步行周期中的运动学分析1尚江
步行周期分期方法ppt课件
4、足偏角
5、步频
步数/Min
6、步行速度 行走距离/Min
四、行走运动学
(一)行走中的下肢运动
1、髋关节 迈步相中期 度
髋关节屈曲角度最大30
2、膝关节 两次屈曲和两次伸展;迈步相末期,站 立中期,伸展;站立相早期15度,迈步相早期6 0度,屈曲
中身体其它部位的运动 1、躯干 前后旋转运动和上下垂直运动,左右侧
注意几点:在表中由黑格子,浅灰 格子和空白格子 3、结果分析 各个关节活动在步行周期中常
见的异常表现,可能原因以及提示进一步 的检查,供同学们自学,查表备用。
九、行走能力的评定
1、功能独立性测量-FIM评分,七分制 每一项最高分七分,最低分一分,得分依据: – 患者的独立程度 – 对于辅助具或辅助设备的需求 – 他人给予帮助的量 2、行走能力的评定依据:行走的距离,辅助量 3、评分标准
十、常见病理步态的原因及表现
(二)肌无力 • 臀大肌无力-挺胸凸腹的臀大肌步态,足跟着
地,伸髋,肩关节后撤,胸凸腹 • 臀中肌无力-Frendelenburg步态,下肢离地
侧骨盆下降,躯干向支撑腿侧侧弯 • 髋关节屈肌无力-跛行步态 • 股四头肌痲痹-对足跟着地的影响,膝反张 • 胫前肌无力-足前部拍击地面,足下垂,足尖
十、常见病理步态的原因及表现
(一)疼痛 共同特征:1】跨步长缩短
2】步行速度下降 3】站立时间相对缩短 1、髋关节疼痛的步态 1】站立相,患侧站立时间缩短 2】迈步相,患侧屈髋外展,外旋 3】尽量避免足跟着地 2、膝关节疼痛的步态:轻度屈膝,足尖着地 3、踝关节疼痛的步态:跨步长明显缩短,正常 足跟-足尖运动的模式消失
七、步态分析步骤
– 了解病史
了解病情主诉
步态分析之步行周期
步态分析之步行周期步态分析是一种评估人类行走的方法,它用于测量和记录步行周期中的各个关键事件和参数。
步态分析对于研究和评估异常步态或者康复工作是非常有用的。
其中,步行周期是步态分析中最基本和重要的参数之一,它描述了一个完整行走运动的时间。
步行周期通常被定义为从一个脚的接触地面开始,到下一次该脚再次接触地面为止的时间间隔。
一个完整的步行周期由两个步态相组成,分别是左脚周期和右脚周期,二者组成了一个完整的双足行走周期。
在步行周期中,包含了多个重要事件,如接触地面、摆动相、支撑相等。
接触地面是指脚触碰地面并开始支撑身体重量的时刻。
摆动相是指脚从接触地面到再次接触地面之间的时间段,也就是脚在空中的时间。
支撑相是指脚接触地面并支撑身体重量的时间段,也就是脚在地面上的时间。
步行周期与步行速度有一定的关联。
通常情况下,步行周期会随着步行速度的增加而减少。
这是因为在较快的速度下,人们倾向于加快步行的频率,从而减少了每步的时间。
而在较慢的速度下,步行周期会相对较长,因为人们会较慢地行走,每步花费更多的时间。
步行周期的测量和分析对于评估和判断步态异常非常重要。
例如,步态周期的异常可能是步伐不稳、踩踏不准或行走速度不稳定等问题的表现。
通过测量和分析步行周期,可以更好地了解和评估这些问题的严重程度,并为康复或矫正提供依据。
在步态分析领域,有多种方法可以测量和分析步行周期。
其中最常用的方法是使用传感器技术,如压力传感器、加速度计和陀螺仪等。
这些传感器可以被放置在鞋子、腿部或其他身体部位上,通过检测动作和运动来记录和分析步行周期。
现在,也有一些智能手表或手机应用程序可以通过内置传感器来测量和分析步行周期。
总结起来,步行周期是步态分析中最基本和重要的参数之一、它描述了一个完整行走运动的时间,并包含了多个重要事件和参数。
通过测量和分析步行周期,可以更好地评估和判断步态异常,并为康复或矫正提供依据。
步行周期的测量和分析通常使用传感器技术,如压力传感器、加速度计和陀螺仪等。
走的生物力学原理
走的生物力学原理
人体行走的生物力学原理是行走过程中藉助肌肉活动所耗费的能量最小化的原理。
在
正常步态的走路过程中,大腿的关节活动将产生上下前进的运动,并借此带动其他关节的
活动。
具体来说,人体行走的运动机制是把躯干的重量分成腿的动能和静力,通过空间的运
动来开始、改变和变化肌肉活动。
一般地,一次行走会发生REFERENCE次关节活动,但大
多数人行走只需4步:(1)滑行阶段:脚掌着地,通过膝关节和踝关节控制膝腿上半身;(2)后跟触地阶段:膝静止,脚踝关节伸张,踝volzfolle距离地面最快;(3)吸引阶段,上半身迅速向前,脚踝关节加力撑起;(4)前跟触地阶段:膝静止,脚踝关节屈曲,提供新的推力。
这4步形成的原理,也被称为动态平衡模型,被广泛应用于行走机器人、
静态平衡的研究和人类的生物力学学习中。
研究表明,肌肉力大致可以分为直行和转动两种,正常步态中,会出现一种相互促进
的力学模式,即由三个相互作用的立体铰件——膝腿、足跟和膝足三节棒组成的关节——产生连续的循环力学活动。
在此情况下,肌肉活动中的能量消耗最小,从而实现最低
的能量损耗。
此外,在行走的自然步态中,脚尖收缩周期较短,可以让整个身体产生更好的节奏感,同时腹肌也能产生更好的协助作用,以稳定身体。
因此,步态最符合生物力学原理的步态
是“脚尖收缩,腹部一起收紧”。
总之,人体行走的生物力学原理是尽可能地最小化肌肉活动消耗的能量,实现最大化
的行走效率,充分发挥身体各部位的协调作用,以达到最佳的自身运动效果。
【康复评定】步态分析康复评定,一文读懂

【康复评定】步态分析康复评定,一文读懂步行周期指行走过程中足地至该侧足跟再次着地时所经过的时间。
每一侧下散有其各自的步行周期。
每一个步行周期分为站立相和迈步相两个阶段。
站立相又称支撑相为足底与地面接抽的期边远步相亦称摆动根指支离开地面向动的阶。
站步行周期的60%短步相约占其中的40%一条腿与地面接触并负重时称“单支撑期体重从一侧下肢向另一侧下肢传递,双足同时与地面接触时称为“双支撑期”。
(1)首次着地:步行周期和站立相的起始点指足跟或足底的其他部位第一次与地面接触的瞬间。
正常人行走时的首次着地方式为足跟着地。
不同的病理步态中,首次着地方式表现各异,如前脚掌(即跖骨头)着地、足底外侧缘着地、足跟与前脚掌同时着地。
(2)负荷反应期:指足跟着地后至足底与地面全面接触瞬间的一段时间,即一侧足跟着地后至对侧下肢足趾离地时(0~15%步行周期),为双支撑期,是重心由足跟转移至足底的过程,又称承重期,指正常行走时足跟着地至膝关节屈曲角度达到站立相期间的最大值(约发生在10%~15%步行周期)。
(3)站立中期:指从对侧下肢离地至躯干位于该侧(支撑)腿正上方时(15%~40%步行周期),为单腿支撑期,此时重心位于支撑面正上方。
(4)站立末期:为单腿支撑期,指从支撑腿足跟离地时到对侧下肢足跟着地(40%~50%步行周期)。
(5)迈步前期:指从对侧下肢足跟着地到支撑腿足趾离地之前的一段时间(50%~60%步行周期),为第二个双支撑期。
(6)迈步初期:从支撑腿离地至该腿膝关节达到最大屈曲时(60%~70%步行周期)。
此阶段主要目的是使足底离开地面(称为足廓清),以确保下肢向前摆动时,足趾不为地面所绊。
(7)迈步中期:从膝关节最大屈曲摆动到小腿与地面垂直时(70%~85%步行周期)。
保持足与地面间的距离仍是该期的主要目的。
(8)迈步末期:指与地面垂直的小腿向前摆动至该侧足跟再次着地之前(85%~100%步行周期)。
该期小腿向前摆动的速度减慢并调整足的位置,为进入下一个步行周期做准备。
步行周期分析
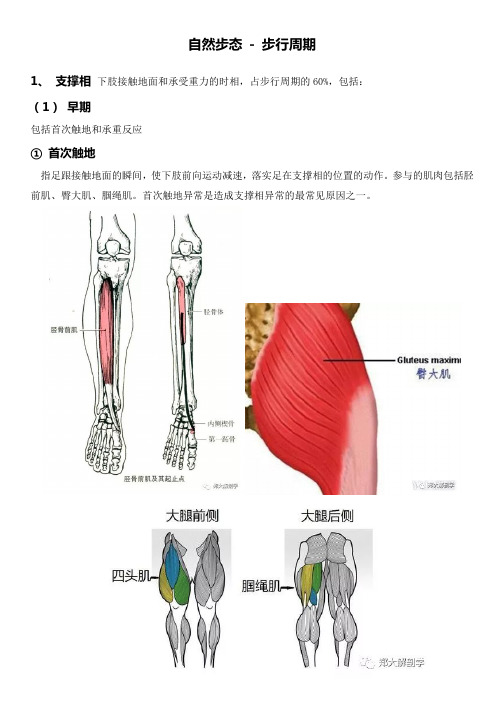
自然步态 - 步行周期1、 支撑相 下肢接触地面和承受重力的时相,占步行周期的60%,包括:(1) 早期包括首次触地和承重反应① 首次触地指足跟接触地面的瞬间,使下肢前向运动减速,落实足在支撑相的位置的动作。
参与的肌肉包括胫前肌、臀大肌、腘绳肌。
首次触地异常是造成支撑相异常的最常见原因之一。
② 承重反应指首次触地之后重心由足跟向全足转移的过程。
参与的肌肉包括股四头肌、臀中肌、腓肠肌。
(2)中期支撑足全部着地,对侧足处于摆动相,是唯一单足支撑全部重力的时相,正常步速时大约为步行周期的38%~40%。
参与的肌肉主要为腓肠肌和比目鱼肌。
下肢承重力小于体重或身体不稳定时此期缩短,以将重心迅速转移到另一足,保持身体平衡。
(3)末期指下肢主动加速蹬离(push off)的阶段,开始于足跟抬起,结束于足离地约为步行周期的10%~12%。
此阶段身体重心向对侧下肢转移,又称为摆动前期。
参与的肌肉为腓肠肌和比目鱼肌(等长收缩)、股四头肌和髂腰肌(向心性收缩)。
2、摆动相下肢在空中向前摆动的时相,占步行周期的40%,包括:(1)摆动初期:主要的动作为足廓清地面和屈髋带动屈膝,加速肢体前向摆动。
参与的肌肉为胫前肌、髂腰肌、股四头肌。
如果廓清地面障碍(如足下垂),或加速障碍(髂腰肌和股四头肌肌力不足),将影响下肢前向摆动,导致步态异常。
(2)摆动中期:从膝关节最大屈曲到小腿与地面垂直。
足廓清仍然是主要任务。
参与的肌肉主要为胫前肌,保持踝关节背屈。
(3)摆动末期:主要任务是下肢前向运动减速,准备足着地的姿势。
参与的肌肉包括腘绳肌、臀大肌、胫前肌、股四头肌。
正常人站立姿势的特点是:支撑面窄,质量中心位置高,以稳定左右对称的稳定支撑面为基础的下肢、躯干和头部进行抗重力伸展活动,保持着直线站立的姿势控制。
中风患者,下肢、躯干、和头部进行抗重力伸展活动弱化,骨盆前倾髋关节伸展不充分,瘫痪侧骨盆后撤,膝关节过伸,多伴有足下垂内翻,难以形成左右对称的支撑面。
步态周期的八个分期

步态周期的八个分期
步态周期是一种步行模式,它由八个分期组成。
第一个阶段是腓肠肌反射阶段。
当运动者的脚踩到地板的时候,腓肠肌就会发生反应,从而帮助运动者保持平衡和稳定。
第二个阶段是受力阶段。
在这个阶段,当受脚底部压力时,下肢肌肉会发生反应,制造向前推动所需的力量。
第三个阶段是射程定位阶段。
在这个阶段,运动者会意识到腿部的开端和结束点,控制腿的张弛,有助于到达预定终点。
第四个阶段是步幅定位阶段。
在这个阶段中,运动者会正确地调整步态步幅和控制,以保持正确的步态幅度。
第五个阶段是腿部运动阶段。
在这个阶段,运动者会通过肌肉活动来控制双腿移动,从而实现步态推进。
第六个阶段是能量积聚期。
在这个阶段,腿部肌肉会将能量积聚起来,以帮助运动者维持步态的稳定性。
第七个阶段是双腿运动阶段。
在这个阶段,两条腿交叉运动,一前一后,配合着彼此,以实现自然步态的流畅运动。
最后一个阶段是共同推动阶段。
在这个阶段,两腿的运动围绕腰部的动作完成,以最大效率地推动步态运动,有助于改善施加动力方面的精度。
每一个阶段都有其独特的功能,这些阶段之间有利于实现有效和高效的运动。
步态周期是非常重要的,能够帮助运动者学习正确的步态,更好地控制运动姿势和步态,从而提高跑步效果。
步行周期中下肢各关节生物力学护理课件

总结词
合理安排运动,避免过 度使用膝关节
总结词
保持正确的姿势,减轻 膝关节压力
总结词
定期进行膝关节检查, 及时发现并处理问题
踝关节疾病的预防与护理
总结词
了解踝关节的生物力学特点, 预防踝关节疾病的发生
总结词
合理安排运动,避免过度使用 踝关节
总结词
保持正确的姿势,减轻踝关节 压力
总结词
定期进行踝关节检查,及时发 现并处理问题
踝关节
在支撑相中承受身体重量, 调节身体平衡;在摆动相 中推动身体向前移动。
膝关节
在支撑相中稳定身体姿势, 吸收地面反作用力;在摆 动相中协助身体向前移动。
髋关节
在支撑相中协助身体重心 转移;在摆动相中推动身 体向前移动。
02
下肢各关节的生物
力学特性
髋关节的生物力学特性
总结词
稳定、灵活
详细描述
髋关节在步行周期中发挥着稳定和灵活的作用。它允许大腿在矢状面内进行前 屈和后伸运动,同时还可以在水平面内进行内收和外展运动。这些运动有助于 维持身体的平衡和步行的顺畅。
足部柔韧性训练
通过牵拉和按摩等手段增加足部肌肉和软组织的柔韧性。
足部肌力训练
通过抗阻训练或使用器械增强足部肌肉的力量。
步态和姿势矫正
针对异常步态和姿势进行矫正,改善足部受力分布和行走效率。
THANKS
感谢您的观看
踝关节活动度训练
进行踝关节的背伸、跖屈、内翻、外翻等运 动,以增加关节活动范围。
肌力训练
通过抗阻训练或使用器械增强踝关节周围肌 肉的力量。
平衡和协调训练
进行单脚站立、闭眼单脚站立等平衡和协调 训练,提高踝关节的控制能力。
步行周期中的运动学分析-尚江

脑瘫患儿步态矫正方法探讨
针对脑瘫患儿的不同步态特征,制定个性化的步态矫正 方案。
采用生物反馈、电刺激等辅助手段,促进患儿神经系统 的发育和重建。
通过康复训练,提高患儿的下肢肌肉力量和关节活动度, 改善步行能力。
鼓励家长参与康复训练,提高患儿的康复效果和生活质 量。
老年人跌倒风险评估及预防措施
通过问卷调查、平衡能力测试 等方法,对老年人进行跌倒风
05 典型异常步态案例分析
偏瘫患者步态特征描述
01
偏瘫患者常表现为患侧下 肢支撑能力减弱,步长缩 短,步行速度减慢。
02
患侧膝关节在支撑期常 出现过度伸展或屈曲, 导致步行稳定性下降。
03
患侧踝关节背屈受限, 影响步行过程中的推进 力。
04
偏瘫患者常出现患侧上肢 摆动减少或消失,影响身 体平衡和步行效率。
多模态数据融合
系统能够融合多种传感器的数据,进行多模态分 析,提高诊断的准确性和可靠性。
可视化界面友好
系统界面友好,操作简单,方便医生和患者使用。
虚拟现实技术在康复训练中应用前景
沉浸式体验
虚拟现实技术能够提供沉浸式的训练环境,让患者更加投入和专注。
个性化训练方案
根据患者的具体情况,制定个性化的训练方案,提高训练效果。
头部的稳定性对于视觉感知至关重要。保持头部稳定可以帮助我们更清晰地看到周围环境,从而更好地感知 运动状态和身体平衡情况。
颈部肌肉对头部稳定性的控制作用
颈部肌肉在维持头部稳定性方面发挥着重要作用。通过收缩和放松颈部肌肉,可以实现对头部的精细控制, 保持其在运动过程中的稳定性。
前庭系统对头部稳定性的调节作用
确的数据支持。
实时性强
传感器可以实时采集数据,及时反 馈步行状态,为运动学分析提供实 时信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以防止身体向前倾斜。
第34页/共39页
站立相 摆动相
▪ 胫前肌:足跟着地时,胫前肌离心性收缩以控制
踝关节跖屈度,防止在足放平时出现足前部拍击 地面的情况。足趾离地时,胫前肌收缩,再次控 制或减少此时踝关节的跖屈度,保证足趾在摆动 相能够离开地面,使足离地动作顺利完成。
二、步行周期的运动学特征
1、步行周期
第4页/共39页
站立相 (stance phase)
▪ 步行周期中从足跟着地到足趾离地
的过程。约占60%GC。其中包含 两个双支撑期和一个单支撑期。
第5页/共39页
双支撑
(double support)
行走中双脚与地面同时接触的时 期。以秒为计时单位,或步行周期 百分比表示(各占10%GC,共
再次着地的过程。约占40%GC。一 侧下肢迈步相时间等于对侧下肢单 支撑期时间。
第8页/共39页
站立相分期
▪ 首次着地 ▪ 足放平(负荷反应期,预负荷) ▪ 站立中期 ▪ 足跟离地(站立相末期) ▪ 足趾离地(迈步相前期)
第9页/共39页
首次着地(0%)
▪ 步行周期和站立
相的起始点,指 足跟或足底的其 它部位第一次接 触地面的瞬间。
第23页/共39页
足趾离地(迈步前期)
骨盆 :5°后旋 髋关节:10°过伸展-0° 膝关节:0°- 35° 踝关节:0°- 20°跖屈 (关键点:膝关节被动屈曲)
第24页/共39页
迈步相初期
骨盆 :5°后旋 髋关节:0°- 20°屈曲 膝关节:35°- 60°屈曲 踝关节:20°- 10°跖屈
第25页/共39页
站立相 摆动相
股四头肌收缩活动始于摆动相末期,至支撑相 负重期达最大值。此时作为膝关节伸肌,产生 离心性收缩以控制膝关节屈曲度,从而使支撑 中期免于出现因膝关节过度屈曲而跪倒的情况
第30页/共39页
▪ 步行周期中,股四头肌的第二个较小的收
缩活动见于足跟离地后,足趾离地后达峰 值。此时具有双重作用:其一,作为髋关 节屈肌,提拉起下肢进入摆动相;其二, 作为膝关节伸肌,通过离心性收缩来限制 和控制小腿在摆动相初、中期向后的摆动, 从而使的动作过程中,从 膝关节最大屈曲摆 动到小腿与地面垂 直的时期。
第17页/共39页
迈步相末期 (85~100%GC)
▪ 从与地面垂直的
小腿向前摆动到 该侧足跟再次着 地之前。此时小 腿减速向前摆动。
第18页/共39页
2、步行 中关节运 动轨迹
第19页/共39页
足跟着地
骨盆 :5°旋前 髋关节:30° 屈曲 膝关节:0° 踝关节:0°
第37页/共39页
三、运动学分析在步态分析中的作用
▪ 1、膝塌陷步态:小腿三头肌无力或瘫痪,胫骨在
支撑相中期和末期前向行进过分,股四头肌代偿。
▪ 2、膝僵直:常股四头肌痉挛,导致拖足,常采用
划圈步态代偿。
第13页/共39页
足趾离地 (50~60%GC)
支撑腿足趾离地 的瞬间,标志着 站立相结束和迈 步相开始。
第14页/共39页
迈步相分期
▪ 初期 ▪ 中期 ▪ 末期
第15页/共39页
迈步相初期 (60~70%GC)
▪ 从支撑腿离地到
该腿膝关节达到 最大屈曲时。
第16页/共39页
迈步相中期 (70~85%GC)
第20页/共39页
承重反应期
骨盆 :5°旋前 髋关节:30° 屈曲 膝关节:0°-15 °屈曲 踝关节:0°-15 °跖屈
第21页/共39页
站立中期
骨盆 :中立位 髋关节:30°- 0° 膝关节:15°- 0° 踝关节:15°跖屈-10°背屈
第22页/共39页
足跟离地(站立末期)
骨盆 :5°后旋 髋关节:0°- 10°过伸展 膝关节:0° 踝关节:10°背屈-0° 趾关节:0°- 10°过伸展
第10页/共39页
足放平 (0~10%GC)
▪ 整个足底着地的
瞬间。即首次着 地至支撑腿于站 立相过程中膝关 节达到最大屈曲 角度的时期。
第11页/共39页
站立中期
(10~40%GC)
▪ 从对侧下肢离地
到躯干位于支撑 腿正上方。
第12页/共39页
足跟离地 (40~50%GC)
站立相中期过后, 支撑腿足跟离地 的瞬间。
迈步相中期
骨盆 :中立位 髋关节:20°- 30°屈曲 膝关节:60°- 30°屈曲 踝关节:10°跖屈- 0°
第26页/共39页
迈步相末期
骨盆 :5°旋前 髋关节:30°屈曲 膝关节:30°屈曲 - 0° 踝关节:0°
第27页/共39页
3、步行中的肌群活动
第28页/共39页
第29页/共39页
一、概述 二、步行周期的运动学特征
1、步行周期 2、步行中关节运动轨迹 3、步行中的肌群活动
三、运动学分析在步态分析中的作用
第1页/共39页
第2页/共39页
一、概述
▪ 行走及其步态是中枢神经系统的终极目标
在生物力学水平上的体现 。
生物学水平
生物力学水平
神经学水平 肌肉水平 关节水平
第3页/共39页
20% GC)。
第6页/共39页
单支撑 (single support)
行走中仅一侧下肢与地面接触 的时期。以秒为计时单位,或以 步行周期百分比表示。行走时, 一侧下肢单支撑期所占时间实际 上完全等于对侧下肢的迈步相时 间。
第7页/共39页
摆动相 (swing phase)
▪ 步行周期中从足趾离地到同侧足跟
第35页/共39页
▪ 臀大肌: 在摆动相后期臀大肌收缩,其目
的在于使向前摆动的大腿减速,为下一个 步行周期作准备。在支撑相,臀大肌起稳 定骨盆、控制躯干向前维持髋关节于伸展 位的作用。
第36页/共39页
▪ 髂腰肌:为对抗髋关节伸展,从支持相中
期开始至足趾离地前,髂腰肌呈离心性收 缩,最终使髋关节从支撑相末期由伸展转 为屈曲。髂腰肌第二次收缩活动始于摆动 相初期,使髋关节屈曲,以保证下肢向前 摆动。
第31页/共39页
站立相 摆动相
第32页/共39页
▪ 腘绳肌:摆动相末期,腘绳肌离心性收
缩使小腿向前的摆动减速,以配合臀大 肌收缩活动(使大腿向前摆动减速), 为足跟着地做准备。足跟着地时及着地 后,腘绳肌又作为伸髋肌,协助臀大肌 伸髋,同时通过稳定骨盆,防止躯干前 倾。
第33页/共39页
站立相 摆动相