(完整word版)液压系统回路设计
液压机液压系统设计

攀枝花学院学生课程设计说明书题目:液压传动课程设计——小型液压机液压系统设计学生姓名:学号:所在院系:机电工程学院专业:机械设计制造及其自动化班级:指导教师:职称:攀枝花学院教务处制攀枝花学院本科学生课程设计任务书注:任务书由指导教师填写。
摘要液压机是一种用静压来加工金属、塑料、橡胶、粉末制品的机械,在许多工业部门得到了广泛的应用。
液压传动系统的设计在现代机械的设计工作中占有重要的地位。
液体传动是以液体为工作介质进行能量传递和控制的一种传动系统。
本文利用液压传动的基本原理,拟定出合理的液压传动系统图,再经过必要的计算来确定液压系统的参数,然后按照这些参数来选用液压元件的规格。
确保其实现快速下行、慢速加压、保压、快速回程、停止的工作循环。
关键词:液压机、课程设计、液压传动系统设计AbstractHydraulic machine is a kind of static pressure to the processing of metal, plastic, rubber, the powder product of machinery, in many industrial department a wide range of applications. The design of the hydraulic drive system in modern mechanical design work occupies an important position. Transmission fluid is the liquid medium for the work carried out energy transfer and control of a transmission system.This paper using hydraulic transmission to the basic principle of drawing up a reasonable hydraulic system map ,and then after necessary calculation to determine the liquid pressure system parameters , Then according to the parameters to choose hydraulic components specification. To ensure the realization of the fast down, slow pressure, pressure maintaining, rapid return, stop work cycle.Key words:hydraulic machine, course design, hydraulic transmission system design.目录摘要 (I)Abstract (II)1 任务分析 (1)1.1技术要求 (1)1.2任务分析 (1)2 方案的确定 (2)2.1运动情况分析 (2)3 工况分析 (3)3.1工作负载 (3)3.2 摩擦负载 (3)3.3 惯性负载 (3)3.4 自重 (3)3.5 液压缸在各工作阶段的负载值 (3)4 负载图和速度图 (5)5 液压缸主要参数的确定 (6)5.1 液压缸主要尺寸的确定 (6)5.2 计算在各工作阶段液压缸所需的流量 (6)6 液压系统图 (9)6.1 液压系统图分析 (9)6.2 液压系统原理图 (9)7 液压元件的选择 (11)7.1液压泵的选择 (11)7.2 阀类元件及辅助元件 (11)7.3油箱的容积计算 (12)8 液压系统性能的运算 (13)8.1 压力损失和调定压力的确定 (13)8.2 油液温升的计算 (14)8.3 散热量的计算 (15)结论 (17)参考文献 (18)1 任务分析1.1技术要求设计一台小型液压压力机的液压系统,要求实现快速空程下行—慢速加压—保压—快速回程—停止的工作循环,快速往返速度为V=5.6 m/min,加压速度1V=70mm/min,其往复运动和加速(减速)时间t=0.02s,压制力为320000N,运2动部件总重为40000N,工作行程400mm,(快进380mm,工进20mm),静摩擦系数fs=0.2,动摩擦系数fd=0.1油缸垂直安装,设计该压力机的液压系统传动。
液压站集成回路及集成块设计说明书

液压与气压传动课程设计说明书题目液压站集成回路及集成块设计系别: ___________ 机械工程系 ________________专业:机械设计制造及其自动化班级:______________ 机制___________学号:_____________________________姓名:_____________________________指导教师: _________________________时间:2012 年1月目录设计题目二、前言 ......................................................................................1、 ............................................................................................................ 液压站2、 ............................................................................................................ 集成块连接装置2.1通用集成块组结构...........................................................................2.2集成块的特点...................................................................................2.3集成块装置设计步骤.......................................................................2.4集成块设计注意事项.......................................................................2.5过渡板................................................................................................三、液压集成块设计......................................................................1、液压集成回路设计..............................................................................2 、液压集成块及其设计.............................................................................2.1、底板及供油块设计........................................................................2.2、底盖及测压块设计........................................................................2.3、中间块设计....................................................................................2.4、集成块零件图的绘制......................................................................四、课程设计任务..........................................................................1、目的和意义 .......................................................................................2基本要3、原始资料…4、设计内谷…五、心的体会-六、致谢 ..........七、参考资料・一、设计题目题目液压站集成回路及集成块设计(图7.18a,型号为YJ25两种工作进给的速度换接回路两孔)尺寸要求:130x120x92二、前言1、液压站液压站是有液压油箱、液压泵装置及液压控制装置三大部分组成。
(完整word版)现代机械设计手册总目录

现代机械设计手册总目录(共6卷)化学工业出版社第1卷第1篇机械设计基础资料第1章常用资料和数据第2章法定计量单位和常用单位换算第3章优先数和优先数系第4章常用数学公式第5章常用力学公式第2篇零件结构设计第1章零件结构设计的基本要求和内容第2章铸件结构设计工艺性第3章锻压件结构设计工艺性第4章冲压件结构设计工艺性第5章切削件结构设计工艺性第6章热处理零件设计的工艺性要求第7章其他材料零件及焊接件的结构设计工艺性第8章零部件设计的装配及维修工艺性要求第3篇机械制图和几何精度设计第1章机械制图第2章尺寸精度第3章几何公差第4章表面结构第5章孔间距偏差第4篇机械工程材料第1章钢铁材料第2章有色金属材料第3章粉末冶金材料第4章复合材料第5章非金属材料第5篇连接件与紧固件第1章连接设计基础第2章螺纹连接第3章键、花键和销的连接第4章过盈连接第5章胀套及型面连接第6章焊、铆、粘连接第7章锚固连接第2卷第6篇轴和联轴器第1章轴第2章软轴第3章联轴器第7篇滚动轴承第1章滚动轴承的分类、结构型式及代号第2章滚动轴承的特点与选用第3章滚动轴承的计算第4章滚动轴承的应用设计第5章常用滚动轴承的基本尺寸及性能参数第8篇滑动轴承第1章滑动轴承的分类、特点与应用及选择第2章滚动轴承材料第3章不完全流体润滑轴承第4章液体动压润滑轴承第5章液体静压轴承第6章气体润滑轴承第7章箔片气体轴承第8章流体动静压润滑轴承第9章电磁轴承第9篇机架、箱体及导轨第1章机架结构设计基础第2章机架的设计与计算第3章齿轮传动箱体的设计与计算第4章机架与箱体的现代设计方法第5章导轨第10篇弹簧第1章弹簧的基本性能、类型及应用第2章圆柱螺旋弹簧第3章非线性特性线螺旋弹簧第4章多股螺旋弹簧第5章蝶形弹簧第6章环形弹簧第7章片弹簧及线弹簧第8章板弹簧第9章发条弹簧第10章扭杆弹簧第11章弹簧的热处理、强化处理和表面处理第12章橡胶弹簧第13章空气弹簧第14章膜片及膜盒第15章压力弹簧管第16章弹簧的疲劳强度第17章弹簧的失效及预防第11篇机构第1章结构的基本知识和结构分析第2章基于杆组解析法平面结构的运动分析和受力分析第3章连杆机构的设计及运动分析第4章平面高副结构设计第5章凸轮机构设计第6章其他常用机构第7章组合机构的设计第8章机构选型范例第12篇机械零部件设计禁忌第1章连接零部件设计禁忌第2章传动零部件设计禁忌第3章轴系零部件设计禁忌第3卷第13篇带、链传动第1章带传动第2章链传动第14篇齿轮传动(完整word版)现代机械设计手册总目录第1章渐开线圆柱齿轮传动第2章圆弧圆柱齿轮传动第3章锥齿轮传动第4章蜗杆传动第5章渐开线圆柱齿轮行星传动第6章渐开线少齿差行星齿轮传动第7章摆线针轮行星传动第8章谐波齿轮传动第9章活齿传动第10章塑料齿轮第15篇减速器、变速器第1章减速器设计一般资料第2章标准减速器及产品第3章机械无级变速器及产品第16篇离合器、制动器第1章离合器第2章制动器第17篇润滑第1章润滑基础第2章润滑剂第3章轴承的润滑第4章齿轮传动的润滑第5章其他元器件的润滑第6章润滑方法及润滑装置第7章典型设备的润滑第18篇密封第1章密封的分类及应用第2章垫片密封第3章密封胶及胶黏剂第4章填料密封第5章成形填料密封第6章油封第7章机械密封第8章真空密封第9章迷宫密封第10章浮环密封第11章螺旋密封第12章磁流体密封第13章离心密封第4卷第19篇液力传动第1章液力传动设计基础第2章液力变矩器第3章液力机械变矩器第4章液力耦合器第5章液黏传动第20篇液压传动与控制第1章常用基础标准、图形符号和常用术语第2章液压流体力学常用计算公式及资料第3章液压系统设计第4章液压基本回路第5章液压工作介质第6章液压缸第7章液压控制阀第8章液压泵第9章液压马达第10章液压辅件与液压泵站第11章液压控制系统概述第12章液压伺服控制系统第13章电液比例控制系统第21篇气压传动与控制第1章气压传动技术基础第2章气动系统第3章气动元件的造型及计算第4章气动系统的维护及故障处理第5章气动元件产品第6章相关技术标准及资料第5卷第22篇光机电一体化系统设计第1章光机电一体化系统设计基础第2章传感检测系统设计第3章伺服系统设计第4章机械系统设计第5章微机控制系统设计第6章接口设计第7章设计实例第23篇传感器第1章传感器的名词术语和评价指标第2章力参数测量传感器第3章位移和位置传感器第4章速度传感器第5章振动与冲击测量传感器第6章流量和压力测量传感器第7章温度传感器第8章声传感器第9章厚度、距离、物位和倾角传感器第10章孔径、圆度和对中仪第11章硬度、密度、粉尘度和黏度传感器第12章新型传感器第24篇控制元器件和控制单元第1章低压电器第2章单片机第3章可编程控制器(PLC)第4章变频器第5章工控机第6章数控系统第25篇电动机第1章常用驱动电动机第2章控制电动机第3章信号电动机和微型电动机第6卷第26篇机械振动与噪声第1章概述第2章机械振动基础第3章机械振动的一般资料第4章非线性振动与随机振动第5章机械振动控制第6章典型设备振动设计实例第7章轴系的临界转速第8章机械振动的作用第9章机械振动测量第10章机械振动信号处理与故障诊断第11章机械噪声基础第12章机械噪声测量第13章机械噪声控制第27篇疲劳强度设计第1章机械零部件疲劳强度与寿命第2章疲劳失效影响因素与提高疲劳强度的措施第3章高周疲劳强度设计方法第4章低周疲劳强度设计方法第5章裂纹扩展寿命估算方法第6章疲劳实验与数据处理第28篇可靠性设计第1章机械失效与可靠性第2章可靠性设计流程第3章可靠性数据及其统计分布第4章故障模式、效应及危害度分析第5章故障树分析第6章机械系统可靠性设计第7章机械可靠性设计第8章零件静强度可靠性设计第9章零部件动强度可靠性设计第10章可靠性评价第11章可靠性试验与数据处理第29篇优化设计第1章概述第2章一维优化搜索方法第3章无约束优化算法第4章有约束优化算法第5章多目标优化设计方法第6章离散问题优化设计方法第7章随机问题优化设计方法第8章机械模糊优化设计方法第9章机械优化设计应用实例第30篇反求设计第1章概述第2章反求数字化数据测量设备第3章反求设计中的数据预处理第4章三维模型重构技术第5章常用反求设计软件与反求设计模第6章反求设计实例第31篇数字化设计第1章概述第2章数字化设计系统的组成第3章计算机图形学基础第4章产品的数字化造型第5章计算机辅助设计技术第6章有限元分析技术第7章虚拟样机技术第32篇人机工程与产品造型设计第1章概述第2章人机工程第3章产品造型设计第33篇创新设计第1章创新的理论和方法第2章创新设计理论和方法第3章发明创造的情景分析与描述第4章技术系统进化理论分析第5章技术冲突及其解决原理第6章技术系统物-场分析模型第7章发明问题解决程序—-ARIZ法。
矿用挖沟机的液压系统设计
为实 现行走 部 无极 调 速 和对 油 缸 的 控 制 , 制 阀 控
动力装置 、 机棚 、 底盘 、 分动箱 、 架和 驾驶 室组成 , 中 机 其
工作 装置 由链 轮 、 摇臂 及摇臂油 缸等 , 图 1 示 。 如 所
液 压 系统
选用 多路 阀 ( 联 ) 其 中 , 制 手 柄 的控 制 方 式 为 小 五 , 控
中, 物料 被直接 排 到后 续 处 理 装 置 , 胶 带输 送 机 , 如 随
械化 进程 加快 , 而煤 矿井 下 巷 道 排 水 沟 都 是 靠 人 工挖 掘 的 , 动强 度大 , 沟速度 慢 且效 果不 好 , 时耗 工 , 劳 成 耗 给煤 矿安 全生 产带 来诸 多 困难 。采 掘机 械化极 度 不平
P一 = /Tk = 1 .1 /1 4 = 1 7. 4 ba 78 4 . 2 2 r
作者简介 : 谢蕾 ( 9 3 ) 女 , 17 一 , 汉族 , 江苏南 京人 , 讲师 , 程 工 硕士 , 主要从事机械设计 与制造 。
降 。后 泵 的输 出流量 大小 由阀组 l 2来控 制 . 过操 纵 通
Ba e n Mo a ay i s d o d lAn lss
XI Le E i
( 淄博 职业 学院 ,山东 淄博
25 1 ) 5 34
摘
要 : 压机 座是 一 种新 型的 减振设 备 , 液 可以应 用 于交通 、 空航 天等领 域 , 了能够提 高液压机 座 的 航 为
减振 设 计水 平 , 究 了模 态 分析在 其 中的应 用 。首 先 , 研 分析 了液压 机座 的减 振模 型 ; 然后 , 分析 了液 压机 座模
3 . , 定 输 出扭 矩 2 0 0 N 最 大 输 出扭 矩 2 0 0 36 额 0 0 m, 50 N 最 大输 入转 速 2 0 p 机 械效 率 为 0 9 。 m, 0 0rm, . 5 设
液压挖掘机液压系统设计说明书

前言挖掘机作为一种多功能机械产品,目前被广泛应用于水利工程,交通运输,电力工程和矿山采掘等机械施工中。
它能在减轻繁重的体力劳动,保证工程质量,加快工程建设速度以及提高劳动生产率方面起着十分重要的作用。
近年从国内情况来看,我国的挖土机市场90%被外国独资或合资企业垄断,我国挖土机行业整体发展水平较国外缓慢,在挖土机液压系统方面的理论还相对国外比较薄弱。
国内大部分挖土机企业在挖土机液压系统传统技术方面的研究具有一定基础,但由于采用传统液压系统的挖土机产品在性能、质量、作业效率、可靠性等方面均较差,因此采用传统液压系统的挖土机在国内市场上基本失去了竞争力。
液压系统是挖土机的核心部分,通过挖土机液压系统设计计算优化能有效的提高挖土机性能,本挖土机具有工作可靠、结构简单、性能好、成本低、效率高等特点。
我国是一个发展中国家,在辽阔的国土上正在进行大规模的经济建设,这就需要大量的土石方施工机械为其服务,而液压挖掘机是最重要的一类土石方施工机械。
因此,可以肯定液压挖掘机的发展空间很大.可以预见,随着国家经济建设的不断发展,液压挖掘机的需求量将逐年大幅度增长.今后几年我国液压挖掘机行业将会有一个很大的发展,液压挖掘机的年产量将会以高于20%的速度增长。
本设计根据给定的工作要求进行工况分析,以确定系统的主要参数,对液压系统的基本回路的方案进行分析,拟订液压系统原理图;选择液压元件并进行液压系统的性能验算,最后完成工作图,编制技术文件。
希望本设计能为从事液压工作的人员献上微薄之力!摘要液压挖掘机是工程机械的一个重要品种,是一种广泛用于建筑、铁路、公路、水利、采矿等建设工程的土方机械。
液压挖掘机利用液压元件(液压泵、液压马达、液压缸等)带动各种构件动作,具有许多优点。
它对液压系统的设计提出很高的要求,其液压系统也是工程机械液压系统中最为复杂的。
因此,对挖掘机液压系统的分析设计对推动我国挖掘机发展具有十分重要的意义。
在搜集了国内外挖掘机液压系统相关资料的基础上,了解了挖掘机液压系统的发展历史,并对挖掘机液压系统的技术发展动态进行了分析总结.本次毕业设计课题是挖掘机液压系统的设计。
(完整word版)液压与气动技术教案
机电工程学院《液压与气动技术》授课教案课题液压传动基础知识课次2授课班级学时2上课地点教学目标能力目标知识目标素质目标1、独立分析能力2、设备拆装、维护维修能力3、根据原理图进行实物连接4、系统回路设计及其应用1、各元件符号识别2、基本回路的分析3、复杂回路的分析4、简单系统的设计及其应用1、岗位精神2、团队合作意识的培养3、培养良好的设备维护和保养意识4、注意开启系统和关闭系统时的注意事项教学重点与难点重点:1、初步认识油压千斤顶并学会使用2、油压千斤顶工作原理分析3、认识平面磨床工作台及其液压系统组成4、初步学会分析系统回路5、独立分析组合机床工作台液压系统工作原理难点:1、组合机床工作台原理示意图2、分析组合机床工作台教学过程主要教学内容备注讲授50 min 一、油压千斤顶在实际生活工业中的应用介绍1、油压千斤顶实物认识图1 立式油压千斤顶实物多媒体手段加强认识和了解1—杠杆手柄; 2。
小活塞;3-小油缸;4、5-单向阀;6—大油缸;7-大活塞;8-重物;9-卸油阀;10-油箱图2 液压千斤顶的工作原理示意图2、油压千斤顶工作原理分析通过生产中经常见到的液压千斤顶来了解液压传动的工作原理,图2所示为该液压系统的工作原理示意图。
由图可知,该系统由举升液压缸和手动液压泵两部分组成,大油缸6、大活塞7、单向阀5和卸油阀9组成举升液压缸,杠杆手柄1、小活塞2、小油缸3、单向阀4和5组成手动液压泵。
活塞和缸体之间既保持良好的配合关系,又能实现可靠的密封。
提起手柄1使小活塞2向上移动,小活塞2下端密封的油腔容积增大,形成局部真空,这时单向阀5关闭并阻断其所在的油路,而单向阀4打开使其所在油路畅通,油箱10中的液压油就在大气压的作用下通过吸油管道进入并充满小缸体3,完成一次吸油动作;用力压下手柄1,小活塞2下移,小活塞2下腔容积减小,腔内压力升高,这时单向阀4关闭同时阻断其所在的油路,当压力升高到一定值时单向阀5打开,小油缸3中的油液经管道输入大油缸6的下腔,由于卸油阀9处于关闭状态,大油缸6中的液压油增多迫使大活塞7向上移动,顶起重物.再次提起手柄吸油时,单向阀5自动关闭,使油液不能倒流,从而保证了重物不会自行下落。
(完整word版)液压系统回路设计

1、液压系统回路设计1.1、 主干回路设计对于任何液压传动系统来说, 调速回路都是它的核心部分。
这种回路可以通过事先的调整或在工作过程中通过自动调整来改变元件的运行速度, 但它的主要功能却是在传递动力(功率)。
根据伯努力方程: 2d v p q C x ρ∆= (1-1)式中 q ——主滑阀流量d C ——阀流量系数v x ——阀芯流通面积p ∆——阀进出口压差ρ——流体密度其中 和 为常数, 只有 和 为变量。
液压缸活塞杆的速度:q v A= (1-2) 式中A 为活塞杆无杆腔或有杆腔的有效面积一般情况下, 两调平液压缸是完全一样的, 即可确定 和 所以要保证两缸同步, 只需使 , 由式(1-2)可知, 只要主滑阀流量一定, 则活塞杆的速度就能稳定。
又由式(1-1)分析可知, 如果 为一定值, 则主滑阀流量 与阀芯流通面积成正比即: ,所以要保证两缸同步, 则只需满足以下条件:, 且此处主滑阀选择三位四通的电液比例方向流量控制阀,如图1-1所示。
图1-1 三位四通的电液比例方向流量控制阀它是一种按输入的电信号连续地、按比例地对油液的流量或方向进行远距离控制的阀。
比例阀一般都具有压力补偿性能, 所以它输出的流量可以不受负载变化的影响。
与手动调节的普通液压阀相比, 它能提高系统的控制水平。
它和电液伺服阀的区别见表1-1。
表1-1 比例阀和电液伺服阀的比较项目 比例阀 伺服阀低, 所以它被广泛应用于要求对液压参数进行连续远距离控制或程序控制, 但对控制精度和动态特性要求不太高的液压系统中。
又因为在整个举身或收回过程中, 单缸负载变化范围变化比较大(0~50T), 而且举身和收回时是匀速运动, 所以调平缸的功率为, 为变功率调平, 为达到节能效果, 选择变量泵。
综上所可得, 主干调速回路选用容积节流调速回路。
容积节流调速回路没有溢流损失, 效率高, 速度稳定性也比单纯容积调速回路好。
为保证值一定, 可采用负荷传感液压控制, 其控制原理图如图1-2所示。
(完整word版)液压缸设计说明书(word文档良心出品)
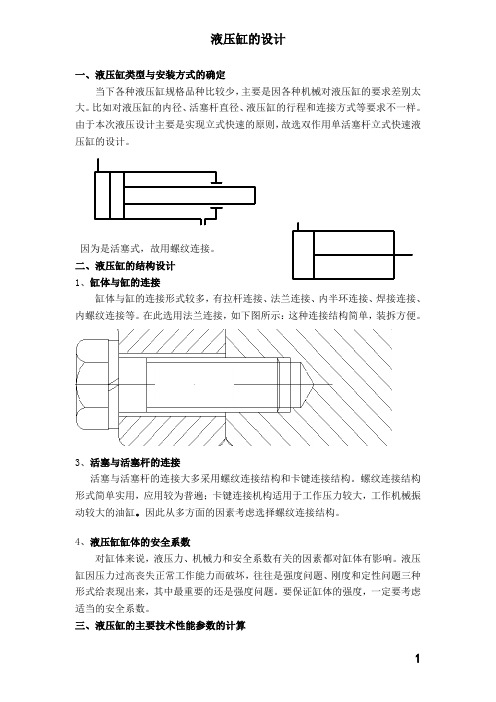
液压缸的设计一、液压缸类型与安装方式的确定当下各种液压缸规格品种比较少,主要是因各种机械对液压缸的要求差别太大。
比如对液压缸的内径、活塞杆直径、液压缸的行程和连接方式等要求不一样。
由于本次液压设计主要是实现立式快速的原则,故选双作用单活塞杆立式快速液压缸的设计。
因为是活塞式,故用螺纹连接。
二、液压缸的结构设计1、缸体与缸的连接缸体与缸的连接形式较多,有拉杆连接、法兰连接、内半环连接、焊接连接、内螺纹连接等。
在此选用法兰连接,如下图所示:这种连接结构简单,装拆方便。
3、活塞与活塞杆的连接活塞与活塞杆的连接大多采用螺纹连接结构和卡键连接结构。
螺纹连接结构形式简单实用,应用较为普遍;卡键连接机构适用于工作压力较大,工作机械振动较大的油缸。
因此从多方面的因素考虑选择螺纹连接结构。
4、液压缸缸体的安全系数对缸体来说,液压力、机械力和安全系数有关的因素都对缸体有影响。
液压缸因压力过高丧失正常工作能力而破坏,往往是强度问题、刚度和定性问题三种形式给表现出来,其中最重要的还是强度问题。
要保证缸体的强度,一定要考虑适当的安全系数。
三、液压缸的主要技术性能参数的计算(一)、压力所谓压力,是指作用在单位面积上的负载。
从液压原理可知,压力等于负载力与活塞的有效工作面积之比。
P=F/A(N/m2)式中:F—作用在活塞上的负载力(N)A—活塞的有效工作面积(m2)从上述可知,压力值的建立是因为负载力的存在而产生的,在同一个活塞的有效工作面积上,负载越大,所需的压力就越大,活塞产生的作用力就越大。
如果活塞的有效工作面积一定,压力越大,活塞产生的作用力就越大。
由此可知:1、根据负载力的大小,选择活塞面积合适的液压缸和压力适当的液压泵。
2、根据液压泵的压力和负载力,设计和选用合适的液压缸。
3、根据液压缸的压力和液压缸的活塞面积,确定负载的重量。
在液压系统中,为了便于液压元件和管路的设计选用,往往将压力分级。
见下表因本次液压缸的设计要求中已知的公称压力为30Mpa,由表1.1可知,本此液压缸属于高压。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、液压系统回路设计
1.1、 主干回路设计
对于任何液压传动系统来说,调速回路都是它的核心部分。
这种回路可以通过事先的调整或在工作过程中通过自动调整来改变元件的运行速度,但它的主要功能却是在传递动力(功率)。
根据伯努力方程:
d q C x = (1-1)
式中 q ——主滑阀流量
d C ——阀流量系数
v x ——阀芯流通面积
p ∆——阀进出口压差
ρ——流体密度
其中d C 和ρ为常数,只有v x 和p ∆为变量。
液压缸活塞杆的速度:
q v A
= (1-2) 式中A 为活塞杆无杆腔或有杆腔的有效面积
一般情况下,两调平液压缸是完全一样的,即可确定1121A A =和1222A A =所以要保证两缸同步,只需使12q q =,由式(1-2)可知,只要主滑阀流量一定,则活塞杆的速度就能稳定。
又由式(1-1)分析可知,如果p ∆为一定值,则主滑阀流量q 与阀芯流通面积成正比即:v q x ∞,所以要保证两缸同步,则只需满足以下条件:
11p c ∆=,22p c ∆=且12v v x x =
此处主滑阀选择三位四通的电液比例方向流量控制阀,如图1-1所示。
图1-1 三位四通的电液比例方向流量控制阀
它是一种按输入的电信号连续地、按比例地对油液的流量或方向进行远距离控制的阀。
比例阀一般都具有压力补偿性能,所以它输出的流量可以不受负载变化的
影响。
与手动调节的普通液压阀相比,它能提高系统的控制水平。
它和电液伺服阀的区别见表1-1。
表1-1 比例阀和电液伺服阀的比较
所以它被广泛应用于要求对液压参数进行连续远距离控制或程序控制,但对控制精度和动态特性要求不太高的液压系统中。
又因为在整个举身或收回过程中,单缸负载变化范围变化比较大(0~50T),而且举身和收回时是匀速运动,所以调平缸的功率为P Fv
=,为变功率调平,为达到节能效果,选择变量泵。
综上所可得,主干调速回路选用容积节流调速回路。
容积节流调速回路没有溢流损失,效率高,速度稳定性也比单纯容积调速回路好。
为保证p∆值一定,可采用负荷传感液压控制,其控制原理图如图1-2所示。
它主要利用负荷传感和压力补偿技术,可用单泵(或一组泵)驱动多个执行元件,各执行元件运动速度仅依赖于各节流阀开启度,而与各执行元件的负载压力和其它执行元件的工作状态无关。
即使当泵的输出流量达不到实际需要时,各执行元件运动速度的比例关系仍然可以得到保持。
此系统的这一特有的独立调速功能大大减少了作业中操纵者协调各执行元件动作所花费的时间,不但显著提高了作业效率,而且有效减轻了操作者的劳动强度。
另外,能够以最节省能量的方式实现调速,系统无溢流损失,并以推动执行元件动作所需的最低压力供油。
在工作间隙(发动机不停机,各执行元件处于无载状态,不动作),系统自动调节泵的排量到最小值。
可以有效降低功率损耗、减小液压系统的温升,所以它是一种性能较好的新型液压系统。
一般的同步回路还有:机械连接同步回路;用分流阀或分流集流阀的同步回路;用调速阀的同步回路;串联缸的同步回路等,但这些同步回路同步精度一般比较低,而且大多数只是保证速度同步而不能保证位置同步,受负载变化的影响较大。
图1-2 LS 同步控制系统原理图 图中两个执行元件中的最高压力,可以通过单向阀选出,作为负荷传感压力LS P 分别引到负荷传感阀和各压力补偿阀的弹簧腔。
当负荷传感阀芯及各压力补偿阀芯达到平衡时,各节流口前压力1p 为负荷传感压力LS P 加上负荷传感阀下腔弹簧压力KL p ; 各节流口后压力2p 均为负荷传感压力LS P 加上压力补偿阀左腔弹簧压力KC p ,两节流口压力差为:
12KL KC p p p p p ∆=-=-
可知,p ∆只与两弹簧弹力有关,所以只要保证两弹簧压力差恒定,则p ∆值基本为一定值。
因而通过各节流口流向执行元件的流量与各节流口大小有关,而与每一执行元件的负载压力无关。
为保证桅杆工作时的垂直度,选用一种倾角传感器,将检查到的角度偏差信号转换成电信号,控制电液比例方向流量控制阀,从而调节桅杆的垂直度。
组干回路如图1-3所示。
图1-3 主干回路
1、2 其它回路选择
1、平衡回路
平衡回路的功用在于防止垂直或倾斜放置的液压缸和与之相连的工作部件因自重而自行下落。
桅杆后仰和前倾时都要平衡,因此连接油缸两端的回油路上都要设有起平衡作用的阀。
下面主要考虑两种平衡回路,分别如图1-4和1-5所
示。
图1-4 用直控平衡阀的平衡回路
用直控平衡阀的平衡回路。
调整平衡阀的开启压力,使其稍大于立式液压缸活塞及其工作部件自重在液压缸下腔所产生的压力,活塞部件则不会因自重而下落。
活塞下降时,运动平稳,但功耗较大。
图1-5 用远控平衡阀平衡的回路
用远控平衡阀平衡的平衡回路。
远控平衡阀的开启取决于控制压力,与载荷无关。
在活塞下行时,平衡阀被控制油打开,被压很小,故系统效率较高。
但活塞部件有可能加速下滑,以致产生振荡,所以应在平衡阀的控制口接入节流阀。
2、锁紧回路
锁紧回路的功用是在液压执行元件不工作时切断其进、出油通道,确切地使是它保持在既定的位置上。
下面也主要考虑两种锁紧回路,如图1-6和1-7所示。
图1-6 用换向阀锁紧的回路
用换向阀锁紧的回路。
三位四通换向阀在中位时,分别与油缸相连的两油路被封闭,构成了双向锁紧回路。
采用换向阀锁紧,回路简单,但是锁紧精度较低。
图1-7 用液控单向阀双向锁紧的回路
用液控单向阀双向锁紧的回路。
用两个液控单向阀可实现对液压缸的双向锁紧。
图示位置时,液压泵卸荷,两个液控单向阀均为关闭,活塞被所在不动。
活塞可以在任意位置被锁紧。
考虑桅杆的功能要求:由于桅杆自身重力的作用,举身过程要比较平稳,而且在任意位置要能被锁定,所以被压阀的压力值要设得比较小;工作是也要很好的被锁住;前倾是也要平稳和能被锁住,所以被压阀值要设得比较大。
再考虑
到平衡和锁紧的功能,可以使用液控平衡阀来同时实现这两个作用。
其原理如图1-8所示。
图1-8 用液控平衡阀的平衡锁紧回路
举身过程中,开始时桅杆自重对液压缸的压力比较大,进油路压力很大,所以回油路上的被压值很小,随着举身过程的进行桅杆自重对缸的压力减小,回油路上的被压值也随着增加。
前倾过程中,进油路上压力值很小,所以回油路上的被压值特别大,收回过程和此分析相反。
要锁紧时可以可以用换向阀切断进油路,从而靠平衡阀直接锁住。
1、3 液压回路综合
把上面选出的各种回路组合画在一起,再经过修改、整理后,可得到总的液压系统原理图,如图1-9所示。
图1-9液压系统原理图
1-负荷传感变量泵 2-单向阀 3-三位四通电液比例换向阀 4-平衡阀 5-单向阀
6-梭阀 7-负荷传感阀 8-压力切断阀 9-压力补偿阀 10-滤油器。