置状态。
3、约束限制质点自由运动的条件。
分析力学基础第一章(4-6节)
1 2 y 2 z 2 T m x 2 Qz mg
§ 1-4 第二类拉格朗日方程
例:长为l,质量为m的匀质杆绕水平轴B转动,求其动 力学方程 解:1、系统的自由度为k=1 2、系统的广义坐标: 1 1 2 2 1 2 2 3、系统的动能: T ml ml 23 6 4、系统的广义力: l W mg sin 2 Q B O l T d T Q mg sin Qj q 2 dt q j j 1 2 l ml mg sin 3 2 mg
T V q q k k
设:L=T-V (拉格朗日函数 动势)
T V 0 q k L q 0 k
d L k dt q
§ 1-4 第二类拉格朗日方程
例:长为l,质量为m的匀质杆绕水平轴B转动,求其动 力学方程 解:1、系统的自由度为k=1 2、系统的广义坐标: 1 1 2 2 1 2 2 3、系统的动能: T ml ml 23 6 4、系统的势能: l V mg 1 cos 2 5、拉格朗日函数:
x
F t
循环积分——系统的水平动量守恒
vA
T V C
能量积分——机械能守恒
m1 g
C CA
v
m2 g
§1-6 第一类拉格朗日方程
§1-6 第一类拉格朗日方程
设描述系统的位形坐标: q1 , q2 ,, qn
系统的约束方程为: f k r1 , r2 ,, rn , t 0
§ 1-5 拉格朗日方程的初积分
二、循环积分 设:系统主动力为有势力 循环坐标:拉格朗日方程中不显含的广义坐标qk(k=1,…,N)
第一章下册哈工大理论力学
N=?
按刚片自由度计算 N=3n-s=3×5-(2×4)-2× (3-1)-2=1
按质点自由度计算 N=2n-s=2×5-2-2-4-1=1
B
30 o
O
M
C
30 o
r
O1
D
30 o
A
F
N=?
按刚片自由度计算 N=3n-s=3×5-(2×6)-2=1 按质点自由度计算 N=2n-s=2×6-8-1=3? N=2n-s=2×6-8-1-2=1
代入广义力表达式,系统平衡的时候有:
Q1 P 1 a sin P 2 2a sin F 2a cos 0 Q2 P2 b sin F 2b cos 0
由此解得:
2F tg P1 2 P2
,
2F tg P2
第二种方法: 先使 保持不变,而使 获得变分 ,得到系统的 一组虚位移,如图所示。 yC 0
由于广义坐标是相互独立的,qk 可以任意取值,因 此要使虚功方程满足,必须有:
Q1 Q2 QN 0
质点系的平衡条件是系统所有的广义力都等于零。 这就是用广义坐标表示的质点系的平衡方程。 求广义力的方法一:
xi yi zi Qk Fix q Fiy q Fiz q i 1 k k k ( k 1,2, , N )
第 一 章
分析力学基础
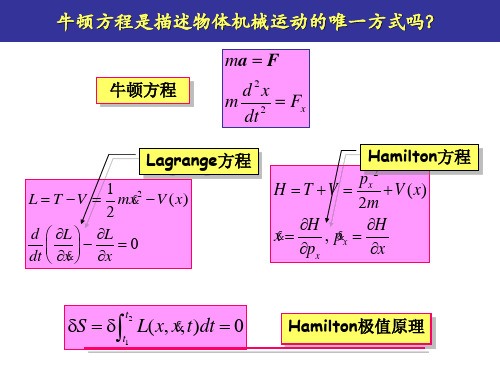
物体运动与相互作用之间的关系
牛顿第二定律 (矢量形式表示出来)
矢量力学 质点系动力学普遍定理: 动量定理、动量矩定理和动能定理
求解具有复杂约束系统和变形体的动力学 问题采用分析数学的方法 能量与功
通过虚位移原理和达朗贝尔原理建立普遍形式 下的动力学方程 分析力学
分析动力学1-第二类拉格朗日方程 - 2019

例4
本题也可以将力偶M视为 有势力,则系统势能函数 为
V mgR cos 0 Md
L=T–V
d dt
L
L
0
d dt
L
L
0
解
M
y
O
x
R
R
m
第8章 第 二 类 拉 格 朗 日 方 程 及 其 应 用
例6
Q
设倾角为的质量为M的三角块可以沿着水平
面自由运动,质量为 m的小物块沿着三角块 运动,并以刚度系数为 k的弹簧与三角块相 连,如图所示。求该系统的运动微分方程。
用
xr :
3 2
mxr
mx cos
mg
sin
0
第8章 第 二 类 拉 格 朗 日 方 程 及 其 应 用
例4
半径为R的圆环在力偶 矩为M的力偶作用下转 动,质量为m的小环可 在圆环上自由滑动。 已知圆环对y轴的转动 惯量为J,忽略摩擦力。 求为使圆环匀角速转 动所需施加的力偶矩M。
M
y
O
x
R
m
第8章 第 二 类 拉 格 朗 日 方 程 及 其 应 用
)(r1
r2
)2
2
A=M Q M
T
1 6
(2m
9m2
)(
r1
r2
)
2
T
0
d dt
T
T
Q
1 6
(2m
9m2 )(r1
r2 )2
M
(2m
6M 9m2 )(r1
r2 )2
第8章 第 二 类 拉 格 朗 日 方 程 及 其 应 用
例3
M
用拉格朗日方程列写系统的运动微分方程(假 定小球纯滚动)。
第一章 分析力学基础
y = f (x) (x, y R)
在闭区间a, b上的连续函数A(x),积分
b
I = a A(x)dx
设定义在 a, b上的所有连续函数组成的集合为 ,则
上式给出了集合 到数域R的一个映射关系,称之为泛函 数,记为
I (A) (I R,A )
n个质点组成的质点系,任一瞬时这n个质点在空间中 位置的集合称为该质点系的位形。
所有满足约束条件的质点系的位形的集合称为该质点 系位形空间 。可以证明,对于完整约束系统,位形空间为 线性空间。
对于保守系统,位形空间的每一个元素(即质点系的 每一个位形),都有唯一的势能值与之对应,因此,质点 系的势能可以看成是定义在位形空间的一个泛函数。
n
δWF δWFi i 1
n
i 1
( Fix
N k 1
xi qk
δqk
Fiy
N k 1
yi qk
δqk
Fiz
N k 1
zi qk
δqk )
N n (Fix
k 1 i1
xi qk
Fiy
yi qk
Fiz
zi qk
)δqk 0 Nhomakorabea令Qk
n
( Fix
i 1
xi qk
Fiy
yi qk
势能变分的定义
设y=f(x)是定义在数域R上的可微函数,当自变量x发生 微小变化dx时,对应函数值的微小变化称为函数的微分,记 作
dy = f (x + dx) - f (x) = f (x)dx
设 I (A) 是定义在集合 上的泛函数,当自变量A发 生微小变化 A 时,对应泛函数值的微小变化称为泛函数的 变分
分析力学第一章
(α = 1, 2,3)
∂L m& 计算 & = xi ∂xi
∂L ∂U =− ∂xi ∂xi
∂U & x 即有 m&i = − ∂xi
(i =1,2,3)
笛卡尔坐标系中的拉格朗日方程就是牛顿第二定律。
2.已知柱坐标 ( ρ , ϕ , z ) 与笛卡尔坐标的关系是
x = ρ cos ϕ , y =ρ cos ϕ , z = z
dr长度同为l的轻棒四根相互连接成一个可以无摩擦的改变顶角的菱形abcdab和ad两棒无摩擦的支于处于同一水平线上且相距2a的两根钉上bd之间用一根轻质棒连接在连接点b和d处各棒之间可以无摩擦的转动c点上系有一重物wc点和重物受到约束只能上下运动设a点两棒之间的夹角为试用虚功原理求平衡时联结棒bd中的张力t讨论它的方向与的大小的关系
B
l
T
2α 2a
A
l
D
T
l C
l
由虚功原理,平衡时受到的主动力之虚功和为0:
v v v v v v TB ⋅δrB +TD ⋅δrD +W •δr = 0 C
v v 选 TB和 D 方向如图,大小为T ,则 T v v v v TB ⋅δrB = −Tl cosα δα TD ⋅δrD = −Tl cosα δα v v a W •δr =W(−2l sin α + 2 )δα C sin α
W a ∴2Tl cosα +W2l sin α − 2 = 0 sin α
W
W a W a ∴T = −W tgα = 2 ( −sin3பைடு நூலகம்α) 2l sin2 α cosα sin α cosα 2l
T =0
分析力学初步-拉格朗日方程

P
的虚位移,这一虚位移是两者共有的
(ii)在切平面不动时,两个刚体在各自切平面内的虚位移: r1
r r r 1 1 r r r 2 2
, r2
r1 r2 r1 r2
约束:限制力学体系中各点运动的条件,其方程成为约束方程用 约束的分类: (1) 稳定约束和非稳定约束: a. 稳定约束:约束方程中不显含时间即
f ( x1 , x2 , x3n , t ) 0 表示
f ( x1 , x2 , x3n ) 0
b. 非稳定约束:约束方程中显含时间即
f ( x1 , x2 , x3n , t ) 0
二. 非自由质点系的约束和广义坐标 1.虚位移:
矢量:
r r (t )
在
dt
时间内的位移为
dr
想象在某一时刻 t 质点发生了一个约束许可的无限小的位移
这个位移不是由于质点的实际运动所产生的,它不需要时间,这种位移称为虚位移用 r 表示
例:设 n 个质点组成的系统,受到一个约束(完整约束)约束方程为:
(∵ r r
ห้องสมุดไป่ตู้
)
(3) 两个光滑表面接触的刚体
若刚体有滑动则: r1 r2 可以证明 r1 r2 在刚体接触点的公切面内,而
F N 1 和 F N 2 垂直于公切面 W F N 1 r1 F N 2 r2 F N 1 ( r1 r2 ) 0
l 摆长 l 随时间变化:初始时刻为 0 ,以速度 v 拉动绳子的另一
端。 约束方程:
1.1分析力学基本概念
牛顿力学:1687年,《自然哲学的数学原理》。困难:多质点多约
束系统的受力分析。 分析力学:拉格朗日于1788年奠定,研究对象是质点系。 运用数学分析(变分法)的方法。(标量力学,整体到个体) 利用纯数学分析方法,将动力学方程用统一的原理与公式进行 表达。 以拉格朗日方程为基础,称为拉格朗日力学。 1834年哈密顿将拉格朗日方程变换成正则形式,将动力学基本原 理归纳为变分形式的哈密顿原理,从而建立了哈密顿力学。
O
x
m1 x φ
l
○ m2
y 换方程: 变
ri ri (q1 , q2 , , qk )
( i 1,2, , n)
x1 x y1 0 x 2 x l sin y2 l cos 广义坐标为: x和
例如,图示双摆,有两个自由度,可 取 1 , 2 为广义坐标来确定系统的位置。
2 q sin q 0
o
经典力学
【经典力学】是牛顿运动定律或与之有关且等价的其他力学原理,是宏观 物体低速运动时的近似定律。 两个基本假定: 时间和空间是绝对的,与观测者的运动无关;相互作用的传递是瞬时 到达的;只适用于与光速相比低速运动的情况。 物理量在可以无限精确地测定。在微观系统中,所有物理量在原则上 不可能同时被精确测定。 两大支柱:牛顿三定律和万有引力定律。 两个分支:矢量力学和标量力学。 理论力学与分析力学的区别 分析力学采用变分法,着眼于能量。理论力学采用几何法, 着眼于力。
4. 拉格朗日方程
r
q t x
o
d L L 2 sin q 0 0 q dt q q
为什么学习分析力学?
第1章 分析力学基础 1-4 第一类拉格朗日方程
步骤: 1. 列出笛卡尔坐标下的约束方程;
f k 2. 根据约束方程确定 ; ri
3. 分析各质点上的主动力; 4. 根据第一类拉格朗日方程,列出运动微分方程;
5. 与约束方程联立求解,确定积分常数。
M1-6
已知: M1 的质量为 m1 , M2 的质量为 m2 , 杆长为l。 试建立此系统的运动微分方程。 1. 约束方程
有N=3n-s个是独立的。
拉格郎日开创的分析力学,就是为克服动力学普遍方程
的弱点,解决多自由度、非自由系统的动力学问题而发展完
善的。
M1-1
解决动力学普遍方程困难主要有三条途径:
1、分离独立坐标法; 2:拉格郎日乘子法解算动力学普遍方程。
这种方法在实际应用中,并不可取,但是起步艰难的第一 步,同时是解微分方程的一种重要方法;
3.各质点上的主动力
F1 m1gj F2 m2 gj
M1-7
4. 根据第一类拉格朗日方程,
f k Fi mi ri k 0 ri k 1
s
列出运动微分方程
f1 f 2 F1 m1r1 1 2 0 r1 r1
f f F2 m2 r2 1 1 2 2 0 r2 r2
3:拉格郎日第二类方程:采用广义坐标代替笛卡尔坐标,彻
底改造动力学普遍方程,得到一组二阶常微分方程。
M1-2
1—4 第一类拉格朗日方程
我们引入符号
f k f k f k f k i+ j+ k r xi yi zi
对约束方程两边变分 f k (r1 , r2 , ... rn t ) 0 (k 1, 2,3, , s)
独立坐标有3n-s个,对于不独立坐标,我们可选取适当的 k 使
高校力学经典课件-理论力学II-第8次课new

( 1, 2,
,d g)
3n
dg
(Fi mi xi Ai ) xi 0
i 1
1
选择 d g 个不定乘子 使得动力学方程中的 d g 不独立的坐标变分前的系数为零,
而剩下的坐标变分为独立的,其前面的系数也只能为零,于是可得 3n 个方程。
式中, 一般称为拉格朗日乘子。
7
7
6 第一类拉格朗日方程
为l。 试求:此系统的运动微分方程。
11
11
解: 取系统为研究对象 设质点M的1 坐标为 x1,y1
质点 M的2 坐标为 x2,y2
则系统的约束方程为
f1 y1 0,f2 (x1 x2 )2 ( y1 y2 )2 l 2 0
由
fk
f k
i
f k
j
f k
k
ri xi yi zi
拉格朗日乘子 1, 1, , d g 。
8
8
6 第一类拉格朗日方程
讨论:拉格朗日第一类方程
未知数个数: 3n个位置坐标+(d+g)个拉格朗日乘子=3n+d+g个 方程个数:3n个 还需要补充d+g个 考虑了完整和非完整约束,第一类拉格朗日方程可以处理 完整、非完整问题,更具有普遍性; 代价:增加方程数目,微分代数混合方程。
Fi
mi ri
s
k
k 1
fk ri
0
(i 1,2,,n)
13
13
m1x1 22 (x1 x2 ) 0 m1y1 1 22 ( y1 y2 ) m1g 0 m2 x2 22 (x1 x2 ) 0 m2 y2 22 ( y1 y2 ) m2 g 0
然后借助于求出的不 定乘子可以决定系统 内部的约束力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
N
ri ri 1 1 1 T mi vi vi mi qk ql mkl qk ql 2 k , l 1 2 i 1 2 i 1 k 1 qk q l l 1
n
n
N
M1-7
[例 ]
楔形体重P,斜面倾角,置于光滑水平面上。均质圆柱体重
Q,半径为 r ,在楔形体的斜面上只滚不滑。初始系统静止,且圆 柱体位于斜面最高点。
试求:(1)系统的运动微分方程;(2)楔形体的加速度;(3)系统的能
量积分与循环积分。
解:研究楔形体与圆柱体组成 的系统。系统受理想、完整、 定常约束,具有两个自由度。 取广义坐标为x, s ;各坐标原点
T V C2
当t =0时, s 0 代入上式中,得
C1 C2 0 (2m1 m2 ) R2 2m1sR cos 0
1 [2m s 2 (2m m ) R2 2 4m sR cos ] m gs sin 0 1 1 2 1 1 4
化简,得
2m1 s cos (2m1 m2 ) R
2 2m1 sin 2 m2 2 s 2 gs sin 0 (2m1 m2 )
M1-14
2m1 s cos (2m1 m2 ) R
2 2 2m1 sin
m2 2 s 2 gs sin 0 (2m1 m2 )
N
N
其中
ri ri mkl mi q q k l i 1
M1-2
n
是广义坐标的函数,称为广义质量
很容易证明
T q 2T k q k k 1
N
注意势能 V 不含 qi 项,可得
L q (T V ) q 2T k k q q k k k 1 k 1
n
ri ri 1 mi qk ql 1 2 k,l 1 i 1 ql qk 2
n
N
n
k , l 1
mkl qk ql
N
ri ri mkl mi qk ql i 1
M1-19
均在初始位置。
M1-8
我们已知道系统动能和势能为
1 V Ph Q (h s sin r cos ) 3
P Q 2 3 Q 2 Q 1 T x s xs cos 2 g 4g g
1 P Q x 2 3 Q s 2 Q xs cos 1 Ph Q(h s sin r cos ) C 1 2 g 4g g 3
解:系统受理想、完整、定常约束,
具有两个自由度。取广义坐标为, s ;
各坐标原点均在初始位置。
M1-11
小球的动能
T1 1 m1v12 2 1 m1[vr 2 ve 2 2vr ve cos(180 )] 2 1 m1 (s 2 R2 2 2sR cos ) 2 圆柱体的动能 T2 1 J 2 1 m2 R 2 2 2 4 系统的动能
N N
d d T d L 2 (2T L) 0 dt dt dt 积分上式,可得。
2T L C T V C
M1-4
积分上式,可得。
T V C
上式是保守系统的机械能守恒定律,也称为保守系统的广义能
量守恒。也称为保守系统的拉格朗日方程的能量积分。
M1-5
二、循环积分 如果拉格朗日函数L中不显含某一广义坐标 qk , 则该坐标 称为保守系统的循环坐标或可遗坐标。 当 qk (k N ) 为系统的循环坐标时,必有
d L L L qk qk qk dt qk qk qk k 1 d L L L qk qk qk qk dt k 1 qk k 1 qk
N
2T
M1-17
T 1 mkl qk ql 1 (m11q1q1 m12q1q2 m21q2q1 m22q2q2 ) 2 k , l 1 2
2
T 1 (2m q 2m q ) m q m q m q 11 1 12 2 11 1 12 2 1l l q1 2 l 1
当t =0时, x s 0 ,x = s = 0 , 代入上式中,得
1 C1 Ph Q ( h rcos ) 3 1 P Q x 2 3 Q s 2 Q xs cos Q s sin 0 2 g 4g g
M1-9
由于拉格朗日函数L中不显含广义坐标x,故 x 为系统循环 坐标,故有循环积分:
由于拉格朗日函数L中不显含时间t,广义坐标,故为 系统循环坐标,故有循环积分和能量积分。
L C 1
T V C2
M1-13
L C 1
1 [(2m m ) R2 2m sR cos ] C 1 2 1 1 2
1 [2m s 2 (2m m ) R2 2 4m sR cos ] m gs sin C 1 1 2 1 1 2 4
L T P Q Q Px x scos C2 x x g g
s 0 ,故上式中C2 = 0 ,可得 t = 0时 x
( P Q ) x Qs cos 0
1 P Q x 2 3 Q s 2 Q xs cos Q s sin 0 2 g 4g g
当ssin =h ,得
2 2m1 sin 2 m2 2 s 2 gh 0 (2m1 m2 )
(2m1 m2 )2 gh s 2m1 sin 2 m2 2m1 cos 2 gh R (2m1 m2 )(2m1 sin 2 m2 )
M1-15
M1-16
上两式即为系统的能量积分和循环积分。 第二式实际上是
系统的机械能守恒方程。 第一式实质上是系统的动量在x方向 守恒。
M1-10
[例] 一均质圆柱体可绕其垂直中心轴自由
转动,圆柱表面刻有倾角为 的螺旋槽。 小球 M 自静止沿槽下滑,已知小球质量为
m1圆柱体质量为m2,半径为R,
试求:小球下降高度为 h 时,小球相对圆 柱体的速度,圆柱体的角速度。
T 1 (2m q 2m q ) m q m q m q 21 1 22 2 21 1 22 2 2l l q2 2 l 1
2
2
T m q kl l qk l 1
N
M1-18
n N N 1 r r 1 i i T mi vi vi mi qk ql 2 i 1 2 i 1 k 1 qk ql l 1 n N N N ri ri ri ri 1 1 qk ql mi qk ql mi 2 i 1 k 1 l 1 ql qk 2 i 1 k,l 1 ql qk n
N N
d L L 0 将方程 两边乘 qk 对k求和 dt qk qk
d L dt qk k 1
N
q L q 0 k q k k
M1-3
d L dt qq 0 k q k k
pk称为广义动量,因此循环积分也可称为系统的广义动量 积分。 保守系统对应于循环坐标的广义动量守恒。
能量积分和循环积分都是由保守系统拉格朗日方程积分一
次得到的,它们都是比拉格朗日方程低一阶的微分方程。 一个系统的能量积分只可能有一个;而循环积分可能不止 一个,有几个循环坐标,便有几个相应的循环积分。
于是拉氏方程成为
L 0 qk
d ( L ) L 0 dt qk qk
积分得:
L C qk
(k N )
称为拉格朗日方程的循环积分
M1-6
因L = T - V,而V中不显含 qk ,故上式可写成
L (T V ) T p C k qk qk qk
1-6
拉格朗日第二类方程的积分
拉格朗日第二类方程的求解需要对拉格朗日第二类方程进行 积分。
对于保守系统,可以得到拉格朗日方程的某些统一形式的
首次积分,从而使得保守系统动力学问题的求解过程进一步简 化。
保守系统拉格朗日方程的首次积分包括:能量积分、循环
积分。
M1-1
一、能量积分 设系统所受的约束为定常约束,则 ri ri ( q1 , q2 , ... qN ) 中不 显含t ,则
T T1 T2
M1-12
系统的势能(取小球的起点为势能零点):
V m1 gs sin
系统的拉格朗日函数为
2 2 2 2 2 1 1 L m1 (s R 2sR cos ) m2 R m1gs sin 2 4 2 2 2 1 L [2m1s (2m1 m2 ) R 4m1sR cos ] m1gs sin 4
1 T mkl qk ql 2 k , l 1 T m q kl l qk l 1
N T q mkl ql qk qk k k 1 k 1 l 1 N N
N
N
T q qk k k 1
N
k ,l 1
mkl qk ql